Establishment of a Standard Method for Boundary Slip Measurement on Smooth Surfaces Based on AFM


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
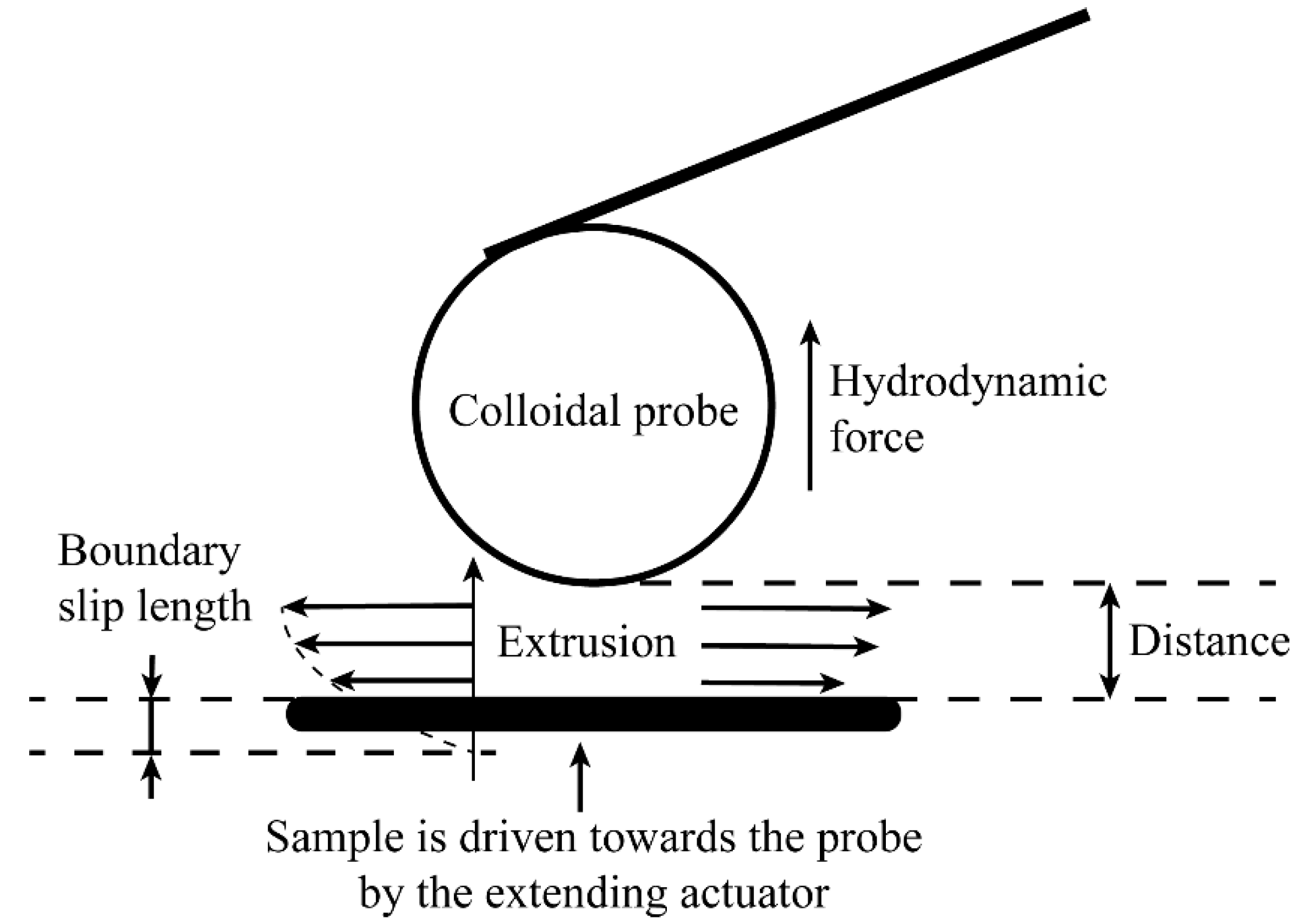
2. Measurement Model and Application Scope
3. Standard Process of Measuring Boundary Slip
3.1. Experimental Process
3.1.1. Sample and Condition
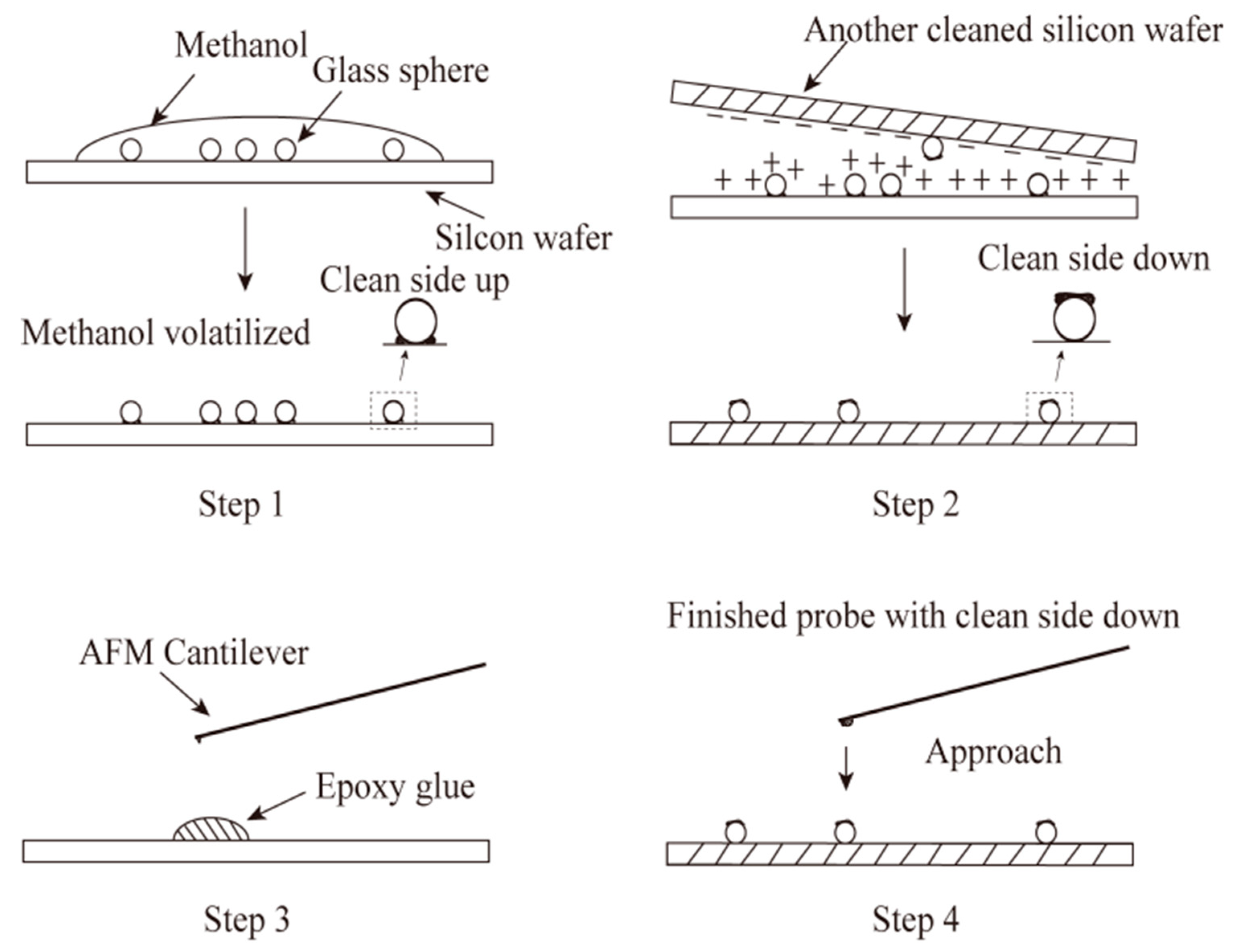
3.1.2. Probe Preparation
3.1.3. AFM Scan Mode
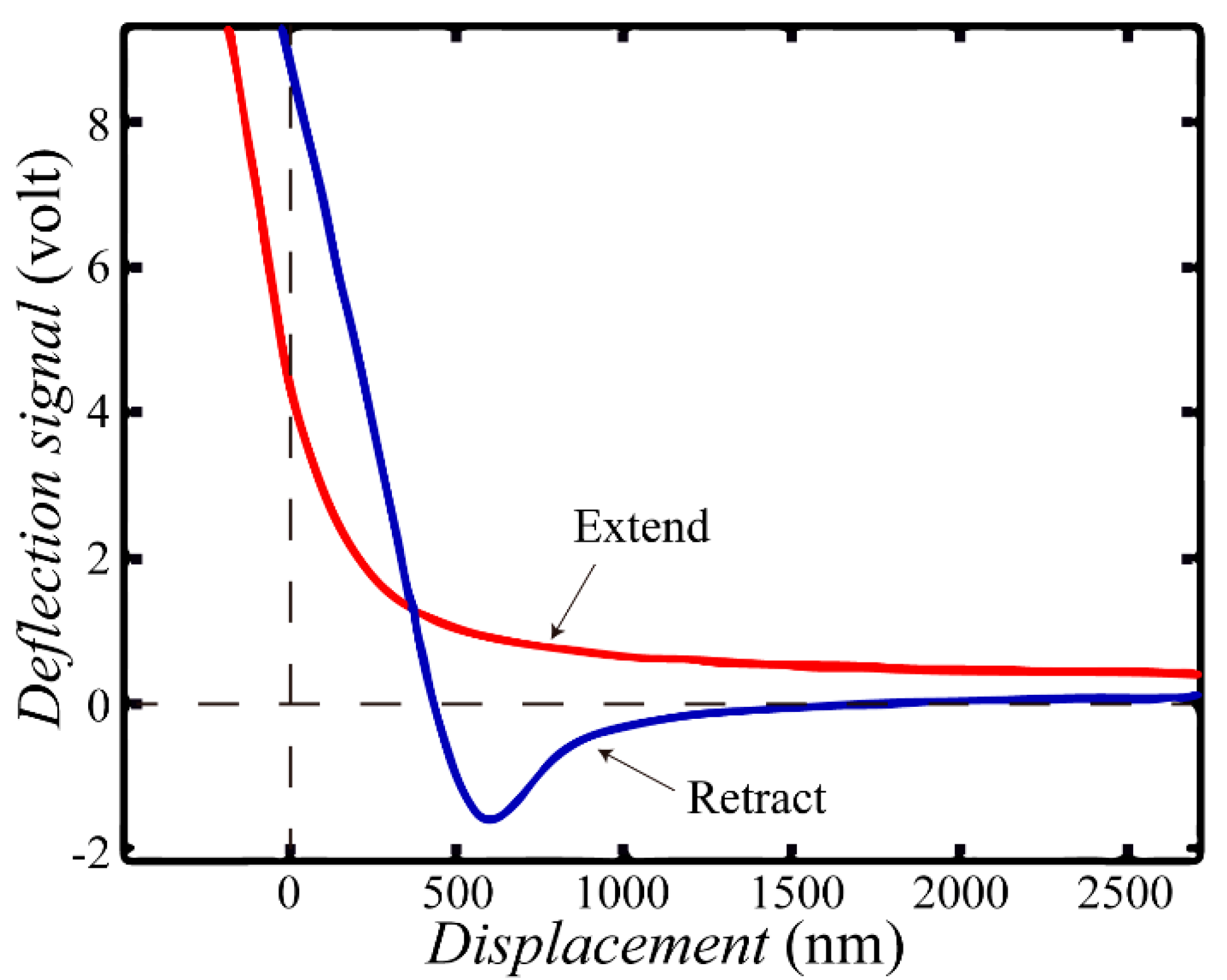
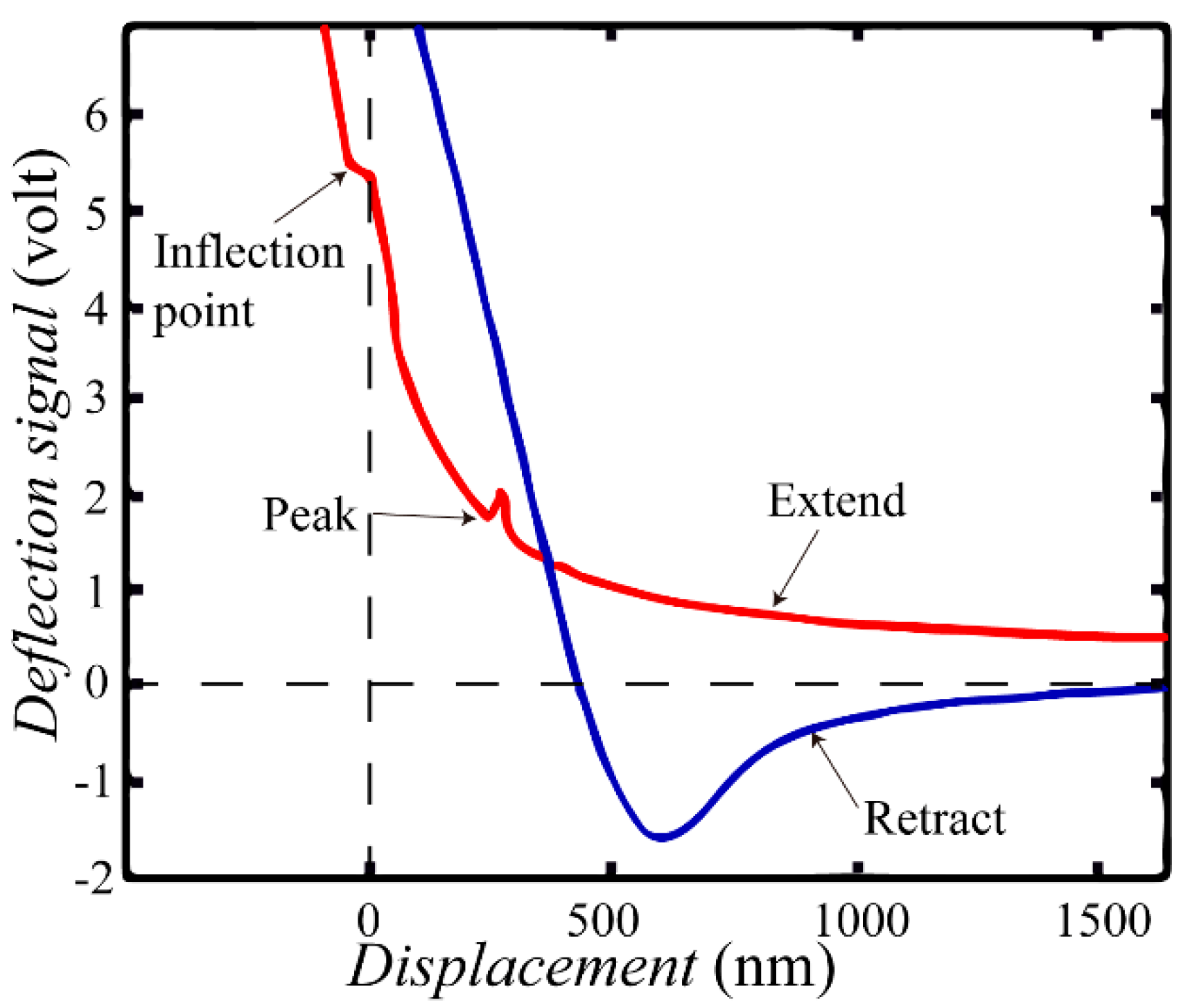
3.2. Data Processing
3.3. Roughness Correction of the Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Honig, C.D.F.; Ducker, W.A. Thin film lubrication for large colloidal particles: Experimental test of the no-slip boundary condition. J. Phys. Chem C 2007, 111, 16300–16312. [Google Scholar] [CrossRef]
- Nosonovsky, M.; Bhushan, B. Multiscale Dissipative Mechanisms and Hierarchical Surfaces: Friction, Superhydrophobicity, and Biomimetics; Springer: Heidelberg, Germany, 2008. [Google Scholar]
- Bhushan, B. Springer Handbook of Nanotechnology, 3rd ed.; Springer: Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Vinogradova, O.I. Slippage of water over hydrophobic surfaces. Int. J. Miner. Process. 1999, 56, 31–60. [Google Scholar] [CrossRef]
