
Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment


Abstract
1. Introduction
2. Materials and Study Area
3. The Fruit Tree Segmentation Method
- ▪
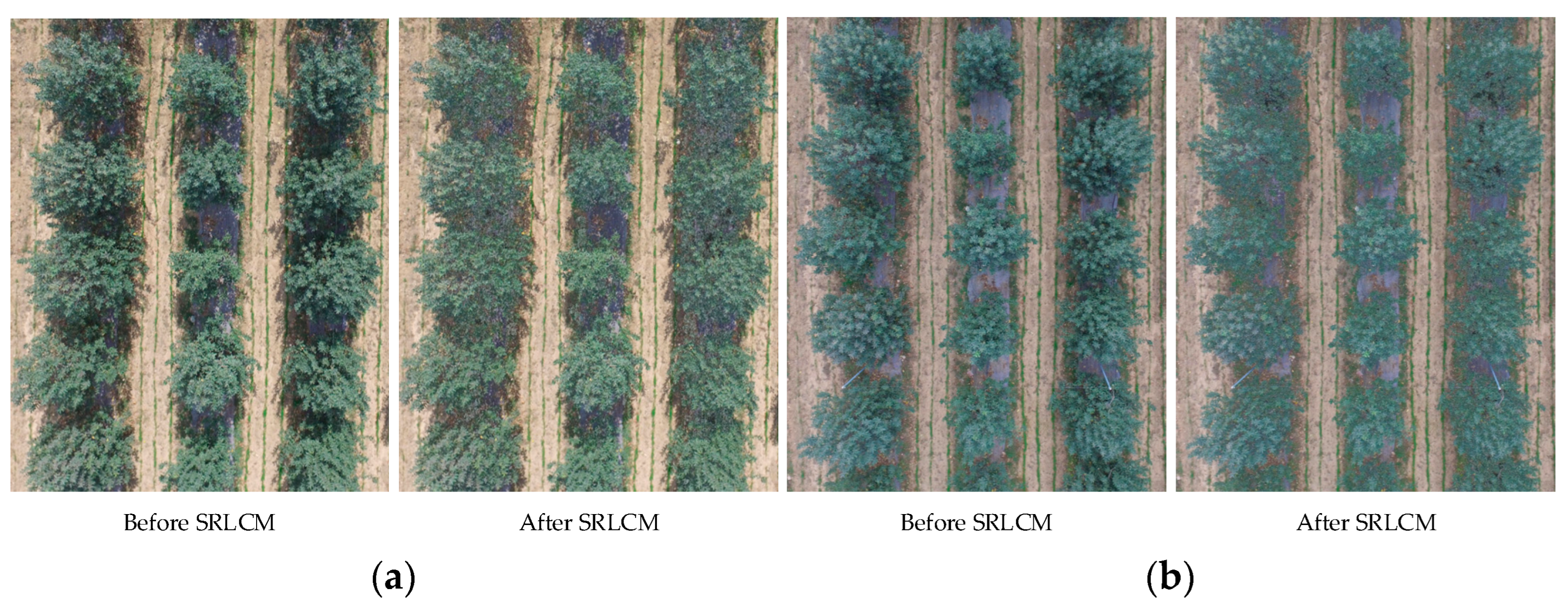
- (1) luminance compensation of fruit trees in shaded areas using the SRLCM method.
