1. Introduction
Brassica rapa pekinesis, known as kimchi cabbage, is a crucial agricultural commodity in South Korea because it serves as a primary ingredient in the traditional food, kimchi. However, kimchi cabbage is susceptible to a devastating foliar disease called leaf spot disease, which can cause yield loss and render edible leaves inedible [
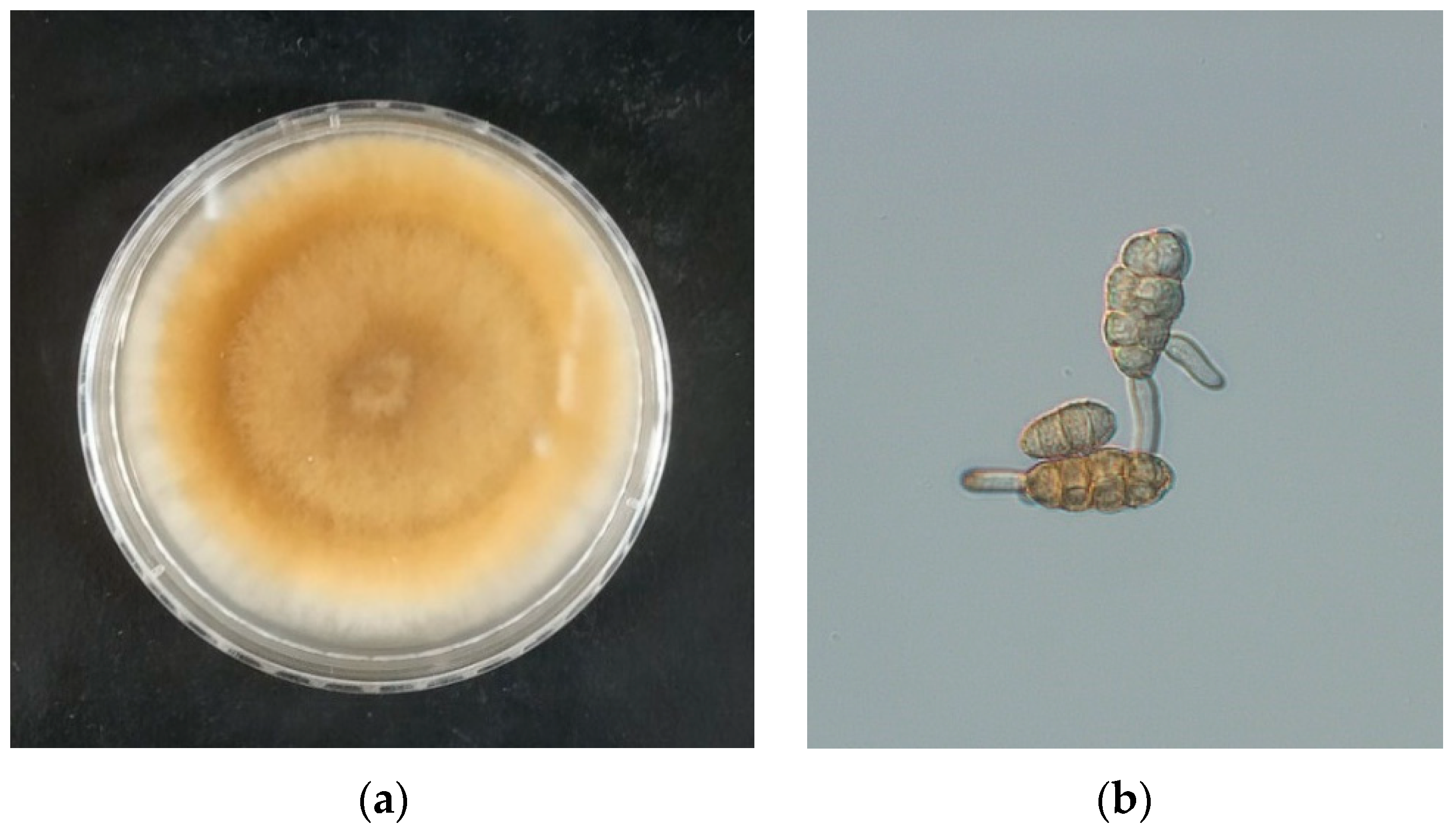
1]. Leaf spot is a common foliar disease of brassica crops caused by the fungal pathogen
Alternaria alternata. It can pose problems for brassica crops, including cabbage, cauliflower, kale, Brussels sprouts, and broccoli. Minor infections can render a crop unmarketable, whereas severe infections that lower leaf weight can result in yield loss.
Alternaria leaf spot diseases are characterized by black spots visible from both sides of the leaf. Early symptoms appear as pin-sized black specks that subsequently expand concentrically, which are surrounded by a yellow lesion. Cool temperatures between 12 and 23 °C and long periods of high relative humidity (approximately 90%) are ideal conditions for the disease’s development. The spores spread through the air or via rain splash. Plants infected by this disease are challenging to cure, as it damages the leaves. Early disease detection is crucial for preserving plant health and preventing severe leaf damage. Sensors capable of rapidly and accurately identifying early disease symptoms are highly in demand. In this regard, hyperspectral imaging methods can serve as nondestructive approaches [
1,
2].