- Jing, D.; Pan, Y. Electroviscous effect and convective heat transfer of pressure-driven flow through microtubes with surface charge-dependent slip. Int. J. Heat Mass Transf. 2016, 101, 648–655. [Google Scholar] [CrossRef]
- Jing, D.; Pan, Y.; Wang, X. Joule heating, viscous dissipation and convective heat transfer of pressure-driven flow in a microchannel with surface charge-dependent slip. Int. J. Heat Mass Transf. 2017, 108, 1305–1313. [Google Scholar] [CrossRef]
- Baudry, J.; Charlaix, E.; Tonck, A.; Mazuyer, D. Experimental evidence for a large slip effect at a nonwetting fluid-solid interface. Langmuir 2001, 17, 5232–5236. [Google Scholar] [CrossRef]
- Cottin-Bizonne, C.; Cross, B.; Steinberger, A.; Charlaix, E. Boundary slip on smooth hydrophobic surfaces: Intrinsic effects and possible artifacts. Phys. Rev. Lett. 2005, 94, 056102. [Google Scholar] [CrossRef]
- Xue, Y.H.; Wu, Y.; Pei, X.W.; Duan, H.L.; Xue, Q.J.; Zhou, F. How solid-liquid adhesive property regulates liquid slippage on solid surfaces? Langmuir 2015, 31, 226–232. [Google Scholar] [CrossRef] [PubMed]
- Tretheway, D.C.; Meinhart, C.D. Apparent fluid slip at hydrophobic microchannel walls. Phys. Fluids 2002, 14, L9–L12. [Google Scholar] [CrossRef]
- Joseph, P.; Tabeling, P. Direct measurement of the apparent slip length. Phys. Rev. E 2005, 71, 035303. [Google Scholar] [CrossRef]
- VCraig, S.J.; Neto, C.; Williams, D.R.M. Shear-dependent boundary slip in an aqueous newtonian liquid. Phys. Rev. Lett. 2001, 87, 054504. [Google Scholar]
