
Design of Cotton Recovery Device and Operation Parameters Optimization

Abstract
:1. Introduction
2. Materials and Methods
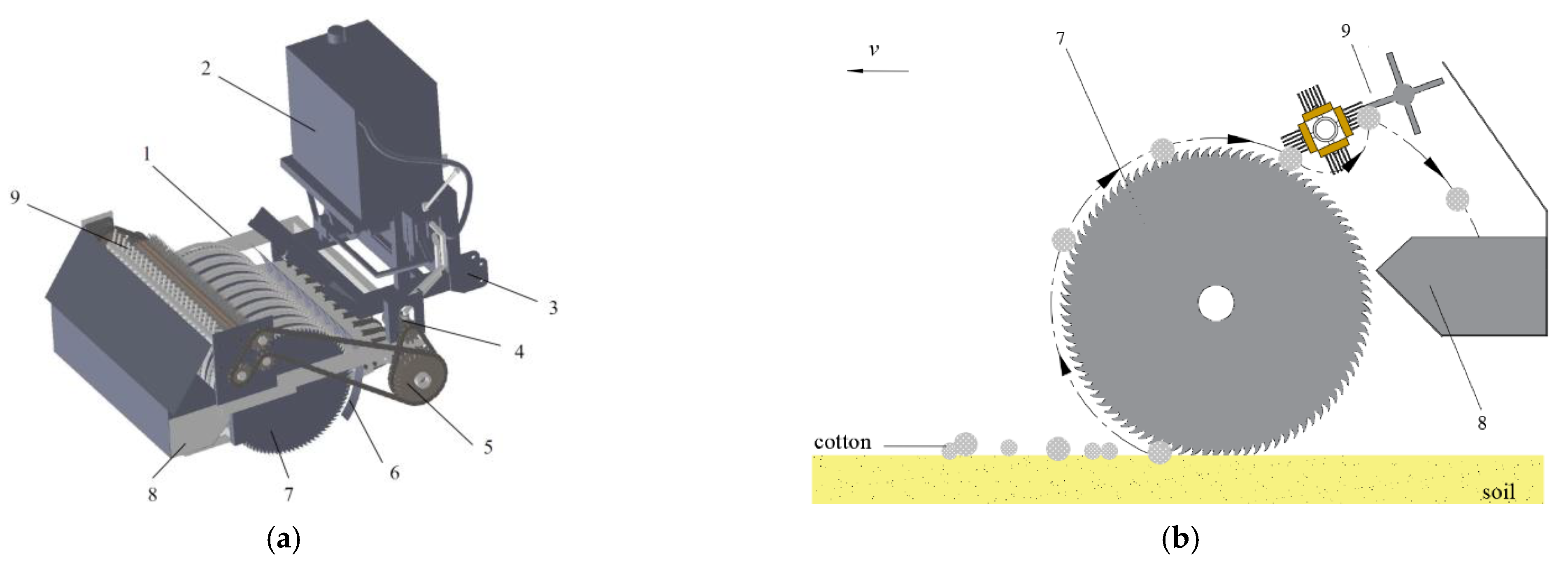
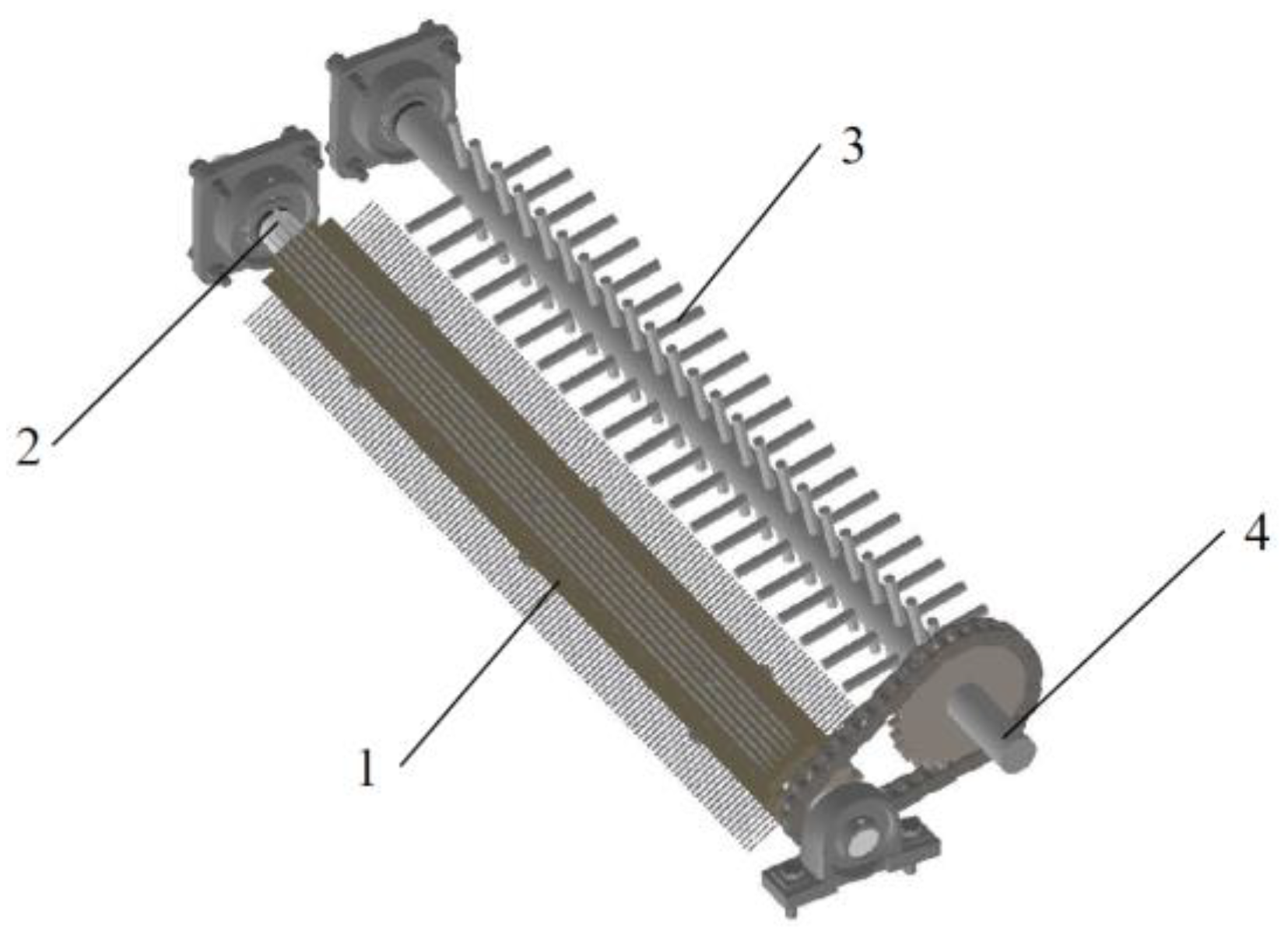
2.1. Structure and Operating Principle of the Cotton Recovery Device
2.2. Design and Analysis of the Major Components
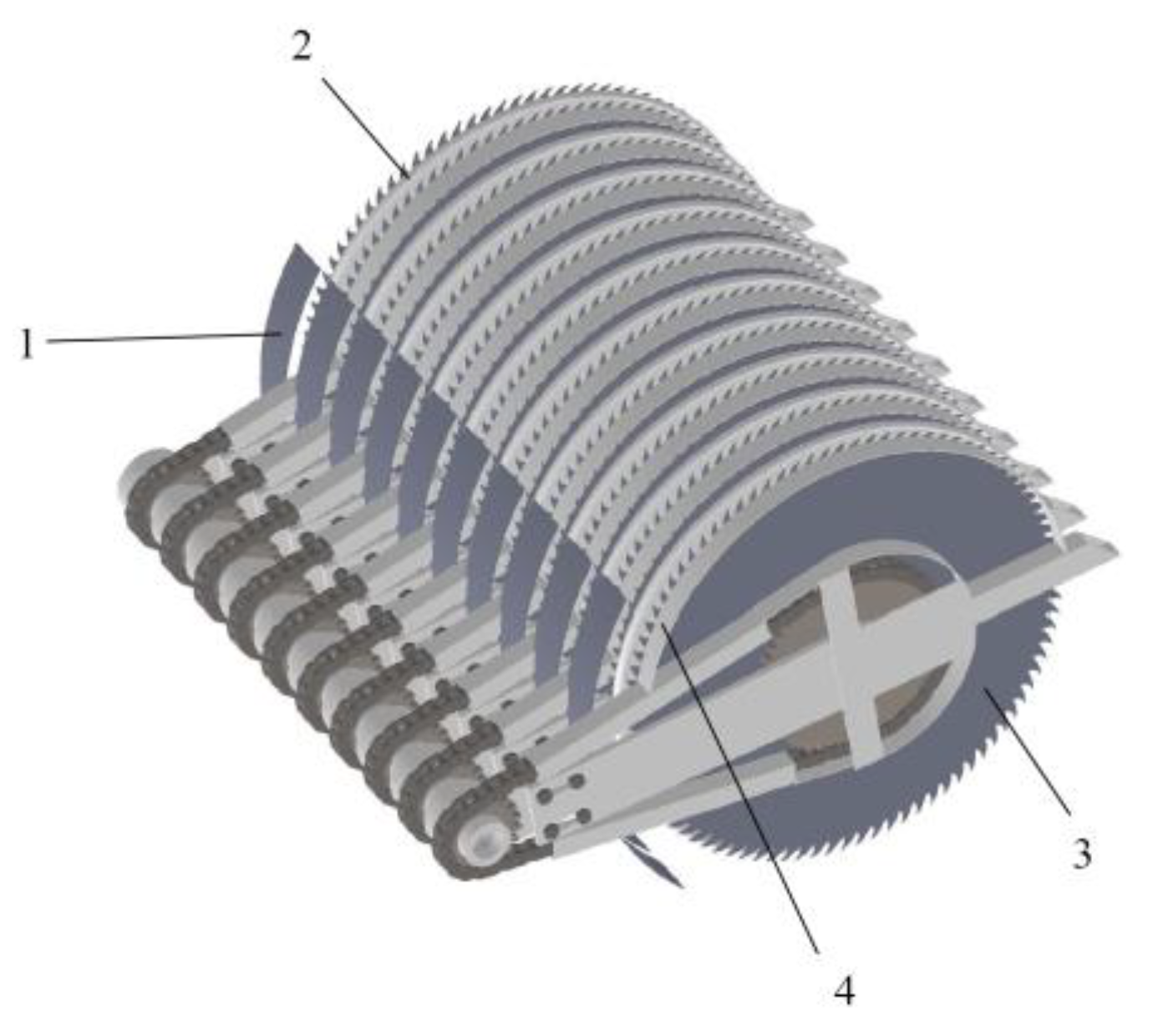
2.2.1. Design of the Sawtooth Roll-Tie-Type Cotton-Picking Mechanism
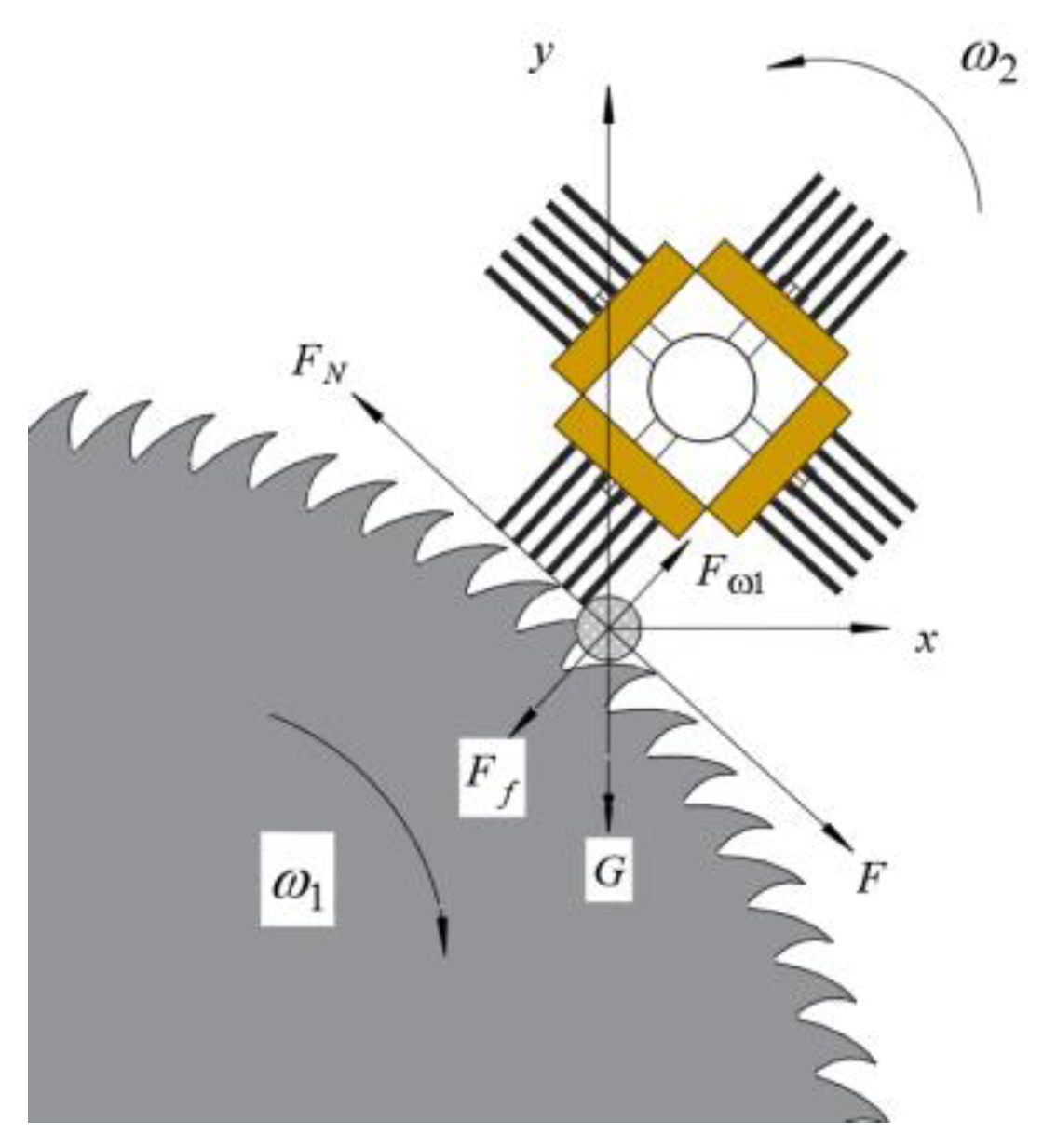
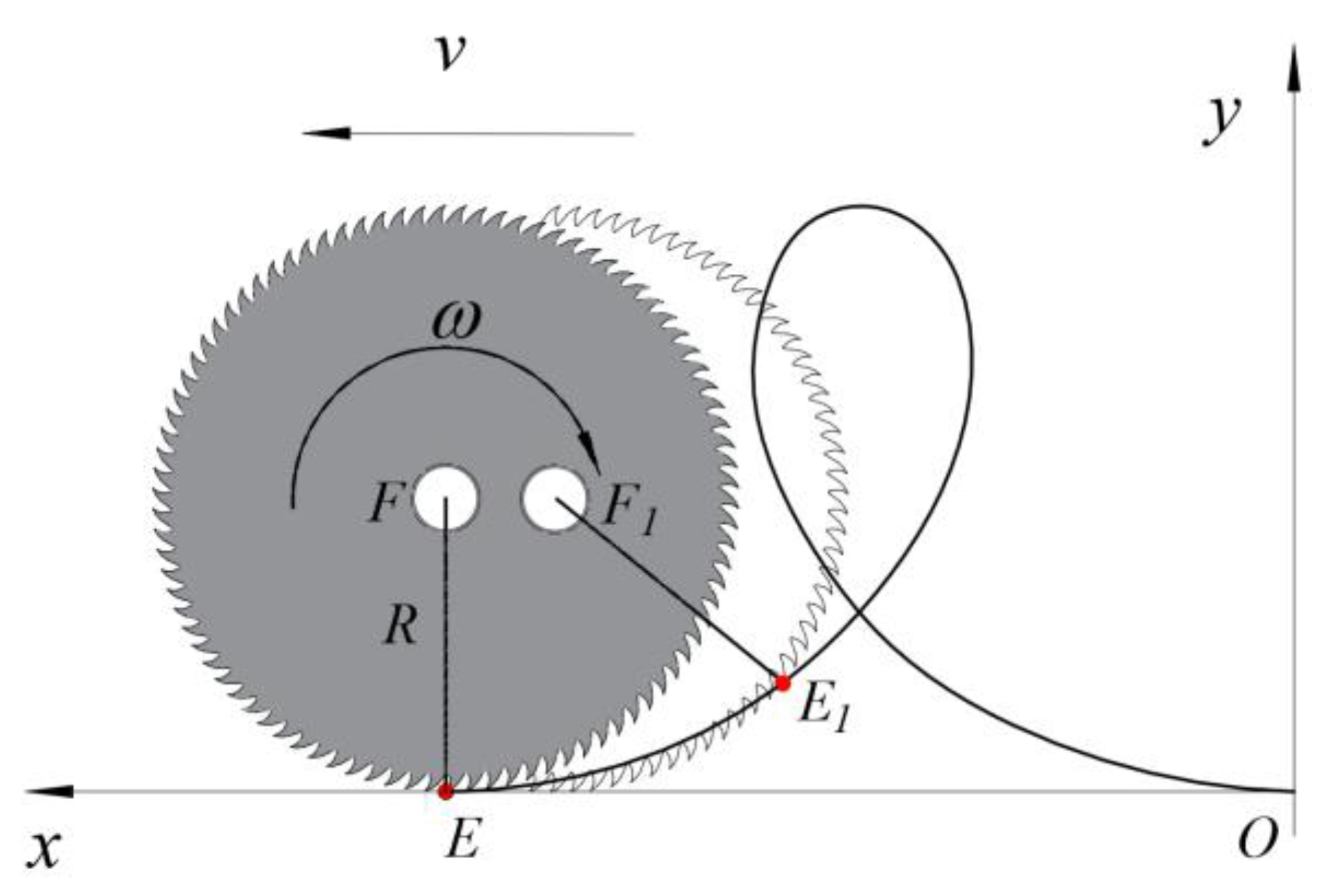
