Learning, Generalization, and Obstacle Avoidance with Dynamic Movement Primitives and Dynamic Potential Fields


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Dynamic System Framework for Movement Generation
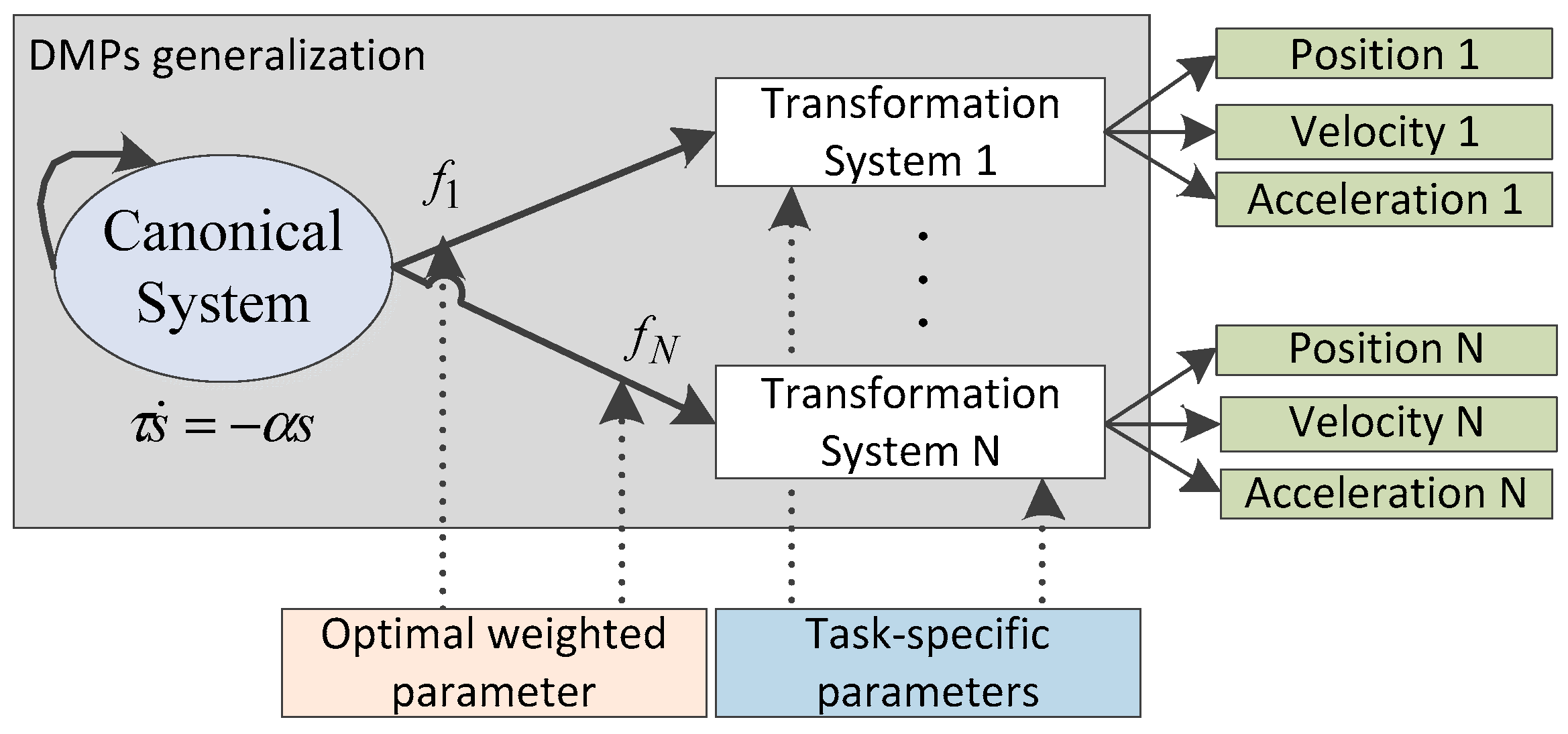
2.1. Dynamic Movement Primitives Model
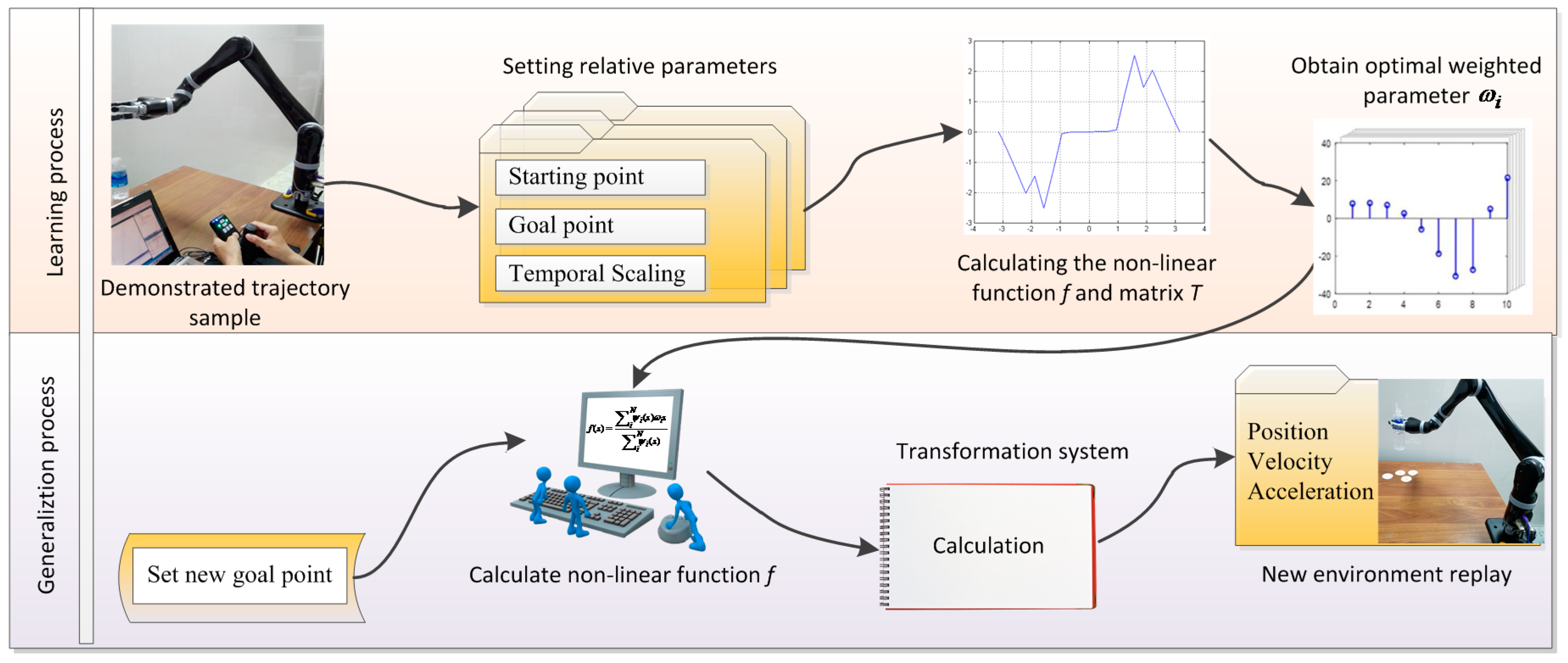
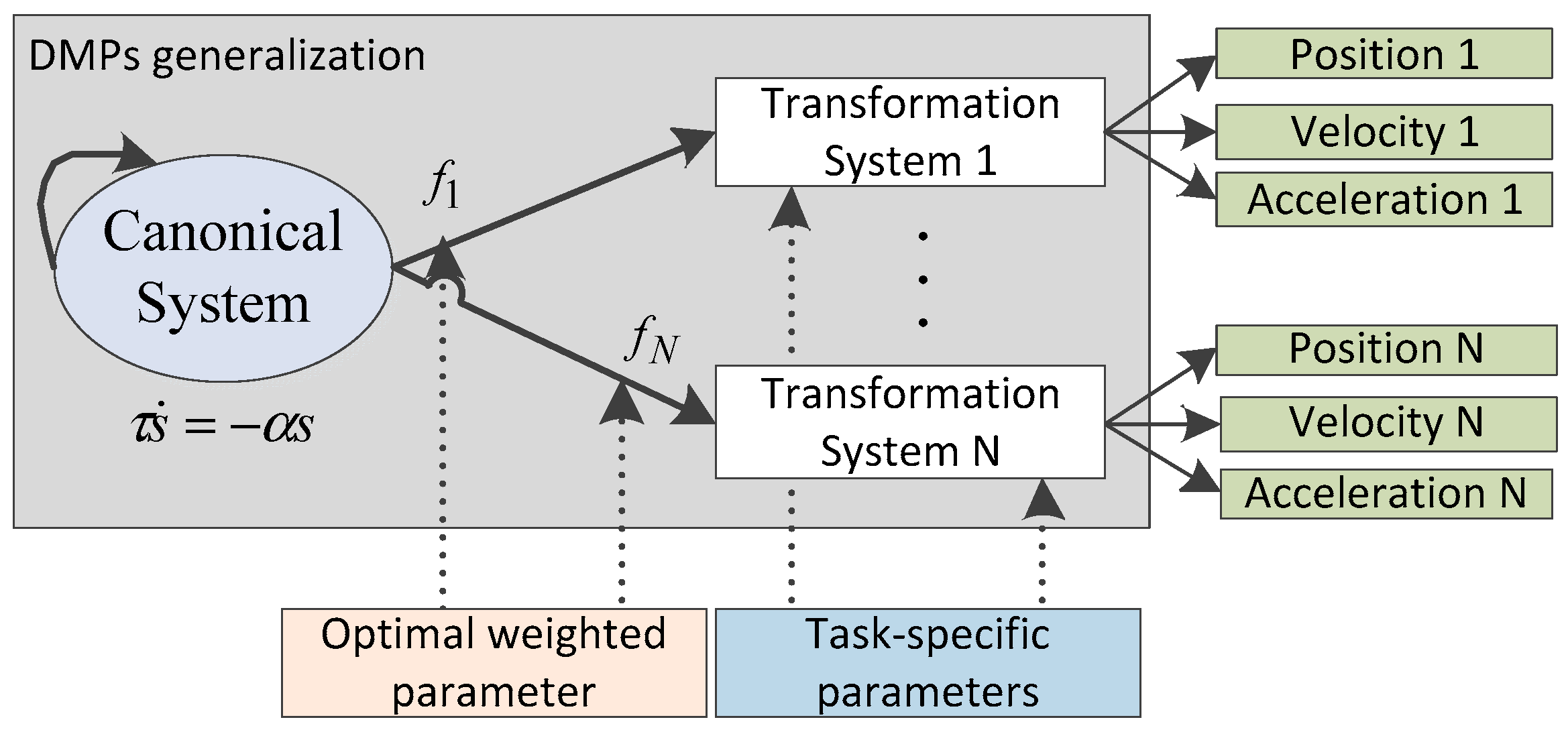
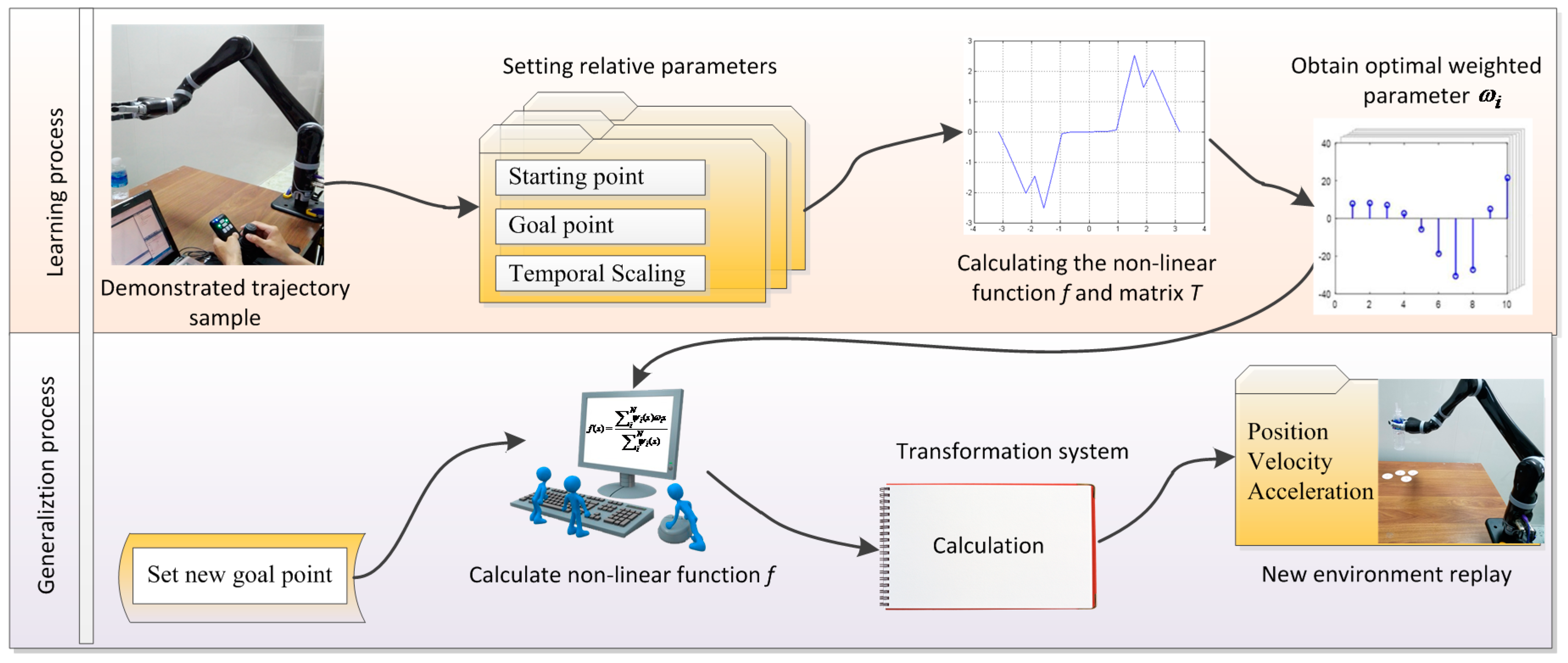
2.2. Learning and Generalization Process of DMPs
3. DMPs-DPF Approach for Obstacle Avoidance
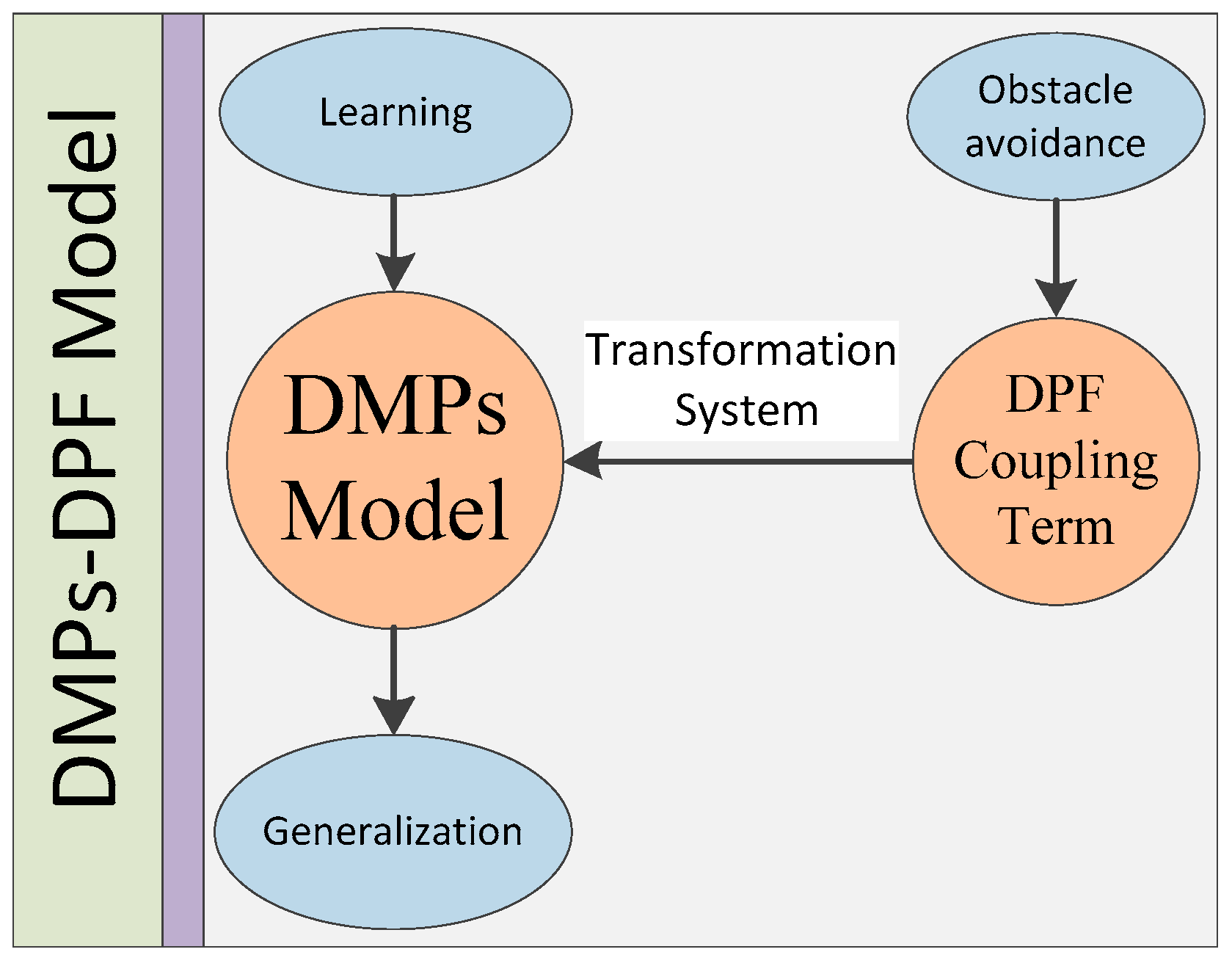
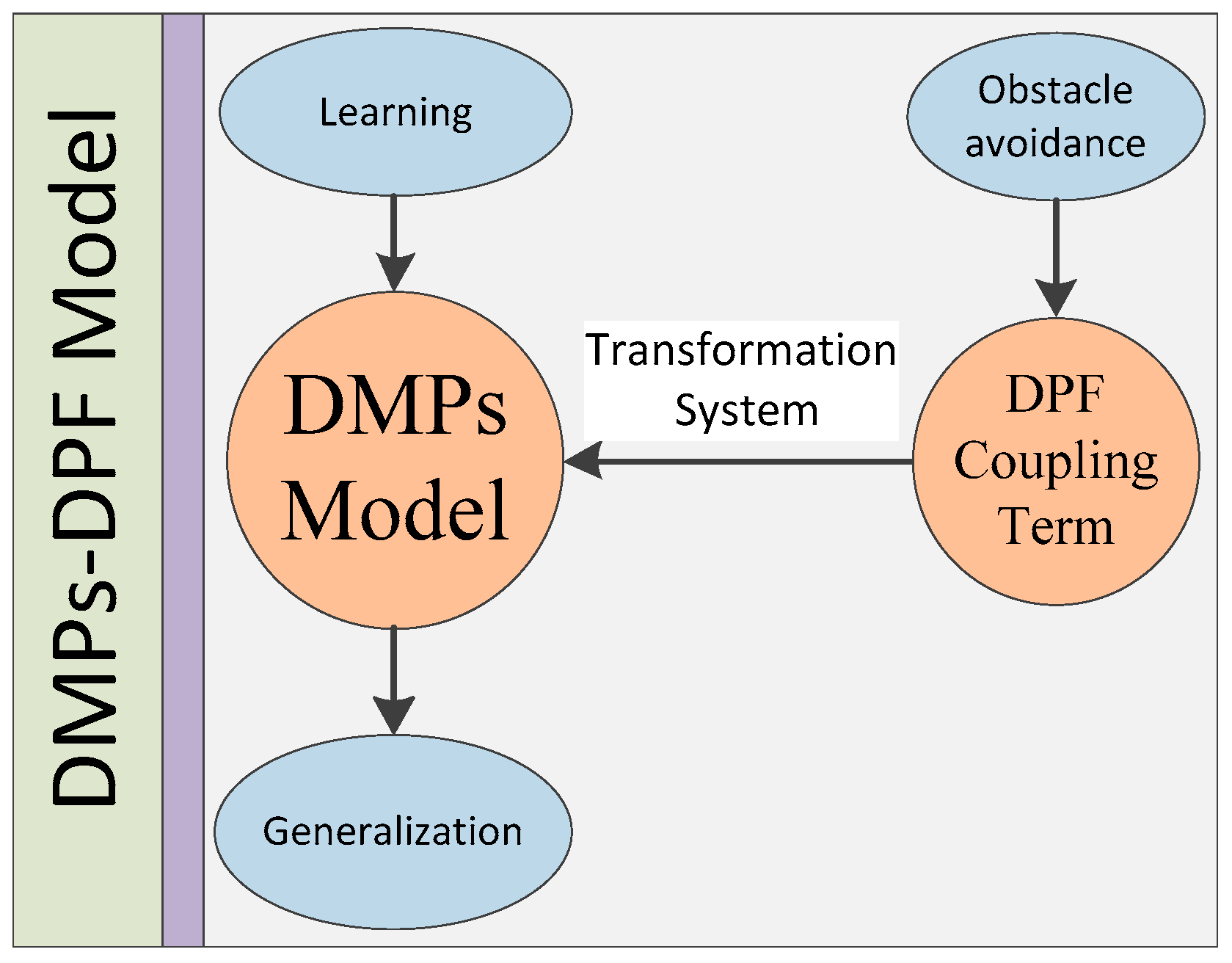
3.1. Overall Framework of DMPs-DPF Approach
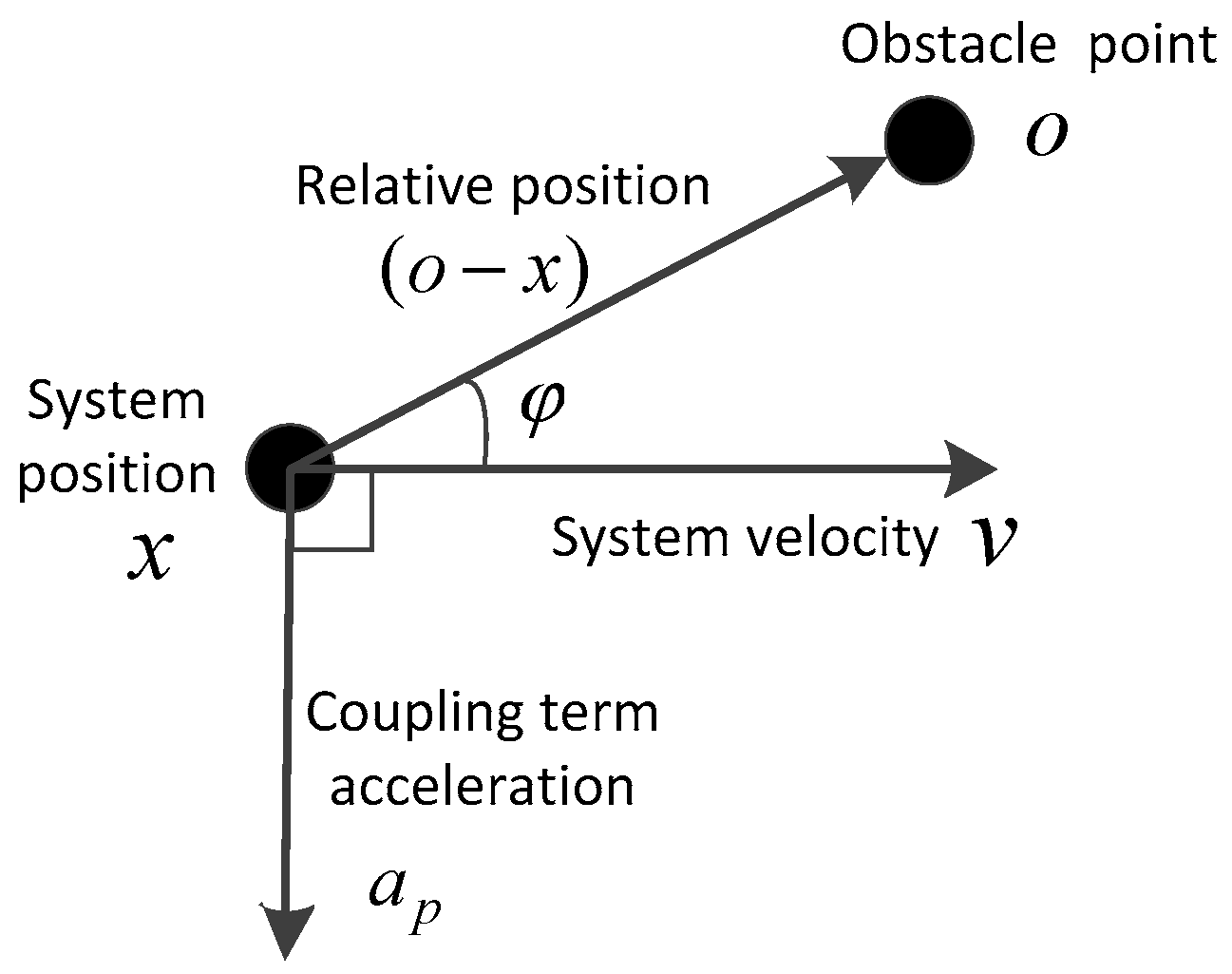
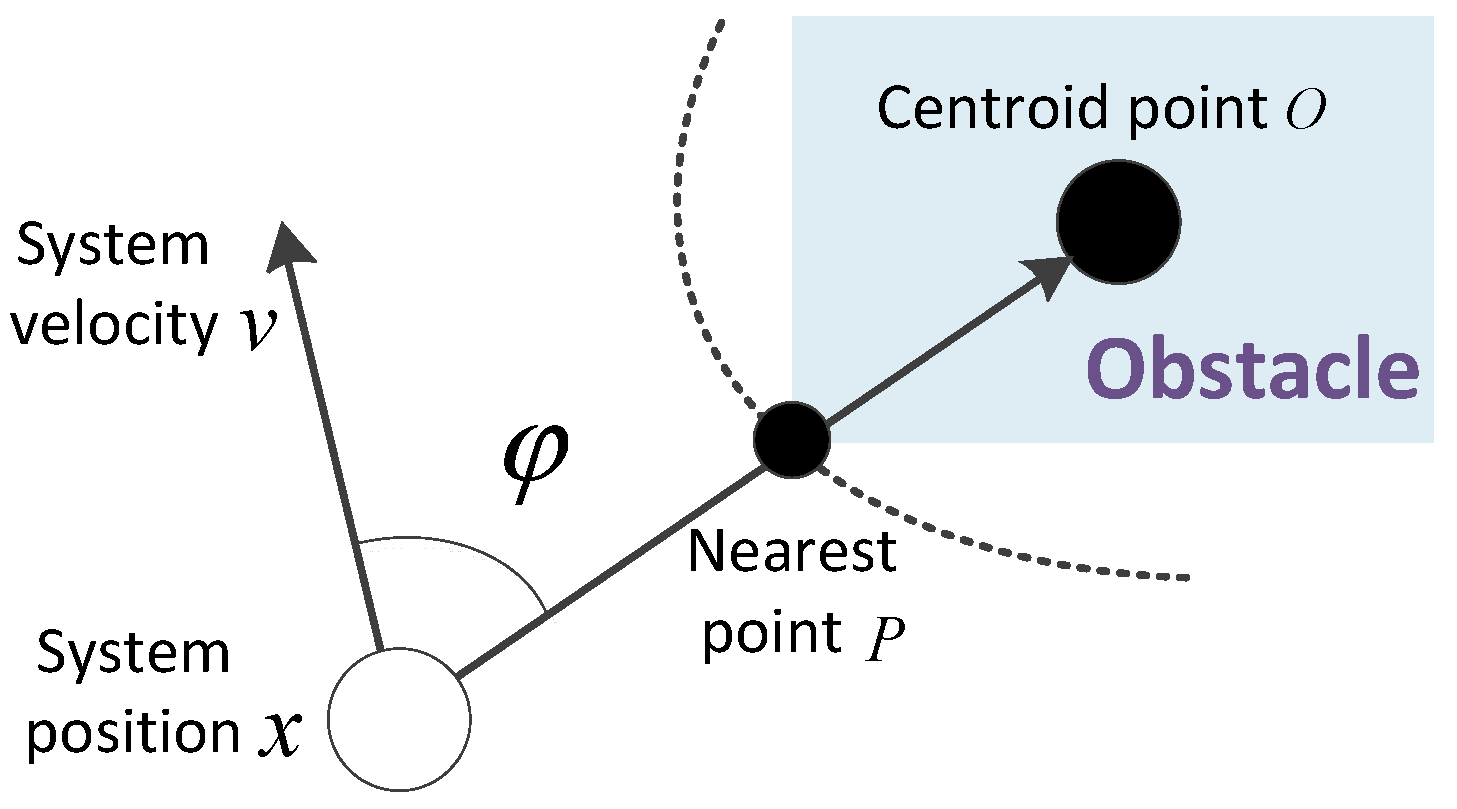
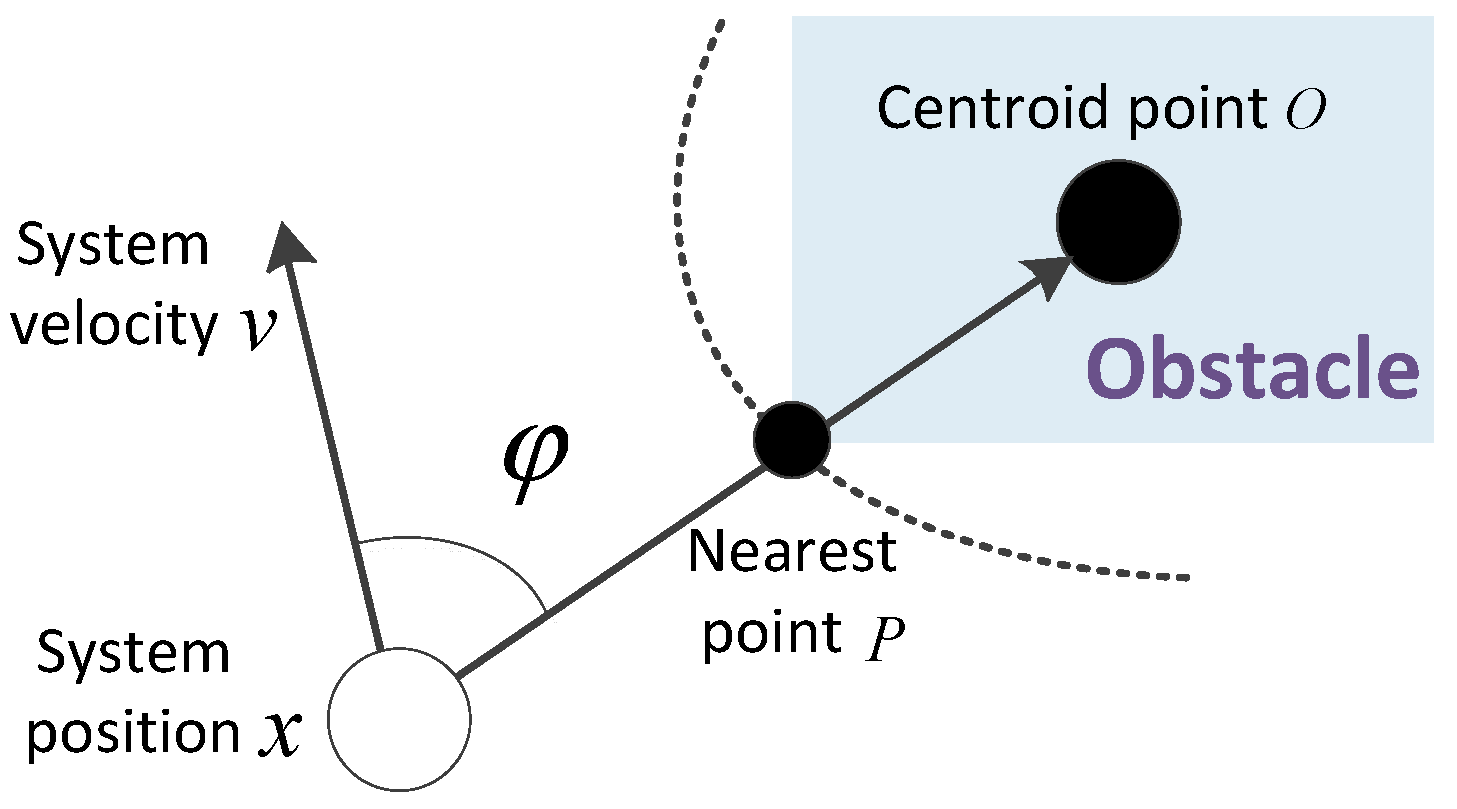
3.2. Description of the DPF Coupling Term
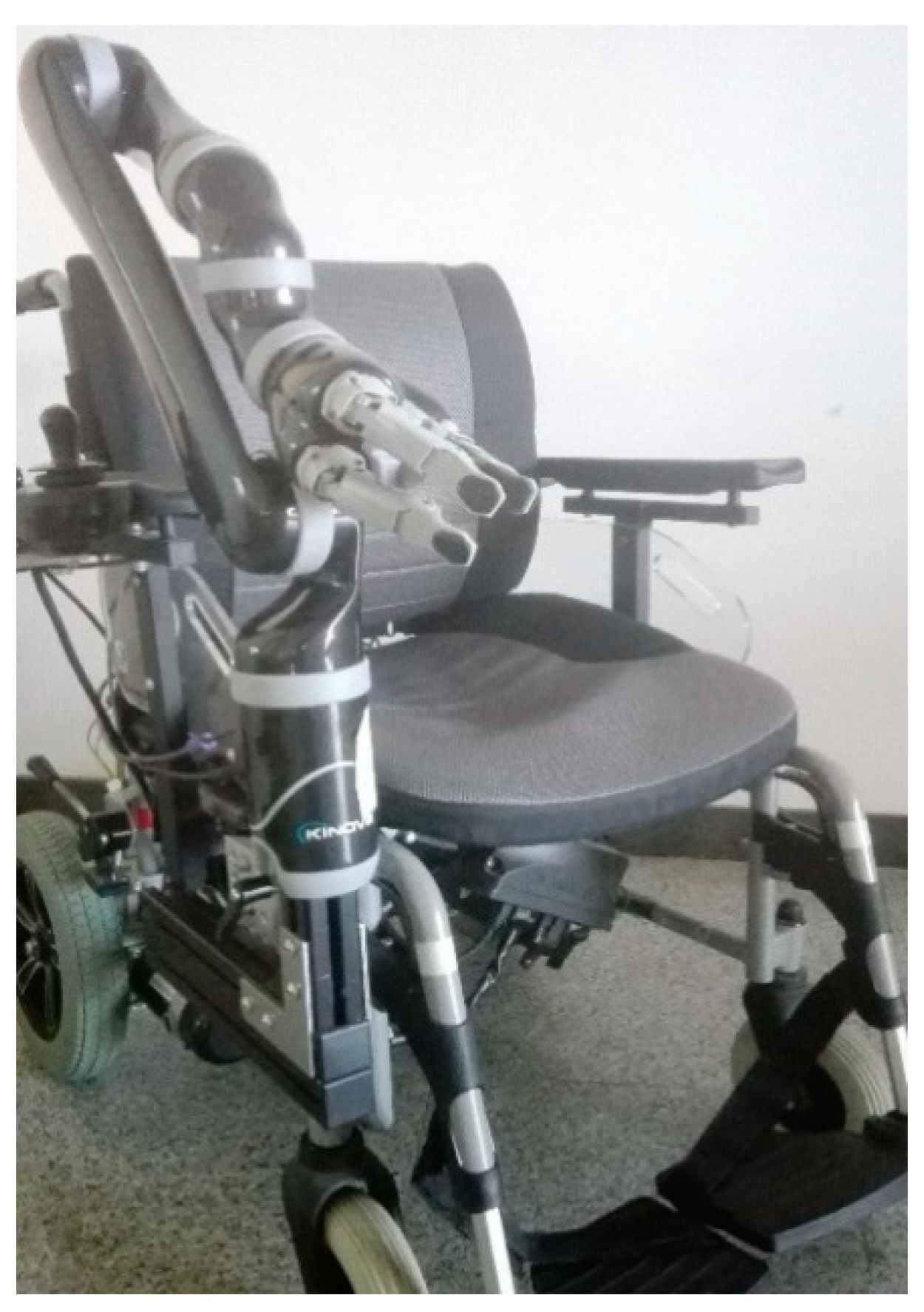
4. Robot Experiment
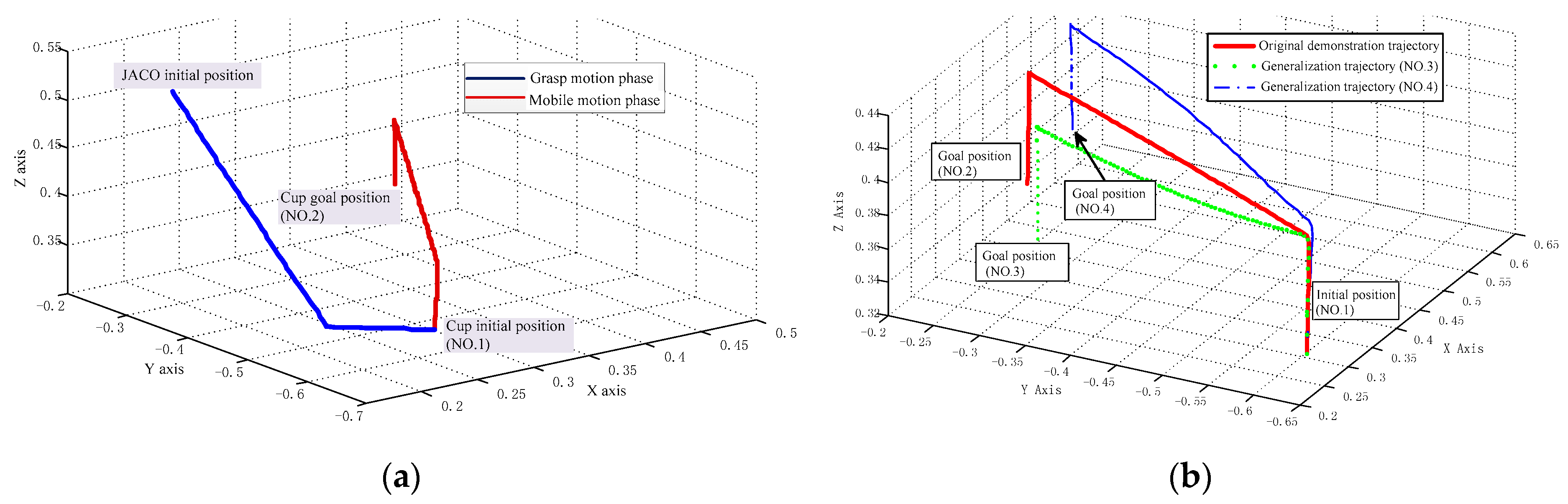
4.1. Task Demonstration
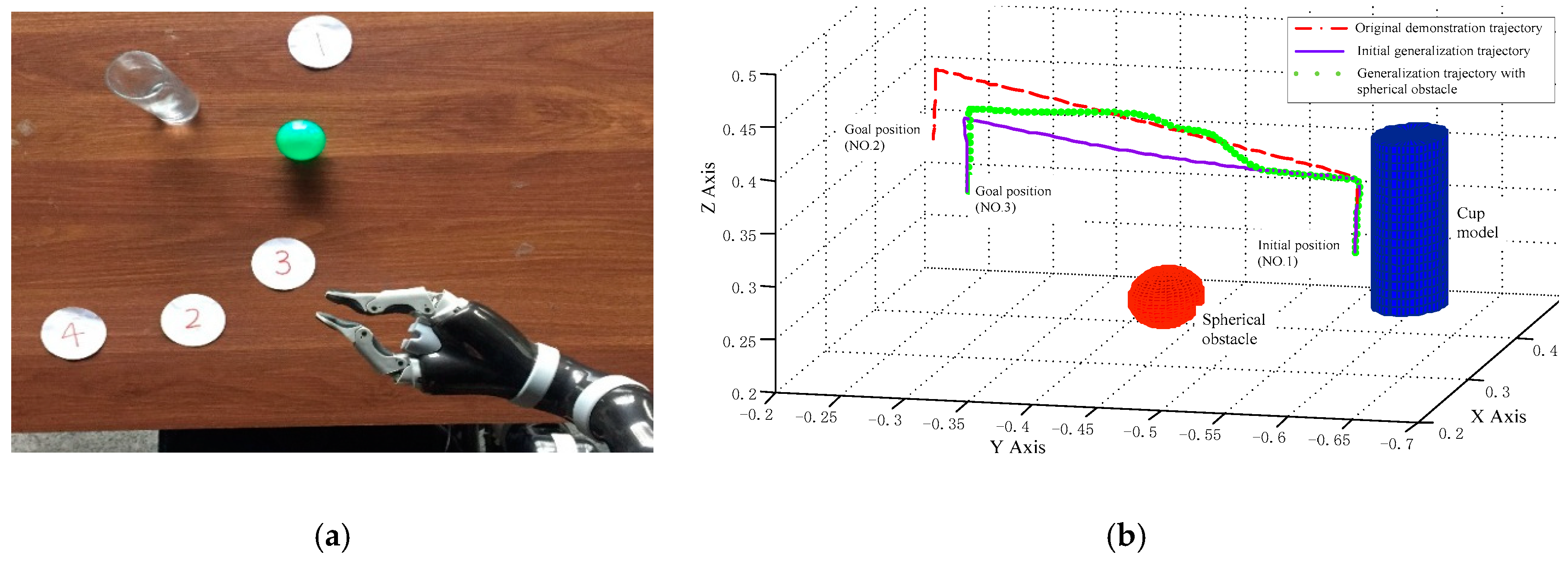
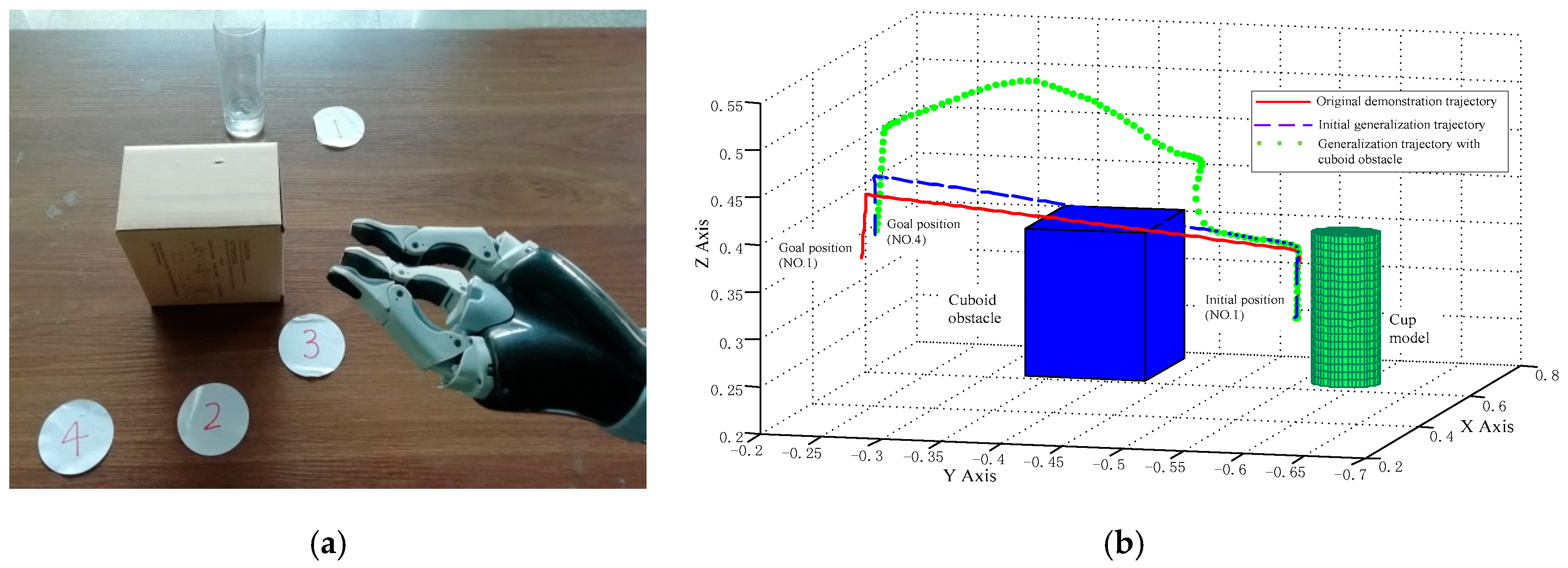
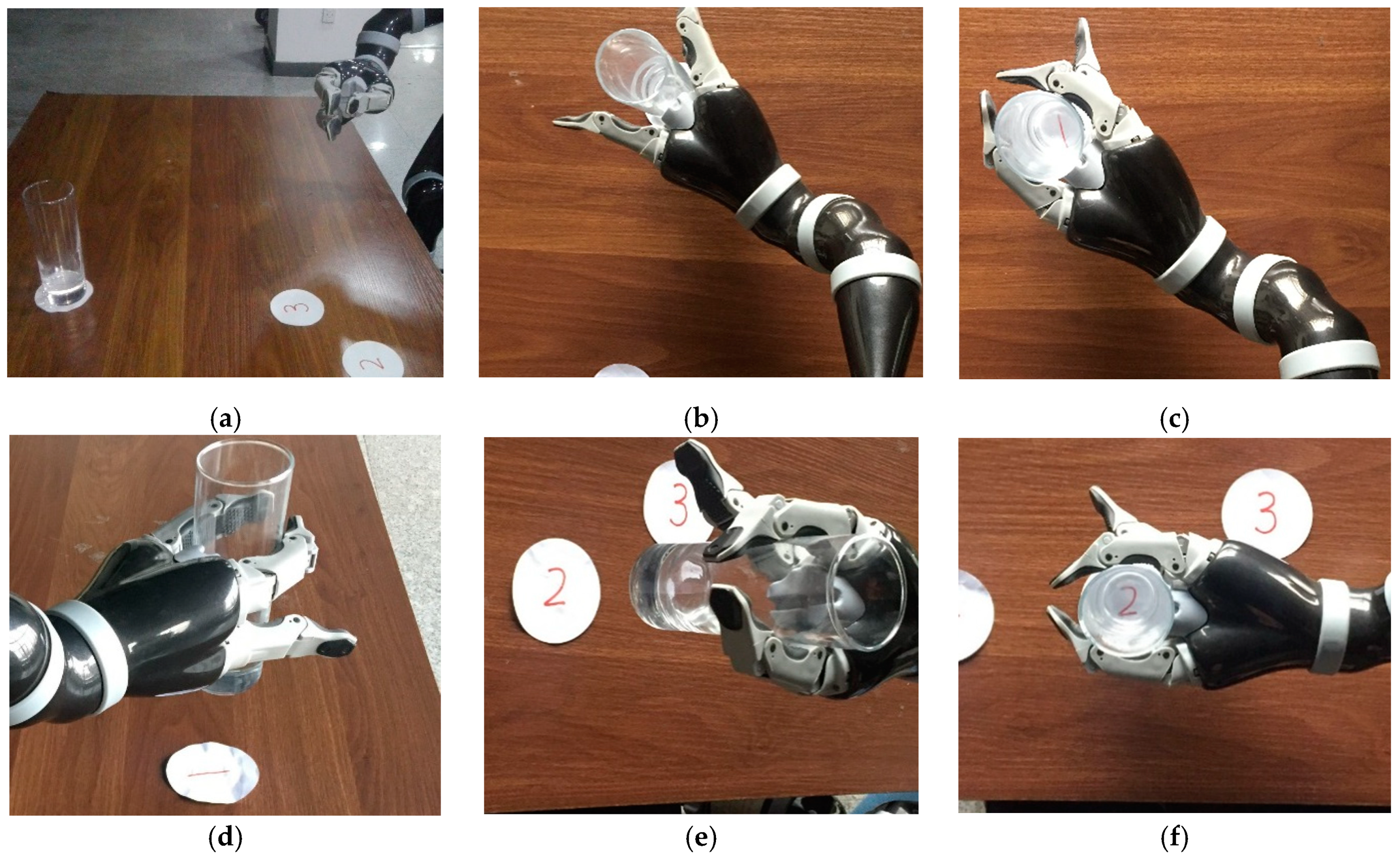
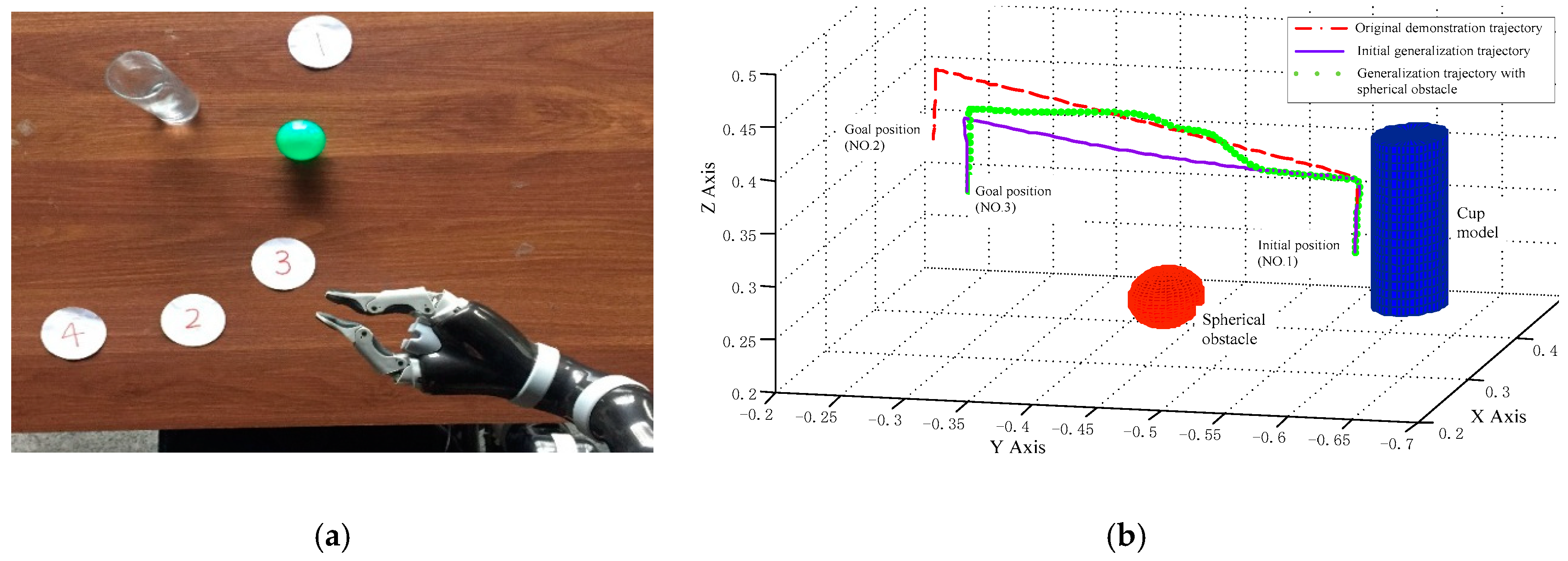
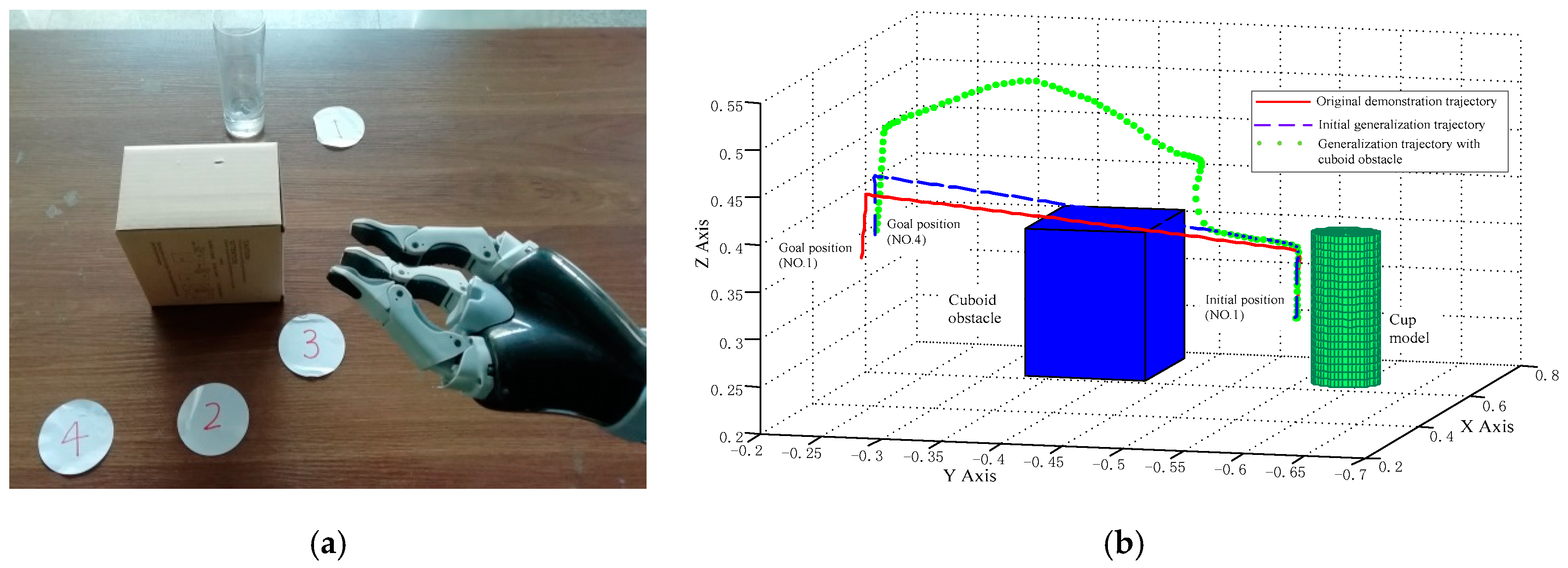
4.2. An Experiment of Placing a Cup on the Table
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alqasemi, R.M.; McCaffrey, E.J.; Edwards, K.D.; Dubey, R.V. Analysis, evaluation and development of wheelchair-mounted robotic arms. In Proceedings of the 9th International Conference on Rehabilitation Robotics, Chicago, IL, USA, 28 June–1 July 2005; pp. 469–472. [Google Scholar]