- Wang, Y.L.; Bhushan, B.; Maali, A. Atomic force microscopy measurement of boundary slip on hydrophilic, hydrophobic, and superhydrophobic surfaces. J. Vac. Sci. Technol. A 2009, 27, 754–760. [Google Scholar] [CrossRef]
- Maali, A.; Pan, Y.; Bhushan, B.; Charlaix, E. Hydrodynamic drag-force measurement and slip length on microstructured surfaces. Phys. Rev. E 2012, 85, 066310. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L.W.; Attard, P.; Neto, C. Reliable measurements of boundary slip by colloid probe atomic force microscopy. II. Hydrodynamic force measurements. Langmuir 2011, 27, 6712–6719. [Google Scholar] [CrossRef]
- Pan, Y.L.; Bhushan, B.; Zhao, X.Z. The study of surface wetting, nanobubbles and boundary slip with an applied voltage: A review. Beilstein J. Nanotechnol. 2014, 5, 1042–1065. [Google Scholar] [CrossRef]
- Pan, Y.L.; Bhushan, B. Role of surface charge on boundary slip in fluid flow. J. Colloid Interface Sci. 2013, 392, 117–121. [Google Scholar] [CrossRef]
- Jing, D.; Bhushan, B. The coupling of surface charge and boundary slip at the solid–liquid interface and their combined effect on fluid drag: A review. J. Colloid Interface Sci. 2015, 454, 152–179. [Google Scholar] [CrossRef]
