New Trajectory Tracking Approach for a Quadcopter Using Genetic Algorithm and Reference Model Methods


Abstract
:1. Introduction
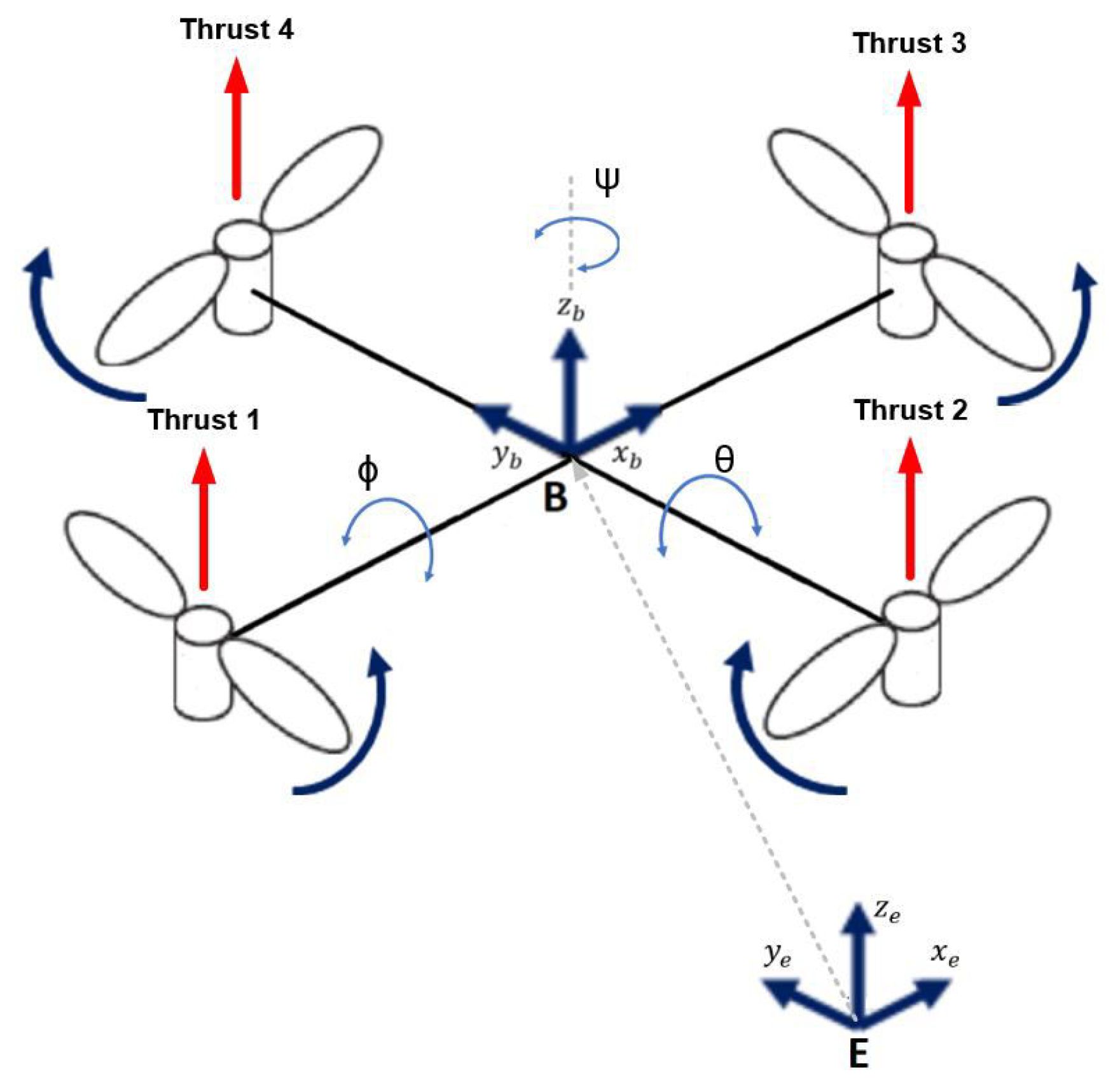
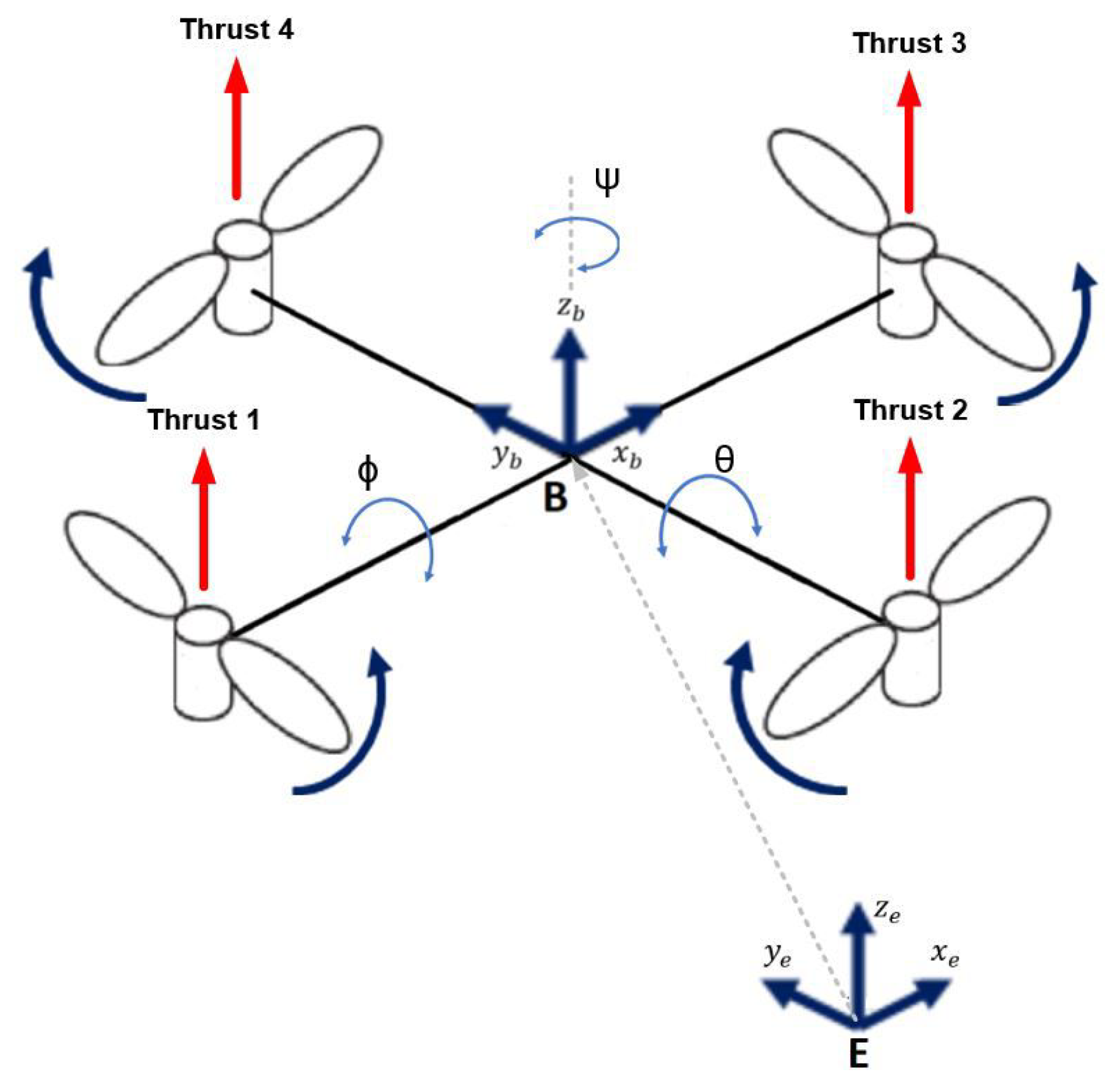
2. Quadcopter Mathematical Model
- The quadcopter structure is rigid and symmetrical;
- The center of gravity lies at the origin of the body reference frame;
- Wind, ground effect disturbances, and the gyroscopic effect are neglected;
- The thrust and drag are proportional to the square of the speed of the rotor.
