Energy Storage System Controller Design for Suppressing Electromechanical Oscillation of Power Systems

Abstract
:Featured Application
Abstract
1. Introduction
2. Mechanism of Using the ESS to Suppress Electromechanical Oscillation
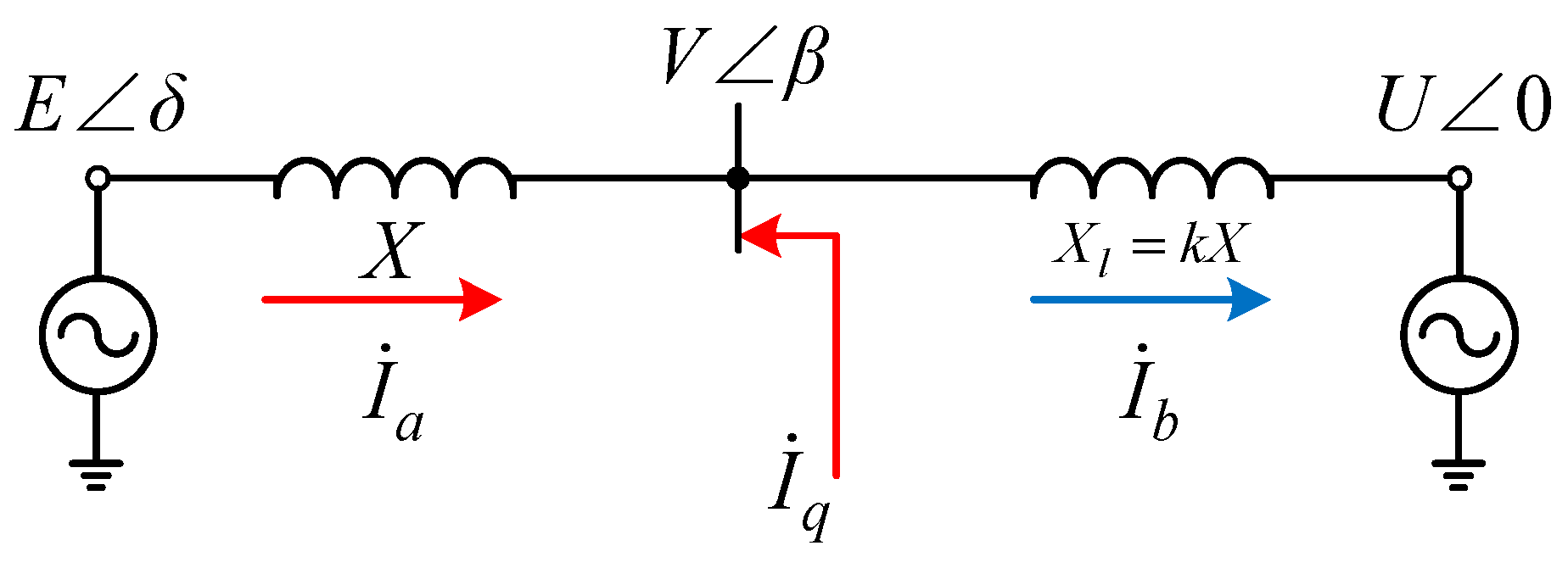
2.1. Equivalent Model of an SG Dominated Power System with ESS
2.2. Mechanism Analysis of ESS-Based Oscillation Suppression
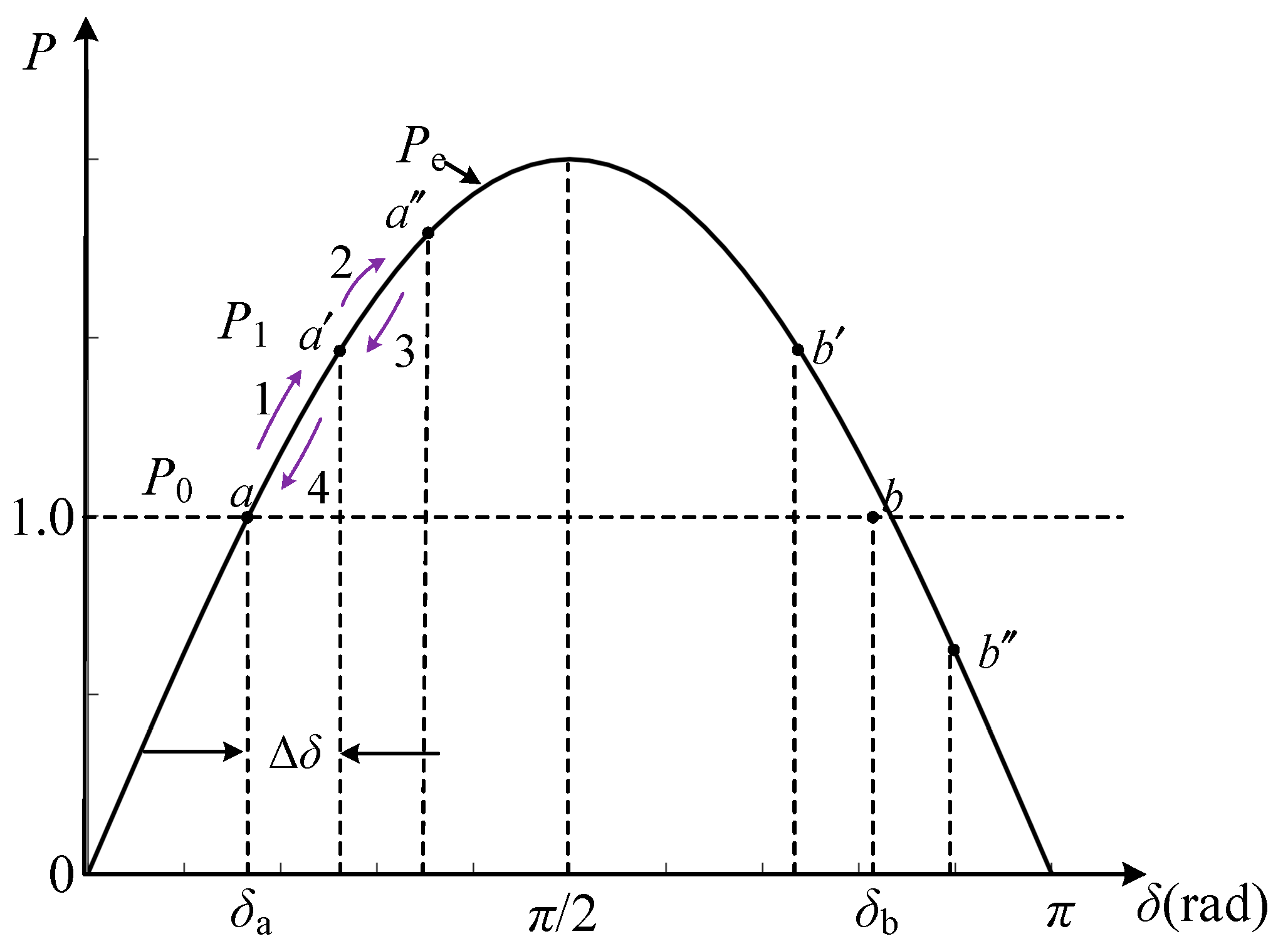
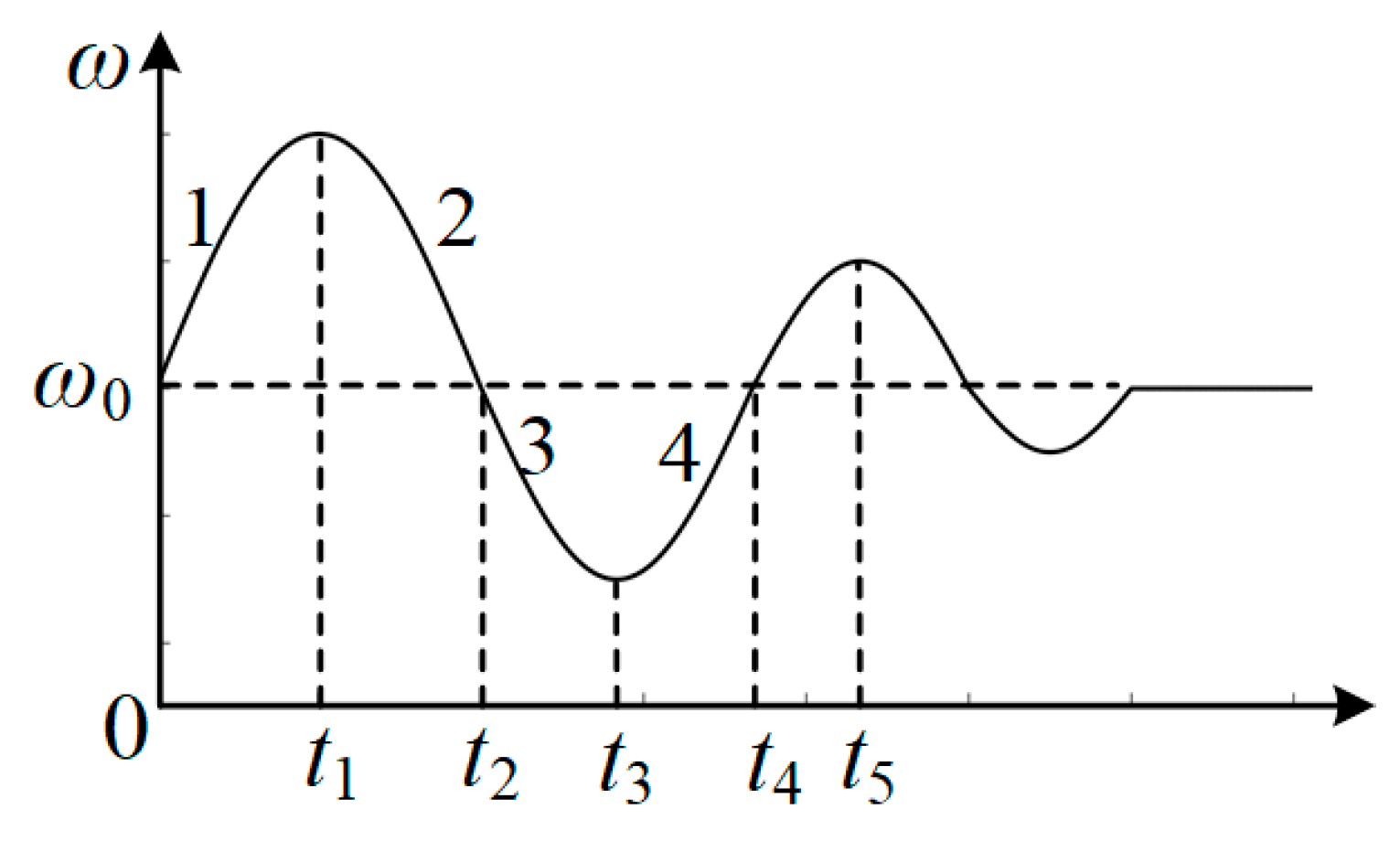
3. Analysis and Control of Electromechanical Oscillation
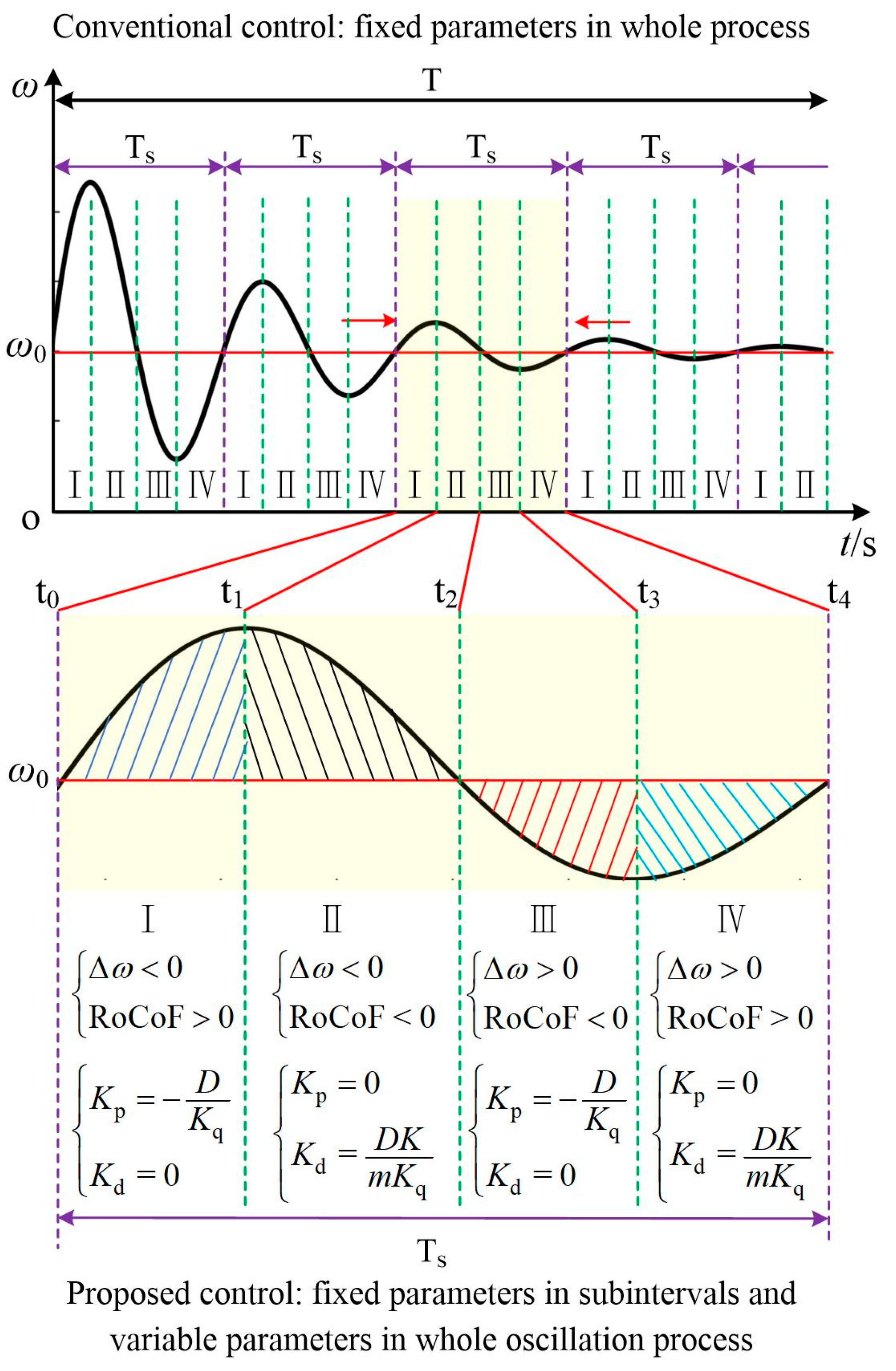
4. ESS Controller Parameter Design for Electromechanical Oscillation Suppression
4.1. ROCOF > 0
4.2. ROCOF < 0
5. Simulation Verification
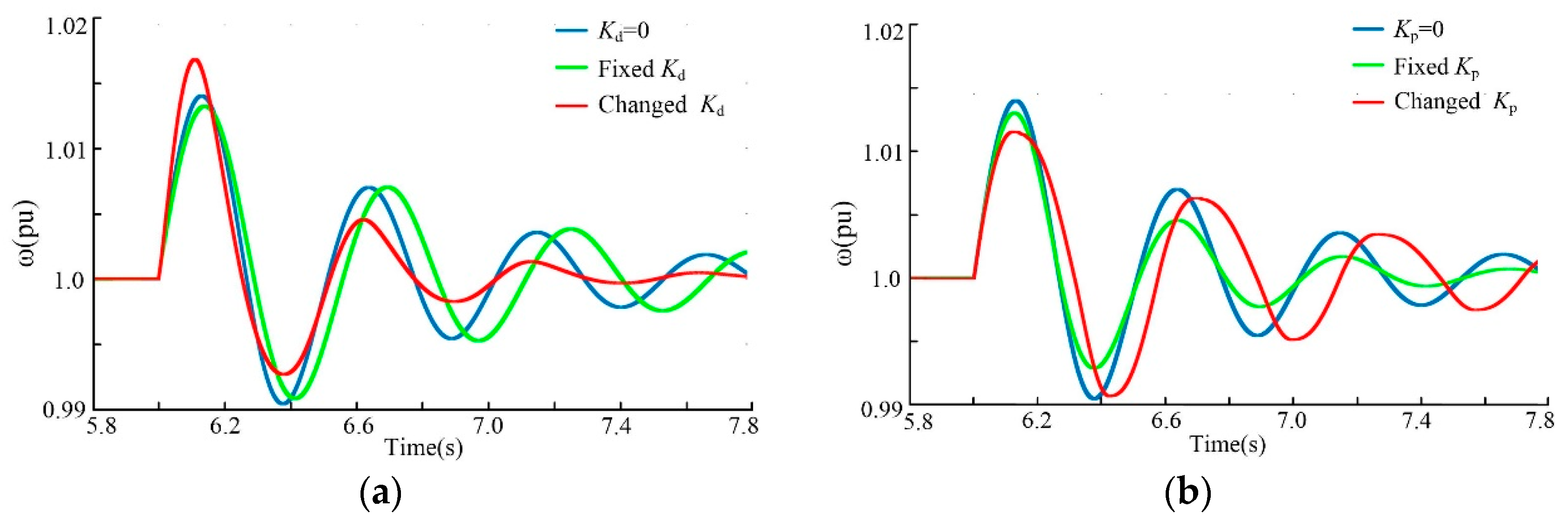
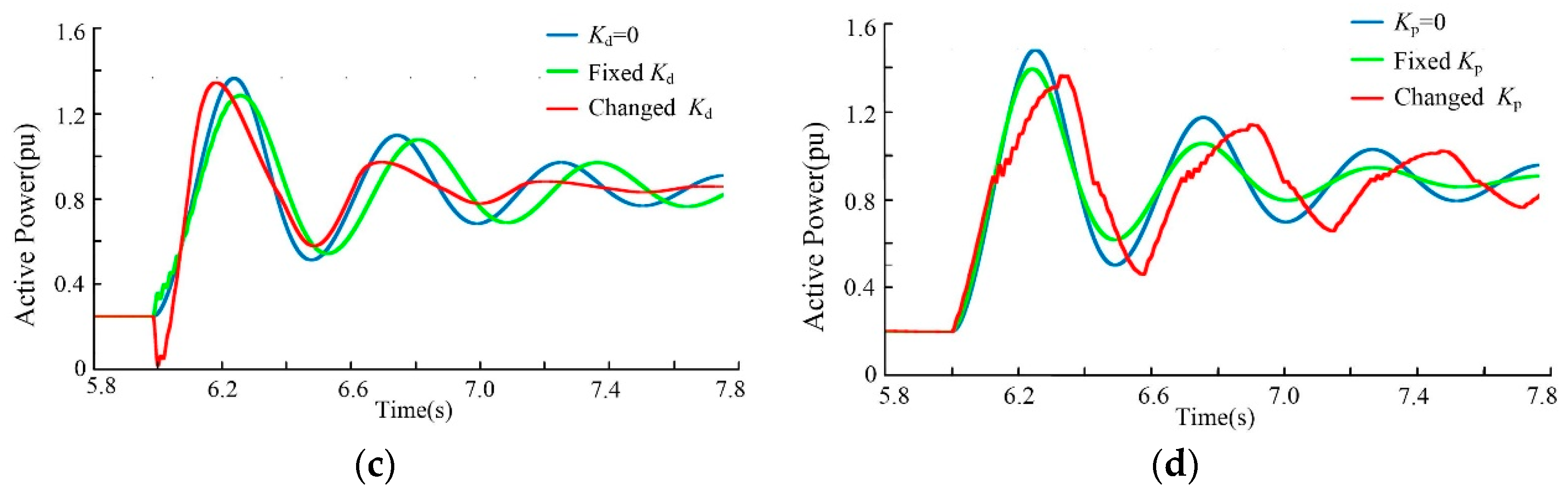
5.1. Effects of ESS Controller Parameters on System Dynamics
5.2. Independent Action of Damping Control and Inertia Control
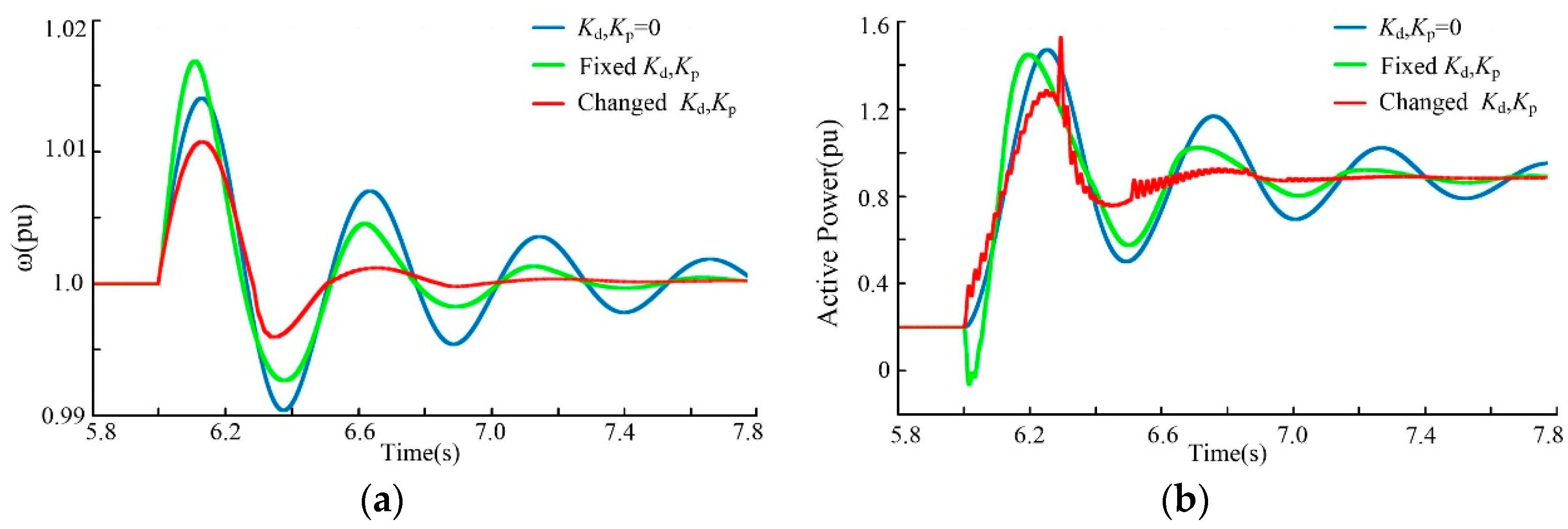
5.3. Coordinated Action of Damping Control and Inertia Control
