Identification and Application of the Aerodynamic Admittance Functions of a Double-Deck Truss Girder


Abstract
1. Introduction
2. Aerodynamic Admittance Identification Methodology
3. Experiment and Turbulent Wind Generation
3.1. Segment Model
3.2. Test Conditions
- The service and construction stage test: the segment model was assembled with and without attachment to simulate the service and construction stages, respectively. The attachment could affect the geometric profile of the entire truss girder, with obvious changes in the aerostatic and aerodynamic characteristics of the segment model. The difference between these two stages is shown in Figure 3.
- The wind attack angle effect test: the segment model in the service stage was tested at wind attack angles α of 0°, 3° and 5°. The wind attack angle α is defined as the angle between the incoming wind direction and the segment model, adjusted by an α holder independent of the wind tunnel.
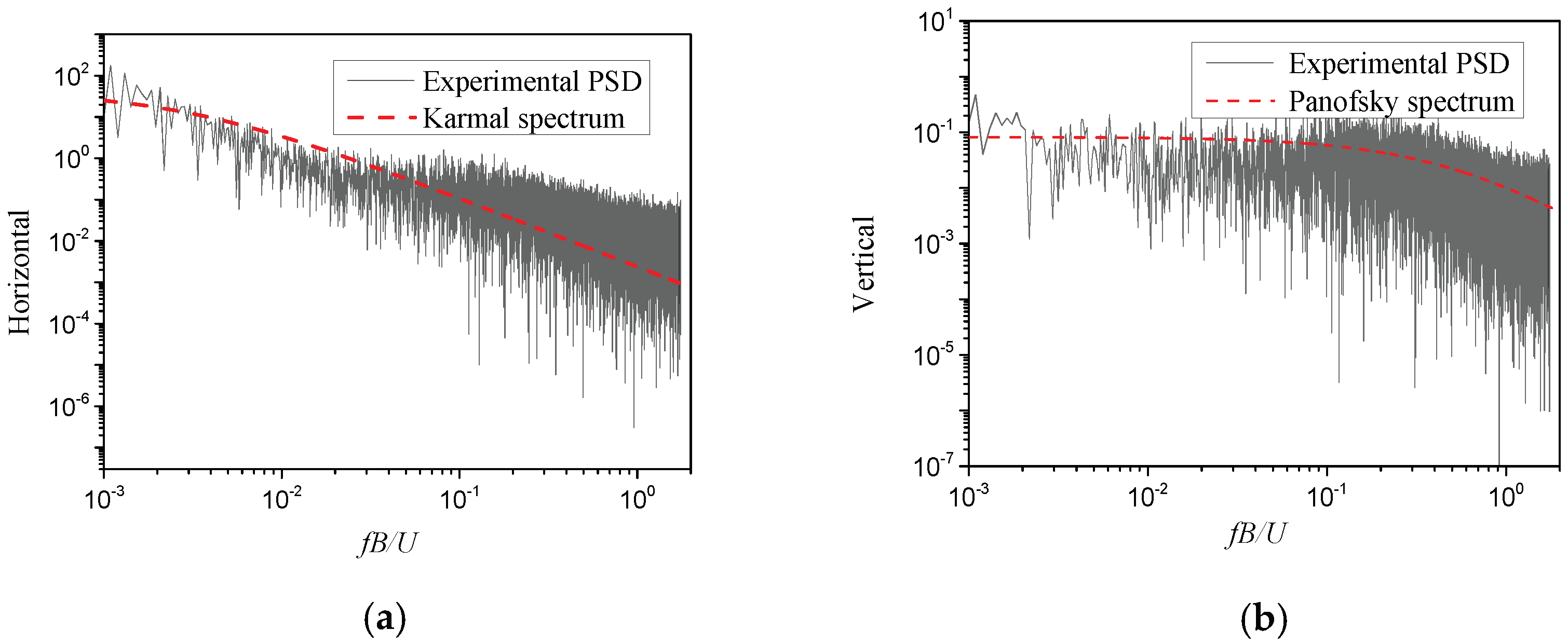
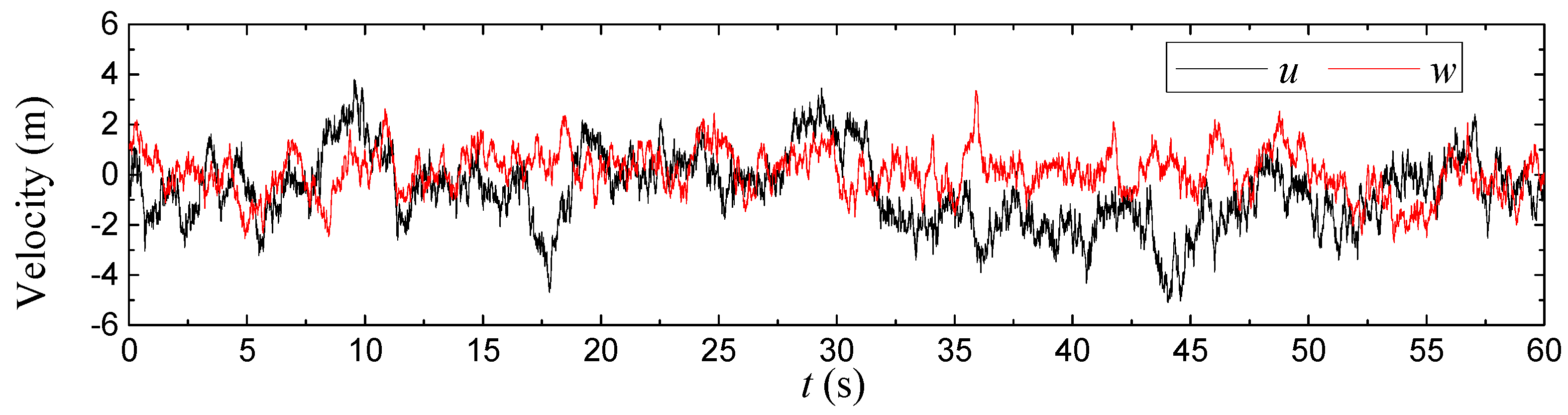
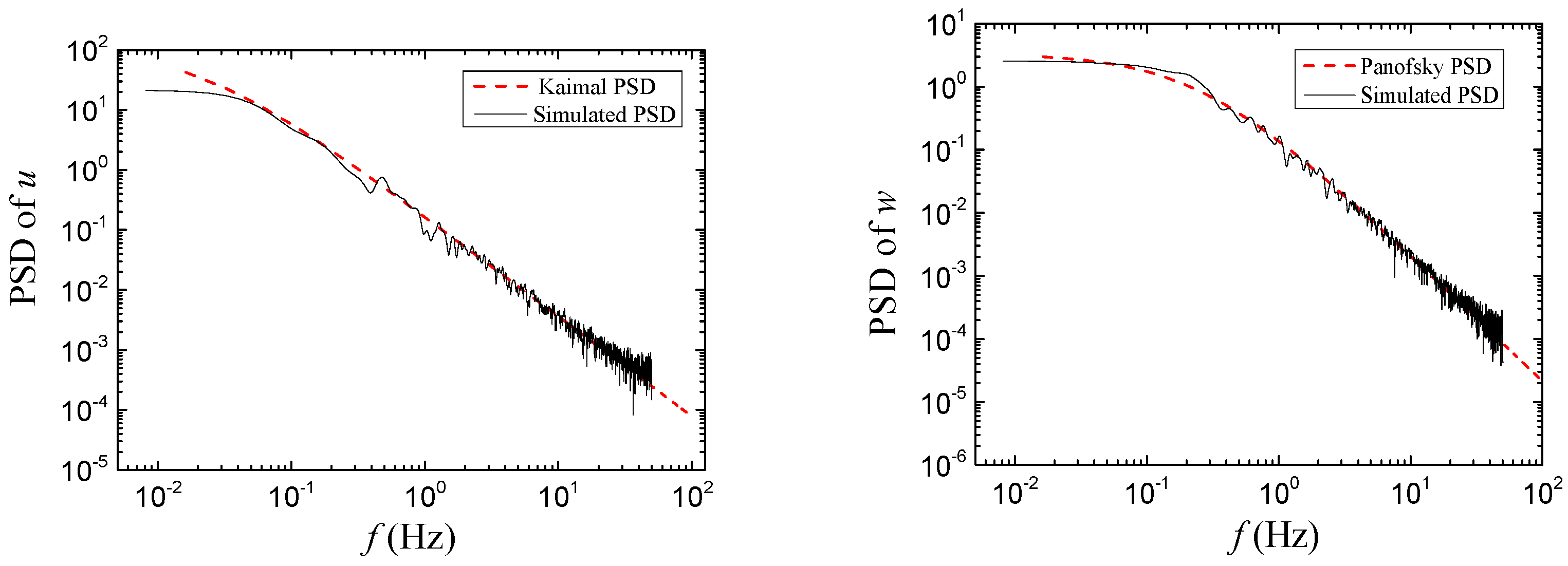
3.3. Turbulent Wind Flow Characteristics in the Wind Tunnel
4. Test Results
4.1. Aerodynamic Wind Force Coefficients and Derivatives
