Nonlinear and Non-Stationary Detection for Measured Dynamic Signal from Bridge Structure Based on Adaptive Decomposition and Multiscale Recurrence Analysis

Abstract
1. Introduction
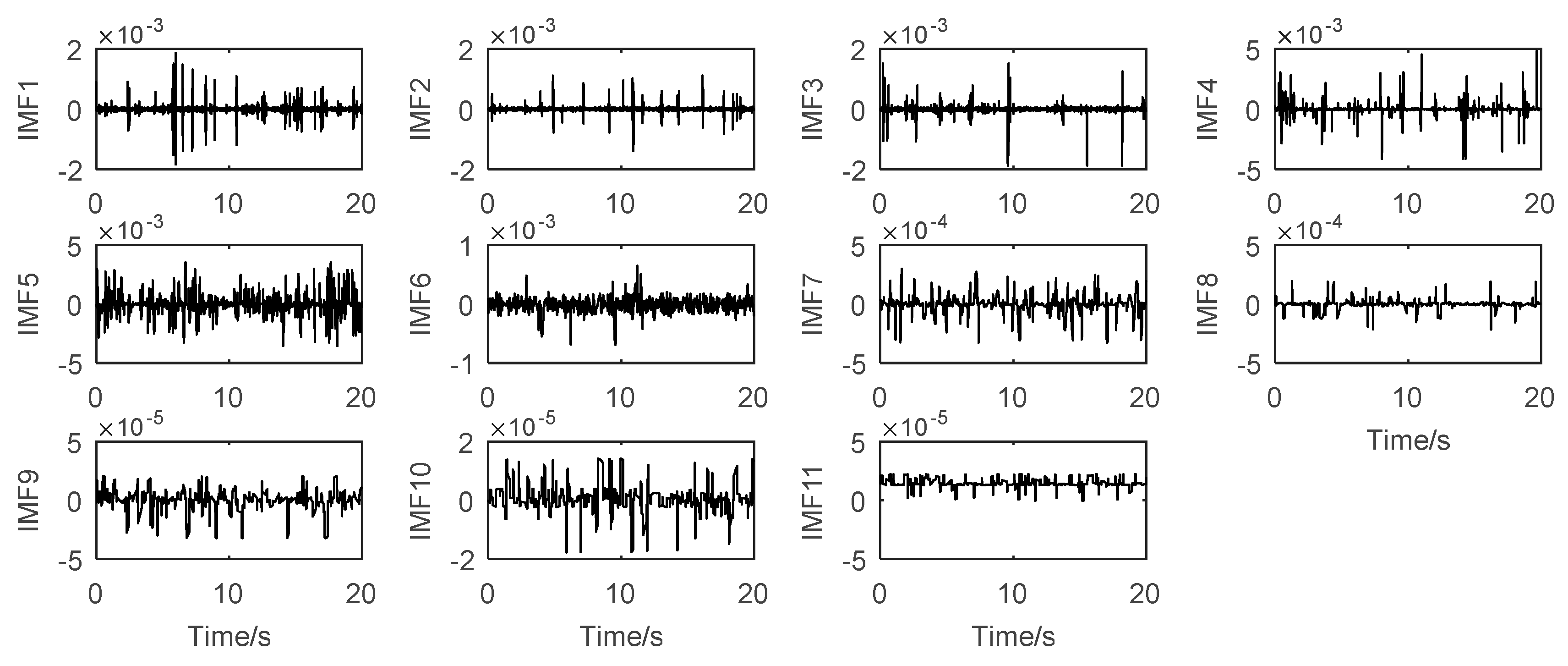
2. Improved Ensemble Empirical Mode Decomposition
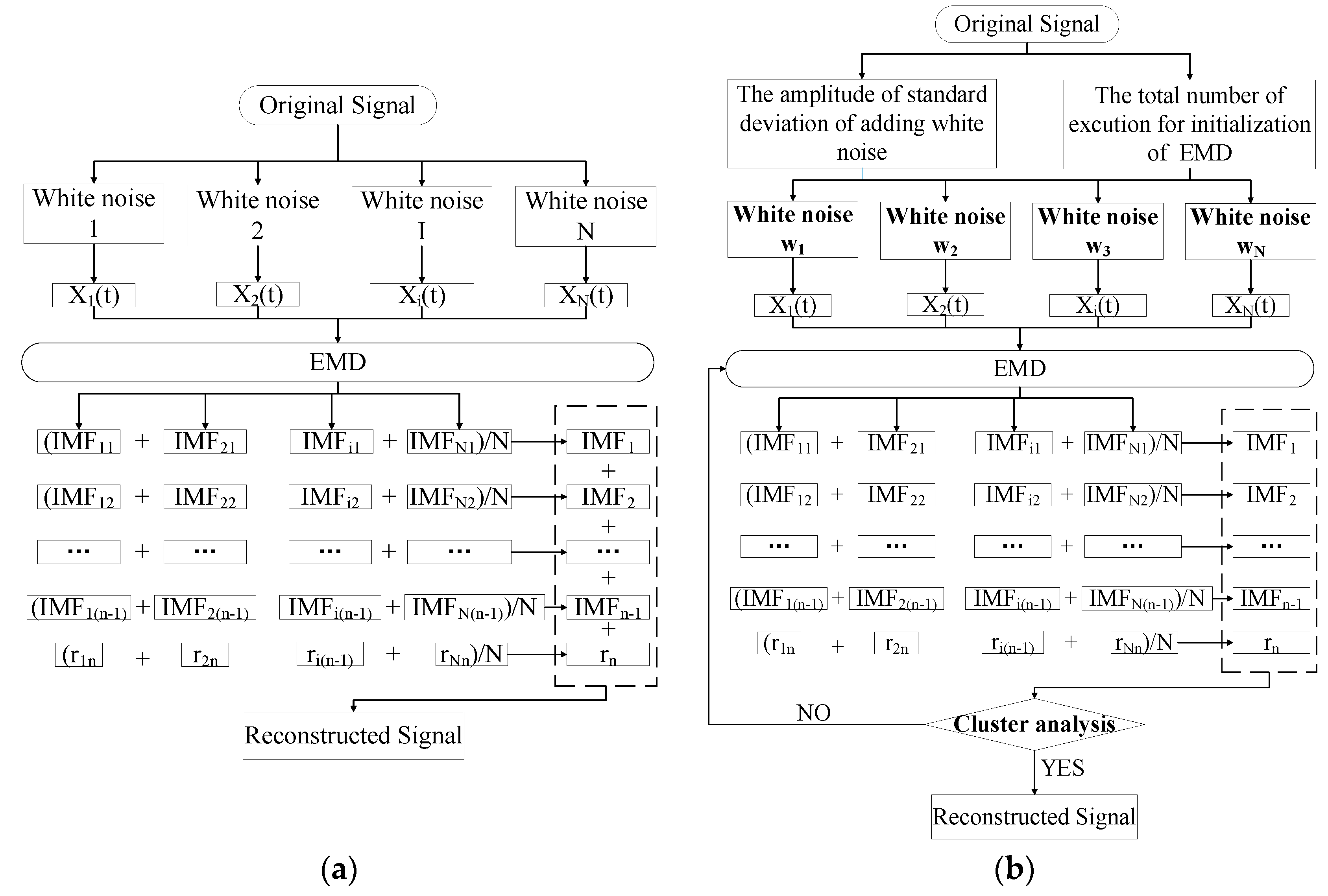
2.1. Ensemble Empirical Mode Decomposition
- Generate , where is the original signal and are different realizations of added white noise.
- Each is fully decomposed by EMD and get their modes , where indicates the modes.