- ▪
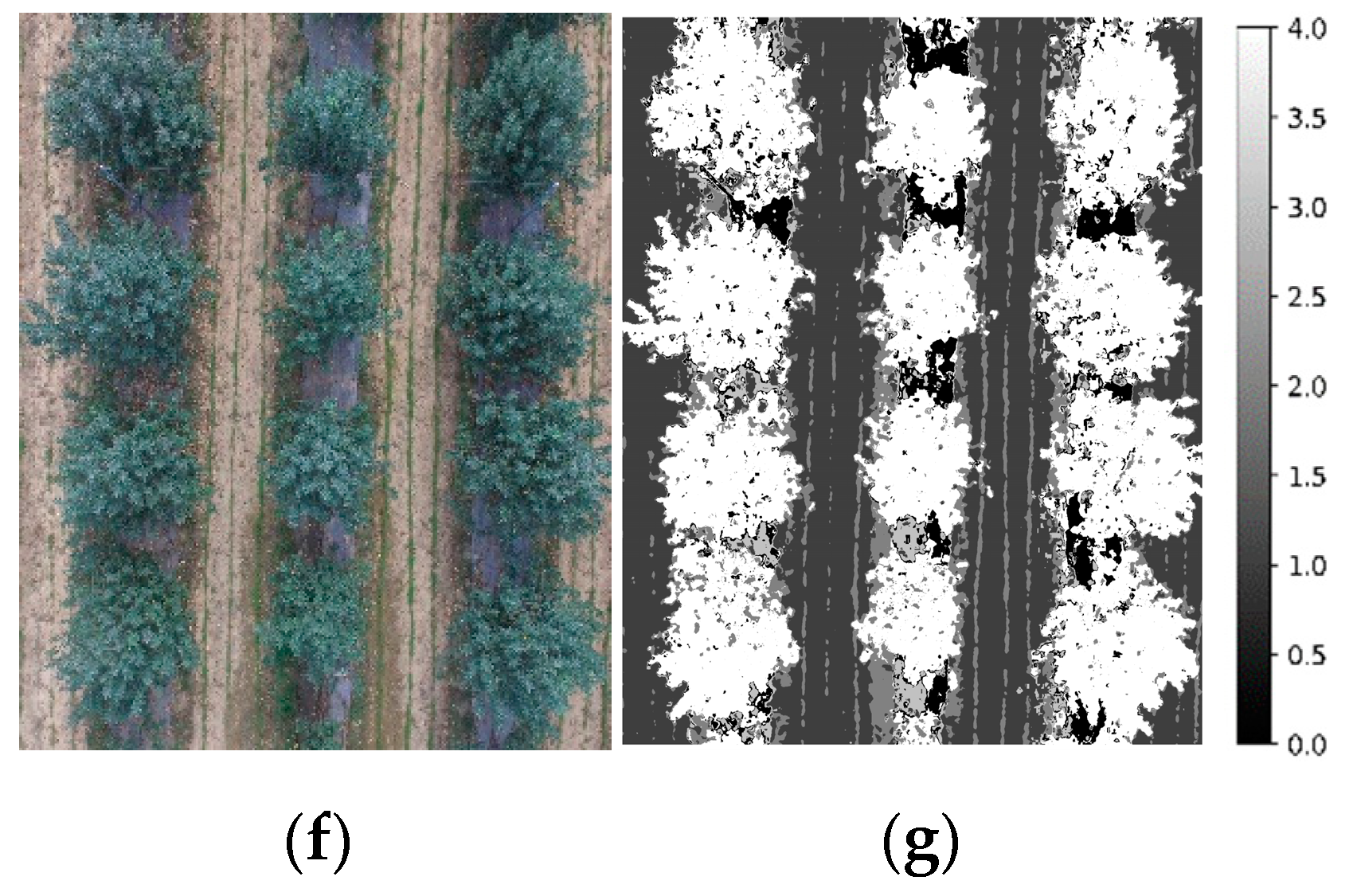
- (2) fruit tree image segmentation based on OCC-K:
- Firstly, ten standard color spaces along with all possible combinations of their channels are evaluated by using accuracy (A), precision (P), F1-score (F1), and recall (R) as evaluation indexes; then according to the evaluation results, the color channel with the highest A value (AOCC), the color channel with the highest p value (POCC), the color channel with the highest R value (ROCC), the color channel with the highest F1 value(FOCC), and the color channel with the highest mean value of four indicators(MOCC) are extracted as color features.
- Secondly, one standard K-means and four Mini Batch K-means are used to cluster AOCC, POCC, ROCC, FOCC, and MOCC, respectively.
- Finally, the clustering results are combined to obtain the final segmentation result.