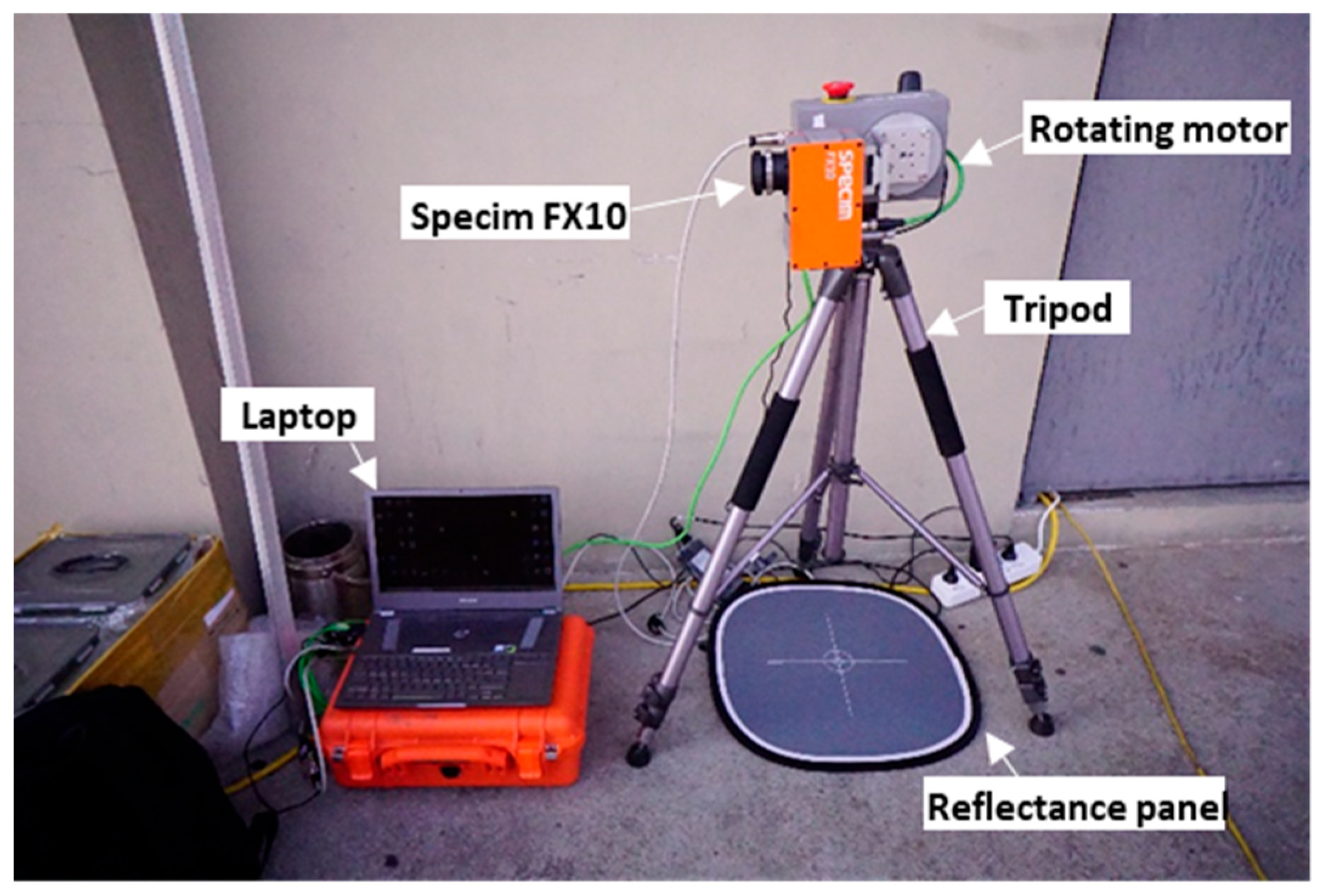
By definition, hyperspectral imaging is a technique that captures images across a wide range of light spectra. Hyperspectral cameras can capture near-infrared (NIR) spectra between 800 and 1000 nm or short-wave infrared (SWIR) spectra between 1000 and 2500 nm, whereas humans can perceive only spectra between 400 and 700 nm. This technique provides additional information beyond visible light, which can be utilized for detecting plant disease. Infecting pathogens might alter leaf tissue and its internal chemical composition, resulting in unique spectral responses that vary based on the pathogens and the host plant. Exploiting these spectral characteristics enables a more specific plant pathogen classification. The light reflected by the samples determines their internal chemical compositions; consequently, the light source and illumination are essential aspects of hyperspectral imaging. The light source must deliver sufficient intensity across the captured spectra. As most hyperspectral cameras require some time to capture samples, placing the samples and the camera on a stable structure is necessary to ensure high-quality images. Baranowski et al. (2015) [
3] observed the spectral responses of
Brassica napus in various
Alternaria genera and discovered that the most effective separation between uninfected and infected areas is observed in the SWIR range and the water-absorption bands (1470 and 1900 nm). Song et al. (2022) [
4] used hyperspectral imaging to classify soft rot disease in napa cabbage and discovered that the most effective wavelengths for distinguishing rot-disease-infected napa cabbages from healthy ones are 970, 980, 1180, 1070, 1120, and 978 nm. Hyperspectral data contain numerous variables that align well with machine learning approaches.
Machine learning is a method for analyzing and learning patterns within datasets, generating a generalized model for these datasets. Unlike a hand-coded classifier, the machine learning method can create a model that learns and predicts based on the trained dataset. Mahlein et al. (2012) [
5] examined a hyperspectral analysis of symptoms caused by different sugar beet diseases and identified a relationship between the development stage of the disease and its spectral reflectance. By combining the spectral angle mapper with spectral reflectance, they classified diseases into zones displaying symptoms ranging from young to mature. Utilizing a hyperspectral imaging system has provided a better understanding of leaf reflectance changes through the pixel-wise extraction of spectral signatures. This technology substantially enhanced the sensitivity and specificity of hyperspectrometry in the proximal sensing of plant diseases. Hyperspectral images excel in incorporating spectral and spatial dimensions. This incorporation enables the accurate classification of specific areas by analyzing the image texture and spectral signature. With the advancement of computational technology and data science, machine learning has evolved to handle complex patterns and larger datasets.
A convolutional neural network (CNN) is a branch of machine learning that takes images as input and learns to identify patterns within their spatial dimensions. CNNs are constructed with a series of convolutional layers that act as feature extractors, followed by fully connected layers at the end of the network that serve as classifiers. They are renowned for their high performance and robustness in solving image classification problems. In a study by Reya et al. (2023) [
6], a deep-learning approach was employed for cabbage disease classification. State-of-the-art CNN architectures, including VGG16, VGG19, MobilNetV2, and InceptionV3, were utilized along with the transfer learning technique to determine the optimal solution. Among these models, VGG16 exhibited the highest accuracy of 95.55%, surpassing the others. However, research has yet to explore using CNNs based on hyperspectral images to detect leaf spots in kimchi cabbage.
Therefore, this study aims to bridge the gap between advanced perceptual sensors and data science to address the lack of adequate and nondestructive methods for detecting leaf spot disease. Consequently, this study aims to identify the spectral signature of Alternaria leaf spot disease and employ machine learning and CNN models to automatically classify leaf spot disease. Lastly, these models will be compared and analyzed to determine the optimal solution for the problem.
