
Developing an IoT-Enabled Cloud Management Platform for Agricultural Machinery Equipped with Automatic Navigation Systems

Abstract
:1. Introduction
2. Related Works
2.1. IoT-Based System
2.2. Operations Assignment and Scheduling of Multiple Machines
3. Methodology
3.1. Experimental Site
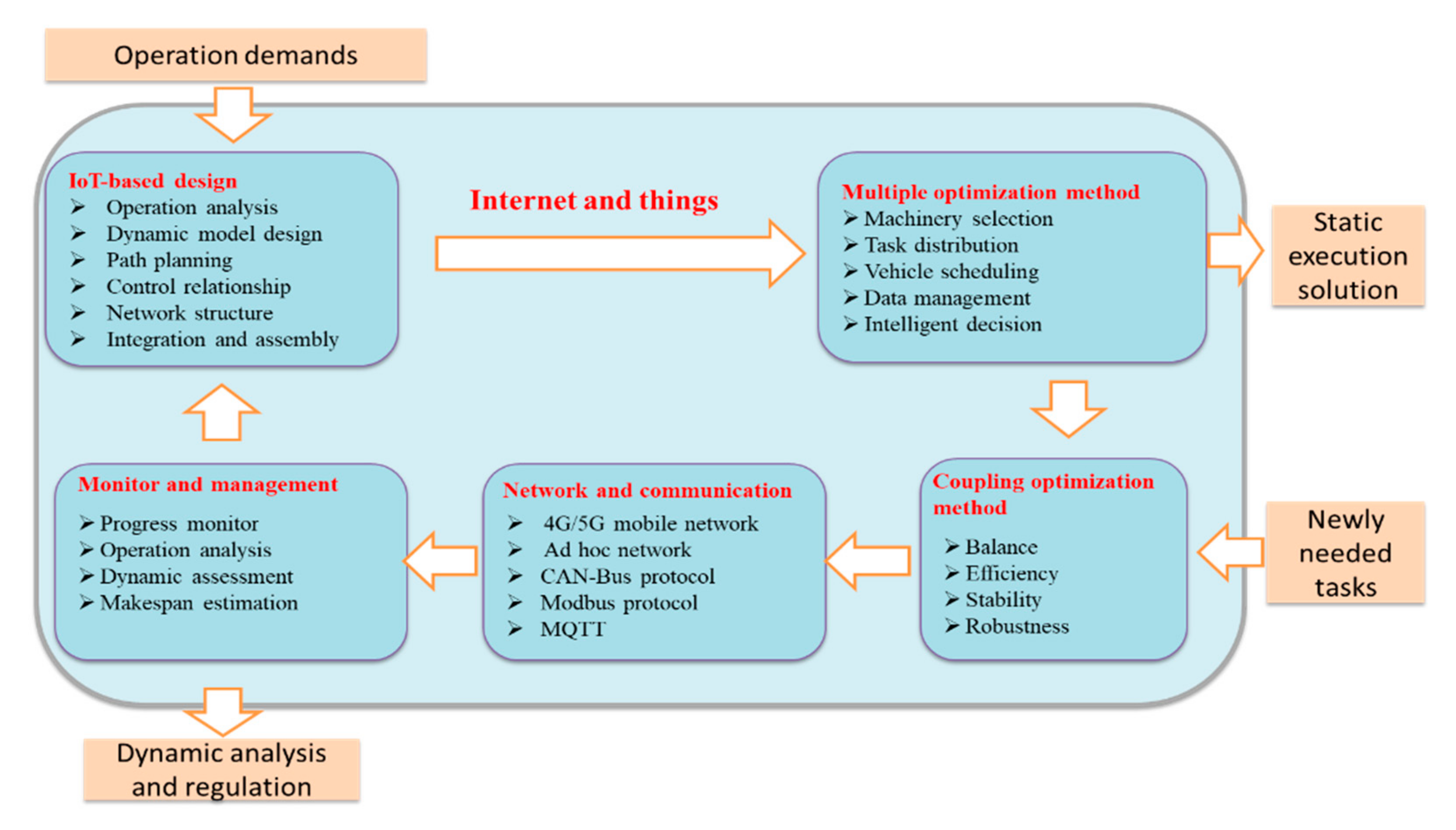
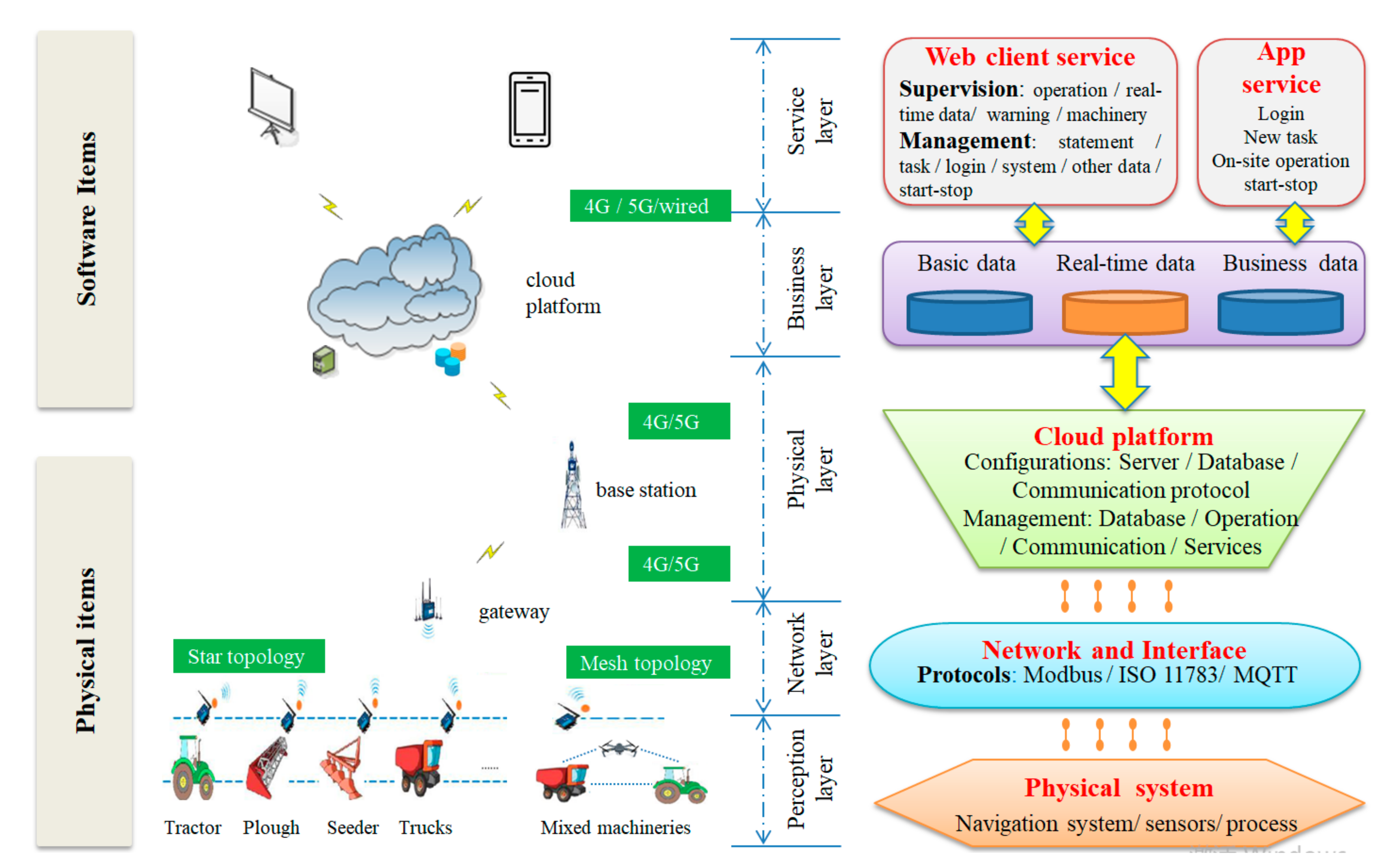
3.2. Design Method and System Architecture
4. Key Enabling Technologies
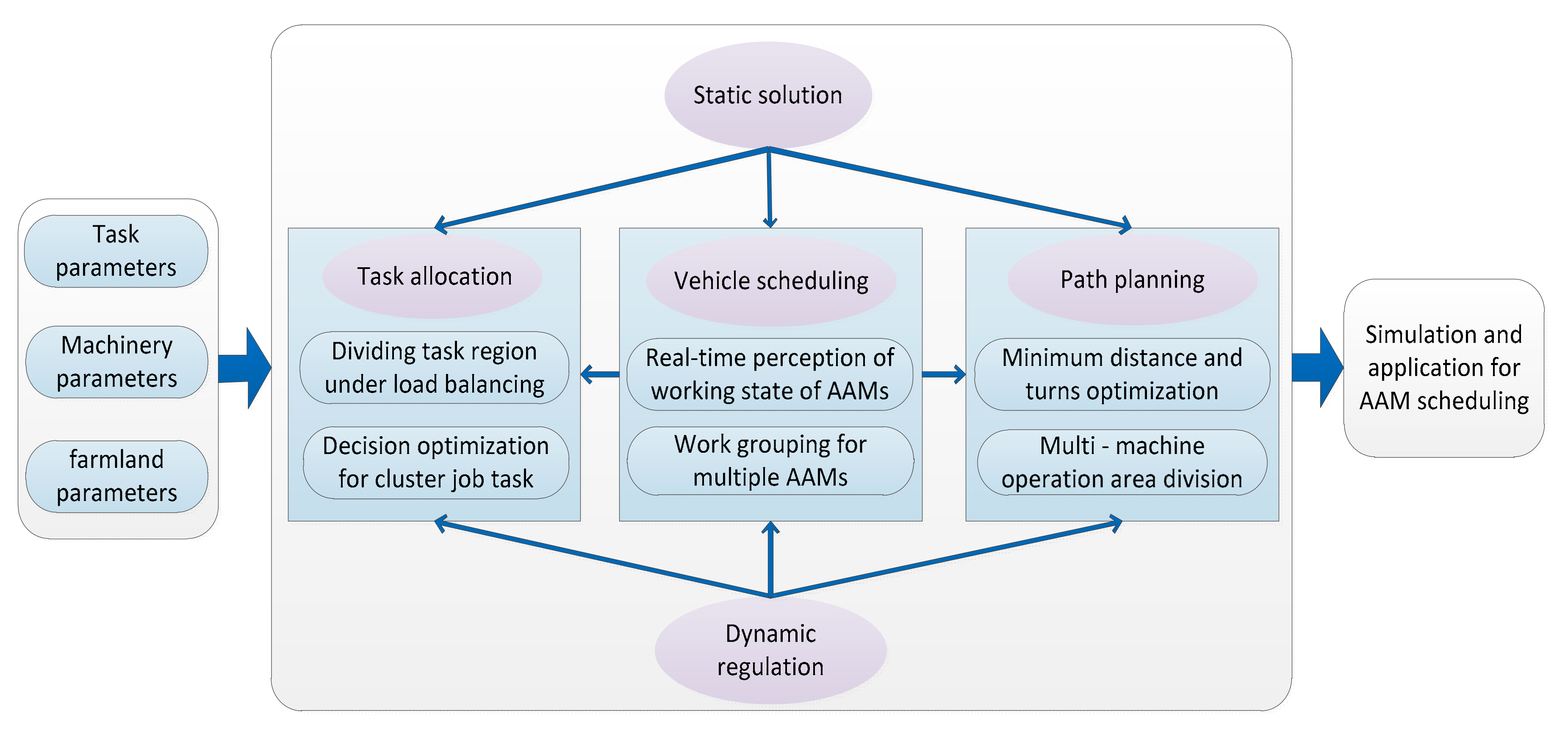
4.1. Multi-Optimization and Cloud Computing
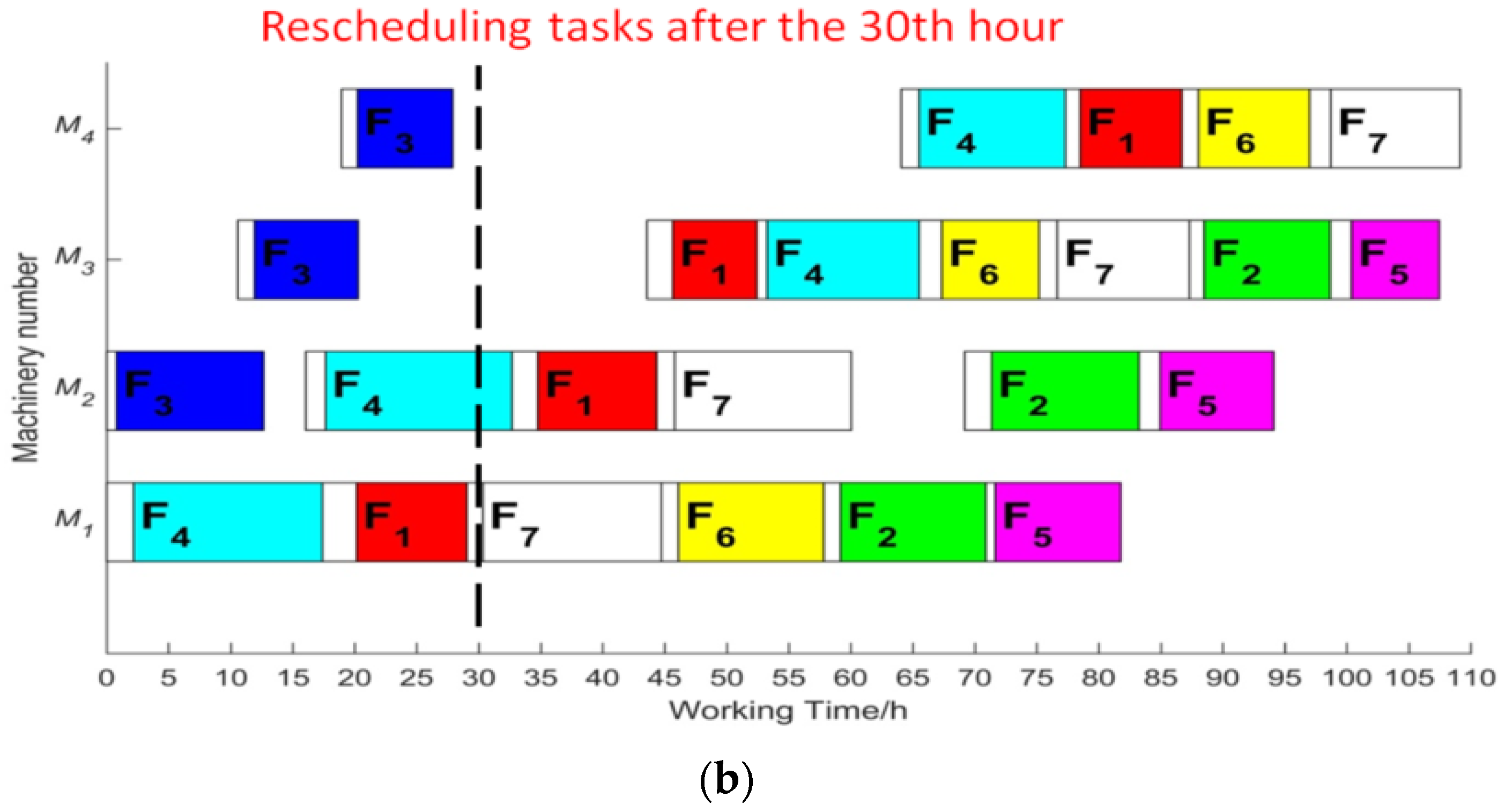
4.1.1. Modeling of AAM Scheduling Problem
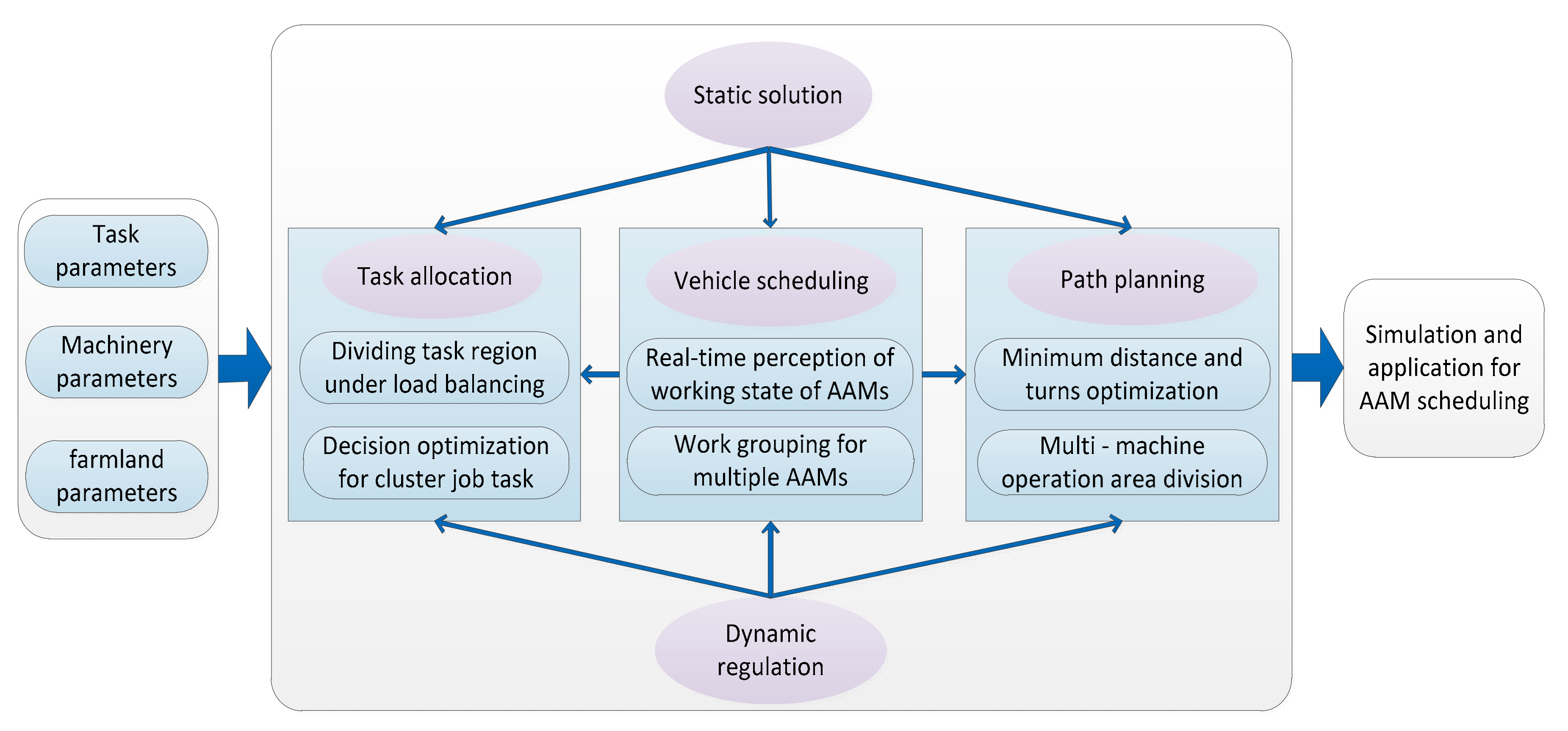
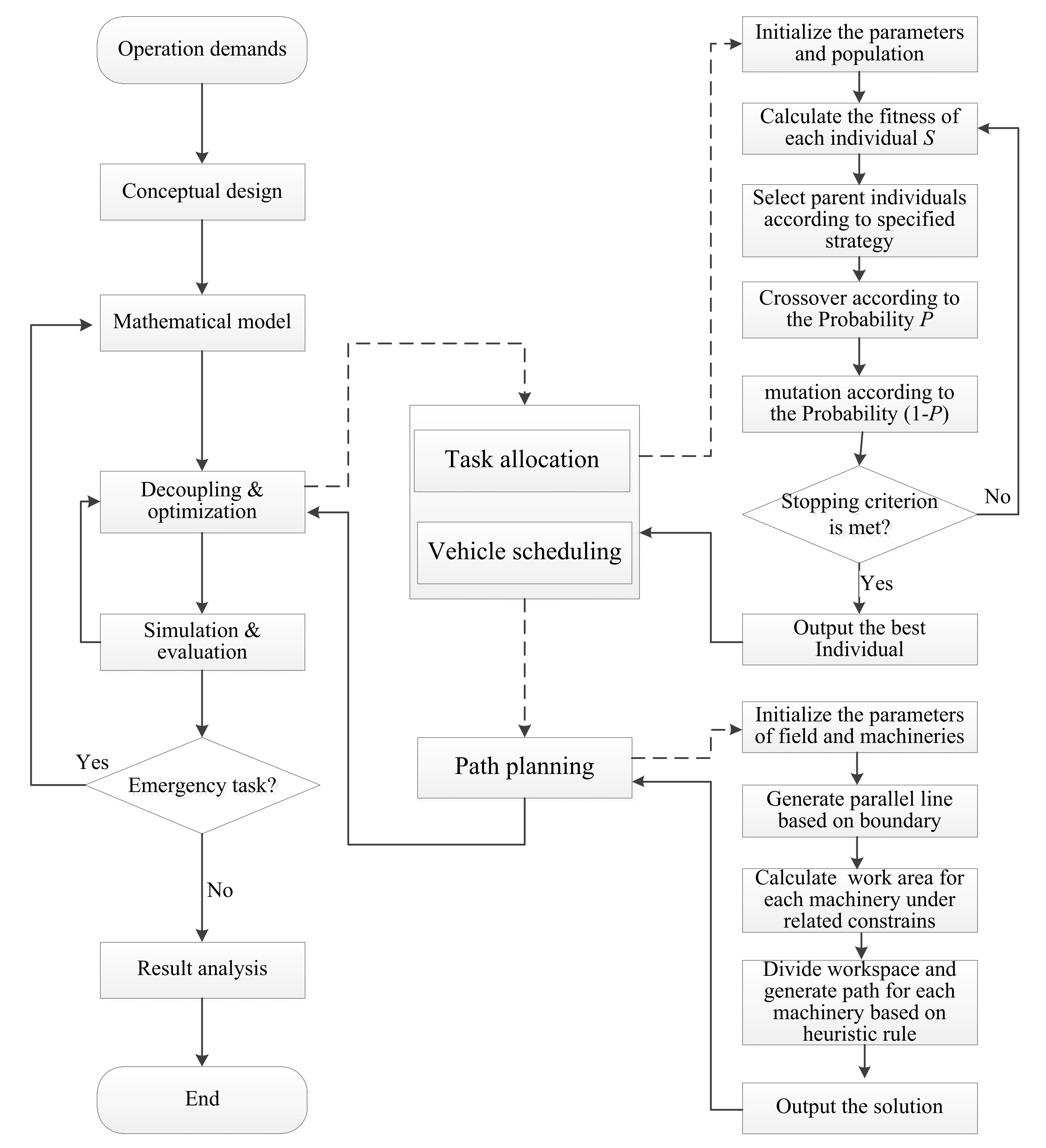
4.1.2. Decoupling Algorithm for Solving the Multi-Objective Optimization Problem
4.2. System Development
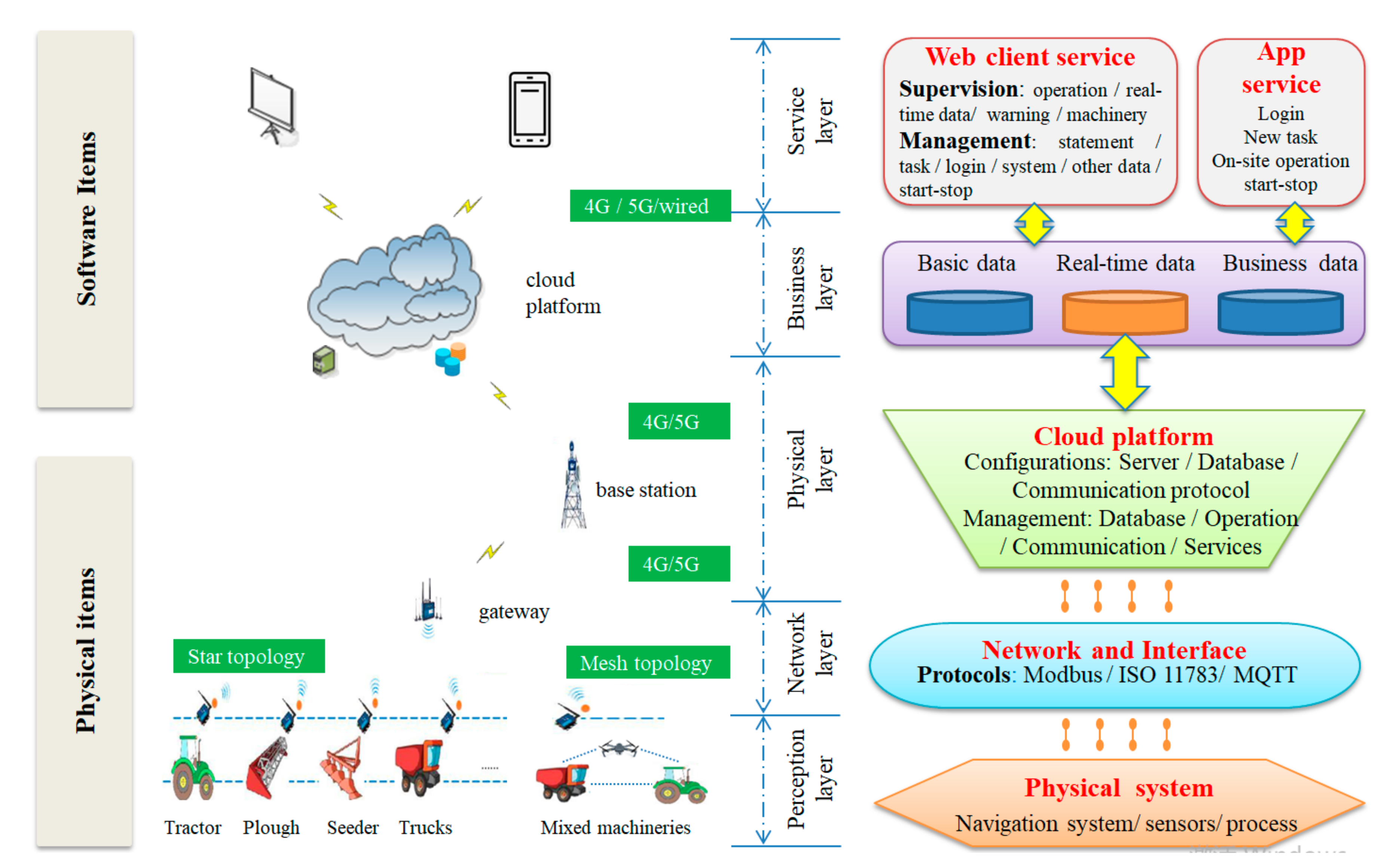
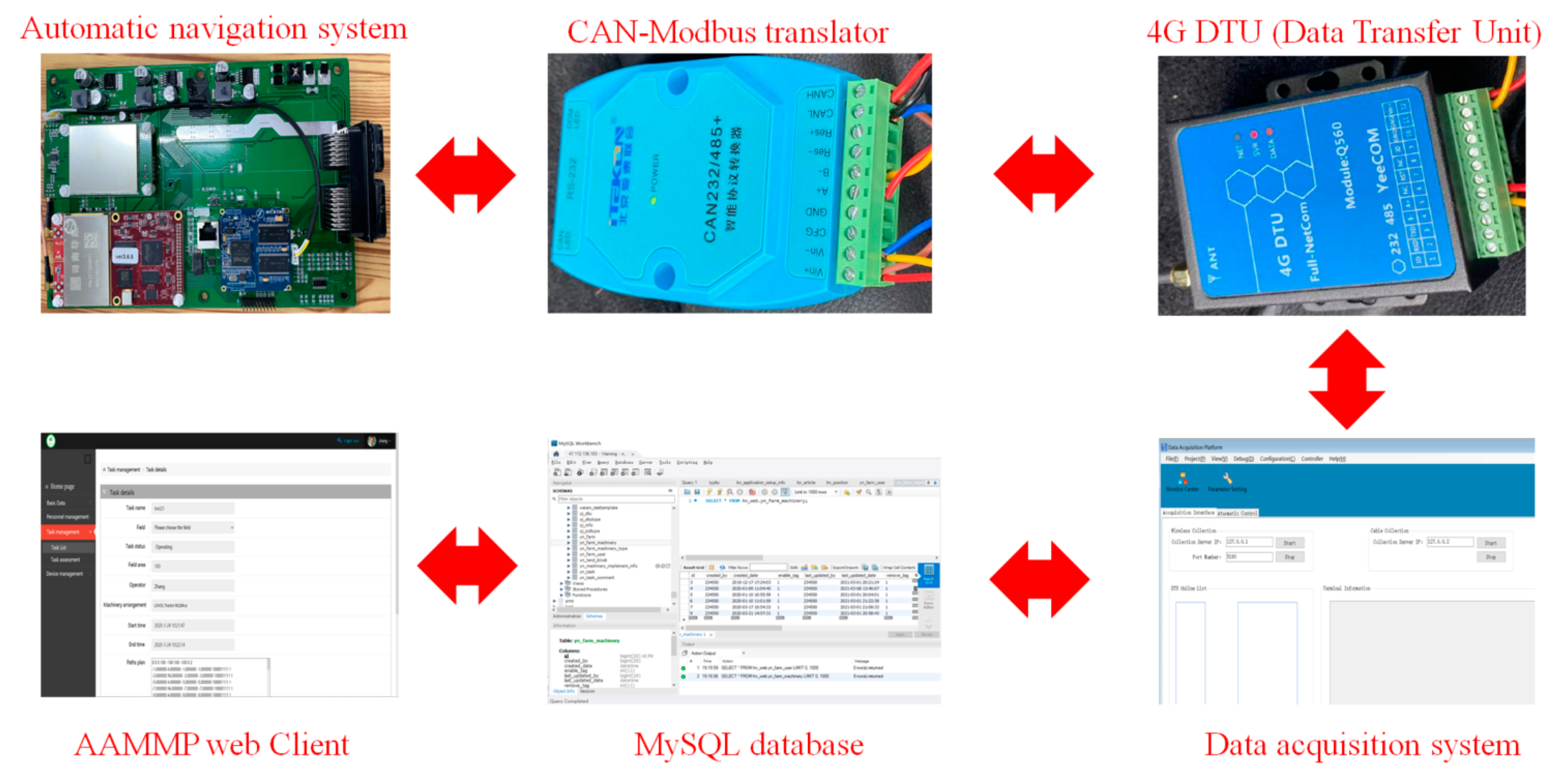
4.2.1. Physical Architecture
4.2.2. Software System
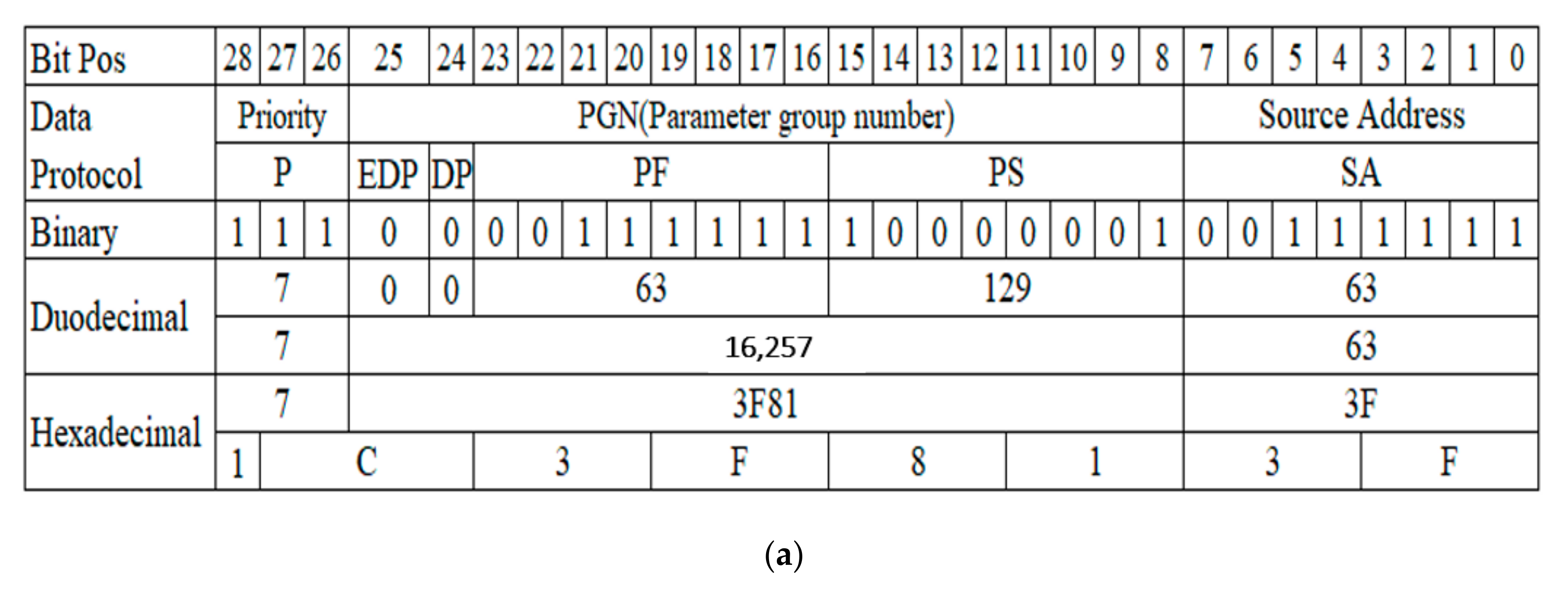
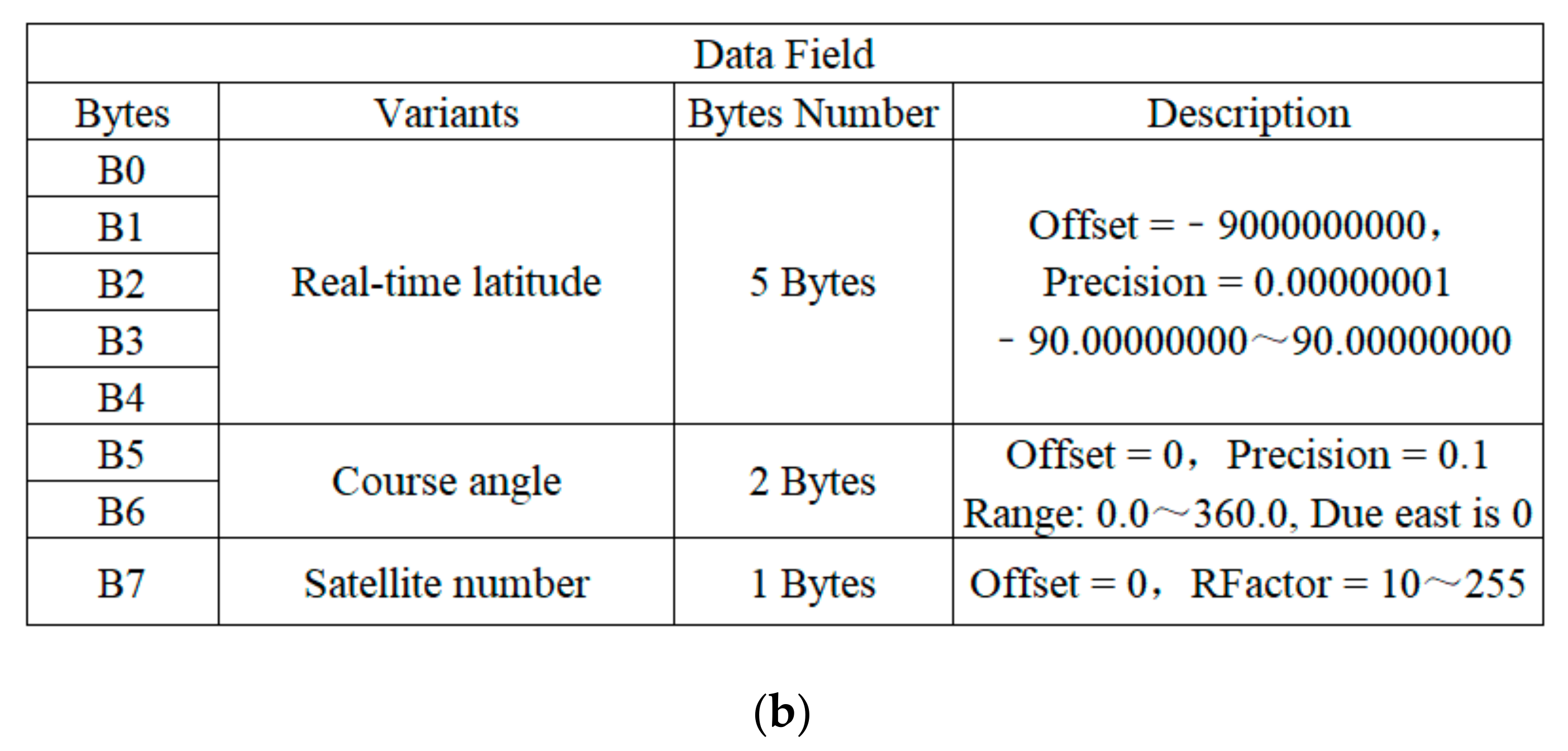
4.3. Network and Communication
5. Implementation of an AAMMP System
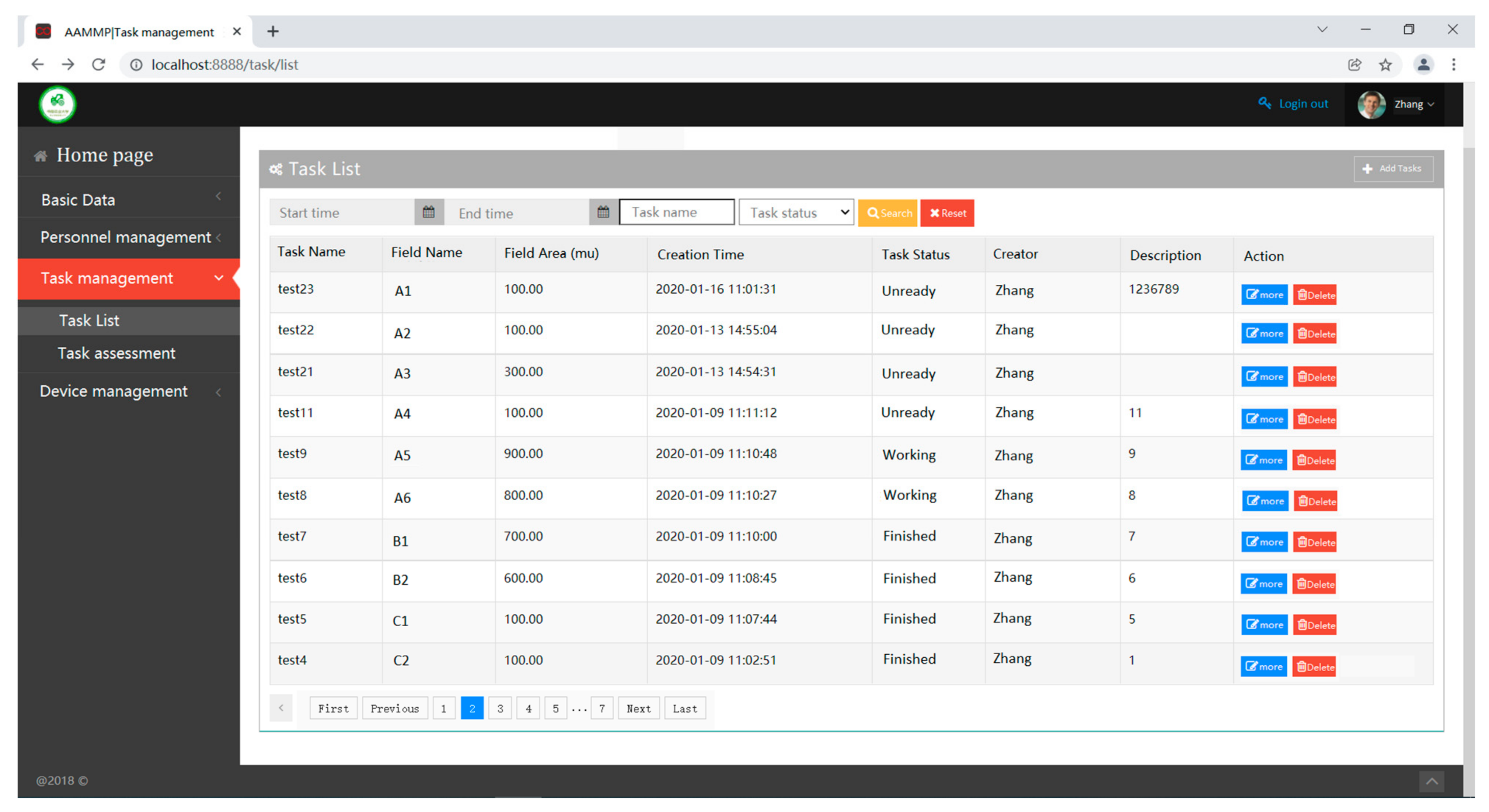
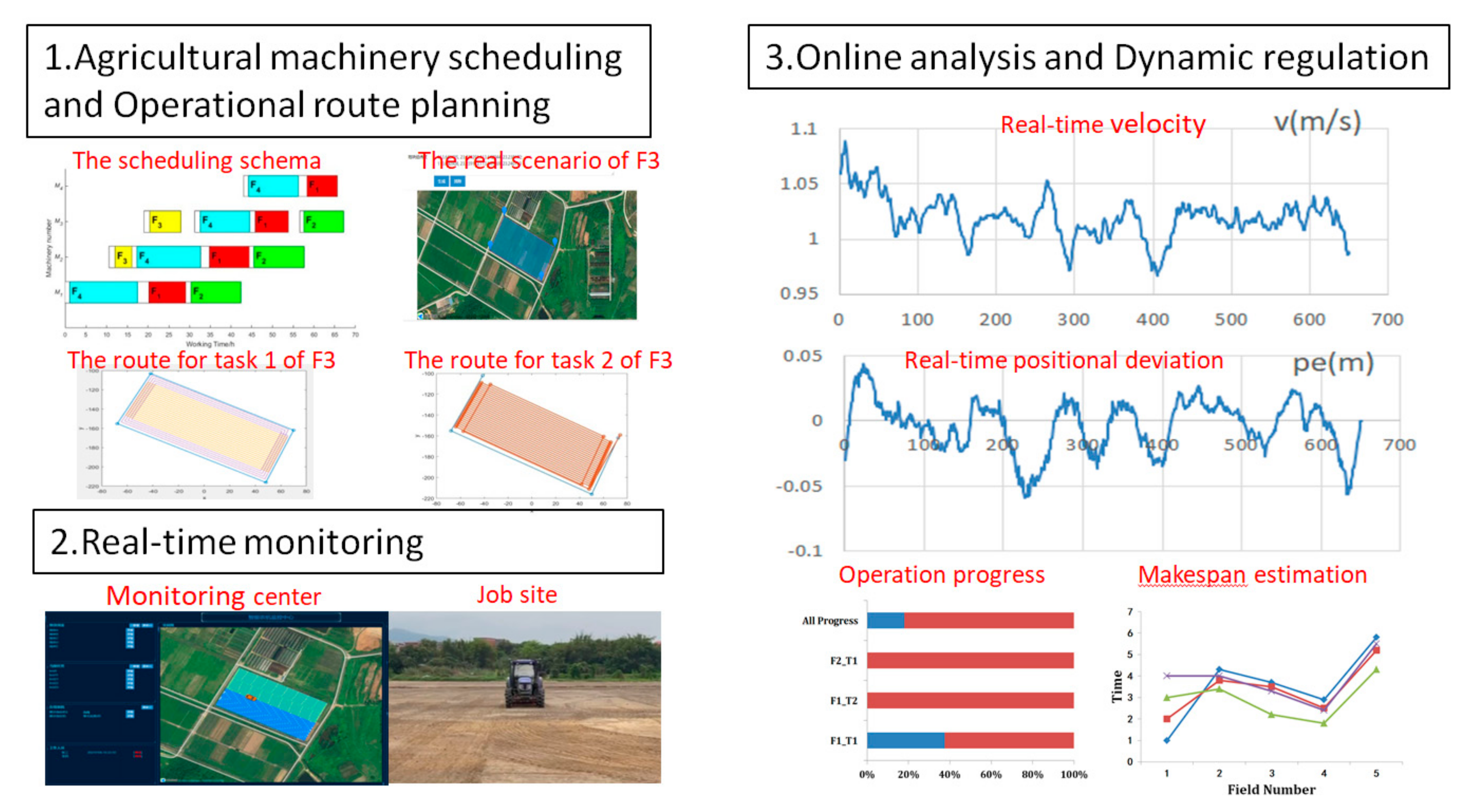
5.1. An Illustrative Operational Procedure
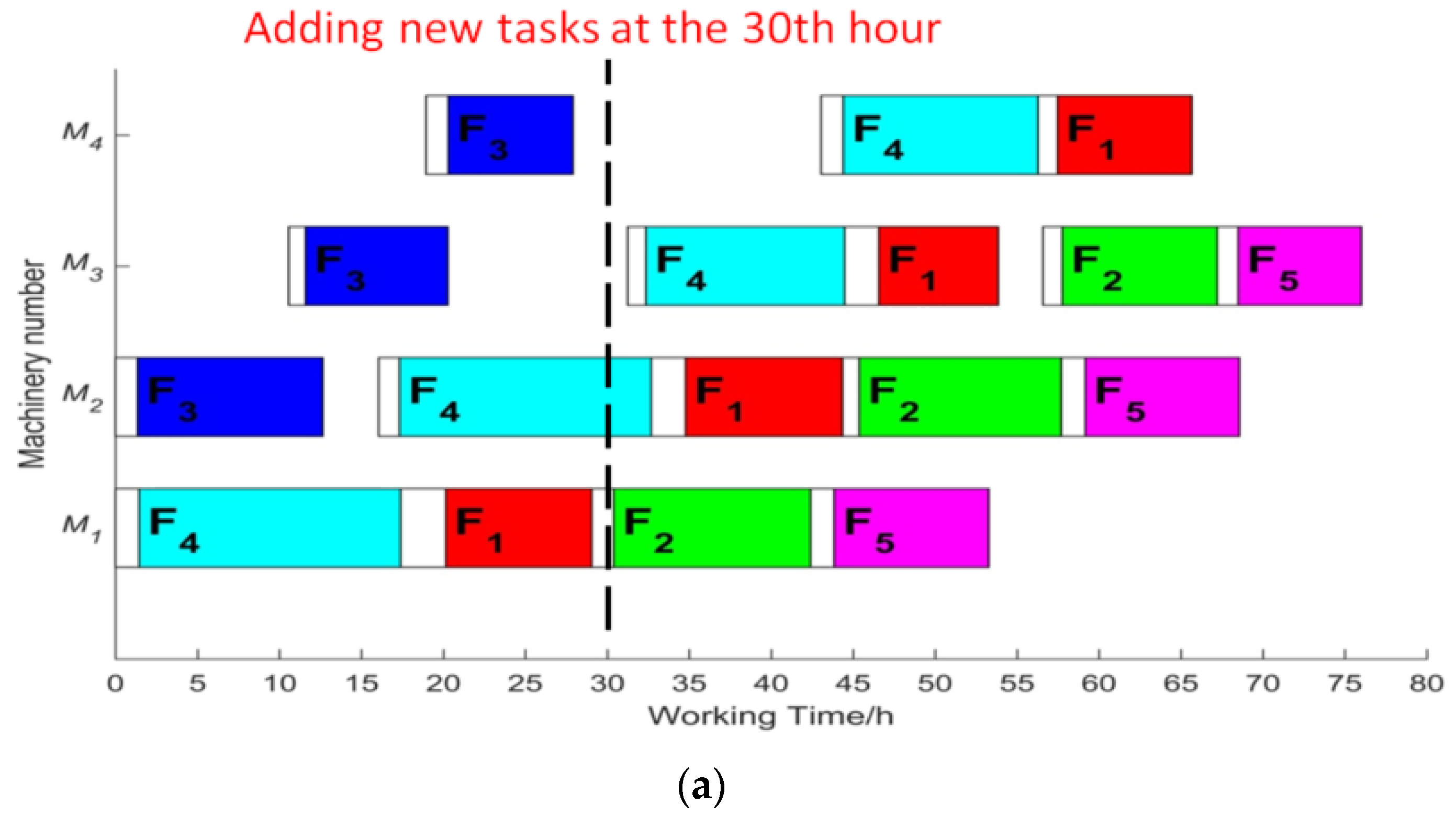
5.2. System Performance Analysis
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rains, G.C.; Thomas, D.L. Precision Farming: An Introduction; University of Georgia: Griffin, GA, USA, 2009. [Google Scholar]