3.1. Image Preprocessing
3.2. Fruit Tree Image Segmentation Method Based on Ensemble OCC-K
3.2.1. Color Feature Extraction
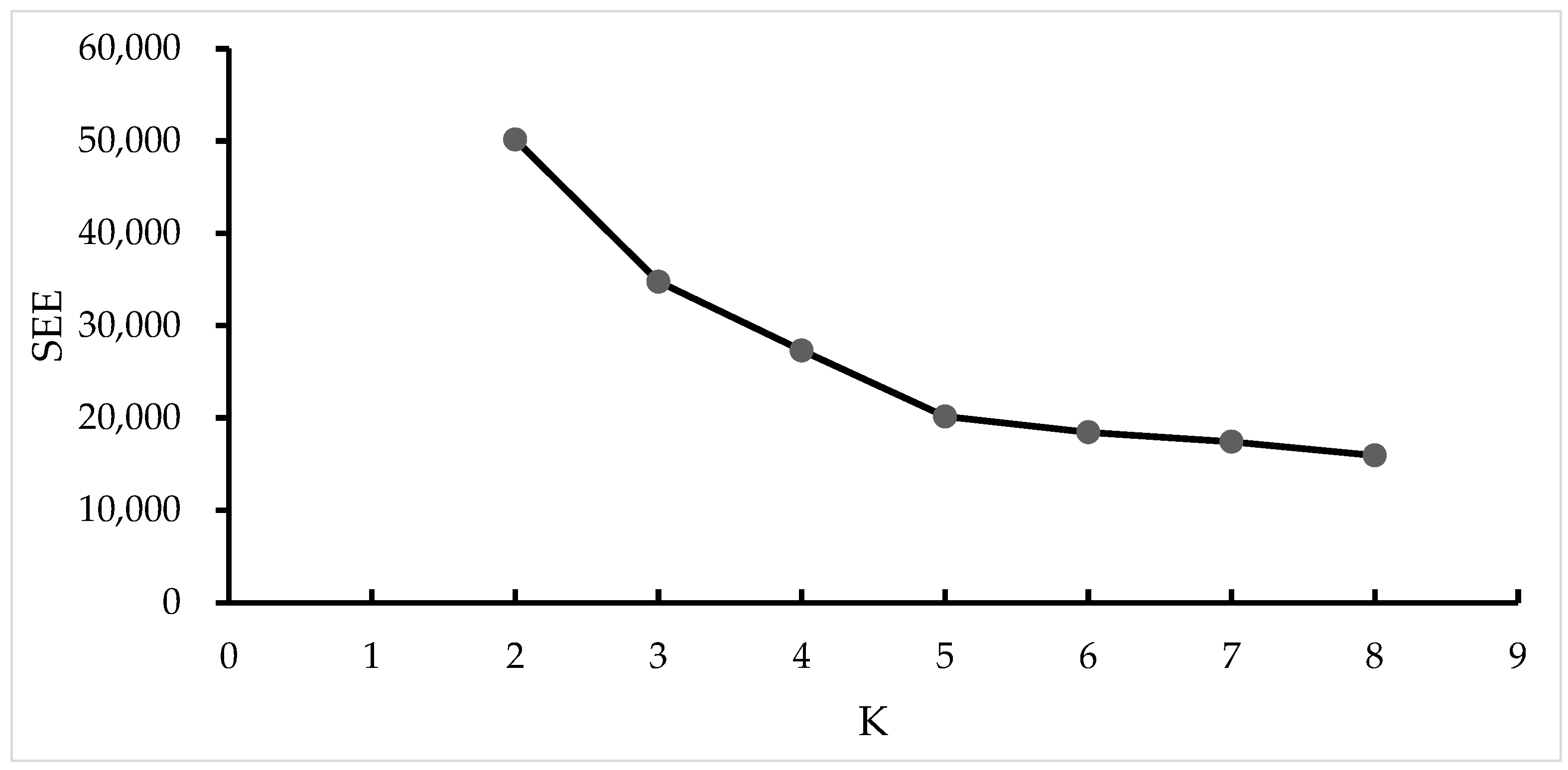
3.2.2. Clusters Initialization
3.2.3. Combining Clustering Results
3.2.4. Evaluation of Image Segmentation Methods
4. Results and Discussion
4.1. Image Preprocessing Test Results
4.2. Results of Color Space Evaluation
4.3. The Results of Image Segmentation Using the Proposed Method
4.4. Image Segmentation Method Evaluation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lan, Y.; Thomson, S.J.; Huang, Y.; Hoffmann, W.C.; Zhang, H. Current status and future directions of precision aerial application for site-specific crop management in the USA. Comput. Electron. Agric. 2010, 74, 34–38. [Google Scholar] [CrossRef]
- Zhang, B.; Changyuan, Z.; Hanzhe, L.; Shuo, Y. Development status Analysis of Precision Pesticide Application Techniques and Equipments. J. Agric. Mech. Res. 2016, 38, 1–5. [Google Scholar] [CrossRef]
- Yongjun, Z.; Bingtai, C.; Lyu, H. Research progress of orchard plant protection mechanization technology and equipment in China. Transactions of the Chinese Society of Agricultural Engineering. Trans. Chin. Soc. Agric. Eng. 2020, 36, 110–124. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2011, 81, 124–141. [Google Scholar] [CrossRef]
- Yandun, N.F.; Reina, G.; Torres, T.M.; Kantor, G.; Cheein, F.A. A Survey of Ranging and Imaging Techniques for Precision Agriculture Phenotyping. IEEE/ASME Trans. Mechatron. 2017, 22, 2428–2439. [Google Scholar] [CrossRef]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of Citrus Trees from Unmanned Aerial Vehicle Imagery Using Convolutional Neural Networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Marília, F.G.; Philippe, M.; Huawu, D. Individual tree crown detection in sub-meter satellite imagery using Marked Point Processes and a geometrical-optical model. Remote Sens. Environ. 2018, 211, 184–195. [Google Scholar] [CrossRef]
- Dameng, Y.; Wang, L. Individual mangrove tree measurement using UAV-based LiDAR data: Possibilities and challenges. Remote Sens. Environ. 2019, 223, 34–39. [Google Scholar] [CrossRef]
- Jintao, W.; Guijun, Y.; Hao, Y.; Yaohui, Z.; Zhenhai, L.; Lei, L.; Chunjiang, Z. Extracting apple tree crown information from remote imagery using deep learning. Comput. Electron. Agric. 2020, 174, 105504. [Google Scholar] [CrossRef]
- McCarthy, C.L.; Hancock, N.H.; Raine, S.R. Applied machine vision of plants: A review with implications for field deployment in automated farming operations. Intell. Serv. Robot. 2010, 3, 209–217. [Google Scholar] [CrossRef]
- Recio, J.; Hermosilla, T.; Ruiz, L.; Palomar, J. Automated extraction of tree and plot-based parameters in citrus orchards from aerial images. Comput. Electron. Agric. 2013, 9, 24–34. [Google Scholar] [CrossRef]
