On Nonlinear Regression for Trends in Split-Belt Treadmill Training




Abstract
:1. Introduction
2. Materials and Methods
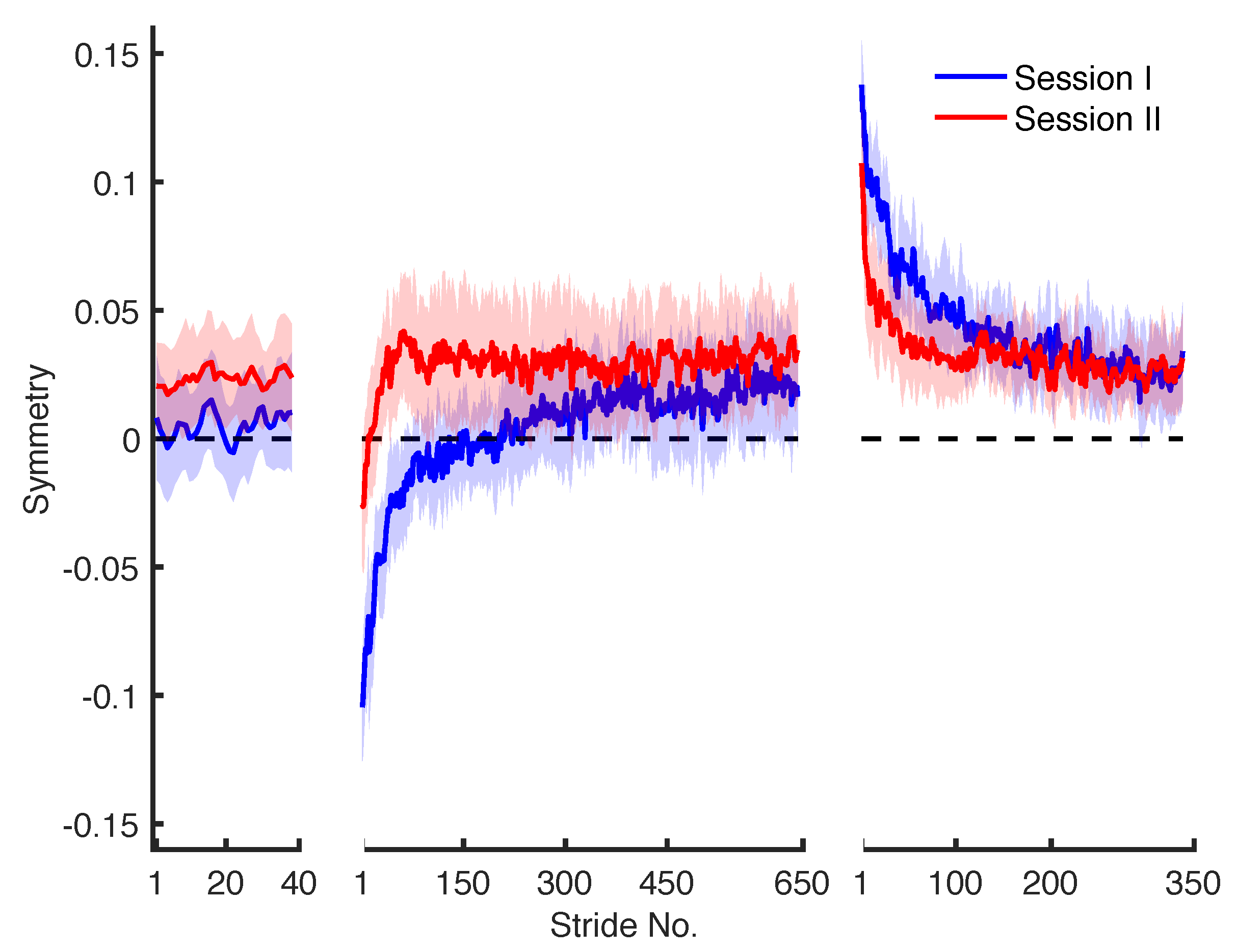
2.1. Experimental Dataset
2.2. Exponential Models
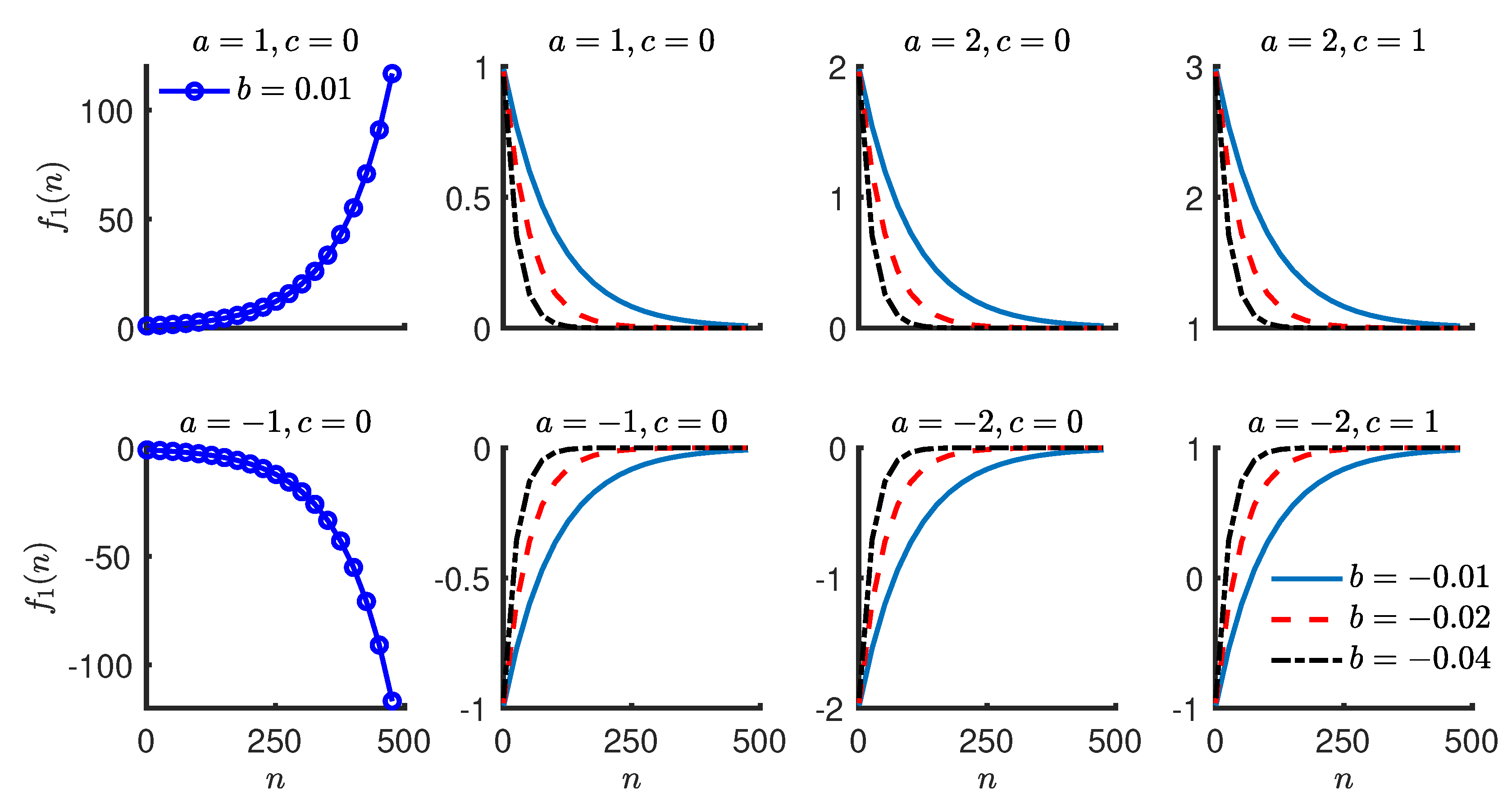
2.2.1. Single Exponential Model
Common Language Interpretation
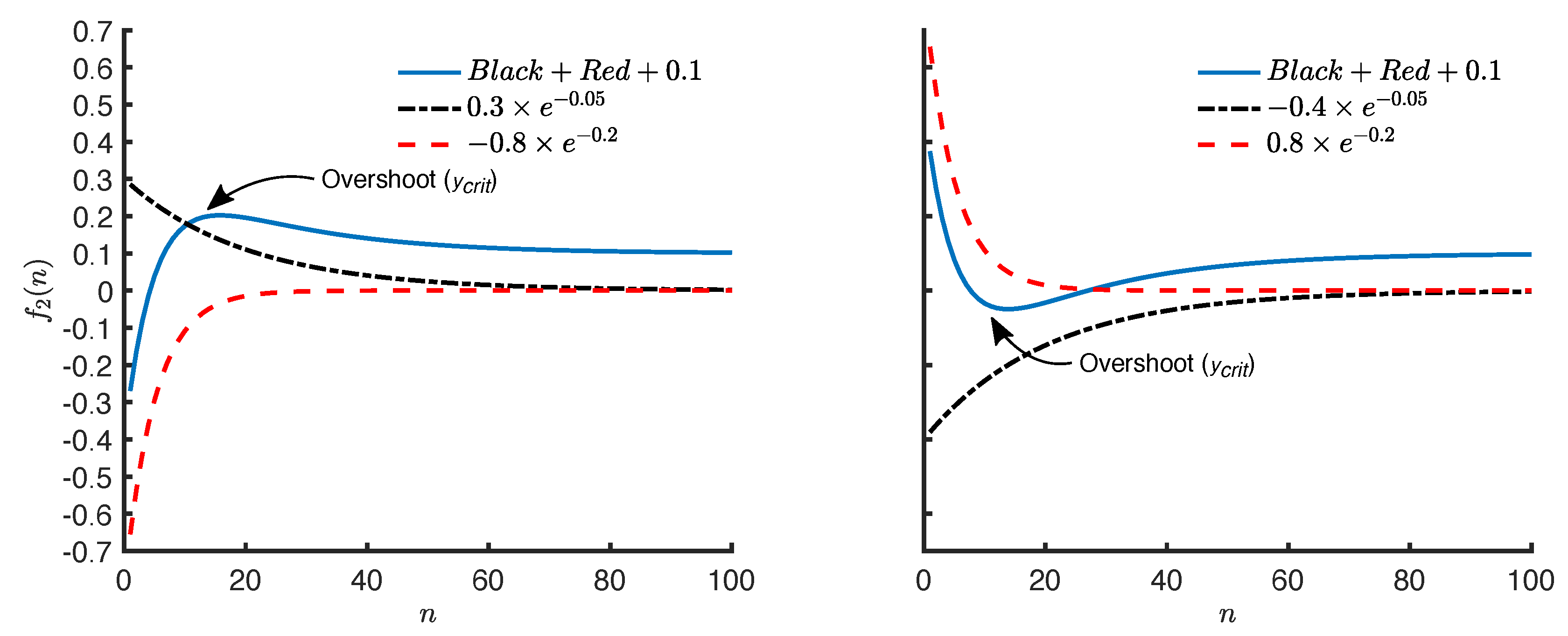
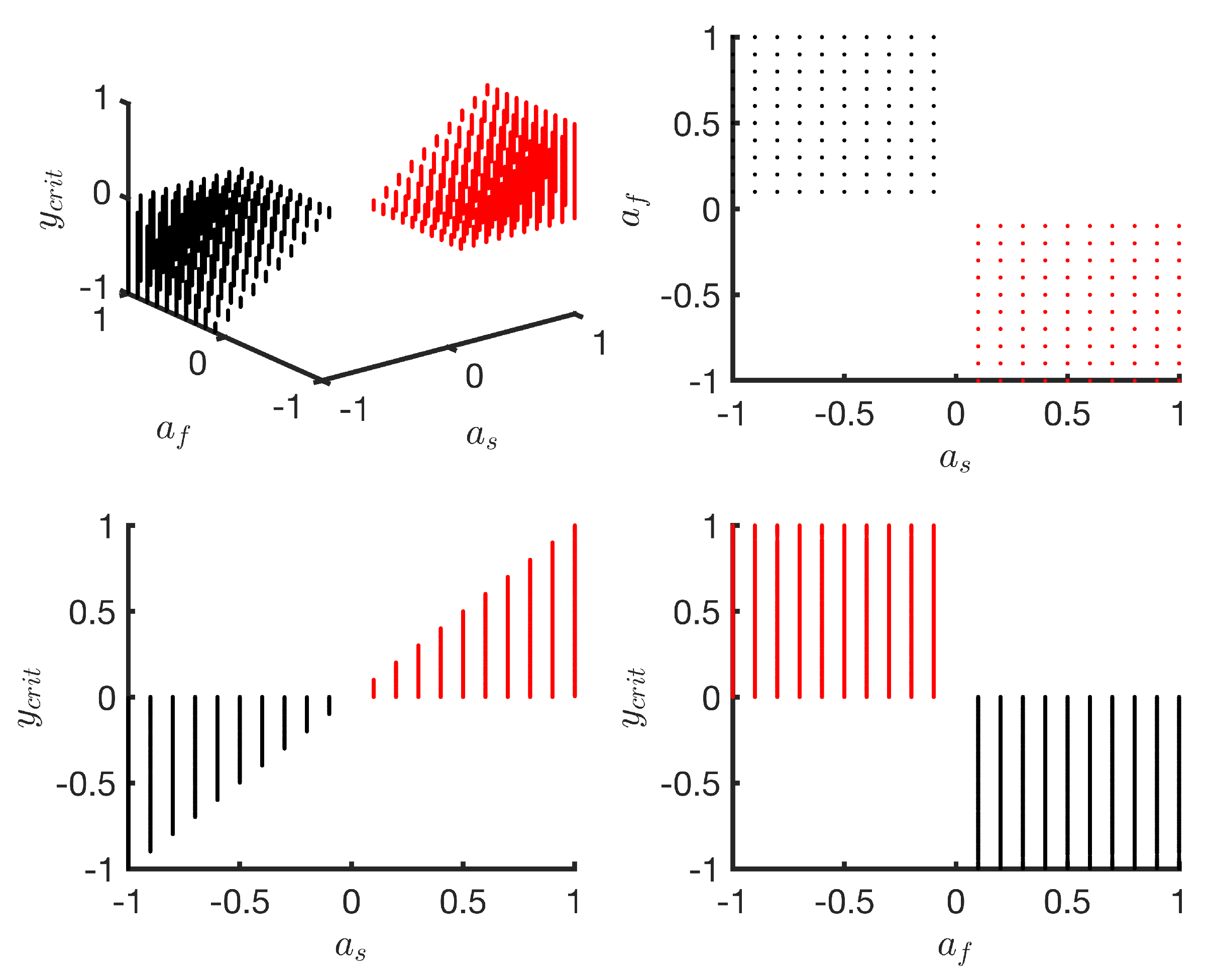
2.2.2. Double Exponential Model
Common Language Interpretation
2.3. Model Fitting
2.3.1. Parameter Bounds
Bounds for c
Bounds for b, ,
Bounds for a, ,
2.3.2. Optimisation Problems
2.3.3. Optimisation Algorithm
2.4. Model Evaluation and Selection
2.5. Confidence Intervals for Parameters
2.5.1. Based on Linearisation
2.5.2. Without Linearisation
2.6. MATLAB Implementation of Methods
3. Results
3.1. Group-Averaged Symmetry Series
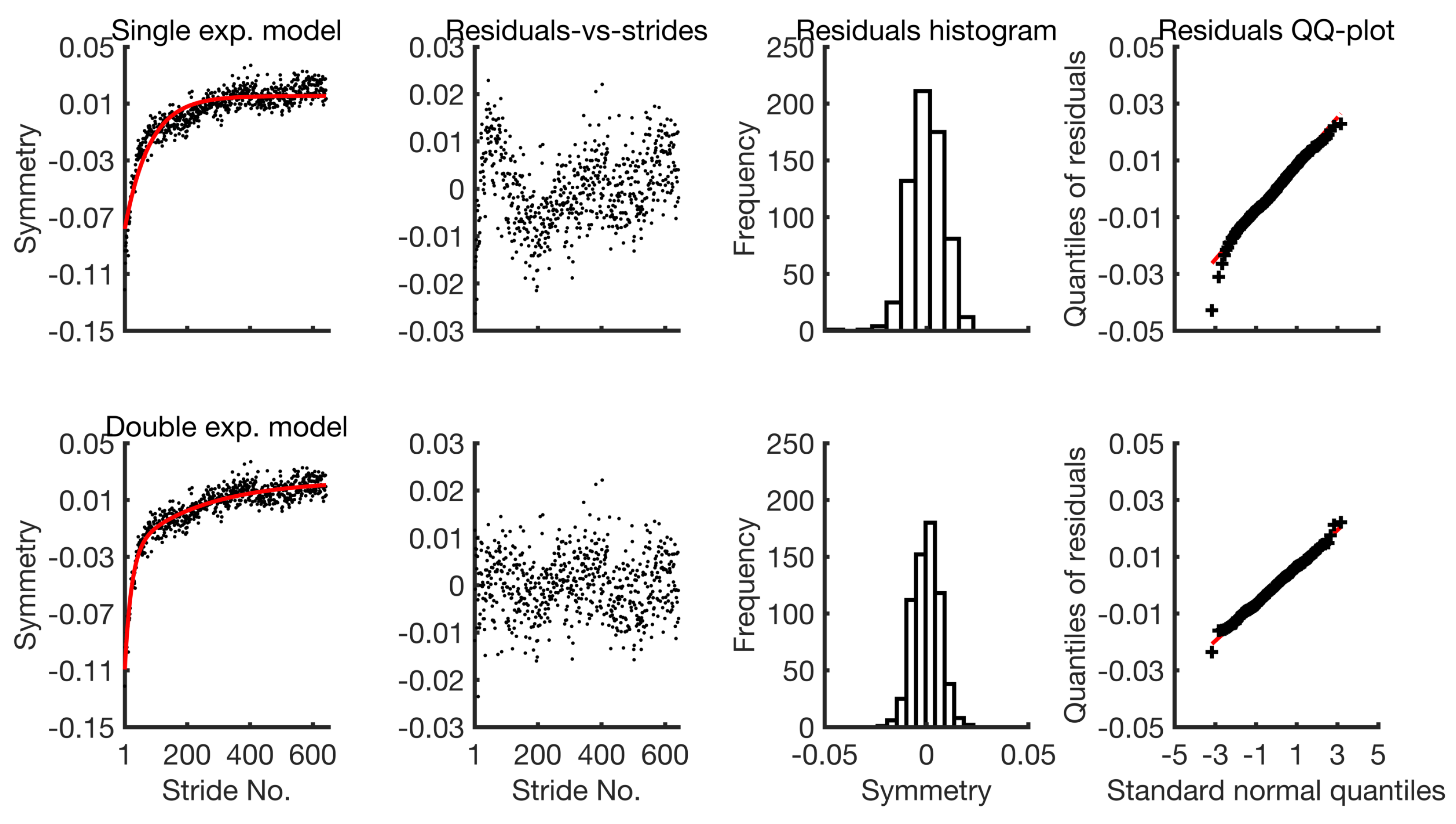
3.1.1. Model Selection
3.1.2. Estimated Parameters and Confidence Intervals
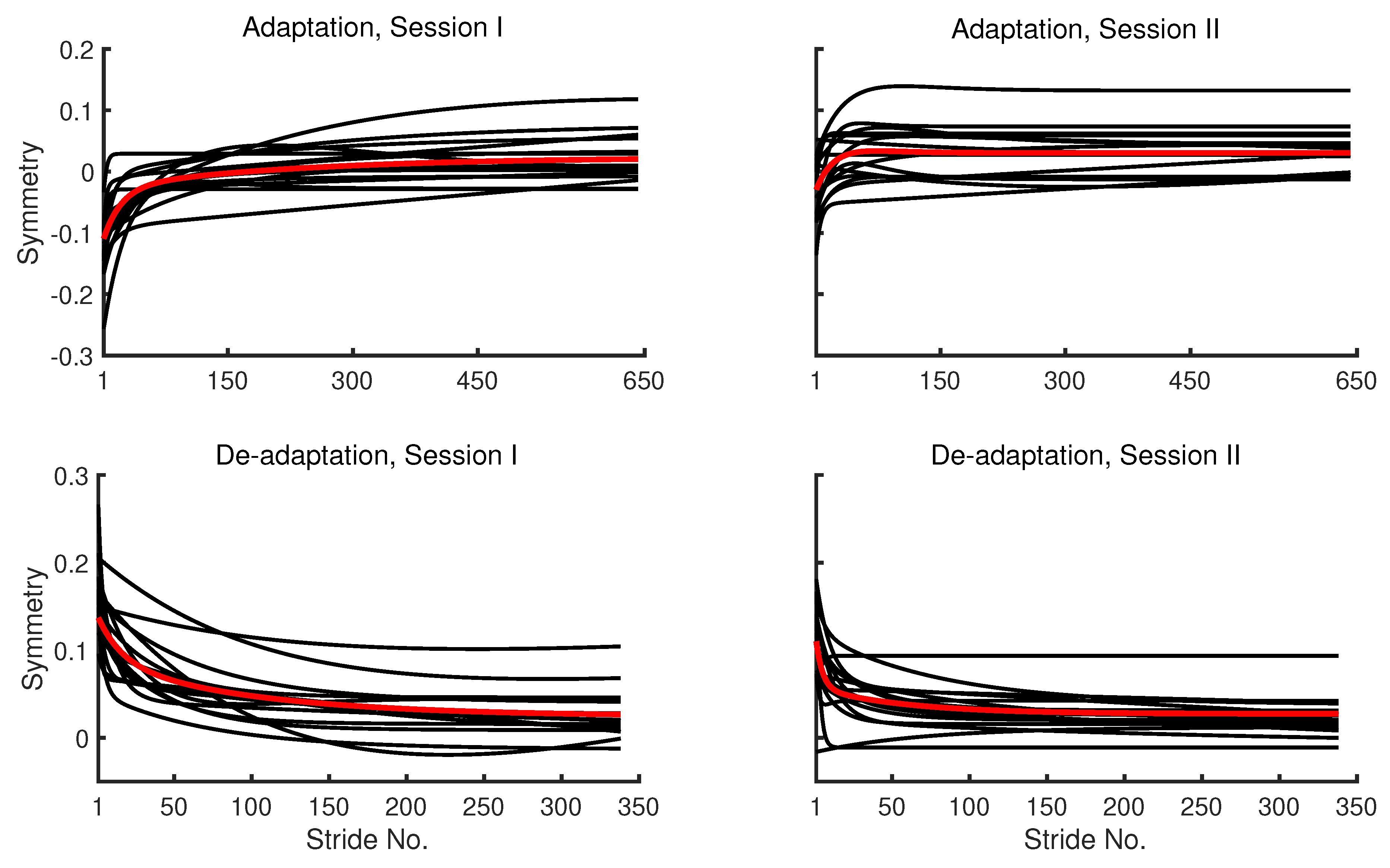
3.2. Participant Symmetry Series
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AIC | Akaike’s information criterion |
| PSO | Particle swarm optimisation |
| SS | Same speed configuration |
| DS | Differential speed configuration |
| ctDCS | Cerebellar transcranial direct current stimulation |
| AUTEC | Auckland University of Technology Ethics Committee |
| CIs | Confidence intervals |
| UD | Undefined |
References
- Helm, E.E.; Reisman, D.S. The Split-Belt Walking Paradigm. Phys. Med. Rehabil. Clin. 2015, 26, 703–713. [Google Scholar] [CrossRef] [Green Version]
- Yokoyama, H.; Sato, K.; Ogawa, T.; Yamamoto, S.I.; Nakazawa, K.; Kawashima, N. Characteristics of the gait adaptation process due to split-belt treadmill walking under a wide range of right-left speed ratios in humans. PLoS ONE 2018, 13, e0194875. [Google Scholar] [CrossRef]
- Buurke, T.J.W.; Lamoth, C.J.C.; Vervoort, D.; van der Woude, L.H.V.; den Otter, R. Adaptive control of dynamic balance in human gait on a split-belt treadmill. J. Exp. Biol. 2018, 221, jeb174896. [Google Scholar] [CrossRef] [Green Version]