- Assign as the k-th mode of , obtained as the average of the corresponding :
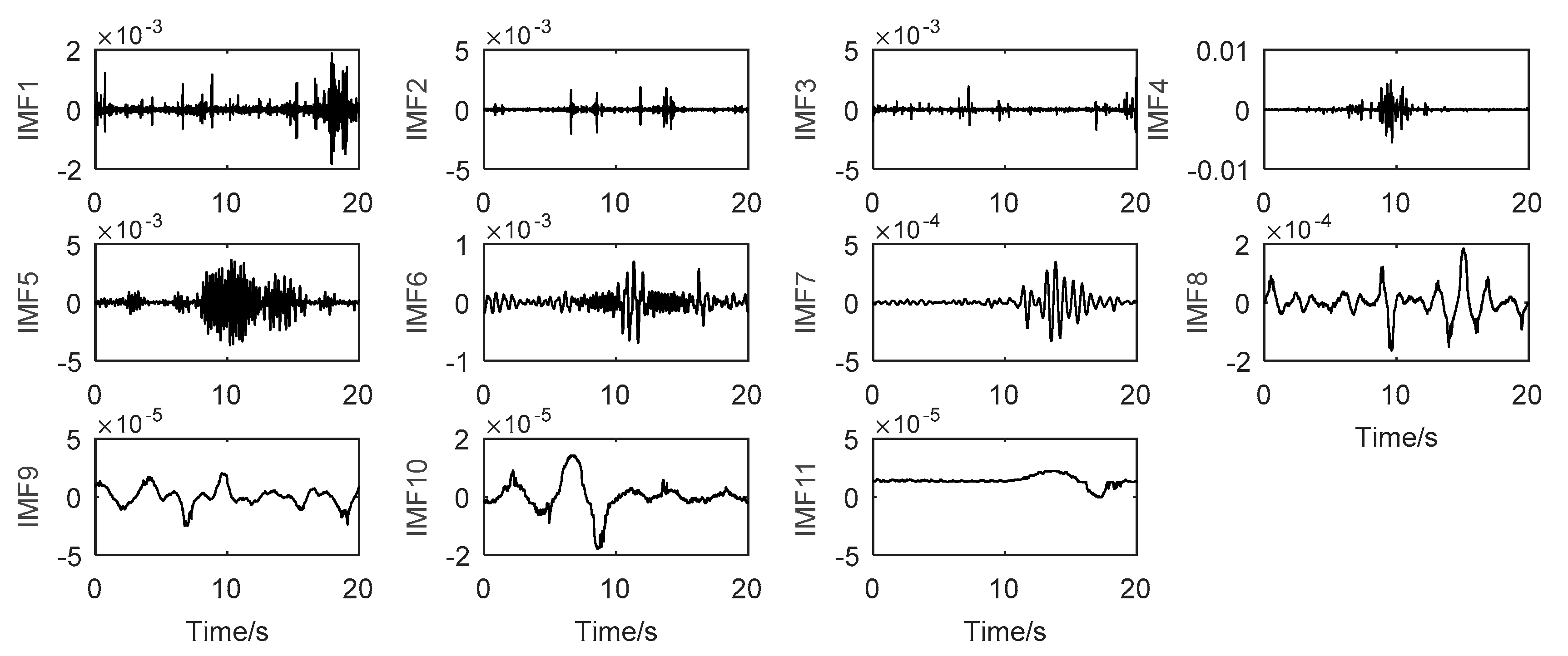
2.2. Improved Ensemble Empirical Mode Decomposition
- Add N Gaussian white noise in signal :
- Obtain the first residue and the first mode by EEMD:
- Perform EMD on Gaussian white noise and generate the IMFs and residue of :where is the j-th mode of decomposed by the EMD method and the total number is m. is the residue of decomposed by the EMD method.
- Take as the signal to be decomposed, add and generate .
- Perform EMD on and obtain the of signal by averaging the N IMFs.
- For , calculate the k-th residue.
- Decompose , , until their first EMD mode and define the (k+1)-th mode using the equation below.
- Go to step 6 for the next k.
- Step 6 to 8 are performed until the obtained residue is no longer feasible to be decomposed (the residue does not have at least two extrema). The final residue is expressed using the equation below.where K is the total number of modes.