- Lin, K.; Chen, J.; Si, H.; Wu, J. A Review on Computer Vision Technologies Applied in Greenhouse Plant Stress Detection. Commun. Comput. Inf. Sci. 2013, 363, 192–200. [Google Scholar] [CrossRef]
- Story, D.; Kacira, M.; Kubota, C.; Akoglu, A.; An, L. Lettuce calcium deficiency detection with machine vision computed plant features in controlled environments. Comput. Electron. Agric. 2010, 74, 238–243. [Google Scholar] [CrossRef]
- Zhang, Z.; Luo, X.; Zang, Y.; Hou, F.; Xu, X. Segmentation algorithm based on color feature for green crop plants. Trans. CSAE 2011, 27, 183–189. [Google Scholar] [CrossRef]
- Lu, Y.; Young, S.; Wang, H.; Wijewardane, N. Robust plant segmentation of color images based on image contrast optimization. Comput. Electron. Agric. 2022, 193, 106711. [Google Scholar] [CrossRef]
- Hongbo, Y.; Nudong, Z.; Man, C. Review of Weeds Recognition Based on Image Processing. Trans. Chin. Soc. Agric. Mach. 2020, 51, 323–334. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Von Bargen, K.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Pajares, G.; Montalvo, M.; Romeo, J.; Guijarro, M. Support Vector Machines for crop/weeds identification in maize fields. Expert Syst. Appl. 2012, 39, 11149–11155. [Google Scholar] [CrossRef]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-time image processing for crop/weed discrimination in maize fields. Comput. Electron. Agric. 2010, 75, 337–346. [Google Scholar] [CrossRef]
- Cheng, H.D.; Jiang, X.H.; Sun, Y.; Wang, J. Color image segmentation: Advances and prospects. Pattern Recognit. 2001, 34, 2259–2281. [Google Scholar] [CrossRef]
- Yu, Z.; Li, C.; Shi, G. Environmentally adaptive crop extraction for agricultural automation using super-pixel and LAB Gaussian model. Recognit. Comput. Vis. 2018, 10609, 255–260. [Google Scholar] [CrossRef]
- Sabzi, S.; Abbaspour-Gilandeh, Y.; García-Mateos, G. A fast and accurate expert system for weed identification in potato crops using metaheuristic algorithms. Comput. Ind. 2018, 98, 80–89. [Google Scholar] [CrossRef]
- Huajian, L.; Lee, S.H.; Saunders, C. Development of a machine vision system for weed detection during both off-season and in-season in broadacre no-tillage cropping lands. Am. J. Agric. Biol. Sci. 2014, 9, 174–193. [Google Scholar] [CrossRef]
- Yaxiao, N.; Liyuan, Z.; Wenting, H. Extraction Methods of Cotton Coverage Based on Lab Color Space. Trans. Chin. Soc. Agric. 2018, 49, 240–249. [Google Scholar] [CrossRef]
- Zhai, R.; Fang, Y.; Lin, C.; Peng, H.; Liu, S.; Jun, L. Segmentation of field rapeseed plant image based on Gaussian HI color algorithm. Trans. Chin. Soc. Agric. Eng. 2016, 32, 142–147. [Google Scholar] [CrossRef]
