Wireless Sensor Network Synchronization for Precision Agriculture Applications

 ,
,  , , , , , ,
, , , , , ,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Related Work
2.1. WSNs in the Agricultural Domain
2.2. WSNs Challenges and Opportunities
2.3. Synchronization in WSNs
3. System Setup
3.1. Design Requirements
3.2. Proposed System
3.2.1. Arduino Board
3.2.2. XBee Modules and Arduino Wireless SD Shield
3.2.3. Sensors
3.2.4. Power Supply
3.3. Design Summary and Realistic Deployment
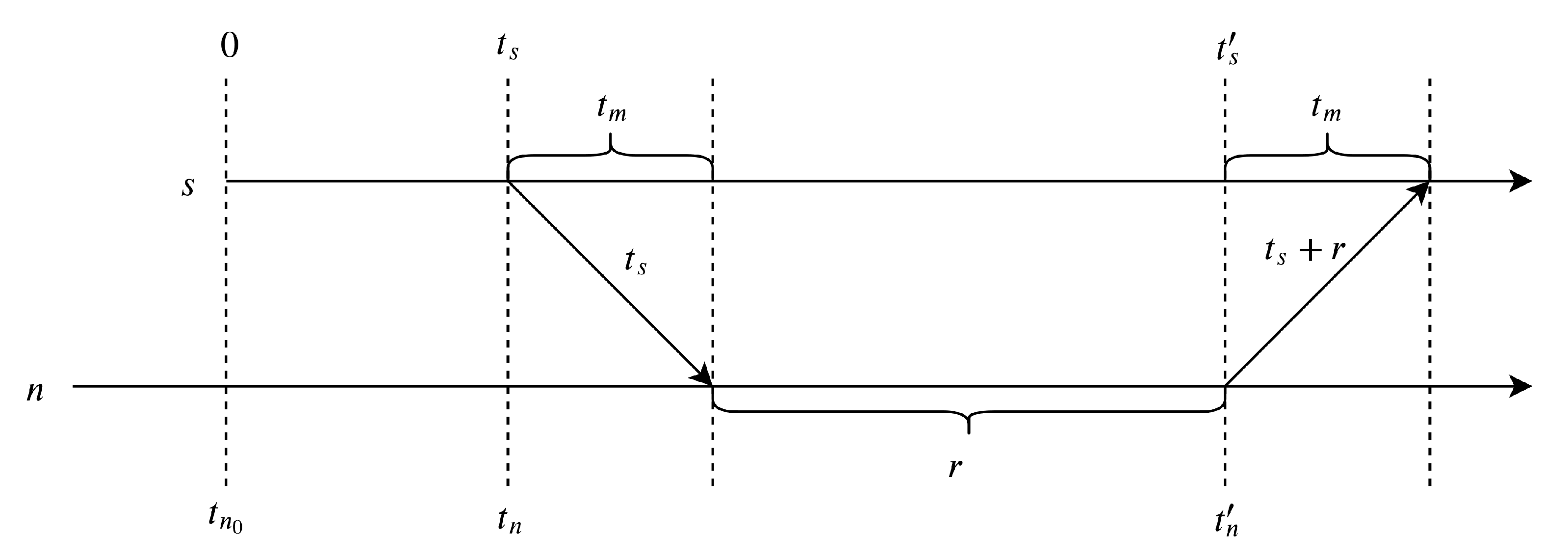
4. Proposed Measurement Synchronization Scheme
5. Experiments and Results
5.1. Test Environment
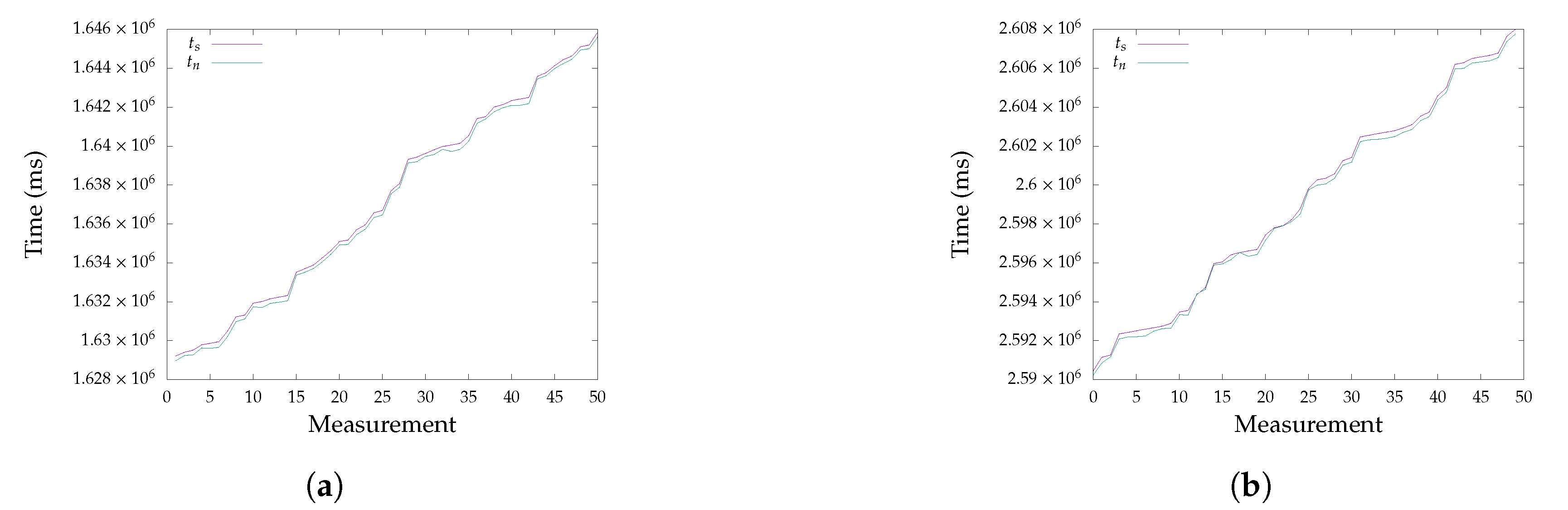
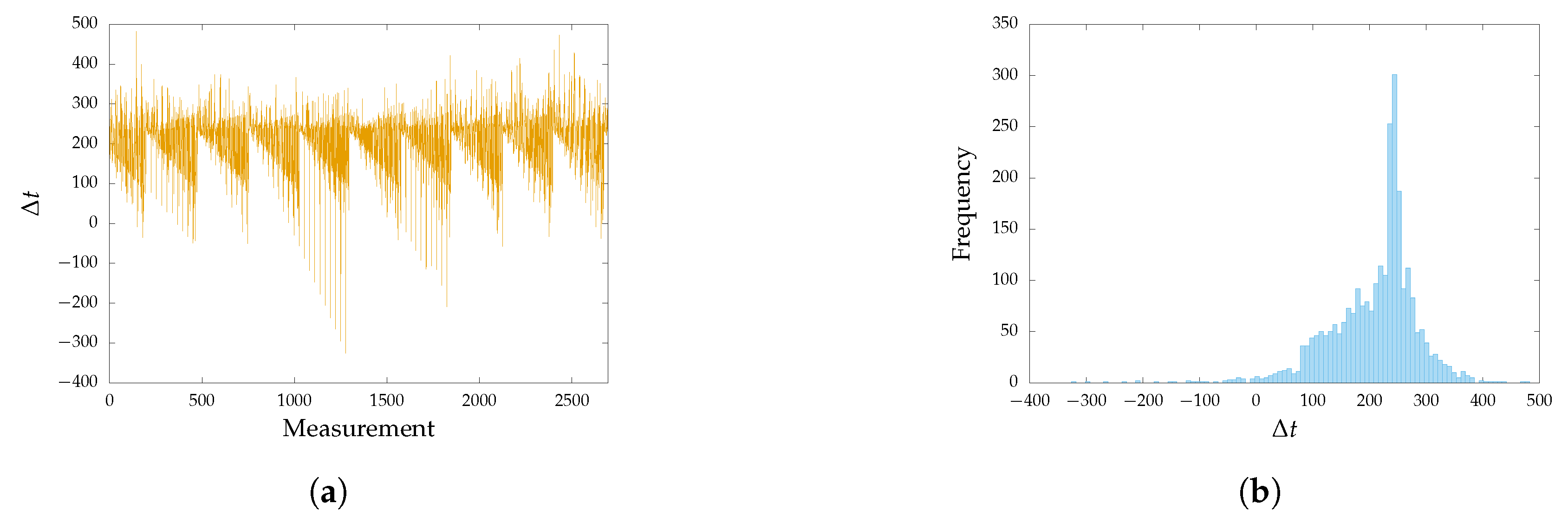
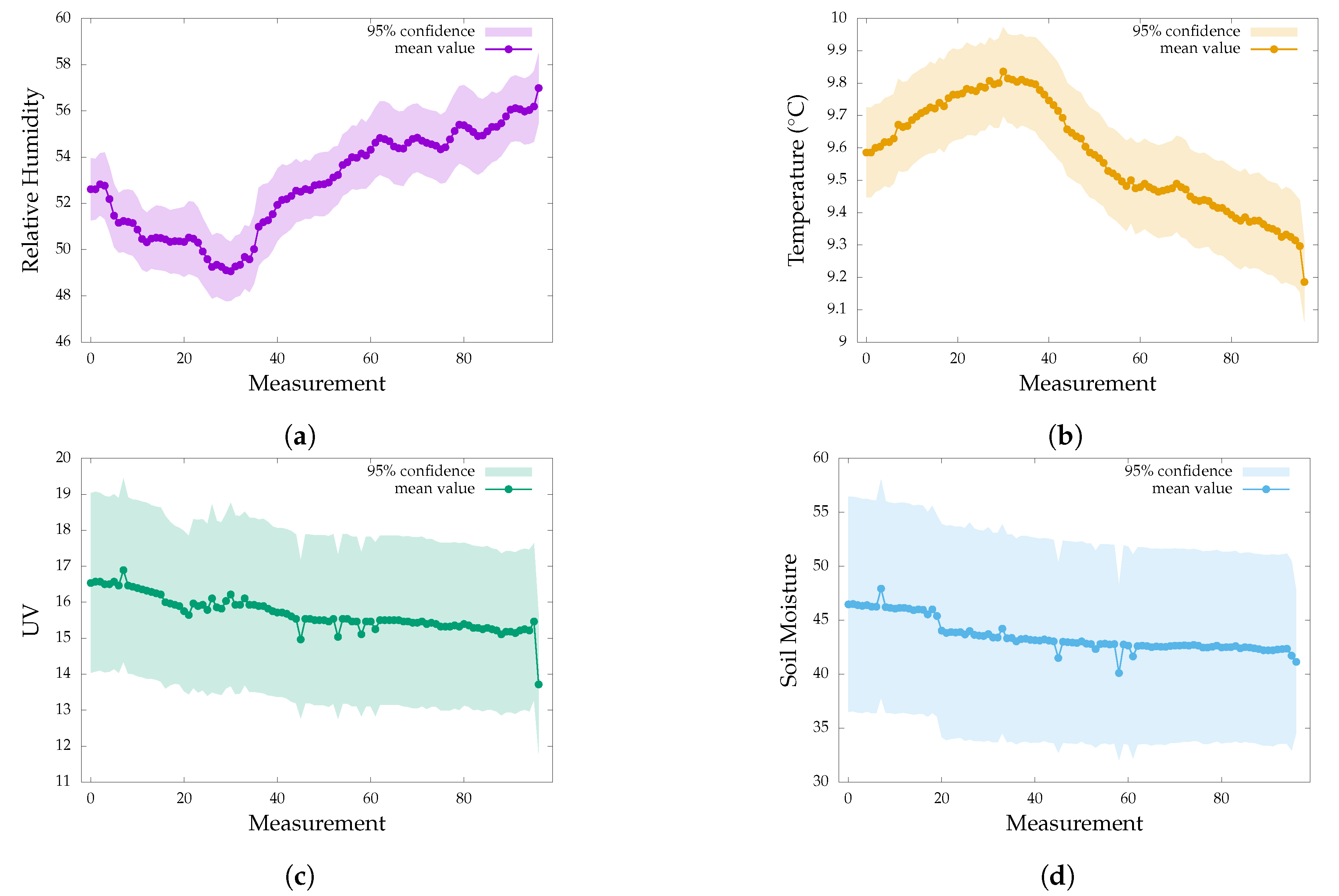
5.2. Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 5G | Fifth Generation of Cellular Network Technology |
| API | Application Programming Interface |
| AT | Attention |
| IoT | Internet of Things |
| WSN | Wireless Sensor Network |
| SD | Secure Digital |
| UV | Ultraviolet |
References
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Baggio, A. Wireless sensor networks in precision agriculture. In Proceedings of the ACM Workshop on Real-World Wireless Sensor Networks (REALWSN 2005), Stockholm, Sweden, 20–21 June 2005; Volume 20, pp. 1567–1576. [Google Scholar]
- Tan, L.; Wang, N. Future internet: The Internet of Things. In Proceedings of the 2010 3rd International Conference on Advanced Computer Theory and Engineering(ICACTE), Chengdu, China, 20–22 August 2010; Volume 5, pp. V5:376–V5:380. [Google Scholar] [CrossRef]
- Grift, T. The first word: The farm of the future. Resour. Mag. 2011, 18, 1. [Google Scholar]
- Kamilaris, A.; Gao, F.; Prenafeta-Boldu, F.X.; Ali, M.I. Agri-IoT: A semantic framework for Internet of Things-enabled smart farming applications. In Proceedings of the 2016 IEEE 3rd World Forum on Internet of Things (WF-IoT), Reston, VA, USA, 12–14 December 2016; pp. 442–447. [Google Scholar]
- Adams, R.M.; Hurd, B.H.; Lenhart, S.; Leary, N. Effects of global climate change on agriculture: An interpretative review. Clim. Res. 1998, 11, 19–30. [Google Scholar] [CrossRef]
- Westermann, O.; Förch, W.; Thornton, P.; Körner, J.; Cramer, L.; Campbell, B. Scaling up agricultural interventions: Case studies of climate-smart agriculture. Agric. Syst. 2018, 165, 283–293. [Google Scholar] [CrossRef]
- Channe, H.; Kothari, S.; Kadam, D. Multidisciplinary model for smart agriculture using internet-of-things (IoT), sensors, cloud-computing, mobile-computing & big-data analysis. Int. J. Comput. Technol. Appl. 2015, 6, 374–382. [Google Scholar]