- Shafi, U.; Mumtaz, R.; Garcia-Nieto, J.; Hassan, S.A.; Zaidi, S.A.R.; Iqbal, N. Precision Agriculture Techniques and Practices: From Considerations to Applications. Sensors 2019, 19, 3796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sundmaeker, H.; Verdouw, C.; Wolfert, S.; Pérez Freire, L. Internet of Food and Farm 2020. In Digitising the Industry—Internet of Things Connecting Physical, Digital and Virtual Worlds; Vermesan, O., Friess, P., Eds.; River Publishers: Gistrup, Denmark; Delft, The Netherlands, 2016; pp. 129–151. [Google Scholar]
- Pang, Z.; Chen, Q.; Han, W.; Zheng, L. Value-centric design of the internet-of-things solution for food supply chain: Value creation, sensor portfolio and information fusion. Inf. Syst. Front. 2015, 17, 289–319. [Google Scholar] [CrossRef]
- Sorensen, C.G.; Fountas, S.; Nash, E.; Pesonen, L.; Bochtis, D.; Pedersen, S.M.; Basso, B.; Blackmore, S.B. Conceptual model of a future farm management information system. Comput. Electron. Agric. 2010, 72, 37–47. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Zhang, H.; Leng, J.; Chen, X. Digital twin-driven rapid individualised designing of automated flow-shop manufacturing system. Int. J. Prod. Res. 2019, 57, 3903–3919. [Google Scholar] [CrossRef]
- Jayaraman, P.P.; Yavari, A.; Georgakopoulos, D.; Morshed, A.; Zaslavsky, A. Internet of Things Platform for Smart Farming: Experiences and Lessons Learnt. Sensors 2016, 16, 1884. [Google Scholar] [CrossRef]
- Kosior, K. Digital transformation in the agri-food sector–opportunities and challenges. Annls Pol. Assoc. Agric. Agribus. Econ. 2018, 2, 98–104. [Google Scholar] [CrossRef]
- Li, S.; Xu, H.; Ji, Y.; Cao, R.; Zhang, M.; Li, H. Development of a following agricultural machinery automatic navigation system. Comput. Electron. Agric. 2019, 158, 335–344. [Google Scholar] [CrossRef]