4. Discussion
4.1. The Progress of Diseased Symptoms from Early to Late Stages
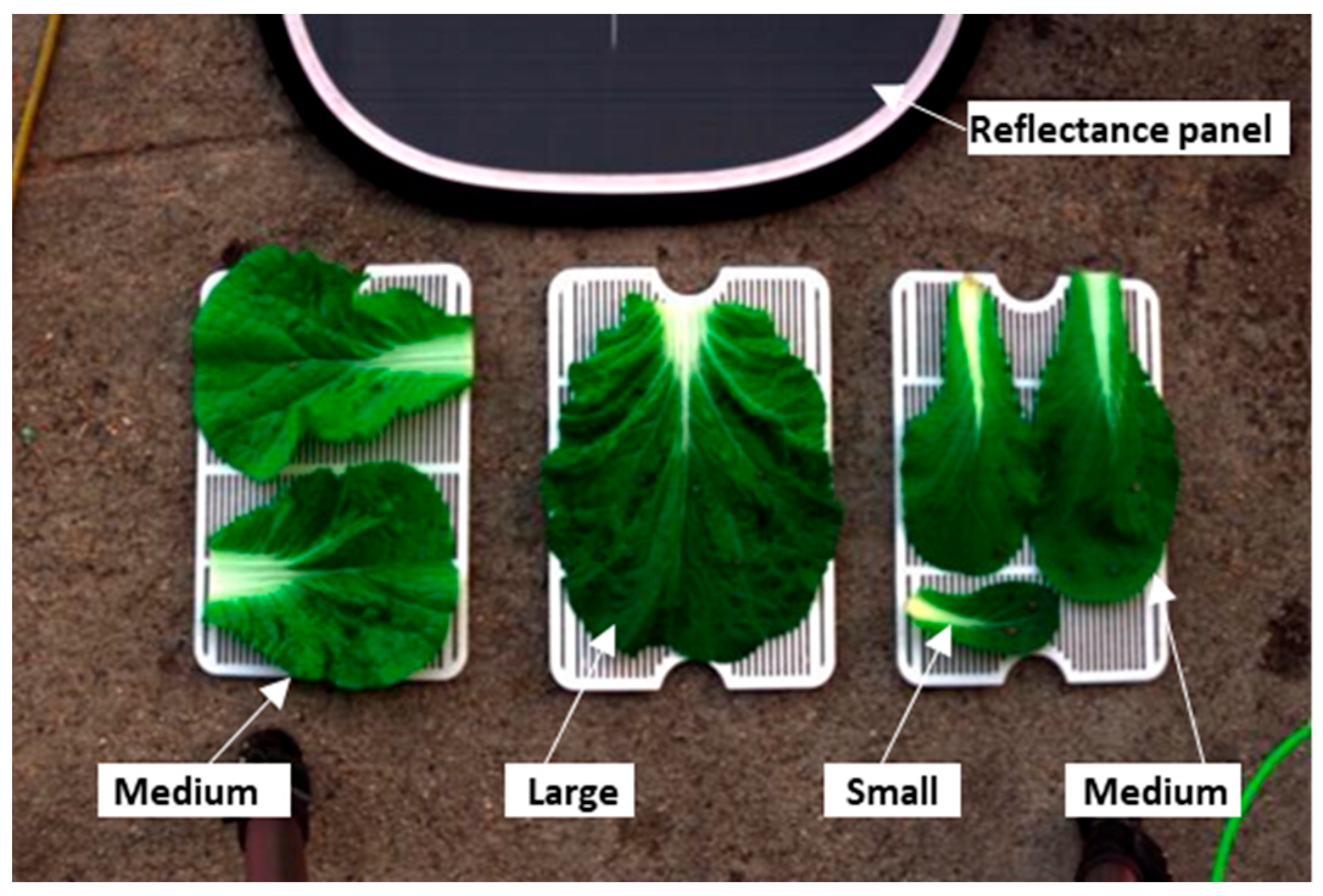
Data acquisitions were conducted outdoors using the sun as the light source. This methodology resulted in a slightly different spectral radiation in each hyperspectral image due to the subtle movement of the sun and atmospheric conditions during data acquisition. However, the reflectance panel could compensate for these slight differences through radiometric calibration. Close-range hyperspectral capturing enabled a clear distinction between background, healthy, and diseased areas in the image. The spatial resolution was high enough to capture small disease spots within numerous pixels, including a thin layer of early symptoms between mature symptoms and healthy leaves within the width of a few pixels. These results align with Mahlein et al. (2012) [
5], where the pixel-wise mapping of spectral reflectance in the visible and NIR ranges enabled the detection and detailed description of diseased tissue at the leaf level. Leaf structure was correlated with leaf spectral reflectance patterns.
4.2. Black Spot Spectrum Signature
When pathogens attack plants, they develop necrotic lesions as a response [
12,
13]. Mmbaga et al. (2011) [
14] described Alternaria species infections as a circular-shaped necrosis surrounded by an uninvaded chlorotic halo. Like many fungal pathogens,
Alternaria alternata produces cell-wall-degrading enzymes. These secondary metabolites can degrade cellulose, hemicellulose, and pectin, which are components of cell walls. The degradation of cell walls due to disease diffusion into leaf tissues changes leaf structures and pigments. The breakdown of leaf structure causes spectral changes in the NIR region, where the leaves cannot properly reflect NIR light, as observed in the mature symptoms. Moreover, early symptoms, which occur around the mature symptoms, are characterized by a decline in chlorophyll in the leaf tissues, referred to as chlorosis. This change mainly affects the visible spectral region, where the leaves absorb less and reflect more electromagnetic energy to the sensor [
15].
In line with the study conducted by Zahir et al. (2023) [
16], plant stress, including that caused by pathogens, manifests in its spectral characteristics. The visible spectrum provides information on chlorophyll content, while the NIR spectrum corresponds to the water and structural condition of the leaves. Various findings have suggested the feasibility of using spectral analysis for the rapid and nondestructive monitoring of plant conditions. Current methods, which involve expert and molecular analysis, are time-consuming, laborious, and involve complex procedures. This underscores the advantages of nondestructive methods, as they require no sample preparation and eliminate the need for repetitive processes in measurement. Furthermore, nondestructive methods open up the possibility of the early detection of plant diseases and enable the fast handling of these diseases [
17].