- Let us define that each IMF contains two parts (i.e., the useful characteristic signal and noise signal), and set which stands for the characteristic signal component, and stands for the noise component. The cross-correlation function between different IMFs is shown below.
- It is known that corresponding IMFs of different series of noise have no correlation with each other. Then, we can set and Equation (11) can be expressed by the formula below.
- Normalized cross correlation coefficient is introduced to quantify the correlation between two different IMFs, which can be expressed by the equation below.
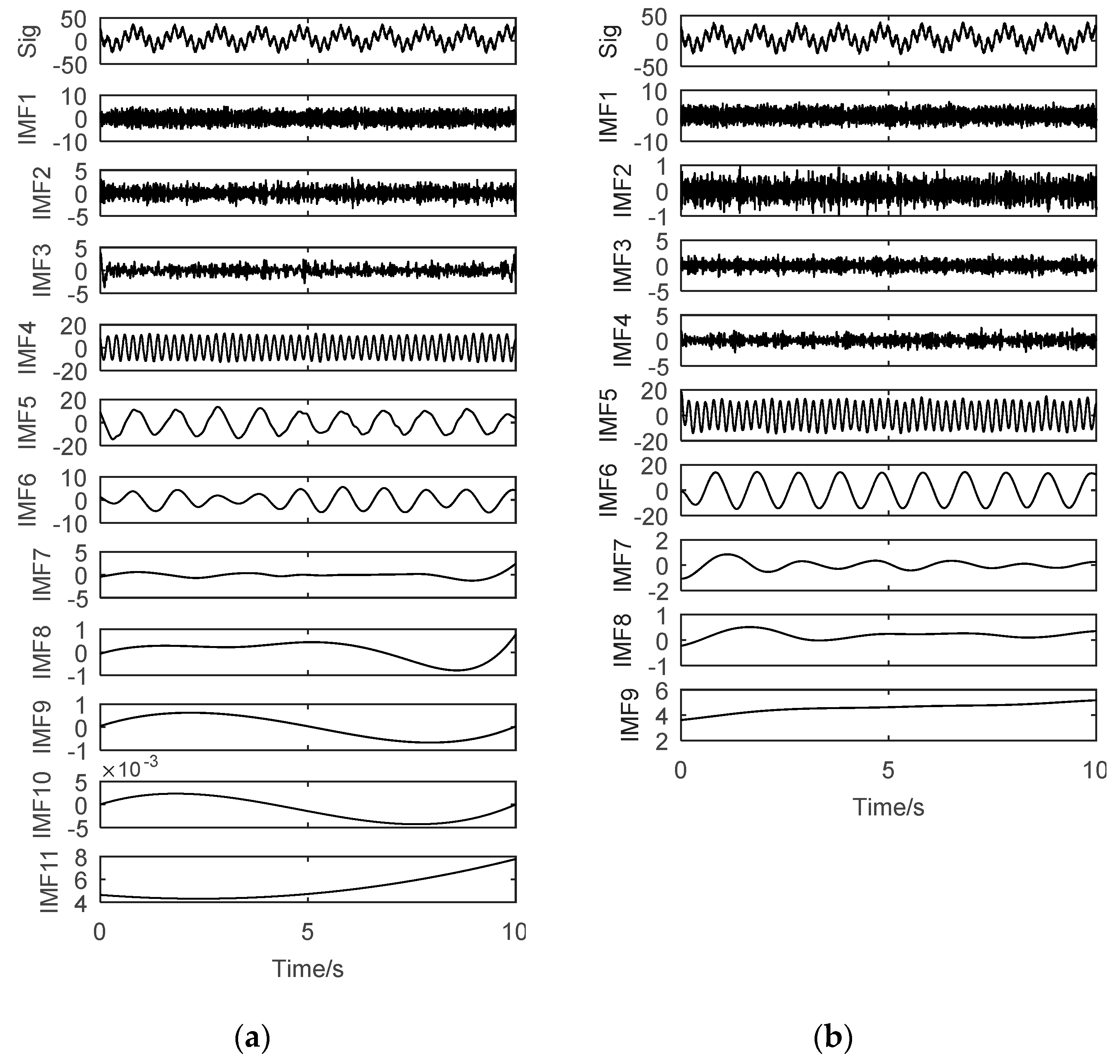
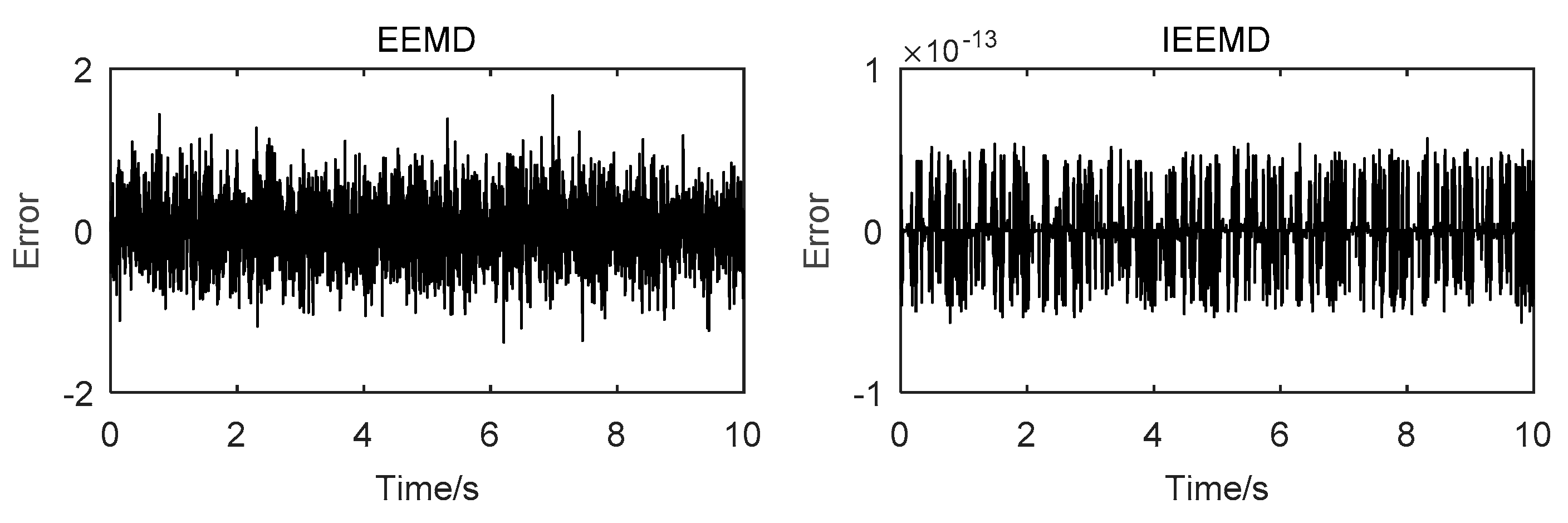
2.3. Testing and Verification
3. Data-Driven Recurrence Quantification Analysis (RQA)
3.1. Brief Description on Recurrence Plot (RP) and RQA
3.2. Data-Driven RQA
3.2.1. Improved RQA Method
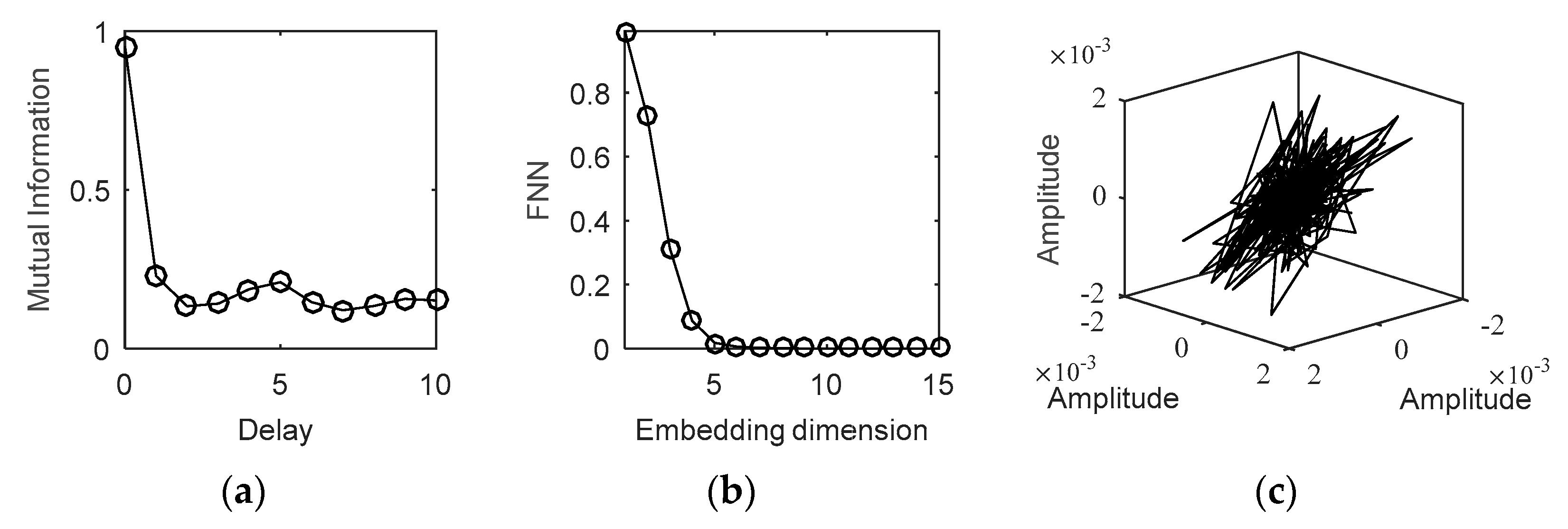