- Abolghasemi, P.; Rahmatizadeh, R.; Behal, A.; Bölöni, L. Real-time placement of a wheelchair-mounted robotic arm. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication, New York, NY, USA, 26–31 August 2016; pp. 1032–1037. [Google Scholar]
- Kim, D.-J.; Wang, Z.; Paperno, N.; Behal, A. System design and implementation of UCF-MANUS—An intelligent assistive robotic manipulator. IEEE-ASME Trans. Mechatron. 2014, 19, 225–237. [Google Scholar] [CrossRef]
- Kim, B.-H. Analysis on Load Torque Effect for Assistive Robotic Arms. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 276–283. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Z.; Suga, Y.; Iwata, H.; Sugano, S. Intuitive operation of a wheelchair mounted robotic arm for the upper limb disabled: The mouth-only approach. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Guangzhou, China, 11–14 December 2012; pp. 1733–1740. [Google Scholar]
- Kim, D.-J.; Wang, Z.; Behal, A. Motion segmentation and control design for UCF-MANUS—An intelligent assistive robotic manipulator. IEEE-ASME Trans. Mechatron. 2012, 17, 936–948. [Google Scholar] [CrossRef]
- Rai, A.; Meier, F.; Ijspeert, A.; Schaal, S. Learning coupling terms for obstacle avoidance. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 512–518. [Google Scholar]
