
Efficacy of Sweet Potato Transplanting Machine for Different Cultivation Systems in Northern China

Abstract
1. Introduction
2. Design of the 2CGFS-2 Compound Sweet Potato Transplanter
2.1. Background of Agronomic Requirements for Sweet Potato Cultivation
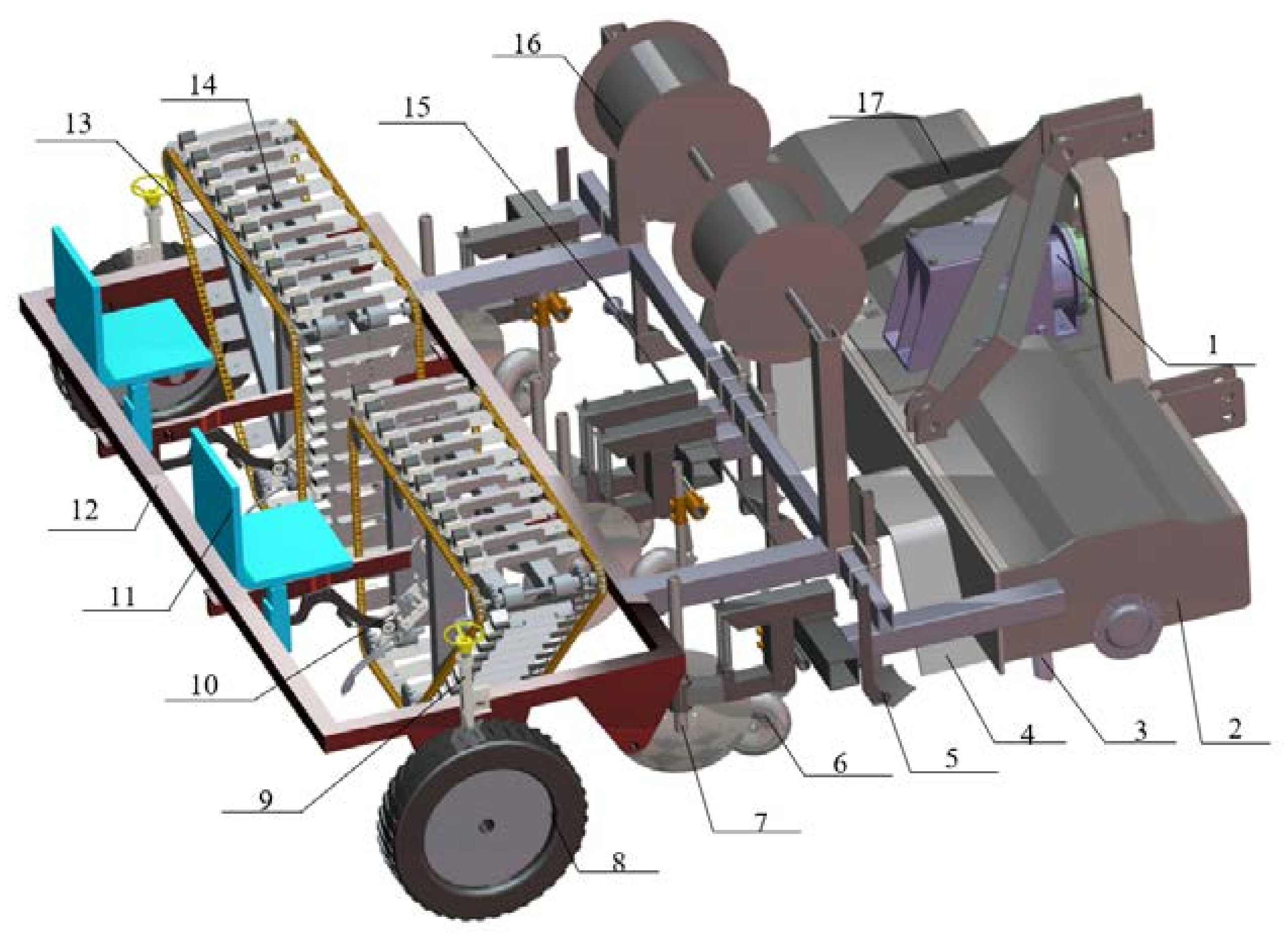
2.2. Machine Structure and Working Principle
2.3. Slips Transplanting Apparatus
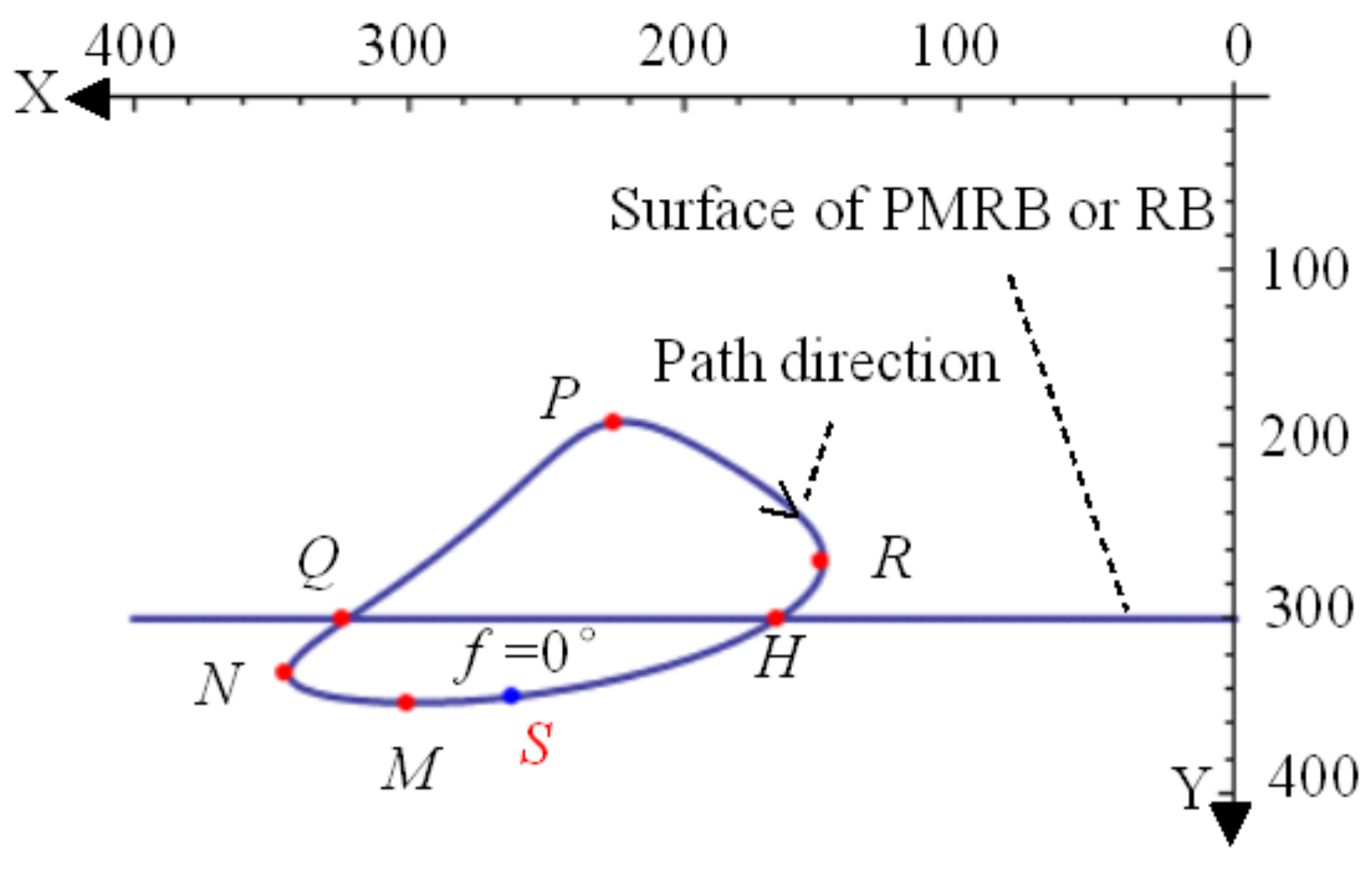
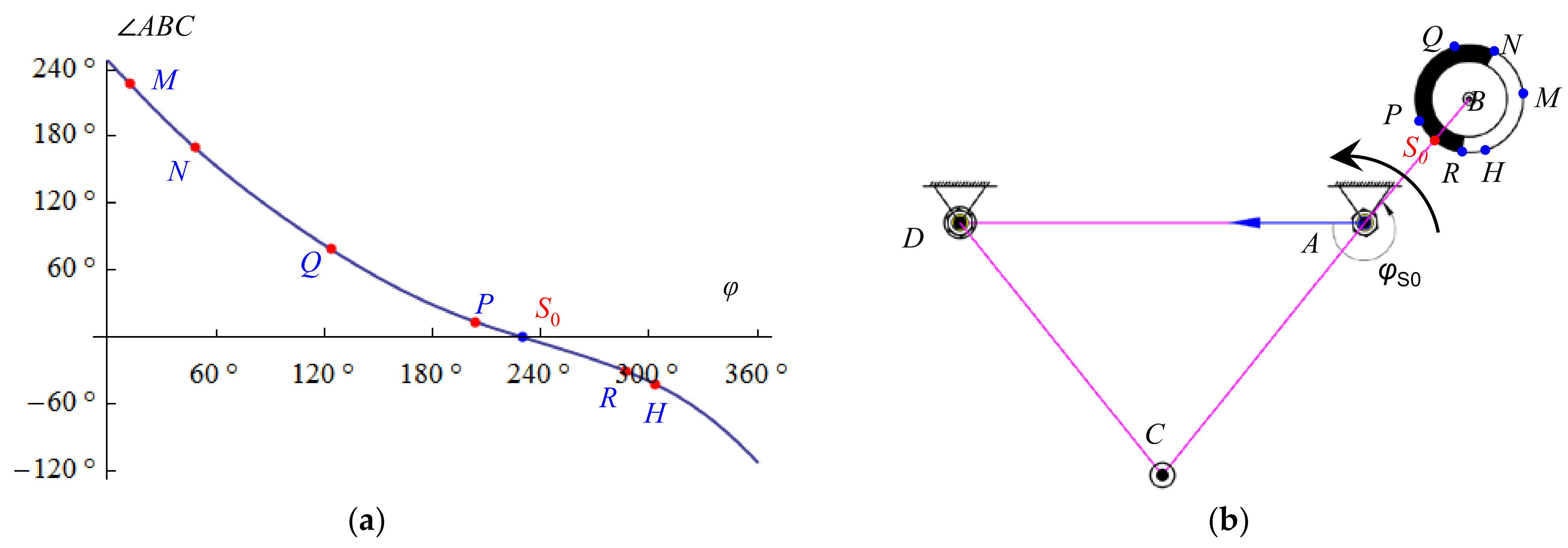
2.3.1. Slips Taking-Planting Mechanism
2.3.2. Working Sequence Parameters of the Slip Taking-Planting Mechanism
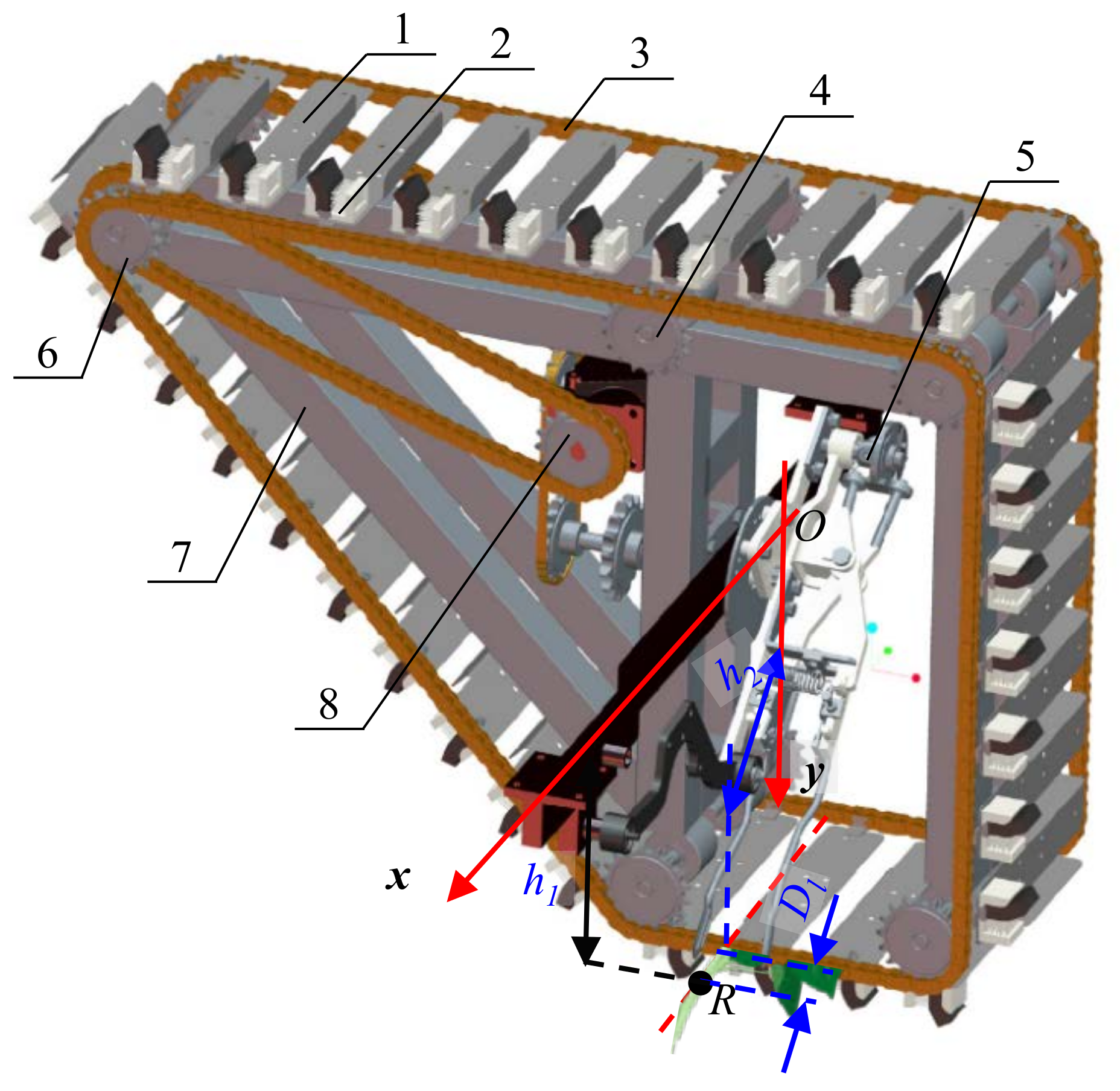
2.3.3. Slip Delivery Mechanism
2.4. Transmission Design of the Slip Transplanting Apparatus
3. Materials and Methods for Field Experiment