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Shu, D.; Xie, X.; Rao, H.; Gao, X.; Jiang, Q.; Huang, Y. Sub-and super-synchronous interactions between STATCOMs and weak AC/DC transmissions with series compensations. IEEE Trans. Power Electron. 2018, 33, 7424–7437. [Google Scholar] [CrossRef]
- Wang, H.; Wu, M.; Sun, J. Analysis of low-frequency oscillation in electric railways based on small-signal modeling of vehicle-grid system in dq frame. IEEE Trans. Power Electron. 2015, 30, 5318–5330. [Google Scholar] [CrossRef]
- Zhang, J.; Chung, C.Y.; Han, Y. A novel modal decomposition control and its application to PSS design for damping interarea oscillations in power systems. IEEE Trans. Power Syst. 2012, 27, 2015–2025. [Google Scholar] [CrossRef]
- Channegowda, P.; John, V. Filter optimization for grid interactive voltage source inverters. IEEE Trans. Ind. Electron. 2010, 57, 4106–4114. [Google Scholar] [CrossRef]
- Alawasa, K.M.; Mohamed, Y.A.R.I.; Xu, W. Active mitigation of sub-synchronous interactions between PWM voltage-source converters and power networks. IEEE Trans. Power Electron. 2014, 29, 121–134. [Google Scholar] [CrossRef]
