1. Introduction
To alleviate the effects of global warming caused by greenhouse gas emissions, governments across the world are actively promoting the development of sustainable energy and green industries as well as the reduction of carbon emissions. In response to this trend, electric vehicles have been listed as an important development objective for the automobile industry in Taiwan, particularly the electric motorcycle. Since 2015, at least 10% of locally produced or imported motorcycles in Taiwan must be pure electric motorcycles, hybrid electric motorcycles, or motorcycles with a start–stop function that meets the idling emission standards and hydrocarbon (HC) emission standards for the motorcycle crankcase, fuel tank, and fuel supply system set by the Taiwan Environmental Protection Administration [
1]. To comply with this regulation, the Taiwan Industrial Development Bureau has also been promoting electric motorcycles since 2009. However, as of March 2019, the total number of electric motorcycles in use was only 176,000. This low number of electric motorcycles was attributed to concerns about mileage and kinetic efficiency. The kinetic efficiency may be improved by an optimum design of a hybrid power system [
2]. Mileage anxiety can be solved by the development of alternative energy sources [
3,
4]. However, there remain major challenges to optimize the power utilization of electric motorcycles.
With regard to the development of hybrid electric motorcycles, Piaggio of Italy initially introduced a three-wheel hybrid motorcycle (MP3 Hybrid, Piaggio & C. SpA, Pontedera, Italy) in 2006. The MP3 Hybrid featured a 125-cc internal combustion engine (ICE) and a 2.6-kW electric motor. In addition, using a coaxial parallel system architecture, this motorcycle had five modes: electric motor drive, ICE drive/recharging, dual power drive, braking kinetic energy recycling, and reverse mode. Compared with other gasoline engine motorcycles in the same class, the MP3 Hybrid had 33% less CO
2 emissions and 45% less fuel consumption [
5]. In 2009, Yamaha showcased a hybrid motorcycle (HV-X Hybrid, Yamaha Motor Co. Ltd., Iwata, Shizuoka, Japan), which was equipped with a 250 cc ICE and a 15-kW electric motor. Based on the biaxial parallel-type system architecture, these two power sources were integrated or distributed by a single epicyclic gear train. The drive of the HV-X Hybrid could be manually switched between the pure ICE power mode or dual power mode. When traveling under 20 km/h, the vehicle was driven by the electric motor; otherwise, the vehicle was driven by the ICE. Thus, the prevention of both low-efficiency engine operation and idle-stops could be achieved [
6]. Subsequently, PGO introduced their hybrid motorcycle (Leon Hybrid 125, PGO Scooters Co. Ltd., Changhua, Taiwan) in 2010, which was equipped with a 125 cc ICE and an 800-W wheel-hub motor. A uniaxial parallel-type system architecture was designed because both the wheel-hub motor and ICE were powered by the rear wheel. The Leon Hybrid was driven by the electric motor at vehicle speeds under 15 km/h and by the dual power mode when speeds exceeded 40 km/h. The average fuel consumption was 70 km/L at a fixed speed of 50 km/h [
7].
In recent years, many studies have been conducted on hybrid electric vehicles to improve their performance or reduce environmental pollution. Hsu and Lu [
8] modified the design and production of the energy management system for a hybrid motorcycle, which carried a 125 cc ICE and a 1-kW electric motor based on a uniaxial parallel system architecture. At vehicle speeds less than 15 km/h, the motorcycle was driven by the electric motor. When the motorcycle speed exceeded 15 km/h, the ICE took over the power output. The ECE-40 (automobile regulations defined by Economic Commission of Europe) test showed that the ICE off-time accounted for approximately 47.5% of the total experiment time, which effectively reduced the quantity of pollutant emissions. Morandin et al. [
9] designed a powertrain for a hybrid motorcycle and compared different kinds of energy storage systems to find the best solution for balancing volume, cost, and weight. Walker and Roser [
10] performed a simulation based on two popular driving cycles of ECE and UDDS to understand the difference in fuel economy and essential costs of a hybrid motorcycle. UDDS refers to a United States Environmental Protection Agency mandated dynamometer test on fuel economy that represents city driving conditions which is used for light duty vehicle testing. Cheng and Hung [
11] proposed a planetary gear set and dual clutch hybrid electric system, and then compared the performance and energy management with a traditional power-split hybrid system. A maximum of 17% fuel economy improvement was obtained/achieved from their findings. Kebriaei et al. [
12] reviewed the literature on hybrid electric scooters and found that the performance of a vehicle could be improved using ultracapacitors, parallel-hybrid structure, or synergic electric power supply. Hung et al. [
13] designed a hybrid electric scooter with a novel mechanical, mechatronics, and control design that passed the ECE-40 emission test driving cycle. Masih-Tehrani and Dahmardeh [
14] developed a power distribution system algorithm for a hybrid energy storage system of the electric motorcycle. The battery cycle life, vehicle range, and regenerative braking energy recovery functions were enhanced by 2.6 times, 25%, and 29%, respectively. Nguyen et al. [
15] evaluated by computational analysis the fuel consumption and performance of a hybrid motorcycle with a front wheel electric motor that uses a lithium ion battery. Their design yielded fuel savings of up to 21.1% compared with the plug-in hybrid scooter. Sanli et al. [
16] proposed a direct borohydride-peroxide fuel cell-LiFePO
4 battery hybrid motorcycle. Their system showed satisfactory performance under constant load with efficiency of 67%. Farzaneh and Farjah [
17] developed a dynamic programming optimization strategy to calculate the effects of optimized speed over road curvature. Hanifah et al. [
18] designed a model of an electric motorcycle that incorporated both the kinetics and dynamics of the motorcycle. The performance was then evaluated by two tests: the worldwide motorcycle test cycle and new European driving cycle.