- Hoogkamer, W. Perception of Gait Asymmetry During Split-Belt Walking. Exerc. Sport Sci. Rev. 2017, 45, 34–40. [Google Scholar] [CrossRef]
- Vazquez, A.; Statton, M.A.; Busgang, S.A.; Bastian, A.J. Split-belt walking adaptation recalibrates sensorimotor estimates of leg speed but not position or force. J. Neurophysiol. 2015, 114, 3255–3267. [Google Scholar] [CrossRef]
- Fujiki, S.; Aoi, S.; Funato, T.; Tomita, N.; Senda, K.; Tsuchiya, K. Adaptation mechanism of interlimb coordination in human split-belt treadmill walking through learning of foot contact timing: A robotics study. J. R. Soc. Interface 2015, 12, 20150542. [Google Scholar] [CrossRef] [Green Version]
- Frigon, A.; Thibaudier, Y.; Hurteau, M.F. Modulation of forelimb and hindlimb muscle activity during quadrupedal tied-belt and split-belt locomotion in intact cats. Neuroscience 2015, 290, 266–278. [Google Scholar] [CrossRef]
- Sloot, L.H.; van der Krogt, M.M.; Harlaar, J. Self-paced versus fixed speed treadmill walking. Gait Posture 2014, 39, 478–484. [Google Scholar] [CrossRef] [Green Version]
- Roper, J.A.; Roemmich, R.T.; Tillman, M.D.; Terza, M.J.; Hass, C.J. Split-Belt Treadmill Walking Alters Lower Extremity Frontal Plane Mechanics. Eur. J. Appl. Physiol. 2017, 33, 256–260. [Google Scholar] [CrossRef]
- Frigon, A.; Hurteau, M.F.; Thibaudier, Y.; Leblond, H.; Telonio, A.; D’Angelo, G. Split-Belt Walking Alters the Relationship between Locomotor Phases and Cycle Duration across Speeds in Intact and Chronic Spinalized Adult Cats. J. Neurosci. 2013, 33, 8559–8566. [Google Scholar] [CrossRef] [Green Version]
- Ogawa, T.; Kawashima, N.; Ogata, T.; Nakazawa, K. Predictive control of ankle stiffness at heel contact is a key element of locomotor adaptation during split-belt treadmill walking in humans. J. Neurophysiol. 2014, 111, 722–732. [Google Scholar] [CrossRef] [Green Version]
- Buurke, T.J.W.; Lamoth, C.J.C.; van der Woude, L.H.V.; Hof, A.L.; den Otter, R. Bilateral temporal control determines mediolateral margins of stability in symmetric and asymmetric human walking. Sci. Rep. 2019, 9, 12494. [Google Scholar] [CrossRef] [Green Version]