- Zhao, C.J.; Yang, X.T.; Li, B.; Li, M.; Yan, H. The retrospect and prospect of agricultural information technology in China. J. Agric. 2018, 8, 180–186. [Google Scholar]
- Ji, C.Y.; Zhou, J. Current situation of navigation technologies for agricultural machinery. Trans. Chin. Soc. Agric. Mach. 2014, 45, 44–54. [Google Scholar]
- Wolfert, S.; Sorensen, C.A.G.; Goense, D. A Future Internet Collaboration Platform for Safe and Healthy Food from Farm to Fork. In Proceedings of the 2014 Annual SRII Global Conference, San Jose, CA, USA, 23–25 April 2014. [Google Scholar]
- Godwin, R.J.; Richards, T.E.; Wood, G.A.; Welsh, J.P.; Knight, S.M. An economic analysis of the potential for precision farming in UK cereal production. Biosyst. Eng. 2003, 84, 533–545. [Google Scholar] [CrossRef] [Green Version]
- Nikkila, R.; Seilonen, I.; Koskinen, K. Software architecture for farm management information systems in precision agriculture. Comput. Electron. Agric. 2010, 70, 328–336. [Google Scholar] [CrossRef]
- Murakami, E.; Saraiva, A.M.; Ribeiro, L.C.M., Jr.; Cugnasca, C.E.; Hirakawa, A.R.; Correa, P.L.P. An infrastructure for the development of distributed service-oriented information systems for precision agriculture. Comput. Electron. Agric. 2007, 58, 37–48. [Google Scholar] [CrossRef]