- Sadeghi-Tehran, P.; Virlet, N.; Sabermanesh, K.; Hawkesford, M.J. Multi-feature machine learning model for automatic segmentation of green fractional vegetation cover for high-throughput field phenotyping. Plant Methods 2017, 13, 1–16. [Google Scholar] [CrossRef]
- García-Mateos, G.; Hernández-Hernández, J.; Escarabajal-Henarejos, D.; Jaén-Terrones, S.; Molina-Martínez, J. Study and comparison of color models for automatic image analysis in irrigation management applications. Agric. Water Manag. 2015, 151, 158–166. [Google Scholar] [CrossRef]
- Jothiaruna, N.; Sundar, K.J.A.; Karthikeyan, B. A segmentation method for disease spot images incorporating chrominance in Comprehensive Color Feature and Region Growing. Comput. Electron. Agric. 2019, 165, 104934. [Google Scholar] [CrossRef]
- Hernández-Hernández, J.L.; García-Mateos, G.; González-Esquiva, J.M.; Escarabajal-Henarejos, D.; Ruiz-Canales, A.; Molina-Martínez, J.M. Optimal color space selection method for plant/soil segmentation in agriculture. Comput. Electron. Agric. 2016, 122, 124–132. [Google Scholar] [CrossRef]
- Abdalla, A.; Haiyan, C.H.; El-Manawy, A.; Yong, H. Infield oilseed rape images segmentation via improved unsupervised learning models combined with supreme color features. Comput. Electron. Agric. 2019, 162, 1057–1068. [Google Scholar] [CrossRef]
- Yingli, C.; Yadi, L.; Dianrong, M.; Ang, L.; Tongyu, X. Best Subset Selection Based Rice Panicle Segmentation from UAV Image. Trans. Chin. Soc. Agric. Mach. 2020, 51, 171–177. [Google Scholar] [CrossRef]
- Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
- Huanli, W.; Kewang, C.; Xin, Z.; Xuzhang, X.; Wengang, Z.; Yan, W. Improving Accuracy of Fine Leaf Crop Coverage by Improved K-means Algorithm. Trans. Chin. Soc. Agric. Mach. 2019, 50, 42–50. [Google Scholar] [CrossRef]
- Jun, Z.; Jinrong, Z.; Mingjun, W. Pear Orchard Scene Segmentation Based on Conditional Random Fields. Trans. Chin. Soc. Agric. Mach. 2015, 46, 8–13. [Google Scholar] [CrossRef]
- Reza, M.N.; Na, I.S.; Baek, S.W.; Lee, K.-H. Rice yield estimation based on K-means clustering with graph-cut segmentation using low-altitude UAV images. Biosyst. Eng. 2018, 177, 109–121. [Google Scholar] [CrossRef]
- Tong, P.; Han, P.; Li, S.; Li, N.; Bu, S.; Li, Q.; Li, K. Counting trees with point-wise supervised segmentation network. Eng. Appl. Artif. Intell. 2021, 100, 104172. [Google Scholar] [CrossRef]
- Guo, W.; Rage, U.K.; Ninomiya, S. Illumination invariant segmentation of vegetation for time series wheat images based on decision tree model. Comput. Electron. Agric. 2013, 96, 58–66. [Google Scholar] [CrossRef]
- Chen, Y.; Hou, C.; Tang, Y.; Zhuang, J.; Lin, J.; He, Y.; Guo, Q.; Zhong, Z.; Lei, H.; Luo, S. Citrus Tree Segmentation from UAV Images Based on Monocular Machine Vision in a Natural Orchard Environment. Sensors 2019, 19, 5558. [Google Scholar] [CrossRef]