- Lauzière, S.; Miéville, C.; Duclos, C.; Aissaoui, R.; Nadeau, S. Perception Threshold of Locomotor Symmetry While Walking on a Split-Belt Treadmill in Healthy Elderly Individuals. Percept. Mot. Ski. 2014, 118, 475–490. [Google Scholar] [CrossRef] [Green Version]
- Nanhoe-Mahabier, W.; Snijders, A.H.; Delval, A.; Weerdesteyn, V.; Duysens, J.; Overeem, S.; Bloem, B.R. Split-belt locomotion in Parkinson’s disease with and without freezing of gait. Neuroscience 2013, 236, 110–116. [Google Scholar] [CrossRef]
- Kautz, S.A.; Bowden, M.G.; Clark, D.J.; Neptune, R.R. Comparison of Motor Control Deficits During Treadmill and Overground Walking Poststroke. Neurorehabilit. Neural Repair 2011, 25, 756–765. [Google Scholar] [CrossRef] [Green Version]
- Zeni Jr, J.A.; Higginson, J.S. Gait parameters and stride-to-stride variability during familiarization to walking on a split-belt treadmill. Clin. Biomech. 2010, 25, 383–386. [Google Scholar] [CrossRef] [Green Version]
- Reisman, D.S.; Bastian, A.J.; Morton, S.M. Neurophysiologic and rehabilitation insights from the split-belt and other locomotor adaptation paradigms. Phys. Ther. 2010, 90, 187–195. [Google Scholar] [CrossRef] [Green Version]
- Reisman, D.S.; Wityk, R.; Silver, K.; Bastian, A.J. Locomotor adaptation on a split-belt treadmill can improve walking symmetry post-stroke. Brain 2007, 130, 1861–1872. [Google Scholar] [CrossRef] [Green Version]
- Thelen, E.; Ulrich, B.D.; Niles, D. Bilateral coordination in human infants: Stepping on a split-belt treadmill. J. Exp. Psychol. Hum. Percept. Perform. 1987, 13, 405. [Google Scholar] [CrossRef]
- Seuthe, J.; D’Cruz, N.; Ginis, P.; Weisser, B.; Berg, D.; Deuschl, G.; Nieuwboer, A.; Schlenstedt, C. Split-belt treadmill walking in patients with Parkinson’s disease: A systematic review. Gait Posture 2019, 69, 187–194. [Google Scholar] [CrossRef]
- Betschart, M.; McFadyen, B.J.; Nadeau, S. Repeated split-belt treadmill walking improved gait ability in individuals with chronic stroke: A pilot study. Physiother. Theory Pract. 2018, 34, 81–90. [Google Scholar] [CrossRef]