- Franco, J.D.; Ramirez-Delreal, T.A.; Villanueva, D.; Gárate-García, A.; Armenta-Medina, D. Monitoring of Ocimum basilicum seeds growth with image processing and fuzzy logic techniques based on Cloudino-IoT and FIWARE platforms. Comput. Electron. Agric. 2020, 173, 105389. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Kalantari, F.; Ting, K.C.; Thorp, K.; Hameed, I.A.; Weltzien, C.; Ahmad, D.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. 2018, 11, 1–22. [Google Scholar] [CrossRef]
- Harun, A.N.; Mohamed, N.; Ahmad, R.; Rahim, A.R.A.; Ani, N.N. Improved Internet of Things (IoT) monitoring system for growth optimization of Brassica chinensis. Comput. Electron. Agric. 2019, 164, 104836. [Google Scholar] [CrossRef]
- Sanjeevi, P.; Prasanna, S.; Kumar, B.S.; Gunasekaran, G.; Alagiri, I.; Anand, R.V. Precision agriculture and farming using Internet of Things based on wireless sensor network. Trans. Emerg. Telecommun. Technol. 2020, 31, e3978. [Google Scholar] [CrossRef]
- Ruan, J.; Shi, Y. Monitoring and assessing fruit freshness in IOT-based e-commerce delivery using scenario analysis and interval number approaches. Inf. Sci. 2016, 373, 557–570. [Google Scholar] [CrossRef]
- Chaudhary, R.; Pandey, J.R.; Pandey, P.; Chaudhary, P. Case Study of Internet of Things in Area of Agriculture, ‘AGCO’s Fuse Technology’s’ ‘Connected Farm Services’. In Proceedings of the 2015 International Conference on Green Computing and Internet of Things(ICGCIoT), Noida, India, 8–10 October 2015; pp. 148–153. [Google Scholar]
- Oksanen, T.; Linkolehto, R.; Seilonen, I. Adapting an industrial automation protocol to remote monitoring of mobile agricultural machinery: A combine harvester with IoT. IFAC-PapersOnLine 2016, 49, 127–131. [Google Scholar] [CrossRef]