The fuel reduction and kinetic efficiency enhancement can be achieved by the electrification of motorcycles; especially, the state-of-the-art charging strategy has overcome the battery aging problems [
19,
20]. In this study, a hybrid electric motorcycle (HEM) was developed based on a novel parallel power system architecture. The powers integration or distribution of the ICE and integrated motor/generator was performed with an inverse differential gear mechanism. For different driving load requirements, a continuously variable transmission (CVT) was used to adjust the transmission speed reduction ratio to improve the operation of the ICE and integrated motor/generator. This allowed the motorcycle to meet control performance standards and improve its energy efficiency.
2. Materials and Methods
This section introduces, respectively, the system characteristics, power mode switching control strategy, experimental equipment, and test standards and specifications of the proposed HEM.
2.1. The System Characteristic of the Hybrid Electric Motorcycle
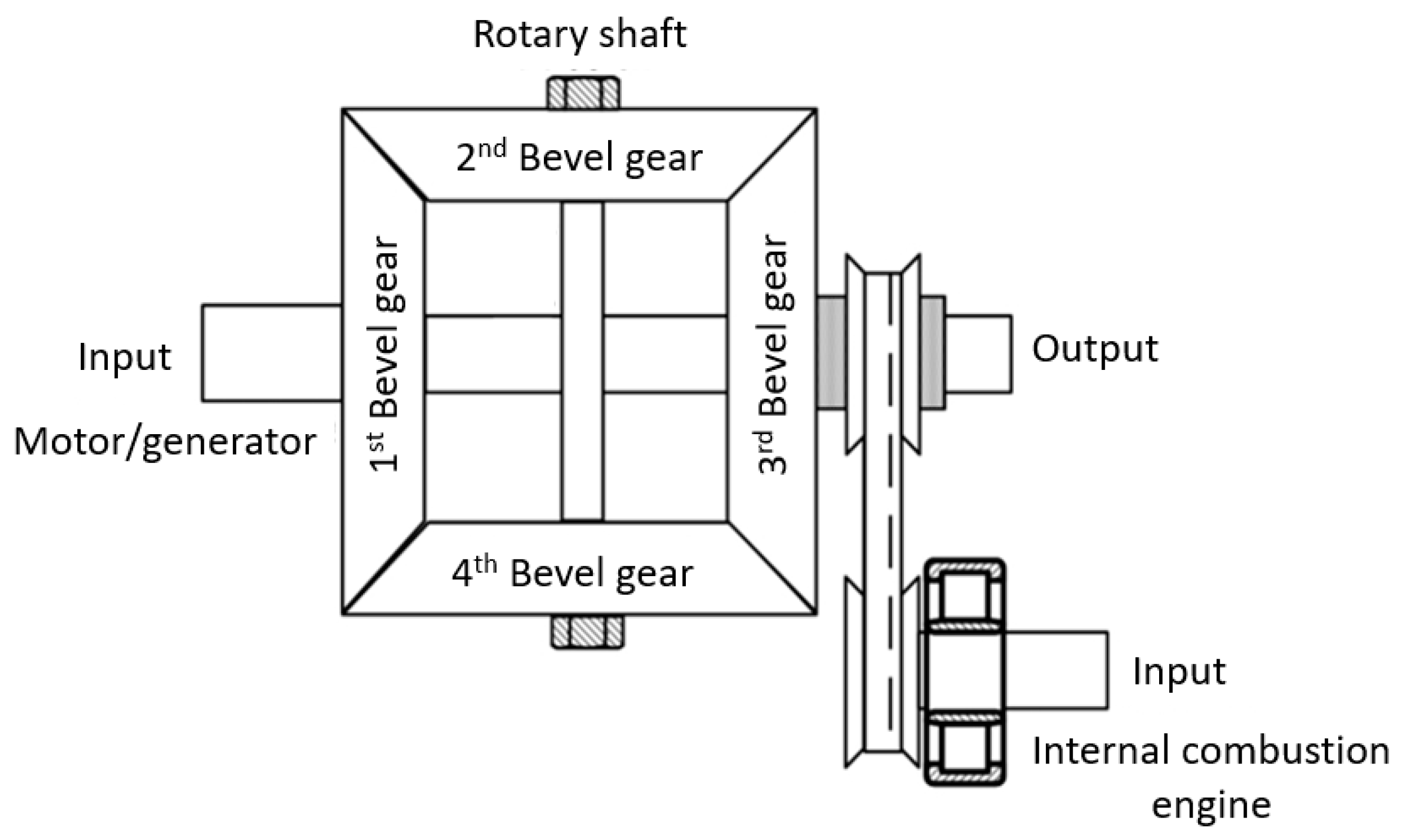
2.1.1. Inverse Differential Gear Power Splitter
The inverse differential gear power splitter used in this study was developed by our group and has been patented [
21]. This mechanism has two inputs and one output. These two inputs can be operated independently or integrated with each other. Thus, adequate control of the ICE’s rotational speed and torque load allows operation at optimum fuel efficiency. The setup of the inverse differential gear power splitter in our HEM is illustrated in
Figure 1.
When the vehicle system is running with low-power needs, the vehicle can be driven with the motor alone. After distribution by the mechanism, the power delivers twice the torque output, and the output axle’s rotational speed is half that of the motor rotational speed (w
1). When the driving load requirement exceeds that provided by the motor power, the vehicle can be switched to ICE mode. The generator’s power output can be controlled according to driving load requirements to keep the ICE in the optimal operating range. The output axle’s rotational speed is one-half the difference of the ICE rotational speed (w
3) and the generator rotational speed. When the vehicle is driving at high speed or with high load, the output power cannot meet the vehicle’s actual power needs because the ICE is set to operate in the optimal operating range. Thus, the motor power must be added to compensate for the ICE’s insufficient power output. The output axle’s rotational speed is one-half the sum of the ICE’s rotational speed and the motor’s rotational speed. The operation of the three modes is listed in
