
The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester

Abstract
:1. Introduction
2. Overall Design of the Ratooning Rice Harvester
2.1. Design Requirement
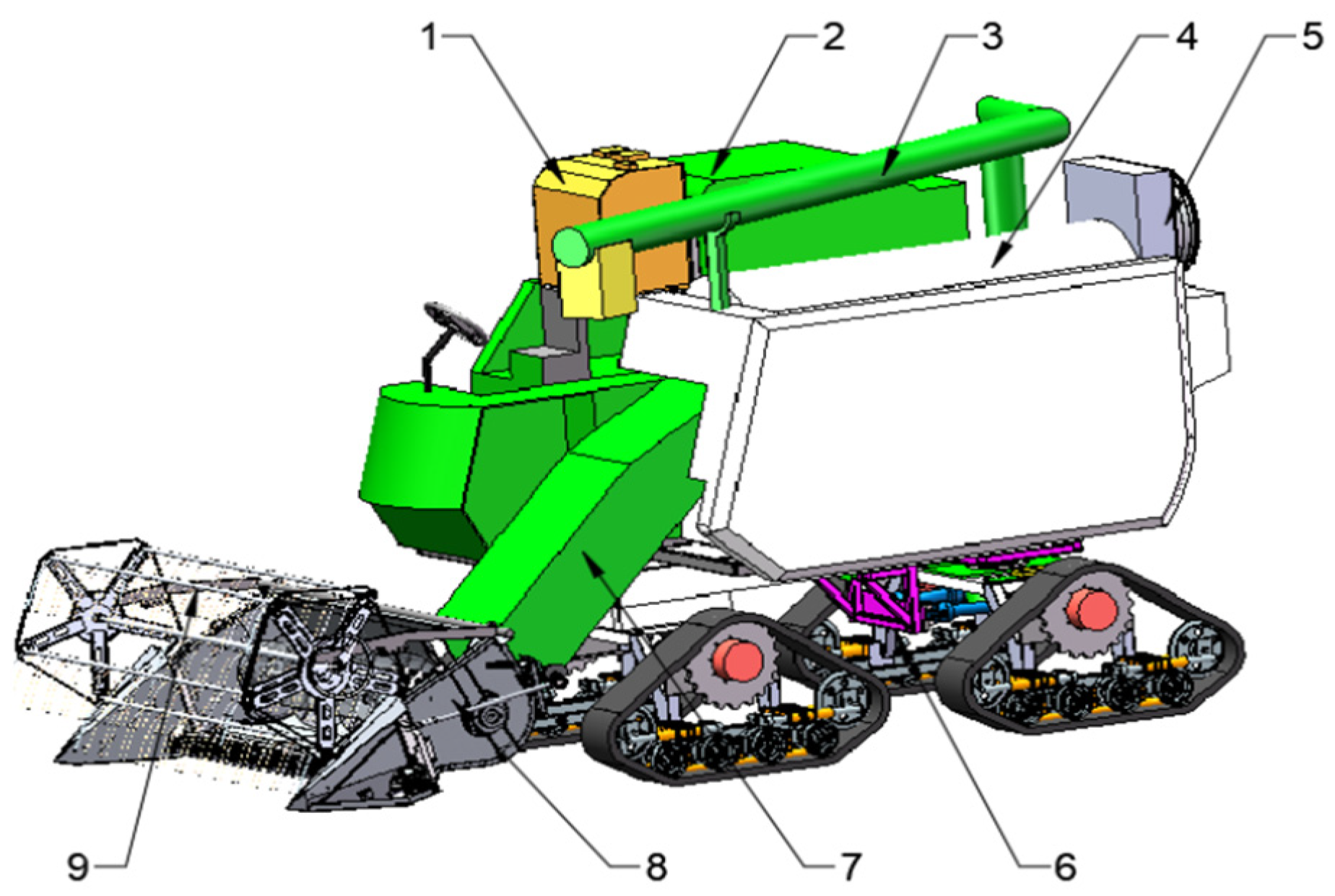
2.2. Overall Structure and Working Principle
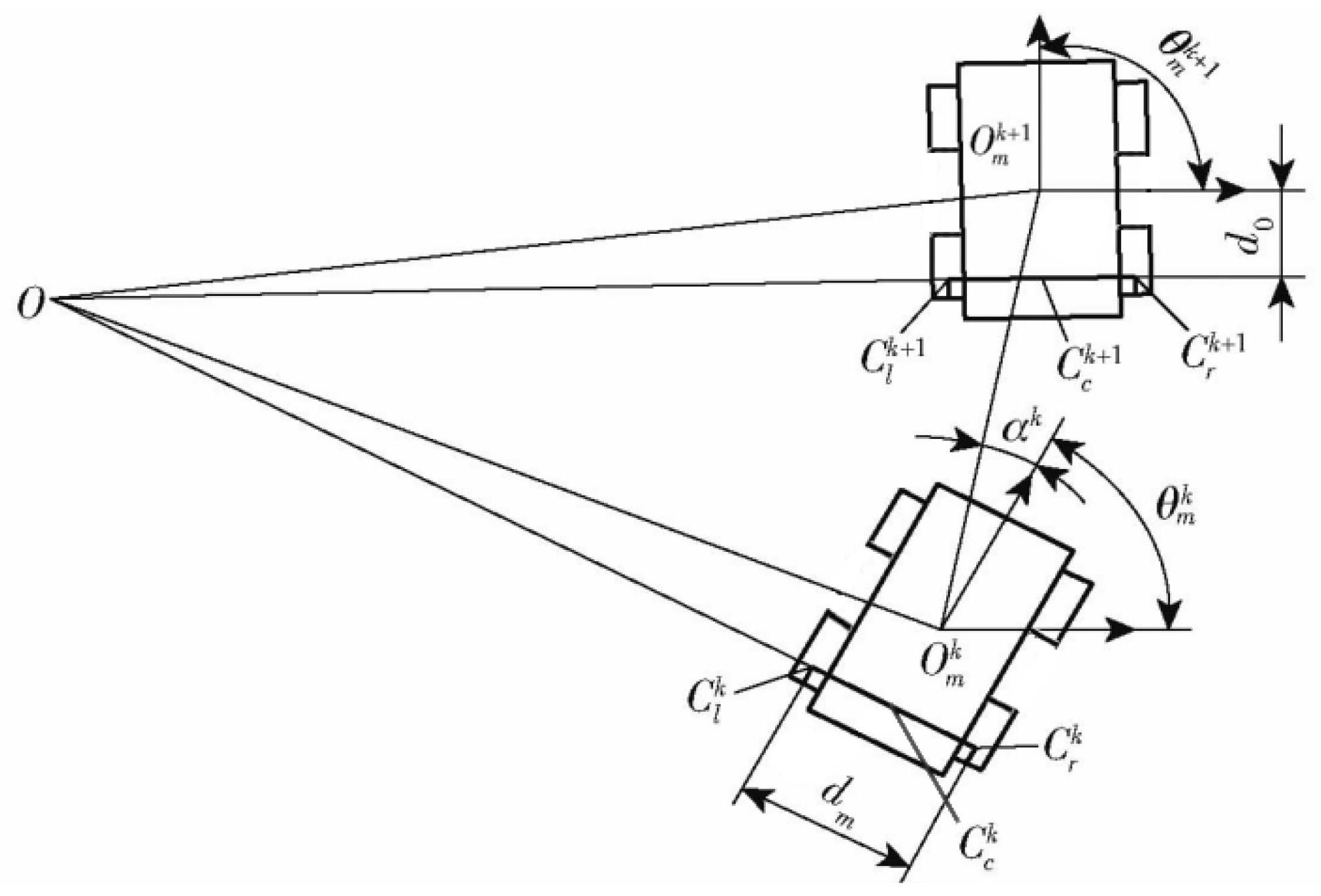
2.3. Kinematic Analysis of a Triangular Crawler Chassis
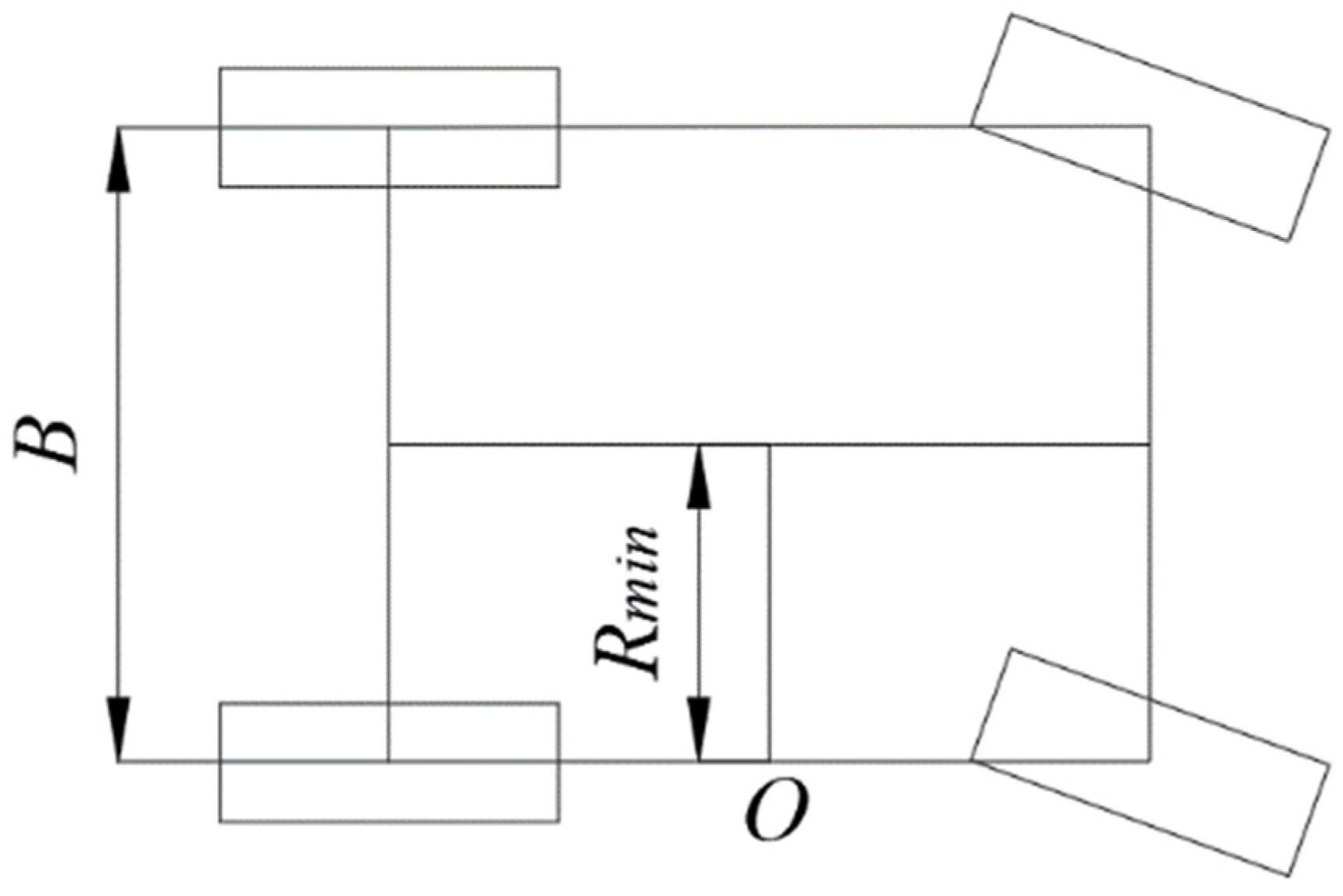