- Zhang, R.; Hao, F.; Sun, X. The design of agricultural machinery service management system based on Internet of Things. Procedia Comput. Sci. 2017, 107, 53–57. [Google Scholar] [CrossRef]
- Li, C.; Tang, Y.; Wang, M.; Zhao, X. Agricultural Machinery Information Collection and Operation Based on Data Platform. In Proceedings of the 2018 IEEE International Conference of Safety Produce Informatization (IICSPI), Chongqing, China, 10–12 December 2018; pp. 472–475. [Google Scholar]
- Fu, W.; Dong, X.R.; Shuai, W.; Yang, M.; Wang, J. The Intelligent Supervision System of Farm Based on “Internet + BDS + GIS”. In International Conference in Communications, Signal Processing, and Systems; Springer: Singapore, 2015; pp. 813–820. [Google Scholar]
- Kim, W.-S.; Lee, W.-S.; Kim, Y.-J. A Review of the Applications of the Internet of Things (IoT) for Agricultural Automation. J. Biosyst. Eng. 2020, 45, 385–400. [Google Scholar] [CrossRef]
- Pitakaso, R.; Sethanan, K. Adaptive large neighborhood search for scheduling sugarcane inbound logistics equipment and machinery under a sharing infield resource system. Comput. Electron. Agric. 2019, 158, 313–325. [Google Scholar] [CrossRef]
- Cao, R.; Li, S.; Ji, Y.; Zhang, Z.; Xu, H.; Zhang, M.; Li, M.; Li, H. Task assignment of multiple agricultural machinery cooperation based on improved ant colony algorithm. Comput. Electron. Agric. 2021, 182, 10599. [Google Scholar] [CrossRef]
- He, P.; Li, J.; Wang, X. Wheat harvest schedule model for agricultural machinery cooperatives considering fragmental farmlands. Comput. Electron. Agric. 2018, 145, 226–234. [Google Scholar] [CrossRef]