3.1. Site Description and Plant Materials
3.2. Missing Seedling Rate and Qualified Rate of Transplanting Population
3.3. Uniformity of Transplant Spacing and Qualified Rate of Transplanting Depth
3.4. Length of Sweet Potato Slips under the Soil
3.5. Tuber Yield
3.6. Data Analysis
4. Results and Discussion
4.1. Missing Seedling Rate and Qualified Rate of Transplanting Population
4.2. Uniformity of Transplant Spacing and Qualified Rate of Transplanting Depth
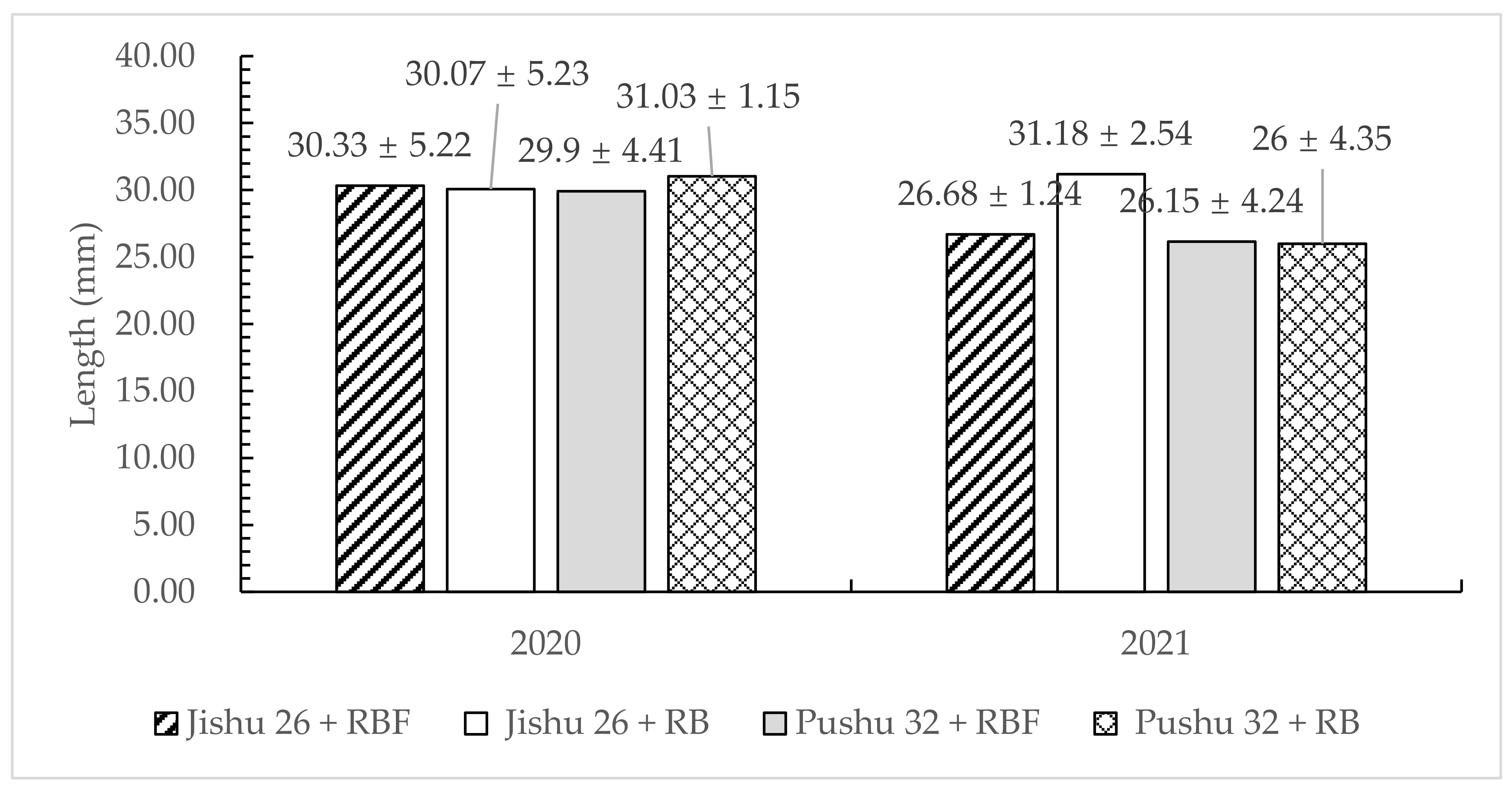
4.3. Length of Sweet Potato Slips under the Soil
4.4. Tuber Yield
5. Conclusions
- (1)
- The missing seedling rate QM and qualified rate of transplanting population QZ for each treatment using the 2CGFS-2 compound transplanter were <1.2% and >95.0% in both 2020 and 2021, which were all better than the values specified in the standard.