2.4. Theoretical Analysis of Steering Performance
2.5. Tension Calculation of Triangular Crawler
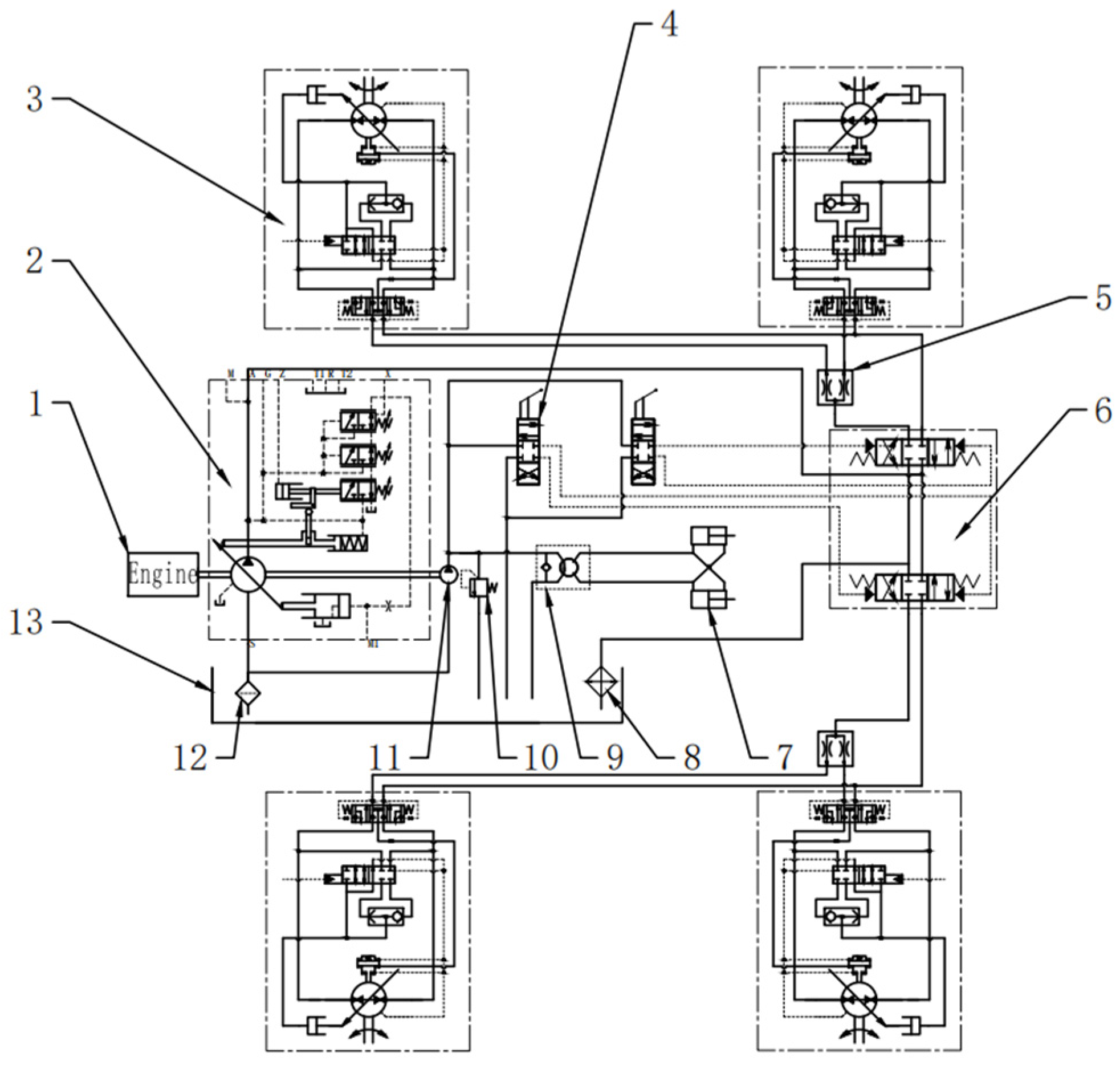
3. Hydraulic System Design
3.1. Hydraulic Schematic Diagram
3.2. Calculation and Selection of Main Hydraulic Components
3.2.1. Calculation of Hydraulic Traveling Motor
3.2.2. Calculation of Hydraulic Pump
3.2.3. Engine Calculation
3.3. Hydraulic System Simulation