- Feasel, J.; Whitton, M.C.; Kassler, L.; Brooks, F.P.; Lewek, M.D. The Integrated Virtual Environment Rehabilitation Treadmill System. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 290–297. [Google Scholar] [CrossRef] [Green Version]
- Moon, Y.; McGinnis, R.S.; Seagers, K.; Motl, R.W.; Sheth, N.; Wright, J.A., Jr.; Ghaffari, R.; Sosnoff, J.J. Monitoring gait in multiple sclerosis with novel wearable motion sensors. PLoS ONE 2017, 12, e0171346. [Google Scholar] [CrossRef]
- Smith, L.; Preece, S.; Mason, D.; Bramah, C. A comparison of kinematic algorithms to estimate gait events during overground running. Gait Posture 2015, 41, 39–43. [Google Scholar] [CrossRef] [Green Version]
- de-la Herran, A.M.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait Analysis Methods: An Overview of Wearable and Non-Wearable Systems, Highlighting Clinical Applications. Sensors 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [Green Version]
- Formento, P.C.; Acevedo, R.; Ghoussayni, S.; Ewins, D. Gait event detection during stair walking using a rate gyroscope. Sensors 2014, 14, 5470–5485. [Google Scholar] [CrossRef] [Green Version]
- Jayaram, G.; Tang, B.; Pallegadda, R.; Vasudevan, E.V.L.; Celnik, P.; Bastian, A. Modulating locomotor adaptation with cerebellar stimulation. J. Neurophysiol. 2012, 107, 2950–2957. [Google Scholar] [CrossRef] [Green Version]
- Fellin, R.E.; Rose, W.C.; Royer, T.D.; Davis, I.S. Comparison of methods for kinematic identification of footstrike and toe-off during overground and treadmill running. J. Sci. Med. Sport 2010, 13, 646–650. [Google Scholar] [CrossRef] [Green Version]
- Jasiewicz, J.M.; Allum, J.H.; Middleton, J.W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R.C.T. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture 2006, 24, 502–509. [Google Scholar] [CrossRef] [Green Version]
- Reisman, D.S.; Block, H.J.; Bastian, A.J. Interlimb Coordination During Locomotion: What Can be Adapted and Stored? J. Neurophysiol. 2005, 94, 2403–2415. [Google Scholar] [CrossRef] [Green Version]