- Katz, D.; Venkatraman, A.; Kazemi, M.; Bagnell, J.A.; Stentz, A. Perceiving, learning, and exploiting object affordances for autonomous pile manipulation. Auton. Robot. 2014, 37, 369–382. [Google Scholar] [CrossRef]
- Rai, A.; Sutanto, G.; Schaal, S.; Meier, F. Learning feedback terms for reactive planning and control. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2184–2191. [Google Scholar]
- Gams, A.; Ijspeert, A.J.; Schaal, S.; Lenarčič, J. On-line learning and modulation of periodic movements with nonlinear dynamical systems. Auton. Robot. 2009, 27, 3–23. [Google Scholar] [CrossRef]
- Lee, K.; Im, D.-Y.; Kwak, B.; Ryoo, Y.-J. Design of fuzzy-PID controller for path tracking of mobile robot with differential drive. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 220–228. [Google Scholar]
- Hamid, K.R.; Talukder, A.; Islam, A.E. Implementation of Fuzzy Aided Kalman Filter for Tracking a Moving Object in Two-Dimensional Space. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 85–96. [Google Scholar] [CrossRef]
- Park, D.; Hoffmann, H.; Pastor, P.; Schaal, S. Movement reproduction and obstacle avoidance with dynamic movement primitives and potential fields. In Proceedings of the 8th IEEE-RAS International Conference on Humanoid Robots, Daejeon, South Korea, 1–3 December 2008; pp. 91–98. [Google Scholar]
- Billard, A.; Calinon, S.; Dillmann, R.; Schaal, S. Robot Programming by Demonstration. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Heidelberg, Germany, 2008; pp. 1371–1394. [Google Scholar]