- (2)
- The plant spacing coefficient of variation for all treatments varied from 2.64% to 5.58% in 2020 and from 3.14% to 6.82% in 2021. However, the differences were not significant (p > 0.05). The type of sweet potato cultivar and cultivation system had no significant effect on the qualified rate of transplanting depth during 2020–2021, which, with a mean value of 96.28%, was much higher than the 75% recorded in the standards.
- (3)
- The mean values of the length under the soil were 193.7 mm, 195.0 mm, 194.5mm and 193.3 mm for the Jishu 26+RBF treatment, Jishu 26 + RB treatment, Pushu 32 + RBF treatment, and Pushu 32+RB, respectively, using the 2CGFS-2 compound sweet potato transplanter. The differences were negligible (p > 0.05), and the deviation in the length was much smaller than the internode length of each sweet potato variety (ca. 40 mm).
- (4)
- Among the RBF treatments, mean fresh tuber yields for Jishu 26 and Pushu 32 were 27.1% and 22.5%, respectively, significantly (p < 0.05) higher than those in the RB treatments. In each treatment, the tuber weight per plant was inconsistent and varied by up to 35%, but the inconsistency was alleviated by the improved planting quality of each sweet potato plant using the 2CGFS-2 compound transplanter.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Oladejo, A.O.; Ma, H.; Qu, W.; Zhou, C.; Wu, B.; Yang, X. Influence of ultrasound pretreatments on diffusion coefficients, texture and colour of osmodehydrated sweet potato (Ipomea batatas). Int. J. Food Sci. Technol. 2017, 52, 888–896. [Google Scholar] [CrossRef]
- Low, J.; Ball, A.; Magezi, S.; Njoku, J.; Mwanga, R.; Andrade, M.; Tomlins, K.; Dove, R.; Mourik, T.V. Sweet potato development and delivery in sub-Saharan Africa. Afr. J. Food Agric. Nutr. Dev. 2017, 17, 11955–11972. [Google Scholar] [CrossRef]
- Huang, Z.; Liu, Y.; Qi, G.; Brand, D.; Zheng, S. Role of Vitamin A in the Immune System. J. Clin. Med. 2018, 7, 258. [Google Scholar] [CrossRef] [PubMed]
- FAO (Food and Agriculture Organization). FAOSTAT Online Statistical Database: Crops and Livestock Products 2020. Available online: http://www.fao.org/faostat/zh/#data/QC (accessed on 17 February 2022).