3. Hierarchical Controllers for Trajectory Tracking
3.1. Reference Model-Based Hierarchical Controller (RMHC)
3.2. Genetic Algorithm-Based Hierarchical Controller (GAHC)
- For attitude
- For position:
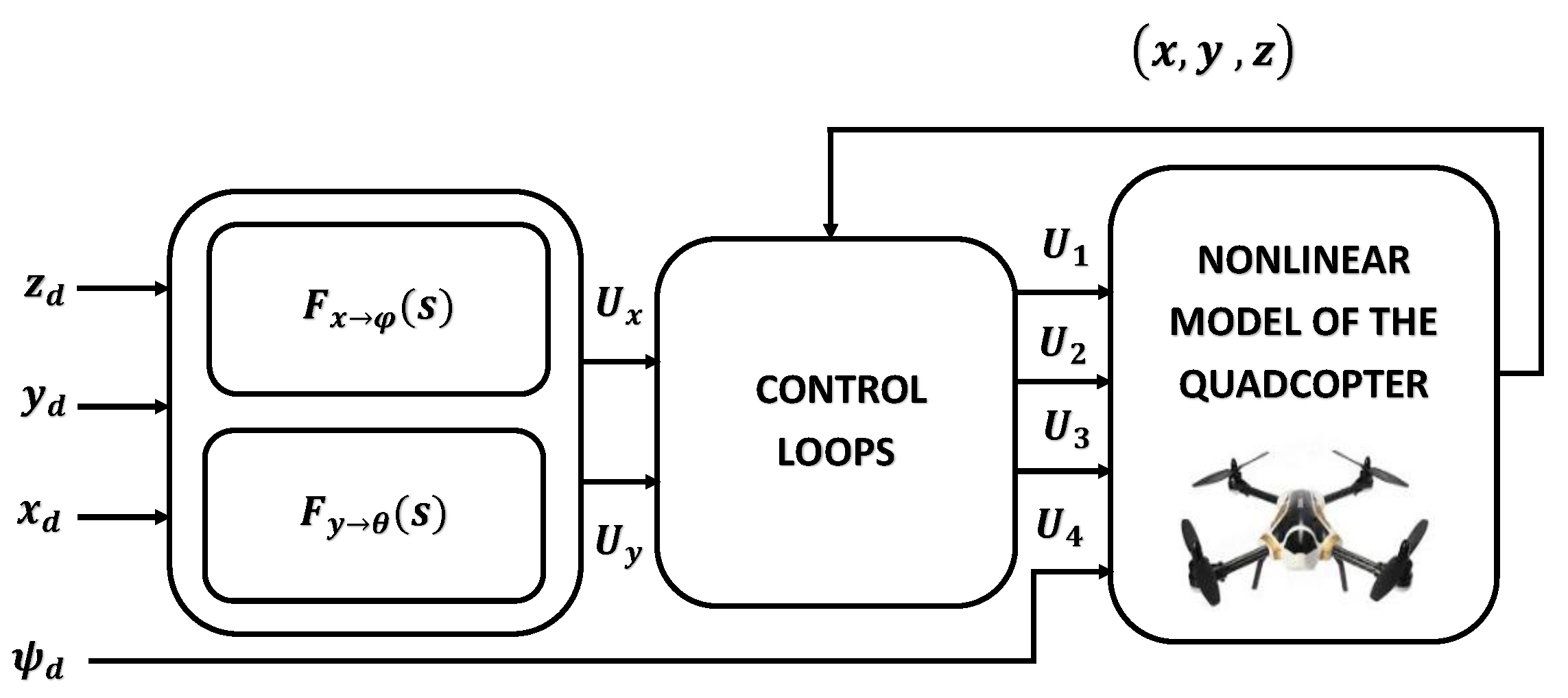
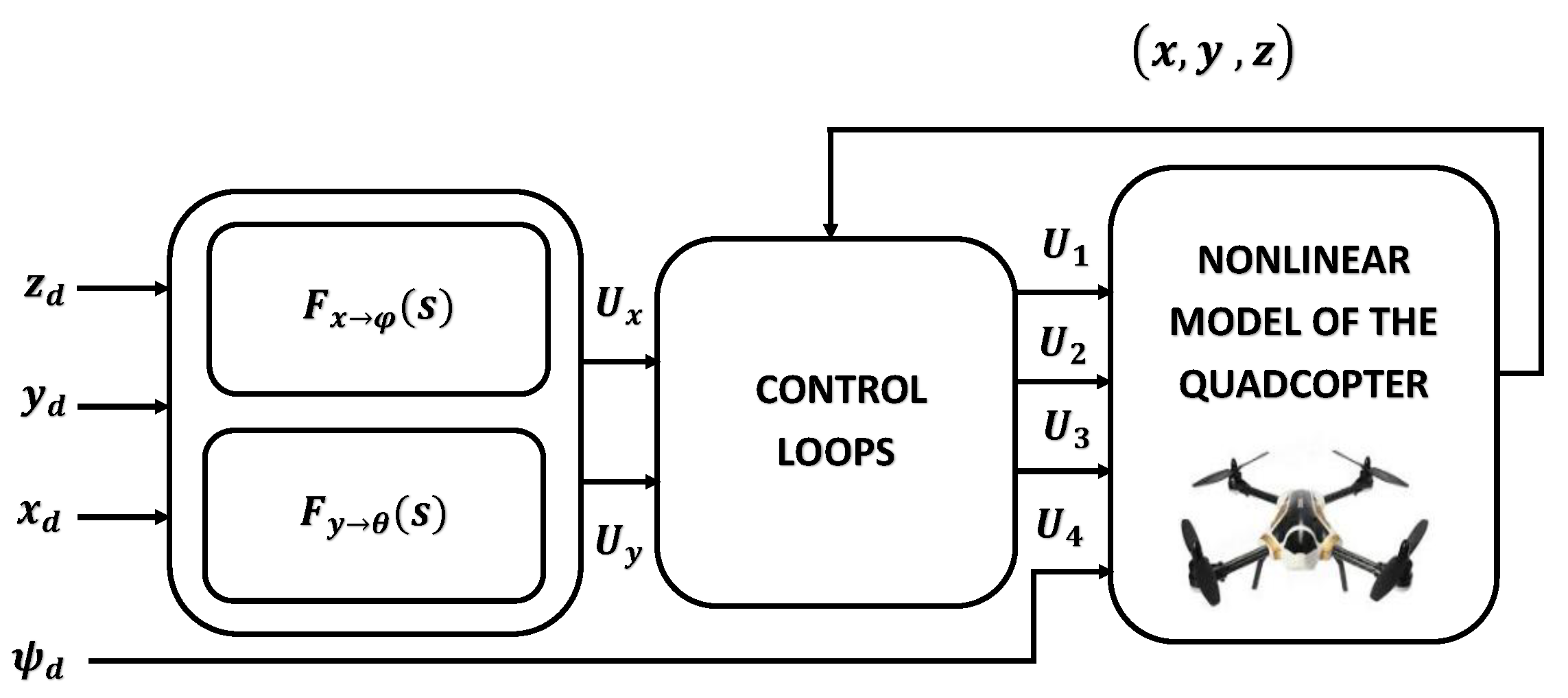
4. Trajectory Tracking via Attitude Stabilization
4.1. Trajectory Tracking Using the Reference Model Method (TTRM)
4.2. Trajectory Tracking Using Genetic Algorithms Method (TTGA)
5. Simulation Results
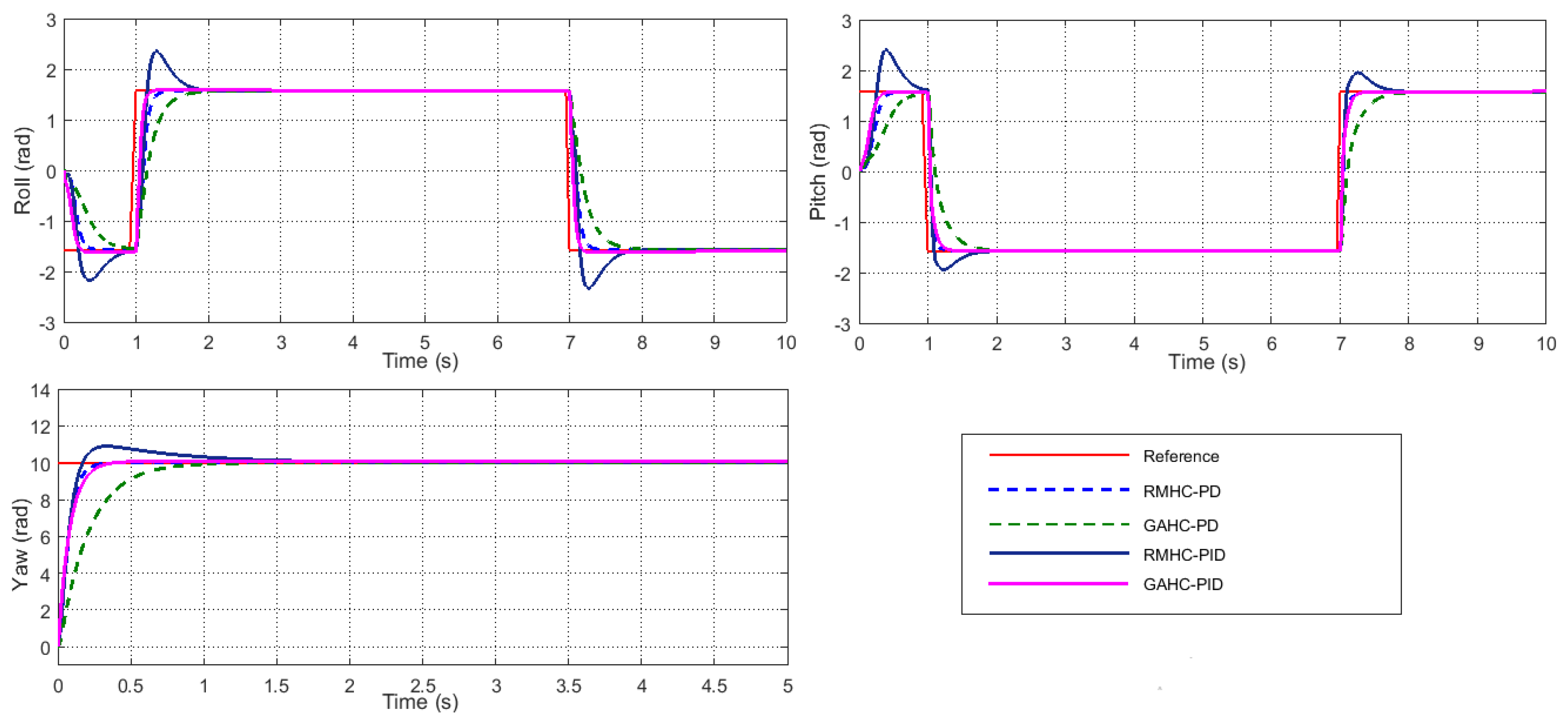
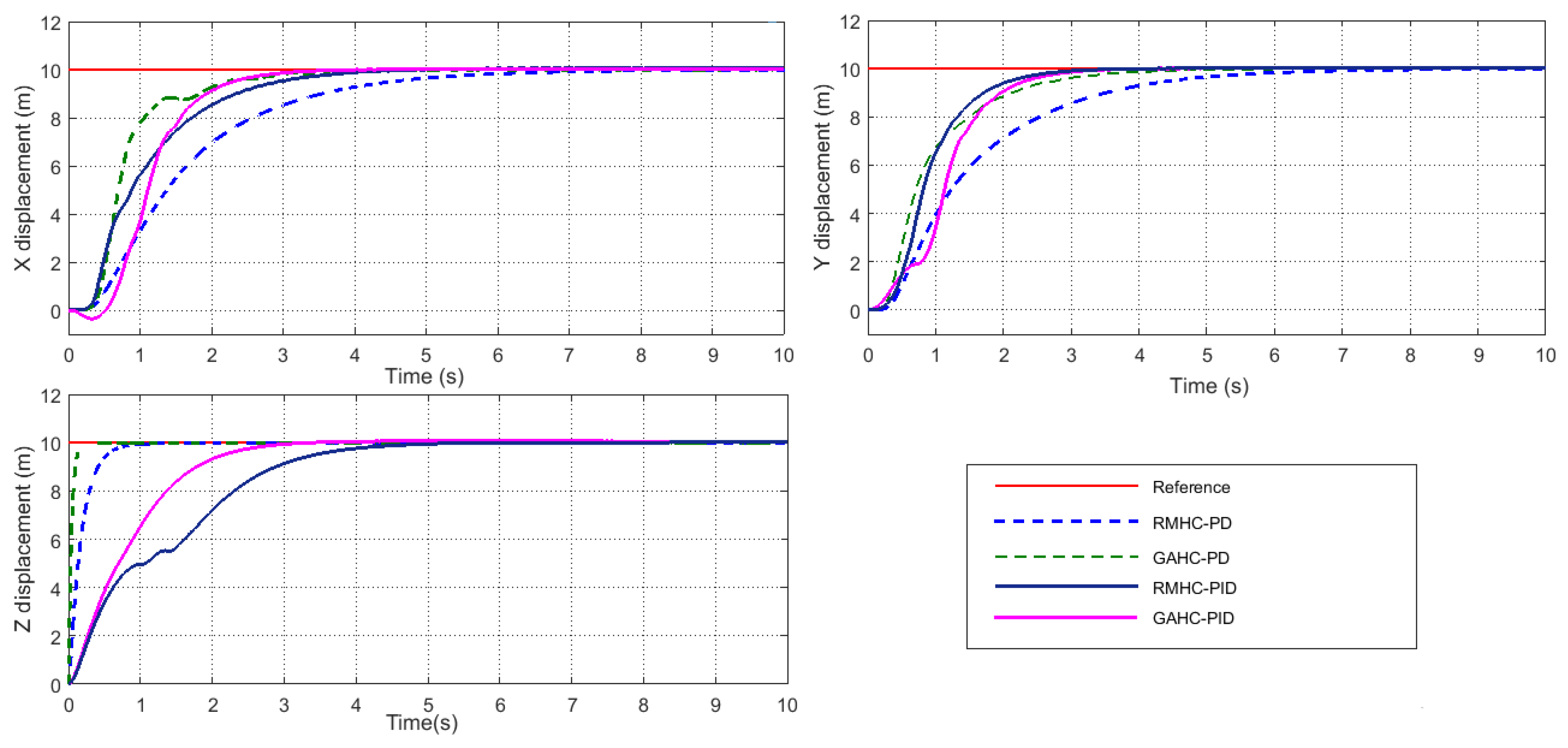
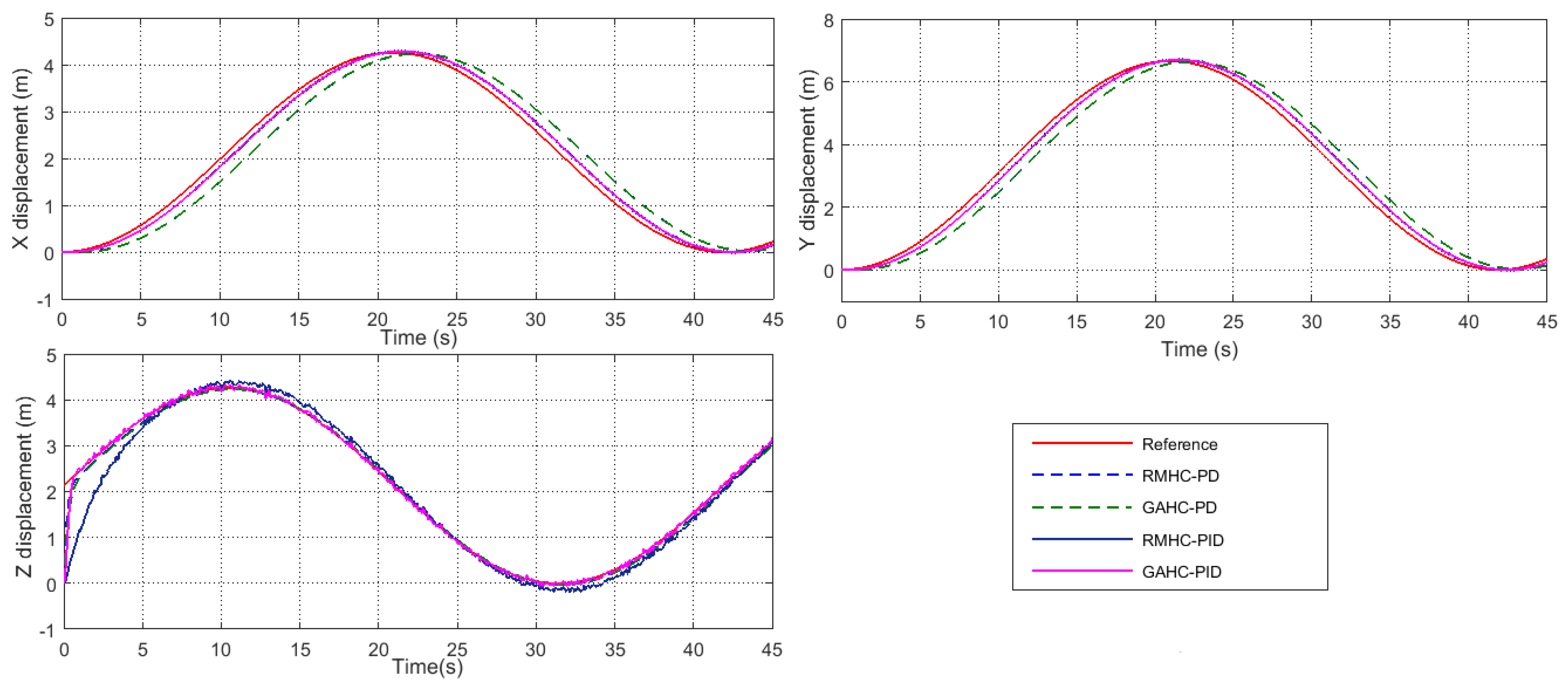
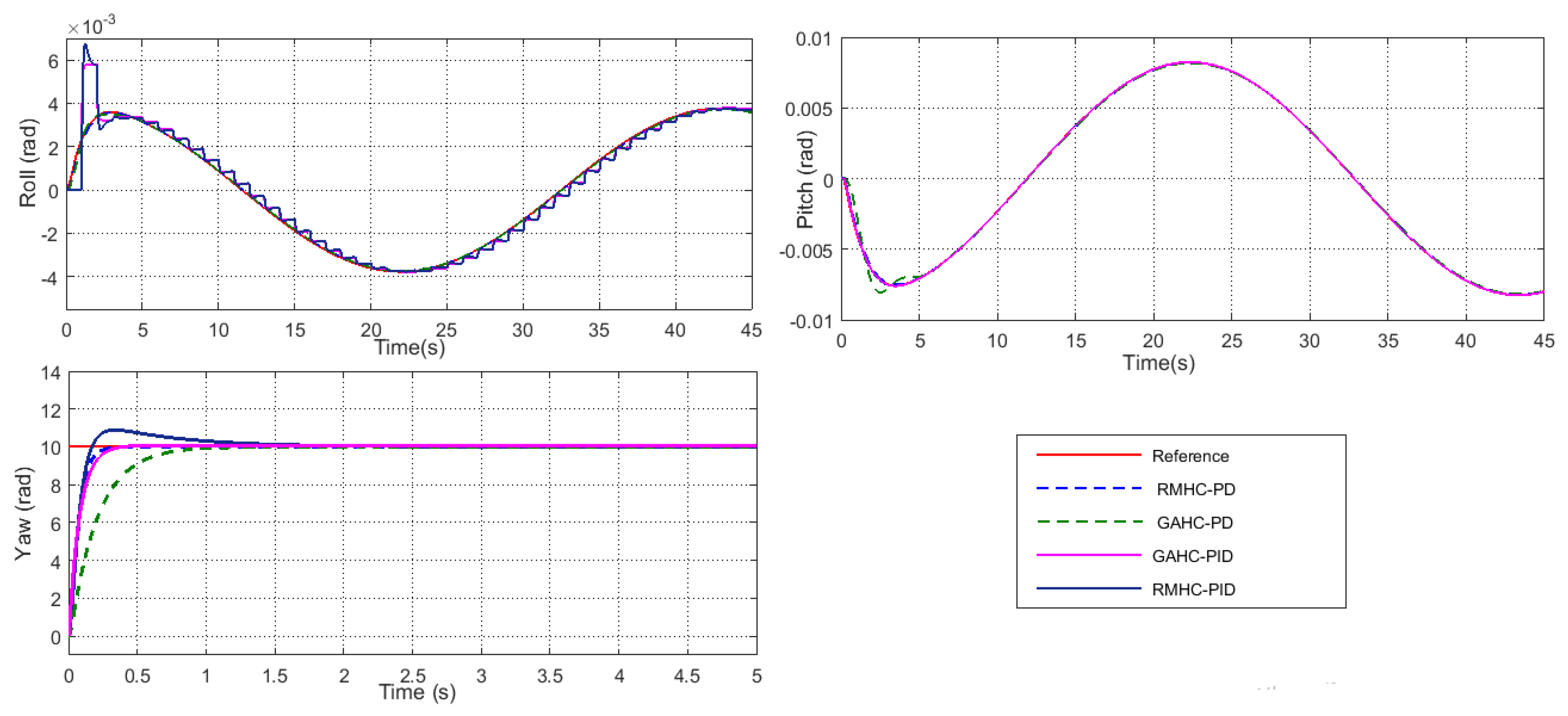
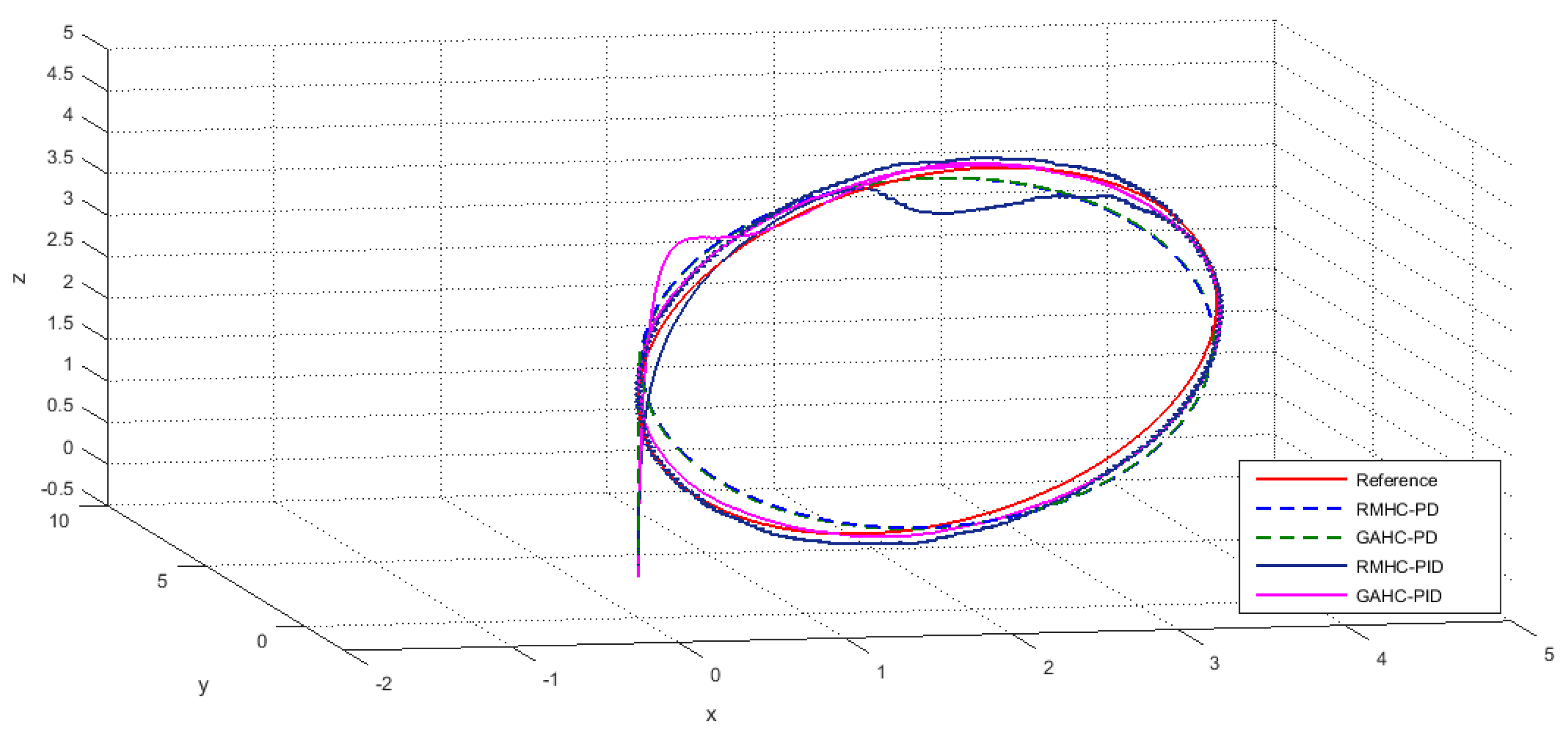
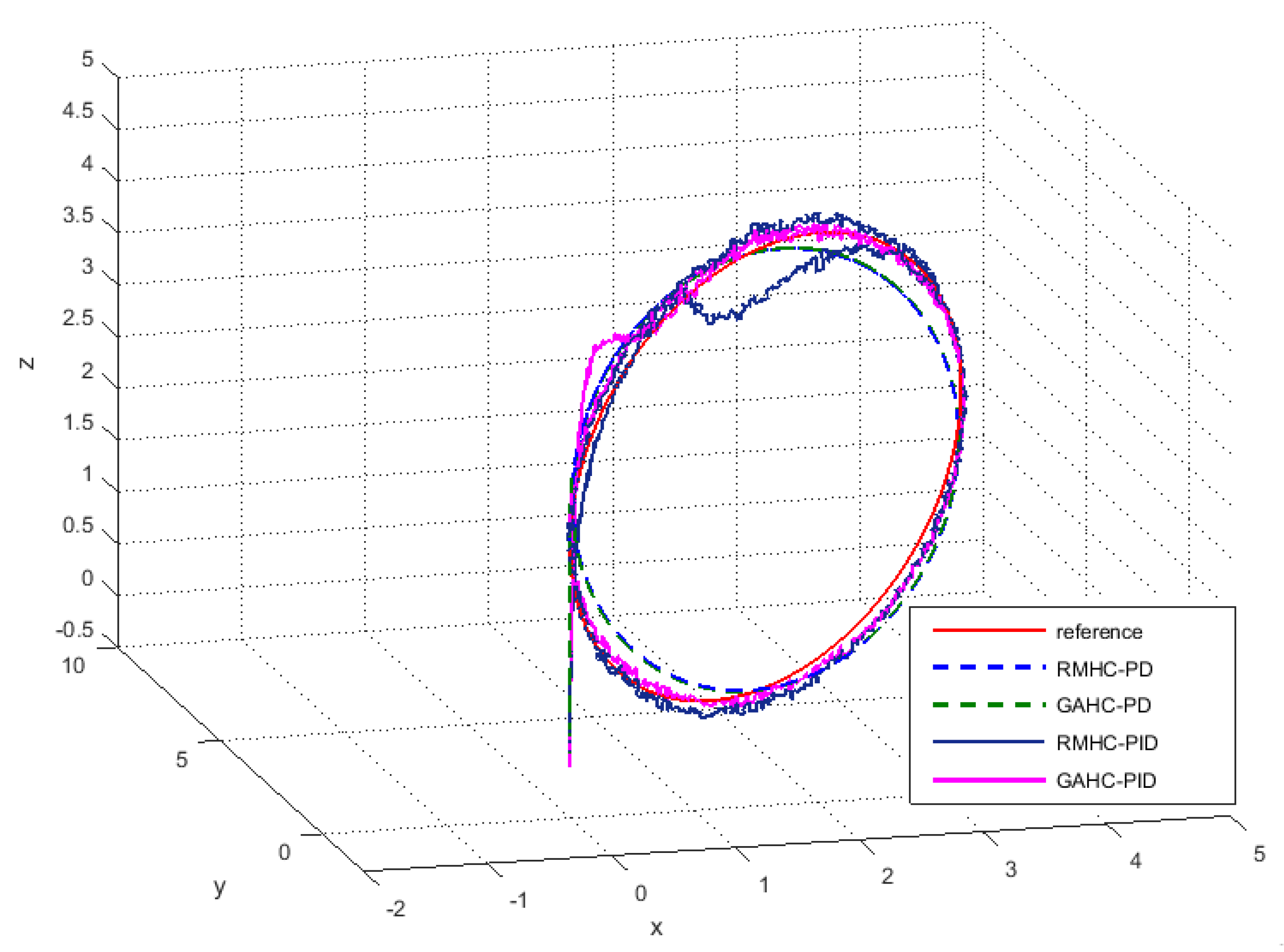
5.1. Hierarchical Controllers for Trajectory Tracking
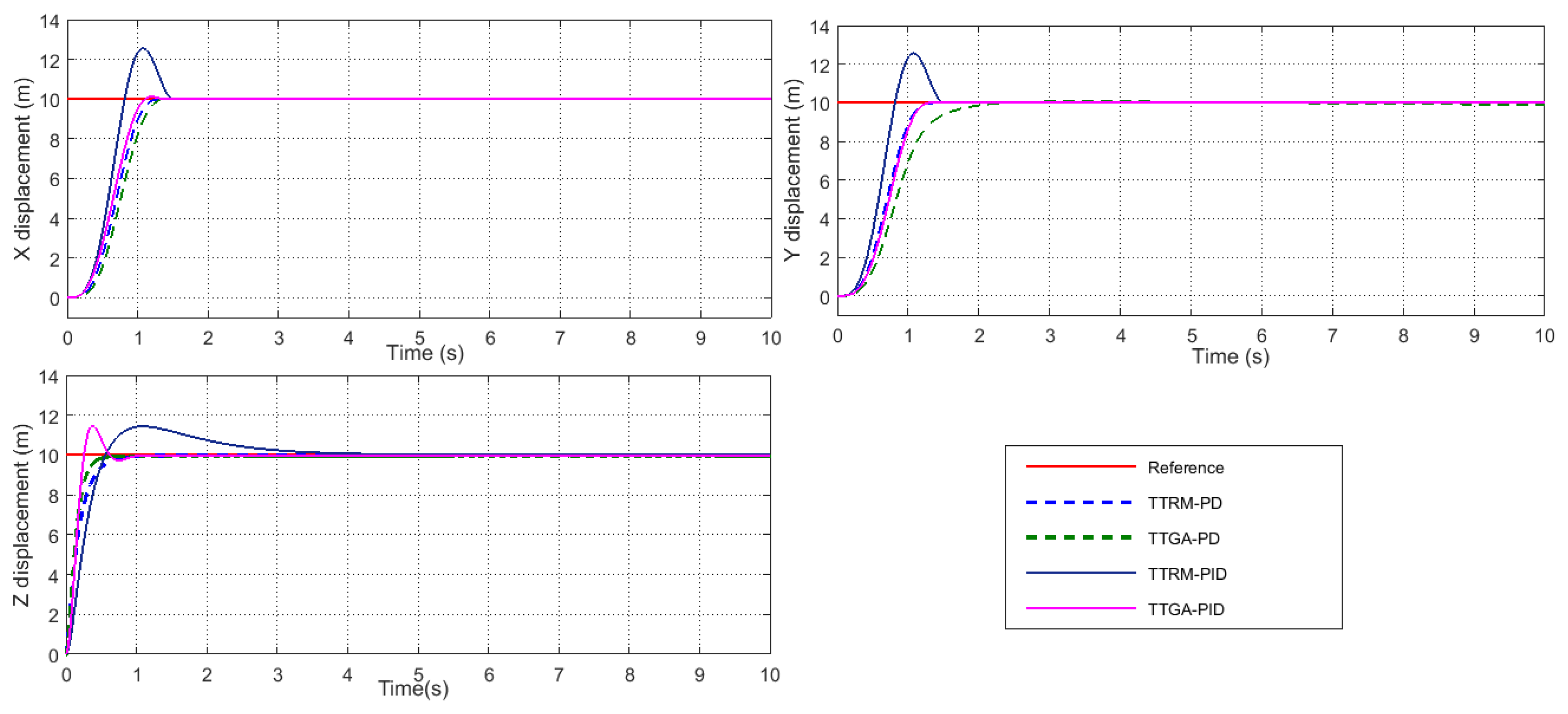
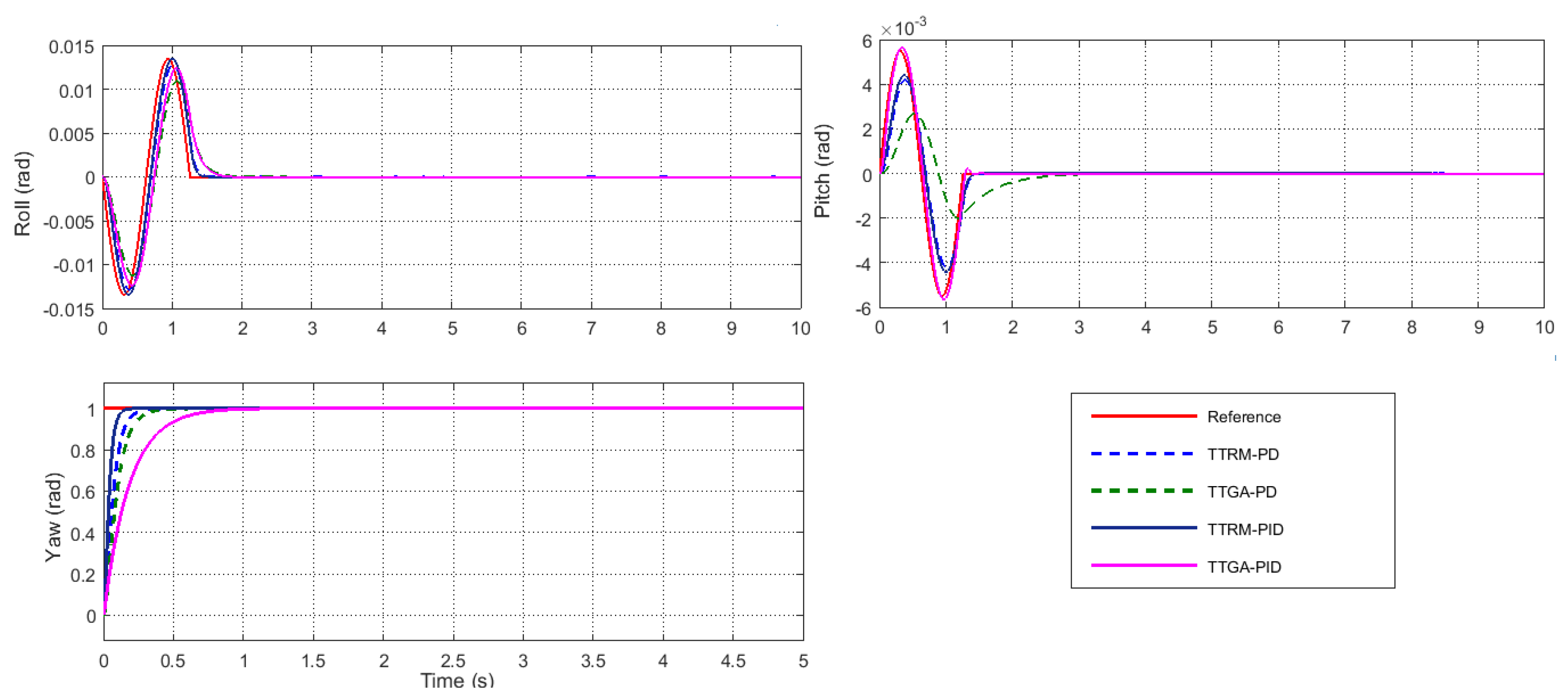
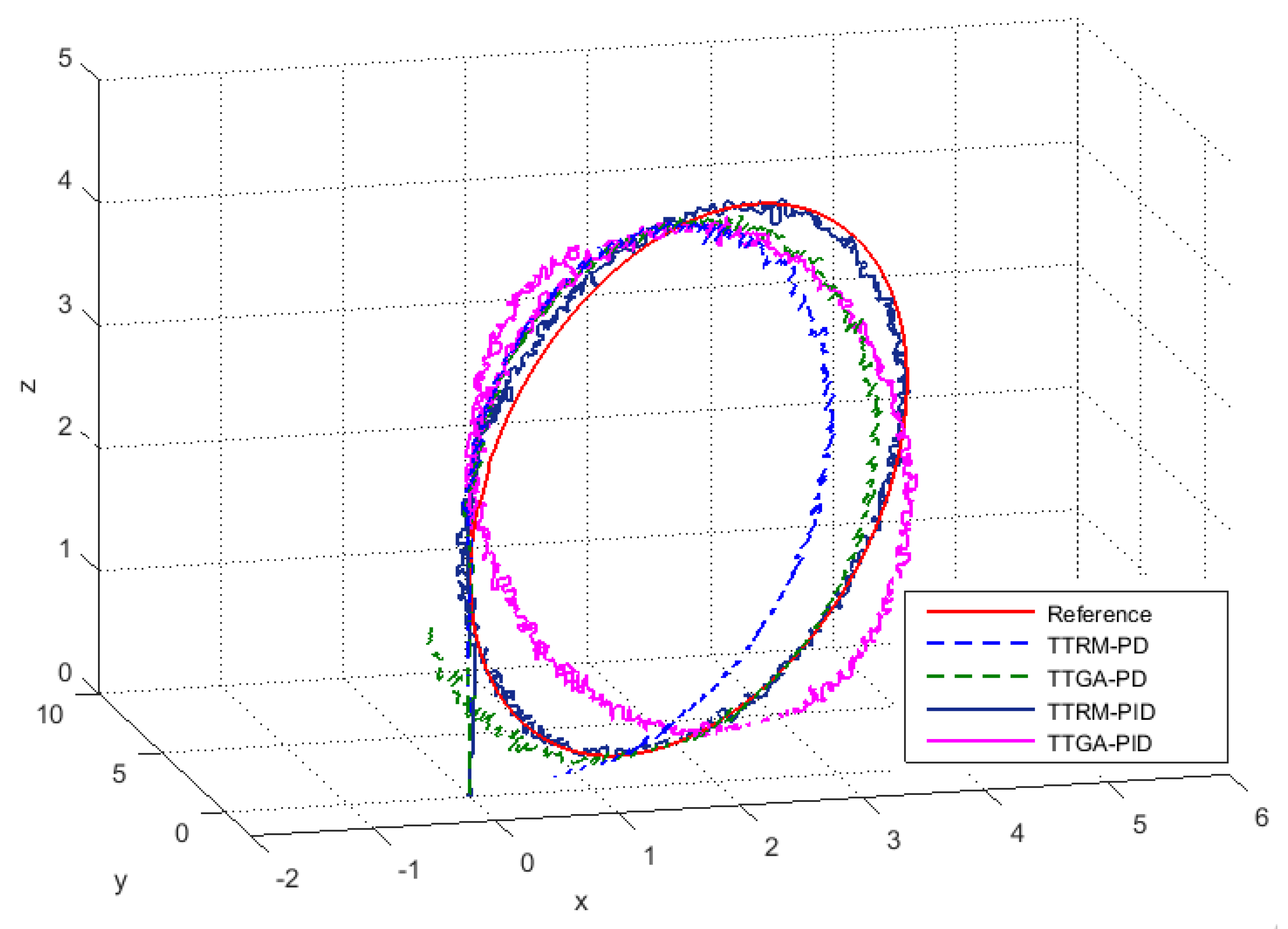
5.2. Trajectory Tracking via Attitude Stabilization
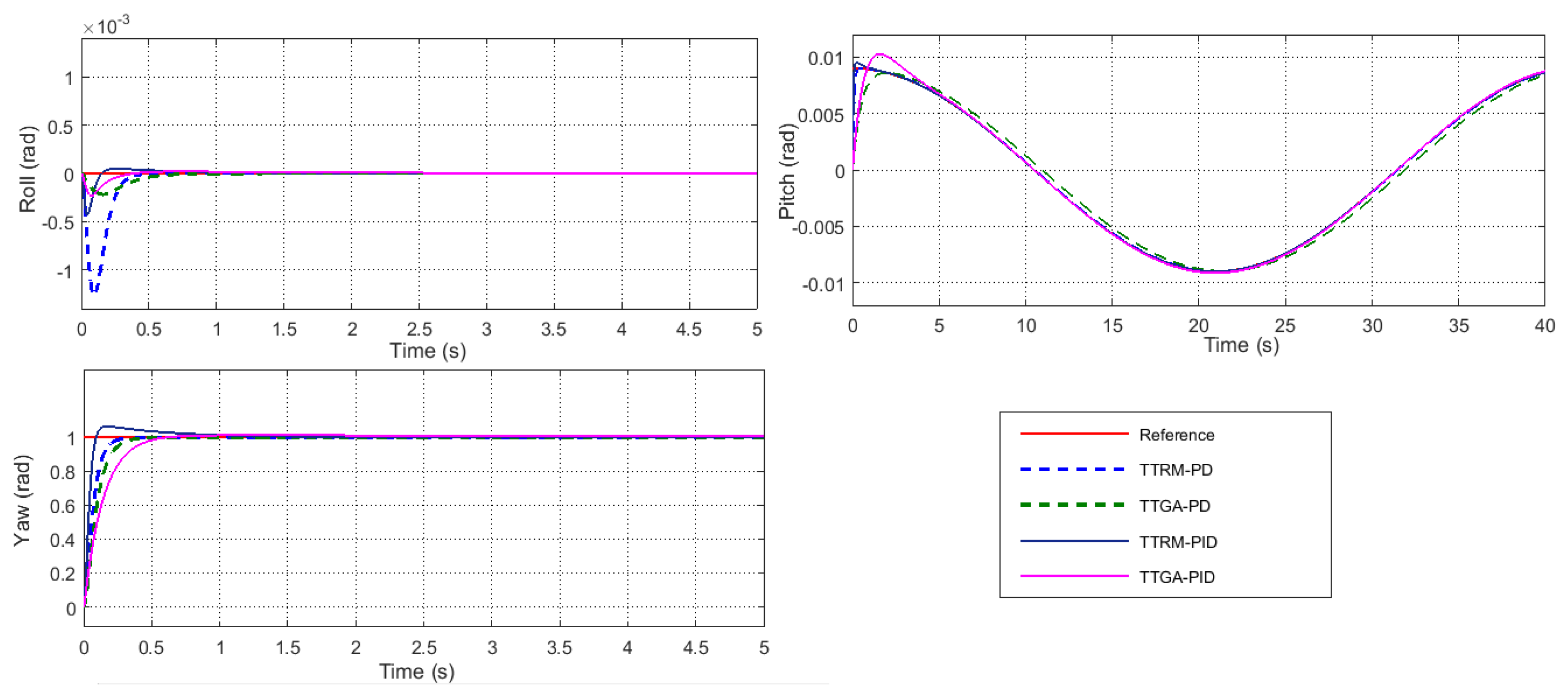
5.3. Trajectory Tracking in the Presence of Disturbance
5.3.1. Hierarchical Controllers
5.3.2. Trajectory Tracking via Attitude Stabilization
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| PD | Proportional, Derivative |
| PID | Proportional, Integral, Derivative |
| GA | Genetic Algorithm |
| RM | Reference Model |
| RMHC | Reference Model besed Hierarchical Controller |