- Moe, K.T.; Owari, T.; Furuya, N.; Hiroshima, T.; Morimoto, J. Application of UAV Photogrammetry with LiDAR Data to Facilitate the Estimation of Tree Locations and DBH Values for High-Value Timber Species in Northern Japanese Mixed-Wood Forests. Remote Sens. 2020, 12, 2865. [Google Scholar] [CrossRef]
- Cheng, Z.; Qi, L.; Cheng, Y. Cherry Tree Crown Extraction from Natural Orchard Images with Complex Backgrounds. Agriculture 2021, 11, 431. [Google Scholar] [CrossRef]
- Lu, Y.; Young, S. A survey of public datasets for computer vision tasks in precision agriculture. Comput. Electron. Agric. 2020, 178, 105760. [Google Scholar] [CrossRef]
- Yingli, C.; Mingtong, L.; Zhonghui, G.; Wen, X.; Dianrong, M.; Tongyu, X. Unsupervised GMM for Rice Segmentation with UAV Images Based on Lab Color Space. Trans. Chin. Soc. Agric. Mach. 2021, 52, 162–169. [Google Scholar] [CrossRef]
- Zhenzhen, C.; Lijun, Q.; Yifan, C.; Yalei, W.; Hao, Z.; Yu, X. Fruit Tree Canopy Image Segmentation Method Based on M-LP Features Weighted Clustering. Trans. Chin. Soc. Agric. 2020, 51, 191–198. [Google Scholar] [CrossRef]
- Jing-jing, G.; Qing-wu, L.; Hai-su, C.; Chun-chun, Q. Segmentation algorithm of tree image based on L ab color-distance and GMM. Inf. Technol. 2016, 40, 1–4. [Google Scholar] [CrossRef]
- Bradski, G. The OpenCV Library. Dr. Dobbs J. Softw. Tools 2000, 25, 122–125. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar] [CrossRef]
- Selim, S.Z.; Ismail, M.A. K-means-type algorithms: A generalized convergence theorem and characterization of local optimality. IEEE Trans. Pami 1984, 6, 81–87. [Google Scholar] [CrossRef]
- Huijun, X.; Zhong, W.; Liping, M.; Hua, R.; En, H.C. Improved Mini Batch K-Means Time-weighted Recommendation Algorithm. Comput. Eng. 2020, 46, 73–78. [Google Scholar] [CrossRef]
- Yingchang, X.; Wenjing, Y. Application of Mini Batch K-means Algorithm in Remote Sensing Data Classification. Ludong Univ. J. Sci. Ed. 2017, 33, 359–363. [Google Scholar] [CrossRef]
- Boongoen, T.; Iam-On, N. Cluster ensembles: A survey of approaches with recent extensions and applications. Comput. Sci. Rev. 2018, 28, 1–25. [Google Scholar] [CrossRef]
- Strehl, A.; Ghosh, J. Cluster Ensembles—A Knowledge Reuse Framework for Combining Multiple Partitions. Mach. Learn. Res. 2002, 3, 583–617. [Google Scholar] [CrossRef][Green Version]
- Kittler, J.; Hatef, M. On combining classifiers. IEEE Trans. Pattern Anal. 1998, 20, 226–239. [Google Scholar] [CrossRef]
- Topchy, A.P.; Law, M.H.C.; Jain, A.K.; Fred, A.L. Analysis of consensus partition in cluster ensemble. In Proceedings of the Fourth IEEE International Conference on Data Mining (ICDM’04), Brighton, UK, 1–4 November 2004; pp. 225–232. [Google Scholar] [CrossRef]