4.3. Performance Comparison between the Models
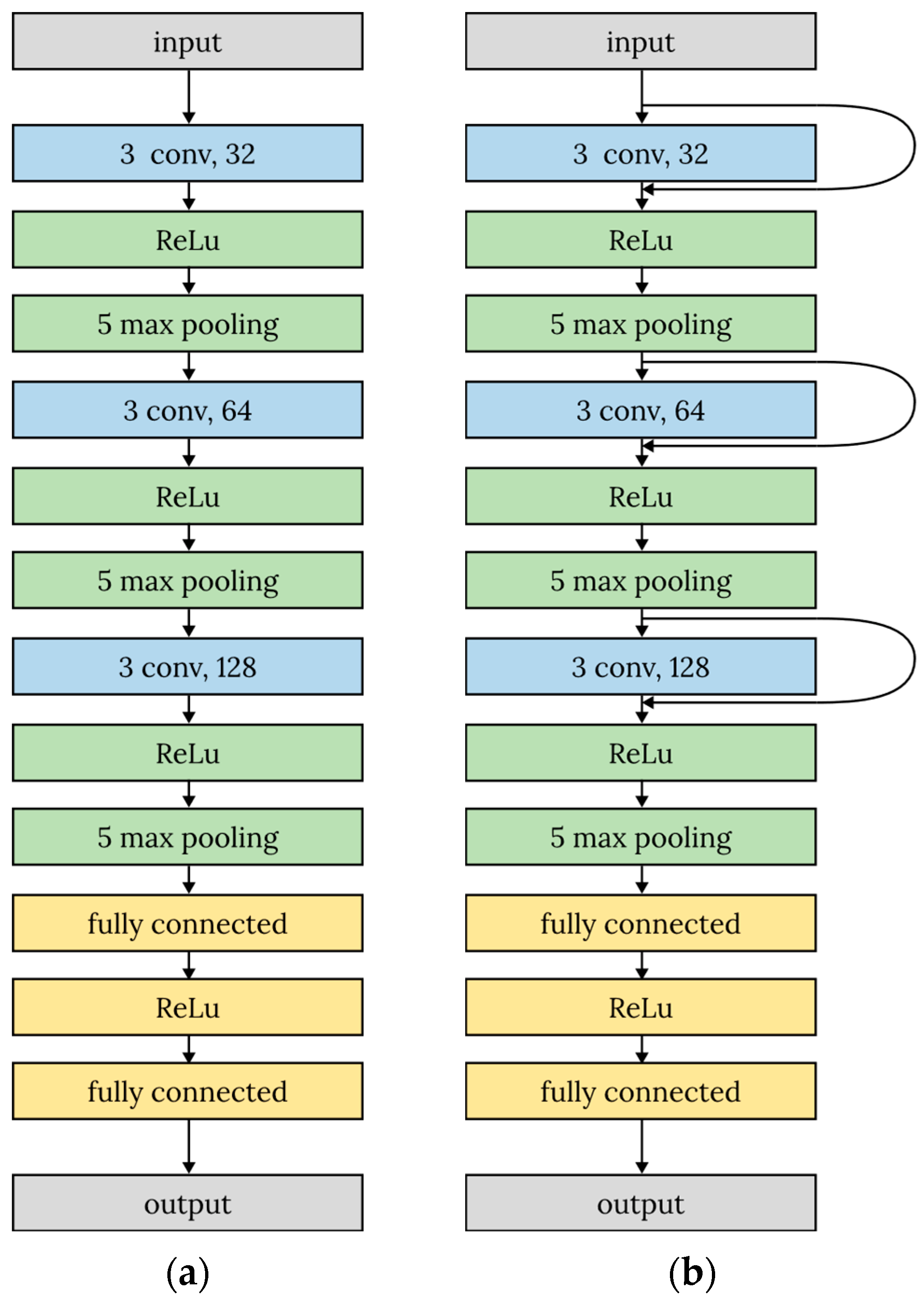
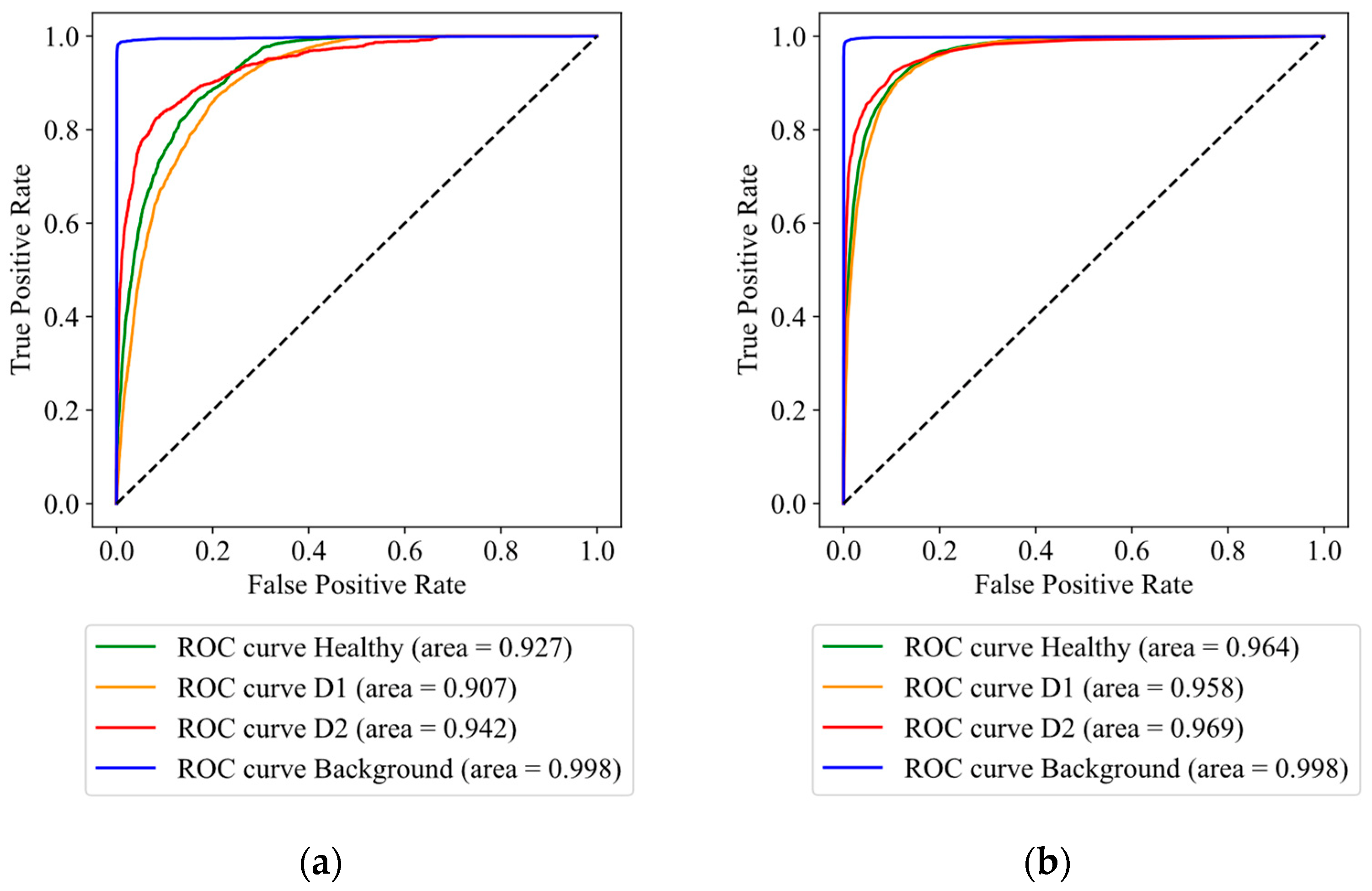
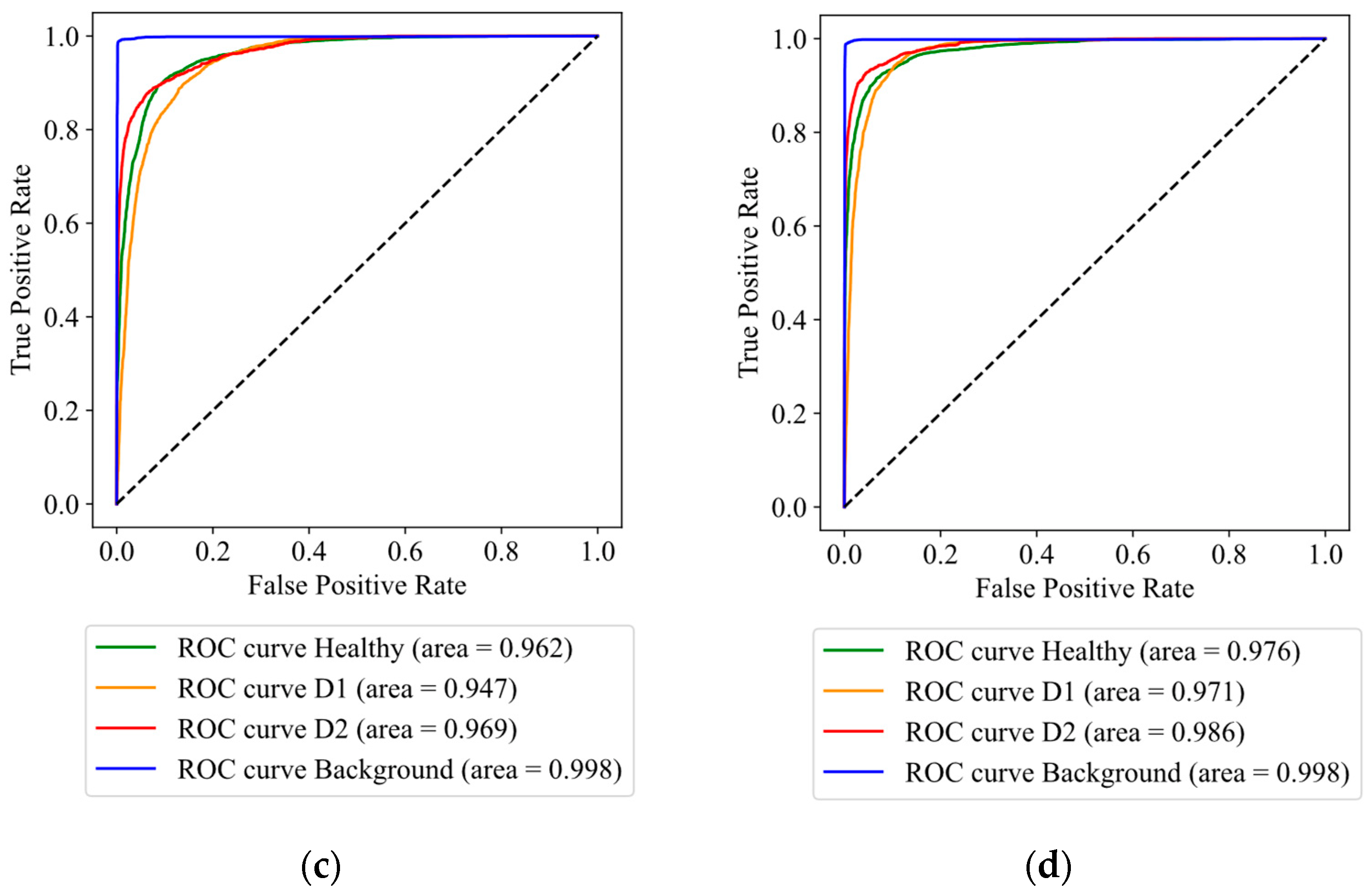
Based on the model evaluation results, 1D-ResNet demonstrates the highest performance among the models. Compared to 1D-CNN, 1D-ResNet has a more complex architecture due to the presence of shortcut connections. These connections provide a direct link to the previous layer, bypassing the convolutional layers. Firstly, the shortcut connections serve as identity mappings, enhancing the efficiency of the learning process. Secondly, they act as regulators, promoting better generalization and enabling high performance in predicting unseen data. This is evident in the high f1-score and balanced accuracies across the four classes: healthy, background, early, and mature symptoms.
In the second place is RF. RF clearly outperformed SVM and has slightly higher overall accuracy compared to the 1D-CNN. RF is an ensemble model consisting of numerous decision tree models. It randomly selects features for each tree, reducing the correlation between trees [
18]. RF eliminates unrelated features with low contribution, allowing it to handle complex, high-dimensional data without overfitting [
19]. Furthermore, since feature selection is built into the model, only a few parameters must be adjusted; even using default parameters is sufficient to generate a high-performance model. Considering the computational cost, the 1D-CNN and 1D-ResNet models have a smaller model size, resulting in faster inference speed. This can be advantageous, particularly in real-time applications where quick and accurate predictions are essential.
Lastly, SVM lacks sensitivity compared to the RF and 1D-CNN models. The SVM algorithm is unsuited for large datasets, especially in noisy scenarios like overlapping target classes. SVM is most effective in cases where a clear margin of separation between classes exists, and it excels in high-dimensional spaces, particularly when the number of dimensions is larger than the number of samples [
20].
