An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators


Abstract
1. Introduction
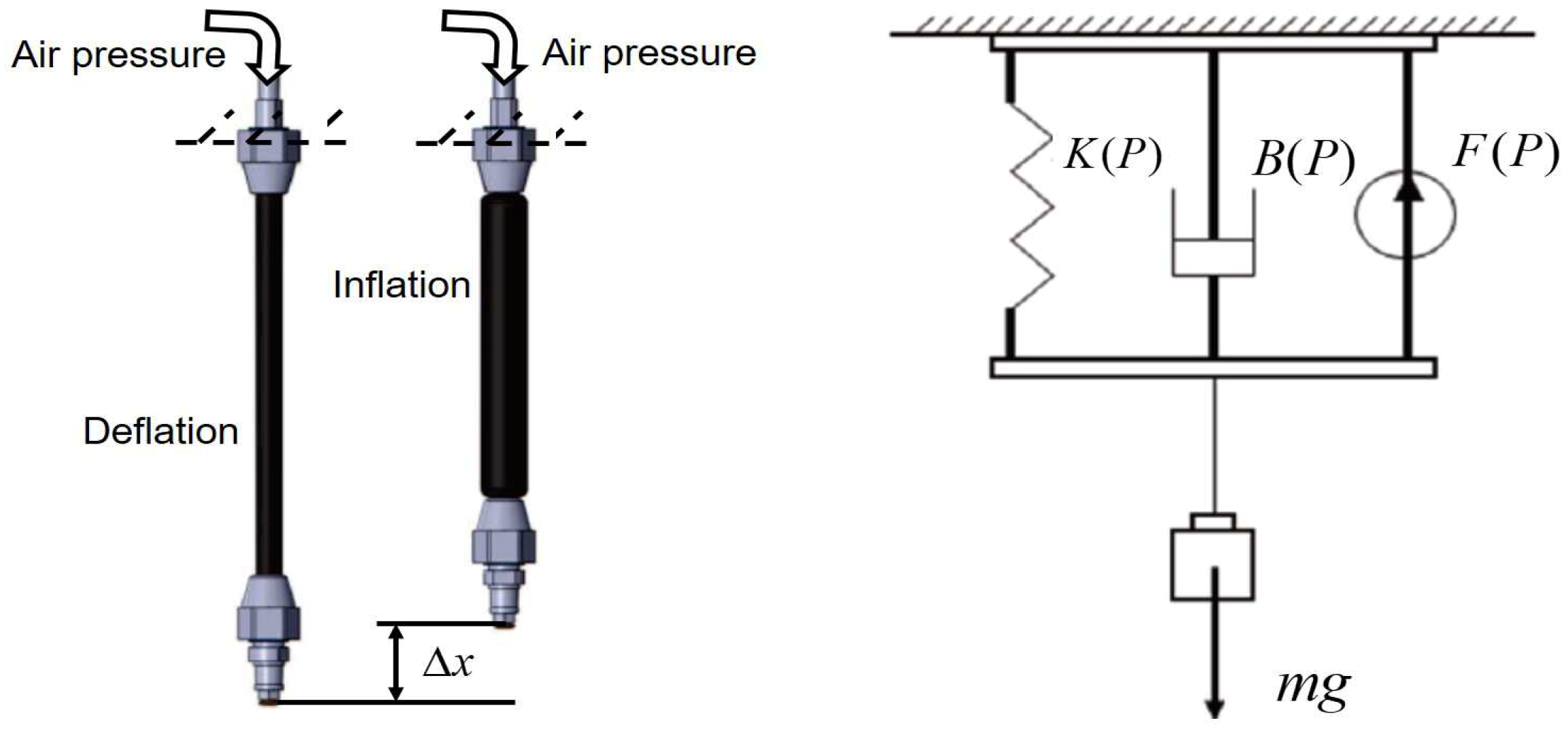
2. Dynamics of PMA
3. Controller Design and Stability Analysis
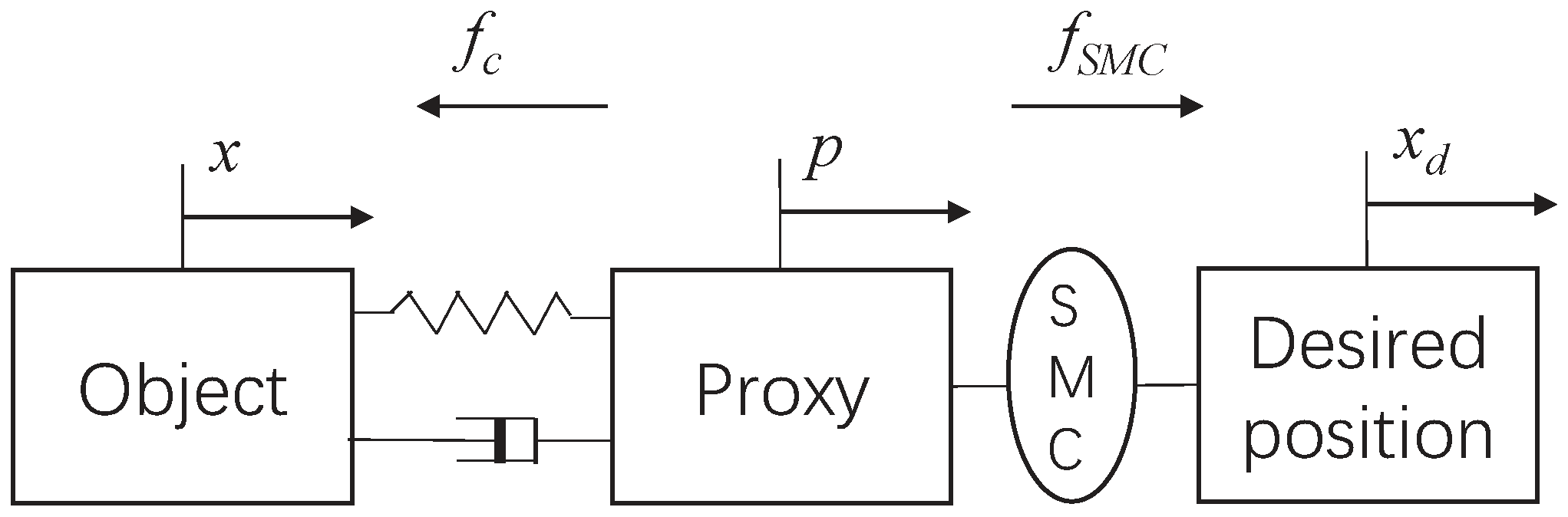
3.1. Extended Proxy-Based SMC Design
3.2. Stability Analysis
4. Experiment Studies
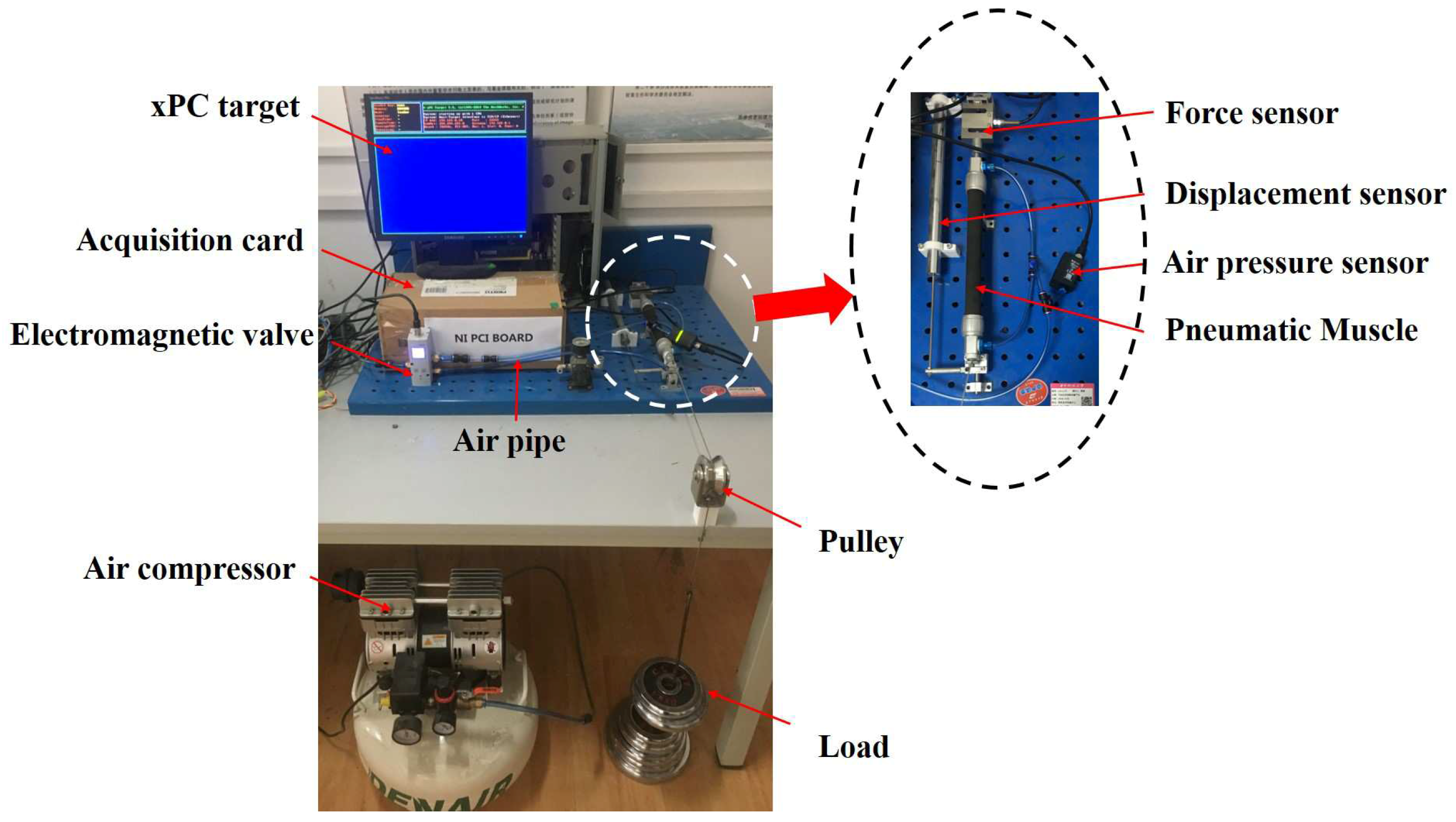
4.1. Experimental Setup
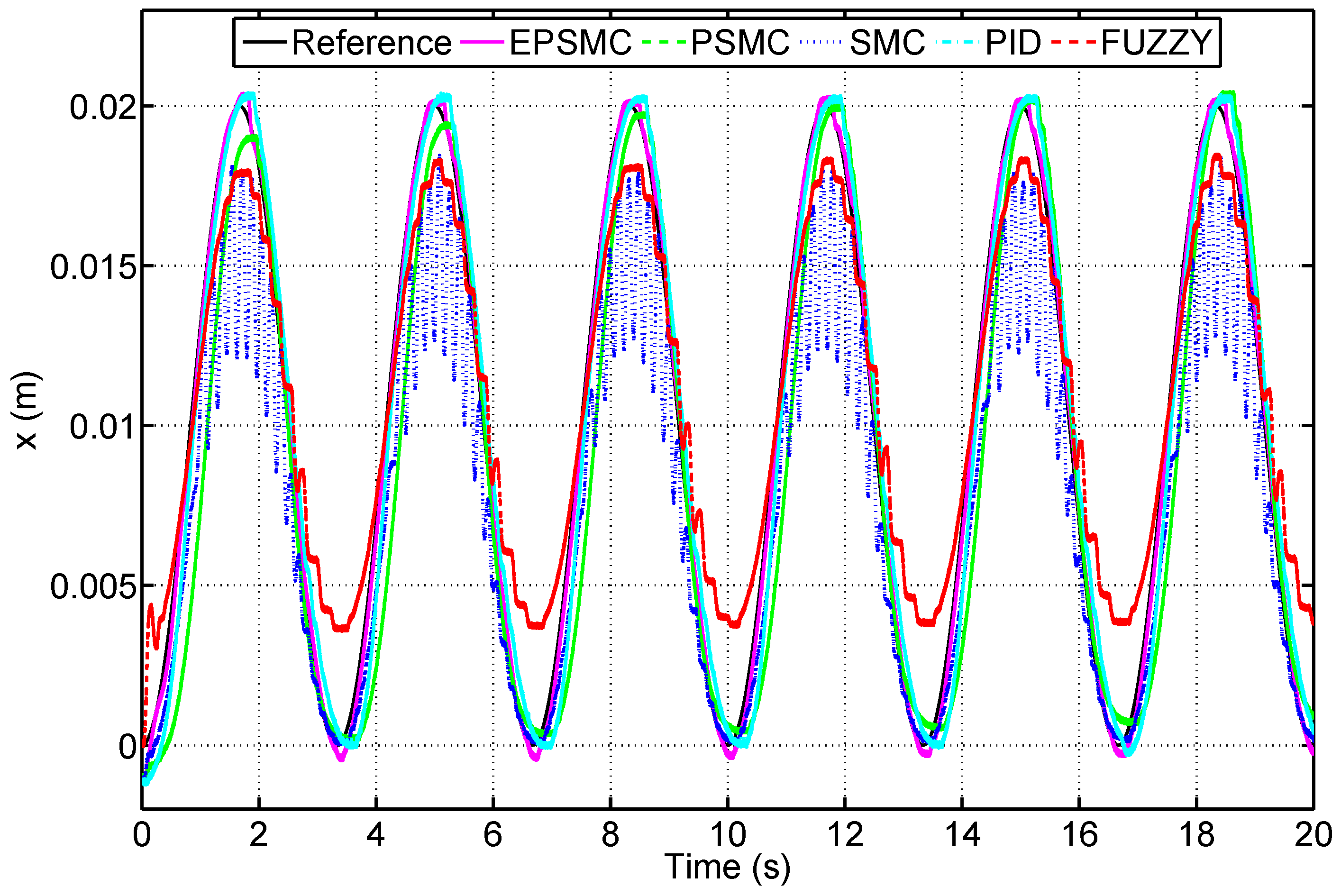
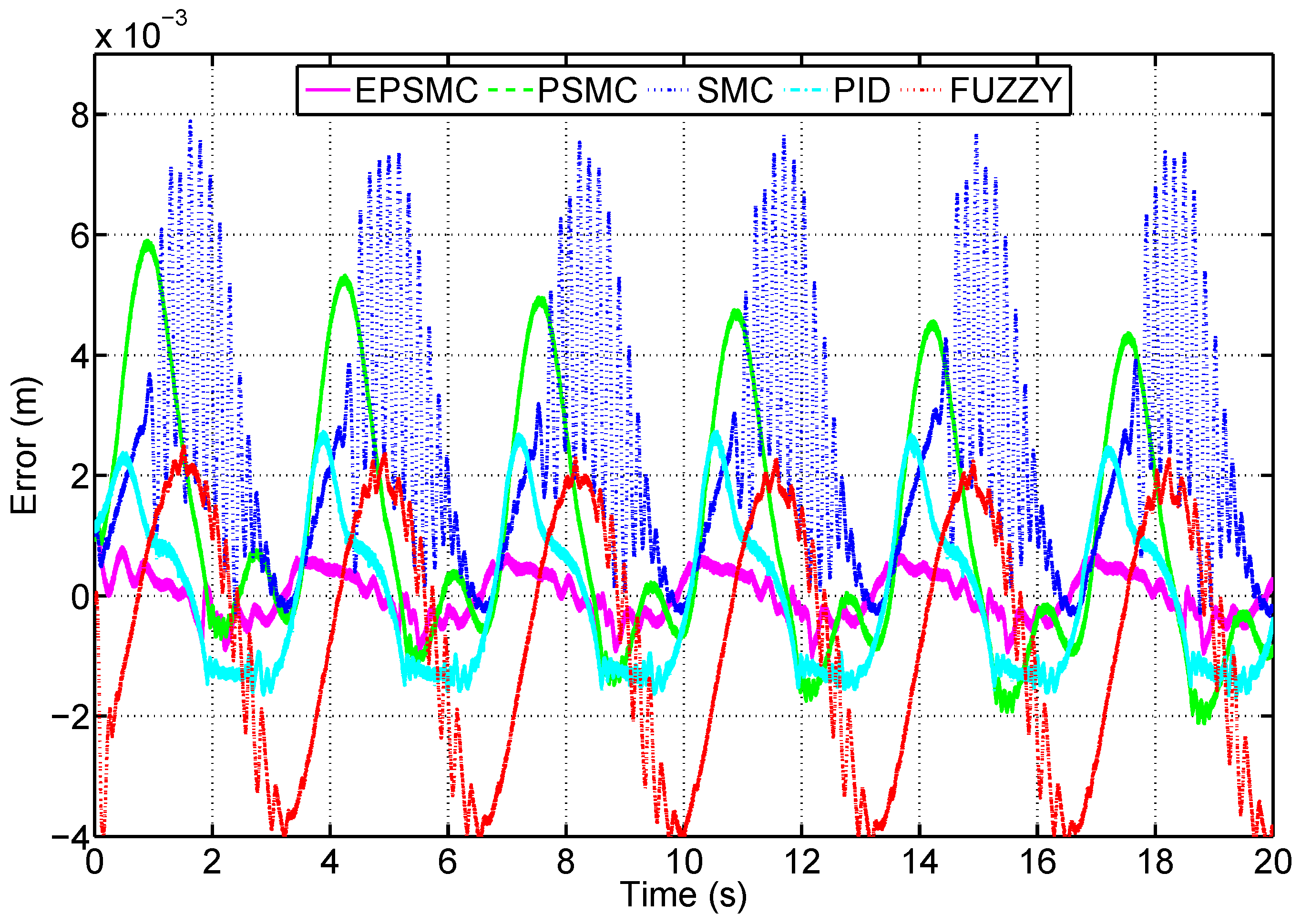
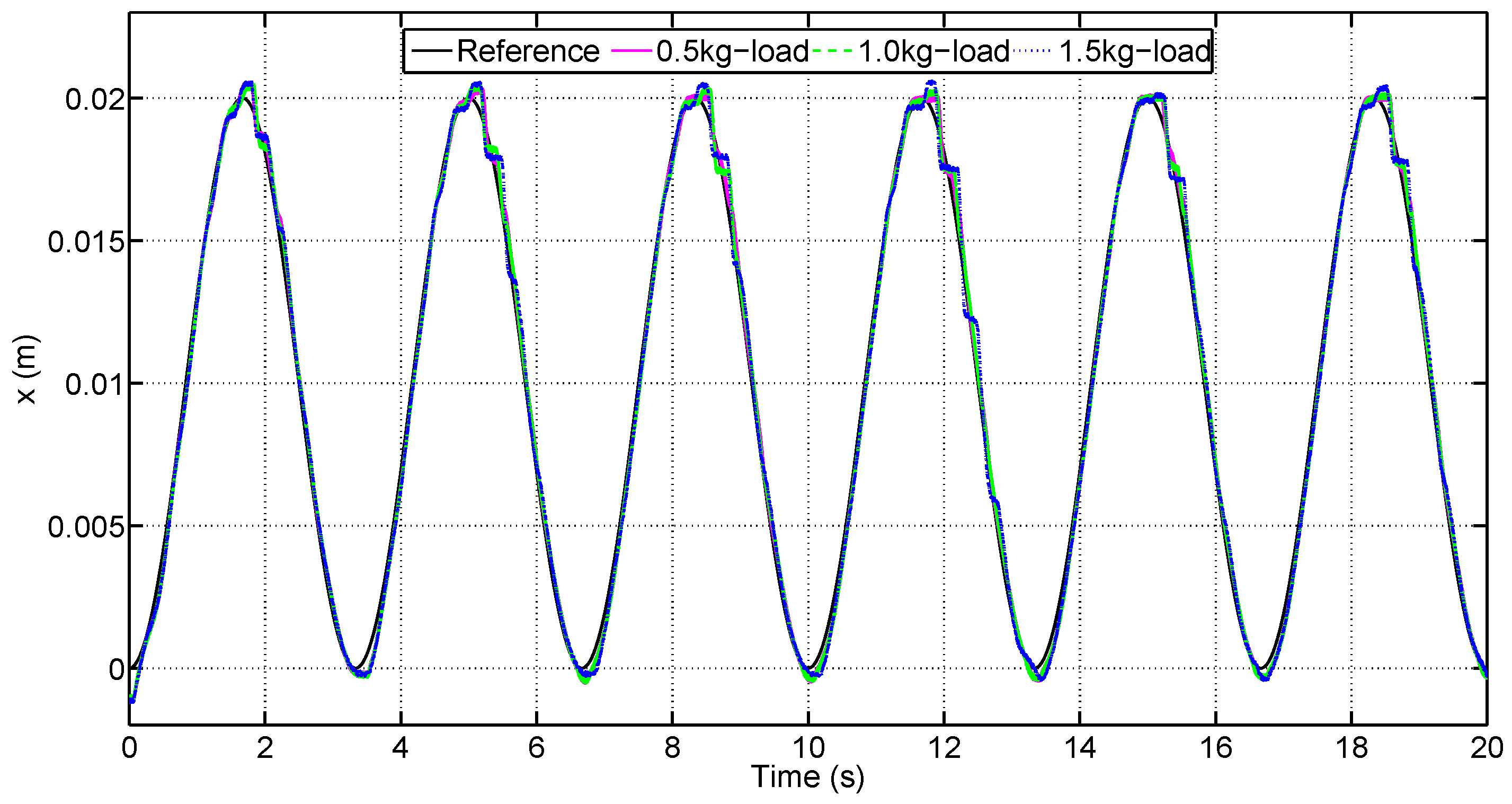
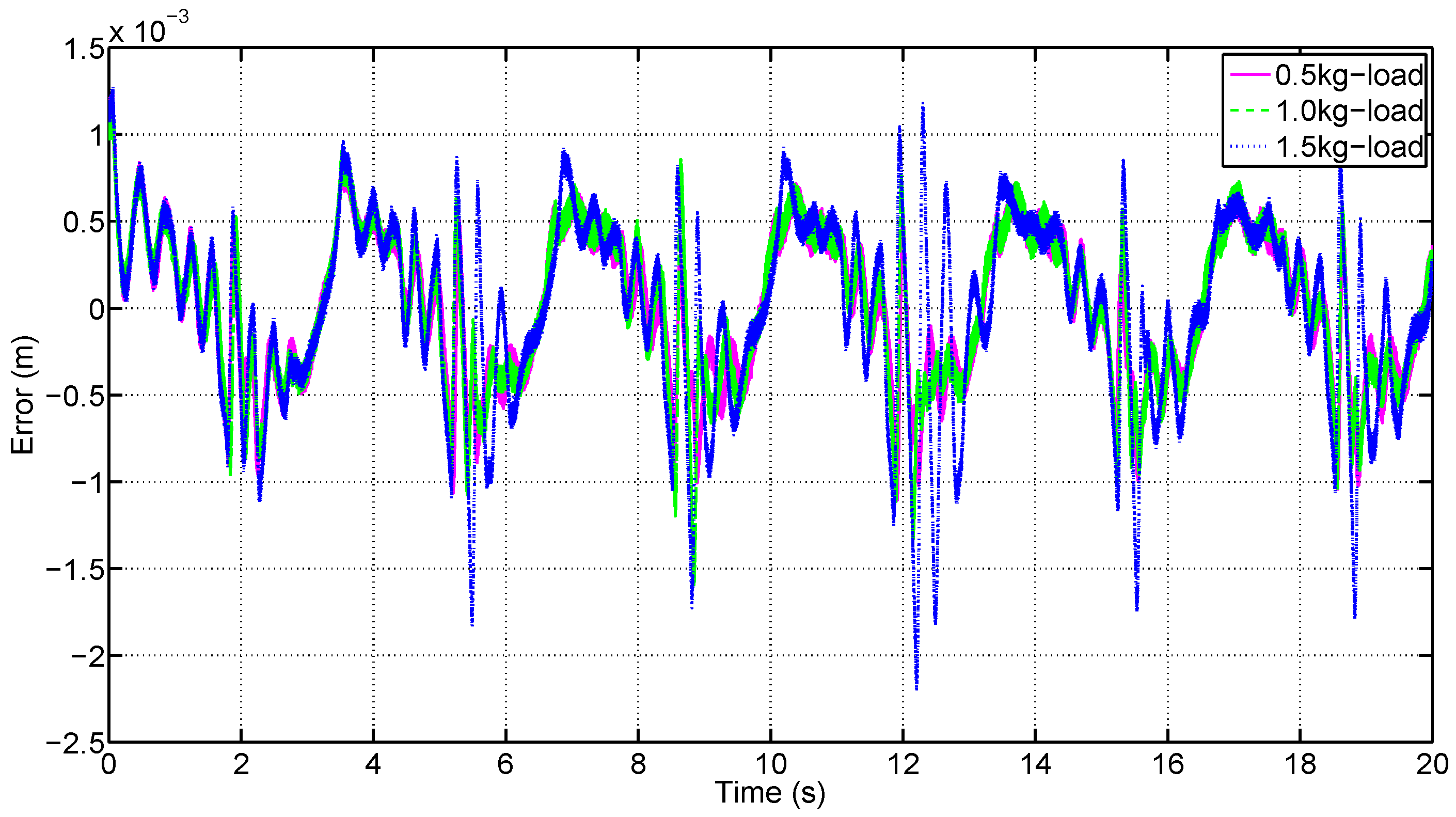
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| PMA | Pneumatic Muscle Actuator |
| SMC | Sliding Mode Control |
| PSMC | Proxy-based Sliding Mode Control |
| EPSMC | Extended Proxy-based Sliding Mode Control |
| PID | Proportional-Integral-Derivative |
| ANN | Artificial Neural Network |
| FBDO | Fuzzy-Based Disturbance Observer |
| MPC | Model Predictive Control |
| ESN | Echo State Networks |
| DSC | Dynamic Surface Control |
References
- Hopman, W.M.; Verner, J. Quality of life during and after inpatient stroke rehabilitation. Stroke 2003, 34, 801. [Google Scholar] [CrossRef]