- FAO (Food and Agriculture Organization). FAOSTAT Online Statistical Database: Food Balance 2019. FAOSTAT. Available online: http://www.fao.org/faostat/zh/#data/QC (accessed on 17 February 2022).
- Agili, S.; Nyende, B.; Ngamau, K.; Masinde, P. Selection, yield, drought tolerance indices of orange-fleshed sweet potato (Ipomoea batatas Lam) hybrid clone. J. Nutr Food Sci. 2012, 2, 1–8. [Google Scholar]
- Wang, B. Overview of sweet potato production in China. In Main Cultivation Modes of Sweet Potato in China, 1st ed.; Zhang, L., Ma, D., Wang, Q., Wang, B., Eds.; China Agricultural Science and Technology Press: Beijing, China, 2012; pp. 1–8. [Google Scholar]
- Sun, H.Y.; Zhang, X.Y.; Chen, S.Y.; Pei, D.; Liu, C.M. Effects of harvest and sowing time on the performance of the rotation of winter wheat-summer maize in the North China Plain. Soil Tillage Res. 2007, 25, 239–247. [Google Scholar] [CrossRef]
- NBSC (National Bureau of Statistics, China). The Statistical Bulletin of National Economy and Social Development in China; Peoples Republic of China, National Bureau of Statistics: Beijing, China, 2012. [Google Scholar]
- Belehu, T. Agronomical and Physiological Factors Affecting Growth, Development and Yield of Sweet Potato in Ethiopia; Doctor of Philosophy, University of Pretoria: Hatfield, Pretoria, 2003. [Google Scholar]
- Kuranouchi, T.; Nakamura, Y.; Takada, A.; Tamiya, S.; Nakatani, M.; Kumagai, T. Effects of mulching with polyethylene film and weather on agronomic characters of sweet potato varieties for steamed and cured slices processing. Jpn. J. Crop Sci. 2010, 79, 491–498. [Google Scholar] [CrossRef]
- Gajanayake, B.; Reddy, K.R.; Shankle, M.W.; Arancibia, R.A. Growth, developmental, and physiological responses of two sweetpotato [Ipomoea batatas L. (Lam)] cultivars to early season soil moisture deficit. Sci. Hortic. 2014, 168, 218–228. [Google Scholar] [CrossRef]
- Hou, F.; Zhang, L.; Xie, B.; Dong, S.; Zhang, H.; Li, A.; Wang, Q. Effect of plastic mulching on the photosynthetic capacity, endogenous hormones and root yield of summer-sown sweetpotato (Ipomoea batatas (L). Lam.) in Northern China. Acta Physiol. Plant. 2015, 37, 164. [Google Scholar] [CrossRef]
- Jiang, Y.; Shi, C.; Wang, Z.; Wang, C.; Liu, H. Effects of plastic film mulching on arable layer soil temperature, moisture and yield of sweet potato. Chin. J. Eco-Agric. 2014, 22, 627–634. [Google Scholar]
- Hou, F.Y.; Dong, S.X.; Xie, B.T.; Zhang, H.Y.; Li, A.X.; Wang, Q.M. Mulching with plastic film improved the root quality of summer-sown sweet potato (Ipomoea batatas (L). Lam.) in northern China. J. Integr. Agric. 2019, 18, 982–991. [Google Scholar] [CrossRef]
- Prasanna Kumar, G.V.; Raheman, H. Vegetable Transplanters for Use in Developing Countries—A Review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar] [CrossRef]
- Checchi & Magli Transplanters. Available online: https://www.checchiemagli.com/macchine/trapiantatrice-foxdrive-r14/ (accessed on 7 October 2018).
- Mulch Equipment-Holland Transplanter. Available online: https://transplanter.com/mulch-equipment/ (accessed on 29 September 2016).
- FPC Layer and Transplanter. Available online: https://ferraricostruzioni.com/en/film-transplanters/23-fpc-layer-and-transplanter.html (accessed on 19 May 2022).