| GAHC | Genetic Algorithm besed Hierarchical Controller |
| TTRM | Trajectory Tracking by using Reference Model |
| TTGA | Trajectory Tracking by using Genetic Algorithm |
References
- Zhang, Y.; Kondak, K.; Lu, T.; Du, J.; Bernard, M.; Wang, G. Development of the model and hierarchy controller of the quad-copter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 1–12. [Google Scholar] [CrossRef]
- Mercado, D.; Castillo, P.; Castro, R.; Lozano, R. 2-Sliding Mode Trajectory Tracking Control and EKF Estimation for Quadrotors. IFAC Proc. Vol. 2014, 47, 8849–8854. [Google Scholar] [CrossRef]
- Zou, Y. Nonlinear robust adaptive hierarchical sliding mode control approach for quadrotors. Int. J. Robust Nonlinear Control 2017, 27, 925–941. [Google Scholar] [CrossRef]
- Wang, L.; Jia, H. The trajectory tracking problem of quadrotor UAV: Global stability analysis and control design based on the cascade theory. Asian J. Control 2014, 16, 574–588. [Google Scholar] [CrossRef]
- Cabecinhas, D.; Cunha, R.; Silvestre, C. A nonlinear quadrotor trajectory tracking controller with disturbance rejection. Control Eng. Pract. 2014, 26, 1–10. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.Y.; Zhu, X.; Ding, H. High-performance trajectory tracking control of a quadrotor with disturbance observer. Sens. Actuators A 2014, 211, 67–77. [Google Scholar] [CrossRef]