- Zhang, F.; Luo, X.; Zhang, Z.; He, J.; Zhang, W. Research on Agricultural Machinery Scheduling Problem based on Improved Multi-parents Genetic Algorithm. Trans. Chin. Soc. Agric. Eng. 2021, 37, 192–198. [Google Scholar]
- Zhang, F.; Gao, Y.; Li, Y. Research on Cross-Regional Emergency Scheduling and Allocating Strategies. Int. J. Grid Distrib. Comput. 2016, 9, 89–98. [Google Scholar] [CrossRef]
- Seyyedhasani, H.; Dvorak, J.S.; Roemmele, E. Routing algorithm selection for field coverage planning based on field shape and fleet size. Comput. Electron. Agric. 2019, 156, 523–529. [Google Scholar] [CrossRef]
- Jensen, M.F.; Bochtis, D.; Sørensen, C.G. Coverage planning for capacitated field operations, part II: Optimisation. Biosyst. Eng. 2015, 139, 149–164. [Google Scholar] [CrossRef]
- Oksanen, T.; Piirainen, P.; Seilonen, I. Remote access of ISO 11783 process data by using OPC Unified Architecture technology. Comput. Electron. Agric. 2015, 117, 141–148. [Google Scholar] [CrossRef]
- Vuran, M.C.; Salam, A.; Wong, R.; Irmak, S. Internet of underground things in precision agriculture: Architecture and technology aspects. Ad. Hoc. Netw. 2018, 81, 160–173. [Google Scholar] [CrossRef] [Green Version]
- Tuna, G.; Kogias, D.G.; Gungor, V.C.; Gezer, C.; Tas‚kın, E.; Ayday, E. A survey on information security threats and solutions for Machine to Machine (M2M) communications. J. Parallel Distrib. Comput. 2017, 109, 142–154. [Google Scholar] [CrossRef] [Green Version]
- Udoh, I.S.; Kotonya, G. Developing IoT applications: Challenges and frameworks. IET Cyber-Phys. Syst. Theory Appl. 2018, 3, 65–72. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Sensors | Networks | Integration (Y/N) | Functions |