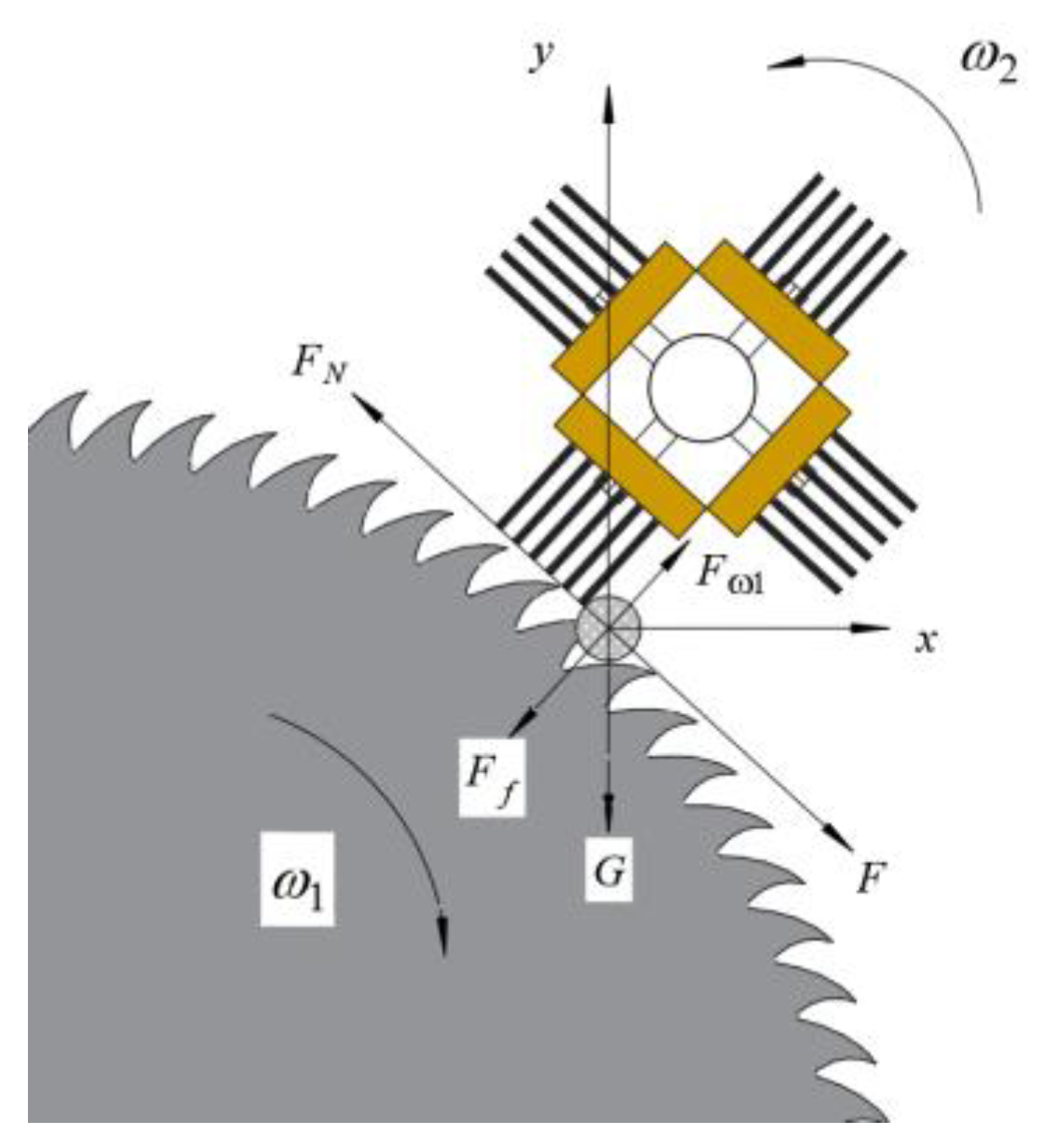
2.2.2. Analysis of the Motion Characteristics of the Serrated Disc
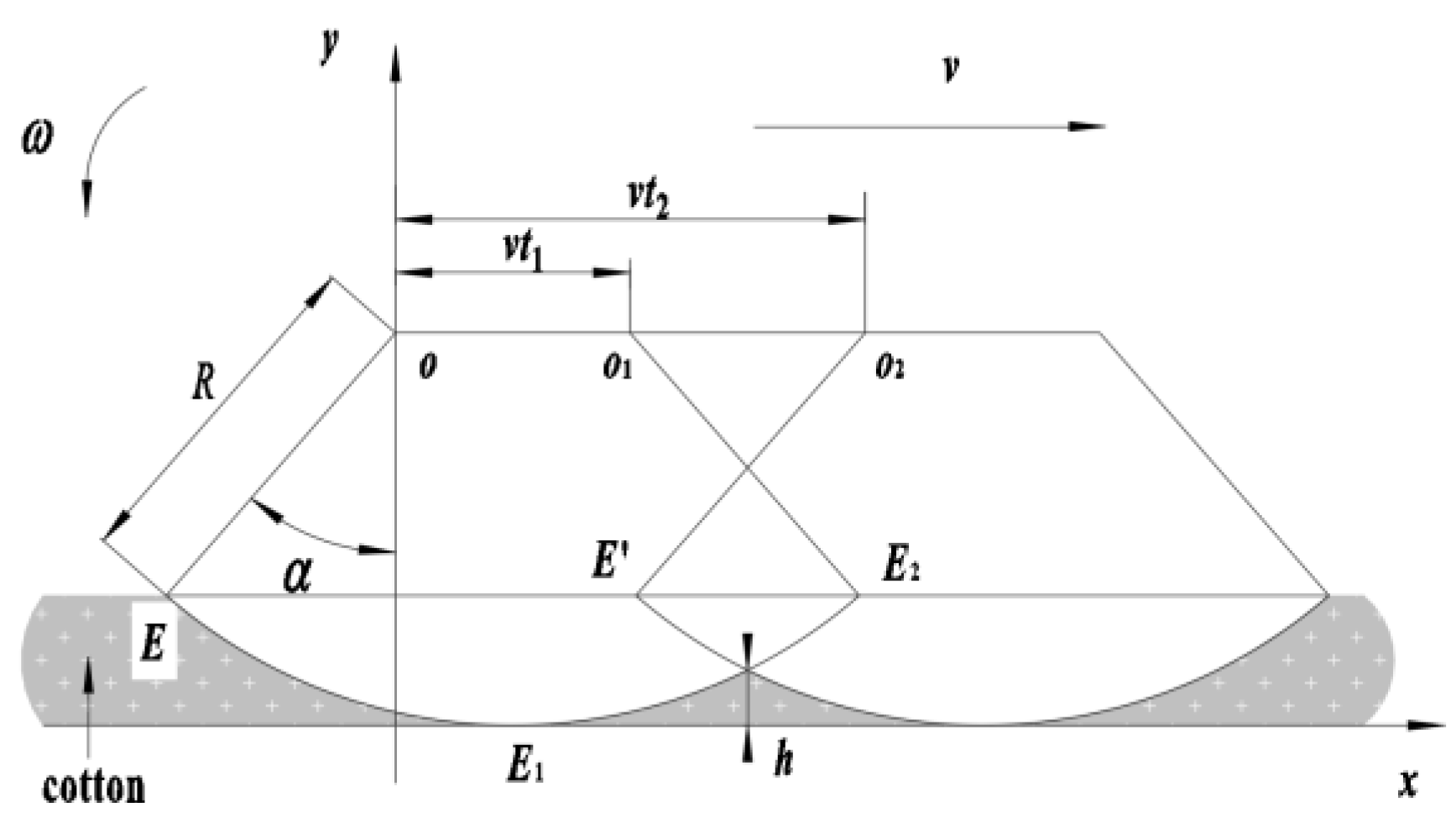
2.2.3. Analysis of the Conditions of Flooring Cotton without Missing Pickup
2.3. Design of the Cotton Unloading Mechanism
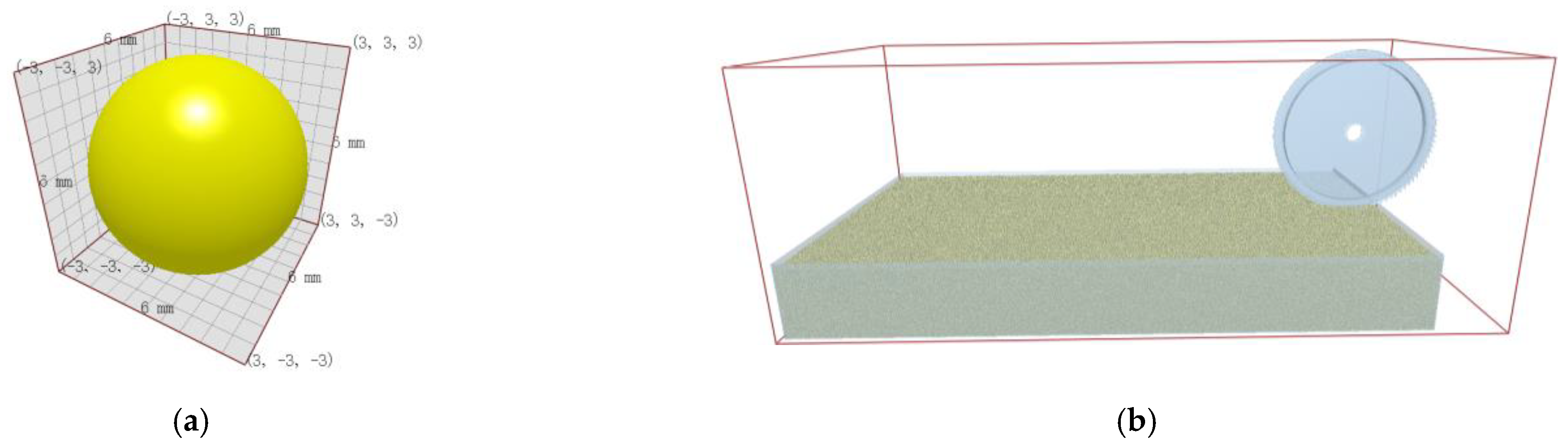
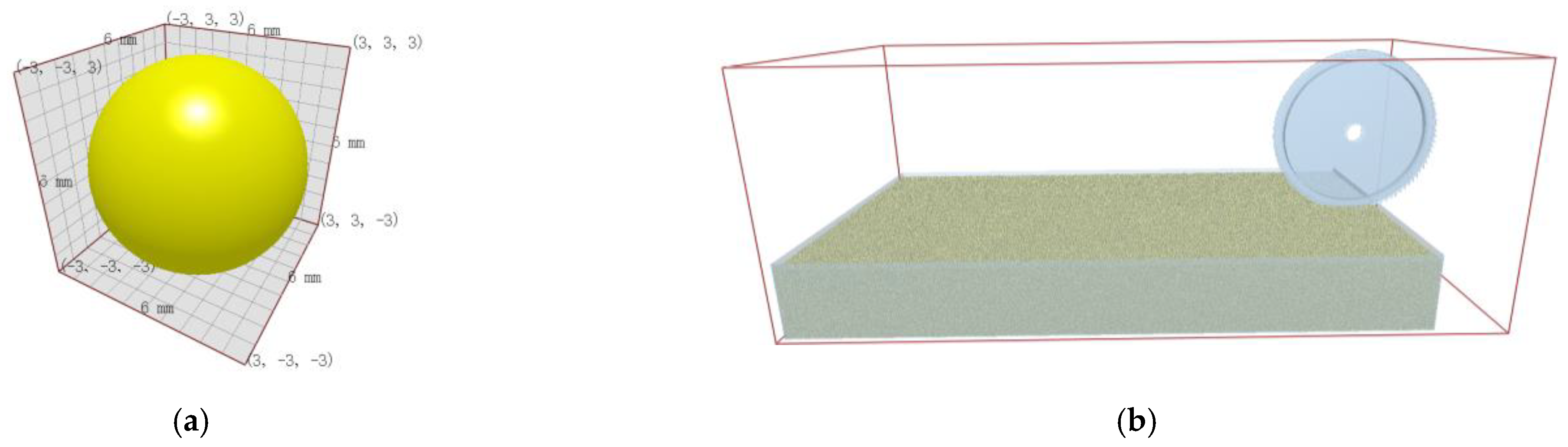
2.4. Discrete Element Modeling of the Motion Process of the Cotton-Picking Mechanism
2.4.1. Modeling and Parameter Setting of the Simulation Model