- Set the initial value of recurrence threshold and target recurrence rate vector , the value of can be set up based on the equation [39]: , where is a delay matrix consisting of embedding the dimension and delay time.
- Set and construct a recurrence matrix based on Equation (16). Obtain the value based on Equation (18).
- If and satisfy the set tolerance, record the target threshold value . If not, the solution process is performed iteratively until the allowable error is satisfied.
- Repeat step 2 and step 3 until the threshold vector corresponding to is obtained.
- According to every value of , the RQA is performed to obtain the RQA measure vector .
3.2.2. Selection of Other RQA Parameters and Surrogate Techniques
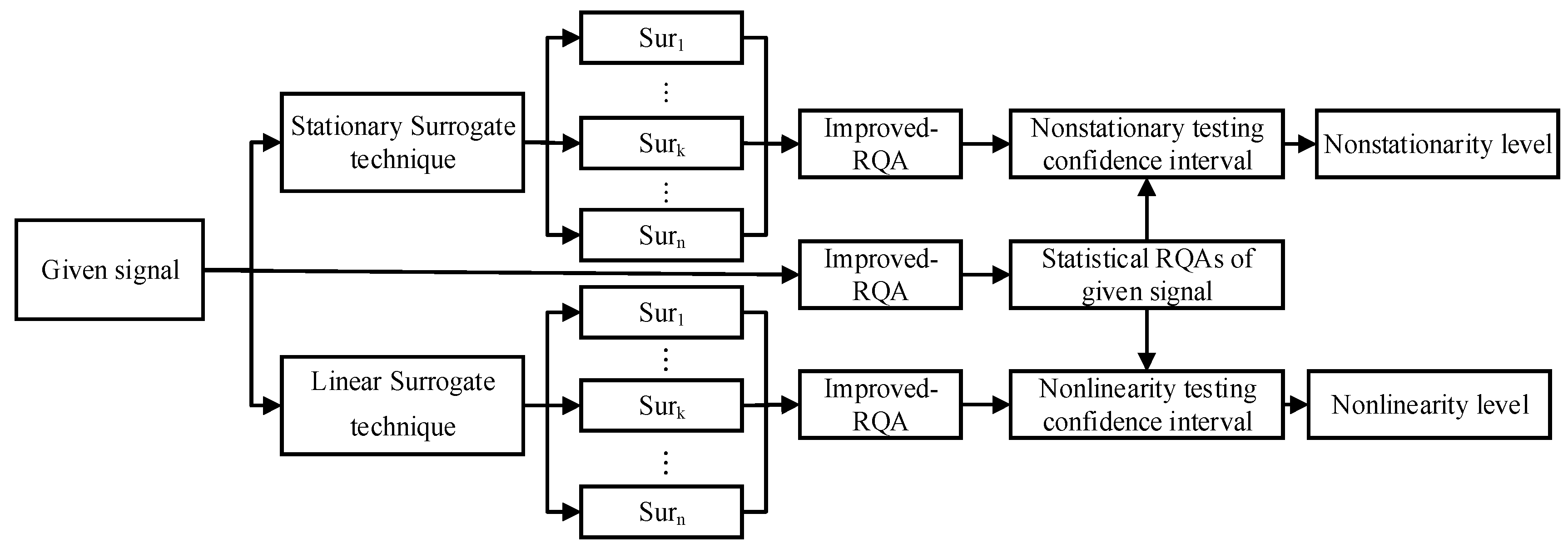
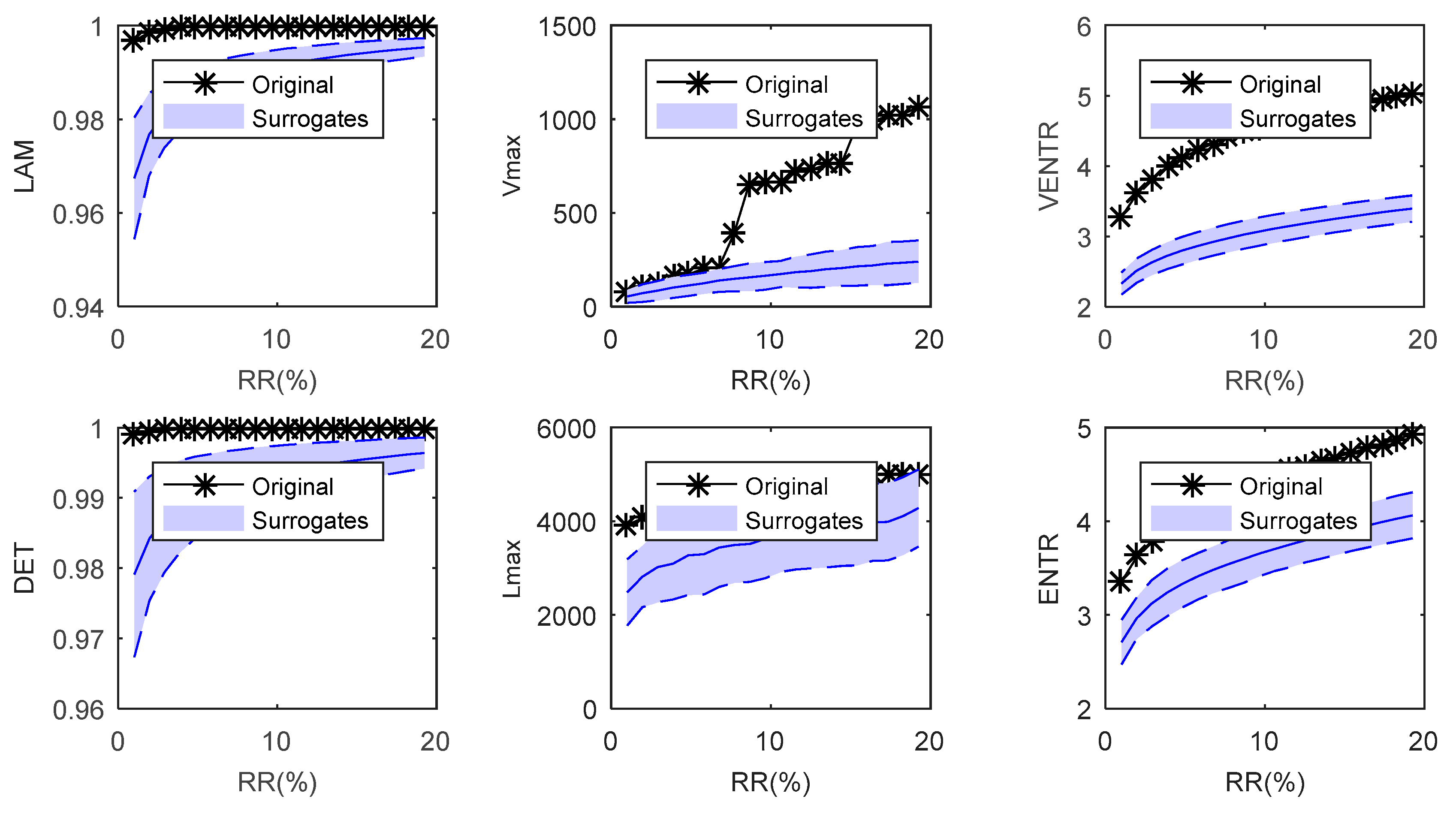
3.2.3. The Statistical RQA Measures
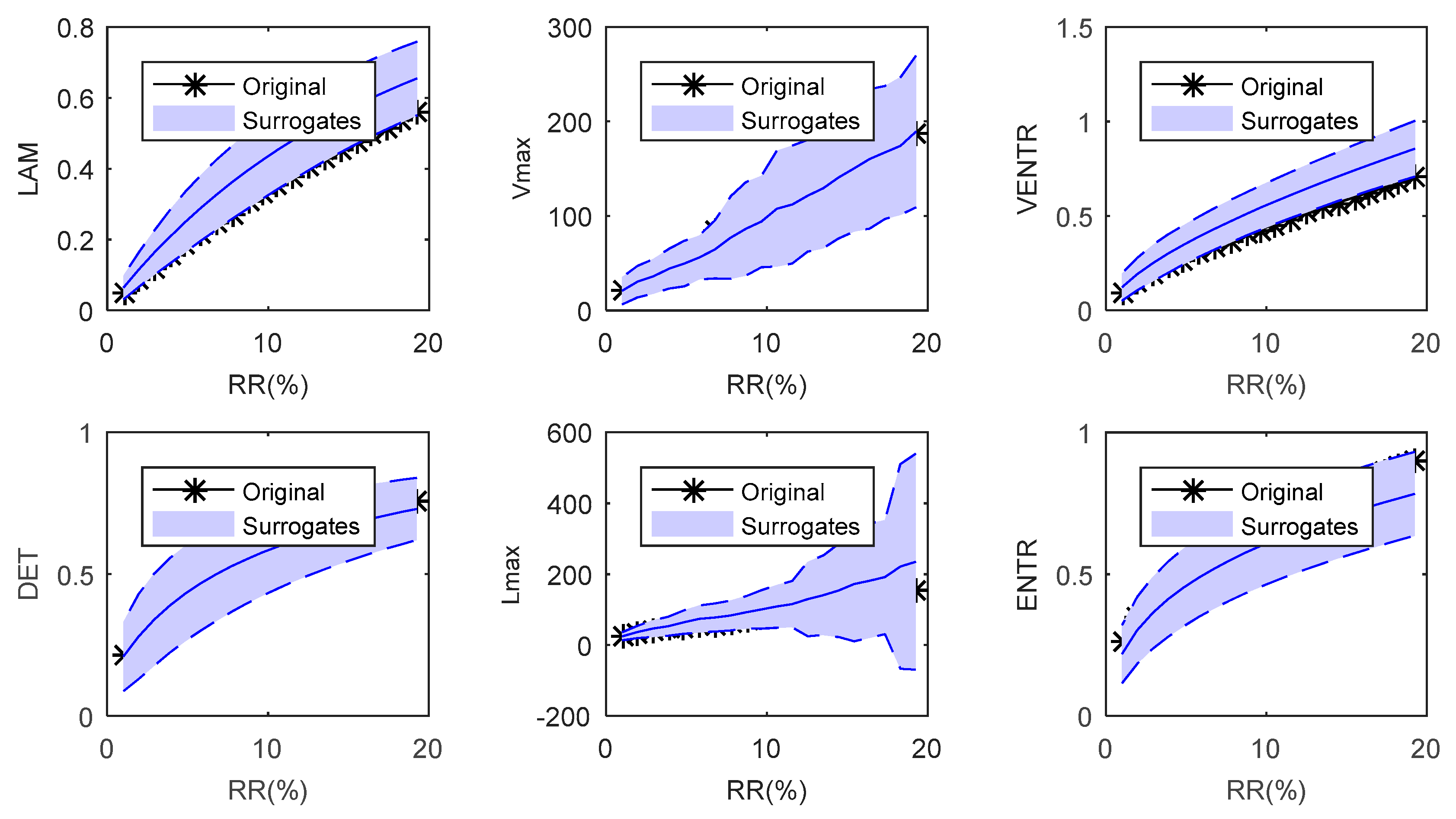
- The stationary surrogate technique and linear surrogate technique are adopted separately to generate N groups of stationary and linear surrogate signals.