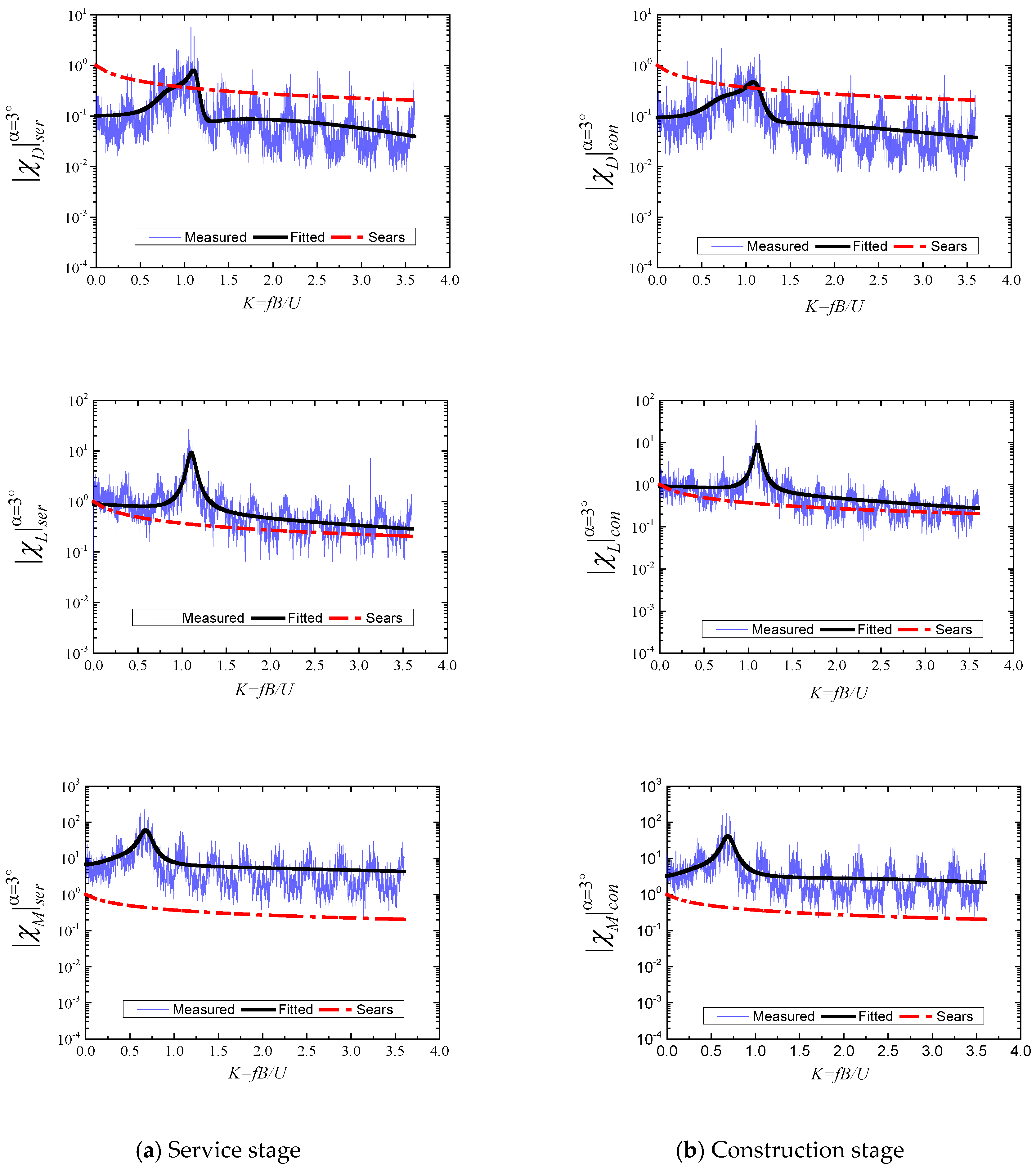
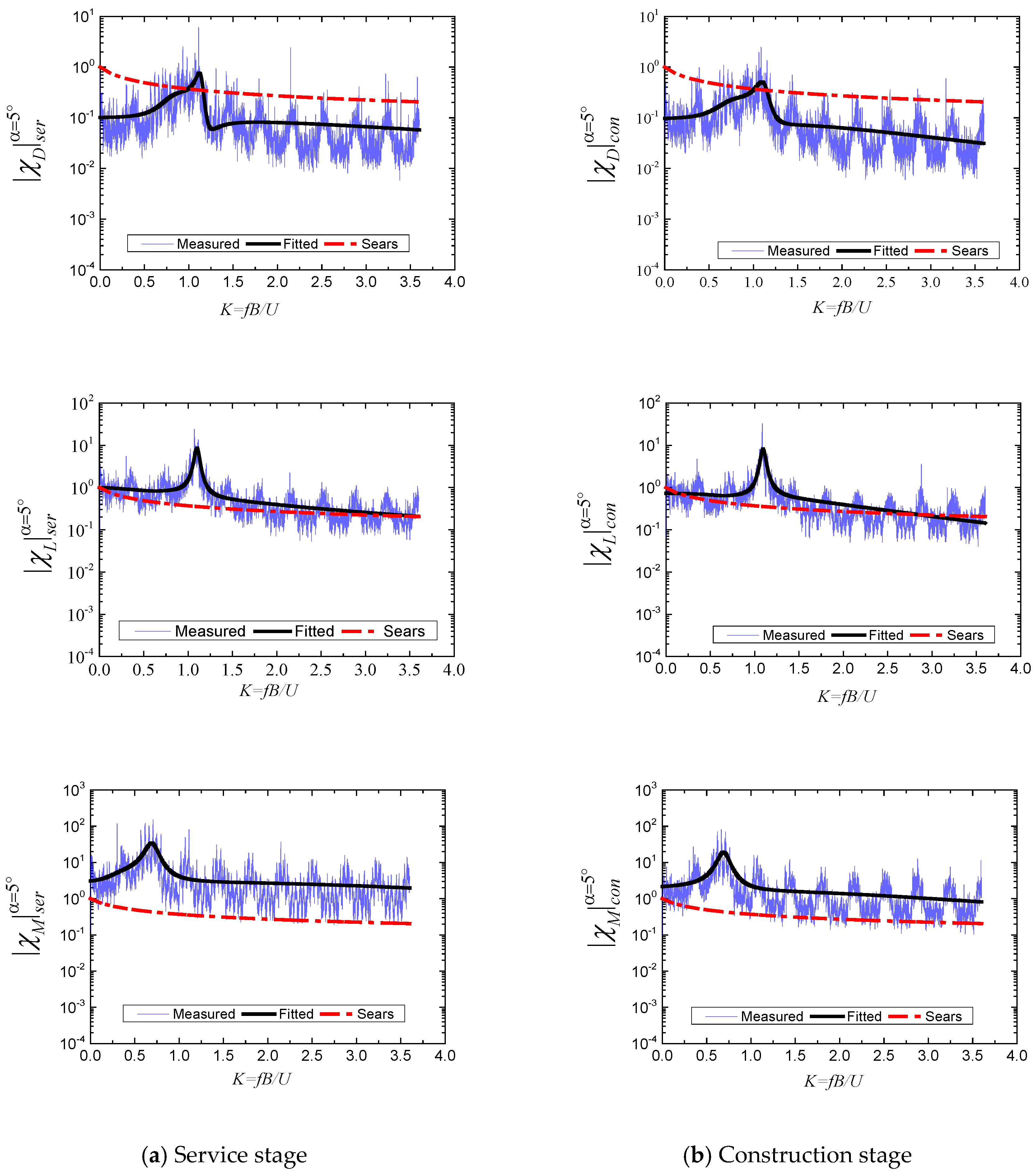
4.2. AAFs Identified by a Nonlinear Expression
5. AAF Numerical Application
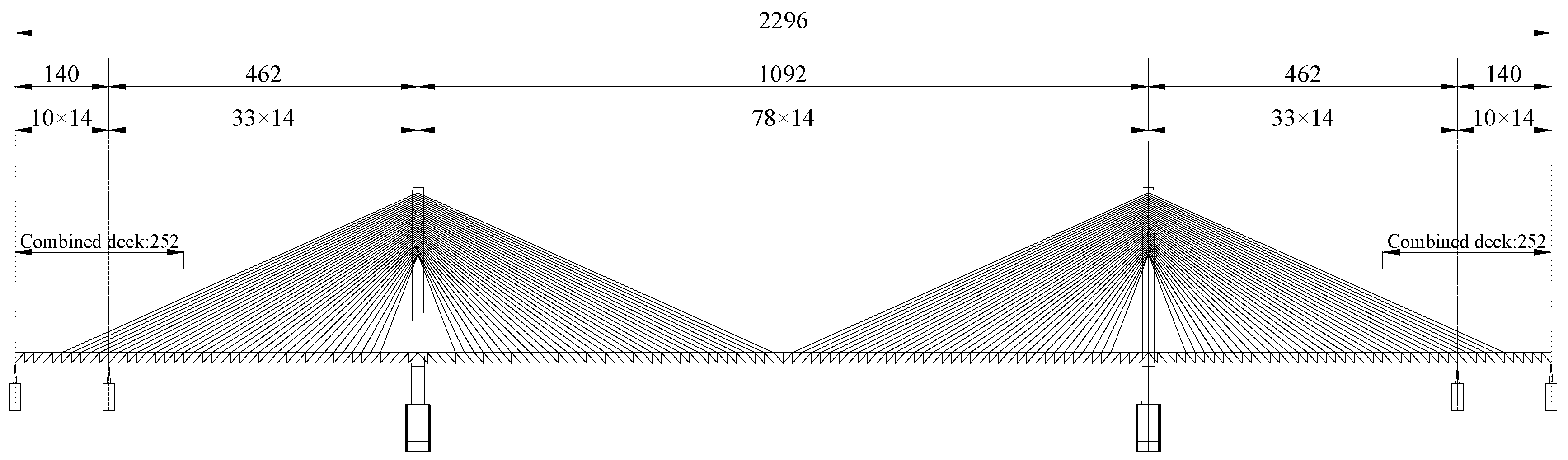
5.1. Description of the Case Bridge
5.2. Numerically Equivalent Model of the DDTG
5.3. Stochastic Modelling of the Wind Field at the Bridge Site
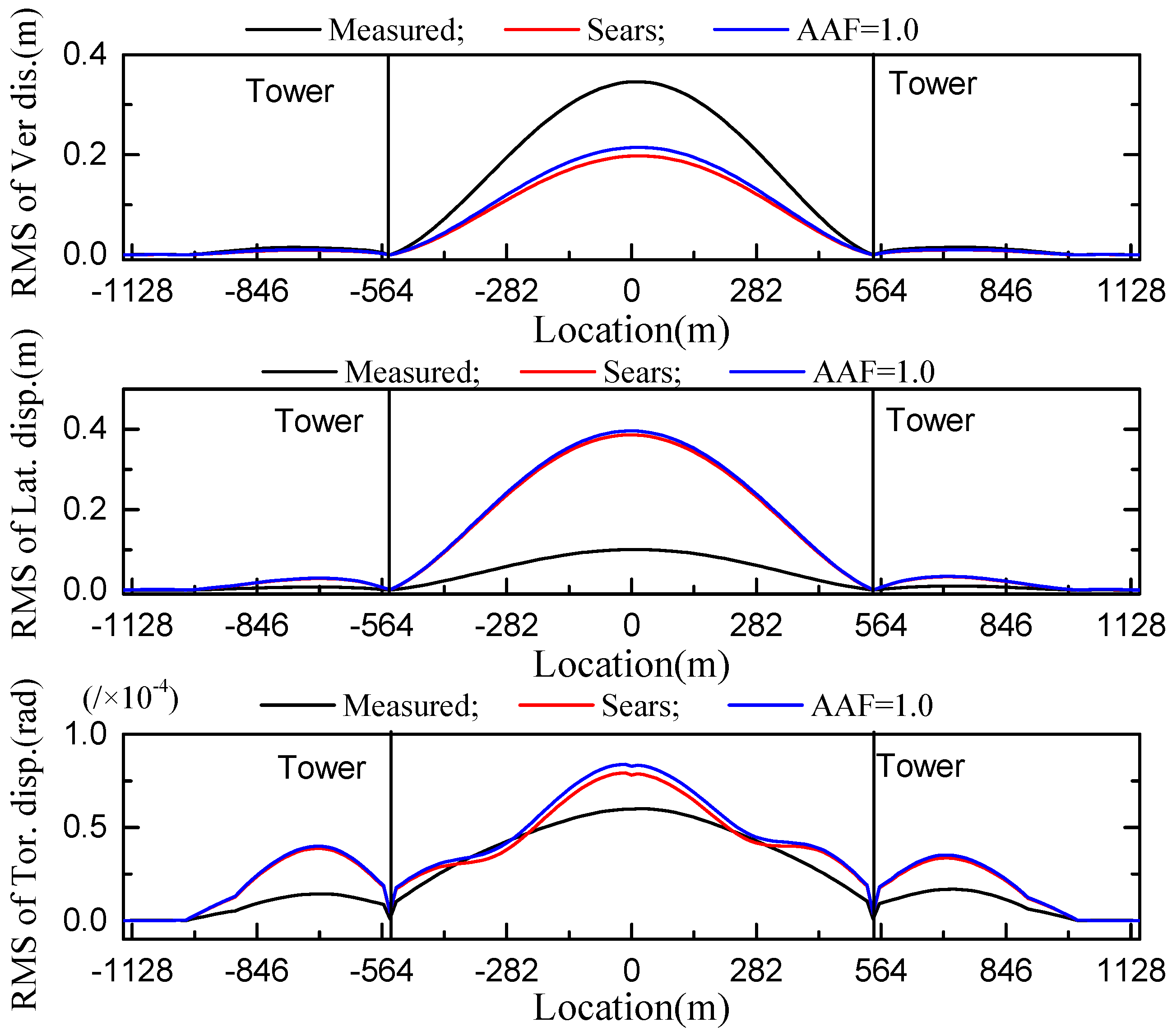
5.4. Buffeting Response Obtained Using Multiple AAF Types
6. Conclusions
- The AAFs of the DDTG were successfully obtained in the target turbulent wind field through wind tunnel tests based on the force measurement method. Typical service/construction stages and multiple wind attack angles (0°, 3° and 5°) were considered in the wind tunnel tests to identify the AAFs of the DDTG.