- Liu, J.; Cao, W.; Tian, D.; Zhao, H. Kinematic Analysis and Test on Transplanting Mechanism with Effective Zero-speed Transplanting on Mulch Film. J. Mech. Eng. 2017, 53, 76–84. [Google Scholar] [CrossRef]
- Hu, L.; Hu, Z.; Xie, Y.; Tian, L.; Ji, F.; Wang, B. Study on the route of mechanization of sweet potato (ipomoea batatas lam.) production technology in China. Chin. Agric. Mech. 2011, 5, 20–25. [Google Scholar]
- Chen, L.H.; Younis, T.S.; Allison, M. Horizontal Transplanting of Sweet Potatoes. Trans. ASAE 1982, 25, 1524–1528. [Google Scholar] [CrossRef]
- Hu, L.; Wang, B.; Wang, G.; Yu, Z.; You, Z.; Hu, Z.; Wang, B.; Gao, X. Design and experiment of type 2ZGF-2 duplex sweet potato transplanter. Trans. Chin. Soc. Agric. Eng. 2016, 32, 8–16. [Google Scholar]
- Murakami, K.; Takahiko, T.; Yamaguchi, H.; Tanazaki, A. Seedling Transplanter. CN Patent 103988621B, 20 August 2014. [Google Scholar]
- Parwada, C.; Gadzirai, C.T.; Sithole, A.B. Effect of Ridge Height and Planting Orientation on Ipomoea Batatas (sweet potato) Production. J. Agric. Biotechnol. Sustain. Dev. 2011, 3, 72–76. [Google Scholar]
- Chagonda, I.; Mapfeka, R.F.; Chitata, T. Effect of Tillage Systems and Vine Orientation on Yield of Sweet Potato (Ipomoea batatas L.). Am. J. Plant. Sci. 2014, 5, 3159–3165. [Google Scholar] [CrossRef]
- Ma, D.; E, W. Handbook of Green Light Simplified Cultivation Techniques for Sweet Potato, 1st ed.; China Agricultural Press: Beijing, China, 2021. [Google Scholar]
- Wang, B.Q.; Zhang, L.M. Research progress on growth and development of sweet potato roots affected by environmental factors and agronomic measure. J. Jiangsu Norm. Univ. (Nat. Sci. Ed.) 2017, 35, 11–22. [Google Scholar]
- Li, Y. Mechanism analysis and synthesis. In Mechanical Principle, 1st ed.; Wei, W., Gao, Y., Zhang, Y., Eds.; China Agricultural University Press: Beijing, China, 2005; pp. 22–38. [Google Scholar]
- Hrones, J.A.; Nelson, G.L. Analysis of the Four-Bar Linkage: Its Application to the Synthesis of Mechanisms, 1st ed.; The Technology Press of the MIT and John Wiley&Sons, INC.: New York, NY, USA, 1951. [Google Scholar]
- Su, Z.J.; Wang, G.H.; Yan, J.H.; Dong, C.J. Evaluation Model of Rural Drinking Water Project Based on Entropy Weight and Fuzzy Comprehensive Evaluation Method. Asian Agric. Res. 2022, 14, 62–65. [Google Scholar]
- Ministry of Industry and Information Technology of the People’s Republic of China. JB/T 10291-2013 Transplanter of Dry Land Plant; Machinery Industry Press: Beijing, China, 2013. [Google Scholar]
- Ministry of Agriculture and Rural Affairs of the People’s Republic of China. NY/T 3486-2019 Operating Quality for Vegetable Transplanter; China Agricultural Press: Beijing, China, 2019. [Google Scholar]
- Yan, W.; Hu, M.; Li, K.; Wang, J.; Zhang, W. Design and Experiment of Horizontal Transplanter for Sweet Potato Seedlings. Agriculture 2022, 12, 675. [Google Scholar] [CrossRef]
- Quan, B.; Ren, J.; Zhao, J.; Guo, P.; Xu, Y. Effects of Different Cutting Density and Cutting Time on Yield and Commercial Tuber Rate of Jishu 26. J. Shanxi Agric. Sci. 2021, 49, 869–871. [Google Scholar]