- Improved-RQA is carried out for each group of stationary and linear signals and the RQA measure matrix corresponding to the target recurrence rate are obtained. Each column of the RQA measure matrix represents a set of index vectors of the surrogate signals.
- Calculate the mean and the variance of the RQA measures to obtain the non-stationarity testing and nonlinearity testing confidence interval , .
- Improved-RQA analysis is carried out for the original given signal. Considering the strong noise test environment of the bridge structure, the noise influence factor is introduced to avoid the strong noise submerging the signal and cover up of the real recursive topology of the signal. The mathematical expression of the RQA measures is as follows.where is the noise influence factor. if the given signal is pure. Otherwise, is selected according to the SNR level.
- If each element of the given signal is within the confidence interval, the null hypothesis will be accepted. The nonstationary element and the nonlinear element . Otherwise, , . Let the total size of the RQAs be N , the number of the nonstationary elements and nonlinear elements, which are within the confidence interval, be ,. When the ratios of , are greater than the threshold , the null hypothesis is accepted. Otherwise, the null hypothesis is rejected. Let the binary non-stationarity statistical RQA measure be SNS and nonlinearity statistical RQA measure index be SNL. SNS and SNL can be calculated as follows.
- Let the median value of RQAs be RQAm, then the element pair (RQAm,SNS) and (RQAm,SNL) will be set up as the statistical nonstationary and nonlinear test measures.
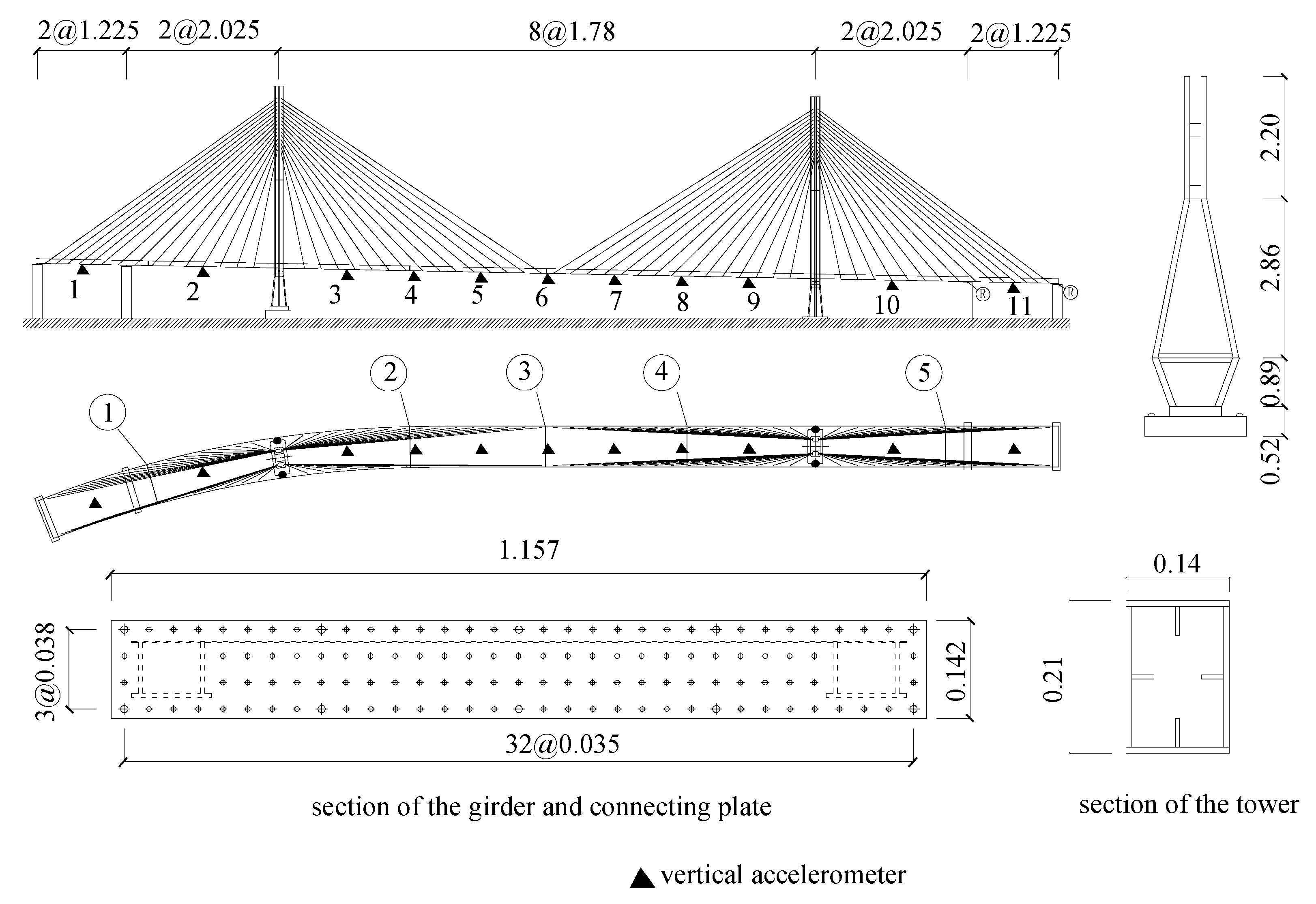
4. Multiscale Recurrence Analysis of a Model Cable-Stayed Bridge
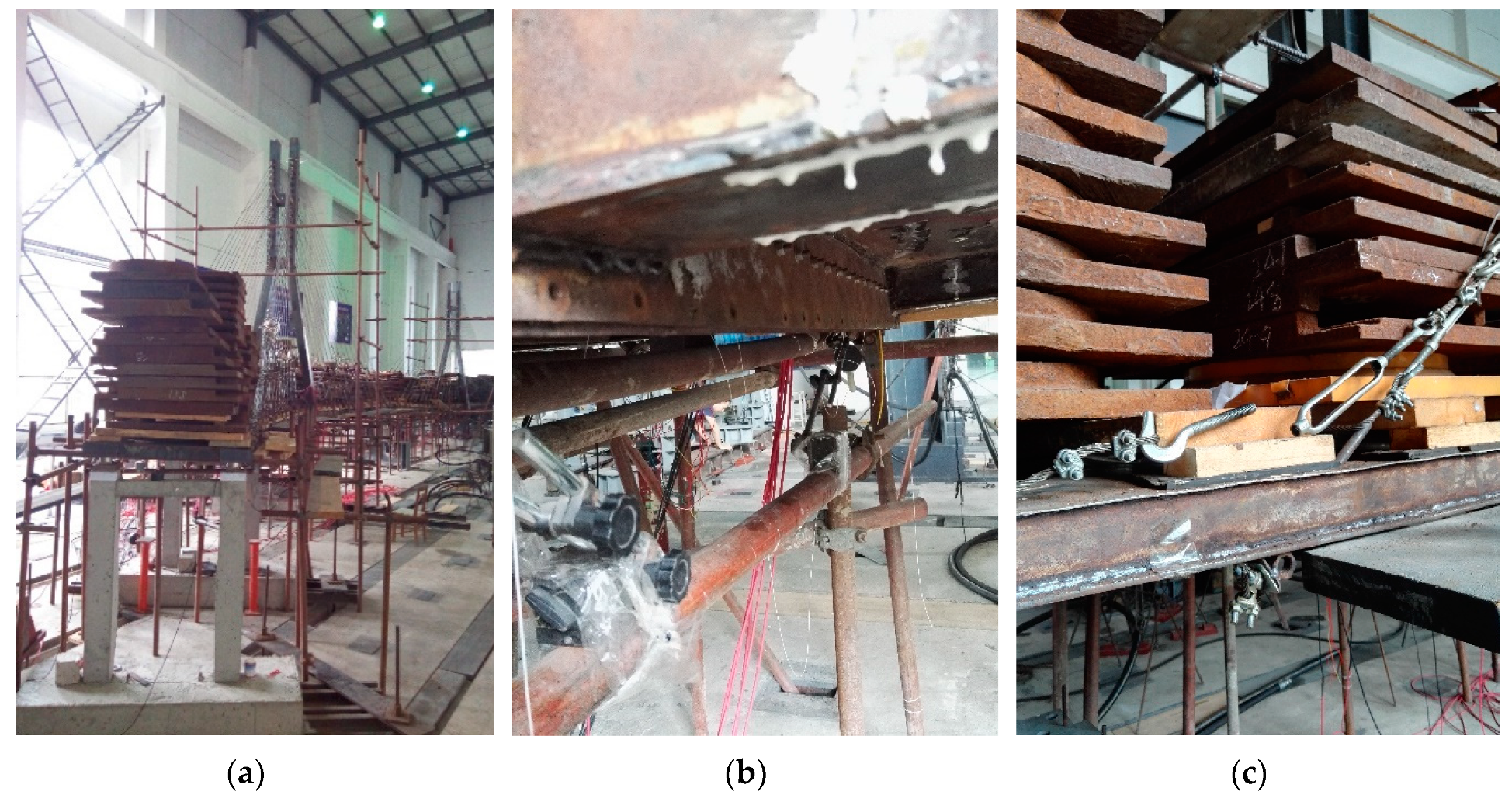
Test Description
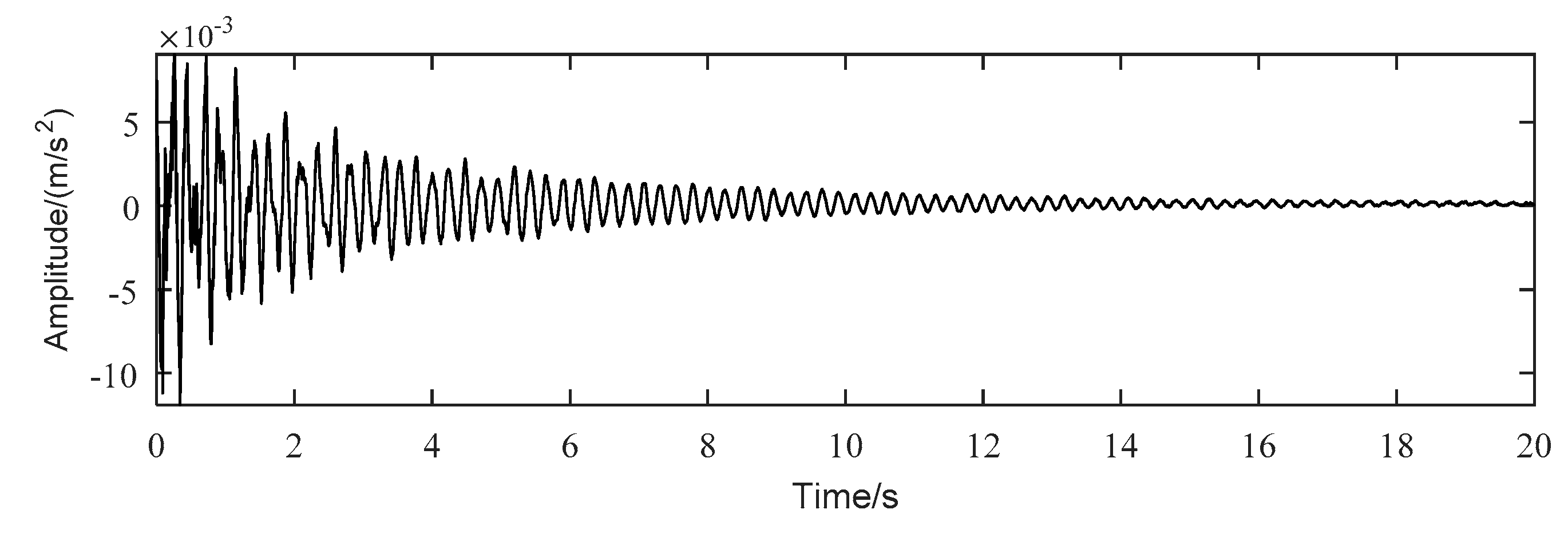
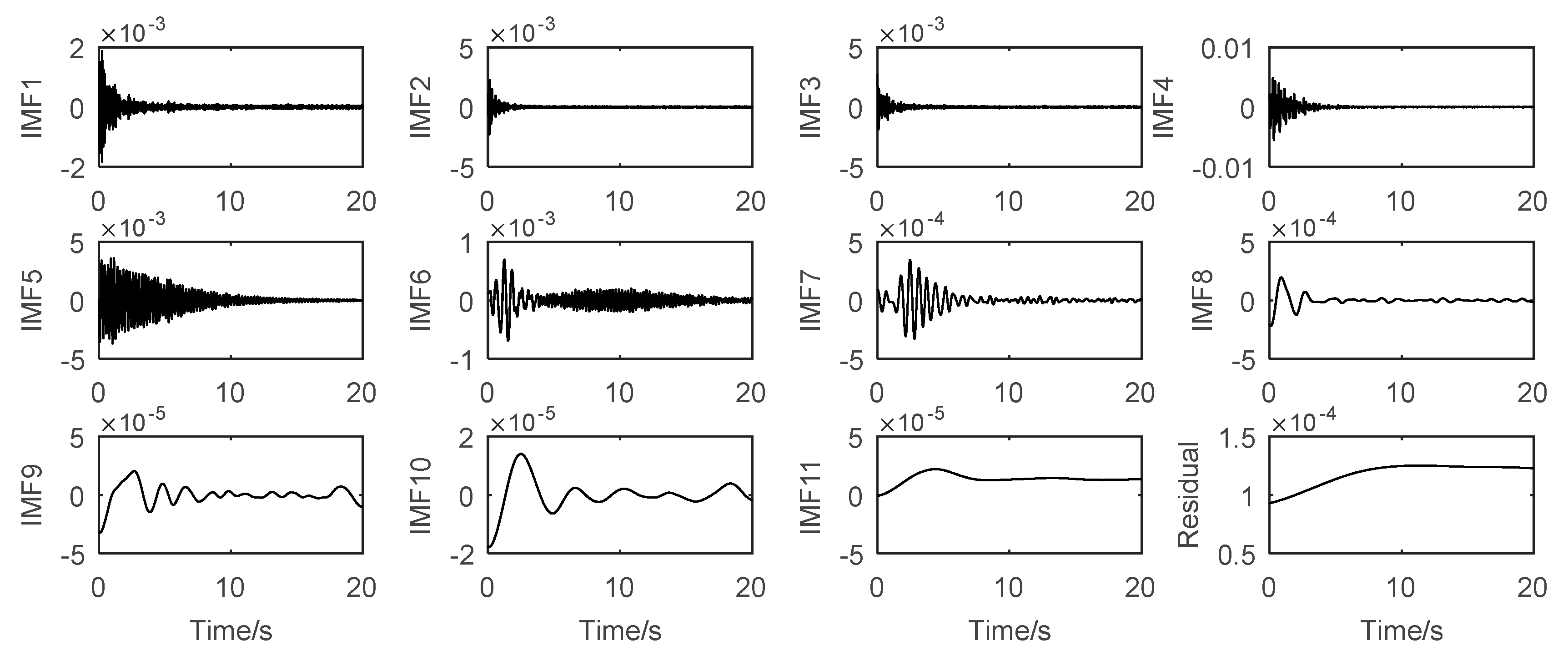
5. Results and Discussions
6. Conclusions
7. Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Chen, Y.; Yang, H. Multiscale recurrence analysis of long-term nonlinear and nonstationary time series. Chaos Solitons Fractals Interdiscip. J. Nonlinear Sci. Nonequilibrium Complex Phenom. 2012, 45, 978–987. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Erazo, K. Structural monitoring and identification of civil infrastructure in the United States. Struct. Monit. Maint. 2016, 3, 51–69. [Google Scholar] [CrossRef]
- Marwan, N.; Romano, M.C.; Thiel, M.; Kurths, J. Recurrence plots for the analysis of complex systems. Phys. Rep. 2007, 438, 237–329. [Google Scholar] [CrossRef]
- Eckmann, J.P.; Kamphorst, S.O.; Ruelle, D. Recurrence Plots of Dynamical Systems. World Sci. Ser. Nonlinear Sci. Ser. A 1995, 16, 441–446. [Google Scholar]
- Webber, C.L., Jr.; Zbilut, J.P. Recurrence quantifications: Feature extractions from recurrence plots. Int. J. Bifurc. Chaos 2007, 17, 3467–3475. [Google Scholar] [CrossRef]
- Webber, C.L., Jr.; Ioana, C.; Marwan, N. Recurrence Plots and Their Quantifications: Expanding Horizons. In Springer Proceedings in Physics; Springer International Publishing: New York, NY, USA, 2016. [Google Scholar]
- Schinkel, S.; Marwan, N.; Kurths, J. Order patterns recurrence plots in the analysis of ERP data. Cogn. Neurodyn. 2007, 1, 317–325. [Google Scholar] [CrossRef]