- In order to reduce fitting distortion caused by the resonance of the test system in the force measurement method, a modified nonlinear express was put forward to fit the AAFs of the DDTG in this paper. In the nonlinear expression, an additional item was introduced to fit the peak caused by resonance of the test system, and the traditional item was applied to fit the other unaffected experimental value. The combination of these two items can more efficiently match the experimental results of AAFs.
- According to the comparison between the identified AAFs of the DDTG and Sears functions, the Sears function is not applicable to the DDTG in both service and construction stages. With the α changing from 0° to 5°, the has a greater sensibility to the wind attack angle. When α = 0°, the vertical and torsion vibration occur more easily in the DDTG because the and both have larger values than the other wind attack angles.
- A “fish-bone” model with an equal mechanical property to the DDTG is put forward in this paper to compensate for the computational insufficiency of the 3D finite element model in the transient analysis. Through modal analysis, these two models almost have a similar mode shape and frequency, which confirmed the equivalence of these two models in dynamic analysis.
- According to the buffeting response comparison for three kinds of AAFs (AAF = 1.0, the Sears function and the identified AAFs), the Sears function or AAF = 1.0 leads to an inaccurate response estimation for the DDTG. The Sears function and AAF = 1.0 underestimate the vertical vibration amplitude and overestimate the lateral vibration amplitude in DDTG wind-resistant design.
Author Contributions
Funding
Conflicts of Interest
References
- He, X.; Wu, T.; Zou, Y.; Chen, Y.F.; Guo, H.; Yu, Z. Recent developments of high-speed railway bridges in China. Struct. Infrastruct. Eng. 2017, 13, 1584–1595. [Google Scholar] [CrossRef]
- Sears, W.R. Some aspects of non-stationary airfoil theory and its practical application. J. Aeronaut. Sci. 1941, 8, 104–108. [Google Scholar] [CrossRef]
- Liepmann, H.W. On the application of statistical concepts to the buffeting problem. Aeronaut. Sci. 1952, 1, 793–800. [Google Scholar] [CrossRef]
- Liepmann, H.W. Extension of the Statistical Approach to Buffeting and Gust Response of Wings of Finite Span. J. Aeronaut. Sci. 1955, 22, 197–200. [Google Scholar] [CrossRef]
- Graham, J.M.R. Lifting Surface Theory for the Problem of an Arbitrarily Yawed Sinusoidal Gust Incident on a Thin Aerofoil in Incompressible Flow. Aeronaut. Q. 1970, 21, 182–198. [Google Scholar]
- Graham, J.M.R. A Lifting-Surface Theory for the Rectangular Wing in Non-Stationary Flow. Aeronaut. Q. 1971, 22, 83–100. [Google Scholar]
- Filotas, L.T. Theory of Airfoil Response in a Gusty Atmosphere. Part II. Response to Discrete Gusts of Continuous Turbulence; University of Toronto: Toronto, ON, Canada, 1969. [Google Scholar]
- Filotas, L.T. Theory of Airfoil Response in a Gusty Atmosphere. Part, I. Aerodynamic Transfer Function; University of Toronto: Toronto, ON, Canada, 1969. [Google Scholar]
- Mugridge, B.D. Gust Loading on a Thin Aerofoil. Aeronaut. Q. 1971, 22, 301–310. [Google Scholar]
- Li, S.; Li, M.; Liao, H. The lift on an aerofoil in grid-generated turbulence. J. Fluid Mech. 2015, 771, 16–35. [Google Scholar] [CrossRef]
- Massaro, M.; Graham, J.M.R. The effect of three-dimensionality on the aerodynamic admittance of thin sections in free stream turbulence. J. Fluid Struct. 2015, 57, 81–90. [Google Scholar] [CrossRef]
- Jancauskas, E.D.; Melbourne, W.H. The aerodynamic admittance of two-dimensional rectangular section cylinders in smooth flow. J. Wind Eng. Ind. Aerodyn. 1986, 23, 395–408. [Google Scholar] [CrossRef]
- Scanlan, R.H. The action of flexible bridges under wind, II: Buffeting theory. J. Sound Vib. 1978, 60, 201–211. [Google Scholar] [CrossRef]