- Martin, T.A.; Keating, J.G.; Goodkin, H.P.; Bastian, A.J.; Thach, W.T. Throwing while looking through prisms: II. Specificity and storage of multiple gaze–throw calibrations. Brain 1996, 119, 1199–1211. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, M.; Eikema, D.J.A.; Chien, J.H.; Myers, S.A.; Scott-Pandorf, M.; Bloomberg, J.J.; Stergiou, N. Plantar tactile perturbations enhance transfer of split-belt locomotor adaptation. Exp. Brain Res. 2015, 233, 3005–3012. [Google Scholar] [CrossRef] [Green Version]
- Musselman, K.E.; Patrick, S.K.; Vasudevan, E.V.L.; Bastian, A.J.; Yang, J.F. Unique characteristics of motor adaptation during walking in young children. J. Neurophysiol. 2011, 105, 2195–2203. [Google Scholar] [CrossRef] [Green Version]
- Mawase, F.; Haizler, T.; Bar-Haim, S.; Karniel, A. Kinetic adaptation during locomotion on a split-belt treadmill. J. Neurophysiol. 2013, 109, 2216–2227. [Google Scholar] [CrossRef] [Green Version]
- Heathcote, A.; Brown, S.; Mewhort, D.J.K. The power law repealed: The case for an exponential law of practice. Psychon. Bull. Rev. 2000, 7, 185–207. [Google Scholar] [CrossRef] [Green Version]
- Tang, R.; Kim, J.; Gaebler-Spira, D.J.; Wu, M. Gradual increase of perturbation load induces a longer retention of locomotor adaptation in children with cerebral palsy. Hum. Mov. Sci. 2019, 63, 20–33. [Google Scholar] [CrossRef]
- Sombric, C.J.; Calvert, J.S.; Torres-Oviedo, G. Large Propulsion Demands Increase Locomotor Adaptation at the Expense of Step Length Symmetry. Front. Physiol. 2019, 10. [Google Scholar] [CrossRef] [Green Version]
- Cajigas, I.; Koenig, A.; Severini, G.; Smith, M.; Bonato, P. Robot-induced perturbations of human walking reveal a selective generation of motor adaptation. Sci. Robot. 2017, 2, eaam7749. [Google Scholar] [CrossRef]
- Mawase, F.; Bar-Haim, S.; Joubran, K.; Rubin, L.; Karniel, A.; Shmuelof, L. Increased Adaptation Rates and Reduction in Trial-by-Trial Variability in Subjects with Cerebral Palsy Following a Multi-session Locomotor Adaptation Training. Front. Hum. Neurosci. 2016, 10, 203. [Google Scholar] [CrossRef] [Green Version]