- Bowles, A.P.; Ducker, W.A. Flow of water adjacent to smooth hydrophobic solids. J. Phys. Chem C 2013, 117, 14007–14013. [Google Scholar] [CrossRef]
- Henry, C.L.; Craig, V.S.J. Measurement of no-slip and slip boundary conditions in confined newtonian fluids using atomic force microscopy. Phys. Chem. Chem. Phys. 2009, 11, 9514–9521. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, T.S.; Butt, H.J.; Bonaccurso, E. Influence of the spring constant of cantilevers on hydrodynamic force measurements by the colloidal probe technique. Colloids Surf. A-Physicochem. Eng. Asp. 2010, 354, 72–80. [Google Scholar] [CrossRef]
- Honig, C.D.F.; Ducker, W.A. No-slip hydrodynamic boundary condition for hydrophilic particles. Phys. Rev. Lett. 2007, 98, 028305. [Google Scholar] [CrossRef] [PubMed]
- Guriyanova, S.; Semin, B.; Rodrigues, T.S.; Butt, H.J.; Bonaccurso, E. Hydrodynamic drainage force in a highly confined geometry: Role of surface roughness on different length scales. Microfluid. Nanofluidics 2010, 8, 653–663. [Google Scholar] [CrossRef]
- Bonaccurso, E.; Butt, H.J.; Craig, V.S.J. Surface roughness and hydrodynamic boundary slip of a newtonian fluid in a completely wetting system. Phys. Rev. Lett. 2003, 90, 144501. [Google Scholar] [CrossRef] [PubMed]
- Vinogradova, O.I.; Yakubov, G.E. Surface roughness and hydrodynamic boundary conditions. Phys. Rev. E 2006, 73, 045302. [Google Scholar] [CrossRef]