- Costa, C.; Borri, C.; Flamand, O.; Grillaud, G. Time-domain buffeting simulations for wind–bridge interaction. J. Wind Eng. Ind. Aerodyn. 2007, 95, 991–1006. [Google Scholar] [CrossRef]
- Hatanaka, A.; Tanaka, H. Aerodynamic admittance functions of rectangular cylinders. J. Wind Eng. Ind. Aerodyn. 2008, 96, 945–953. [Google Scholar] [CrossRef]
- Diana, G.; Resta, F.; Zasso, A.; Belloli, M.; Rocchi, D. Forced motion and free motion aeroelastic tests on a new concept dynamometric section model of the Messina suspension bridge. J. Wind Eng. Ind. Aerodyn. 2004, 92, 441–462. [Google Scholar] [CrossRef]
- Larose, G.L.; Mann, J. Gust loading on streamlined bridge decks. J. Fluid Struct. 1998, 12, 511–536. [Google Scholar] [CrossRef]
- Zhu, L.; Zhou, Q.; Ding, Q.; Xu, Z. Identification and application of six-component aerodynamic admittance functions of a closed-box bridge deck. J. Wind Eng. Ind. Aerodyn. 2018, 172, 268–279. [Google Scholar] [CrossRef]
- Larose, G.L. Experimental determination of the aerodynamic admittance of a bridge deck segment. J. Fluid Struct. 1999, 13, 1029–1040. [Google Scholar] [CrossRef]
- Sato, H.K.M.M. Evaluation of aerodynamic admittance for the stiffening girder of the Akashi Kaikyo Bridge. In Proceedings of the 13th Japan National Symposium on Wind Engineering, Tokyo, Japan, November 1994; pp. 131–136. [Google Scholar]
- Xu, Y.L.; Sun, D.K.; Ko, J.M.; Lin, J.H. Buffeting analysis of long span bridges: A new algorithm. Comput. Struct. 1998, 68, 303–313. [Google Scholar] [CrossRef]
- Scanlan, R.H.; Jones, N.P. A form of aerodynamic admittance for use in bridge aeroelastic analysis. J. Fluid Struct. 1999, 13, 1017–1027. [Google Scholar] [CrossRef]
- Chen, X.; Matsumoto, M.; Kareem, A. Time domain flutter and buffeting response analysis of bridges. J. Eng. Mech. 2000, 126, 7–16. [Google Scholar] [CrossRef]
- Davenport, A.G. Buffeting of suspension bridge by storm winds. J. Struct. Div. 1962, 88, 233–270. [Google Scholar]
- Gu, M.; Qin, X. Direct identification of flutter derivatives and aerodynamic admittances of bridge decks. Eng. Struct. 2004, 26, 2161–2172. [Google Scholar] [CrossRef]
- Li, S.; Li, M.; Larose, G.L. Aerodynamic admittance of streamlined bridge decks. J. Fluid Struct. 2018, 78, 1–23. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Wyngaard, J.C.; Izumi, Y.; Coté, O.R. Spectral characteristics of surface-layer turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- Panofsky, H.A.; McCormick, R.A. The spectrum of vertical velocity near the surface. Q. J. R. Meteorol. Soc. 1960, 86, 495–503. [Google Scholar] [CrossRef]
- Liu, H.S.; Lei, J.Q. Identification of three-component coefficients of double deck truss girder for long-span bridge. J. Zhejiang Univ. (Eng. Sci.) 2019, 53, 1–9. [Google Scholar]
- Yu, T.; Shixiong, Z.; Longqi, Z. Numerical method for identifying the aerodynamic admittance of bridge deck. Acta Aerodyn. Sin. 2015, 33, 706–713. [Google Scholar]
- Solari, G.; Piccardo, G. Probabilistic 3-D turbulence modeling for gust buffeting of structures. Probabilist Eng. Mech. 2001, 16, 73–86. [Google Scholar] [CrossRef]
- Di Paola, M.; Gullo, I. Digital generation of multivariate wind field processes. Probabilist Eng. Mech. 2001, 16, 1–10. [Google Scholar] [CrossRef]
- Domaneschi, M.; Martinelli, L.; Po, E. Control of wind buffeting vibrations in a suspension bridge by TMD: Hybridization and robustness issues. Comput. Struct. 2015, 155, 3–17. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| U | Mean velocity of turbulence |
| B, H, L | Width, height and length of segment model |
| z | Relative elevation of DDTG |
| u, v, w | Velocity components of turbulence |
| α | Wind attack angle |
| FD, FL, FM | Measured drag force, lift force and pitch moment |
| CD, CL, CM | Drag, lift and pitch moment coefficients |