- Chernova, S.; Thomaz, A.L. Robot learning from human teachers. Synth. Lect. Artif. Intell. Mach. Learn. 2014, 8, 1–121. [Google Scholar] [CrossRef]
- Pastor, P.; Hoffmann, H.; Asfour, T.; Schaal, S. Learning and generalization of motor skills by learning from demonstration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 763–768. [Google Scholar]
- Ijspeert, A.J.; Nakanishi, J.; Schaal, S. Learning attractor landscapes for learning motor primitives. In Proceedings of the Advances in neural information processing systems (NIPS 2002), Vancouver, BC, Canada, 9–14 December 2002; pp. 1547–1554. [Google Scholar]
- Schaal, S. Dynamic Movement Primitives -A Framework for Motor Control in Humans and Humanoid Robotics. In Adaptive Motion of Animals and Machines; Kimura, H., Tsuchiya, K., Ishiguro, A., Witte, H., Eds.; Springer: Tokyo, Japan, 2006; pp. 261–280. [Google Scholar]
- Yang, C.; Zeng, C.; Fang, C.; He, W.; Li, Z. A DMPs-Based Framework for Robot Learning and Generalization of Humanlike Variable Impedance Skills. IEEE-ASME Trans. Mechatron. 2018, 23, 1193–1203. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Nakanishi, J.; Hoffmann, H.; Pastor, P.; Schaal, S. Dynamical movement primitives: Learning attractor models for motor behaviors. Neural Comput. 2013, 25, 328–373. