


Study of Pose Estimation Based on Spatio-Temporal Characteristics of Cow Skeleton

Abstract
1. Introduction
- Proposing a skeleton extraction method based on PAFs and PCMs for accurately extracting the skeletons of multiple cows in complex environments;
- Performing pose estimation utilizing the spatio-temporal information derived from the cows’ skeletons.
2. Materials and Methods
2.1. Video Acquisition
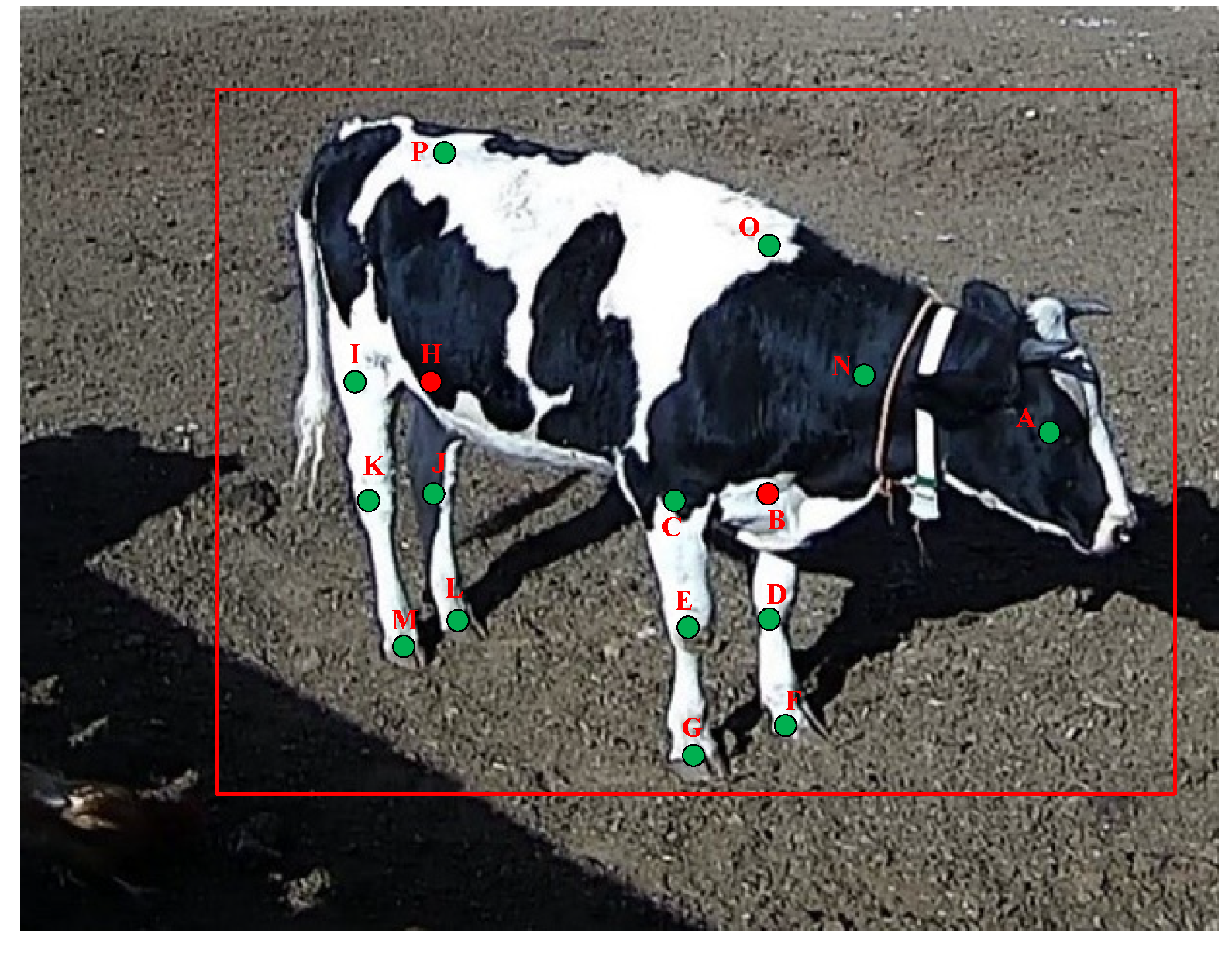
2.2. Image Labeling
2.2.1. Skeleton Extraction Dataset
2.2.2. Pose Estimation Dataset
2.3. Methods
2.3.1. Skeleton Extraction
2.3.2. Pose Estimation
3. Results
3.1. Evaluation of Skeleton Extraction Models
3.2. Evaluation of Pose Estimation Models
- Smoothness and differentiability. GELU is a continuously differentiable and smooth non-linear function, while ReLU is a piecewise linear function. The smoothness reduces abrupt changes in gradient calculations, promoting stability in parameter updates for the network.