|---|---|---|---|---|
| Chaudhary et al. [21] | GPS | GPRS, Bluetooth | N | Monitoring and management |
| Oksanen et al. [22] | GPS | 3G, CAN | Y | Remote monitoring |
| Zhang et al. [23] | GPS | GPRS, Wi-Fi, 4G | N | Monitoring and management |
| Li et al. [24] | GPS | CAN, RS232 | Y | Data acquisition and processing |
| Wei Fu [25] | BDS | GPRS | Y | Monitoring and management |
| Wan-Soo Kim [26] | - | - | - | Operation service |
| Notations | Remarks |
|---|---|
| i | Indices for field, i = 1, …, I |
| j | Indices for machine, j = 1, …, J |
| k | Indices for task and its corresponding machine group, k = 1, …, K |
| T | Total operation time of completing all tasks |
| Ti | Total operation time of competing all tasks in field i |
| Tik | Operation time of competing task k in field i |
| TransTik | Traveling time between field i and machine group k |
| readyTik | Ready time of task k for machine group k in field i |
| workTik | Work time of task k for machine group k in field i |
| TransTijk | Traveling time between field i and machine j that can do task k |
| Dij | Distance between field i and machine j |
| Ek | Operating efficiency of completing task k |
| Uij | |
| TjkE | Earliest arrival time of machine j for task k |
| TjkL | Latest arrival time of machine j for task k |
| Yi | Task quantity of field i |
| zijk | |
| Si | Area of field i |
| Type | Function | Protocol | Devices Name | Devices Details | Photo |
|---|---|---|---|---|---|
| Data Transfer Unit | Data Transferring | MQTT | 4G DTU | YeeCOM Q560 4G DTU |  |