4.4. Performance Comparison between the Models and Limitations
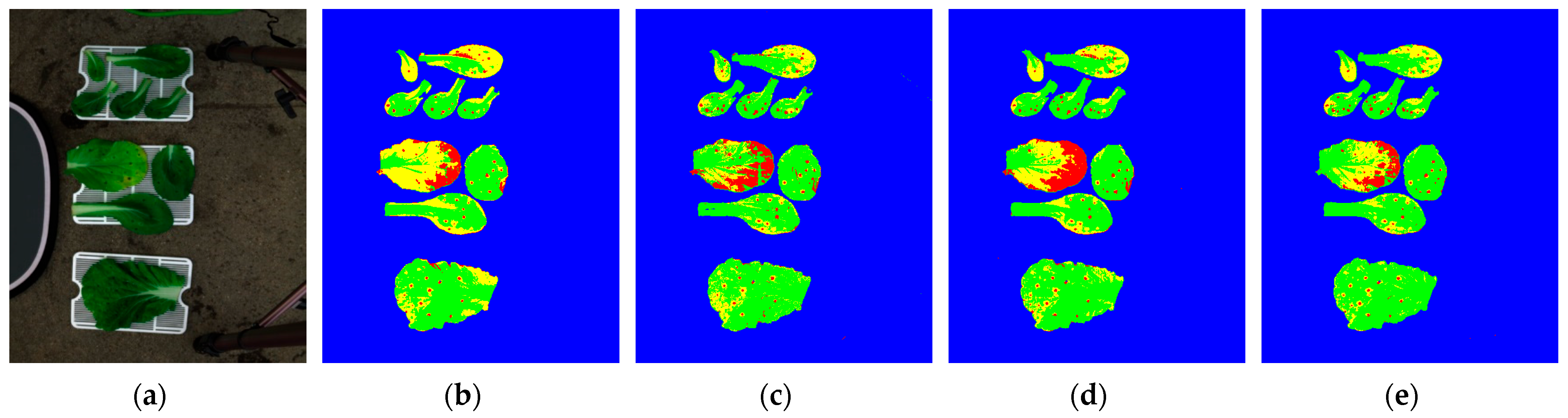
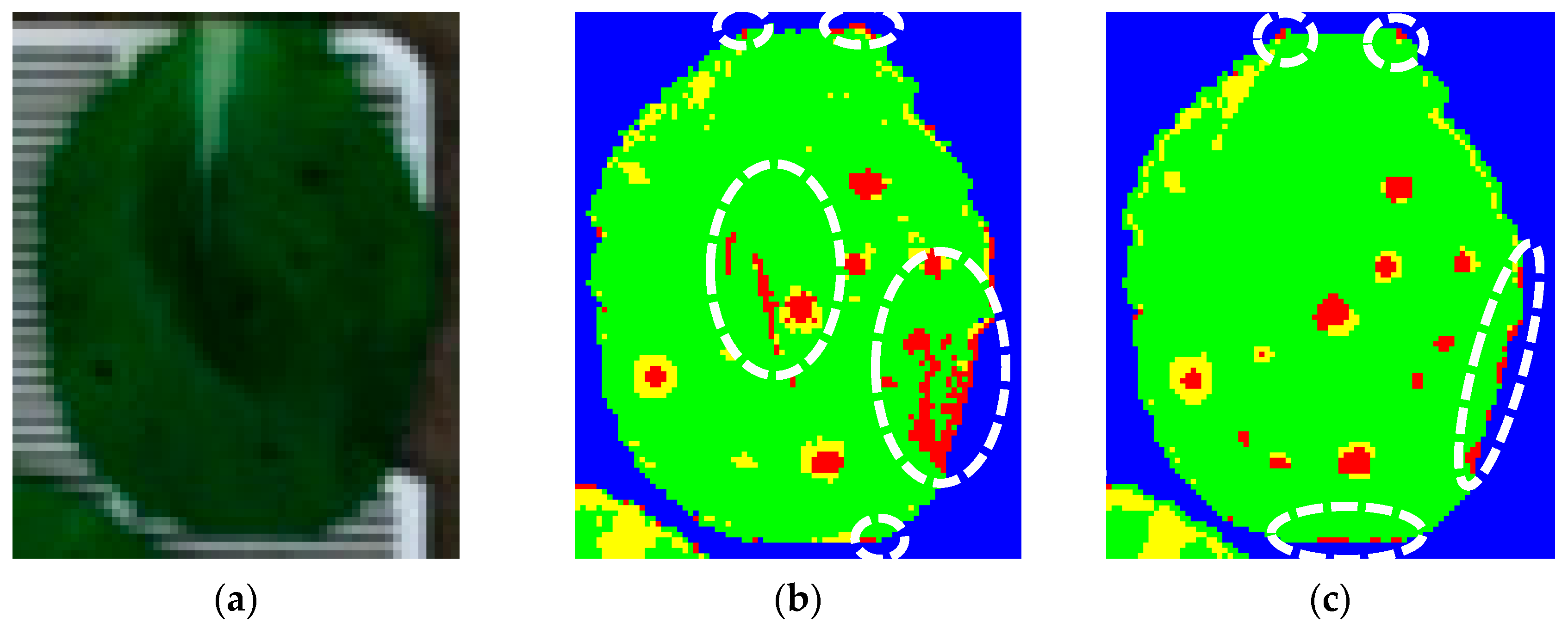
Based on the validation results, all models exhibited a high sensitivity, detecting mature and early disease symptoms. Additionally, they successfully segmented different areas on the leaves, providing new insights into the data. The models could learn features for each class based on pixel-based data. However, some misclassifications occurred in certain areas. In
Figure 14, the misclassifications are indicated in white circles. Dark-colored leaf areas were incorrectly detected as necrotic diseases, even though leaf shadows caused them. This misclassification resulted from the spectral profile in those areas resembling the diseased areas. However, 1D-ResNet appears to handle the shadow problem more effectively, as illustrated in
Figure 14c, where the dark area in the middle of the leaf is classified as being healthy. Only some points around the leaf are misclassified as matured diseases. These limitations of pixel-wise classification could be addressed by considering the corresponding pixel and its neighboring pixels.
By incorporating spatial information, the model’s robustness to noise can be enhanced. Instead of relying solely on the spectral characteristics of individual pixels, one can consider and utilize the spectral characteristics of neighboring pixels as part of the dataset. To accommodate the spatial information present in the dataset, modifications are required in the model. Introducing additional axes that convolve in the spatial direction can be a viable approach for calculating spectral–spatial information. The utilization of novel techniques, such as three-dimensional CNNs, facilitates the efficient calculation of spectral–spatial information, potentially leading to increased detection accuracies and an improved robustness to noise. Shi et al. (2021) [
21] developed a novel CropdocNet where spectral information was initially processed, followed by the processing of spectral–spatial relations in the subsequent layer. This model achieved an impressive accuracy of 98.09% in detecting potato late blight disease.