- Approximate Identity Mapping. When the input is close to zero, the output of the GELU activation function closely resembles the input. This property facilitates the preservation of information transfer and flow.
4. Discussion
4.1. Analysis of the Influence of Image Quality on Keypoints Extraction and Pose Estimation
4.2. Analysis of the Effect of the Mutual Occlusion of Scenes and Cows on Pose Estimation
4.3. Analysis of the Effect of Pose Variation on Pose Estimation
5. Conclusions
- In the actual farm environment, there is often noise in the images acquired by the equipment. Gaussian filtering was employed to mitigate the impact of noise on the accuracy of detection by effectively removing it from the image. The experimental results demonstrate a slight increase in the APK values of the leg keypoints for the three poses after applying Gaussian filtering, reaching 90.31%, 89.48%, and 88.67%, respectively. This observation suggests that the image quality directly influences the detection process. Considering that Gaussian filtering induces image blurring, subsequent work will incorporate super-resolution techniques to enhance the image resolution.
- The presence of mutual occlusion among cows can result in a decrease in the number of detectable keypoints, consequently leading to a decline in detection accuracy. When the head of the cow faces or turns away from the camera, the number of detectable keypoints is reduced, resulting in decreased detection accuracy and potential missed detections in severe cases. However, cows on real farms are rarely obstructed for extended periods of time. Therefore, this study exhibits a certain degree of stability and can be employed for cow pose estimation. In future work, multi-view fusion will be leveraged to gather extensive cow pose information from multiple cameras or views, thereby mitigating the impact of partial occlusion.
- The accuracy slightly decreased when the cow transitioned between standing and walking poses. In practical scenarios, these pose transitions typically happen briefly, resulting in a relatively minor impact on the accuracy of detection. The accuracy rate of the lying pose is relatively high as its features are more distinct compared to standing and walking poses. In future work, we will increase the number of frames to enhance the network’s ability to capture precise keypoint information, thereby improving detection accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Li, R.; Wang, Z.; Hua, Z.; Jiao, Y.; Duan, Y.; Song, H. E3D: An efficient 3D CNN for the recognition of dairy cow’s basic motion behavior. Comput. Electron. Agric. 2023, 205, 107607. [Google Scholar] [CrossRef]
- Pereira, T.D.; Tabris, N.; Li, J.; Ravindranath, S.; Papadoyannis, E.S.; Wang, Z.Y.; Turner, D.M.; McKenzie-Smith, G.; Kocher, S.D.; Falkner, A.L. SLEAP: Multi-animal pose tracking. BioRxiv 2020. BioRxiv:2031.276246. [Google Scholar]
- Hahn-Klimroth, M.; Kapetanopoulos, T.; Gübert, J.; Dierkes, P.W. Deep learning-based pose estimation for African ungulates in zoos. Ecol. Evol. 2021, 11, 6015–6032. [Google Scholar] [CrossRef]
- Dargan, S.; Kumar, M. A comprehensive survey on the biometric recognition systems based on physiological and behavioral modalities. Expert Syst. Appl. 2020, 143, 113114. [Google Scholar] [CrossRef]