- Li, J.H.; Jia, Z.R.; Wang, L.Y.; Xie, X.H.; Xie, H.E.; Wu, Z.X.; Li, B. Effect of Ridge Tillage with Plastic Film Mulching on Temperature Increase and Preservation of Soil Moisture and Yield of Sweet Potato. J. Shanxi Agric. Sci. 2016, 44, 494–497. [Google Scholar]
- Firon, N.; LaBronte, D.; Villordon, A.; McGregor, C.; Kfir, Y.; Pressman, E. Botany and Physiology: Storage Root Formation and Development. In The Sweet Potato; Loebenstein, G., Thottapilly, G., Eds.; Springer Science + Bussiness Media BV: Berlin/Heidelberg, Germany, 2009; pp. 13–26. [Google Scholar]
- Villordon, D.R.; La Bonte, D.R.; Firon, N.; Kfir, K.; Pressman, E.; Schwartz, A. Characterization of Adventitious Root Development in Sweet Potato. HortScience 2009, 44, 651–655. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transplanting Year | Treatments | Missing Seedling Rate QM/% | Qualified Rate of Transplanting Population QZ/% |
|---|---|---|---|
| 2020 | Jishu 26 + RBF | 0.67 a | 96.77 a |
| Jishu 26 + RB | 0.83 a | 96.33 a | |
| Pushu 32 + RBF | 0.67 a | 95.80 a | |
| Pushu 32 + RB | 1.17 a | 95.23 a | |
| 2021 | Jishu 26 + RBF | 0.17 a | 98.77 a |
| Jishu 26 + RB | 0.83 ab | 97.87 ab | |
| Pushu 32 + RBF | 1.00 b | 97.53 b | |
| Pushu 32 + RB | 0.50 ab | 98.10 ab |
| Transplanting Year | Treatments | Plant Spacing Coefficient of Variation CVX/% | Qualified Rate of Transplanting Depth CVH/% |
|---|---|---|---|
| 2020 | Jishu 26 + RBF | 3.83 a | 95.17 a |
| Jishu 26 + RB | 4.61 a | 97.41 a | |
| Pushu 32 + RBF | 3.75 a | 96.52 a | |
| Pushu 32 + RB | 4.43 a | 94.82 a | |
| 2021 | Jishu 26 + RBF | 4.99 a | 98.96 a |
| Jishu 26 + RB | 5.82 a | 97.15 a | |
| Pushu 32 + RBF | 5.71 a | 94.00 b | |
| Pushu 32 + RB | 3.14 a | 96.23 ab |
| Transplanting Year | Treatments | Tubers Weight Per Plant/kg | Tuber Yield Per Hectare/t |
|---|---|---|---|
| 2020 | Jishu 26 + RBF | 0.98 a | 48.02 a |
| Jishu 26 + RB | 0.78 b | 38.42 b | |
| Pushu 32 + RBF | 0.93 a | 45.69 a | |
| Pushu 32 + RB | 0.75 b | 36.91 b | |
| 2021 | Jishu 26 + RBF | 0.94 a | 46.06 a |
| Jishu 26 + RB | 0.73 b | 35.61 b | |
| Pushu 32 + RBF | 0.90 a | 44.22 a | |
| Pushu 32 + RB | 0.74 b | 36.46 b |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; He, T.; Liu, H.; Shi, S.; Wang, B.; Zhou, J.; Liu, X.; Wei, G.; Zhang, R. Efficacy of Sweet Potato Transplanting Machine for Different Cultivation Systems in Northern China. Agriculture 2022, 12, 1184. https://doi.org/10.3390/agriculture12081184
Li H, He T, Liu H, Shi S, Wang B, Zhou J, Liu X, Wei G, Zhang R. Efficacy of Sweet Potato Transplanting Machine for Different Cultivation Systems in Northern China. Agriculture. 2022; 12(8):1184. https://doi.org/10.3390/agriculture12081184
Chicago/Turabian StyleLi, Hui, Tengfei He, Hu Liu, Song Shi, Baoqing Wang, Jilei Zhou, Xuechuan Liu, Guojian Wei, and Rongfang Zhang. 2022. "Efficacy of Sweet Potato Transplanting Machine for Different Cultivation Systems in Northern China" Agriculture 12, no. 8: 1184. https://doi.org/10.3390/agriculture12081184
APA StyleLi, H., He, T., Liu, H., Shi, S., Wang, B., Zhou, J., Liu, X., Wei, G., & Zhang, R. (2022). Efficacy of Sweet Potato Transplanting Machine for Different Cultivation Systems in Northern China. Agriculture, 12(8), 1184. https://doi.org/10.3390/agriculture12081184