| Protocol Conversing | ISO 11783/Modbus | Bidirectional Transducer | ITEKON CAN232/485 |  | |
| Embedded System | Navigating | ISO 11783/Modbus | Automatic Navigation System | Self-Developed |  |
| Motion Controlling | ISO 11783/Modbus | Motion controller | SonnePower SPC-STW-2612CMS |  | |
| Operation Machinery | Tillage/Seeding | Mixed | Tractor | LOVOL M1204-p |  |
| Spraying | Mixed | Sprayer | LOVOL ARBOS |  | |
| Harvesting | Mixed | Harvester | LOVOL RG50 |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Zhang, W.; Luo, X.; Zhang, Z.; Lu, Y.; Wang, B. Developing an IoT-Enabled Cloud Management Platform for Agricultural Machinery Equipped with Automatic Navigation Systems. Agriculture 2022, 12, 310. https://doi.org/10.3390/agriculture12020310
Zhang F, Zhang W, Luo X, Zhang Z, Lu Y, Wang B. Developing an IoT-Enabled Cloud Management Platform for Agricultural Machinery Equipped with Automatic Navigation Systems. Agriculture. 2022; 12(2):310. https://doi.org/10.3390/agriculture12020310
Chicago/Turabian StyleZhang, Fan, Wenyu Zhang, Xiwen Luo, Zhigang Zhang, Yueteng Lu, and Ben Wang. 2022. "Developing an IoT-Enabled Cloud Management Platform for Agricultural Machinery Equipped with Automatic Navigation Systems" Agriculture 12, no. 2: 310. https://doi.org/10.3390/agriculture12020310
APA StyleZhang, F., Zhang, W., Luo, X., Zhang, Z., Lu, Y., & Wang, B. (2022). Developing an IoT-Enabled Cloud Management Platform for Agricultural Machinery Equipped with Automatic Navigation Systems. Agriculture, 12(2), 310. https://doi.org/10.3390/agriculture12020310