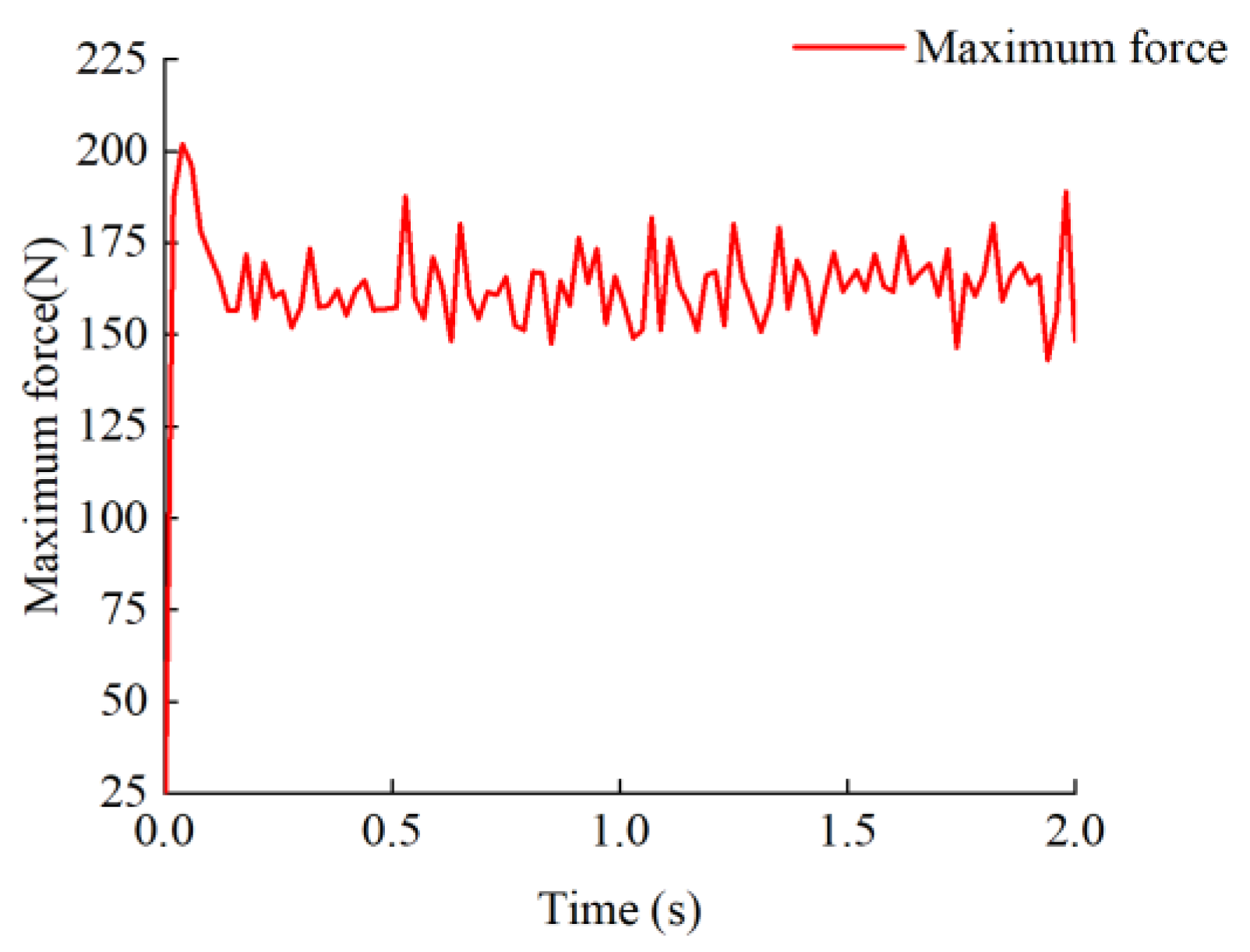
2.4.2. Analysis of Simulation Results
2.5. Test Materials
2.6. Test Methods
2.7. Test Results
3. Results and Discussion
- (1)
- Establishment of the regression equation and significance analysis of the picking rate
- (2)
- Establishment of the regression equation and significance analysis of the impurity rate
3.1. Response Surface Analysis
- (1)
- Analysis of the influence of the picking rate
- (2)
- Analysis of the influence of the impurity rate
3.2. Parameter Optimization and Test Validation
