From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production

 ,
, 


Abstract

1. Introduction
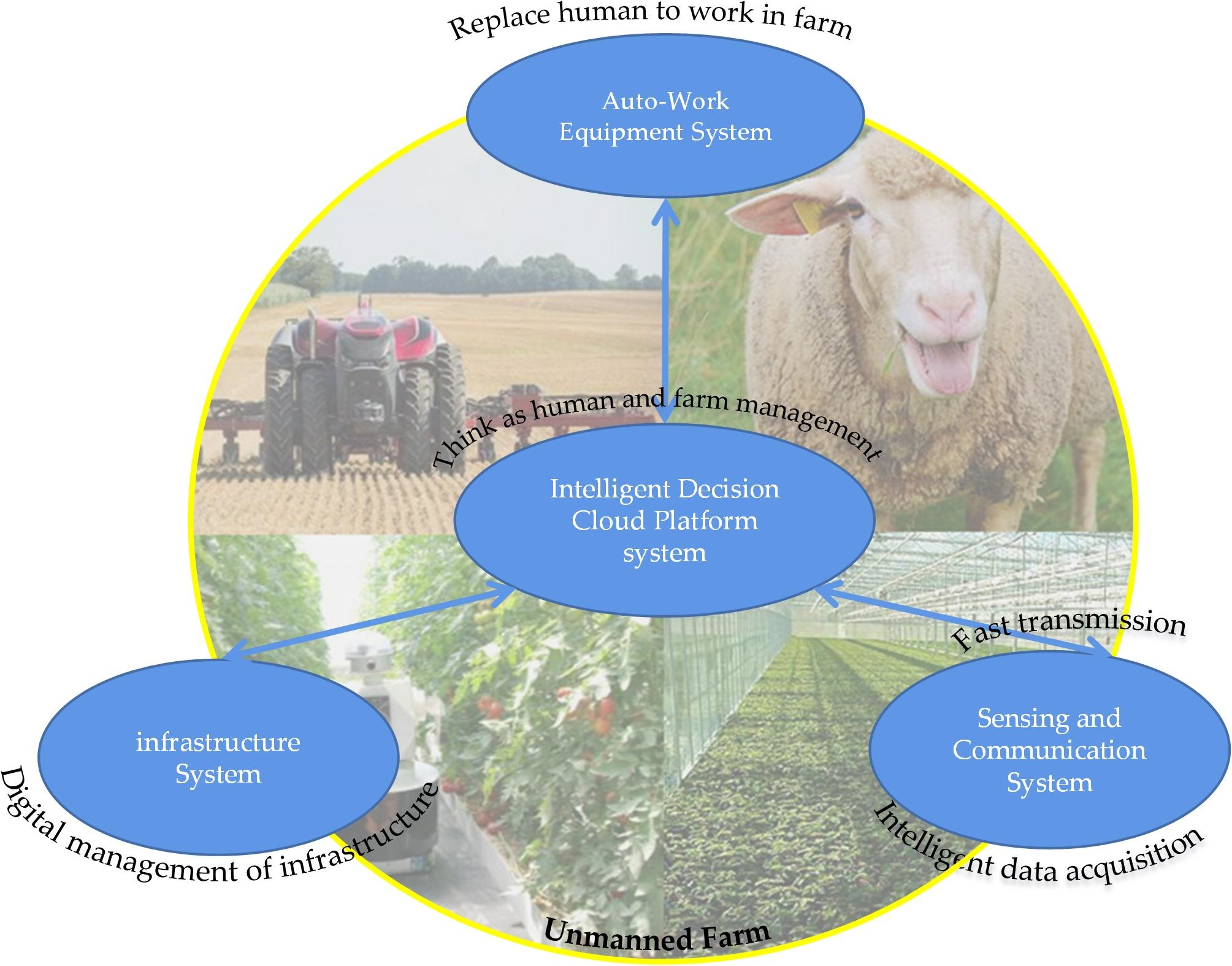
- We proposed a new agriculture production mode, namely unmanned farm, and describe different interactions between the components.
- We introduced the application of related technologies in recent years, and discussed how to apply these technologies in unmanned farm and the existing challenges.
- We analyzed the problems that will exist in the unmanned farm, including the current technical problems, as well as the social impact, data privacy, transparency etc.
- We put forward our own suggestions and views on the development of unmanned farms.