However, the use of a hyperspectral camera presents operational complexities, rendering it impractical for in-field applications. Furthermore, the lengthy data processing and high dimensionality contribute to slow preprocessing. Hyperspectral cameras are sensitive to illumination changes and require a setup with known reflectance. In the context of detecting visible diseases, an RGB camera might outperform a hyperspectral camera due to its simpler operation and higher spatial resolution, allowing for a more effective capture of textural information. Consequently, hyperspectral camera technologies could find greater utility in focusing on asymptomatic diseases to demonstrate their superiority.
4.5. Practical Implications
Detecting infected plants early is crucial for optimal disease management. Early identification allows for specific interventions, such as the removal of infected plants, the application of targeted pest protection measures, and the planting of resistant species [
2]. Precise early disease treatment can reduce plant damage and improve cost-effectiveness in terms of operation, benefiting farmers and the agricultural industry as a whole. To realize this idea, an integration of multidisciplinary research and the utilization of multiple technologies is required. However, the first key step toward achieving that goal is to initially sense the diseases. The development of a nondestructive evaluation using hyperspectral technology makes the study of specific spectral pathogen characteristics highly important. This study can serve as a pioneer, investigating the spectral characteristics of
Alternaria alternata on kimchi cabbage. It allows subsequent studies to understand these features and build classifier models for automatic detection.
5. Conclusions and Future Work
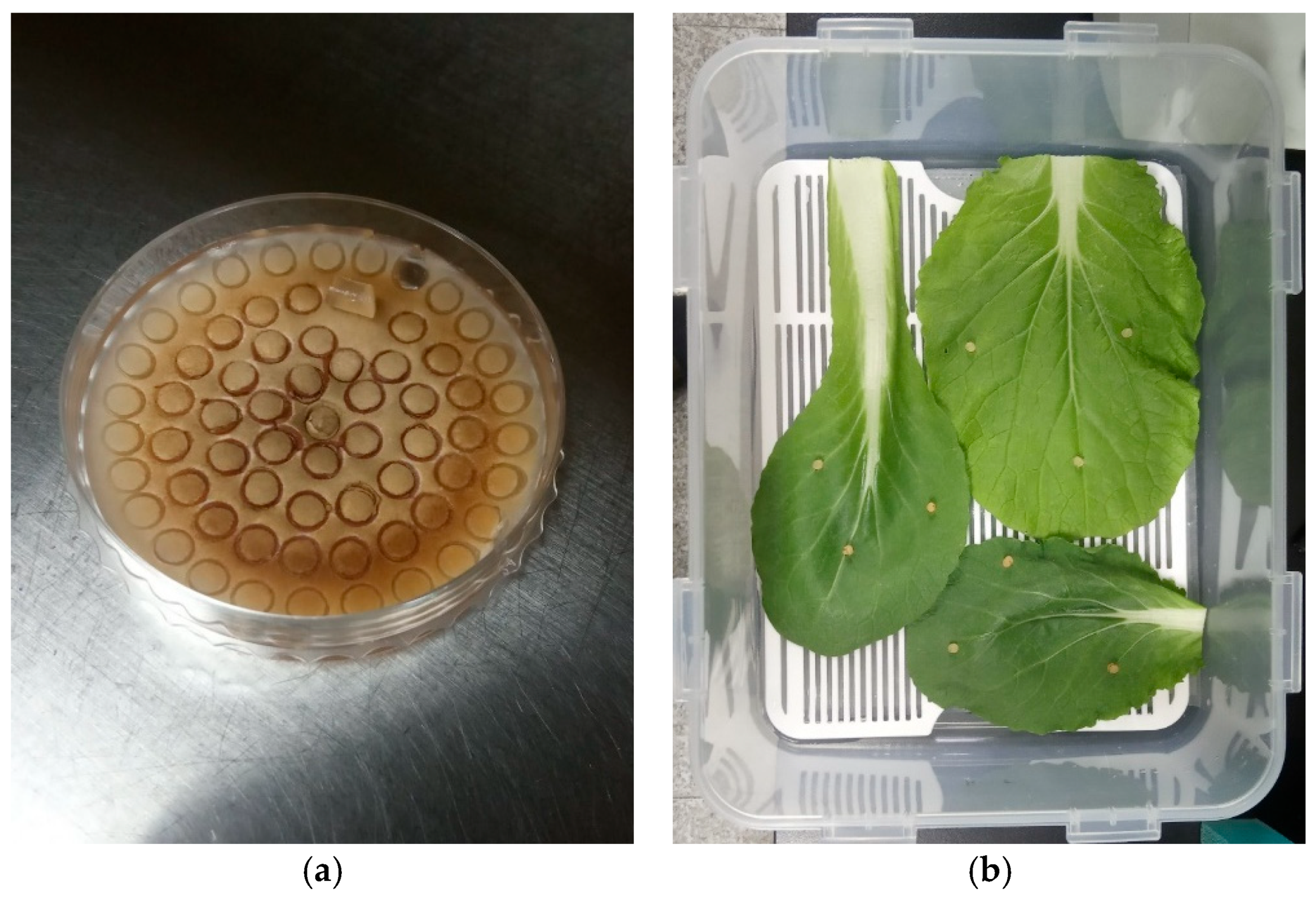
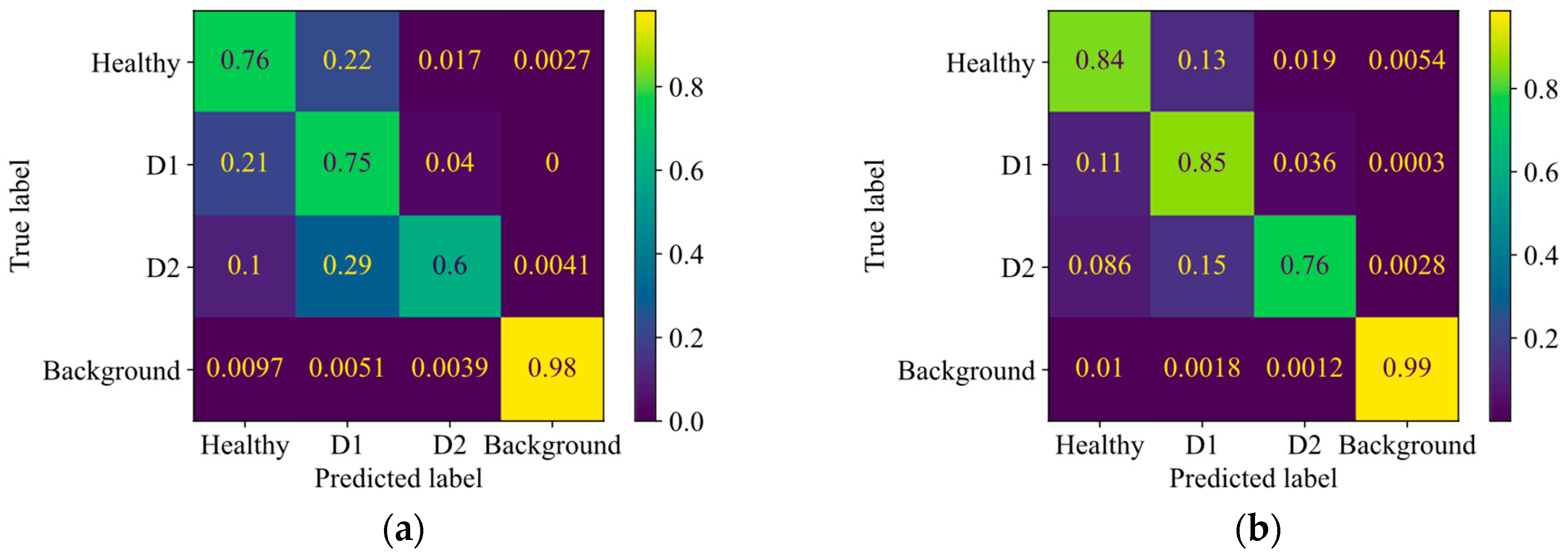
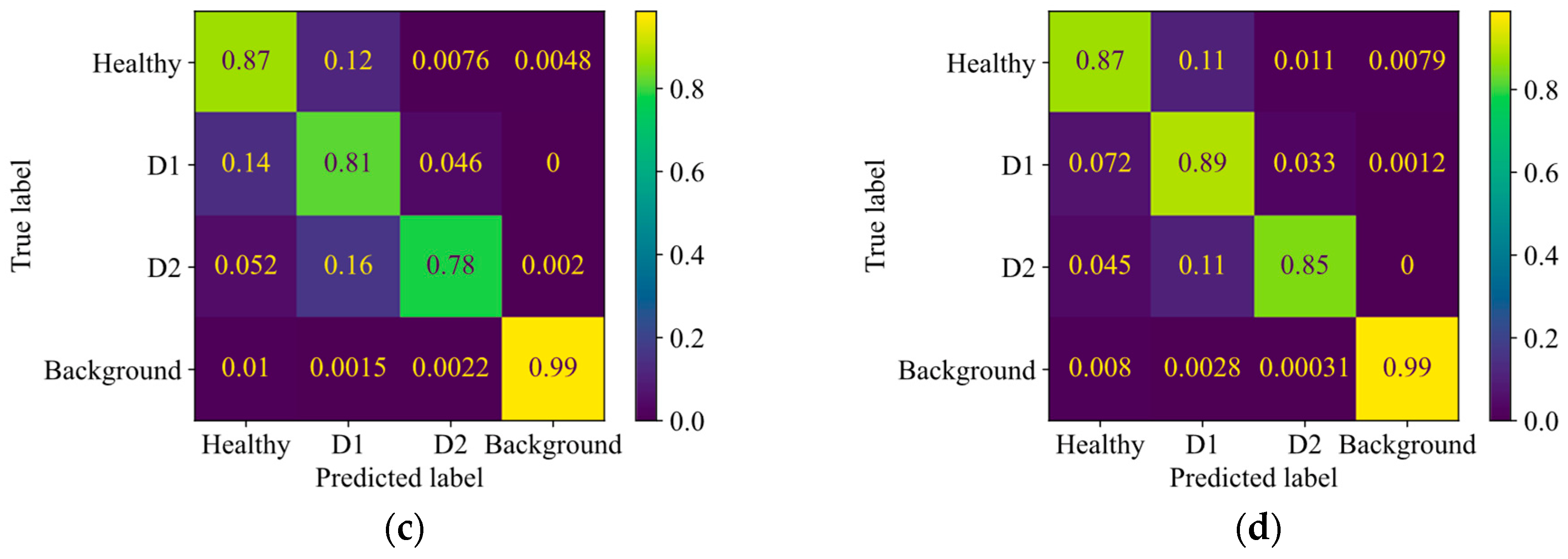