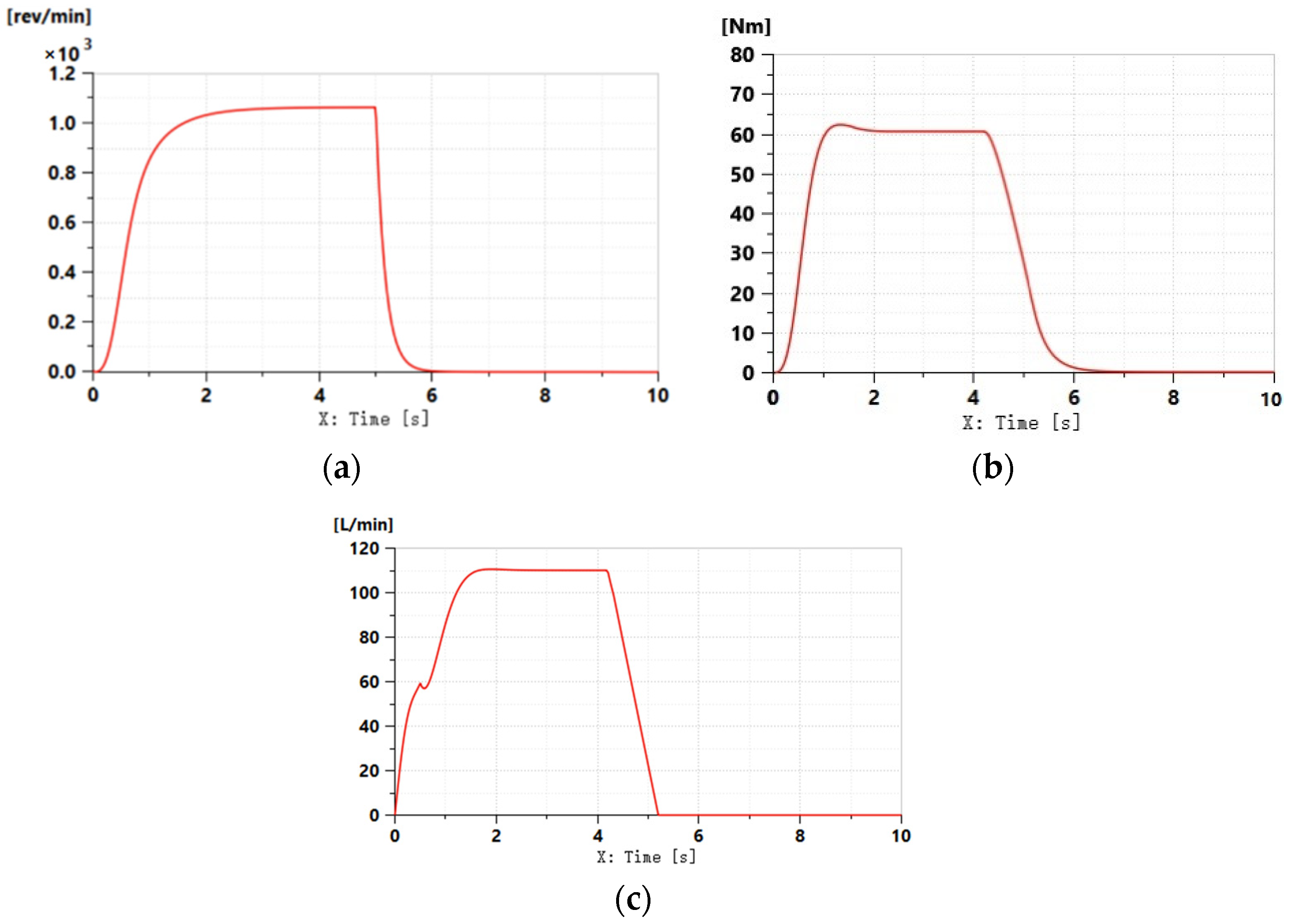
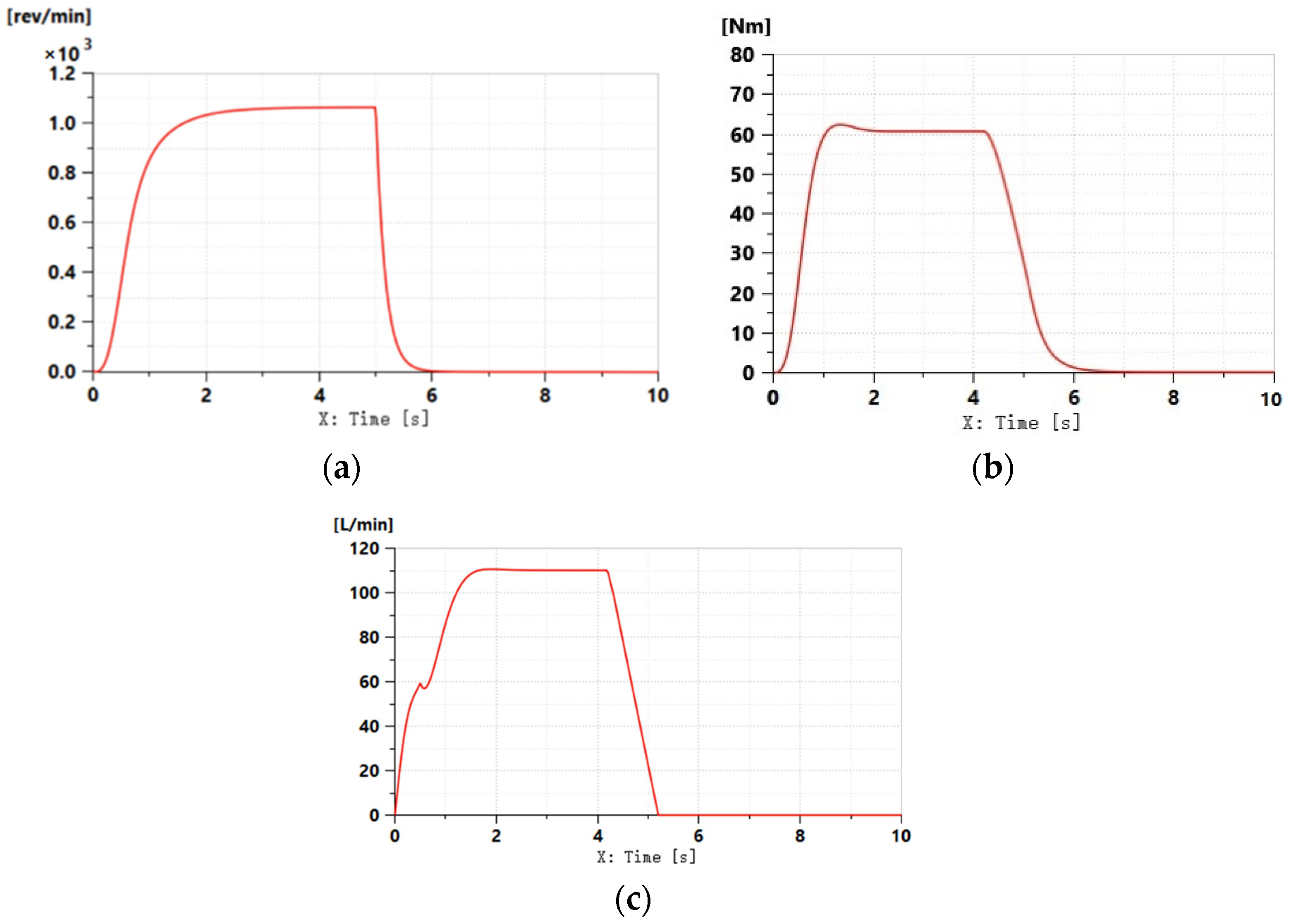
3.3.1. Simulation of Hydraulic System when Driving in a Straight Line
3.3.2. Simulation of Hydraulic System during Braking of the Ratooning Rice Harvester
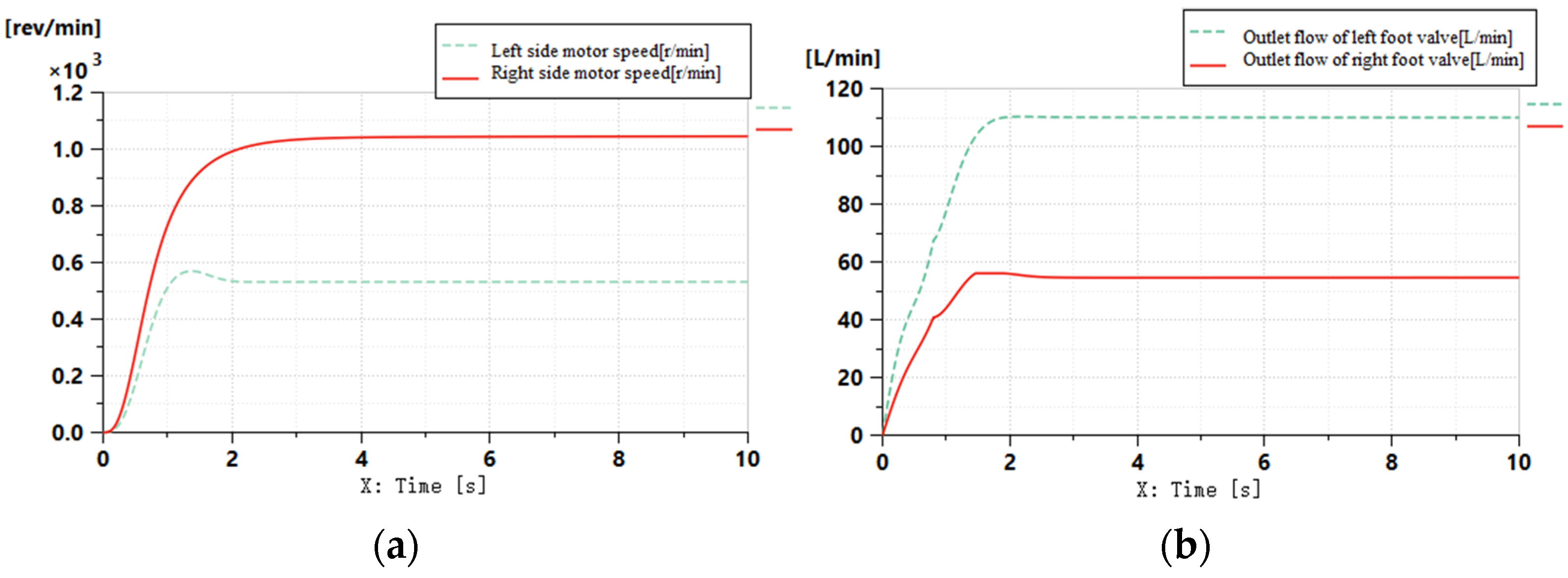
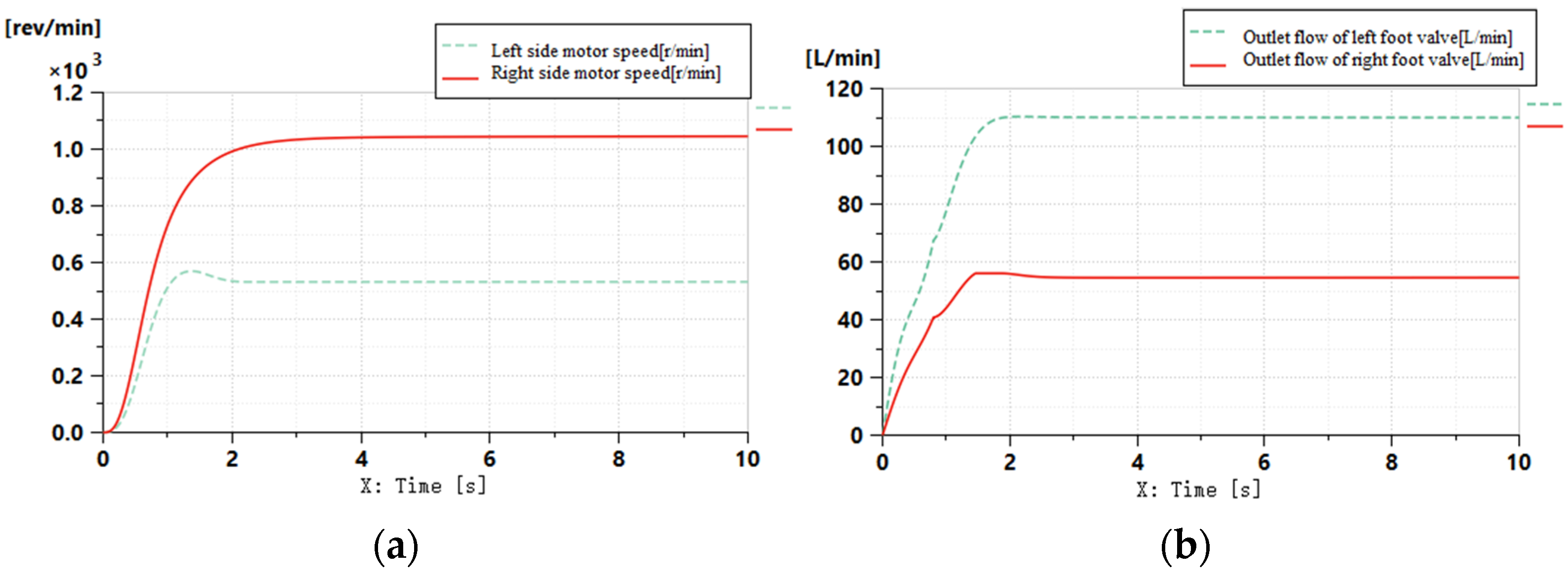
3.3.3. Simulation of Hydraulic System in Field Turning
4. Model Establishment