2. Unmanned Farms
2.1. Definition
2.2. System Composition
2.3. The Development Stage of the Unmanned Farm
3. Unmanned Farm System
3.1. Infrastructure System
3.2. Sensing and Communication System
3.2.1. Sensing: Intelligent Perception of Unmanned Farm
3.2.2. Transmission: High-Speed and Efficient Communication Promotes the Unmanned Farm
3.3. Intelligent Decision Cloud Platform
3.3.1. Big Data: Data-Driven Unmanned Farm
3.3.2. Artificial Intelligence (AI): Make Unmanned Farms Think Like People
Agricultural Decision Support Systems
Agricultural Prediction Analysis
Agricultural Computer Vision
Agricultural Robot Control
3.3.3. Cloud Computing: Stable and High-Speed Data Storage and Computing
3.4. Auto-Work Equipment System
3.4.1. Intelligent Fixed Equipment
3.4.2. Agricultural Robots: Replace Farmers
4. Prospect
5. Challenges
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- FAO. The State of Food Security and Nutrition in the World 2020; FAO: Rome, Italy, 2020. [Google Scholar]
- Hunter, M.C.; Smith, R.G.; Schipanski, M.E.; Atwood, L.W.; Mortensen, D.A. Agriculture in 2050: Recalibrating Targets for Sustainable Intensification. BioScience 2017, 67, 385–390. [Google Scholar] [CrossRef]
- European Commission. Generational Renewal in EU Agriculture: Statistical Background; DG Agriculture & Rural Development, Economic Analysis of EU Agriculture Unit: Brussels, Belgium, 2012; pp. 1–10. [Google Scholar]
- Unay-Gailhard, I.; Bavorova, M.; Bednarikova, Z.; Ponkina, E.V. “I don’t want to work in agriculture!” The transition from agricultural education to the labor market in Rural Russia. Rural Sociol. 2019, 84, 315–349. [Google Scholar] [CrossRef]
- Share of the Labor Force Employed in Agriculture. Available online: https://ourworldindata.org/employment-in-agriculture#all-charts-preview (accessed on 4 February 2021).
- Stevant, P.; Rebours, C.; Chapman, A. Seaweed aquaculture in Norway: Recent industrial developments and future perspectives. Aquac. Int. 2017, 25, 1373–1390. [Google Scholar] [CrossRef]
- Phan, L.T.; Nguyen, T.V.; Luong, Q.C. Importation and human-to-human transmission of a Novel Coronavirus in Vietnam. N. Engl. J. Med. 2020, 382, 872–874. [Google Scholar] [CrossRef]
- Wang, C.; Horby, P.W.; Hayden, F.G.; Gao, G.F. A novel coronavirus outbreak of global health concern. Lancet 2020, 395, 470–473. [Google Scholar] [CrossRef]
- Akbar, M.O.; Shahbaz Khan, M.S.; Ali, M.J.; Hussain, A.; Qaiser, G.; Pasha, M.; Pasha, U.; Missen, M.S.; Akhtar, N. IoT for development of smart dairy farming. J. Food Qual. 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- Ramli, M.R.; Daely, P.T.; Kim, D.; Lee, J.M. IoT-based adaptive network mechanism for reliable smart farm system. Comput. Electron. Agric. 2020, 170, 105287. [Google Scholar] [CrossRef]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Kamilaris, A.; Kartakoullis, A.; Prenafeta-Boldu, F.X. A review on the practice of big data analysis in agriculture. Comput. Electron. Agric. 2017, 143, 23–37. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Liakos, K.G.; Busato, P.; Moshou, D.; Pearson, S.; Bochtis, D. Machine learning in agriculture: A review. Sensors 2018, 18, 2674. [Google Scholar] [CrossRef]
- Walter, A.; Finger, R.; Huber, R.; Buchmann, N. Opinion: Smart farming is key to developing sustainable agriculture. Proc. Natl. Acad. Sci. USA 2017, 114, 6148–6150. [Google Scholar] [CrossRef]
- Daoliang, L.I.; Zhen, L.I. System Analysis and Development Prospect of Unmanned Farming. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–12. [Google Scholar] [CrossRef]
- Hands Free Hectare Project Set to Become World’s First Fully Automated Crop Cycle. Available online: https://www.fdfworld.com/food/hands-free-hectare-project-set-become-worlds-first-fully-automated-crop-cycle (accessed on 20 November 2020).
- Unprecedented Productivity through Advanced Robotics. Available online: https://technofarm.com/en/innovation/ (accessed on 4 February 2021).
- Unmanned Agricultural Machinery Completes Rice “Farming Management”. Available online: http://digitalpaper.stdaily.com/http_www.kjrb.com/kjrb/html/2020-09/07/content_453125.htm?div=-1 (accessed on 10 October 2020).
- Jingdong Liu Qiangdong Announced: Pig Raising! Available online: https://www.sohu.com/a/366309070_488608 (accessed on 4 February 2021).