- Mawase, F.; Shmuelof, L.; Bar-Haim, S.; Karniel, A. Savings in locomotor adaptation explained by changes in learning parameters following initial adaptation. J. Neurophysiol. 2014, 111, 1444–1454. [Google Scholar] [CrossRef]
- Savin, D.N.; Morton, S.M.; Whitall, J. Generalization of improved step length symmetry from treadmill to overground walking in persons with stroke and hemiparesis. Clin. Neurophysiol. 2014, 125, 1012–1020. [Google Scholar] [CrossRef] [Green Version]
- Savin, D.N.; Tseng, S.C.; Whitall, J.; Morton, S.M. Poststroke hemiparesis impairs the rate but not magnitude of adaptation of spatial and temporal locomotor features. Neurorehabilit. Neural Repair 2013, 27, 24–34. [Google Scholar] [CrossRef] [Green Version]
- Blanchette, A.; Moffet, H.; Roy, J.S.; Bouyer, L.J. Effects of repeated walking in a perturbing environment: A 4-day locomotor learning study. J. Neurophysiol. 2012, 108, 275–284. [Google Scholar] [CrossRef] [Green Version]
- Vasudevan, E.V.L.; Torres-Oviedo, G.; Morton, S.M.; Yang, J.F.; Bastian, A.J. Younger Is Not Always Better: Development of Locomotor Adaptation from Childhood to Adulthood. J. Neurosci. 2011, 31, 3055–3065. [Google Scholar] [CrossRef] [Green Version]
- Malone, L.A.; Vasudevan, E.V.L.; Bastian, A.J. Motor Adaptation Training for Faster Relearning. J. Neurosci. 2011, 31, 15136–15143. [Google Scholar] [CrossRef]
- Lang, C.E.; Bastian, A.J. Cerebellar Subjects Show Impaired Adaptation of Anticipatory EMG During Catching. J. Neurophysiol. 1999, 82, 2108–2119. [Google Scholar] [CrossRef]
- Walker, E.R.; Hyngstrom, A.S.; Onushko, T.; Schmit, B.D. Locomotor adaptations to prolonged step-by-step frontal plane trunk perturbations in young adults. PLoS ONE 2018, 13, e0203776. [Google Scholar] [CrossRef]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv 2016, arXiv:1609.04747. [Google Scholar]
- Gavin, H. The Levenberg-Marquardt method for nonlinear least squares curve-fitting problems. Dep. Civ. Environ. Eng. Duke Univ. 2011, 28, 1–5. [Google Scholar]
- CoStat. CoStat Statistical Software. 1986. Available online: https://www.cohort.com/costat.html (accessed on 7 December 2018).
