A Hybrid Method for Remaining Useful Life Estimation of Lithium-Ion Battery with Regeneration Phenomena

Abstract
:1. Introduction
2. Basic Theories
2.1. Relevance Vector Machine
2.2. Gray Forecasting Theory
3. Model Development
3.1. Lithium-Ion Battery RUL Prognostics
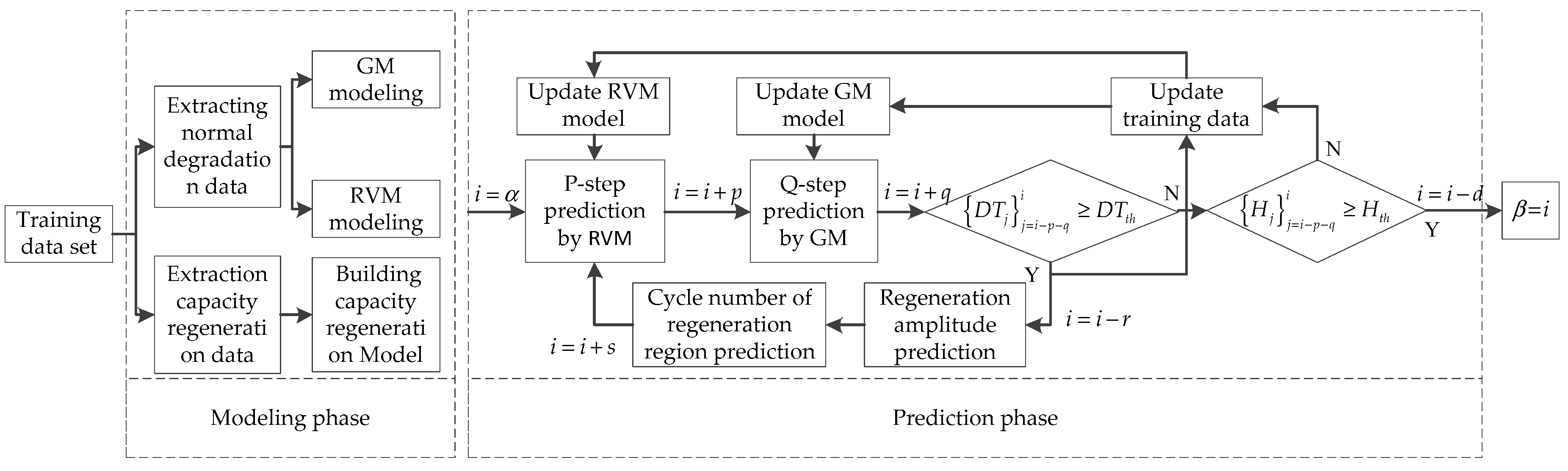
3.2. Hybrid RVM-GM Prediction Method
| Algorithm 1 |
| ● Input: train dataset and , RVM model, regeneration amplitude dataset , regeneration number dataset , SOH threshold 1. while 2. if and 3. set 4. end 5. if the cycle regeneration and 6. set 7. set 8. for 9. set 10. set 11. end 12. set 13. Remove to from dataset 14. else 15. for 16. set as the input of the RVM model 17. predict by RVM model 18. put into the dataset 19. set 20. end 21. predict to by GRAY model 22. put to in to set 23. set 24. set new dataset 25. retrain the RVM model by new 26. set 27. end 28. end ● output: end life cycle number , SOH prediction results |
4. Results and Discussion
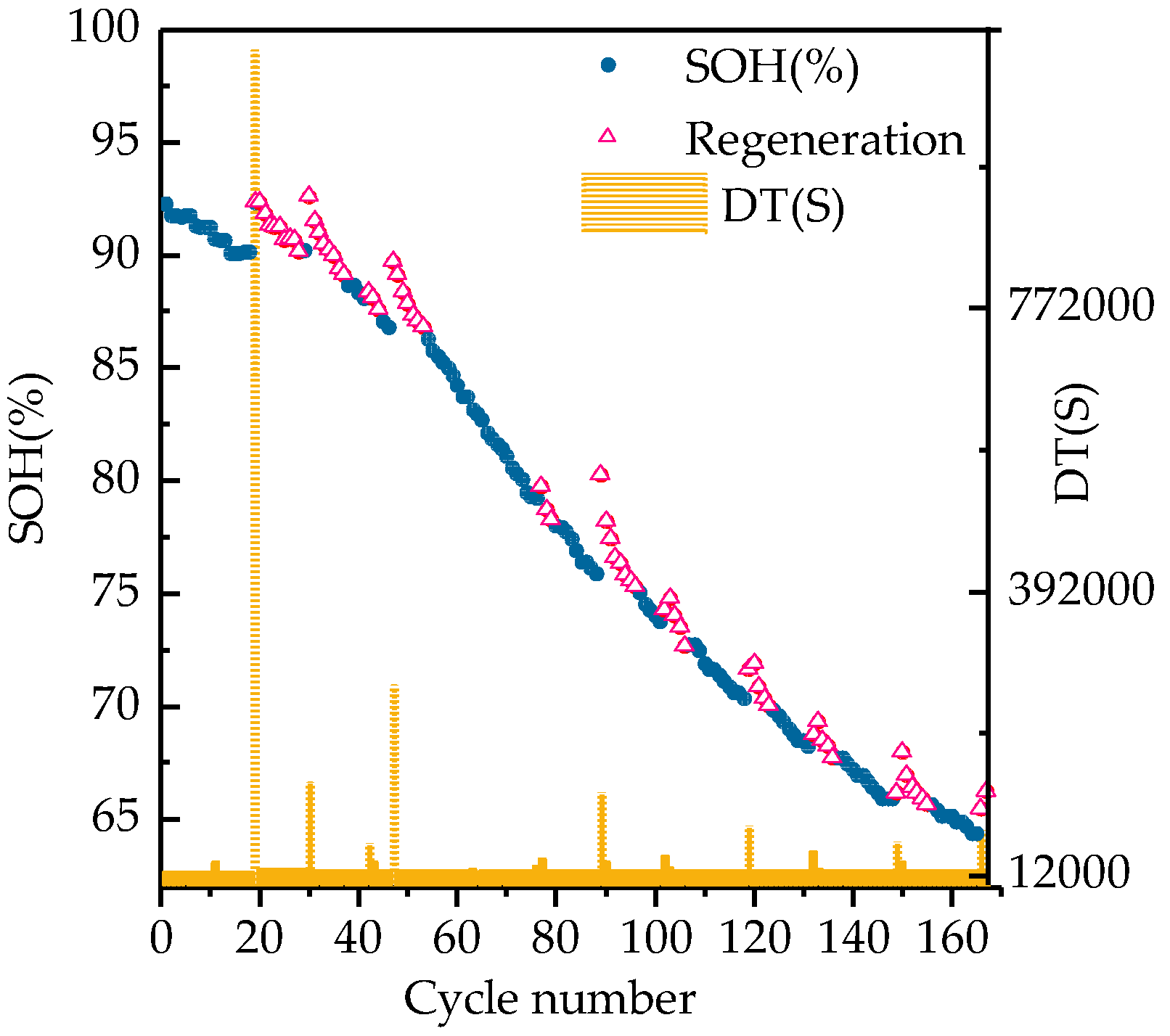
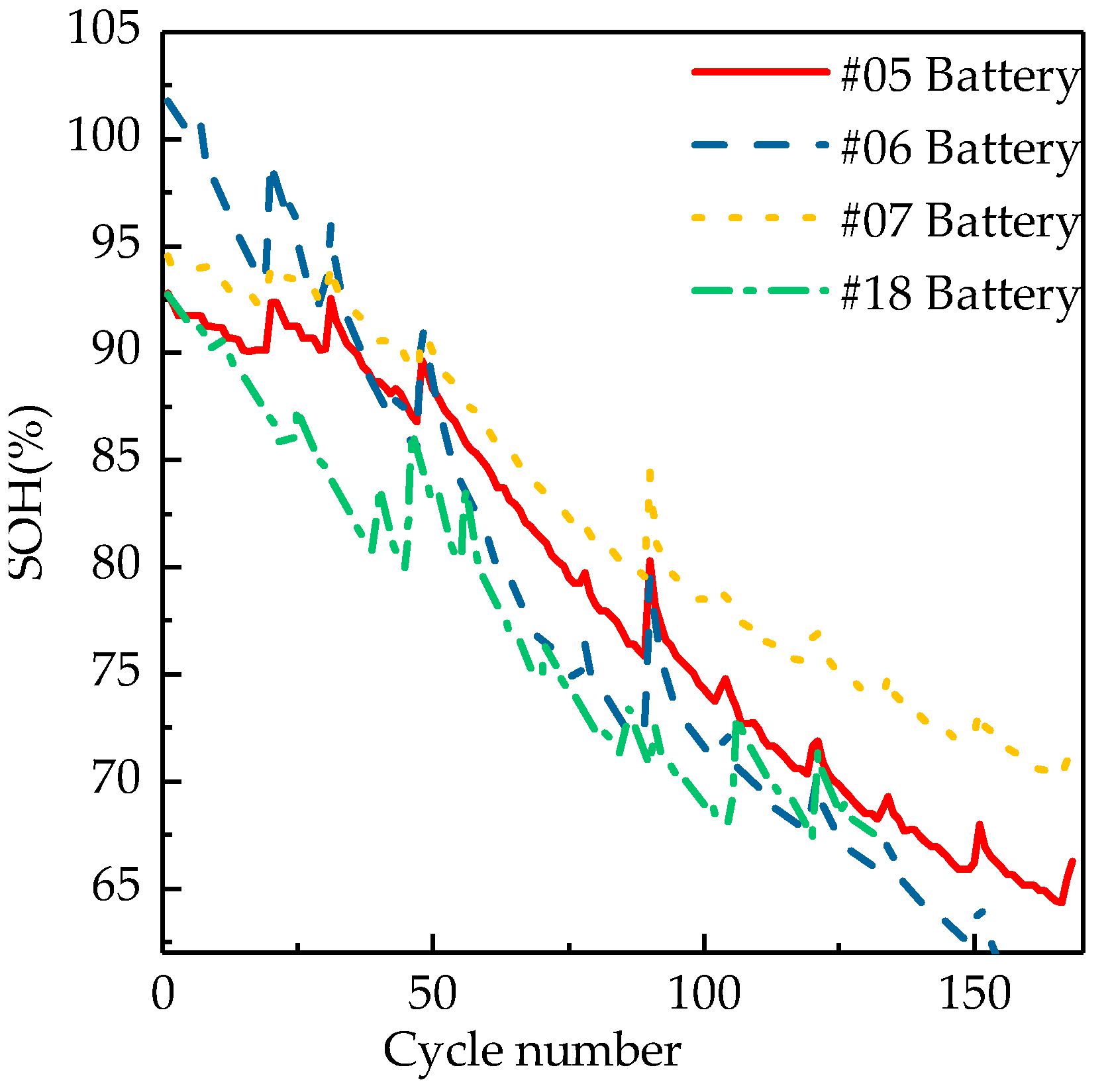
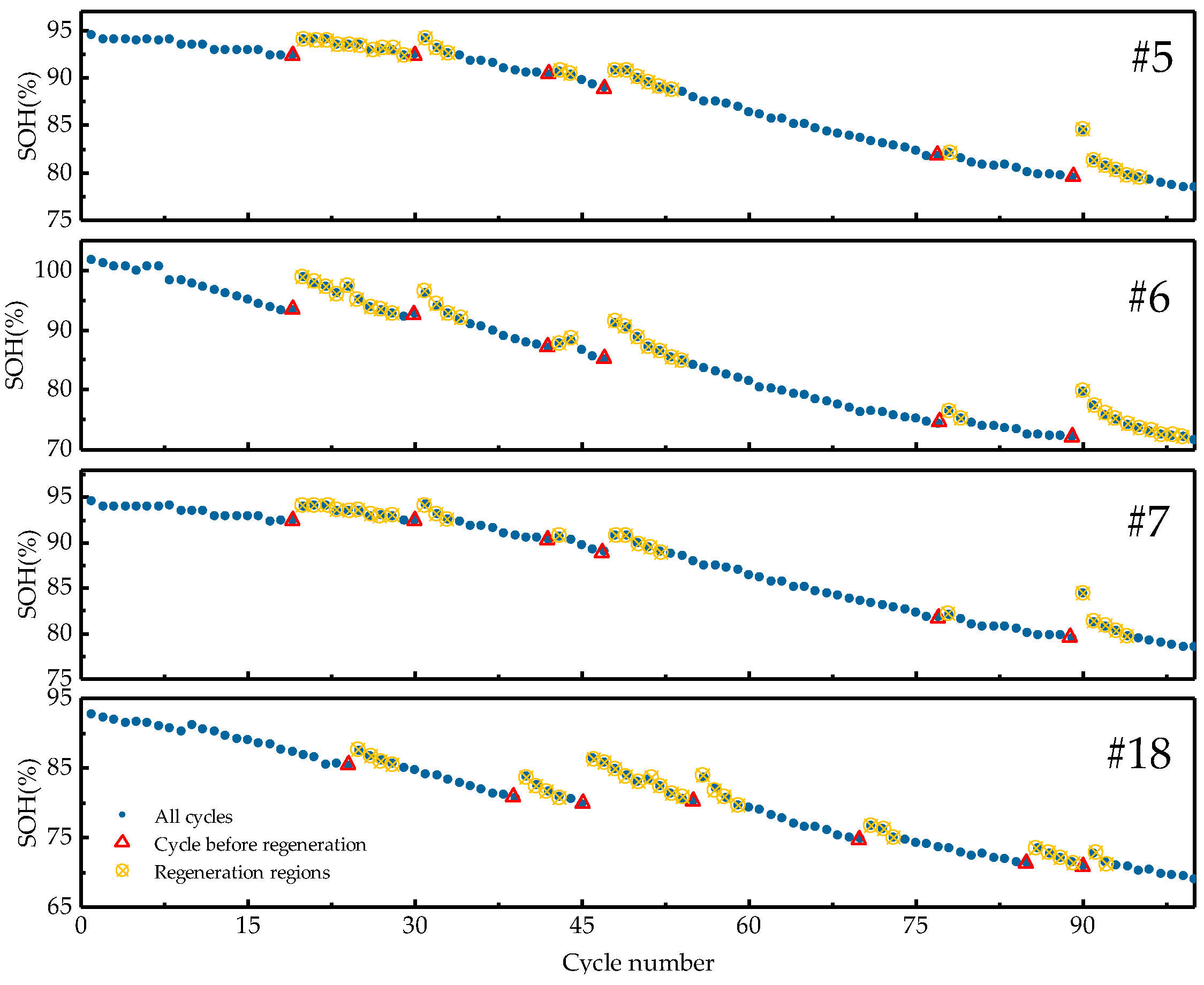
4.1. Experiment Battery Dataset
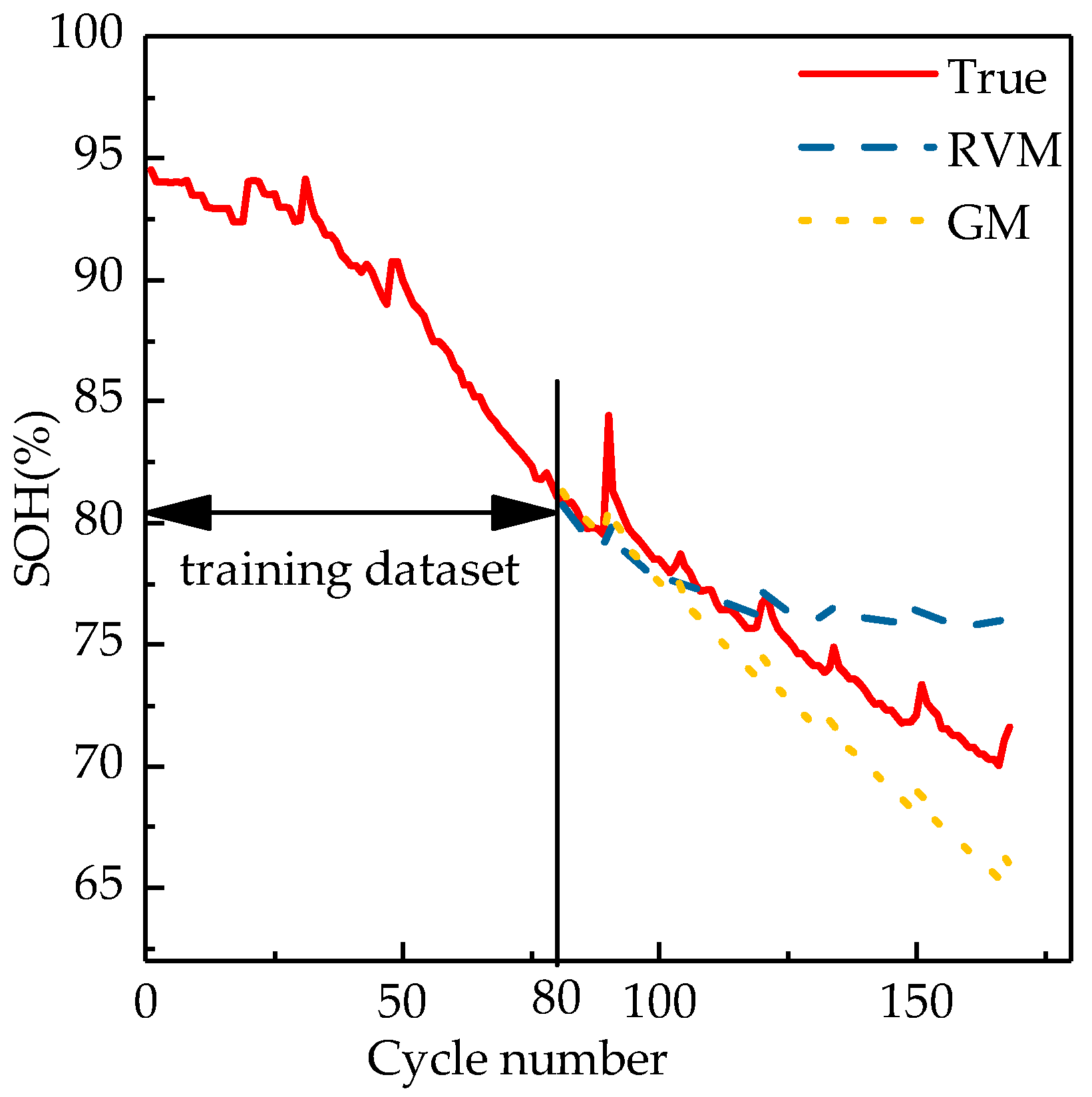
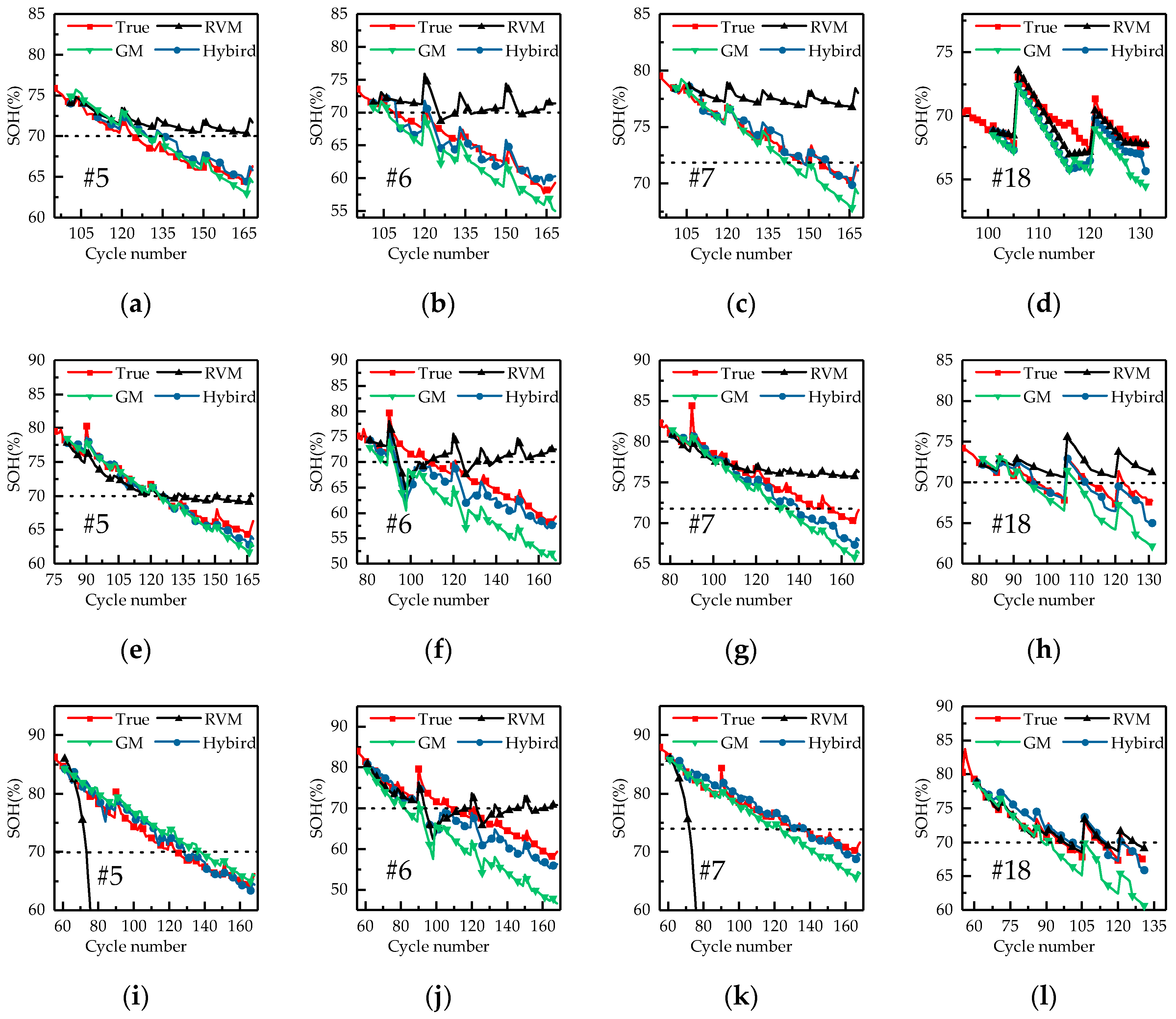