- Huang, J.; Tu, X.; He, J. Design and evaluation of the RUPERT wearable upper extremity exoskeleton robot for clinical and in-home therapies. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 926–935. [Google Scholar] [CrossRef]
- Huang, J.; Ri, M.H.; Wu, D.; Ri, S. Interval Type-2 Fuzzy Logic Modeling and Control of a Mobile Two-Wheeled Inverted Pendulum. IEEE Trans. Fuzzy Syst. 2018, 26, 2030–2038. [Google Scholar] [CrossRef]
- Wakita, K.; Huang, J.; Di, P.; Sekiyama, K.; Fukuda, T. Human Walking Intention Based Motion Control of Omni-directional Type Cane Robot. IEEE/ASME Trans. Mechatron. 2013, 18, 285–296. [Google Scholar] [CrossRef]
- Nakagawa, S.; Hasegawa, Y.; Fukuda, T.; Kondo, I.; Tanimoto, M.; Di, P.; Huang, J.; Huang, Q. Tandem Stance Avoidance Using Adaptive and Asymmetric Admittance Control for Fall Prevention. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 542–550. [Google Scholar] [CrossRef]
- Song, A.; Wu, C.; Ni, D.; Li, H.; Qin, H. One-therapist to three-patient telerehabilitation robot system for the upper limb after stroke. IEEE Trans. Syst. Man Cybern. Syst. 2016, 8, 319–329. [Google Scholar] [CrossRef]