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, T.; Chen, F.; Hu, Y.; Su, C.Y.; Fukuda, T. Reinforcement Learning of Manipulation and Grasping Using Dynamical Movement Primitives for a Humanoidlike Mobile Manipulator. IEEE-ASME Trans. Mechatron. 2018, 23, 121–131. [Google Scholar] [CrossRef]
- Karlsson, M.; Robertsson, A.; Johansson, R. Autonomous interpretation of demonstrations for modification of dynamical movement primitives. In Proceedings of the IEEE International Conference on Robotics & Automation, Singapore, 29 May–3 June 2017; pp. 316–321. [Google Scholar]
- Hoffmann, H.; Pastor, P.; Park, D.; Schaal, S. Biologically-inspired dynamical systems for movement generation: Automatic real-time goal adaptation and obstacle avoidance. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2587–2592. [Google Scholar]
- Niekum, S.; Osentoski, S.; Konidaris, G.; Chitta, S.; Marthi, B.; Barto, A.G. Learning grounded finite-state representations from unstructured demonstrations. Int. J. Robot. Res. 2015, 34, 131–157. [Google Scholar] [CrossRef]
- Khansari-Zadeh, S.M.; Billard, A. A dynamical system approach to realtime obstacle avoidance. Auton. Robot. 2012, 32, 433–454. [Google Scholar] [CrossRef]
- Sary, I.P.; Nugraha, Y.P.; Megayanti, M.; Hidayat, E.; Trilaksono, B.R. Design of Obstacle Avoidance System on Hexacopter Using Vector Field Histogram-Plus. In Proceedings of the 8th IEEE International Conference on System Engineering and Technology (ICSET), Bandung, Indonesia, 15–16 Octorber 2018; pp. 18–23. [Google Scholar]