Table 1.
2.1.2. Integrated Motor/Generator and Lithium Battery Power Module
In our HEM, a modified 3-kW DC brushless motor (Taigene Metal Industry Co., Ltd., Taipei, Taiwan) was used. The specifications (
Table 2), T–N curve (
Figure 2a) and motor efficiency curve (
Figure 2b) of the original Taigene 3-kW DC brushless motor are shown. After modification, the controller had two functions: forward drive and forward/reverse power generation. In order to maximize space utilization and reduce transmission efficiency loss, the integrated motor/generator and inverse differential gear power splitter were directly connected. The lithium battery power module consists of 32 lithium ion batteries (LiFePO
4, Lifecell Battery Fty., Guangzhou, Guangdong, China). Each cell had a rated specification of 3.3 V/10 Ah.
The capacity of the battery module was preset as 48 V/20 Ah. The weight of the module was 16.99 kg with a volume of 36.7 × 18.8 × 22 cm
3. The charge and discharge current can reach the maximum of 100 A. The module was connected in parallel by two battery packs, each of which was connected in a series by 16 cells. The total voltage of the module after stringing was about 52.8 V. The battery pack had a working range of 36.8 to 58.4 V. Our energy management did not make the battery out of the operation range. In addition, the system was controlled by a battery management system (BMS). It can manage functions including state of charge (SOC) monitoring, low voltage protection, high voltage protection, and over current and over temperature protection. As reported by Sockeel et al. [
22], equivalent fuel consumption and battery aging can be accounted by SOC estimation, which can be included in our future study.
2.1.3. Internal Combustion Engine with Continuously Variable Transmission
The HEM was modified from a commercial 150-cc ICE motorcycle (GRAND DINK 150, Kwang Yang Motor Co., Ltd., Kaohsiung, Taiwan) which is abbreviated as GRAND DINK in the following article. We removed the traditional pull-rope throttle mechanism to improve the motor rotation throttle and achieve the electronic throttle function. The performance of the engine did not change after modification (
Table 3). Superior operating status of this modified engine was obtained according to the brake specific fuel consumption (BSFC) map published previously [
23]. In addition, this modified engine was equipped with the CVT mechanism to offer a range of speed reduction ratios from 1.3 to 1.8.