- Romano, M.C.; Thiel, M.; Kurths, J.; von Bloh, W. Multivariate recurrence plots. Phys. Lett. A 2004, 330, 214–223. [Google Scholar] [CrossRef]
- Lange, H.; Boese, S. Recurrence Quantification and Recurrence Network Analysis of Global Photosynthetic Activity. In Recurrence Quantification Analysis; Springer International Publishing: New York, NY, USA, 2015; pp. 349–374. [Google Scholar]
- Hoshi, R.A.; Pastre, C.M.; Vanderlei, L.C.M.; Godoy, M.F. Assessment of Heart Rate Complexity Recovery from Maximal Exercise Using Recurrence Quantification Analysis. In Recurrence Plots and Their Quantifications: Expanding Horizons; Springer: Cham, Switzerland, 2016; pp. 157–168. [Google Scholar]
- Hirata, Y.; Oda, A.; Ohta, K.; Aihara, K. Three-dimensional reconstruction of single-cell chromosome structure using recurrence plots. Sci. Rep. 2016, 6, 34982. [Google Scholar] [CrossRef] [PubMed]
- Tibau, E.; Soriano, J. Analysis of spontaneous activity in neuronal cultures through recurrence plots: Impact of varying connectivity. Eur. Phys. J. Spec. Top. 2018, 227, 999–1014. [Google Scholar]
- Bastos, J.A.; Caiado, J. Recurrence quantification analysis of global stock markets. Phys. A Stat. Mech. Appl. 2012, 390, 1315–1325. [Google Scholar] [CrossRef]
- Tzagkarakis, G.; Dionysopoulos, T. Restoring Corrupted Cross-Recurrence Plots Using Matrix Completion: Application on the Time-Synchronization between Market and Volatility Indexes. In Recurrence Plots and Their Quantifications: Expanding Horizons; Springer: Cham, Switzerland, 2016; pp. 241–263. [Google Scholar]
- Garcia-Ochoa, E.; Corvo, F. Using recurrence plot to study the dynamics of reinforcement steel corrosion. Prot. Met. Phys. Chem. Surf. 2015, 51, 716–724. [Google Scholar] [CrossRef]
- Savari, C.; Kulah, G.; Koksal, M.; Sotudeh-Gharebagh, R.; Zarghami, R.; Mostoufi, N. Monitoring of liquid sprayed conical spouted beds by recurrence plots. Powder Technol. 2017, 316, 148–156. [Google Scholar] [CrossRef]
- Yang, D.; Ren, W.X.; Hu, Y.D.; Li, D. Selection of optimal threshold to construct recurrence plot for structural operational vibration measurements. J. Sound Vib. 2015, 349, 361–374. [Google Scholar] [CrossRef]
- Kecik, K.; Ciecielag, K.; Zaleski, K. Damage detection of composite milling process by recurrence plots and quantifications analysis. Int. J. Adv. Manuf. Technol. 2017, 89, 133–144. [Google Scholar] [CrossRef]
- Zbilut, J.P.; Webber, C.L., Jr. Recurrence Quantification Analysis. In Wiley Encyclopedia of Biomedical Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Catone, M.C.; Faggini, M. Recurrence Analysis: Method and Applications. In Data Science and Social Research; Springer International Publishing: New York, NY, USA, ; 2017. [Google Scholar]
- Amezquita-Sanchez, J.P.; Adeli, H. Signal processing techniques for vibration-based health monitoring of smart structures. Arch. Comput. Methods Eng. 2016, 23, 1–15. [Google Scholar] [CrossRef]
- Ding, H.; Crozier, S.; Wilson, S. Optimization of Euclidean distance threshold in the application of recurrence quantification analysis to heart rate variability studies. Chaos Solitons Fractals 2008, 38, 1457–1467. [Google Scholar] [CrossRef]
- Beim Graben, P.; Sellers, K.K.; Fröhlich, F.; Hutt, A. Optimal estimation of recurrence structures from time series. Europhys. Lett. 2016, 114, 38003. [Google Scholar] [CrossRef]