- Nelson, R.C.; Aloimonos, J.Y. Obstacle avoidance using flow field divergence. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 1102–1106. [Google Scholar] [CrossRef]
- Simmons, R. The curvature-velocity method for local obstacle avoidance. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3375–3382. [Google Scholar]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. Int. J. Robot. Res. 1986, 5, 90–98. [Google Scholar] [CrossRef]
- Rostami, S.M.H.; Sangaiah, A.K.; Wang, J.; Liu, X. Obstacle avoidance of mobile robots using modified artificial potential field algorithm. EURASIP J. Wirel. Comm. 2019, 2019, 70. [Google Scholar] [CrossRef]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 995–1001. [Google Scholar]
- Hsu, D.; Latombe, J.-C.; Kurniawati, H. On the Probabilistic Foundations of Probabilistic Roadmap Planning. Int. J. Robot. Res. 2007, 25, 83–97. [Google Scholar]
- Diankov, R.; Kuffner, J. Randomized statistical path planning. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 Octorber–2 November 2007; pp. 1–6. [Google Scholar]
- Toussaint, M. Robot trajectory optimization using approximate inference. In Proceedings of the 26th Annual International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 1049–1056. [Google Scholar]
- Masoud, A.A. Managing the dynamics of a harmonic potential field-guided robot in a cluttered environment. IEEE Trans. Ind. Electron. 2009, 56, 488–496. [Google Scholar] [CrossRef]