- Software, S. SigmaPlot for Windows; Version 11.0; Systat Software, Inc.: San Jose, CA, USA, 2018. [Google Scholar]
- Spiess, A.N.; Neumeyer, N. An evaluation of R2 as an inadequate measure for nonlinear models in pharmacological and biochemical research: A Monte Carlo approach. BMC Pharmacol. 2010, 10, 6. [Google Scholar] [CrossRef] [Green Version]
- Vugrin, K.W.; Swiler, L.P.; Roberts, R.M.; Stucky-Mack, N.J.; Sullivan, S.P. Confidence region estimation techniques for nonlinear regression in groundwater flow: Three case studies. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Bates, D.M.; Watts, D.G. (Eds.) Nonlinear Regression Analysis and Its Applications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1988. [Google Scholar] [CrossRef] [Green Version]
- Demidenko, E. Advanced Statistics with Applications in R; John Wiley & Sons: Hoboken, NJ, USA, 2019; Volume 392. [Google Scholar]
- Furlan, C.; Mortarino, C. Comparison among simultaneous confidence regions for nonlinear diffusion models. Comput. Stat. 2020, 35, 1951–1991. [Google Scholar] [CrossRef]
- Demidenko, E. Exact and approximate statistical inference for nonlinear regression and the estimating equation approach. Scand. J. Stat. 2017, 44, 636–665. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth International Symposium on Micro Machine and Human Science, MHS’95, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Beier, P.; Burnham, K.P.; Anderson, D.R. Model Selection and Inference: A Practical Information-Theoretic Approach; Springer: New York, NY, USA, 2001. [Google Scholar] [CrossRef]
- Ruckstuhl, A. Introduction to nonlinear regression. In IDP Institut fur Datenanalyse und Prozessdesign, Zurcher Hochschule fur Angewandte Wissenschaften; Zurich University of Applied Sciences: Winterthur, Switzerland, 2010. [Google Scholar]
- Kumari, N.; Taylor, D.; Rashid, U.; Vandal, A.C.; Smith, P.F.; Signal, N. Cerebellar transcranial direct current stimulation for learning a novel split-belt treadmill task: A randomised controlled trial. Sci. Rep. 2020, 10, 11853. [Google Scholar] [CrossRef]
- Rashid, U.; Kumari, N.; Taylor, D.; David, T.; Signal, N. Gait Event Anomaly Detection and Correction During a Split-Belt Treadmill Task. IEEE Access 2019, 7, 68469–68478. [Google Scholar] [CrossRef]
- Bryan, K.; Shibberu, Y. Penalty functions and constrained optimization. Dept. Math. Rose Hulman Inst. Technol. 2005. Available online: https://www.rose-hulman.edu/~bryan/lottamath/penalty.pdf (accessed on 14 October 2020).
- Tingleff, O.; Madsen, K.; Nielsen, H. Methods for Non-Linear Least Squares Problems; Lecture Note in Computer Science 02611 Optimization and Data Fitting; 2004; Available online: https://orbit.dtu.dk/en/publications/methods-for-non-linear-least-squares-problems-2nd-ed (accessed on 14 October 2020).
- Marini, F.; Walczak, B. Particle swarm optimization (PSO). A tutorial. Chemom. Intell. Lab. Syst. 2015, 149, 153–165. [Google Scholar] [CrossRef]
- Adibifard, M.; Bashiri, G.; Roayaei, E.; Emad, M.A. Using Particle Swarm Optimization (PSO) Algorithm in Nonlinear Regression Well Test Analysis and Its Comparison with Levenberg-Marquardt Algorithm. Int. J. Appl. Metaheuristic Comput. (IJAMC) 2016, 7, 1–23. [Google Scholar] [CrossRef]
- Erdoğmuş, P.; Ekiz, S. Nonlinear Regression using Particle Swarm Optimization and Genetic Algorithm. Int. J. Comput. Appl. 2016, 153, 28–36. [Google Scholar] [CrossRef]
- Lu, N.; Zhou, J.; He, Y.; Liu, Y. Particle Swarm Optimization for Parameter Optimization of Support Vector Machine Model. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, ICICTA’09, Changsha, China, 10–11 October 2009; Volume 1, pp. 283–286. [Google Scholar] [CrossRef]
- Rashid, U.; Niazi, I.K.; Jochumsen, M.; Krol, L.R.; Signal, N.; Taylor, D. Automated Labeling of Movement- Related Cortical Potentials Using Segmented Regression. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1282–1291. [Google Scholar] [CrossRef]
- Rashid, U.; Niazi, I.K.; Signal, N.; Farina, D.; Taylor, D. Optimal automatic detection of muscle activation intervals. J. Electromyogr. Kinesiol. 2019, 48, 103–111. [Google Scholar] [CrossRef]
- Byrd, R.H.; Gilbert, J.C.; Nocedal, J. A trust region method based on interior point techniques for nonlinear programming. Math. Program. 2000, 89, 149–185. [Google Scholar] [CrossRef] [Green Version]
- Straume, M.; Johnson, M.L. [5] Analysis of Residuals: Criteria for determining goodness-of-fit. In Methods in Enzymology; Elsevier: Amsterdam, The Netherlands, 1992; Volume 210, pp. 87–105. [Google Scholar] [CrossRef]
- Wisniak, J.; Polishuk, A. Analysis of residuals—A useful tool for phase equilibrium data analysis. Fluid Phase Equilibria 1999, 164, 61–82. [Google Scholar] [CrossRef]
- Cumming, G. Inference by eye: Reading the overlap of independent confidence intervals. Stat. Med. 2009, 28, 205–220. [Google Scholar] [CrossRef]
- Benšić, M. Confidence regions and intervals in nonlinear regression. Math. Commun. 1997, 2, 71–76. [Google Scholar]
- MathWorks. Statistics and Machine Learning Toolbox User’s Guide (r2018b). 2018. Available online: https://www.mathworks.com/help/stats/nlparci.html (accessed on 7 December 2018).