- Pan, Y.; Jing, D.; Zhao, X. Effect of Surface Roughness on the Measurement of Boundary Slip Based on Atomic Force Microscope. Sci. Adv. Mater. 2017, 9, 122–127. [Google Scholar] [CrossRef]
- Amano, K.I.; Iwaki, M.; Hashimoto, K.; Fukami, K.; Nishi, N.; Takahashi, O.; Sakka, T. Number Density Distribution of Small Particles around a Large Particle: Structural Analysis of a Colloidal Suspension. Langmuir 2016, 32, 11063–11070. [Google Scholar] [CrossRef] [PubMed]
- Amano, K.I.; Ishihara, T.; Hashimoto, K.; Ishida, N.; Fukami, K.; Nishi, N.; Sakka, T. Stratification of Colloidal Particles on a Surface: Study by a Colloidal Probe Atomic Force Microscopy Combined with a Transform Theory. J. Phys. Chem. B 2018, 122, 4592–4599. [Google Scholar] [CrossRef]
- Vinogradova, O.I. Drainage of a Thin Liquid-Film Confined between Hydrophobic Surfaces. Langmuir 1995, 11, 2213–2220. [Google Scholar] [CrossRef]
- Slattery, A.D.; Blanch, A.J.; Quinton, J.S.; Gibson, C.T. Accurate measurement of atomic force microscope cantilever deflection excluding tip-surface contact with application to force calibration. Ultramicroscopy 2013, 131, 46–55. [Google Scholar] [CrossRef]
- Sader, J.E.; Lu, J.; Mulvaney, P. Effect of cantilever geometry on the optical lever sensitivities and thermal noise method of the atomic force microscope. Rev. Sci. Instrum. 2014, 85, 113702. [Google Scholar] [CrossRef]