4.2. Experiment and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Su, C.; Chen, H.J. A review on prognostics approaches for remaining useful life of lithium-ion battery. In International Conference on New Energy and Future Energy System, Kunming, China, 22–25 September 2017; Kyriakopoulos, G.L., Ed.; IOP Publishing: Bristol, UK, 2017; Volume 93, p. 012040. [Google Scholar] [Green Version]
- Lyu, C.; Lai, Q.; Ge, T.; Yu, H.; Wang, L.; Ma, N. A lead-acid battery’s remaining useful life prediction by using electrochemical model in the particle filtering framework. Energy 2017, 120, 975–984. [Google Scholar] [CrossRef]
- Barre, A.; Deguilhem, B.; Grolleau, S.; Gerard, M.; Suard, F.; Riu, D. A review on lithium-ion battery ageing mechanisms and estimations for automotive applications. J. Power Sources 2013, 241, 680–689. [Google Scholar] [CrossRef]
- Liu, D.; Yin, X.; Song, Y.; Liu, W.; Peng, Y. An on-line state of health estimation of lithium-ion battery using unscented particle filter. Ieee Access 2018, 6, 40990–41001. [Google Scholar] [CrossRef]
- Omariba, Z.B.; Zhang, L.; Sun, D. Review on health management system for lithium-ion batteries of electric vehicles. Electronics 2018, 7, 72. [Google Scholar] [CrossRef]