- Xiong, H.; Shang, P.; Bian, S. Detecting intrinsic dynamics of traffic flow with recurrence analysis and empirical mode decomposition. Phys. A Stat. Mech. Appl. 2017, 474, 70–84. [Google Scholar] [CrossRef]
- Gao, Q.; Li, G.X.; Tian, X.; Sun, J. A novel traffic prediction method based on IMF. In Advanced Materials Research; Trans Tech Publications: Zurich, Switzerland, 2012; Volume 490, pp. 1421–1425. [Google Scholar]
- Yan, R.; Chen, X.; Mukhopadhyay, S.C. Advanced Signal Processing for Structural Health Monitoring. In Structural Health Monitoring; Springer: Cham, Switzerland, 2017; pp. 1–11. [Google Scholar]
- Liu, T.; Luo, Z.; Huang, J.; Yan, S. A Comparative Study of Four Kinds of Adaptive Decomposition Algorithms and Their Applications. Sensors 2018, 18, 2120. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Keylock, C.J. Multifractal surrogate-data generation algorithm that preserves pointwise Hölder regularity structure, with initial applications to turbulence. Phys. Rev. E 2017, 95, 032123. [Google Scholar] [CrossRef]
- SHAN, D.; LI, Q.; KHAN, I. Adaptive Signal Decomposition and Reconstruction for Bridge Structural Dynamic Testing. In IABSE Symposium Report; International Association for Bridge and Structural Engineering: Zurich, Switzerland, 2016; Volume 106, pp. 415–423. [Google Scholar]
- Huang, N.E.; Shen, S.S.P. Hilbert-Huang transform and its applications. In Hilbert-Huang Transform and Its Applications; World Scientific: Singapore city, Singapore, 2005. [Google Scholar]
- Rabie, T. Robust Estimation Approach for Blind Denoising; IEEE Press: Piscataway, NJ, USA, 2005. [Google Scholar]
- Eckmann, J.P.; Kamphorst, S.O.; Ruelle, D. Recurrence Plots of Dynamical Systems. Europhys. Lett. 1987, 4, 973–977. [Google Scholar] [CrossRef]
- Marwan, N.; Wessel, N.; Meyerfeldt, U.; Kurths, J. Recurrence-plot-based measures of complexity and their application to heart-rate-variability data. Phys. Rev. E 2002, 66, 026702. [Google Scholar] [CrossRef] [PubMed]
- Zbilut, J.P.; Webber, C.L., Jr. Embeddings and delays as derived from quantification of recurrence plots. Phys. Lett. A 1992, 171, 199–203. [Google Scholar] [CrossRef]
- Webber, C.L., Jr.; Zbilut, J.P. Dynamical assessment of physiological systems and states using recurrence plot strategies. J. Appl. Physiol. 1994, 76, 965–973. [Google Scholar] [CrossRef] [PubMed]
- Zbilut, J.P.; Giuliani, A.; Webber, C.L., Jr. Recurrence quantification analysis and principal components in the detection of short complex signals. Phys. Lett. A 1998, 237, 131–135. [Google Scholar] [CrossRef]
- Strogatz, S. Synchronization: A Universal Concept in Nonlinear Sciences. Phys. Today 2003, 56, 47. [Google Scholar] [CrossRef]
- Gautama, T.; Mandic, D.P.; Van Hulle, M.M. The delay vector variance method for detecting determinism and nonlinearity in time series. Phys. D Nonlinear Phenom. 2004, 190, 167–176. [Google Scholar] [CrossRef]
- Carrión, A.; Miralles, R. New Insights for Testing Linearity and Complexity with Surrogates: A Recurrence Plot Approach. In Recurrence Plots and Their Quantifications: Expanding Horizons; Springer: Cham, Switzerland, 2016; pp. 91–112. [Google Scholar]
- Tong, H. Non-Linear Time Series Analysis; Cambridge University Press: Oxford, UK, 2011. [Google Scholar]
- Kennel, M.B.; Brown, R.; Abarbanel, H.D.I. Determining embedding dimension for phase-space reconstruction using a geometrical construction. Phys. Rev. A 1992, 45, 3403. [Google Scholar] [CrossRef]