- Lin, J.; Shen, Z.; Zhang, A.; Chai, Y. Blockchain and IoT Based Food Traceability for Smart Agriculture. In Proceedings of the 3rd International Conference on Crowd Science and Engineering, ACM, Singapore, 28–31 July 2018; pp. 3:1–3:6. [Google Scholar] [CrossRef]
- Klytchnikova, I.I.; Sadler, M.P.; Townsend, R.; Edmeades, S.; Choudhary, V.; Hussain, S.; Kray, H.A.; Fernandes, E.C.; Moses, E.; Cantrell, J.T.; et al. Future of Food: Shaping a Climate-Smart Global Food System; World Bank Group: Washington, DC, USA, 2015. [Google Scholar]
- Bacco, M.; Berton, A.; Ferro, E.; Gennaro, C.; Gotta, A.; Matteoli, S.; Paonessa, F.; Ruggeri, M.; Virone, G.; Zanella, A. Smart farming: Opportunities, challenges and technology enablers. In Proceedings of the 2018 IoT Vertical and Topical Summit on Agriculture—Tuscany (IOT Tuscany), Tuscany, Italy, 8–9 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Lamport, L. Time, clocks, and the ordering of events in a distributed system. Commun. ACM 1978, 21, 558–565. [Google Scholar] [CrossRef]
- Sivrikaya, F.; Yener, B. Time synchronization in sensor networks: A survey. IEEE Netw. 2004, 18, 45–50. [Google Scholar] [CrossRef]
- Tavares Bruscato, L.; Heimfarth, T.; Pignaton de Freitas, E. Enhancing time synchronization support in wireless sensor networks. Sensors 2017, 17, 2956. [Google Scholar] [CrossRef]
- Andrade-Sanchez, P.; Pierce, F.J.; Elliott, T.V. Performance assessment of wireless sensor networks in agricultural settings. In Proceedings of the 2007 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, Minneapolis, MN, USA, 17–20 June 2007; p. 1. [Google Scholar]
- Felemban, E. Advanced border intrusion detection and surveillance using wireless sensor network technology. Int. J. Commun. Netw. Syst. Sci. 2013, 6, 251. [Google Scholar] [CrossRef]
- Giordano, S.; Seitanidis, I.; Ojo, M.; Adami, D.; Vignoli, F. IoT solutions for crop protection against wild animal attacks. In Proceedings of the 2018 IEEE International Conference on Environmental Engineering (EE), Milan, Italy, 12–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Arduino. Arduino Uno Rev3. Available online: https://store.arduino.cc/arduino-uno-rev3 (accessed on 14 December 2019).
- Arduino. Arduino Mega 2560 Rev3. Available online: https://store.arduino.cc/mega-2560-r3 (accessed on 14 December 2019).
- Digi. XBee-PRO Zigbee Through-Hole (Wire Antenna). Available online: https://www.digi.com/products/models/xbp24cz7wit-004 (accessed on 14 December 2019).
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Yin, C.; Xiong, Z.; Chen, H.; Wang, J.; Cooper, D.; David, B. A literature survey on smart cities. Sci. China Inf. Sci. 2015, 58, 1–18. [Google Scholar] [CrossRef]
- Arasteh, H.; Hosseinnezhad, V.; Loia, V.; Tommasetti, A.; Troisi, O.; Shafie-Khah, M.; Siano, P. Iot-based smart cities: A survey. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar]