- Wang, J.; Ma, X.; DUAN, G. Improved K-means clustering k-value selection algorithm. Comput. Eng. Appl. 2019, 55, 27–33. [Google Scholar] [CrossRef]
- Wenjia, L.; Xiaofeng, Z.; Lian, Z. Business Process Clustering Method Based on k-means and Elbow Method. J. Jianghan Univ. 2020, 48, 81–90. [Google Scholar] [CrossRef]
- Yingji, W.; Hongbin, D. Determination of the number of classes based on density peak and elbow method. Appl. Sci. Technol. 2021, 48, 74–79. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, J.; Yuan, D. Automatically Obtaining K Value Based on K-means Elbow Method. Comput. Eng. 2019, 40, 167–170. [Google Scholar] [CrossRef]
- Bauer, E.; Kohavi, R. An empirical comparison of voting classification algorithms: Bagging, boosting, and variants. Mach. Learn. 1999, 36, 105–139. [Google Scholar] [CrossRef]
- Lam, L.; Suen, C.Y. Application of majority voting to pattern recognition: An analysis of its behavior and performance. IEEE Trans. Syst. 1997, 22, 553–568. [Google Scholar] [CrossRef]
- Munkres, J. Algorithms for the assignment and transportation problems. SIAM 1957, 5, 32–38. [Google Scholar] [CrossRef]
- Lijun, Q.; Yifan, C.; Zhenzhen, C.; Zhilun, Y.; Yalei, W.; Luzhen, G. Estimation of Upper and Lower Canopy Volume Ratio of Fruit Trees Based on M-K Clustering. Trans. Chin. Soc. Agric. 2018, 49, 57–64. [Google Scholar] [CrossRef]
- Nikbakhsh, N.; Baleghi, Y.; Agahi, H. Maximum mutual information and Tsallis entropy for unsupervised segmentation of tree leaves in natural scenes. Comput. Electron. Agric. 2019, 162, 440–449. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channels | Indicators | RGB | HSV | Lab | HSI | XYZ | Luv | YCrCb | YUV | I1I2I3 | TSL |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | R | 68.26 | 85.27 | 64.04 | 64.21 | 64.80 | 64.12 | 64.03 | 64.01 | 63.90 | 74.76 |
| P | 79.15 | 87.83 | 68.66 | 52.39 | 73.49 | 71.93 | 71.94 | 68.78 | 72.10 | 80.40 | |
| A | 72.67 | 84.04 | 66.87 | 63.59 | 68.52 | 67.58 | 67.56 | 66.88 | 67.47 | 77.84 | |
| F | 73.30 | 86.53 | 66.27 | 57.70 | 68.87 | 67.80 | 67.75 | 66.31 | 67.75 | 77.48 | |
| 2 | R | 62.11 | 50.59 | 79.51 | 56.51 | 63.54 | 81.02 | 67.86 | 82.04 | 78.07 | 65.36 |
| P | 67.94 | 31.10 | 84.59 | 29.51 | 70.67 | 84.09 | 70.84 | 88.82 | 76.51 | 74.80 | |
| A | 65.16 | 52.94 | 82.36 | 55.84 | 66.87 | 83.12 | 70.28 | 85.47 | 78.68 | 69.23 | |
| F | 64.89 | 38.52 | 81.97 | 38.78 | 66.92 | 82.53 | 69.32 | 85.30 | 77.28 | 69.76 | |
| 3 | R | 60.06 | 64.49 | 67.60 | 63.91 | 60.59 | 68.33 | 82.64 | 64.66 | 70.82 | 63.95 |
| P | 65.46 | 73.63 | 78.79 | 72.12 | 66.17 | 72.37 | 87.89 | 72.49 | 75.80 | 72.20 | |
| A | 62.98 | 68.27 | 72.04 | 67.48 | 63.55 | 71.00 | 83.41 | 68.17 | 73.71 | 67.53 | |
| F | 62.65 | 68.76 | 72.77 | 67.77 | 63.26 | 70.29 | 85.18 | 68.35 | 73.22 | 67.83 | |