- Sun, L.; Zuo, Z. Nonlinear adaptive trajectory tracking control for a quad-rotor with parametric uncertainty. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1709–1721. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, C. Adaptive trajectory tracking control of output constrained multi-rotors systems. IET Control Theory Appl. 2014, 8, 1163–1174. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs. Appl. Sci. 2018, 8, 1893. [Google Scholar] [CrossRef]
- Khebbache, H.; Tadjine, M. Robust fuzzy backstepping sliding mode controller for a quadrotor unmanned erial vehicle. J. Control Eng. Appl. Inform. 2013, 15, 3–11. [Google Scholar]
- Khalili, B.; Rezaei, M. Trajectory tracking control of a quadrotor via fuzzy terminal sliding mode controller in the presence of uncertainty. Bull. Soc. R. Sci. Liege 2016, 85, 227–237. [Google Scholar]
- Nafia, N.; El Kari, A.; Ayad, H.; Mjahed, M. Robust Full Tracking Control Design of Disturbed Quadrotor UAVs with Unknown Dynamics. Aerospace 2018, 5, 115. [Google Scholar] [CrossRef]
- Su, X.; Wu, Y.; Song, J.; Yuan, P. A Fuzzy Path Selection Strategy for Aircraft Landing on a Carrier. Appl. Sci. 2018, 8, 779. [Google Scholar] [CrossRef]
- Chen, Y.M.; He, Y.L.; Zhou, M.F. Decentralized PID neural network control for a quadrotor helicopter subjected to wind disturbance. J. Cent. South Univ. 2015, 22, 168–179. [Google Scholar] [CrossRef]