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A survey on sensor networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef]
- Akyildiz, I.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless sensor networks: A survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Alemdar, H.; Ersoy, C. Wireless sensor networks for healthcare: A survey. Comput. Netw. 2010, 54, 2688–2710. [Google Scholar] [CrossRef]
- Güngör, V.Ç.; Hancke, G.P. Industrial Wireless Sensor Networks: Applications, Protocols, and Standards; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Da Xu, L.; He, W.; Li, S. Internet of things in industries: A survey. IEEE Trans. Ind. Informatics 2014, 10, 2233–2243. [Google Scholar]
- Xu, G.; Shen, W.; Wang, X. Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Netw. 2006, 20, 12. [Google Scholar]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Valente, J.; Sanz, D.; Barrientos, A.; Cerro, J.d.; Ribeiro, Á.; Rossi, C. An air-ground wireless sensor network for crop monitoring. Sensors 2011, 11, 6088–6108. [Google Scholar] [CrossRef]
- Yi, W.Y.; Lo, K.M.; Mak, T.; Leung, K.S.; Leung, Y.; Meng, M.L. A survey of wireless sensor network based air pollution monitoring systems. Sensors 2015, 15, 31392–31427. [Google Scholar] [CrossRef]
- Noel, A.B.; Abdaoui, A.; Elfouly, T.; Ahmed, M.H.; Badawy, A.; Shehata, M.S. Structural health monitoring using wireless sensor networks: A comprehensive survey. IEEE Commun. Surv. Tutorials 2017, 19, 1403–1423. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Xu, M. The coverage problem in UAV network: A survey. In Proceedings of the Fifth International Conference on Computing, Communications and Networking Technologies (ICCCNT), Hefei, China, 11–13 July 2014; pp. 1–5. [Google Scholar]
- Đurišić, M.P.; Tafa, Z.; Dimić, G.; Milutinović, V. A survey of military applications of wireless sensor networks. In Proceedings of the 2012 Mediterranean conference on embedded computing (MECO), Bar, Montenegro, 19–21 June 2012; pp. 196–199. [Google Scholar]
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, I. A review of wireless sensor technologies and applications in agriculture and food industry: State of the art and current trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed]
- Rehman, A.-U.; Abbasi, A.Z.; Islam, N.; Shaikh, Z.A. A review of wireless sensors and networks’ applications in agriculture. Comput. Stand. Interfaces 2014, 36, 263–270. [Google Scholar] [CrossRef]
- Anisi, M.H.; Abdul-Salaam, G.; Abdullah, A.H. A survey of wireless sensor network approaches and their energy consumption for monitoring farm fields in precision agriculture. Precis. Agric. 2015, 16, 216–238. [Google Scholar] [CrossRef]