- Li, F.; Xu, J. A new prognostics method for state of health estimation of lithium-ion batteries based on a mixture of gaussian process models and particle filter. Microelectron. Reliab. 2015, 55, 1035–1045. [Google Scholar] [CrossRef]
- Chang, Y.; Fang, H.; Zhang, Y. A new hybrid method for the prediction of the remaining useful life of a lithium-ion battery. Appl. Energy 2017, 206, 1564–1578. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Zhang, L.; Mu, Z.; Sun, C. Remaining useful life prediction for lithium-ion batteries based on exponential model and particle filter. IEEE Access 2018, 6, 17729–17740. [Google Scholar] [CrossRef]
- Su, X.; Wang, S.; Pecht, M.; Ma, P.; Zhao, L. Prognostics of lithium-ion batteries based on different dimensional state equations in the particle filtering method. Trans. Inst. Meas. Control 2017, 39, 1537–1546. [Google Scholar] [CrossRef]
- Yang, F.; Wang, D.; Xing, Y.; Tsui, K.-L. Prognostics of li(nimnco)o-2-based lithium-ion batteries using a novel battery degradation model. Microelectron. Reliab. 2017, 70, 70–78. [Google Scholar] [CrossRef]
- Wang, D.; Miao, Q.; Pecht, M. Prognostics of lithium-ion batteries based on relevance vectors and a conditional three-parameter capacity degradation model. J. Power Sources 2013, 239, 253–264. [Google Scholar] [CrossRef]
- Saha, B.; Goebel, K.; Poll, S.; Christophersen, J. Prognostics methods for battery health monitoring using a bayesian framework. IEEE Trans. Instrum. Meas. 2009, 58, 291–296. [Google Scholar] [CrossRef]
- Xing, Y.J.; Ma, E.W.M.; Tsui, K.L.; Pecht, M. An ensemble model for predicting the remaining useful performance of lithium-ion batteries. Microelectron. Reliab. 2013, 53, 811–820. [Google Scholar] [CrossRef]
- Song, Y.; Liu, D.; Hou, Y.; Yu, J.; Peng, Y. Satellite lithium-ion battery remaining useful life estimation with an iterative updated rvm fused with the kf algorithm. Chin. J. Aeronaut. 2018, 31, 31–40. [Google Scholar] [CrossRef]
- Zheng, X.; Fang, H. An integrated unscented kalman filter and relevance vector regression approach for lithium-ion battery remaining useful life and short-term capacity prediction. Reliab. Eng. Syst. Saf. 2015, 144, 74–82. [Google Scholar] [CrossRef]