| ,, | Derivatives of drag, lift and pitch moment coefficients |
| Su, Sw | Power spectra of velocity components in the u and w directions |
| SD, SL, SM | Power spectra of drag, lift and pitch moment |
| Ixx, Iyy, Izz | Inertia moments of an equivalent girder |
| α (°) | ||||||
|---|---|---|---|---|---|---|
| 0° | 0.8362 | −0.0139 | −0.0848 | 0.1023 | −0.0028 | 0.0027 |
| 3° | 0.8659 | 0.0283 | 0.3035 | 0.1089 | 0.0123 | 0.0063 |
| 5° | 0.9368 | 0.0424 | 0.4355 | 0.0680 | 0.0268 | 0.0102 |
| α (°) | ||||||
|---|---|---|---|---|---|---|
| 0° | 0.7286 | −0.0017 | −0.1831 | 0.1793 | 0.0070 | 0.0043 |
| 3° | 0.7864 | 0.0368 | 0.4713 | 0.1755 | 0.0196 | 0.0087 |
| 5° | 0.8751 | 0.0498 | 0.6509 | 0.0892 | 0.0471 | 0.0126 |
| Item | Ang. | Service Stage | Construction Stage | ||||||
|---|---|---|---|---|---|---|---|---|---|
| α | τ | β | γ | α | τ | β | γ | ||
| 0 | 0.1176 | 1.305 | 0.0155 | 3.629 | 0.1191 | 1.816 | 0.09806 | 1.699 | |
| 3 | 0.2966 | 2.985 | 0.0271 | 3.975 | 0.5859 | 6.499 | 0.3943 | 2.442 | |
| 5 | 5.525 | 55.43 | 2.472 | 2.170 | 0.2502 | 2.637 | 0.2139 | 2.509 | |
| 0 | 0.7604 | 0.2978 | 0.3601 | 1.034 | 0.9118 | 0.5752 | 0.2288 | 1.779 | |
| 3 | 0.2108 | 0.2463 | 0.0950 | 1.290 | 0.4404 | 0.4932 | 0.1545 | 1.544 | |
| 5 | 1.961 | 1.970 | 1.054 | 1.533 | 0.5388 | 0.7341 | 0.1107 | 2.577 | |
| 0 | 6.052 | 0.3494 | 0.0013 | 3.706 | 7.333 | 0.6799 | 0.0691 | 1.644 | |
| 3 | 2.432 | 0.3752 | 0.0261 | 1.518 | 2.052 | 0.7196 | 0.0015 | 3.937 | |
| 5 | 1.960 | 0.6928 | 0.0062 | 3.050 | 1.241 | 0.6413 | 0.0117 | 2.577 | |
| Parameters | Value |
|---|---|
| Weight per metre of composite girder | 87,029 kg/m |
| Weight per metre of steel girder | 48,873 kg/m |
| Additional highway concrete deck load | 9102.04 kg/m |
| Additional highway steel deck load | 5469.39 kg/m |
| Additional railway load | 28,440 kg/m |
| Material damping ratio | 0.005 |
| Section Type | Ixx | Iyy | Izz |
|---|---|---|---|
| Composite girder | 687.8 | 168.6 | 679.3 |
| Steel girder | 273.3 | 108.6 | 502.3 |
| Mode Description | Frequency (Hz) | ||
|---|---|---|---|
| 3D Model | Fish-Bone | Err. (%) | |
| 1st sym lateral bending movement | 0.1013 | 0.1032 | 1.88% |
| 1st sym vertical bending movement | 0.1920 | 0.1990 | 3.65% |
| 1st asym vertical bending movement | 0.2713 | 0.2731 | 0.66% |
| 1st asym lateral bending movement | 0.2810 | 0.2928 | 4.2% |
| 2nd sym vertical bending movement | 0.4340 | 0.4630 | 6.68% |
| 2nd asym vertical bending movement | 0.4405 | 0.4479 | 1.68% |
| 1st sym torsional and weak lateral bending movement | 0.4590 | 0.4726 | 2.96% |
| 2nd asym lateral bending movement | 0.4777 | 0.5072 | 6.18% |
| Direction | Service Stage | Construction Stage | ||||
|---|---|---|---|---|---|---|
| Measured | Sears | 1.0 | Measured | Sears | 1.0 | |
| Vertical disp.(m) | 0.346 | 0.198 | 0.215 | 0.312 | 0.156 | 0.171 |
| Lateral disp.(m) | 0.101 | 0.386 | 0.396 | 0.073 | 0.271 | 0.280 |
| Torsion disp. (rad/×10−5) | 6.008 | 7.925 | 8.391 | 10.12 | 10.62 | 10.90 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Lei, J.; Zhu, L. Identification and Application of the Aerodynamic Admittance Functions of a Double-Deck Truss Girder. Appl. Sci. 2019, 9, 1818. https://doi.org/10.3390/app9091818
Liu H, Lei J, Zhu L. Identification and Application of the Aerodynamic Admittance Functions of a Double-Deck Truss Girder. Applied Sciences. 2019; 9(9):1818. https://doi.org/10.3390/app9091818
Chicago/Turabian StyleLiu, Haosu, Junqing Lei, and Li Zhu. 2019. "Identification and Application of the Aerodynamic Admittance Functions of a Double-Deck Truss Girder" Applied Sciences 9, no. 9: 1818. https://doi.org/10.3390/app9091818
APA StyleLiu, H., Lei, J., & Zhu, L. (2019). Identification and Application of the Aerodynamic Admittance Functions of a Double-Deck Truss Girder. Applied Sciences, 9(9), 1818. https://doi.org/10.3390/app9091818