- Goger, G.; Bisenberger, T. Digitalisierung im Infrastrukturbau—Baubetriebliche Entwicklungen. Geomech. Tunn. 2020, 13, 165–177. [Google Scholar] [CrossRef]
- Gamayunova, O.; Vatin, N. BIM-technology in architectural design. Adv. Mater. Res. 2015, 1065–1069, 2611–2614. [Google Scholar] [CrossRef]
- Dagar, R.; Som, S.; Khatri, S.K. Smart Farming—IoT in Agriculture. In Proceedings of the 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 11–12 July 2018. [Google Scholar] [CrossRef]
- Jaiganesh, S.; Gunaseelan, K.; Ellappan, V. IOT agriculture to improve food and farming technology. In Proceedings of the 2017 Conference on Emerging Devices and Smart Systems (ICEDSS), Tiruchengode, India, 3–4 March 2017; pp. 260–266. [Google Scholar] [CrossRef]
- Thakur, D.; Kumar, Y.; Kumar, A.; Singh, P.K. Applicability of Wireless Sensor Networks in Precision Agriculture: A Review. Wirel. Pers. Commun. 2019, 107, 471–512. [Google Scholar] [CrossRef]
- Aygun, S.; Gunes, E.O.; Subasi, M.A.; Alkan, S. Sensor Fusion for IoT-based Intelligent Agriculture System. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Istanbul, Turkey, 16–19 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Hansen, M.F.; Smith, M.L.; Smith, L.N.; Salter, M.G.; Baxter, E.M.; Farish, M.; Grieve, B. Towards on-farm pig face recognition using convolutional neural networks. Comput. Ind. 2018, 98, 145–152. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, Y.; Pu, R.; Gonzalez-Moreno, P.; Yuan, L.; Wu, K.; Huang, W. Monitoring plant diseases and pests through remote sensing technology: A review. Comput. Electron. Agric. 2019, 165, 104943. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Q.; Zhang, Y.; Wang, H.; Du, X. Normalized NDVI valley area index (NNVAI)-based framework for quantitative and timely monitoring of winter wheat frost damage on the Huang-Huai-Hai Plain, China. Agric. Ecosyst. Environ. 2020, 292, 106793. [Google Scholar] [CrossRef]
- Weiss, M.; Jacob, F.; Duveiller, G. Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 2020, 236, 111402. [Google Scholar] [CrossRef]
- O’Grady, M.J.; Langton, D.; O’Hare, G.M.P. Edge computing: A tractable model for smart agriculture? Artif. Intell. Agric. 2019, 3, 42–51. [Google Scholar] [CrossRef]
- The Truth about IoT Implementations—Wireless vs. Wired. Available online: https://blog.senseware.co/2017/10/10/iot-implementations-wireless-vs-wired (accessed on 30 December 2020).
- Lounis, K.; Zulkernine, M. Attacks and Defenses in Short-Range Wireless Technologies for IoT. IEEE Access 2020, 8, 88892–88932. [Google Scholar] [CrossRef]
- Poursafar, N.; Alahi, M.E.E.; Mukhopadhyay, S. Long-range wireless technologies for IoT applications: A review. In Proceedings of the 2017 Eleventh International Conference on Sensing Technology (ICST), Sydney, Australia, 4–6 December 2018. [Google Scholar]
- Ojha, T.; Misra, S.; Raghuwanshi, N.S. Wireless sensor networks for agriculture: The state-of-the-art in practice and future challenges. Comput. Electron. Agric. 2015, 118, 66–84. [Google Scholar] [CrossRef]
- Rajalakshmi, P.; Mahalakshmi, S.D. IOT based crop-field monitoring and irrigation automation. In Proceedings of the 2016 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016. [Google Scholar]
- Wang, L.; Wang, B. Greenhouse microclimate environment adaptive control based on a wireless sensor network. Int. J. Agric. Biol. Eng. 2020, 13, 64–69. [Google Scholar] [CrossRef]
- Mahale, R.B.; Sonavane, S.S. Smart Poultry Farm Monitoring Using IOT and Wireless Sensor Networks. Int. J. Adv. Res. Comput. Sci. 2016, 7, 187–190. [Google Scholar]
- Goud, K.S.; Sudharson, A. Internet based Smart Poultry Farm. Indian J. Sci. Technol. 2015, 8. [Google Scholar] [CrossRef]
- Wang, D.; Chen, D.; Song, B.; Guizani, N.; Yu, X.; Du, X. From IoT to 5G I-IoT: The Next Generation IoT-Based Intelligent Algorithms and 5G Technologies. IEEE Commun. Mag. 2018, 56, 114–120. [Google Scholar] [CrossRef]
- Maya, G.P.S.; Chintala, B.R. Big data challenges and opportunities in agriculture. Int. J. Agric. Environ. Inf. Syst. 2020, 11, 48–66. [Google Scholar] [CrossRef]