- Wei, J.; Dong, G.; Chen, Z. Remaining useful life prediction and state of health diagnosis for lithium-ion batteries using particle filter and support vector regression. IEEE Trans. Ind. Electron. 2018, 65, 5634–5643. [Google Scholar] [CrossRef]
- Wu, L.; Fu, X.; Guan, Y. Review of the remaining useful life prognostics of vehicle lithium-ion batteries using data-driven methodologies. Appl. Sci. 2016, 6, 166. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M.G. Long short-term memory recurrent neural network for remaining useful life prediction of lithium-ion batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Sbarufatti, C.; Corbetta, M.; Giglio, M.; Cadini, F. Adaptive prognosis of lithium-ion batteries based on the combination of particle filters and radial basis function neural networks. J. Power Sources 2017, 344, 128–140. [Google Scholar] [CrossRef]
- Gao, D.; Huang, M. Prediction of remaining useful life of lithium-ion battery based on multi-kernel support vector machine with particle swarm optimization. J. Power Electron. 2017, 17, 1288–1297. [Google Scholar]
- Zhao, Q.; Qin, X.; Zhao, H.; Feng, W. A novel prediction method based on the support vector regression for the remaining useful life of lithium-ion batteries. Microelectron. Reliab. 2018, 85, 99–108. [Google Scholar] [CrossRef]