- El Hamidi, K.; Mjahed, M.; El Kari, A.; Ayad, H. Neural and Fuzzy Based Nonlinear Flight Control for an Unmanned Quadcopter. Int. Rev. Autom. Control (IREACO) 2018, 11, 98–106. [Google Scholar] [CrossRef]
- Estevez, J.; Graña, M. Robust Control Tuning by PSO of Aerial Robots Hose Transportation; LNCS Springer: Cham, Switzerland, 2015; Volume 9108, pp. 291–300. [Google Scholar]
- El Gmili, N.; Mjahed, M.; El Kari, A.; Ayad, H. An Improved Particle Swarm Optimization (IPSO) Approach for Identification and Control of Stable and Unstable Systems. Int. Rev. Autom. Control (IREACO) 2017, 10, 229–239. [Google Scholar] [CrossRef]
- Tran, H.-K.; Chiou, J.-S. PSO-Based Algorithm Applied to Quadcopter Micro Air Vehicle Controller Design. Micromachines 2016, 7, 168. [Google Scholar] [CrossRef] [PubMed]
- Siti, I.; Mjahed, M.; Ayad, H.; El Kari, A. New Designing Approaches for Quadcopter PID Controllers Using Reference Model and Genetic Algorithm Techniques. Int. Rev. Autom. Control (IREACO) 2017, 10, 240–248. [Google Scholar] [CrossRef]
- Wilburn, K.B.; Perhinschi, G.M.; Wilburn, N.J. A modified genetic algorithm for UAV trajectory tracking control laws optimization. Int. J. Intell. Unmanned Syst. 2014, 2, 58–90. [Google Scholar] [CrossRef]
- Castillo, P.; Dzul, A.; Lozano, R. Real-time stabilization and tracking of a four rotor mini-rotorcraft. IEEE Trans. Control Syst. Technol. 2003, 12, 3123–3128. [Google Scholar]