4.1. Establishment of the Pavement Spectrum Model
4.2. Simulation Analysis of Straight Line Driving in Field
5. Analysis of Simulation Results
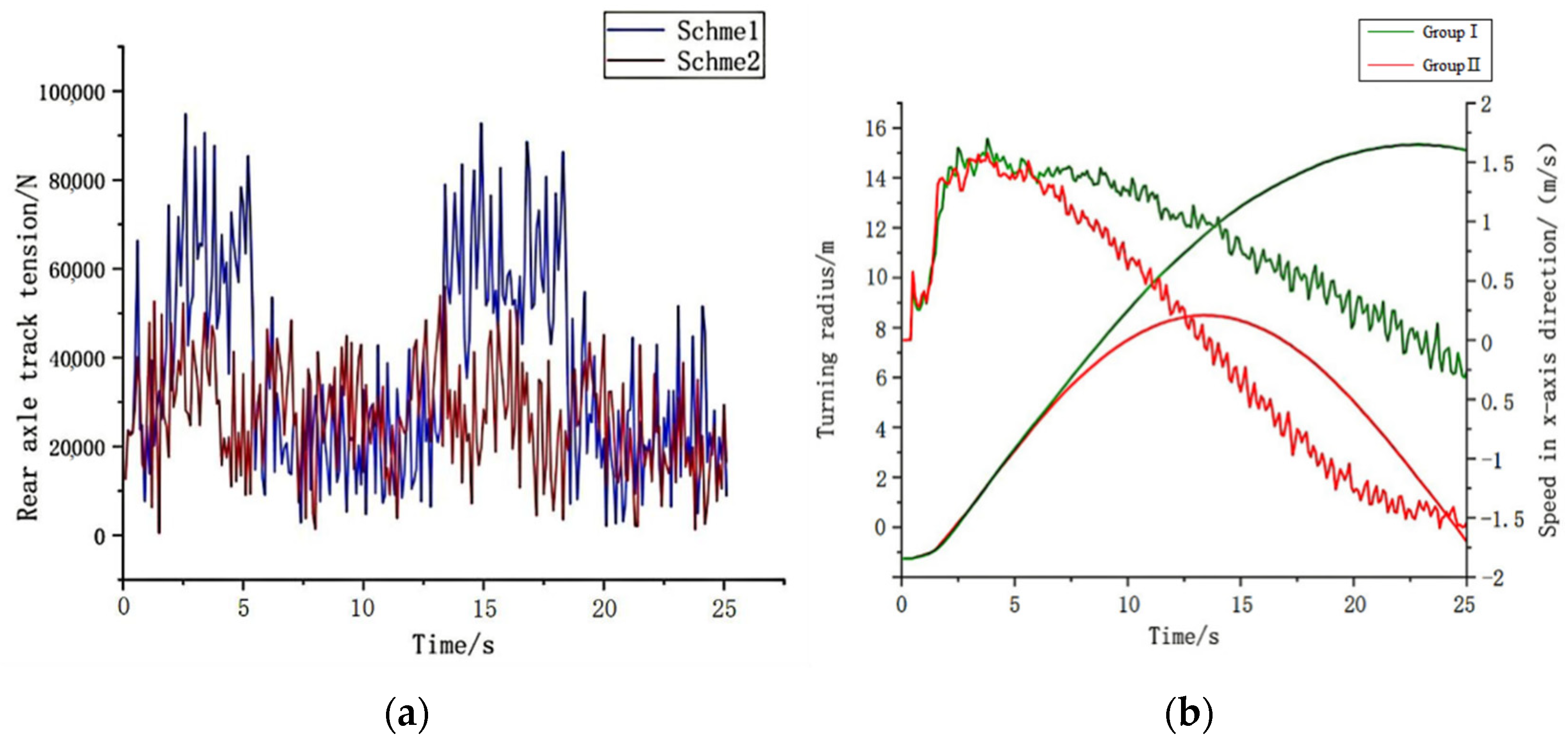
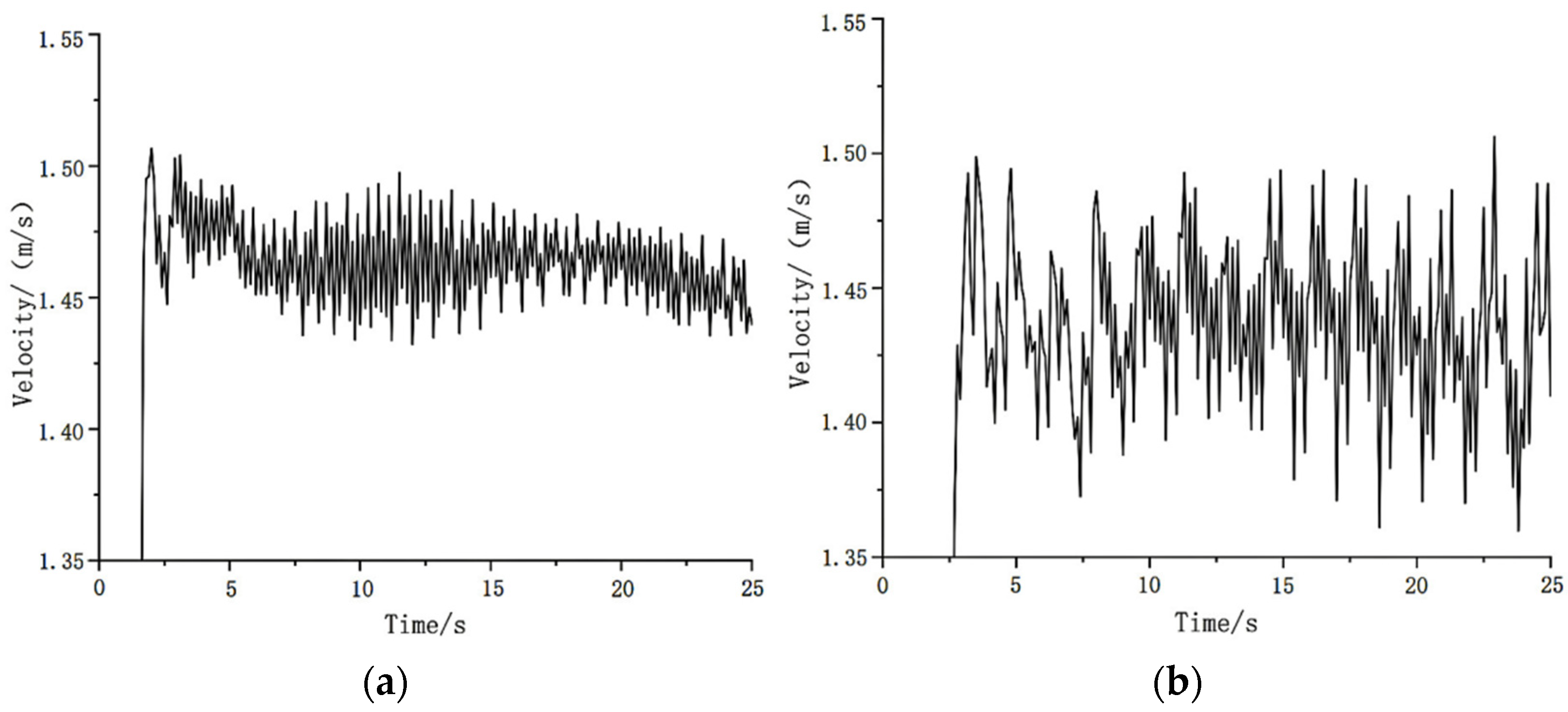
5.1. Simulation Analysis of Straight Line Driving in Field
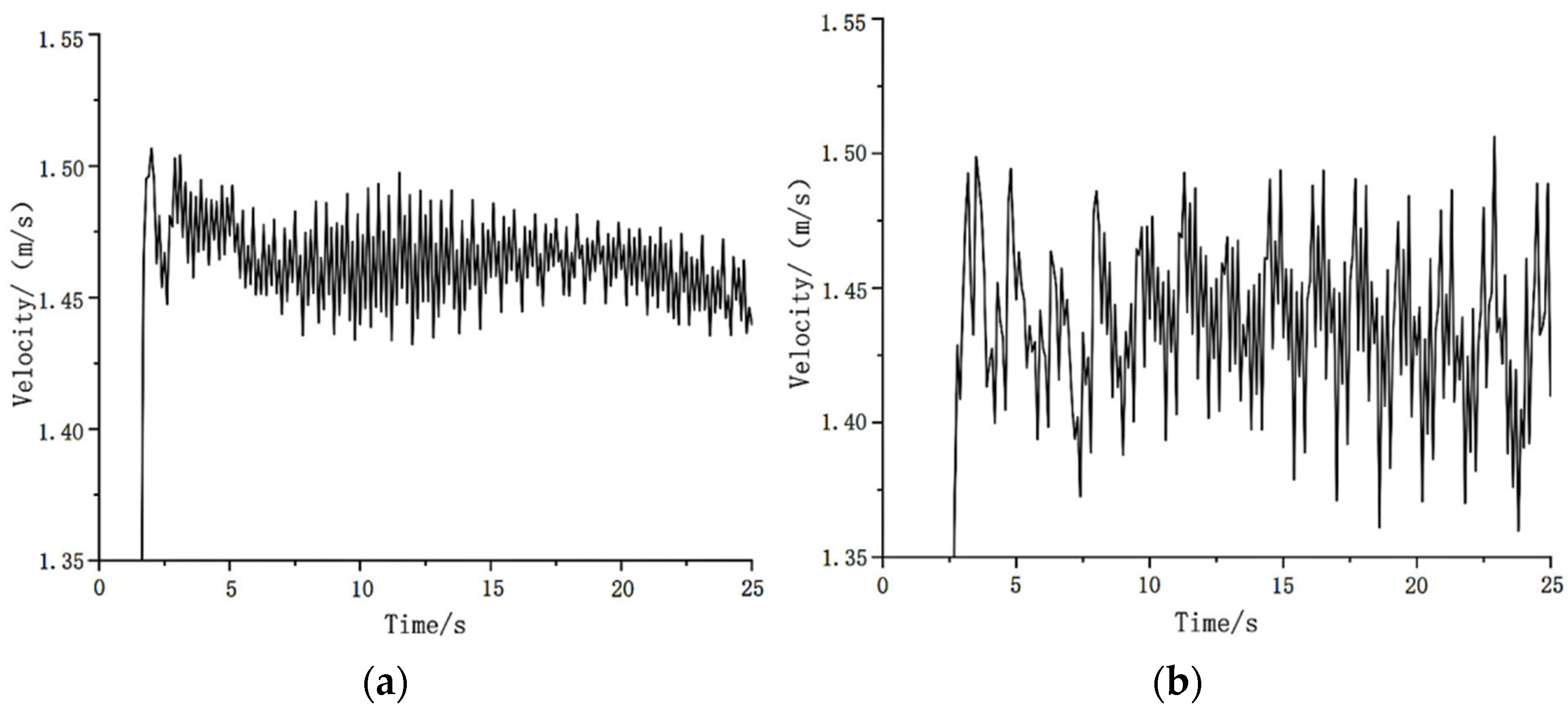
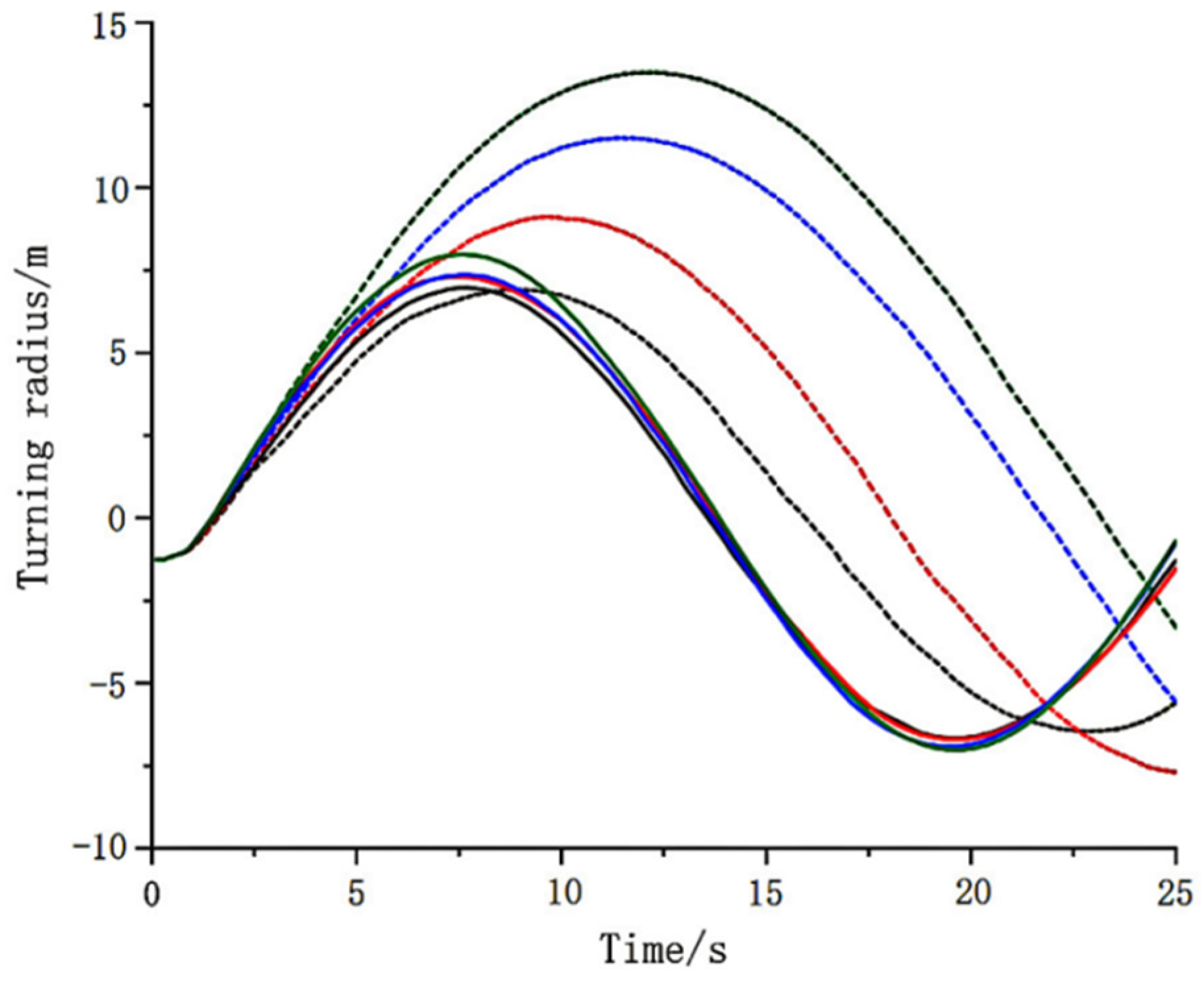