- Srbinovska, M.; Gavrovski, C.; Dimcev, V.; Krkoleva, A.; Borozan, V. Environmental parameters monitoring in precision agriculture using wireless sensor networks. J. Clean. Prod. 2015, 88, 297–307. [Google Scholar] [CrossRef]
- Ojha, T.; Misra, S.; Raghuwanshi, N.S. Wireless sensor networks for agriculture: The state-of-the-art in practice and future challenges. Comput. Electron. Agric. 2015, 118, 66–84. [Google Scholar] [CrossRef]
- Jawad, H.M.; Nordin, R.; Gharghan, S.K.; Jawad, A.M.; Ismail, M. Energy-efficient wireless sensor networks for precision agriculture: A review. Sensors 2017, 17, 1781. [Google Scholar] [CrossRef]
- Baronti, P.; Pillai, P.; Chook, V.W.; Chessa, S.; Gotta, A.; Hu, Y.F. Wireless sensor networks: A survey on the state of the art and the 802.15.4 and ZigBee standards. Comput. Commun. 2007, 30, 1655–1695. [Google Scholar] [CrossRef]
- Kumar, S.A.; Ilango, P. The impact of wireless sensor network in the field of precision agriculture: A review. Wirel. Pers. Commun. 2018, 98, 685–698. [Google Scholar] [CrossRef]
- Popović, T.; Latinović, N.; Pešić, A.; Zečević, Ž.; Krstajić, B.; Djukanović, S. Architecting an IoT-enabled platform for precision agriculture and ecological monitoring: A case study. Comput. Electron. Agric. 2017, 140, 255–265. [Google Scholar] [CrossRef]
- Azfar, S.; Nadeem, A.; Alkhodre, A.; Ahsan, K.; Mehmood, N.; Alghmdi, T.; Alsaawy, Y. Monitoring, Detection and Control Techniques of Agriculture Pests and Diseases using Wireless Sensor Network: A Review. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 424–433. [Google Scholar] [CrossRef]
- Azfar, S.; Nadeem, A.; Basit, A. Pest detection and control techniques using wireless sensor network: A review. J. Entomol. Zool. Stud. 2015, 3, 92–99. [Google Scholar]
- Yu, X.; Wu, P.; Han, W.; Zhang, Z. Overview of wireless underground sensor networks for agriculture. Afr. J. Biotechnol. 2012, 11, 3942–3948. [Google Scholar]
- Moribe, T.; Okada, H.; Kobayashl, K.; Katayama, M. Combination of a wireless sensor network and drone using infrared thermometers for smart agriculture. In Proceedings of the 2018 15th IEEE Annual Consumer Communications Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Blackmore, S.; Stout, B.; Wang, M.; Runov, B. Robotic agriculture–the future of agricultural mechanisation. In Proceedings of the 5th European Conference on Precision Agriculture, Uppsala, Sweden, 9–12 June 2005; pp. 621–628. [Google Scholar]
- Sykuta, M.E. Big data in agriculture: Property rights, privacy and competition in ag data services. Int. Food Agribus. Manag. Rev. 2016, 19, 57–74. [Google Scholar]
- Ali, R.; Pal, A.K.; Kumari, S.; Karuppiah, M.; Conti, M. A secure user authentication and key-agreement scheme using wireless sensor networks for agriculture monitoring. Future Gener. Comput. Syst. 2018, 84, 200–215. [Google Scholar] [CrossRef]