- Higgins, M.J.; Proksch, R.; Sader, J.E.; Polcik, M.; Mc Endoo, S.; Cleveland, J.P.; Jarvis, S.P. Noninvasive determination of optical lever sensitivity in atomic force microscopy. Rev. Sci. Instrum. 2016, 77, 013701. [Google Scholar] [CrossRef]
- Slattery, A.D.; Quinton, J.S.; Gibson, C.T. Atomic force microscope cantilever calibration using a focused ion beam. Nanotechnology 2012, 23, 285704. [Google Scholar] [CrossRef]
- Slattery, A.D.; Blanch, A.J.; Quinton, J.S.; Gibson, C.T. Calibration of atomic force microscope cantilevers using standard and inverted static methods assisted by FIB-milled spatial markers. Nanotechnology 2013, 24, 015710. [Google Scholar] [CrossRef] [PubMed]
- Sader, J.E.; Borgani, R.; Gibson, C.T.; Haviland, D.B.; Higgins, M.J.; Kilpatrick, J.I.; Lu, J.; Mulvaney, P.; Shearer, C.J.; Slattery, A.D.; et al. A virtual instrument to standardise the calibration of atomic force microscope cantilevers. Rev. Sci. Instrum. 2016, 87, 093711. [Google Scholar] [CrossRef]
- Haynes, W.M. Handbook of Chemistry and Physics, 96th ed.; Academic Press: New York, NY, USA, 2015. [Google Scholar]
- Attard, P.; Parker, J.L. Deformation and adhesion of elastic bodies in contact. Phys. Rev. A 1992, 46, 7959–7971. [Google Scholar] [CrossRef] [PubMed]