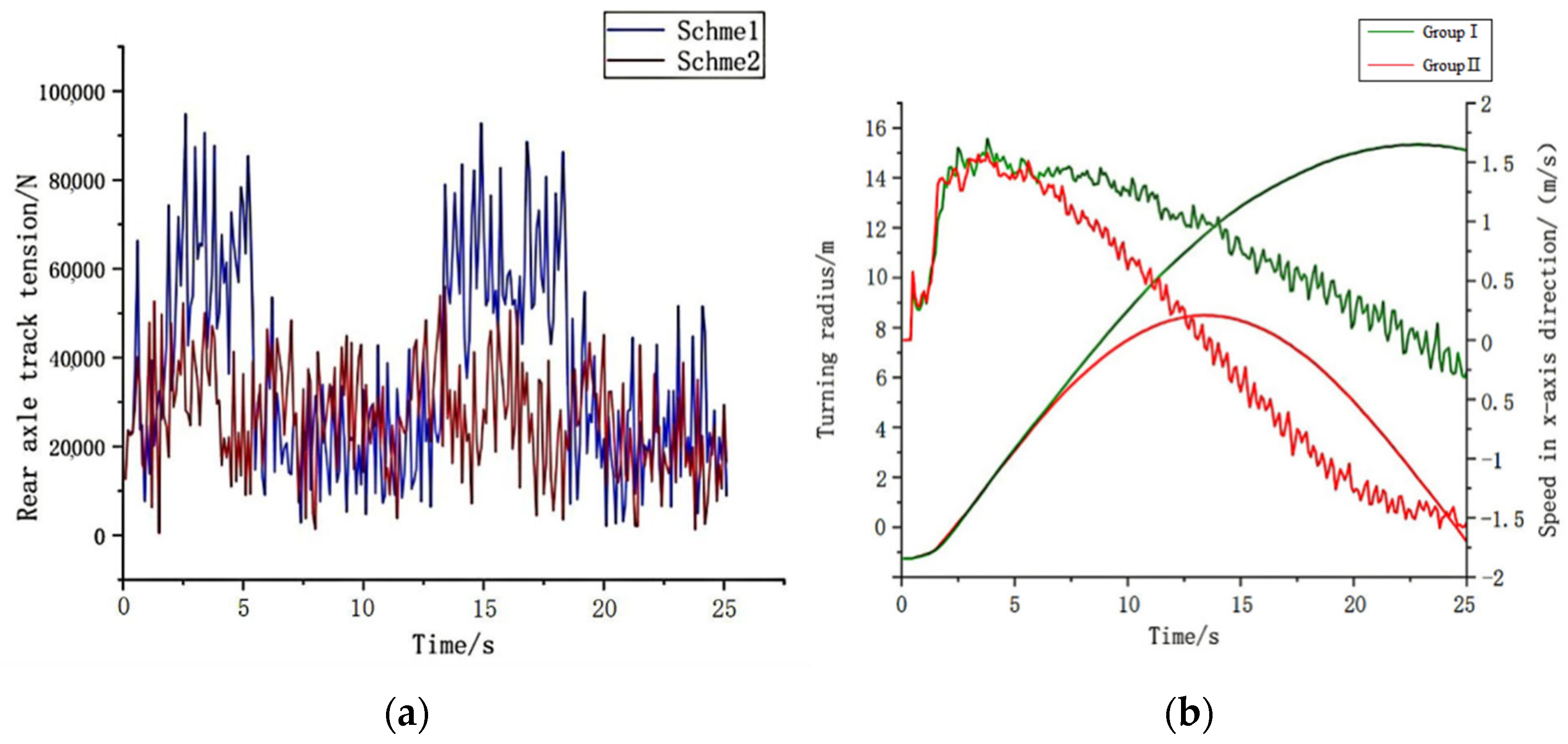
5.2. Field Turning Simulation Analysis
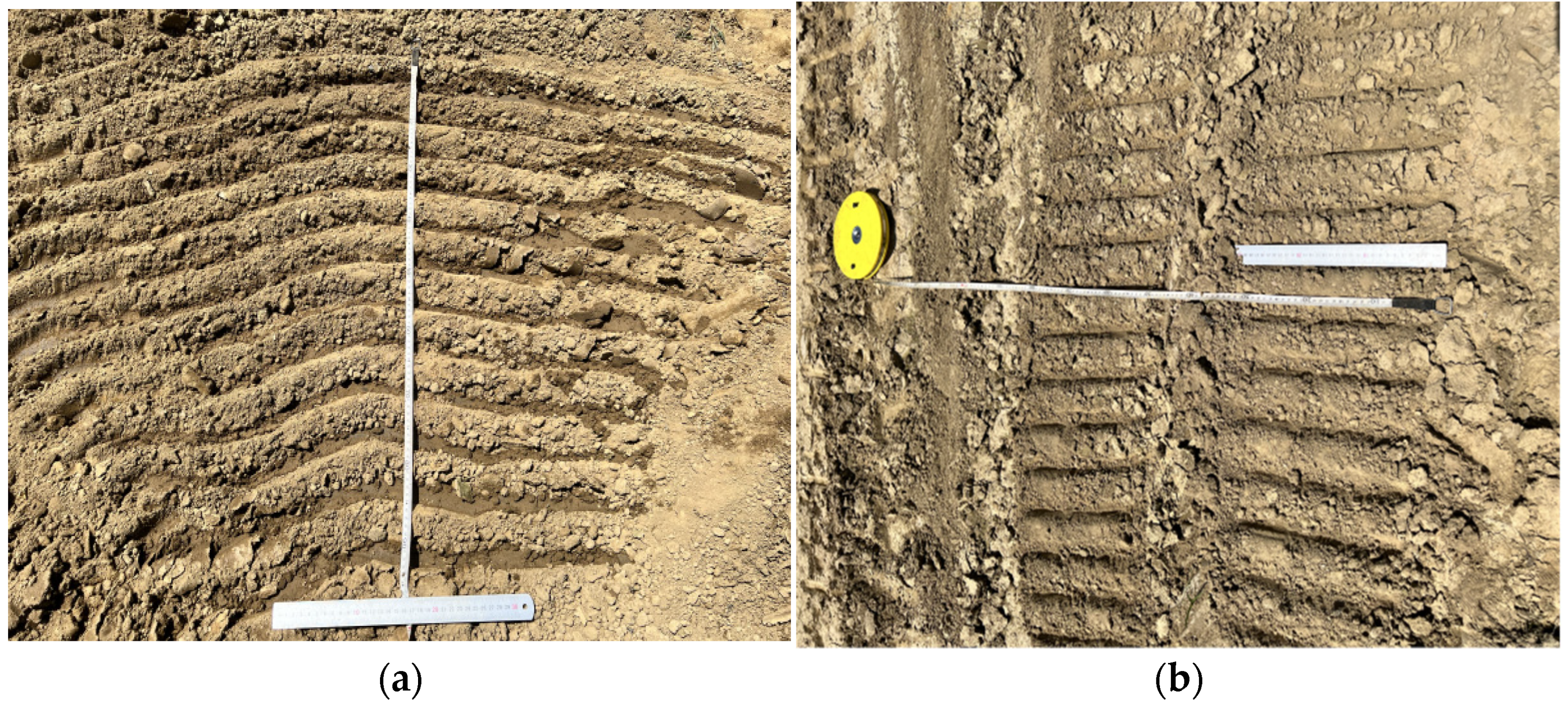
6. Field Experiment
6.1. Test Conditions
6.2. Test Method
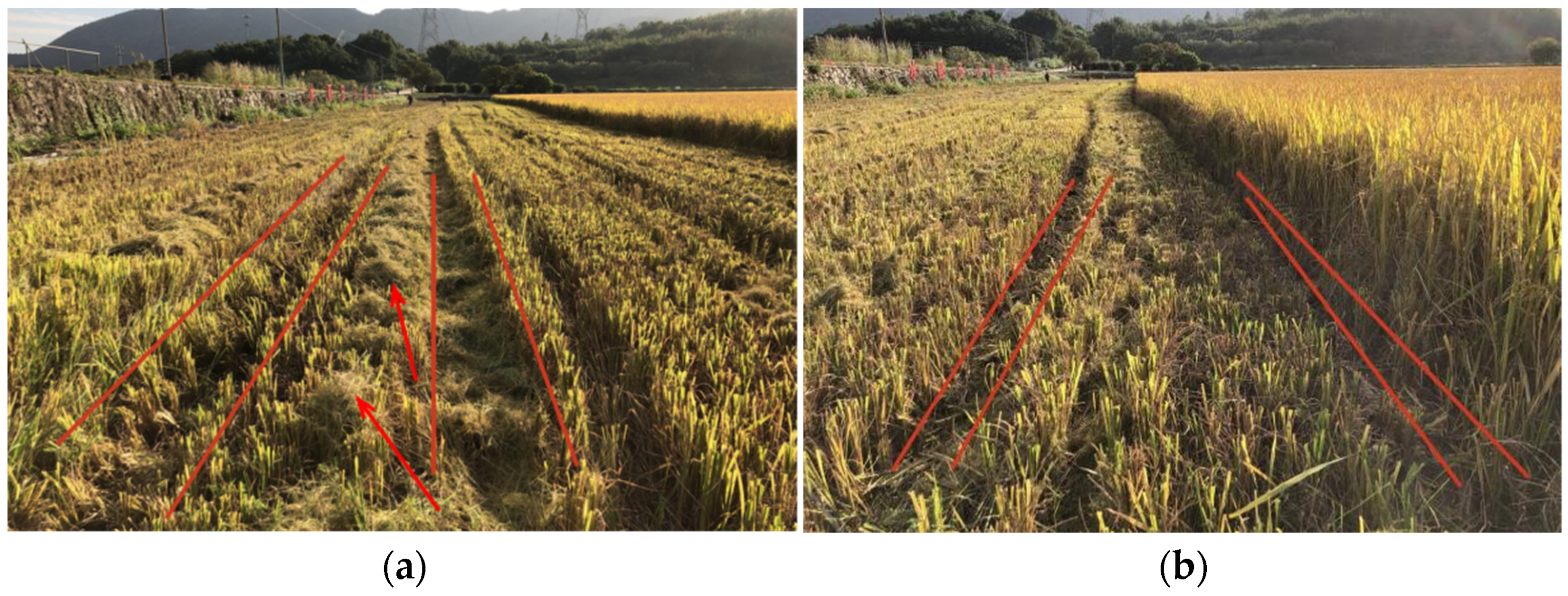
6.3. Test Results and Analysis
7. Conclusions
- (1)
- The triangular crawler chassis of the ratooning rice harvester is studied and designed in combination with the planting method of ratooning rice in South China and describes and analyzes the overall chassis structure over the working operating principle. The whole machine adopts an entire hydraulic drive, with a minimum ground clearance of 600 mm. The triangular track wheel is equipped with a 260 mm wide track to meet high clearance requirements, low rolling, good trafficability, flexible steering, and simple operation.