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillaor, P. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Li, C.; Niu, B. Design of smart agriculture based on big data and Internet of things. Int. J. Distrib. Sens. Netw. 2020, 16, 812444474. [Google Scholar] [CrossRef]
- Wang, F. Applied research on agricultural big data. J. Phys. Conf. Ser. 2020, 1533, 42051. [Google Scholar] [CrossRef]
- Newton, J.E.; Nettle, R.; Pryce, J.E. Farming smarter with big data: Insights from the case of Australia’s national dairy herd milk recording scheme. Agric. Syst. 2020, 181, 102811. [Google Scholar] [CrossRef]
- Li, Y. Research on precision planting management system based on agricultural big data. J. Phys. Conf. Ser. 2020, 1544, 12174–12176. [Google Scholar] [CrossRef]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M. Big data in smart farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, L. The big data processing platform for intelligent agriculture. In AIP Conference Proceedings; Liu, L., Xiao, J., Ke, J., Eds.; American Institute of Physics: College Park, MD, USA, 2017. [Google Scholar]
- Weersink, A.; Fraser, E.; Pannell, D.; Duncan, E.; Rotz, S. Opportunities and challenges for big data in agricultural and environmental analysis. In Annual Review of Resource Economics; Rausser, G.C., Zilberman, D., Eds.; Annual Reviews: Palo Alto, CA, USA, 2018. [Google Scholar]
- Zhang, Q.; Yang, L.T.; Chen, Z.; Li, P. A survey on deep learning for big data. Inf. Fusion 2018, 42, 146–157. [Google Scholar] [CrossRef]
- Sudduth, K.A.; Woodward-Greene, M.J.; Penning, B.W.; Locke, M.A.; Rivers, A.R.; Veum, K.S. AI down on the farm. IT Prof. 2020, 22, 22–26. [Google Scholar] [CrossRef]
- Smith, M.J. Getting value from artificial intelligence in agriculture. Anim. Prod. Sci. 2020, 60, 46. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, S.; Liu, J.; Gao, Q.; Dong, S.; Zhou, C. Deep learning for smart fish farming: Applications, opportunities and challenges. Rev. Aquac. 2021, 13, 66–90. [Google Scholar] [CrossRef]
- Zhai, Z.; Martínez, J.F.; Beltran, V.; Martínez, N.L. Decision support systems for agriculture 4.0: Survey and challenges. Comput. Electron. Agric. 2020, 170, 105256. [Google Scholar] [CrossRef]
- Zhou, C.; Lin, K.; Xu, D.; Chen, L.; Guo, Q.; Sun, C.; Yang, X. Near infrared computer vision and neuro-fuzzy model-based feeding decision system for fish in aquaculture. Comput. Electron. Agric. 2018, 146, 114–124. [Google Scholar] [CrossRef]
- Navarro-Hellín, H.; Martínez-Del-Rincon, J.; Domingo-Miguel, R.; Soto-Valles, F.; Torres-Sánchez, R. A decision support system for managing irrigation in agriculture. Comput. Electron. Agric. 2016, 124, 121–131. [Google Scholar] [CrossRef]
- Qin, Z.; Myers, D.B.; Ransom, C.J.; Kitchen, N.R.; Liang, S.; Camberato, J.J.; Carter, P.R.; Ferguson, R.; Fernandez, F.G.; Franzen, D.W.; et al. Application of Machine Learning Methodologies for Predicting Corn Economic Optimal Nitrogen Rate. Agron. J. 2018, 110, 2596–2607. [Google Scholar] [CrossRef]
- Jan, T.; Vaclav, V. The current state of the issue of information needs and dispositions among small Czech farms. Agric. Econ. (Zemědělská Ekon.) 2017, 63, 164–174. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Q.; Song, L.; Chen, Y. Attention-based recurrent neural networks for accurate short-term and long-term dissolved oxygen prediction. Comput. Electron. Agric. 2019, 165, 104964. [Google Scholar] [CrossRef]
- Chen, Y.; Xu, J.; Yu, H.; Zhen, Z.; Li, D. Three-dimensional short-term prediction model of dissolved oxygen content based on pso-bpann algorithm coupled with kriging interpolation. Math. Probl. Eng. 2016, 2016, 6564202. [Google Scholar] [CrossRef]
- Wang, L.; Feng, J.; Sui, X.; Chu, X.; Mu, W. Agricultural product price forecasting methods: Research advances and trend. Brit. Food J. 2020, 122, 2121–2138. [Google Scholar] [CrossRef]
- Hamrani, A.; Akbarzadeh, A.; Madramootoo, C.A. Machine learning for predicting greenhouse gas emissions from agricultural soils. Sci. Total Environ. 2020, 741, 140338. [Google Scholar] [CrossRef]