- Basri, M.A.; Husain, A.R.; Danapalasingam, K.A. Backstepping controller with intelligent parameters selection for stabilization of quadrotor helicopter. J. Eng. Sci. Technol. Rev. 2014, 7, 66–74. [Google Scholar] [CrossRef]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive quadrotor control: Attitude, altitude and position experimental studies. IET Control Theory A 2012, 6, 1812–1827. [Google Scholar] [CrossRef]
- Efe, M. Neural Network Assisted Computationally Simple PI λ D μ Control of a Quadrotor UAV. IEEE Trans. Ind. Inf. 2011, 7, 354–361. [Google Scholar] [CrossRef]
- Xu, R.; Özgüner, Ü. Sliding mode control of a class of underactuated systems. Automatica 2008, 44, 233–241. [Google Scholar] [CrossRef]
- Smith, C.A.; Corripio, A.B. Principles and Practice of Automatic Process Control; Wiley: New York, NY, USA, 1985; Volume 2. [Google Scholar]
- Bertrand, S.; Guénard, N.; Hamel, T.; Piet-Lahanier, H.; Eck, L. A hierarchical controller for miniature VTOL UAVs: Design and stability analysis using singular perturbation theory. Control Eng. Pract. 2011, 19, 1099–1108. [Google Scholar] [CrossRef]
- Mjahed, M. Commande des Systemes; Lectures Notes; Ecole Royale de l’Air: Marrakech, Morocco, 2016. [Google Scholar]
- Mjahed, M. Asservissements Lineaires Continus; Lectures Notes; Ecole Royale de l’Air: Marrakech, Morocco, 2014. [Google Scholar]