- Montiel, O.; Orozco-Rosas, U.; Sepúlveda, R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles. Expert Syst. Appl. 2015, 42, 5177–5191. [Google Scholar] [CrossRef]
- Wu, Z.; Hu, G.; Feng, L.; Wu, J.; Liu, S. Collision avoidance for mobile robots based on artificial potential field and obstacle envelope modelling. Assem. Autom. 2016, 36, 318–332. [Google Scholar] [CrossRef]
- Ranjbar, B.; Mahmoodi, J.; Karbasi, H.; Dashti, G.; Omidvar, A. Robot manipulator path planning based on intelligent multi-resolution potential field. IJUNESST 2015, 8, 11–26. [Google Scholar] [CrossRef]
- Fei, C.; Sekiyama, K.; Cannella, F.; Fukuda, T. Optimal Subtask Allocation for Human and Robot Collaboration Within Hybrid Assembly System. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1065–1075. [Google Scholar]
- Maeda, G.J.; Neumann, G.; Ewerton, M.; Lioutikov, R.; Kroemer, O.; Peters, J. Probabilistic movement primitives for coordination of multiple human–robot collaborative tasks. Auto. Robot. 2017, 41, 593–612. [Google Scholar] [CrossRef]
- Pastor, P.; Righetti, L.; Kalakrishnan, M.; Schaal, S. Online movement adaptation based on previous sensor experiences. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 365–371. [Google Scholar]