- Riaboff, L.; Relun, A.; Petiot, C.-E.; Feuilloy, M.; Couvreur, S.B.; Madouasse, A.l. Identification of discriminating behavioural and movement variables in lameness scores of dairy cows at pasture from accelerometer and GPS sensors using a Partial Least Squares Discriminant Analysis. Prev. Vet. Med. 2021, 193, 105383. [Google Scholar] [CrossRef]
- Taneja, M.; Byabazaire, J.; Jalodia, N.; Davy, A.; Olariu, C.; Malone, P. Machine learning based fog computing assisted data-driven approach for early lameness detection in dairy cattle. Comput. Electron. Agric. 2020, 171, 105286. [Google Scholar] [CrossRef]
- Han, J.; Wang, J. Dairy Cow Nutrition and Milk Quality. Agriculture 2023, 13, 702. [Google Scholar] [CrossRef]
- McDonagh, J.; Tzimiropoulos, G.; Slinger, K.R.; Huggett, Z.J.; Down, P.M.; Bell, M.J. Detecting dairy cow behavior using vision technology. Agriculture 2021, 11, 675. [Google Scholar] [CrossRef]
- Nyambo, D.G.; Clemen, T. Differential Assessment of Strategies to Increase Milk Yield in Small-Scale Dairy Farming Systems Using Multi-Agent Modelling and Simulation. Agriculture 2023, 13, 590. [Google Scholar] [CrossRef]
- Speroni, M.; Malacarne, M.; Righi, F.; Franceschi, P.; Summer, A. Increasing of posture changes as indicator of imminent calving in dairy cows. Agriculture 2018, 8, 182. [Google Scholar] [CrossRef]
- Maw, S.Z.; Zin, T.T.; Tin, P.; Kobayashi, I.; Horii, Y. An Absorbing Markov Chain Model to Predict Dairy Cow Calving Time. Sensors 2021, 21, 6490. [Google Scholar] [CrossRef]
- Lodkaew, T.; Pasupa, K.; Loo, C.K. CowXNet: An automated cow estrus detection system. Expert Syst. Appl. 2023, 211, 118550. [Google Scholar] [CrossRef]
- Shorten, P.; Hunter, L. Acoustic sensors for automated detection of cow vocalization duration and type. Comput. Electron. Agric. 2023, 208, 107760. [Google Scholar] [CrossRef]
- Li, Q.; Chu, M.; Kang, X.; Liu, G. Temporal aggregation network using micromotion features for early lameness recognition in dairy cows. Comput. Electron. Agric. 2023, 204, 107562. [Google Scholar] [CrossRef]
- Gong, C.; Zhang, Y.; Wei, Y.; Du, X.; Su, L.; Weng, Z. Multicow pose estimation based on keypoint extraction. PLoS ONE 2022, 17, e0269259. [Google Scholar] [CrossRef]
- da Silva Santos, A.; de Medeiros, V.W.C.; Gonçalves, G.E. Monitoring and classification of cattle behavior: A survey. Smart Agric. Technol. 2022, 3, 100091. [Google Scholar] [CrossRef]
- Fan, Q.; Liu, S.; Li, S.; Zhao, C. Bottom-up cattle pose estimation via concise multi-branch network. Comput. Electron. Agric. 2023, 211, 107945. [Google Scholar] [CrossRef]
- Li, X.; Cai, C.; Zhang, R.; Ju, L.; He, J. Deep cascaded convolutional models for cattle pose estimation. Comput. Electron. Agric. 2019, 164, 104885. [Google Scholar] [CrossRef]
- Russello, H.; van der Tol, R.; Kootstra, G. T-LEAP: Occlusion-robust pose estimation of walking cows using temporal information. Comput. Electron. Agric. 2022, 192, 106559. [Google Scholar] [CrossRef]
- Geng, Z.; Sun, K.; Xiao, B.; Zhang, Z.; Wang, J. Bottom-up human pose estimation via disentangled keypoint regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 14676–14686. [Google Scholar]