- Saranya, C.P.; Nagarajan, N. Efficient agricultural yield prediction using metaheuristic optimized artificial neural network using Hadoop framework. Soft Comput. 2020, 24, 12659–12669. [Google Scholar] [CrossRef]
- Mostafaeipour, A.; Fakhrzad, M.B.; Gharaat, S.; Jahangiri, M.; Dhanraj, J.A.; Shamshirband, S.; Issakhov, A.; Mosavi, A. Machine Learning for Prediction of Energy in Wheat Production. Agriculture 2020, 10, 517. [Google Scholar] [CrossRef]
- Yang, L.; Liu, Y.; Yu, H.; Fang, X.; Song, L.; Li, D.; He, L. Computer Vision Models in Intelligent Aquaculture with Emphasis on Fish Detection and Behavior Analysis: A Review. Arch. Comput. Methods E 2020. [Google Scholar] [CrossRef]
- Li, Y.; Chao, X. ANN-Based Continual Classification in Agriculture. Agriculture 2020, 10, 178. [Google Scholar] [CrossRef]
- Castro-Maldonado, J.J.; Patiño-Murillo, J.A.; Florian-Villa, A.E.; Guadrón-Guerrero, O.E. Application of computer vision and low-cost artificial intelligence for the identification of phytopathogenic factors in the agro-industry sector. J. Phys. Conf. Ser. 2018, 1126, 12022. [Google Scholar] [CrossRef]
- Li, D.; Wang, Z.; Wu, S.; Miao, Z.; Du, L.; Duan, Y. Automatic recognition methods of fish feeding behavior in aquaculture: A review. Aquaculture 2020, 528, 735508. [Google Scholar] [CrossRef]
- Zhao, J.; Bao, W.; Zhang, F.; Zhu, S.; Liu, Y.; Lu, H.; Shen, M.; Ye, Z. Modified motion influence map and recurrent neural network-based monitoring of the local unusual behaviors for fish school in intensive aquaculture. Aquaculture 2018, 493, 165–175. [Google Scholar] [CrossRef]
- Chen, C.; Zhu, W.; Steibel, J.; Siegford, J.; Wurtz, K.; Han, J.; Norton, T. Recognition of aggressive episodes of pigs based on convolutional neural network and long short-term memory. Comput. Electron. Agric. 2020, 169, 105166. [Google Scholar] [CrossRef]
- Yang, Q.; Xiao, D. A review of video-based pig behavior recognition. Appl. Anim. Behav. Sci. 2020, 233, 105146. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Valente, J.; Del Cerro, J.; Barrientos, A.; Ribeiro, A. A Multi-Robot Sense-Act Approach to Lead to a Proper Acting in Environmental Incidents. Sensors 2016, 16, 1269. [Google Scholar] [CrossRef]
- Li, D.; Wang, P.; Du, L. Path Planning Technologies for Autonomous Underwater Vehicles-A Review. IEEE Access 2019, 7, 9745–9768. [Google Scholar] [CrossRef]
- Barua, A.; Kalwa, J.; Shardt, Y.; Glotzbach, T. Path planning for an identification mission of an Autonomous Underwater Vehicle in a lemniscate form. IFAC Pap. 2018, 51, 323–328. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, Y.; Gong, C.; Chen, Y.; Yu, H. Applications of deep learning for dense scenes analysis in agriculture: A review. Sensors 2020, 20, 1520. [Google Scholar] [CrossRef]
- Chen, J.; Cao, X.; Hu, H.; Anthony, L. Agricultural product monitoring system supported by cloud computing. Clust. Comput. 2019, 22, 8929–8938. [Google Scholar] [CrossRef]
- Mokarram, M.; Khosravi, M.R. A cloud computing framework for analysis of agricultural big data based on Dempster—Shafer theory. J. Supercomput. 2020. [Google Scholar] [CrossRef]
- Chen, Y. Intelligent algorithms for cold chain logistics distribution optimization based on big data cloud computing analysis. J. Cloud Comput. 2020, 9. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, N.; Chen, Z. A cloud computing-enabled spatio-temporal cyber-physical information infrastructure for efficient soil moisture monitoring. ISPRS Int. J. Geo-Inf. 2016, 5, 81. [Google Scholar] [CrossRef]
- Liu, S.; Guo, L.; Webb, H.; Ya, X.; Chang, X. Internet of things monitoring system of modern eco-agriculture based on cloud computing. IEEE Access 2019, 7, 37050–37058. [Google Scholar] [CrossRef]
- Zamora-Izquierdo, M.A.; Santa, J.; Martínez, J.A.; Martínez, V.; Skarmeta, A.F. Smart farming IoT platform based on edge and cloud computing. Biosyst. Eng. 2019, 177, 4–17. [Google Scholar] [CrossRef]