| 12 | R | 66.31 | 84.84 | 80.20 | 63.16 | 64.24 | 79.35 | 72.43 | 80.34 | 77.12 | 74.99 |
| P | 75.33 | 87.97 | 86.87 | 53.11 | 72.26 | 85.90 | 76.87 | 89.98 | 82.01 | 80.03 | |
| A | 70.15 | 86.86 | 83.60 | 63.05 | 67.75 | 82.72 | 75.17 | 84.80 | 79.92 | 77.89 | |
| F | 70.53 | 86.38 | 83.40 | 57.70 | 68.01 | 82.49 | 74.59 | 84.88 | 79.49 | 77.43 | |
| 13 | R | 66.12 | 82.32 | 71.79 | 65.28 | 63.26 | 72.56 | 79.40 | 69.85 | 74.34 | 74.85 |
| P | 75.20 | 84.16 | 75.27 | 74.64 | 70.75 | 77.00 | 85.87 | 72.42 | 81.68 | 78.74 | |
| A | 69.98 | 83.93 | 74.27 | 69.15 | 66.67 | 75.28 | 82.74 | 72.10 | 77.95 | 77.37 | |
| F | 70.37 | 83.23 | 73.49 | 69.65 | 66.80 | 74.72 | 82.51 | 71.11 | 77.84 | 76.74 | |
| 23 | R | 61.08 | 64.18 | 83.07 | 63.30 | 62.28 | 82.98 | 80.98 | 81.75 | 80.67 | 64.78 |
| P | 66.93 | 73.09 | 86.01 | 69.39 | 68.81 | 83.35 | 83.52 | 88.17 | 80.87 | 73.37 | |
| A | 64.10 | 67.89 | 85.06 | 66.42 | 65.45 | 82.82 | 82.89 | 85.06 | 81.73 | 68.47 | |
| F | 63.87 | 68.34 | 84.52 | 66.21 | 65.38 | 83.16 | 82.23 | 84.84 | 80.77 | 68.80 | |
| 123 | R | 64.99 | 82.08 | 82.19 | 64.59 | 63.38 | 79.58 | 79.57 | 80.08 | 79.07 | 71.91 |
| P | 73.15 | 83.79 | 87.66 | 71.87 | 70.75 | 84.97 | 85.32 | 88.90 | 84.12 | 77.16 | |
| A | 68.61 | 83.64 | 85.05 | 67.98 | 66.74 | 82.52 | 82.65 | 84.26 | 81.93 | 74.89 | |
| F | 68.83 | 82.93 | 84.83 | 68.04 | 66.87 | 82.19 | 82.35 | 84.26 | 81.52 | 74.44 |
| Algorithm | Weather | P | Means of P | R | Means of R | F1 | Means of F1 | Time |
|---|---|---|---|---|---|---|---|---|
| K-means | sunny | 93.05% | 95.17% | 64.98% | 71.91% | 76.52% | 80.78% | 7.1 s |
| cloudy | 96.84% | 75.83% | 85.05% | |||||
| GMM | sunny | 93.35% | 94.56% | 73.09% | 73.55% | 81.98% | 82.63% | 51.4 s |
| cloudy | 95.76% | 74.00% | 83.27% | |||||
| The proposed method | sunny | 94.29% | 95.30% | 81.15% | 84.45% | 87.22% | 89.53% | 7.9 s |
| cloudy | 96.31% | 87.75% | 91.83% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Z.; Qi, L.; Zhang, H.; Wan, J.; Zhou, J. Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment. Agriculture 2022, 12, 1039. https://doi.org/10.3390/agriculture12071039
Lu Z, Qi L, Zhang H, Wan J, Zhou J. Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment. Agriculture. 2022; 12(7):1039. https://doi.org/10.3390/agriculture12071039
Chicago/Turabian StyleLu, Zhongao, Lijun Qi, Hao Zhang, Junjie Wan, and Jiarui Zhou. 2022. "Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment" Agriculture 12, no. 7: 1039. https://doi.org/10.3390/agriculture12071039
APA StyleLu, Z., Qi, L., Zhang, H., Wan, J., & Zhou, J. (2022). Image Segmentation of UAV Fruit Tree Canopy in a Natural Illumination Environment. Agriculture, 12(7), 1039. https://doi.org/10.3390/agriculture12071039