4. Conclusions
- For cotton machine harvesting in Xinjiang, there was no suitable mechanism to recover cotton fallen on the ground. In this study, a sawtooth-type recovery device was designed to recover cotton fallen on the ground and efficiently unload it. The device consists of a sawtooth roll-tie-type cotton-picking mechanism, cotton unloading mechanism, cotton collection box, and other parts. The primary design parameters were determined using the analysis of the motion of the serrated discs, the cotton non-missing picking condition, and the cotton unloading condition.
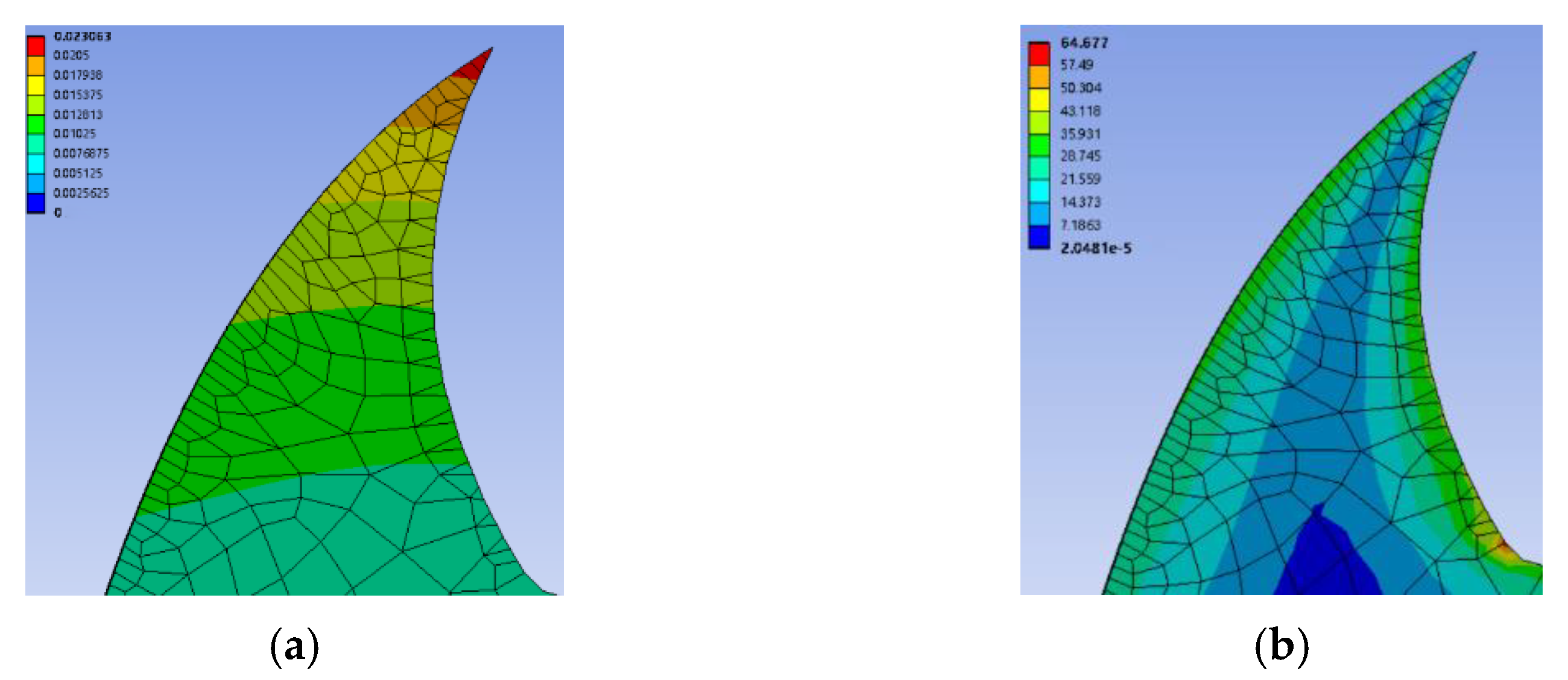
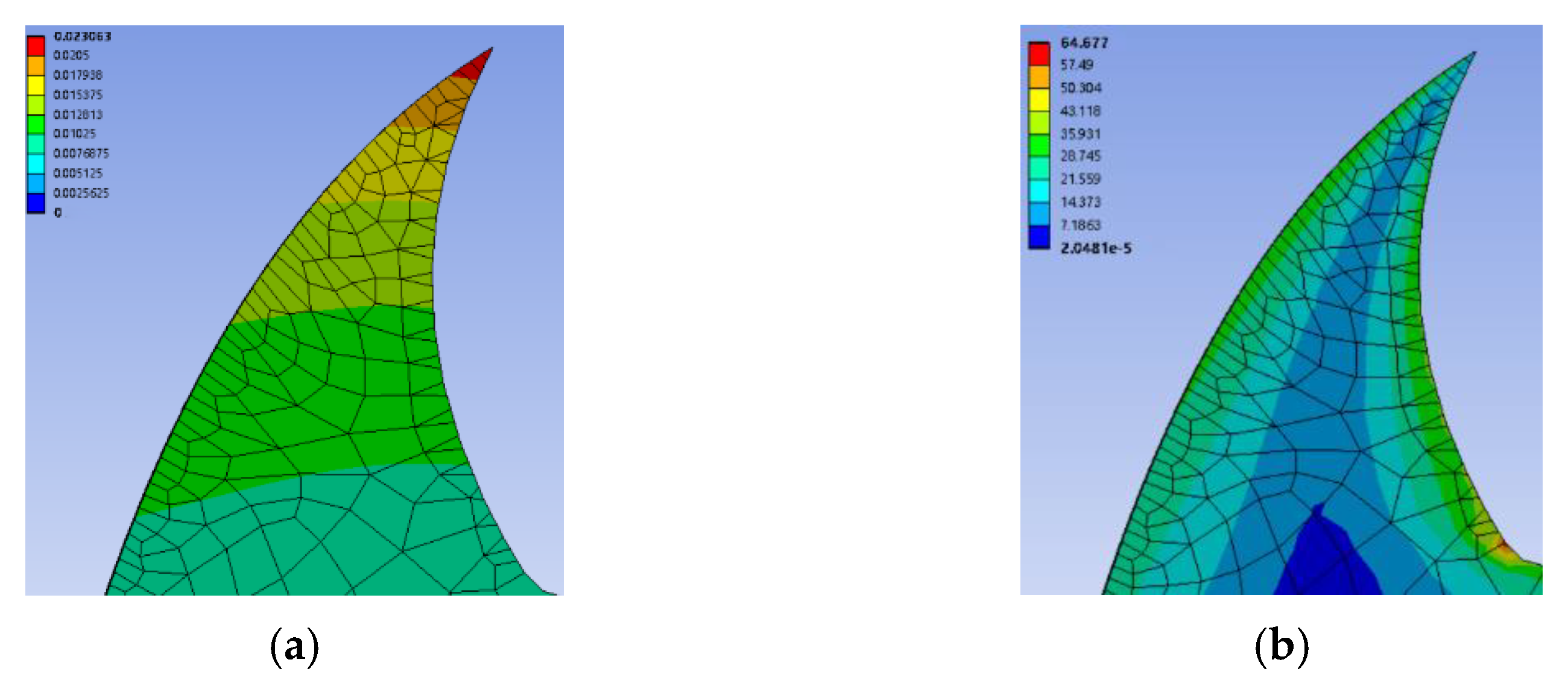
- EDEM simulated the process of the cotton-picking mechanism movement. The maximum force on the tooth end of the serrated teeth was obtained during the working process. Then, ANSYS analysis of strain and stress on the tooth end of the serrated teeth was carried out to verify that the structural strength of the serrated disc meets the design requirements.