- Stulp, F.; Oztop, E.; Pastor, P.; Beetz, M.; Schaal, S. Compact models of motor primitive variations for predictable reaching and obstacle avoidance. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; pp. 589–595. [Google Scholar]
- Chi, M.; Yao, Y.; Liu, Y.; Teng, Y.; Zhong, M. Learning motion primitives from demonstration. Adv. Mech. Eng. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- Papoutsidakis, M.; Chatzopoulos, A.; Piromalis, D.; Tseles, D. A 4-DOF Robotic Arm—Kinematics and Implementation as Case Study in Laboratory Environment. IJCA 2017, 176, 34–38. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chi, M.; Yao, Y.; Liu, Y.; Zhong, M. Learning, Generalization, and Obstacle Avoidance with Dynamic Movement Primitives and Dynamic Potential Fields. Appl. Sci. 2019, 9, 1535. https://doi.org/10.3390/app9081535
Chi M, Yao Y, Liu Y, Zhong M. Learning, Generalization, and Obstacle Avoidance with Dynamic Movement Primitives and Dynamic Potential Fields. Applied Sciences. 2019; 9(8):1535. https://doi.org/10.3390/app9081535
Chicago/Turabian StyleChi, Mingshan, Yufeng Yao, Yaxin Liu, and Ming Zhong. 2019. "Learning, Generalization, and Obstacle Avoidance with Dynamic Movement Primitives and Dynamic Potential Fields" Applied Sciences 9, no. 8: 1535. https://doi.org/10.3390/app9081535
APA StyleChi, M., Yao, Y., Liu, Y., & Zhong, M. (2019). Learning, Generalization, and Obstacle Avoidance with Dynamic Movement Primitives and Dynamic Potential Fields. Applied Sciences, 9(8), 1535. https://doi.org/10.3390/app9081535