- Mekala, M.S.; Viswanathan, P. A Survey: Smart agriculture IoT with cloud computing. In Proceedings of the 2017 International Conference on Microelectronic Devices, Circuits and Systems (ICMDCS), Vellore, India, 10–12 August 2017; pp. 1–7. [Google Scholar]
- Mekala, M.S.; Viswanathan, P. A novel technology for smart agriculture based on IoT with cloud computing. In Proceedings of the 2017 International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud)(I-SMAC), Coimbatore, India, 10–11 February 2017; pp. 75–82. [Google Scholar]
- Banzi, M.; Shiloh, M. Getting Started with Arduino: The Open Source Electronics Prototyping Platform; Maker Media, Inc.: North Sebastopol, CA, USA, 2014. [Google Scholar]
- Satyanarayana, G.; Mazaruddin, S. Wireless sensor based remote monitoring system for agriculture using ZigBee and GPS. In Proceedings of the Conference on Advances in Communication and Control Systems-2013, Mumbai, India, 18–19 January 2013. [Google Scholar]
- Papamichail, A.; Alvanou, A.G.; Zervopoulos, A.; Bezas, K.; Vergis, S.; Koufoudakis, G.; Oikonomou, K.; Tsoumanis, G. Description of the Ionian University’s Campus Wireless Network Testbed Infrastructure. In Proceedings of the 2019 South Eastern European Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Piraeus, Greece, 20–22 September 2019. [Google Scholar]
- Kooijman, M. Building Wireless Sensor Networks Using Arduino; Packt Publishing Ltd.: Birmingham, UK, 2015. [Google Scholar]
- Upton, E.; Halfacree, G. Raspberry Pi User Guide; John Wiley & Sons: Chichester, West Sussex, UK, 2014. [Google Scholar]
- Saari, M.; bin Baharudin, A.M.; Hyrynsalmi, S. Survey of prototyping solutions utilizing Raspberry Pi. In Proceedings of the 2017 40th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 22–26 May 2017; pp. 991–994. [Google Scholar]
- Cabaccan, C.N.; Cruz, F.R.G.; Agulto, I.C. Wireless sensor network for agricultural environment using raspberry pi based sensor nodes. In Proceedings of the 2017 IEEE 9th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Pasay, Manila, Philippines, 1–3 December 2017; pp. 1–5. [Google Scholar]
- Nundloll, V.; Porter, B.; Blair, G.S.; Emmett, B.; Cosby, J.; Jones, D.L.; Chadwick, D.; Winterbourn, B.; Beattie, P.; Dean, G.; et al. The Design and Deployment of an End-To-End IoT Infrastructure for the Natural Environment. Future Internet 2019, 11, 129. [Google Scholar] [CrossRef]
- Nikhade, S.G. Wireless sensor network system using Raspberry Pi and zigbee for environmental monitoring applications. In Proceedings of the 2015 International Conference on Smart Technologies and Management for Computing, Communication, Controls, Energy and Materials (ICSTM), Chennai, India, 6–8 May 2015; pp. 376–381. [Google Scholar]