- Papandreou, G.; Zhu, T.; Chen, L.-C.; Gidaris, S.; Tompson, J.; Murphy, K. Personlab: Person pose estimation and instance segmentation with a bottom-up, part-based, geometric embedding model. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 269–286. [Google Scholar]
- Cao, Z.; Hidalgo, G.; Simon, T.; Wei, S.-E.; Sheikh, Y. OpenPose: Realtime multi-person 2D pose estimation using Part Affinity Fields. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 172–186. [Google Scholar] [CrossRef]
- Osokin, D. Real-time 2d multi-person pose estimation on cpu: Lightweight openpose. arXiv 2018, arXiv:1811.12004. [Google Scholar]
- Kreiss, S.; Bertoni, L.; Alahi, A. Openpifpaf: Composite fields for semantic keypoint detection and spatio-temporal association. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13498–13511. [Google Scholar] [CrossRef]
- Farha, Y.A.; Gall, J. Ms-tcn: Multi-stage temporal convolutional network for action segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3575–3584. [Google Scholar]
- Huang, Y.; Sugano, Y.; Sato, Y. Improving action segmentation via graph-based temporal reasoning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 14024–14034. [Google Scholar]
- Lv, X.; Wang, S.; Chen, T.; Zhao, J.; Chen, D.; Xiao, M.; Zhao, X.; Wei, H. Human gait analysis method based on sample entropy fusion AlphaPose algorithm. In Proceedings of the 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 22–24 May 2021; pp. 1543–1547. [Google Scholar]
- Hendrycks, D.; Gimpel, K. Gaussian error linear units (gelus). arXiv 2016, arXiv:1606.08415. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 13713–13722. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Algorithms | Precision (0.6) | Recall (0.6) | F1 (0.6) | Precision (0.8) | Recall (0.8) | F1 (0.8) |
|---|---|---|---|---|---|---|
| MS-TCN | 87.87% | 73.13% | 79.83% | 91.15% | 61.12% | 73.17% |
| SMS-TCN | 89.29% | 78.05% | 83.26% | 93.06% | 71.45% | 80.84% |
| MHMS-TCN | 88.08% | 76.38% | 81.81% | 92.18% | 70.36% | 78.94% |
| CMS-TCN | 89.43% | 80.03% | 84.47% | 93.83% | 78.64% | 85.57% |
| Types of Algorithms | Precision (0.6) | Recall (0.6) | F1 (0.6) | Precision (0.8) | Recall (0.8) | F1 (0.8) |
|---|---|---|---|---|---|---|
| MS-TCN | 89.13% | 81.57% | 85.17% | 91.97% | 68.9% | 78.78% |
| SMS-TCN | 92.45% | 81.79% | 86.79% | 93.98% | 74.34% | 81.9% |
| MHMS-TCN | 91.93% | 84.13% | 87.86% | 93.5% | 73.38% | 82.23% |
| CMS-TCN | 93.83% | 87.25% | 90.42% | 94.71% | 86.99% | 90.69% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, Y.; Zhang, H.; Gong, C.; Wang, D.; Ye, M.; Jia, Y. Study of Pose Estimation Based on Spatio-Temporal Characteristics of Cow Skeleton. Agriculture 2023, 13, 1535. https://doi.org/10.3390/agriculture13081535
Wei Y, Zhang H, Gong C, Wang D, Ye M, Jia Y. Study of Pose Estimation Based on Spatio-Temporal Characteristics of Cow Skeleton. Agriculture. 2023; 13(8):1535. https://doi.org/10.3390/agriculture13081535
Chicago/Turabian StyleWei, Yongfeng, Hanmeng Zhang, Caili Gong, Dong Wang, Ming Ye, and Yupu Jia. 2023. "Study of Pose Estimation Based on Spatio-Temporal Characteristics of Cow Skeleton" Agriculture 13, no. 8: 1535. https://doi.org/10.3390/agriculture13081535
APA StyleWei, Y., Zhang, H., Gong, C., Wang, D., Ye, M., & Jia, Y. (2023). Study of Pose Estimation Based on Spatio-Temporal Characteristics of Cow Skeleton. Agriculture, 13(8), 1535. https://doi.org/10.3390/agriculture13081535