- Oudalov, A.; Chartouni, D.; Ohler, C. Optimizing a battery energy storage system for primary frequency control. IEEE Trans. Power Syst. 2007, 22, 1259–1266. [Google Scholar] [CrossRef]
- Leon, A.E.; Mauricio, J.M.; Solsona, J.A. Sub-synchronous resonance mitigation using variable speed wind energy conversion systems. IET Gener. Transm. Distrib. 2013, 7, 511–525. [Google Scholar] [CrossRef]
- Wang, L.; Xie, X.; Jiang, Q.; Liu, H.; Li, Y.; Liu, H. Investigation of SSR in practical DFIG-based wind farms connected to a series-compensated power system. IEEE Trans. Power Syst. 2015, 30, 2772–2779. [Google Scholar] [CrossRef]
- Yang, L.; Yang, G.Y.; Xu, Z.; Dong, Z.Y.; Wong, K.P.; Ma, X. Optimal controller design of a doubly-fed induction generator wind turbine system for small signal stability enhancement. IET Gener. Transm. Distrib. 2010, 4, 579–597. [Google Scholar] [CrossRef]
- Hassan, L.H.; Moghavvemi, M.; Almurib, H.A.; Muttaqi, K.M. A coordinated design of PSSs and UPFC based stabilizer using genetic algorithm. IEEE Trans. Ind. Appl. 2014, 50, 2957–2966. [Google Scholar] [CrossRef]