- Flores, K.O.; Butaslac, I.M.; Gonzales, J.E.M.; Dumlao, S.M.G.; Reyes, R.S. Precision agriculture monitoring system using wireless sensor network and Raspberry Pi local server. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016; pp. 3018–3021. [Google Scholar]
- Guardo, E.; Di Stefano, A.; La Corte, A.; Sapienza, M.; Scatà, M. A Fog Computing-based IoT Framework for Precision Agriculture. J. Internet Technol. 2018, 19, 1401–1411. [Google Scholar]
- Catania, P.; Vallone, M.; Re, G.L.; Ortolani, M. A wireless sensor network for vineyard management in Sicily (Italy). Agric. Eng. Int. CIGR J. 2013, 15, 139–146. [Google Scholar]
- Jeličić, V.; Ražov, T.; Oletić, D.; Kuri, M.; Bilas, V. MasliNET: A Wireless Sensor Network based environmental monitoring system. In Proceedings of the 2011 34th International Convention MIPRO, Opatija, Croatia, 23–27 May 2011; pp. 150–155. [Google Scholar]
- Lipper, L.; Thornton, P.; Campbell, B.M.; Baedeker, T.; Braimoh, A.; Bwalya, M.; Caron, P.; Cattaneo, A.; Garrity, D.; Henry, K.; et al. Climate-smart agriculture for food security. Nat. Clim. Chang. 2014, 4, 1068–1072. [Google Scholar] [CrossRef]
- Castillo-Cara, M.; Huaranga-Junco, E.; Quispe-Montesinos, M.; Orozco-Barbosa, L.; Antúnez, E.A. FROG: A robust and green wireless sensor node for fog computing platforms. J. Sensors 2018, 2018. [Google Scholar] [CrossRef]
- Chlingaryan, A.; Sukkarieh, S.; Whelan, B. Machine learning approaches for crop yield prediction and nitrogen status estimation in precision agriculture: A review. Comput. Electron. Agric. 2018, 151, 61–69. [Google Scholar] [CrossRef]
- Jha, K.; Doshi, A.; Patel, P.; Shah, M. A comprehensive review on automation in agriculture using artificial intelligence. Artif. Intell. Agric. 2019. [Google Scholar] [CrossRef]
- Hamouda, Y.; Msallam, M. Variable sampling interval for energy-efficient heterogeneous precision agriculture using Wireless Sensor Networks. J. King Saud Univ. Comput. Inf. Sci. 2018. [Google Scholar] [CrossRef]
- Tsoumanis, G.; Oikonomou, K.; Koufoudakis, G.; Aïssa, S. Energy-Efficient Sink Placement in Wireless Sensor Networks. Comput. Netw. 2018, 141, 166–178. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Sadler, B.M.; Swami, A. Synchronization in Sensor Networks: An Overview. In Proceedings of the IEEE Military Communications Conference (MILCOM), Washington, DC, USA, 23–25 October 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Q.; Rus, D. Global clock synchronization in sensor networks. IEEE Trans. Comput. 2006, 55, 214–226. [Google Scholar]