- Yang, W.-A.; Xiao, M.; Zhou, W.; Guo, Y.; Liao, W. A hybrid prognostic approach for remaining useful life prediction of lithium-ion batteries. Shock and Vibration 2016, 2016, 3838765. [Google Scholar] [CrossRef]
- Liao, L.; Koettig, F. A hybrid framework combining data-driven and model-based methods for system remaining useful life prediction. Appl. Soft Comput. 2016, 44, 191–199. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Ma, F.; Yang, Y.B.; Yang, C.S. A data-model-fusion prognostic framework for dynamic system state forecasting. Eng. Appl. Artif. Intell. 2012, 25, 814–823. [Google Scholar] [CrossRef] [Green Version]
- Dong, G.; Chen, Z.; Wei, J.; Ling, Q. Battery health prognosis using brownian motion modeling and particle filtering. IEEE Trans. Ind. Electron. 2018, 65, 8646–8655. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, M. Lithium-ion batteries remaining useful life prediction based on a mixture of empirical mode decomposition and arima model. Microelectron. Reliab. 2016, 65, 265–273. [Google Scholar] [CrossRef]
- Zhang, J.; He, X.; Si, X.; Hu, C.; Zhou, D. A novel multi-phase stochastic model for lithium-ion batteries’ degradation with regeneration phenomena. Energies 2017, 10, 1687. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Liao, H.; Peng, Y.; Peng, X. A health indicator extraction and optimization framework for lithium-ion battery degradation modeling and prognostics. IEEE Trans. Syst. Man Cybern.-Syst. 2015, 45, 915–928. [Google Scholar]
- Qin, T.; Zeng, S.; Guo, J.; Skaf, Z. A rest time-based prognostic framework for state of health estimation of lithium-ion batteries with regeneration phenomena. Energies 2016, 9, 896. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Zhou, Z.; Huang, Y.; Lu, Y.; Shi, Z.; Zhu, L.; Wu, J.; Li, H. Lithium-ion battery remaining useful life prediction under grey theory framework. In Proceedings of the 2014 prognostics and system health management conference, Zhangjiajie, China, 24–27 August 2014; IEEE: Piscataway, NJ, USA; pp. 297–300. [Google Scholar]
- Goebel, B.S.a.K. Battery data set. National Aeronautics and Space Adminstration (NASA) Ames Prognostics Data Repository.; Moffett Field: CA, USA, 2007. Available online: https://ti.arc.nasa.gov/tech/dash/groups/pcoe/prognostic-data-repository/ (accessed on 20 October 2018).