- Trujillo, P.; Mastropietro, A.; Scano, A.; Chiavenna, A.; Mrakic-Sposta, S.; Caimmi, M.; Molteni, F.; Rizzo, G. Quantitative EEG for Predicting Upper Limb Motor Recovery in Chronic Stroke Robot-Assisted Rehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1058–1067. [Google Scholar] [CrossRef]
- Marini, F.; Hughes, C.M.L.; Squeri, V.; Doglio, L.; Moretti, P.; Morasso, P.; Masia, L. Robotic wrist training after stroke: Adaptive modulation of assistance in pediatric rehabilitation. Robot. Auton. Syst. 2017, 91, 169–178. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Systems 2000, 20, 15–38. [Google Scholar]
- Morales, R.; Badesa, F.J.; Garcia-Aracil, N.; Sabater, J.M.; Pérez-Vidal, C. Pneumatic robotic systems for upper limb rehabilitation. Med. Biol. Eng. Comput. 2011, 49, 1145. [Google Scholar] [CrossRef]
- Polygerinos, P.; Lyne, S.; Wang, Z.; Nicolini, L.F.; Mosadegh, B.; Whitesides, G.M.; Walsh, C.J. Towards a soft pneumatic glove for hand rehabilitation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1512–1517. [Google Scholar]
- Ohta, P.; Valle, L.; King, J.; Low, K.; Yi, J.; Atkeson, C.G.; Park, Y.-L. Design of a lightweight soft robotic arm using pneumatic artificial muscles and inflatable sleeves. Soft Robot. 2018, 5, 204–215. [Google Scholar] [CrossRef] [PubMed]