- Sa, I.; Corke, P. Vertical infrastructure inspection using a quadcopter and shared autonomy control. In Field and Service Robotics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 219–232. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMHC Method | Controllers | ||||||
|---|---|---|---|---|---|---|---|
| PD Parameters | 16.67 | 16.67 | 16.67 | 0.10 | 0.10 | 190.8 | |
| 1.21 | 1.21 | 1.21 | 0.20 | 0.20 | 34.98 | ||
| PID Parameters | 37.17 | 37.17 | 33.34 | 18.34 | 37.17 | 6.60 | |
| 65.22 | 65.22 | 7.28 | 0.25 | 65.22 | 0.05 | ||
| 2.35 | 2.35 | 1.4 | 10.41 | 2.35 | 6.24 | ||
| GAHC Method | Controllers | ||||||
|---|---|---|---|---|---|---|---|
| PD Parameters | 16.83 | 15.78 | 22.82 | 7.92 | 7.41 | 184.0 | |
| 2.82 | 2.55 | 42.48 | 6.45 | 6.40 | 23.05 | ||
| PID Parameters | 48.63 | 35.83 | 34.18 | 13.34 | 7.61 | 17.67 | |
| 8.45 | 1.36 | 7.57 | 0.16 | 0.92 | 0.10 | ||
| 2.29 | 2.35 | 6.50 | 5.23 | 5.46 | 10.40 | ||
| TTRM Method | Controllers | ||||
|---|---|---|---|---|---|
| PD Parameters | 16.67 | 16.67 | 16.67 | 190.8 | |
| 1.27 | 1.27 | 1.27 | 34.98 | ||
| PID Parameters | 23.48 | 23.48 | 42.38 | 29.01 | |
| 13.58 | 13.58 | 0.81 | 23.58 | ||
| 1.42 | 1.42 | 1.71 | 8.58 | ||
| TTGA Method | Controllers | ||||
|---|---|---|---|---|---|
| PD Parameters | 17.53 | 6.13 | 10.33 | 176.91 | |
| 2.59 | 2.92 | 1.03 | 45.55 | ||