- (2)
- The hydraulic drive system is designed. The hydraulic drive system uses a variable pump. The variable motor relies on the gear shunt motor to ensure the synchronization of hydraulic travel motors on both sides and uses a foot valve to flexibly control the hydraulic travel motor’s rotation direction and rotation time on either side. Combined with rear-axle steering, the turning radius is small.
- (3)
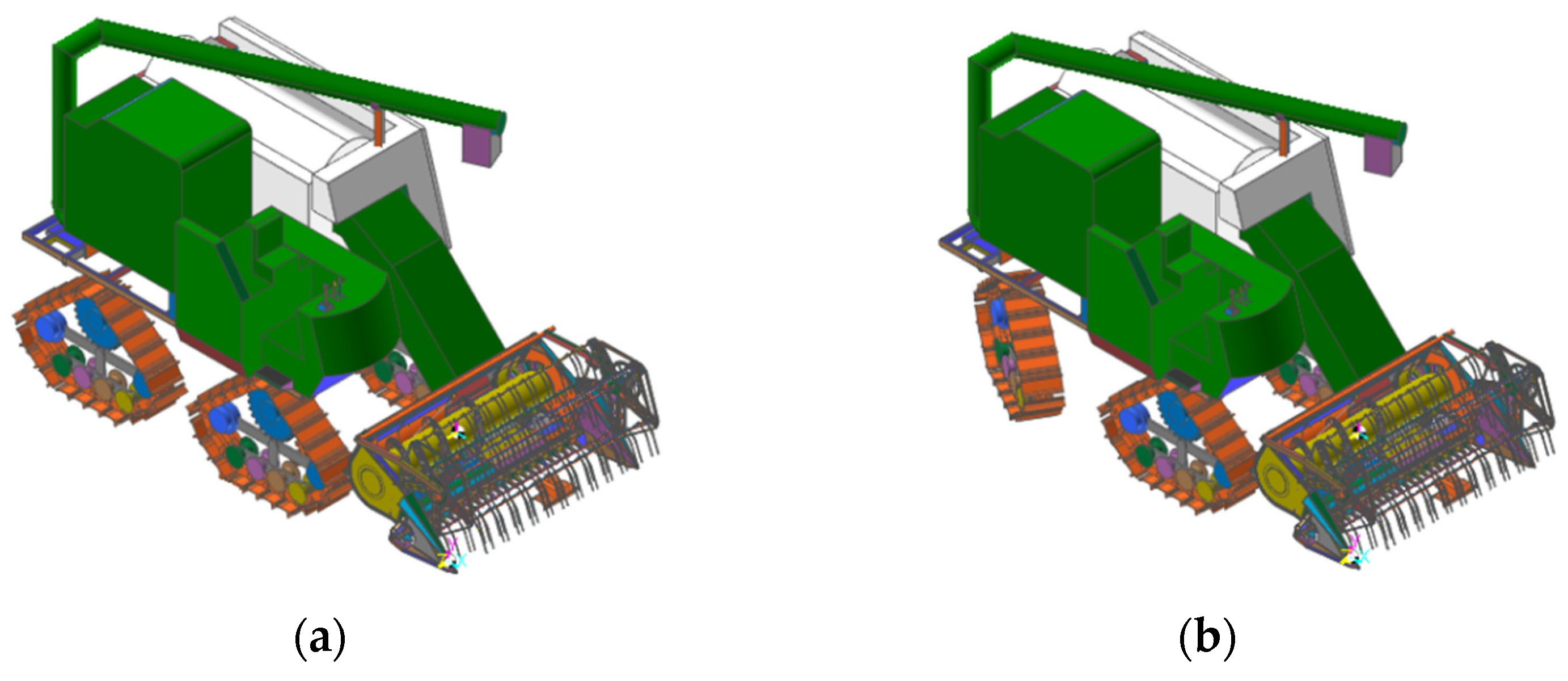
- The force and motion relationship between various components is analyzed by taking the chassis of a triangular crawler ratooning rice harvester as the research object. A combination of theoretical analysis, modelling simulation, and field testing investigates a triangular crawler’s dynamic characteristics. Model simulation and test verification of differential steering chassis and rear-axle steering chassis are performed based on the harmonic superposition method. The results show that the rear-axle steering chassis has a lower rolling rate and smaller turning radius. The multi-body dynamic model of the chassis of the triangular crawler ratooning rice harvester has high accuracy, which can be used for theoretical simulation analysis and provide a reference for the dynamic analysis and optimization of the crawler chassis.
- (4)
- The field test results show that the rear axle steering chassis can effectively reduce the rolling rate. The operation speed of the machine can reach 2.8 km/h, and the straight rolling rate is only 26.8%. Compared with the traditional crawler rice combine harvester, it has a smaller turning radius and better operation efficiency, and the rolling rate is reduced by 26.1%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, M.; Wang, Z.; Luo, X.; Guo, W. Review of precision rice hill-drop drilling technology and machine for paddy. Int. J. Agric. Biol. Eng. 2018, 11, 1–11. [Google Scholar] [CrossRef]
- Harrell, D.L.; Bond, J.A.; Blanche, S. Evaluation of main-crop stubble height on ratoon rice growth and development. Field Crops Res. 2009, 114, 396–403. [Google Scholar] [CrossRef]
- Dong, H.; Chen, Q.; Wang, W.; Peng, S.; Huang, J.; Cui, K.; Nie, L. The growth and yield of a wet-seeded rice-ratoon rice system in central China. Field Crops Res. 2017, 208, 55–59. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, C.; Xiao, S.; Sun, Y.; Huang, J.; Peng, S. Agronomic responses of ratoon rice to nitrogen management in central China. Field Crops Res. 2019, 241, 107569. [Google Scholar] [CrossRef]
- Yuan, S.; Cassman, K.; Huang, J.; Peng, S.; Grassini, P. Can ratoon cropping improve resource use efficiencies and profitability of rice in central China. Field Crops Res. 2019, 234, 66–72. [Google Scholar] [CrossRef]
- Wang, W.; He, A.; Jiang, G.; Sun, H.; Jiang, M.; Man, J.; Ling, X.; Cui, K.; Huang, J.; Peng, S.; et al. Ratoon rice technology: A green and resource-efficient way for rice production. Adv. Agron. 2020, 159, 135–167. [Google Scholar]
- Alizadeh, M.R.; Habibi, F. A comparative study on the quality of the main and ratoon rice crops. J. Food Qual. 2016, 39, 669–674. [Google Scholar] [CrossRef]
- Yu, X.; Yuan, S.; Tao, X. Comparisons between main and ratoon crops in resource use efficiencies, environmental impacts, and economic profits of rice ratooning system in central China. Sci. Total Environ. 2021, 799, 149–246. [Google Scholar] [CrossRef]
- Liu, W.; Luo, X.; Zeng, S.; Wen, Z.; Zeng, L. Study on field turning mechanism and performance test of crawler ratooning rice harvester. J. Jilin Univ. Eng. Technol. Ed. 2022, 234, 1–12. [Google Scholar]
- Zhang, G.; Zhang, Y.; Huang, J. Designing and performance testing a novel head spike harvester of ratoon rice. J. Huazhong Agric. Univ. 2016, 35, 131–136. [Google Scholar]
- Fu, J.; Zhang, G.; Xie, G.; Wang, Y.; Gao, Y.; Zhou, Y. Development of double-channel feeding harvester for ratoon rice. Trans. Chin. Soc. Agric. Eng. 2020, 36, 11–20. [Google Scholar]
- Lei, Z.; Zhang, G.; Peng, S. Simulation and analysis of the stubble pushing rate by chassis of the completely tracked harvester for the ratoon rice. J. Anhui Agric. Univ. 2017, 44, 738–743. [Google Scholar]
- Yang, J.; Zhou, X.; Wei, Y.; Gong, Y. Test Bed Modeling and Control Method for Track Vehicle. Trans. Chin. Soc. Agric. Mach. 2013, 44, 8–13. [Google Scholar]
- Li, Y.; Chen, J.; Liang, Z.; Ma, X.; Jiang, X. Design and Experiment of Differential Steering Mechanism for Track Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2016, 47, 127–134. [Google Scholar]
- Ding, Z.; Li, Y.; Tang, Z. Compaction effects of wheeled vehicles and tracked on farmland soil. Trans. Chin. Soc. Agric. Eng. 2020, 36, 10–18. [Google Scholar]
- Liang, Z.; Li, J.; Liang, J.; Shao, Y.; Zhou, T.; Zeng, Y.; Li, Y. Investigation into experimental and DEM simulation of guide blade optimum arrangement in Multi-Rotor combine harvesters. Agriculture 2022, 12, 435. [Google Scholar] [CrossRef]
- Zhu, Z.; Yang, Y.; Wang, D.; Cai, Y.; Lai, L. Energy saving performance of agricultural tractor equipped with Mechanic-Electronic-Hydraulic powertrain system. Agriculture 2022, 12, 436. [Google Scholar] [CrossRef]
- Renius, K.T.; Resch, R. Continuously Variable Tractor Transmissions; American Society of Agricultrual Engineers: St. Joseph, MI, USA, 2005. [Google Scholar]
- Yu, J.; Cao, Z.; Cheng, M.; Pan, R. Hydro-mechanical power split transmissions: Progress evolution and future trends. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 727–739. [Google Scholar] [CrossRef]