- Xiang, L.; Bao, Y.; Tang, L.; Ortiz, D.; Salas-Fernandez, M.G. Automated morphological traits extraction for sorghum plants via 3D point cloud data analysis. Comput. Electron. Agric. 2019, 162, 951–961. [Google Scholar] [CrossRef]
- Kamienski, C.; Orcid, J.S.; Taumberger, M.; Dantas, R.; Toscano, A.; Cinotti, T.S.; Maia, R.F.; Neto, A.T. Smart Water Management Platform: IoT-Based Precision Irrigation for Agriculture. Sensors 2019, 19, 276. [Google Scholar] [CrossRef]
- Sharma, S.; Borse, R. Automatic Agriculture Spraying Robot with Smart Decision Making; Corchado Rodriguez, J.M., Mitra, S., Thampi, S.M., El-Alfy, E., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 743–758. [Google Scholar] [CrossRef]
- Singh, P.; Saikia, S. Arduino-based smart irrigation using water flow sensor, soil moisture sensor, temperature sensor and ESP8266 WiFi module. In Proceedings of the 2016 IEEE Region 10 Humanitarian Technology Conference (R10-HTC), Agra, India, 21–23 December 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Berckmans, D. General introduction to precision livestock farming. Anim. Front. 2017, 7, 6–11. [Google Scholar] [CrossRef]
- Saravanan, K.; Saraniya, S. Cloud IOT based novel livestock monitoring and identification system using UID. Sens. Rev. 2017, 38, 21–33. [Google Scholar] [CrossRef]
- Nóbrega, L.; Gonçalves, P.; Antunes, M.; Corujo, D. Assessing sheep behavior through low-power microcontrollers in smart agriculture scenarios. Comput. Electron. Agric. 2020, 173, 105444. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, Y.; Pan, J.; Ying, Y.; Zhou, H. A new method to manipulate broiler chicken growth and metabolism: Response to mixed LED light system. Sci. Rep. 2016, 6, 25972. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, J.L.; Xin, H.; Chai, L.; Millman, S.T. Effects of litter floor access and inclusion of experienced hens in aviary housing on floor eggs, litter condition, air quality, and hen welfare. Poult. Sci. 2018, 98, 1664–1677. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.Q.; Xin, H.W.; Teng, G.H.; Meng, C.Y.; Wang, C. Cloud-based data management system for automatic real-time data acquisition from large-scale laying-hen farms. Int. J. Agric. Biol. Eng. 2016, 9, 106–115. [Google Scholar] [CrossRef]
- Vroegindeweij, B.A.; Blaauw, S.K.; Ijsselmuiden, J.M.M.; Van, H.E.J. Evaluation of the performance of PoultryBot, an autonomous mobile robotic platform for poultry houses. Biosyst. Eng. 2018, 174, 295–315. [Google Scholar] [CrossRef]
- Vroegindeweij, B.A.; van Hell, S.; Ijsselmuiden, J.M.M.; van Henten, E.J. Object discrimination in poultry housing using spectral reflectivity. Biosyst. Eng. 2018, 167, 99–113. [Google Scholar] [CrossRef]
- Bonadies, S.; Lefcourt, A.; Gadsden, S.A. A survey of unmanned ground vehicles with applications to agricultural and environmental sensing. In Proceedings of the SPIE Commercial + Scientific Sensing and Imaging, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Gonzalez-De-Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Armada, M. Unmanned Ground Vehicles for Smart Farms. In Agronomy—Climate Change and Food Security; IntechOpen: London, UK, 2020. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Hahar, O.B.; Tuijl, B. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Birrell, S.; Hughes, J.; Cai, J.Y.; Iida, F. A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 2019, 37. [Google Scholar] [CrossRef]
- Jia, W.; Zhang, Y.; Lian, J.; Zheng, Y.; Li, C. Apple harvesting robot under information technology: A review. Int. J. Adv. Robot. Syst. 2020, 17, 255688461. [Google Scholar] [CrossRef]
- Chen, W.; Xu, T.; Liu, J.; Wang, M.; Zhao, D. Picking Robot Visual Servo Control Based on Modified Fuzzy Neural Network Sliding Mode Algorithms. Electronics 2019, 8, 605. [Google Scholar] [CrossRef]
- Ravalli, A.; Rossi, C.; Marrazza, G. Bio-inspired fish robot based on chemical sensors. Sens. Actuators B Chem. 2017, 239, 325–329. [Google Scholar] [CrossRef]
- Marrazza, G.; Ravalli, A.; Rossi, C. Fish Robot Based on Chemical Sensors for Water Monitoring. In Proceedings of the AISEM Annual Conference on Sensors and Microsystems, Lecce, Italy, 21–23 February 2017. [Google Scholar]