| PID Parameters | 27.73 | 23.92 | 34.18 | 21.85 | |
| 17.86 | 13.52 | 1.71 | 12.51 | ||
| 3.43 | 0.68 | 6.31 | 5.25 | ||
| Parameter (Unit) | Value |
|---|---|
| m (Kg) | 0.53 |
| g (m/s) | 9.81 |
| l (m) | 0.4 |
| b (N/rad/s) | 4.15 × |
| d (N·m/rad/s) | 7.5 × |
| , (Kg·m) | 7.86 × |
| (Kg·m) | 1.173 × |
| (Kg·m) | 2.8385 × |
| , , , (N/rad/s) | 5.567 × |
| (N/rad/s) | 6.354 × |
| (N/rad/s) | 3.354 × |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siti, I.; Mjahed, M.; Ayad, H.; El Kari, A. New Trajectory Tracking Approach for a Quadcopter Using Genetic Algorithm and Reference Model Methods. Appl. Sci. 2019, 9, 1780. https://doi.org/10.3390/app9091780
Siti I, Mjahed M, Ayad H, El Kari A. New Trajectory Tracking Approach for a Quadcopter Using Genetic Algorithm and Reference Model Methods. Applied Sciences. 2019; 9(9):1780. https://doi.org/10.3390/app9091780
Chicago/Turabian StyleSiti, Imane, Mostafa Mjahed, Hassan Ayad, and Abdeljalil El Kari. 2019. "New Trajectory Tracking Approach for a Quadcopter Using Genetic Algorithm and Reference Model Methods" Applied Sciences 9, no. 9: 1780. https://doi.org/10.3390/app9091780
APA StyleSiti, I., Mjahed, M., Ayad, H., & El Kari, A. (2019). New Trajectory Tracking Approach for a Quadcopter Using Genetic Algorithm and Reference Model Methods. Applied Sciences, 9(9), 1780. https://doi.org/10.3390/app9091780