- Forsythe, G.; Malcolm, M.; Moler, C. Computer Methods for Mathematical Computations; Prentice Hall: Englewood Cliffs, NJ, USA, 1977. [Google Scholar]
- Pinheiro, J.; Bates, D.; DebRoy, S.; Sarkar, D.; Team, R.C. nlme: Linear and nonlinear mixed effects models. R Package Version 2012, 3, 111. [Google Scholar]
- Vliet, R.; Selles, R.W.; Andrinopoulou, E.; Nijland, R.; Ribbers, G.M.; Frens, M.A.; Meskers, C.; Kwakkel, G. Predicting Upper Limb Motor Impairment Recovery after Stroke: A Mixture Model. Ann. Neurol. 2020, 87, 383–393. [Google Scholar] [CrossRef] [Green Version]
- Day, K.A.; Leech, K.A.; Roemmich, R.T.; Bastian, A.J. Accelerating locomotor savings in learning: Compressing four training days to one. J. Neurophysiol. 2018, 119, 2100–2113. [Google Scholar] [CrossRef] [Green Version]
- Buurke, T.J.W.; Lamoth, C.J.C.; van der Woude, L.H.V.; den Otter, R. Handrail Holding During Treadmill Walking Reduces Locomotor Learning in Able-Bodied Persons. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1753–1759. [Google Scholar] [CrossRef]
- Finley, J.M.; Statton, M.A.; Bastian, A.J. A novel optic flow pattern speeds split-belt locomotor adaptation. J. Neurophysiol. 2014, 111, 969–976. [Google Scholar] [CrossRef] [Green Version]
- Tyrell, C.M.; Helm, E.; Reisman, D.S. Learning the spatial features of a locomotor task is slowed after stroke. J. Neurophysiol. 2014, 112, 480–489. [Google Scholar] [CrossRef]
- Benson, B.L.; Anguera, J.A.; Seidler, R.D. A spatial explicit strategy reduces error but interferes with sensorimotor adaptation. J. Neurophysiol. 2011, 105, 2843–2851. [Google Scholar] [CrossRef] [Green Version]
- Earhart, G.M.; Jones, G.M.; Horak, F.B.; Block, E.W.; Weber, K.D.; Fletcher, W.A. Podokinetic After-Rotation Following Unilateral and Bilateral Podokinetic Stimulation. J. Neurophysiol. 2002, 87, 1138–1141. [Google Scholar] [CrossRef] [Green Version]
- Yavari, F.; Mahdavi, S.; Towhidkhah, F.; Ahmadi-Pajouh, M.A.; Ekhtiari, H.; Darainy, M. Cerebellum as a forward but not inverse model in visuomotor adaptation task: A tDCS-based and modeling study. Exp. Brain Res. 2016, 234, 997–1012. [Google Scholar] [CrossRef]
- Dominici, N.; Ivanenko, Y.P.; Lacquaniti, F. Control of Foot Trajectory in Walking Toddlers: Adaptation to Load Changes. J. Neurophysiol. 2007, 97, 2790–2801. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model (Parameters) | Direction | Overshoot | Bounds |
|---|---|---|---|
| Single (a; b; c) | +ve | – | [0, 2]; [−ln(2), 0]; [−1, 1] |
| −ve | – | [−2, 0]; [(2), 0]; [−1, 1] | |
| Double (; ; ; ; c) | +ve | No | [0, 1]; [−ln(2), 0]; [0, 1]; [−ln(2), 0]; [−1, 1] |
| Yes | [−1, 0]; [−ln(2), 0]; [0, 1]; [−ln(2), 0]; [−1, 1] | ||
| −ve | No | [−1, 0]; [−ln(2), 0]; [−1, 0]; [−ln(2), 0]; [−1, 1] | |
| Yes | [0, 1]; [−ln(2), 0]; [−1, 0]; [−ln(2), 0]; [−1, 1] |
| Phase | Session | AIC (Single Exp. Model) | AIC (Double Exp. Model) |
|---|---|---|---|
| Adaptation | I | −2017.63 | −2327.59 |
| II | −2472.15 | −2496.23 | |
| De-adaptation | I | −1326.61 | −1371.21 |
| II | −1409.85 | −1461.28 |
| Phase | Parameter | Session | CI Overlap | |
|---|---|---|---|---|
| Session I | Session II | |||
| Adapt | Asymmetry at beginning | −0.114 [−0.126, −0.106] | −0.033 [−1.018, 0.888] | Yes |
| Total change | −0.137 [−0.148, −0.133] | −0.063 [−1.048, 0.857] | Yes | |
| Strides to 50% changes | 235 [194, 299]; 21 [18, 24] | 30 [25, 52]; 28 [19, 32] | No *, Yes | |
| Asymmetry at end | 0.024 [0.021, 0.027] | 0.030 [0.030, 0.031] | No * | |
| Overshoot | UD [UD, UD] | 0.034 [0.030, UD] | Yes | |
| Residuals std. | 6.386 × 10−3 | 5.600 × 10−3 | – | |
| De-adapt | Asymmetry at beginning | 0.141 [−0.863, 0.227] | 0.125 [0.090, 0.154] | Yes |
| Total change | 0.117 [0.080, 0.200] | 0.098 [0.070, 0.125] | Yes | |
| Strides to 50% changes | 100 [76, 13203]; 15 [8, 34] | 58 [38, 252]; 4 [2, 11] | Yes, Yes | |
| Asymmetry at end | 0.024 [−0.943, 0.027] | 0.027 [0.019, 0.029] | Yes | |
| Overshoot | UD [UD, UD] | UD [UD, UD] | Yes | |
| Residuals std. | 7.043 × 10−3 | 6.161 × 10−3 | – | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rashid, U.; Kumari, N.; Signal, N.; Taylor, D.; Vandal, A.C. On Nonlinear Regression for Trends in Split-Belt Treadmill Training. Brain Sci. 2020, 10, 737. https://doi.org/10.3390/brainsci10100737
Rashid U, Kumari N, Signal N, Taylor D, Vandal AC. On Nonlinear Regression for Trends in Split-Belt Treadmill Training. Brain Sciences. 2020; 10(10):737. https://doi.org/10.3390/brainsci10100737
Chicago/Turabian StyleRashid, Usman, Nitika Kumari, Nada Signal, Denise Taylor, and Alain C. Vandal. 2020. "On Nonlinear Regression for Trends in Split-Belt Treadmill Training" Brain Sciences 10, no. 10: 737. https://doi.org/10.3390/brainsci10100737
APA StyleRashid, U., Kumari, N., Signal, N., Taylor, D., & Vandal, A. C. (2020). On Nonlinear Regression for Trends in Split-Belt Treadmill Training. Brain Sciences, 10(10), 737. https://doi.org/10.3390/brainsci10100737