- Eddahech, A.; Briat, O.; Vinassa, J.-M. Lithium-ion battery performance improvement based on capacity recovery exploitation. Electrochim. Acta 2013, 114, 750–757. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prediction Start Cycle | Battery Number | Hybrid Model | RVM | GM | |||
|---|---|---|---|---|---|---|---|
| AE | RMSE (%) | AE | RMSE (%) | AE | RMSE (%) | ||
| 100 | #5 | 4 | 0.960422 | - | 3.59411 | 4 | 1.025602 |
| #6 | 1 | 1.241741 | 16 | 6.886879 | 2 | 2.576045 | |
| #7 | 1 | 0.921971 | - | 4.071211 | 5 | 1.099363 | |
| #18 | - | 1.520362 | - | 0.803822 | - | 1.95701 | |
| 80 | #5 | 1 | 0.8253 | 1 | 2.27695 | 1 | 1.132771 |
| #6 | 15 | 3.06826 | 14 | 6.679174 | 16 | 6.349727 | |
| #7 | 7 | 1.191789 | - | 2.726045 | 16 | 2.48364 | |
| #18 | 1 | 1.015091 | - | 2.278513 | 3 | 2.664143 | |
| 60 | #5 | 4 | 1.033175 | 54 | 69.82189 | 13 | 2.724726 |
| #6 | 15 | 3.338834 | 15 | 5.403552 | 26 | 8.576316 | |
| #7 | 1 | 0.996845 | 74 | 69.76426 | 12 | 2.203527 | |
| #18 | 4 | 1.111508 | 1 | 0.708308 | 8 | 3.333486 | |
| Battery Number | Prediction Start Cycle | Absolute Error of RUL Prediction Result | |
|---|---|---|---|
| Hybrid Method | RVM-KF Method | ||
| #5 | 60 | 28 | 4 |
| 80 | 8 | 1 | |
| 100 | 4 | 4 | |
| #6 | 60 | 32 | 15 |
| 80 | 2 | 15 | |
| 90 | 3 | 2 | |
| #7 | 60 | 39 | 1 |
| 80 | 19 | 7 | |
| 100 | 1 | 1 | |
| #18 | 60 | 4 | 8 |
| 80 | 1 | 5 | |
| 100 | - | - | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, L.; Wang, Y.; Cheng, J. A Hybrid Method for Remaining Useful Life Estimation of Lithium-Ion Battery with Regeneration Phenomena. Appl. Sci. 2019, 9, 1890. https://doi.org/10.3390/app9091890
Zhao L, Wang Y, Cheng J. A Hybrid Method for Remaining Useful Life Estimation of Lithium-Ion Battery with Regeneration Phenomena. Applied Sciences. 2019; 9(9):1890. https://doi.org/10.3390/app9091890
Chicago/Turabian StyleZhao, Lin, Yipeng Wang, and Jianhua Cheng. 2019. "A Hybrid Method for Remaining Useful Life Estimation of Lithium-Ion Battery with Regeneration Phenomena" Applied Sciences 9, no. 9: 1890. https://doi.org/10.3390/app9091890
APA StyleZhao, L., Wang, Y., & Cheng, J. (2019). A Hybrid Method for Remaining Useful Life Estimation of Lithium-Ion Battery with Regeneration Phenomena. Applied Sciences, 9(9), 1890. https://doi.org/10.3390/app9091890