- Kang, R.; Guo, Y.; Chen, L.; Branson III, D.T.; Dai, J.S. Design of a pneumatic muscle based continuum robot with embedded tendons. IEEE/ASME Trans. Mechatron. 2017, 22, 751–761. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Hussain, S.; Ghayesh, M.H.; Rogozina, S.V. Impedance control of an intrinsically compliant parallel ankle rehabilitation robot. IEEE Trans. Ind. Electron. 2016, 63, 3638–3647. [Google Scholar] [CrossRef]
- Cui, Y.; Matsubara, T.; Sugimoto, K. Pneumatic artificial muscle-driven robot control using local update reinforcement learning. Adv. Robot. 2017, 31, 397–412. [Google Scholar] [CrossRef]
- Xiong, C.; Jiang, X.; Sun, R.; Huang, X.L.; Xiong, Y.L. Control methods for exoskeleton rehabilitation robot driven with pneumatic muscles. Ind. Robot Int. J. 2009, 36, 210–220. [Google Scholar] [CrossRef]
- Dao, Q.; Yamamoto, S. Assist-as-Needed Control of a Robotic Orthosis Actuated by Pneumatic Artificial Muscle for Gait Rehabilitation. Appl. Sci. 2018, 8, 499. [Google Scholar] [CrossRef]
- Van Damme, M.; Daerden, F.; Lefeber, D. A pneumatic manipulator used in direct contact with an operator. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4494–4499. [Google Scholar]