Therefore, the power system of the HEM employed an 8.8 kW ICE and a 3-kW integrated motor/generator. In order to balance the torques between the engine and integrated motor/generator, a set of epicyclic gear train decelerators with a speed reduction ratio of 2.3 were designed and directly connected to the motor axle.
2.2. Power Mode Switching Control Strategy in the Hybrid Electric Motorcycle
Based on the energy management strategy, the HEM has three modes: motor drive mode, ICE drive/generator mode, and dual power drive mode, with different power requirements. The motor drive mode runs at low power, in which the motor alone is used to drive and provide power, which is converted into torque output in two-fold by the inverse differential gear power splitter. The ICE drive/generator mode is used when the driving load exceeds the motor power, in which the ICE is used to drive and optimum performance is maintained by adjusting the generator output according to the driving load. The dual power drive mode is used at high speed or heavy load driving, in which the motor power is added to compensate for the insufficient power output from the ICE, which ran at its best performance. The energy management strategy is depicted in
Figure 3.
Table 4 lists the abbreviations used in the figure. On the other hand, the brake kinetic energy recycling mode is specific for periods without power requirements. In this mode, the brake’s kinetic energy can be recycled to recharge the battery, thus increasing the driving distance.
The efficiency of ICEs is poor when the vehicle just starts and is at low-speed cruise. Thus, the proper control strategy was to use electricity for the motor drive mode under the speed of 25 km/h. Such a strategy avoids the low-efficiency range of ICEs, achieves the idle-stop objective, and reduces fuel consumption and exhaust emission. However, when the power requirement is higher than the maximum power output of the motor (6000 rpm) and the SOC of the battery is under the lowest limitation (250 mAh), the ICE takes over the power output. After the ICE acted, the increasing rotation speed of ICE gradually approaches stabilization at 6000 rpm, coinciding with the motor rotation speed decreasing.
As the rotation speed of the motor approaches 0 rpm, the motor may switch to the generator mode. The switch can adjust the torque loading so that the ICE can be maintained at the optimal operating range. The ICE drive/generator mode is required while the SOC is under the lowest limitation. The ICE provides power for driving, as well as when the motor runs as a generator and reverses excess kinetic energy to electrical power to batteries. In contrast, when the ICE cannot satisfy the driver’s power needs (11.76 N-m) and the SOC is higher than the lowest limitation, the motor can switch to drive, and the vehicle can enter to the dual power mode.
In an extremely high-power requirement, the maximum power output of ICE is insufficient. The powers of the motor and the ICE can be combined as the dual power mode. The use of the inverse differential gear power splitter can integrate the two powers to achieve dual power output. The motor and the ICE can be maintained in the maximum torque rotation speed range. However, the torque of the two power sources must be on the same level to achieve torque balance. Once the torques from two power sources largely differ, the dual power mode cannot efficiently integrate the power sources. Our practical test revealed that the ICE was maintained at 6000–7000 rpm as the maximum torque value approximately 13 N-m. When the motor was at 2000–6000 rpm, the maximum torque value was higher than 5.6 N-m. After the torque power passed through the epicyclic gear train decelerator, the motor’s torque was magnified to 2.3 times and the maximum torque value exceeded 12.9 N-m. The output powers of ICE and the motor operated in this range can be stably integrated.
While under no power requirement, the system will enter to the brake kinetic energy recycling mode. During brake kinetic energy recycling, electricity is produced. The vehicle’s kinetic energy is converted into electrical power and charged to the battery.
2.3. Experimental Equipment
The overall experimental processes were designed and monitored using LabVIEW (LabVIEW NXG, National Instruments Co., Austin, TX, US). The specifications for simulation are listed in
Table 5. A chassis power gauge (CycleDyn, SuperFlow Dynamometers & Flowbenches, Sussex, WI, US) was built-in a 460 V 200 A 75 HP AC motor module roller testing platform. An automotive emission analyzer (MEXA-584L, HORIBA Ltd., Kyoto, Japan) was utilized for measuring the exhaust/pollution emissions, including CO, HC, and CO
2. For motor power consumption, a current transducer (HAC 200-S, LEM International SA, Plan les Ouates, Switzerland) was used to measure current signals.
2.4. Test Standards and Specifications
This experiment generally followed the Taiwan E-scooter Standard (TES) [
24] and Chinese National Standards (CNS) [
25] motorcycle performance testing specifications. The test motorcycle was placed on the chassis power gauge experiment platform to test its acceleration performance and maximum speed. The TES-0A-03-01 regulation was followed for acceleration performance, while TES-0A-02-01 was followed for measuring maximum speed. In order to evaluate the energy consumption of the motorcycles in this study, the CNS 3105:D3029 regulation for Class A motorcycle was followed (
Table 6). In this case, the ECE-40 city driving mode was used (
Figure 4).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}