- Ryuh, Y.; Yang, G.; Liu, J.; Hu, H. A School of Robotic Fish for Mariculture Monitoring in the Sea Coast. J. Bionic Eng. 2015, 12, 37–46. [Google Scholar] [CrossRef]
- Koprowski, R.; Wróbel, Z.; Kleszcz, A.; Wilczyński, S.; Woźnica, A.; Łozowski, B.; Pilarczyk, M.; Karczewski, K.J.; Migula, P. Mobile sailing robot for automatic estimation of fish density and monitoring water quality. Biomed. Eng. Online 2013. [Google Scholar] [CrossRef]
- Von Borstel, F.D.; Suárez, J.; De La Rosa, E.; Gutiérrez, J. Feeding and water monitoring robot in aquaculture greenhouse. Ind. Robot. 2013, 40, 10–19. [Google Scholar] [CrossRef]
- Design and Motion Analysis of ROV Robot for Catching Sea Cucumber. Int. J. Simul. Syst. 2016, 17, 31–38. [CrossRef]
- Qiao, X.; Bao, J.; Zhang, H.; Zeng, L.; Li, D. Underwater image quality enhancement of sea cucumbers based on improved histogram equalization and wavelet transform. Inf. Process. Agric. 2017, 4, 206–213. [Google Scholar] [CrossRef]
- Takahata, K.; Shimizu, E.; Umeda, A.; Oode, T.; Tsuchiya, T.; Tamura, Y. Development of remotely operated unmanned boat with long-range Wi-Fi. Artif. Life Robot. 2016, 21, 365–370. [Google Scholar] [CrossRef]
- Tong, X.; Zhang, H.; Chen, W.; Zhao, P.; Leng, Z.; Cheng, K. A research on intelligent obstacle avoidance for unmanned surface vehicles. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 1431–1435. [Google Scholar] [CrossRef]
- Zeng, B.; Song, Y.; Liu, C. Design and implementation of an unmanned boat visual target tracking system. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 5225–5230. [Google Scholar] [CrossRef]
- Chen, H.; Wu, Z.; Zheng, R.; Zhang, S. Design of Autonomous Obstacle Avoidance Unmanned Boat System for Wetland Monitoring. J. Phys. Conf. Ser. 2020, 1486, 72033. [Google Scholar] [CrossRef]
- Ahn, S.; Lee, Y.; Yoo, J.; Lee, Y. Development and Verification of the Automated Cow-Feeding System Driven by AGV. Korea Acad. Ind. Coop. Soc. 2017, 18, 232–241. [Google Scholar] [CrossRef]
- Joffe, B.P.; Usher, C.T. Autonomous robotic system for picking up floor eggs in poultry houses. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017. [Google Scholar]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Yang, S.; Yang, X.; Mo, J. The application of unmanned aircraft systems to plant protection in China. Precis. Agric. 2017, 19, 278–292. [Google Scholar] [CrossRef]
- Manfreda, S.; Mccabe, M.F.; Miller, P.E.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Nyamuryekung, E.S.; Cibils, A.F.; Estell, R.E.; Gonzalez, A.L. Use of an Unmanned Aerial Vehicle−Mounted Video Camera to Assess Feeding Behavior of Raramuri Criollo Cows. Rangel. Ecol. Manag. 2016, 69, 386–389. [Google Scholar] [CrossRef]
- Deng, L.; Mao, Z.; Li, X.; Hu, Z.; Duan, F.; Yan, Y. UAV-based multispectral remote sensing for precision agriculture: A comparison between different cameras. ISPRS J. Photogramm. 2018, 146, 124–136. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Amer, G.; Mudassir, S.M.M.; Malik, M.A. Design and operation of Wi-Fi agribot integrated system. In Proceedings of the 2015 International Conference on Industrial Instrumentation and Control (ICIC), Pune, India, 28–30 May 2015; pp. 207–212. [Google Scholar] [CrossRef]
- Balafoutis, A.; Beck, B.; Fountas, S.; Vangeyte, J.; Wal, T.; Soto, I.; Gómez-Barbero, M.; Barnes, A.; Eory, V. Precision Agriculture Technologies Positively Contributing to GHG Emissions Mitigation, Farm Productivity and Economics. Sustainability 2017, 9, 1339. [Google Scholar] [CrossRef]
- Pivoto, D.; Barham, B.; Waquil, P.D.; Foguesatto, C.R.; Corte, V.F.D.; Zhang, D.; Talamini, E. Factors influencing the adoption of smart farming by Brazilian grain farmers. Int. Food Agribus. Manag. Rev. 2019, 22, 571–588. [Google Scholar] [CrossRef]
- Forecast Market Value of Smart Agriculture Worldwide in 2017 and 2022. Available online: https://www.statista.com/statistics/720062/market-value-smart-agriculture-worldwide/ (accessed on 15 November 2020).