- Elsts, A.; Fafoutis, X.; Duquennoy, S.; Oikonomou, G.; Piechocki, R.; Craddock, I. Temperature-resilient time synchronization for the internet of things. IEEE Trans. Ind. Inform. 2017, 14, 2241–2250. [Google Scholar] [CrossRef]
- Elson, J.; Römer, K. Wireless sensor networks: A new regime for time synchronization. ACM SIGCOMM Comput. Commun. Rev. 2003, 33, 149–154. [Google Scholar] [CrossRef]
- Mani, S.K.; Durairajan, R.; Barford, P.; Sommers, J. An Architecture for IoT Clock Synchronization. In Proceedings of the 8th International Conference on the Internet of Things, Association for Computing Machinery, Santa Barbara, CA, USA, 15–18 October 2018. [Google Scholar] [CrossRef]
- Skiadopoulos, K.; Tsipis, A.; Giannakis, K.; Koufoudakis, G.; Christopoulou, E.; Oikonomou, K.; Kormentzas, G.; Stavrakakis, I. Synchronization of data measurements in wireless sensor networks for IoT applications. Ad Hoc Netw. 2019, 89, 47–57. [Google Scholar] [CrossRef]
- Bezas, K.; Komianos, V.; Oikonomou, K.; Koufoudakis, G.; Tsoumanis, G. Structural Health Monitoring In Historical Buildings Using A Low Cost Wireless Sensor Network. In Proceedings of the 2019 4th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Piraeus, Greece, 20–25 September 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Seah, W.K.; Eu, Z.A.; Tan, H.P. Wireless sensor networks powered by ambient energy harvesting (WSN-HEAP)-Survey and challenges. In Proceedings of the Wireless VITAE 2009, 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology, Aalborg, Denmark, 17 May 2009; pp. 1–5. [Google Scholar]
- Arduino. Arduino Nano. Available online: https://store.arduino.cc/arduino-nano (accessed on 14 December 2019).
- Digi. XBee®/XBee-PRO S2C Zigbee® RF Module User Guide. Available online: https://tinyurl.com/y5posdyh (accessed on 14 December 2019).
- Farahani, S. ZigBee Wireless Networks and Transceivers; Newnes, Elsevier: Burlington, MA, USA, 2011. [Google Scholar]
- Arduino. Arduino Wireless SD Shield. Available online: https://store.arduino.cc/arduino-wirelss-sd-shield (accessed on 14 December 2019).
- Kingston. MicroSDHC Class 4 Memory Card. Available online: https://www.kingston.com/us/memory-cards/microsdhc-card-class-4 (accessed on 14 December 2019).
- Andrewrapp. xbee-arduino. Available online: https://github.com/andrewrapp/xbee-arduino (accessed on 14 December 2019).
- SparkFun. Humidity and Temperature Sensor - RHT03. Available online: https://www.sparkfun.com/products/10167 (accessed on 14 December 2019).
- Vishay. VEML6070 UVA Light Sensor With I2C Interface. Available online: https://www.vishay.com/ppg?84277 (accessed on 14 December 2019).
- oddWires. YL-69 Soil Hygrometer Humidity & Soil Moisture Detection Sensor. Available online: https://www.oddwires.com/yl-69-soil-hygrometer-humidity-soil-moisture-detection-sensor/ (accessed on 14 December 2019).