- Zhang, J.F.; Yang, C.J.; Chen, Y.; Zhang, Y.; Dong, Y.M. Modeling and control of a curved pneumatic muscle actuator for wearable elbow exoskeleton. Mechatronics 2008, 18, 448–457. [Google Scholar] [CrossRef]
- Xie, S.Q.; Jamwal, P.K. An iterative fuzzy controller for pneumatic muscle driven rehabilitation robot. Expert Syst. Appl. 2011, 38, 8128–8137. [Google Scholar] [CrossRef]
- Chang, M.K. An adaptive self-organizing fuzzy sliding mode controller for a 2-DOF rehabilitation robot actuated by pneumatic muscle actuators. Control Eng. Pract. 2010, 18, 13–22. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Xie, S.Q.; Hussain, S.; Parsons, J.G. An adaptive wearable parallel robot for the treatment of ankle injuries. IEEE/ASME Trans. Mechatron. 2014, 19, 64–75. [Google Scholar] [CrossRef]
- Huang, J.; Qian, J.; Liu, L.; Wang, Y.; Xiong, C.; Ri, S. Echo state network based predictive control with particle swarm optimization for pneumatic muscle actuator. J. Frankl. Inst. 2016, 353, 2761–2782. [Google Scholar] [CrossRef]
- Huang, J.; Cao, Y.; Xiong, C.; Zhang, H.-T. An Echo State Gaussian Process Based Nonlinear Model Predictive Control for Pneumatic Muscle Actuators. IEEE Trans. on Autom. Sci. Eng. 2018. [Google Scholar] [CrossRef]
- Wu, J.; Huang, J.; Wang, Y.; Xing, K. Nonlinear Disturbance Observer-Based Dynamic Surface Control for Trajectory Tracking of Pneumatic Muscle System. IEEE Trans. Control Syst. Eng. 2014, 22, 440–455. [Google Scholar] [CrossRef]
- Vo-Minh, T.; Tjahjowidodo, T.; Ramon, H.; Brussel, H.V. A new approach to modeling hysteresis in a pneumatic artificial muscle using the Maxwell-slip model. IEEE/ASME Trans. Mechatron. 2011, 16, 177–186. [Google Scholar] [CrossRef]
- Shen, X. Nonlinear model-based control of pneumatic artificial muscle servo systems. Control Eng. Pract. 2010, 18, 311–317. [Google Scholar] [CrossRef]
- Xing, K.; Huang, J.; He, J.; Wang, Y.; Wu, J.; Xu, Q. Sliding mode tracking for actuators comprising pneumatic muscle and torsion spring. Trans. Inst. Meas. Control 2012, 34, 255–277. [Google Scholar] [CrossRef]
- Cao, J.; Xie, S.Q.; Das, R. MIMO Sliding Mode Controller for Gait Exoskeleton Driven by Pneumatic Muscles. IEEE Trans. Control Syst. Technol. 2018, 26, 274–281. [Google Scholar] [CrossRef]