- Khaled, M.A.; Yasser, A.I.M. A Simple approach to damp SSR in series-compensated systems via reshaping the output admittance of a nearby VSC-based system. IEEE Trans. Ind. Electron. 2015, 62, 2673–2682. [Google Scholar]
- Mohamed, S.E.; Birgitte, B.J.; Mansour, H.A. Novel STATCOM controller for mitigating SSR and damping power system oscillations in a series compensated wind park. IEEE Trans. Power Electron. 2010, 25, 429–441. [Google Scholar]
- Mithulananthan, N.; Canizares, C.A.; Reeve, J.; Rogers, G.J. Comparison of PSS, SVC, and STATCOM controllers for damping power system oscillations. IEEE Trans. Power Syst. 2007, 18, 786–792. [Google Scholar] [CrossRef]
- Xiong, L.; Liu, X.; Wang, F.; Zhuo, F. Static synchronous generator model for investigating dynamic behaviors and stability issues of grid-tied Inverter. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016. [Google Scholar]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Chen, Y.; Zhu, M.; Yi, H. Static synchronous generator model: A new perspective to investigate dynamic characteristics and stability issues of grid-tied grid-tied PWM inverter. IEEE Trans. Power Electron. 2016, 31, 6264–6280. [Google Scholar] [CrossRef]