- InvenSense. MPU-6050. Available online: https://www.invensense.com/products/motion-tracking/6-axis/mpu-6050/ (accessed on 14 December 2019).
- Sandberg. Sandberg Outdoor Solar Powerbank 16000. Available online: https://sandberg.it/en-mt/product/Outdoor-Solar-Powerbank-16000 (accessed on 14 December 2019).
- Yu, J.; Wang, N.; Wang, G.; Yu, D. Connected dominating sets in wireless ad hoc and sensor networks—A comprehensive survey. Comput. Commun. 2013, 36, 121–134. [Google Scholar] [CrossRef]
- Morvan, D.; Dupuy, J. Modeling the propagation of a wildfire through a Mediterranean shrub using a multiphase formulation. Combust. Flame 2004, 138, 199–210. [Google Scholar] [CrossRef]
- Theopoulos, A.; Boursianis, A.; Koukounaras, A.; Samaras, T. Prototype wireless sensor network for real-time measurements in hydroponics cultivation. In Proceedings of the 2018 7th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2018; pp. 1–4. [Google Scholar]
- Kassim, M.R.M.; Harun, A.N.; Yusoff, I.M.; Mat, I.; Kuen, C.P.; Rahmad, N. Applications of wireless sensor networks in Shiitake Mushroom cultivation. In Proceedings of the 2017 Eleventh International Conference on Sensing Technology (ICST), Sydney, Australia, 4–6 December 2017; pp. 1–6. [Google Scholar]
- Capra, A.; Scicolone, B. Irrigation Scheduling Optimisation in Olive Groves. J. Exp. Agric. Int. 2018. [Google Scholar] [CrossRef]
- Vicente-Charlesworth, L.; Galmés, S. On the development of a sensor network-based system for wildfire prevention. In Proceedings of the International Conference on Cooperative Design, Visualization and Engineering, Hong Kong, China, 11–14 September 2011; pp. 53–60. [Google Scholar]
- Chliyeh, M.; Touati, J.; Selmaoui, K.; Touhami, A.O.; Filali-Maltouf, A.; El Modafar, C.; Douira, A. Bibliographic inventory of the olive tree (Olea europaea L.) fungal diseases in the world. Int. J. Pure Appl. Biosci. 2014, 2, 46–79. [Google Scholar]
- Broufas, G.D.; Pappas, M.L.; Koveos, D.S. Effect of Relative Humidity on Longevity, Ovarian Maturation, and Egg Production in the Olive Fruit Fly (Diptera: Tephritidae). Ann. Entomol. Soc. Am. 2009, 102, 70–75. [Google Scholar] [CrossRef]
- Koubouris, G.C.; Metzidakis, I.T.; Vasilakakis, M.D. Impact of temperature on olive (Olea europaea L.) pollen performance in relation to relative humidity and genotype. Environ. Exp. Bot. 2009, 67, 209–214. [Google Scholar] [CrossRef]
- Cruz, M.G. Monte Carlo-based ensemble method for prediction of grassland fire spread. Int. J. Wildland Fire 2010, 19, 521–530. [Google Scholar] [CrossRef]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zervopoulos, A.; Tsipis, A.; Alvanou, A.G.; Bezas, K.; Papamichail, A.; Vergis, S.; Stylidou, A.; Tsoumanis, G.; Komianos, V.; Koufoudakis, G.; et al. Wireless Sensor Network Synchronization for Precision Agriculture Applications. Agriculture 2020, 10, 89. https://doi.org/10.3390/agriculture10030089
Zervopoulos A, Tsipis A, Alvanou AG, Bezas K, Papamichail A, Vergis S, Stylidou A, Tsoumanis G, Komianos V, Koufoudakis G, et al. Wireless Sensor Network Synchronization for Precision Agriculture Applications. Agriculture. 2020; 10(3):89. https://doi.org/10.3390/agriculture10030089
Chicago/Turabian StyleZervopoulos, Alexandros, Athanasios Tsipis, Aikaterini Georgia Alvanou, Konstantinos Bezas, Asterios Papamichail, Spiridon Vergis, Andreana Stylidou, Georgios Tsoumanis, Vasileios Komianos, George Koufoudakis, and et al. 2020. "Wireless Sensor Network Synchronization for Precision Agriculture Applications" Agriculture 10, no. 3: 89. https://doi.org/10.3390/agriculture10030089
APA StyleZervopoulos, A., Tsipis, A., Alvanou, A. G., Bezas, K., Papamichail, A., Vergis, S., Stylidou, A., Tsoumanis, G., Komianos, V., Koufoudakis, G., & Oikonomou, K. (2020). Wireless Sensor Network Synchronization for Precision Agriculture Applications. Agriculture, 10(3), 89. https://doi.org/10.3390/agriculture10030089