- Aschemann, H.; Schindele, D. Sliding-Mode Control of a High-Speed Linear Axis Driven by Pneumatic Muscle Actuators. IEEE Trans. Ind. Electron. 2008, 55, 3855–3864. [Google Scholar] [CrossRef]
- Damme, M.V.; Vanderborght, B.; Verrelst, B.; Ham, R.V.; Daerden, F.; Lefeber, D. Proxy-based Sliding Mode Control of a Planar Pneumatic Manipulator. Int. J. Robot. Res. 2009, 28, 266–284. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H.; Fatikow, S. Proxy-based sliding-mode tracking control of piezoelectric-actuated nanopositioning stages. IEEE/ASME Trans. Mechatron. 2015, 20, 1956–1965. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Details |
|---|---|---|
| Displacement sensor | GA-75 | Measurementrange: 0–150 mm |
| Linearity: <0:1% (=0.09%) | ||
| Electromagnetic valve | ITV1030-211BS | Input: 0–5 V |
| Output: 0.005–0.5 MPa | ||
| Relieve-pressure valve | AW20-02BCG | Regulating range: 0.05–0.85 MPa |
| Pneumatic Muscle | FESTO DMSP-20-200N-RM | Inner diameter: 20 mm |
| Rated length: 60–9000 mm | ||
| Lifting force: 0–1500 N | ||
| Data acquisition board | NIPCI-6025E | 16 AI and 2 AO |
| 32 digital I/O buses | ||
| Sampling rate: 200 kS/s | ||
| Force sensor | TJL-1 | Measurement range: 0–300 N |
| Sensitivity: mV/V | ||