- Li, B.; Sun, D.; Hu, M.; Zhou, X.; Wang, D.; Xia, Y.; You, Y. Automatic gear-shifting strategy for fuel saving by tractors based on real-time identification of draught force characteristics. Biosyst. Eng. 2020, 193, 46–61. [Google Scholar] [CrossRef]
- Wan, L.; Dai, H.; Zeng, Q.; Sun, Z.; Tian, M. Characteristic analysis and co-validation of hydro-mechanical continuously variable transmission based on the wheel loader. Appl. Sci. 2020, 10, 5900. [Google Scholar] [CrossRef]
- Wong, J.; Chiang, C. A general theory for skid steering of tracked vehicl. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Wong, J.; Huang, W. “Wheels vs. Tracks”—A fundamental evaluation from the traction perspective. J. Terramech. 2006, 43, 27–42. [Google Scholar] [CrossRef]
- Ataur, R.; Azmi, Y.; Mohd, Z. Design parameters optimization simulation of a prototype segmented rubber track vehicle for Sepang peat in Malaysia. Am. J. Appl. Sci. 2005, 2, 655–671. [Google Scholar]
- Huang, J.; Dong, Z.; Quan, L.; Jin, Z.; Lan, Y.; Wang, Y. Development of a dual displacement controlled circuit for hydraulic shovel swing motion. Autom. Constr. 2015, 57, 166–174. [Google Scholar] [CrossRef]
- Yang, R.; Wang, Z.; Shang, S.; Zhang, J.; Yi, R.; Zha, X. The Design and Experimentation of EVPIVS-PID Harvesters Header Height Control System Based on Sensor Ground Profiling Monitoring. Agriculture 2022, 12, 282. [Google Scholar] [CrossRef]
- Jin, Y.; Yuan, Y.; Zhu, L.; Wang, D.; Zhao, B.; Fang, X. Design and optimization of an automatic hydraulic steer-by-wire system for an agricultural chassis. Int. J. Agric. Biol. Eng. 2022, 15, 132–138. [Google Scholar] [CrossRef]
- Guo, Z.; Yuan, S.; Jing, C.; Wei, C. Modeling and simulation of shifting process in hydraulic machinery stepless transmission based on AMESim. Trans. Chin. Soc. Agric. Eng. 2009, 25, 86–91. [Google Scholar]
- Kim, J.; Lee, J.; Kim, K. Numerical study on the effects of fuel viscosity and density on the injection rate performance of a solenoid diesel injector based on AMESim. Fuel 2019, 256, 115912. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, T.; Xie, N.; Liang, J. Multi-body dynamic modeling and verification of small agricultural crawler chassis. Trans. Chin. Soc. Agric. Eng. 2019, 35, 39–46. [Google Scholar]
- Chen, G.; Zhang, W.; Yu, B. Multibody dynamics modeling of electromagnetic direct-drive vehicle robot driver. Int. J. Adv. Robot. Syst. 2017, 14, 172988141773189. [Google Scholar] [CrossRef]
- Hu, K.; Zhang, W.; Li, K.; Liu, H.; Qi, B. Multi-body Dynamics Modeling and Experiment of Triangular Tracked Chassis with High Ground Clearance. Trans. Chin. Soc. Agric. Mach. 2021, 52, 386–394. [Google Scholar]
- Pan, G.; Yang, F.; Sun, J.; Liu, Z. Analysis and Test of Obstacle Negotiation Performance of Small Hillside Crawler Tractor during Climbing Process. Trans. Chin. Soc. Agric. Mach. 2020, 51, 374–383. [Google Scholar]
- Gao, Q.; Pan, D.; Zhang, X.; Deng, F.; Huang, D.; Wang, L. Design and Simulation of Entire Track Modular Unmanned Agricultural Power Chassis. Trans. Chin. Soc. Agric. Mach. 2021, 51, 561–570. [Google Scholar]
- Liu, P.; Wang, Z.; Li, H.; Zhang, S.; Wei, W. Design and Overcoming Obstacles Ability Research of Tracked Driving Chassis with Planetary Structure. Trans. Chin. Soc. Agric. Mach. 2014, 45, 17–23. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Overall dimension (L × W × H)/(mm × mm × mm) | 5300 × 2680 × 3150 |
| Mass/(kg) | 4500 |
| Power/(kW) | 74.5 |
| Driving mode | Four wheel drive |
| Track width/mm | 1500 |
| Wheelbase/mm | 1800 |
| Track width/mm | 260 |
| Track grounding length/mm | 800 |
| Minimum ground clearance/mm | 600 |
| Displacement (mL/r) | Theoretical Output Speed (r/min) | Maximum Working Pressure (MPa) | Maximum Output Torque (N·m) |
|---|---|---|---|
| 738/1265 | 54.18/31.6 | 21 | 4200 |
| Displacement (mL/r) | Nominal Pressure (MPa) | Peak Pressure (MPa) | Limit Speed (r/min) |
|---|---|---|---|
| 85 | 35 | 40 | 2500 |
| Type | Parameter | Value |
|---|---|---|
| Solid pavement | Ground stiffness/(N·m−1) | 10,000 |
| Damping coefficient/(N·s·m−1) | 10.004 | |
| Maximum friction coefficient | 0.45 | |
| Pavement deformation index | 2 | |
| Field pavement | Cohesion modulus KC/(kN/mn+1) | 42.538 |
| Internal friction modulus KΦ/(kN/mn+2) | 9.004 | |
| Soil deformation index | 0.8227 | |
| Soil moisture content/% | 37.3 | |
| Soil firmness/kPa | 93.5 |
| Parameter | Simulation Results | Test Results | Technical Requirement |
|---|---|---|---|
| Driving speed/(km·h−1) | 0–4.5 | 0–4.5 | 0–4.5 |
| Operating speed/(km·h−1) | 0–2.8 | 0–2.8 | 0–2.8 |
| Minimum turning radius/mm | 748 | 785 | ≤900 |
| Maximum climbing angle/(°) | 233 | 215 | ≥150 |
| Maximum ridge crossing height/mm | 0–4.5 | 0–4.5 | 0–4.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Luo, X.; Zeng, S.; Zeng, L.; Wen, Z. The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester. Agriculture 2022, 12, 890. https://doi.org/10.3390/agriculture12060890
Liu W, Luo X, Zeng S, Zeng L, Wen Z. The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester. Agriculture. 2022; 12(6):890. https://doi.org/10.3390/agriculture12060890
Chicago/Turabian StyleLiu, Weijian, Xiwen Luo, Shan Zeng, Li Zeng, and Zhiqiang Wen. 2022. "The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester" Agriculture 12, no. 6: 890. https://doi.org/10.3390/agriculture12060890
APA StyleLiu, W., Luo, X., Zeng, S., Zeng, L., & Wen, Z. (2022). The Design and Test of the Chassis of a Triangular Crawler-Type Ratooning Rice Harvester. Agriculture, 12(6), 890. https://doi.org/10.3390/agriculture12060890