This study identified the symptoms and spectral characteristics of Alternaria alternata infection in kimchi cabbage leaves. Alternaria alternata was incubated and inoculated on different-sized kimchi cabbage leaves. The inoculated leaf samples were stored in humid containers, and disease development was observed daily using hyperspectral imagery. The mature symptoms of Alternaria alternata were recognized by the development of black spots on the leaf surface, whereas early symptoms are the yellow areas around the black spot. Mature symptoms caused the breakdown of leaf tissues, ceasing their function and resulting in a low reflectance in the NIR spectrum. Early symptoms caused a reduction in chlorophyll content in the infected tissues, forming a yellow ring around the black spots with a higher visible and red-edge reflectance than in healthy areas. Four different classifier models (SVM, RF, 1D-CNN, and 1D-ResNet) were trained to classify the hyperspectral images into four different classes: background, mature, early, and healthy. 1D-ResNet demonstrated the best performance with an overall accuracy of 0.91, compared with RF, 1D-CNN, and SVM, which achieved 0.88, 0.86, and 0.80, respectively.
This study lays the foundation for future work on high-throughput disease detection using drones and aerial imagery. Additionally, there is ample room for further enhancing the 1D-CNN model by improving its architecture to boost its performance. Nowadays, drones come in various sizes and can be equipped with various payloads, including hyperspectral sensors. With prior knowledge of the spectral characteristics of Alternaria disease and a preliminary model, a new model suitable for field applications can be developed. This study is considered ideal due to the high resolution and flat leaf arrangement, allowing for clear images and distinctions between classes. However, field applications pose additional challenges, such as lower resolution and various leaf positions that may obscure diseases. Furthermore, adjusting the model by employing a more complex structure might be necessary.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}