- Lopes, L.A. Self-tuning virtual synchronous machine: A control strategy for energy storage systems to support dynamic frequency control. IEEE Trans. Energy Convers. 2014, 29, 833–840. [Google Scholar]
- Alipoor, J.; Miura, Y.; Ise, T. Power system stabilization using virtual synchronous generator with alternating moment of inertia. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 451–458. [Google Scholar] [CrossRef]
- Alipoor, J.; Miura, Y.; Ise, T. Distributed generation grid integration using virtual synchronous generator with adoptive virtual inertia. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition (ECCE), Denver, CO, USA, 15–19 September 2013. [Google Scholar]
- Xiong, L.; Wang, D. Research on suppression mechanism of STATCOM on power oscillations. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017-ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 806–811. [Google Scholar]
- Xiong, L.; Xu, Z.; Xiu, L. Energy Storage System Control for Electromechanical Oscillation Mitigation and Its Impact on Inertia and Damping of Power System. In Proceedings of the 2018 IEEE 4th Southern Power Electronics Conference (SPEC), Singapore, 10–13 December 2018; pp. 1–5. [Google Scholar]
- Xiong, L.; Zhuo, F.; Liu, X.; Zhu, M.; Chen, Y.; Wang, F. Research on fast open-loop phase locking scheme for three-phase unbalanced grid. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1672–1676. [Google Scholar]
- Xiong, L.; Zhuo, F.; Wang, F.; Liu, X.; Zhu, M.; Yi, H. A Novel Fast Open-loop Phase Locking Scheme Based on Synchronous Reference Frame for Three-phase Non-ideal Power Grids. J. Power Electron. 2016, 16, 1513–1525. [Google Scholar] [CrossRef]
- Fang, J.; Li, H.; Tang, Y.; Blaabjerg, F. On the inertia of future more-electronics power systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 1–19. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Utility voltage U | 10.5 kV/50 Hz | ESS DC-side voltage Vdc | 800 V |
| Line impedance Z | 0.02 + j0.5 Ω | ESS location k | 1 |
| Frequency deviation threshold K | 0.5 Hz | ROCOF threshold m | 0.1 Hz/ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Li, G.; Tang, W.; Hu, A.; Zhang, D.; Wu, Y. Energy Storage System Controller Design for Suppressing Electromechanical Oscillation of Power Systems. Appl. Sci. 2019, 9, 1329. https://doi.org/10.3390/app9071329
Yang B, Li G, Tang W, Hu A, Zhang D, Wu Y. Energy Storage System Controller Design for Suppressing Electromechanical Oscillation of Power Systems. Applied Sciences. 2019; 9(7):1329. https://doi.org/10.3390/app9071329
Chicago/Turabian StyleYang, Bo, Guanjun Li, Wencheng Tang, Anping Hu, Donghui Zhang, and Yongbin Wu. 2019. "Energy Storage System Controller Design for Suppressing Electromechanical Oscillation of Power Systems" Applied Sciences 9, no. 7: 1329. https://doi.org/10.3390/app9071329
APA StyleYang, B., Li, G., Tang, W., Hu, A., Zhang, D., & Wu, Y. (2019). Energy Storage System Controller Design for Suppressing Electromechanical Oscillation of Power Systems. Applied Sciences, 9(7), 1329. https://doi.org/10.3390/app9071329