| Accuracy: 0.03% F· S | ||
| Power supply | Q-120DE | Input: AC 200 V, 50 Hz |
| Output: ±5 V, ±12 V, ±24 V | ||
| Air compressor | Denair, DW35 | Capacity: 150 L |
| Power: 800 W | ||
| Exhaust pressure: 0.8 MPa |
| Strategy | MaxERROR (m) | InteERROR (m) |
|---|---|---|
| EPSMC | ||
| SMC | ||
| PSMC | ||
| PID | ||
| Fuzzy Control |
| Weight | MaxERROR (m) | InteERROR (m) |
|---|---|---|
| 0.5 kg-load | ||
| 1.0 kg-load | ||
| 1.5 kg-load |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Song, A.; Cao, Y. An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators. Appl. Sci. 2019, 9, 1571. https://doi.org/10.3390/app9081571
Zhao W, Song A, Cao Y. An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators. Applied Sciences. 2019; 9(8):1571. https://doi.org/10.3390/app9081571
Chicago/Turabian StyleZhao, Wei, Aiguo Song, and Yu Cao. 2019. "An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators" Applied Sciences 9, no. 8: 1571. https://doi.org/10.3390/app9081571
APA StyleZhao, W., Song, A., & Cao, Y. (2019). An Extended Proxy-Based Sliding Mode Control of Pneumatic Muscle Actuators. Applied Sciences, 9(8), 1571. https://doi.org/10.3390/app9081571