- Hajjaj, S.S.H.; Sahari, K.S.M. Review of agriculture robotics: Practicality and feasibility. In Proceedings of the 2016 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), Tokyo, Japan, 17–20 December 2016; pp. 194–198. [Google Scholar] [CrossRef]
- Lioutas, E.D.; Charatsari, C. Smart farming and short food supply chains: Are they compatible? Land Use Policy 2020, 94, 104541. [Google Scholar] [CrossRef]
- Lioutas, E.D.; Charatsari, C.; La Rocca, G.; De Rosa, M. Key questions on the use of big data in farming: An activity theory approach. NJAS—Wagening. J. Life Sci. 2019, 90–91, 100297. [Google Scholar] [CrossRef]
- Bronson, K.; Knezevic, I. Big Data in food and agriculture. Big Data Soc. 2016, 3, 1245635505. [Google Scholar] [CrossRef]
- Shepherd, M.; Turner, J.A.; Small, B.; Wheeler, D. Priorities for science to overcome hurdles thwarting the full promise of the ‘digital agriculture’ revolution. J. Sci. Food Agric. 2020, 100, 5083–5092. [Google Scholar] [CrossRef] [PubMed]
- Fielke, S.; Taylor, B.; Jakku, E. Digitalisation of agricultural knowledge and advice networks: A state-of-the-art review. Agric. Syst 2020, 180, 102763. [Google Scholar] [CrossRef]
- Wiseman, L.; Sanderson, J.; Zhang, A.; Jakku, E. Farmers and their data: An examination of farmers’ reluctance to share their data through the lens of the laws impacting smart farming. NJAS—Wagening. J. Life Sci 2019, 90–91, 100301. [Google Scholar] [CrossRef]
- Jakku, E.; Taylor, B.; Fleming, A.; Mason, C.; Fielke, S.; Sounness, C.; Thorburn, P. “If they don’t tell us what they do with it, why would we trust them?” Trust, transparency and benefit-sharing in Smart Farming. NJAS—Wagening. J. Life Sci. 2019, 90–91, 100285. [Google Scholar] [CrossRef]
- Scholz, R. Sustainable Digital Environments: What Major Challenges Is Humankind Facing? Sustainability 2016, 8, 726. [Google Scholar] [CrossRef]
- Kendall, H.; Naughton, P.; Clark, B.; Taylor, J.; Li, Z.; Zhao, C.; Yang, G.; Chen, J.; Frewer, L.J. Precision Agriculture in China: Exploring Awareness, Understanding, Attitudes and Perceptions of Agricultural Experts and End-Users in China. Adv. Anim. Biosci. 2017, 8, 703–707. [Google Scholar] [CrossRef]
- Şekerli, Y.E.; Say, S.M.; Keskin, M.; Şehri, M.; Dündar, M.Ş.; Şişman, A. Adoption of precision agriculture technologies in developed and developing countries. J. Sci. Technol. 2018, 8, 7–15. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Agri Sectors | Technologies | ||
|---|---|---|---|---|
| Easiest | Crop |
| Sensing and Communication |
|
| Floricultural greenhouses |
| |||
| to | Poultry industry |
| Big Data |
|
| Aquaculture |
| AI |
| |
| Hardest | Fruit and vegetables |
| ||
| Animal husbandry |
| Robots |
| |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Xu, X.; Wang, C.; Li, Z.; Li, D. From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production. Agriculture 2021, 11, 145. https://doi.org/10.3390/agriculture11020145
Wang T, Xu X, Wang C, Li Z, Li D. From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production. Agriculture. 2021; 11(2):145. https://doi.org/10.3390/agriculture11020145
Chicago/Turabian StyleWang, Tan, Xianbao Xu, Cong Wang, Zhen Li, and Daoliang Li. 2021. "From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production" Agriculture 11, no. 2: 145. https://doi.org/10.3390/agriculture11020145
APA StyleWang, T., Xu, X., Wang, C., Li, Z., & Li, D. (2021). From Smart Farming towards Unmanned Farms: A New Mode of Agricultural Production. Agriculture, 11(2), 145. https://doi.org/10.3390/agriculture11020145