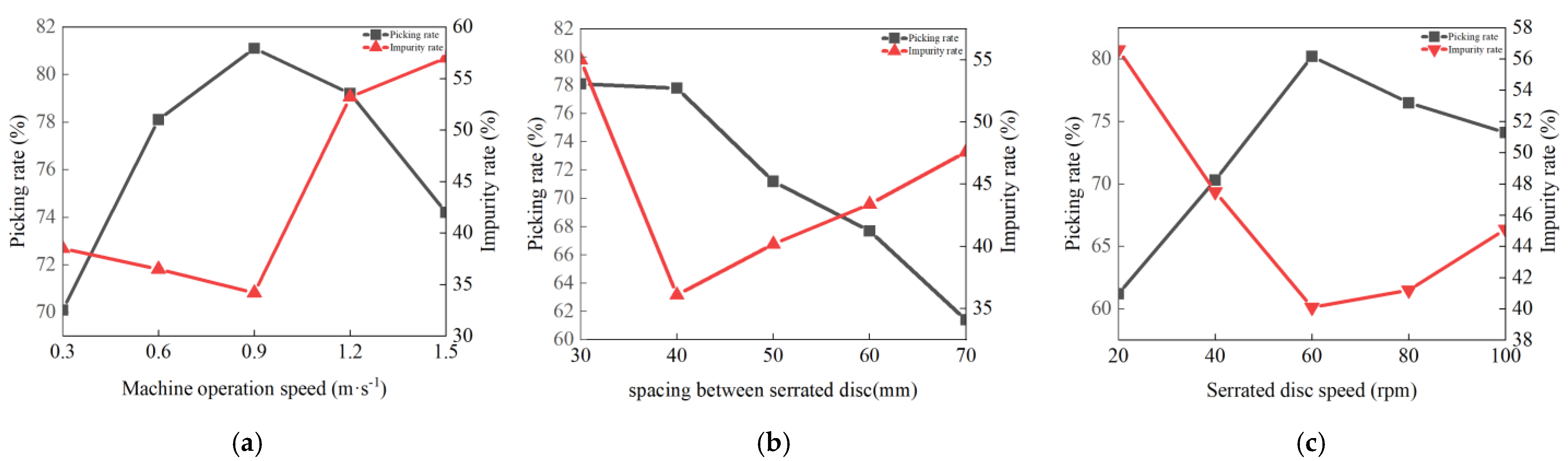
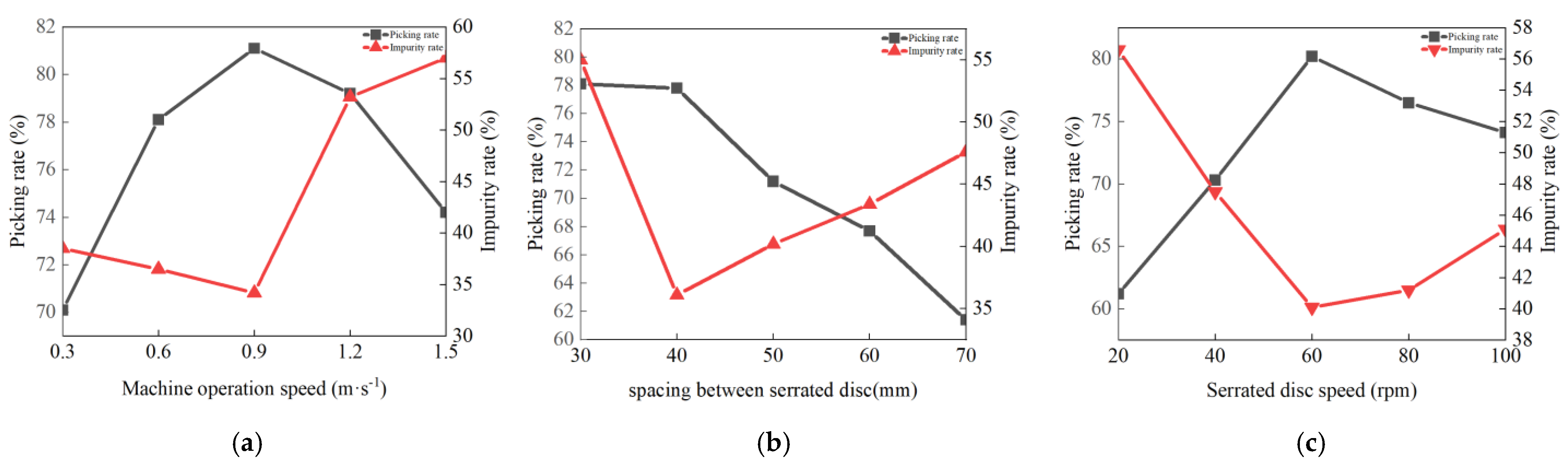
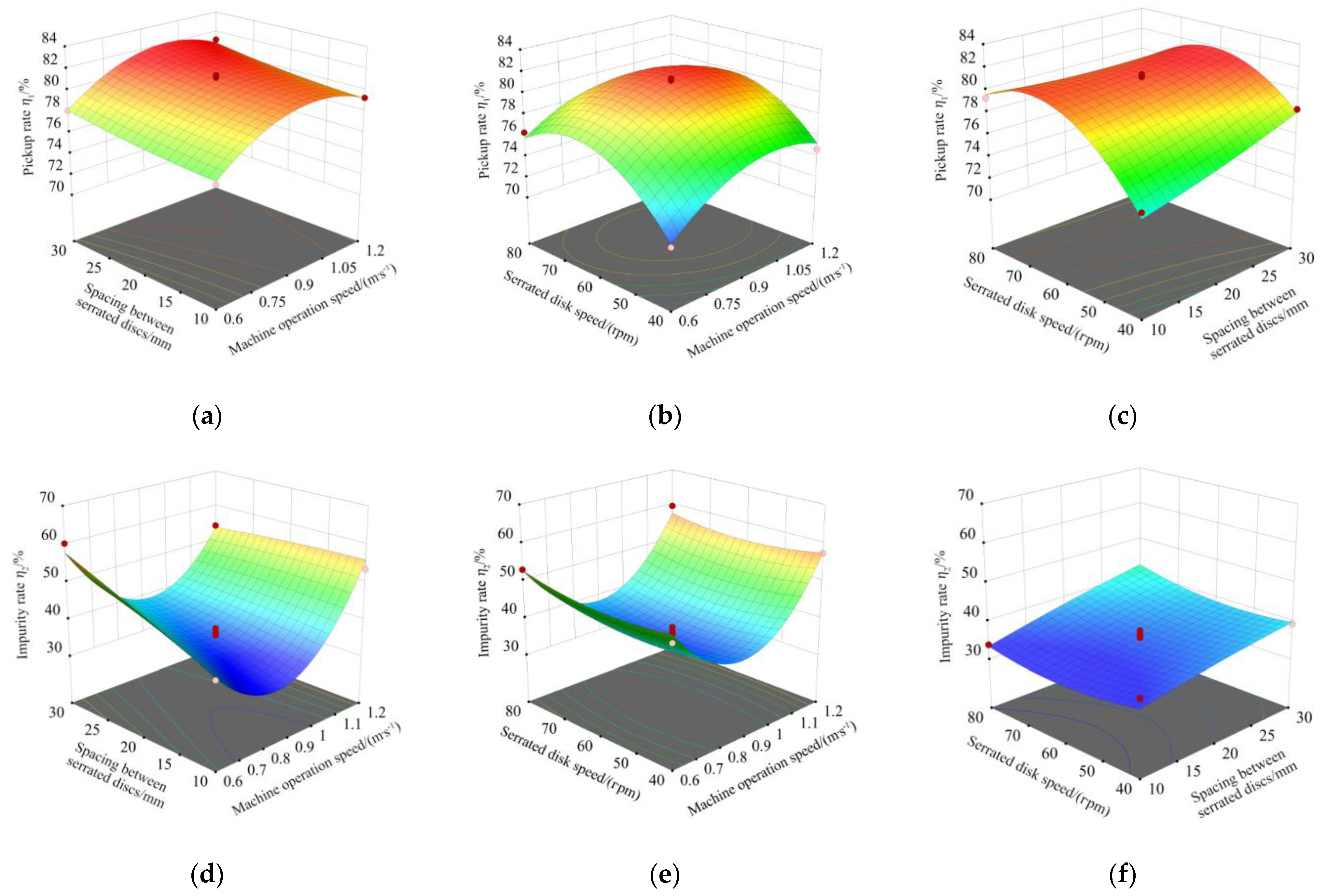
- Considering the machine operating speed, spacing between serrated discs, and serrated disc speed as the experimental factors, the picking and impurity rates of the cotton fallen on the ground were used as the test indicators. Additionally, the response surface data were analyzed using Design Expert software, and multiple fittings obtained the regression equation of the picking and impurity rates. The influence of the interaction of various factors on the picking and impurity rates was determined.