- Theiler, J.; Eubank, S.; Longtin, A.; Farmer, J.D. Testing for nonlinearity in time series: The method of surrogate data. Phys. D Nonlinear Phenom. 1992, 58, 77–94. [Google Scholar] [CrossRef]
- Schreiber, T.; Schmitz, A. Surrogate Time Series. Phys. D Nonlinear Phenom. 1999, 142, 346–382. [Google Scholar] [CrossRef]
- Allen, R.L. Signal Analysis: Time, Frequency, Scale, and Structure; IEEE Xplore: Piscataway, NJ, USA, 2004. [Google Scholar]
- Birkelund, Y.; Hanssen, A. Improved bispectrum based tests for Gaussianity and linearity. Signal Process. 2009, 89, 2537–2546. [Google Scholar] [CrossRef]
- Yin, Y.; Shang, P. Multiscale Detrended Cross-Correlation Analysis of Traffic Time Series Based on Empirical Mode Decomposition. Fluct. Noise Lett. 2015, 14, 1550023. [Google Scholar] [CrossRef]
- Inamullah Khan. Long Term Operational Modal Parameter Identification of Long Span Cable Stayed Bridge; Southwest Jiaotong University: Chengdu City, Sichuan Province, China, 2016. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 | IMF9 | IMF10 | IMF11 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 3 | 3 | 5 | 12 | 16 | 18 | 28 | 35 | 45 | 40 | 23 | |
| m | 8 | 9 | 6 | 5 | 3 | 2 | 2 | 2 | 2 | 2 | 2 |
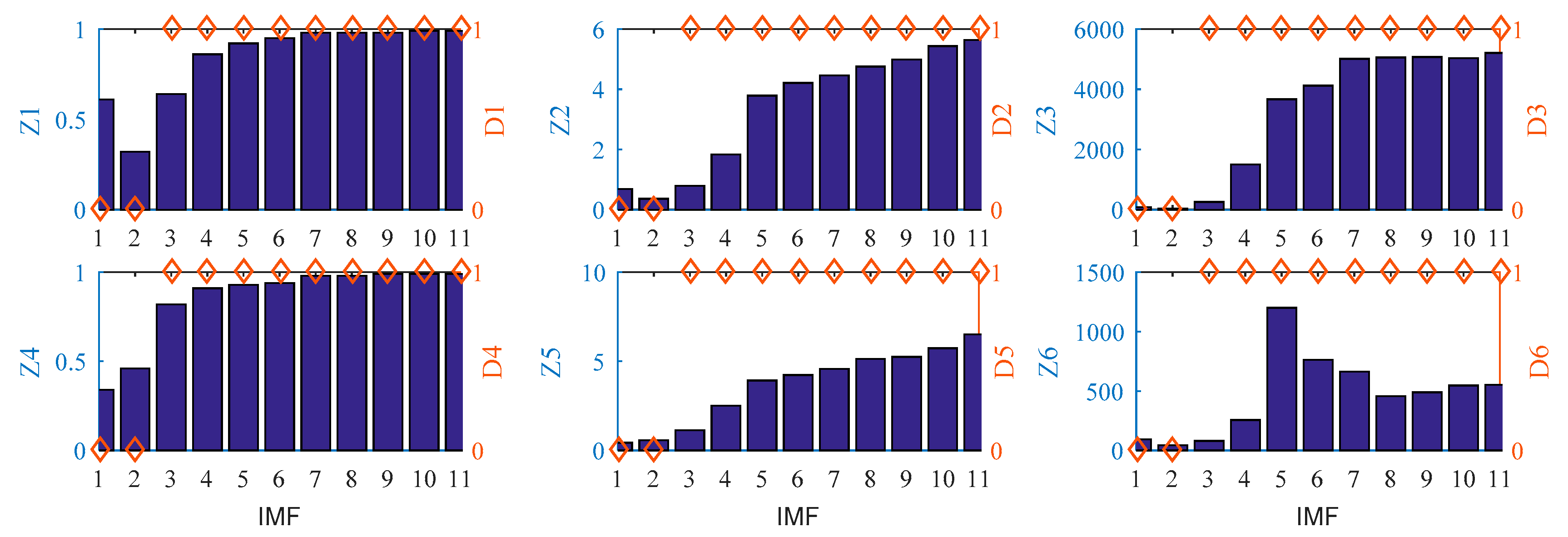
| IMFs | DET | ENTR | Lmax | LAM | VENTR | Vmax | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Z1 | D1 | Z2 | D2 | Z3 | D3 | Z4 | D4 | Z5 | D5 | Z6 | D6 | |
| IMF1 | 0.61 | 0 | 0.69 | 0 | 86 | 0 | 0.34 | 0 | 0.44 | 0 | 93 | 0 |
| IMF2 | 0.32 | 0 | 0.37 | 0 | 43 | 0 | 0.46 | 0 | 0.57 | 0 | 45 | 0 |
| IMF3 | 0.64 | 1 | 0.79 | 1 | 260 | 1 | 0.82 | 1 | 1.14 | 1 | 80 | 1 |
| IMF4 | 0.86 | 1 | 1.84 | 1 | 1501 | 1 | 0.91 | 1 | 2.51 | 1 | 256 | 1 |
| IMF5 | 0.92 | 1 | 3.79 | 1 | 3667 | 1 | 0.93 | 1 | 3.93 | 1 | 1201 | 1 |
| IMF6 | 0.95 | 1 | 4.21 | 1 | 4123 | 1 | 0.94 | 1 | 4.23 | 1 | 764 | 1 |
| IMF7 | 0.98 | 1 | 4.46 | 1 | 5012 | 1 | 0.98 | 1 | 4.58 | 1 | 664 | 1 |
| IMF8 | 0.98 | 1 | 4.75 | 1 | 5056 | 1 | 0.98 | 1 | 5.14 | 1 | 458 | 1 |
| IMF9 | 0.98 | 1 | 4.99 | 1 | 5072 | 1 | 0.99 | 1 | 5.25 | 1 | 489 | 1 |
| IMF10 | 0.99 | 1 | 5.43 | 1 | 5030 | 1 | 0.99 | 1 | 5.74 | 1 | 547 | 1 |
| IMF11 | 0.99 | 1 | 5.64 | 1 | 5206 | 1 | 0.99 | 1 | 6.51 | 1 | 552 | 1 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, E.; Shan, D.; Li, Q. Nonlinear and Non-Stationary Detection for Measured Dynamic Signal from Bridge Structure Based on Adaptive Decomposition and Multiscale Recurrence Analysis. Appl. Sci. 2019, 9, 1302. https://doi.org/10.3390/app9071302
Zhang E, Shan D, Li Q. Nonlinear and Non-Stationary Detection for Measured Dynamic Signal from Bridge Structure Based on Adaptive Decomposition and Multiscale Recurrence Analysis. Applied Sciences. 2019; 9(7):1302. https://doi.org/10.3390/app9071302
Chicago/Turabian StyleZhang, Erhua, Deshan Shan, and Qiao Li. 2019. "Nonlinear and Non-Stationary Detection for Measured Dynamic Signal from Bridge Structure Based on Adaptive Decomposition and Multiscale Recurrence Analysis" Applied Sciences 9, no. 7: 1302. https://doi.org/10.3390/app9071302
APA StyleZhang, E., Shan, D., & Li, Q. (2019). Nonlinear and Non-Stationary Detection for Measured Dynamic Signal from Bridge Structure Based on Adaptive Decomposition and Multiscale Recurrence Analysis. Applied Sciences, 9(7), 1302. https://doi.org/10.3390/app9071302