- Zhu, L.; Attard, P.; Neto, C. Reliable measurements of boundary slip by colloid probe atomic force microscopy. I. Mathematical modeling. Langmuir 2011, 27, 6701–6711. [Google Scholar] [CrossRef]
- Wang, Y.; Bhushan, B. Boundary slip and nanobubble study in micro/nanofluidics using atomic force microscopy. Soft Matter 2010, 6, 29. [Google Scholar] [CrossRef]
- Ishida, N.; Inoue, T.; Miyahara, M.; Higashitani, K. Nano bubbles on a hydrophobic surface in water observed by tapping-mode atomic force microscopy. Langmuir 2000, 16, 6377. [Google Scholar] [CrossRef]










© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Zhao, X.; Pan, Y. Establishment of a Standard Method for Boundary Slip Measurement on Smooth Surfaces Based on AFM. Appl. Sci. 2019, 9, 1453. https://doi.org/10.3390/app9071453
Chen L, Zhao X, Pan Y. Establishment of a Standard Method for Boundary Slip Measurement on Smooth Surfaces Based on AFM. Applied Sciences. 2019; 9(7):1453. https://doi.org/10.3390/app9071453
Chicago/Turabian StyleChen, Lei, Xuezeng Zhao, and Yunlu Pan. 2019. "Establishment of a Standard Method for Boundary Slip Measurement on Smooth Surfaces Based on AFM" Applied Sciences 9, no. 7: 1453. https://doi.org/10.3390/app9071453
APA StyleChen, L., Zhao, X., & Pan, Y. (2019). Establishment of a Standard Method for Boundary Slip Measurement on Smooth Surfaces Based on AFM. Applied Sciences, 9(7), 1453. https://doi.org/10.3390/app9071453