- Experimental tests on the device proved that when the optimized machine operating speed was 0.96 m/s, the spacing between serrated discs was 40 mm, and the speed of the serrated disc was 68 rpm. In addition, the picking and impurity rates of the cotton fallen on the ground were 79.09 and 35.12%, respectively. The optimized operating parameters were verified experimentally. Relative errors between the experimental results and optimized theoretical values of the picking and impurity rates were 2.37 and 3.79%, respectively, relatively small. Thus, the model was highly reliable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jie, Z. The Research On Environment Cost in Cotton Production in Xinjiang. Master’s Thesis, Tarim University, Tarim, China, 2014. [Google Scholar]
- Abdelraheem, A.; Esmaeili, N.; O’Connell, M.; Zhang, J. Progress and perspective on drought and salt stress tolerance in cotton. Ind. Crops Prod. 2019, 130, 118–129. [Google Scholar] [CrossRef]
- ShuXun, Y.; Shuli, F.; Hantao, W.; Hengling, W.; Chaoyou, P. Progresses in Research on Cotton High Yield Breeding in China. Sci. Agric. Sin. 2016, 49, 3465–3476. [Google Scholar] [CrossRef]
- Wang, Y.C.; Peng, S.B.; Huang, J.L.; Zhang, Y.L.; Feng, L.; Zhao, W.Q.; Qi, H.K.; Zhou, G.S.; Deng, N.Y. Prospects for cotton self-sufficiency in China by closing yield gaps. Eur. J. Agron. 2022, 133, 126437. [Google Scholar] [CrossRef]
- Khan, N.; Han, Y.; Xing, F.; Feng, L.; Wang, Z.; Wang, G.; Yang, B.; Fan, Z.; Lei, Y.; Xiong, S. Plant Density Influences Reproductive Growth, Lint Yield and Boll Spatial Distribution of Cotton. Agronomy 2020, 10, 14. [Google Scholar] [CrossRef] [Green Version]
- Aslam, S.; Khan, S.H.; Ahmed, A.; Dandekar, A.M. The tale of cotton plant: From wild type to domestication, leading to its improvement by genetic transformation. Am. J. Mol. Biol. 2020, 10, 91–127. [Google Scholar] [CrossRef] [Green Version]
- Beibei, Z.; Wei, G.; Jianyu, C.; Kangguo, M.; Ying, M.; Lin, H. Assessment of the Biomass Energy Use Potential of Cotton Byproducts in China. Cotton Sci. 2016, 28, 384–391. [Google Scholar] [CrossRef]
- Tingguan, C.; Hongwen, Z.; Lei, W.; Longchang, Z.; Jun, W.; Jianxin, L.; Yanqing, G. Optimization and experiments of picking head transmission system of horizontal spindle type cotton picker. Trans. Chin. Soc. Agric. Eng. 2020, 36, 18–26. [Google Scholar] [CrossRef]
- Cheng, W.M.; Wang, L. How to reduce the cost of cotton cultivation? A Case Study of Xinjiang, China. Custos E Agronegocio Line 2019, 15, 458–470. [Google Scholar]
- Xiuru, L.; Xiaoyue, J.; Jiahui, N. The Present Situation and Prospects of Cotton Industry Development in China. The Present Situation and Prospects of Cotton Industry. Sci. Agric. Sin. 2018, 51, 26–36. [Google Scholar] [CrossRef]
- Chengling, Z.; Tianhui, L.; Jianyu, L. Detection of Impurity Rate of Machine-Picked Cotton Based on Improved Canny Operator. Electronics 2022, 11, 974. [Google Scholar] [CrossRef]
- GB/T 21397-2008; Cotton Harvester. Agriculture Machinery of Standardization Administration of China. China Standard Press: Beijing, China, 2018.
- Statistical Bureau of the People’s Republic of China. China Statistical Yearbook; China Statistics Press: Beijing, China, 2021. [Google Scholar]
- Lindsey, M.; Charles, S.C.; Joe, E. Mechanical gleaning and ginning of ground-loss cotton in the Yazoo-Mississippi Delta. 1969. Available online: https://scholarsjunction.msstate.edu/cgi/viewcontent.cgi?article=1074&context=mafes-bulletins (accessed on 20 March 2022).
- Lehman, L.A. Ground Cotton Retriever with Dual Cleaning Means. 1985. Available online: https://patents.google.com/patent/US4497088 (accessed on 5 March 2022).
- Jianlong, H.; Xiaolong, H. Air Suction Type Picking Machine for Cotton Falling on Ground. 2022. Available online: https://patents.google.com/patent/CN215380014U (accessed on 8 March 2022).
- Shi, G.; Li, J.; Kan, Z.; Ding, L.; Ding, H.; Zhou, L.; Wang, L. Design and Parameters Optimization of a Provoke-Suction Type Harvester for Ground Jujube Fruit. Agriculture 2022, 12, 409. [Google Scholar] [CrossRef]
- Guangli, S.; Liyong, S.; Kun, L. Machine for Picking Cotton Falling to Ground. 2021. Available online: https://patents.google.com/patent/CN214102380U (accessed on 8 March 2022).
- Changlin, C.; Lei, S.; Yutong, Z.; Senlin, M.; Yongfei, S.; Mingsen, H. Design and experiment of the MQZ-4A type site cotton pre-processor. J. Chin. Agric. Mech. 2015, 36, 17–19. [Google Scholar] [CrossRef]
- Huang, M.; Shi, L.; Zhang, Y.; Chen, C.; Sun, Y.; Xie, Q.; Kong, F. Optimization experiment of machine-mounted seed cotton pre-treatment apparatus for cotton stripper harvester. Trans. Chin. Soc. Agric. Eng. 2016, 32, 21–29. [Google Scholar] [CrossRef]
- Hu, W.; Chen, X.; Wang, J.; Li, Y. Construction and finite element simulation of the saw type gin stand using fractal theory. Text. Res. J. 2020, 90, 2755–2768. [Google Scholar] [CrossRef]
- Le, S. Cleaning performance of modified cylinder cleaners. J. Cotton Sci. 2006, 10, 273–283. [Google Scholar]
- Zhong, W.Q.; Yu, A.B.; Liu, X.J.; Tong, Z.B.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
- Wu, T.; Huang, W.F.; Chen, X.S.; Ma, X.; Han, Z.Q.; Pan, T. Calibration of discrete element model parameters for cohesive soil considering the cohesion between particles. J. South China Agric. Univ. 2017, 38, 93–98. [Google Scholar] [CrossRef]
- Xianlinang, W.; Hong, H.; Qingjie, W.; Hongwen, L.; Jin, H.; Wanzhi, C. Calibration method of soil contact characteristic parameters based on DEM theory. Trans. Chin. Soc. Mach. 2017, 48, 78–85. [Google Scholar]
- Jianhua, X.; Yuxin, Y.; Silin, C.; Yi, Z.; Yabin, Z.; Weibin, M. Design and experiments of rake type surface residual film recycling machine with guide chain. Trans. Chin. Soc. Agric. Eng. 2020, 36, 76–86. [Google Scholar] [CrossRef]
- Mingsen, H.; Lei, S.; Yutong, Z.; Changlin, C.; Yongfei, S.; Qing, X.; Fanting, K.; Chongyou, W. Revised design and experiments on brush-rolling cotton harvester. Trans. Chin. Soc. Agric. Eng. 2017, 33, 41–47. [Google Scholar] [CrossRef]
- Sohail, Y.; Parag, B.; Nemeshwaree, B.; Giorgio, R. Optimizing Organophosphorus Fire Resistant Finish for Cotton Fabric Using Box-Behnken Design. Int. J. Environ. Res. 2016, 10, 313–320. [Google Scholar] [CrossRef]
- Xuejun, Z.; Jiaqiang, L.; Zenglu, S.; Wei, J.; Jinshan, Y.; Mengjie, Y. Design and parameter optimization of reverse membrane and soil separation device for residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2019, 35, 46–55. [Google Scholar] [CrossRef]
- Wen, H.; Di, W.; Xiaochuan, C.; Jun, W.; Yong, L. Finite element simulation of cotton serrated ginning state based on cottonseed modeling. J. Text. Res. 2020, 41, 27–32. [Google Scholar] [CrossRef]
- Wei, Y.; Zhichao, H.; Nu, W.; Hongbo, X.; Zhaoyan, Y.; Xinxing, Z. Parameter optimization and experiment for plastic film transport mechanism of shovel screen type plastic film residue collector. Trans. Chin. Soc. Agric. Eng. 2017, 33, 17–24. [Google Scholar] [CrossRef]
- Lili, S.; Zhichao, H.; Fengwei, G.; Feng, W.; Penglai, W. Design and parameter optimization on teeth residue plastic film collector of ridged peanut. Trans. Chin. Soc. Agric. Eng. 2017, 33, 8–15. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Structure form | Traction type |
| Overall dimension (length × width × height)/mm | 1670 × 1240 × 1550 |
| Engine rated power/kW | 51.5 |
| Effective working width/mm | 1000 |
| Picking rate/% | ≥75 |
| Impurity rate/% | 40≤ |
| Item | Parameter | Value |
|---|---|---|
| Soil particles | Poisson’s ratio | 0.30 |
| Shear modulus/Pa | 5 × 107 | |
| Density/(kg·m−3) | 2600.00 | |
| Cotton-picking mechanism | Poisson’s ratio | 0.30 |
| Shear modulus/Pa | 7.90 × 1010 | |
| Density/(kg·m−3) | 7850.00 | |
| Particle−Particles | Recovery coefficient | 0.21 |
| Static friction coefficient | 0.68 | |
| Dynamic friction coefficient | 0.27 | |
| Particle−Cotton-picking mechanism | Recovery coefficient | 0.54 |
| Static friction coefficient | 0.53 | |
| Dynamic friction coefficient | 0.13 |
| Coded Value | Machine Operation Speed X1 (m·s−1) | Spacing between Serrated Discs X2 (mm) | Serrated Disc Speed X3 (rpm) |
|---|---|---|---|
| −1 | 0.6 | 40 | 40 |
| 0 | 0.9 | 50 | 60 |
| 1 | 1.2 | 60 | 80 |
| Test | X1 | X2 | X3 | η1 | η2 |
|---|---|---|---|---|---|
| 1 | 0 | 1 | 1 | 78.1 | 40.1 |
| 2 | 0 | 0 | 0 | 81.4 | 36.5 |
| 3 | −1 | 1 | 0 | 78.1 | 60.3 |
| 4 | −1 | 0 | −1 | 71.1 | 48.3 |
| 5 | 1 | 0 | −1 | 74.7 | 57.4 |
| 6 | 0 | 0 | 0 | 80.6 | 37.6 |
| 7 | 0 | 0 | 0 | 79.9 | 34.7 |
| 8 | 1 | −1 | 0 | 79.3 | 53.6 |
| 9 | 0 | 0 | 0 | 81.3 | 33.8 |
| 10 | 1 | 1 | 0 | 81.2 | 54.3 |
| 11 | −1 | −1 | 0 | 76.3 | 39.7 |
| 12 | 0 | 1 | −1 | 78.3 | 39.4 |
| 13 | 1 | 0 | 1 | 77.5 | 59.6 |
| 14 | 0 | 0 | 0 | 81.2 | 35.7 |
| 15 | 0 | −1 | −1 | 74.4 | 36.4 |
| 16 | 0 | −1 | 1 | 79.3 | 33.8 |
| 17 | −1 | 0 | 1 | 76.3 | 53.1 |
| Source of Variation | DOF | Picking Rate η1/% | Impurity Rate η2/% | ||||
|---|---|---|---|---|---|---|---|
| Sum of Squares | F | Significant Level p | Sum of Squares | F | Significant Level p | ||
| Models | 9 | 130.47 | 30.89 | <0.0001 ** | 1514.95 | 26.68 | 0.0001 ** |
| X1 | 1 | 14.85 | 31.64 | 0.0008 ** | 69.03 | 10.94 | 0.0130 * |
| X2 | 1 | 5.12 | 10.91 | 0.0131 * | 117.05 | 18.55 | 0.0035 ** |
| X3 | 1 | 20.16 | 42.96 | 0.0003 ** | 3.25 | 0.5153 | 0.4961 |
| X1 × 2 | 1 | 0.0025 | 0.0053 | 0.9439 | 99.00 | 15.69 | 0.0055 ** |
| X1 × 3 | 1 | 1.44 | 3.07 | 0.1233 | 1.69 | 0.2679 | 0.6207 |
| X2 × 3 | 1 | 6.50 | 13.85 | 0.0074 * | 2.72 | 0.4315 | 0.5322 |
| X12 | 1 | 24.05 | 51.24 | 0.0002 ** | 1180.61 | 187.12 | <0.0001 ** |
| X22 | 1 | 0.2325 | 0.4954 | 0.5043 | 0.7785 | 0.1234 | 0.7357 |
| X32 | 1 | 54.27 | 115.62 | <0.0001 ** | 20.29 | 3.22 | 0.1160 |
| Residual | 7 | 3.29 | 44.16 | ||||
| Lack of fit | 3 | 1.70 | 1.43 | 0.3954 | 35.31 | 5.32 | 0.0701 |
| Pure error | 4 | 1.59 | 8.85 | ||||
| Total | 16 | 133.75 | 1559.12 | ||||
| Parameter | Picking Rate η1/% | Impurity Rate η2/% |
|---|---|---|
| Theoretical optimization value | 81.01 | 33.79 |
| Test average | 79.09 | 35.12 |
| Relative error | 2.37 | 3.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Cao, S.; Liu, Y.; Yang, Y.; Meng, X.; Ji, P. Design of Cotton Recovery Device and Operation Parameters Optimization. Agriculture 2022, 12, 1296. https://doi.org/10.3390/agriculture12091296
Wang H, Cao S, Liu Y, Yang Y, Meng X, Ji P. Design of Cotton Recovery Device and Operation Parameters Optimization. Agriculture. 2022; 12(9):1296. https://doi.org/10.3390/agriculture12091296
Chicago/Turabian StyleWang, Hezheng, Silin Cao, Yongrui Liu, Yuxin Yang, Xiangyu Meng, and Peng Ji. 2022. "Design of Cotton Recovery Device and Operation Parameters Optimization" Agriculture 12, no. 9: 1296. https://doi.org/10.3390/agriculture12091296
APA StyleWang, H., Cao, S., Liu, Y., Yang, Y., Meng, X., & Ji, P. (2022). Design of Cotton Recovery Device and Operation Parameters Optimization. Agriculture, 12(9), 1296. https://doi.org/10.3390/agriculture12091296