DC-Link Voltage Control of a Grid-Connected Solar Photovoltaic System for Fault Ride-Through Capability Enhancement



Abstract
:
1. Introduction
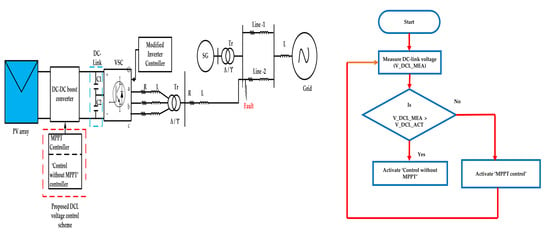
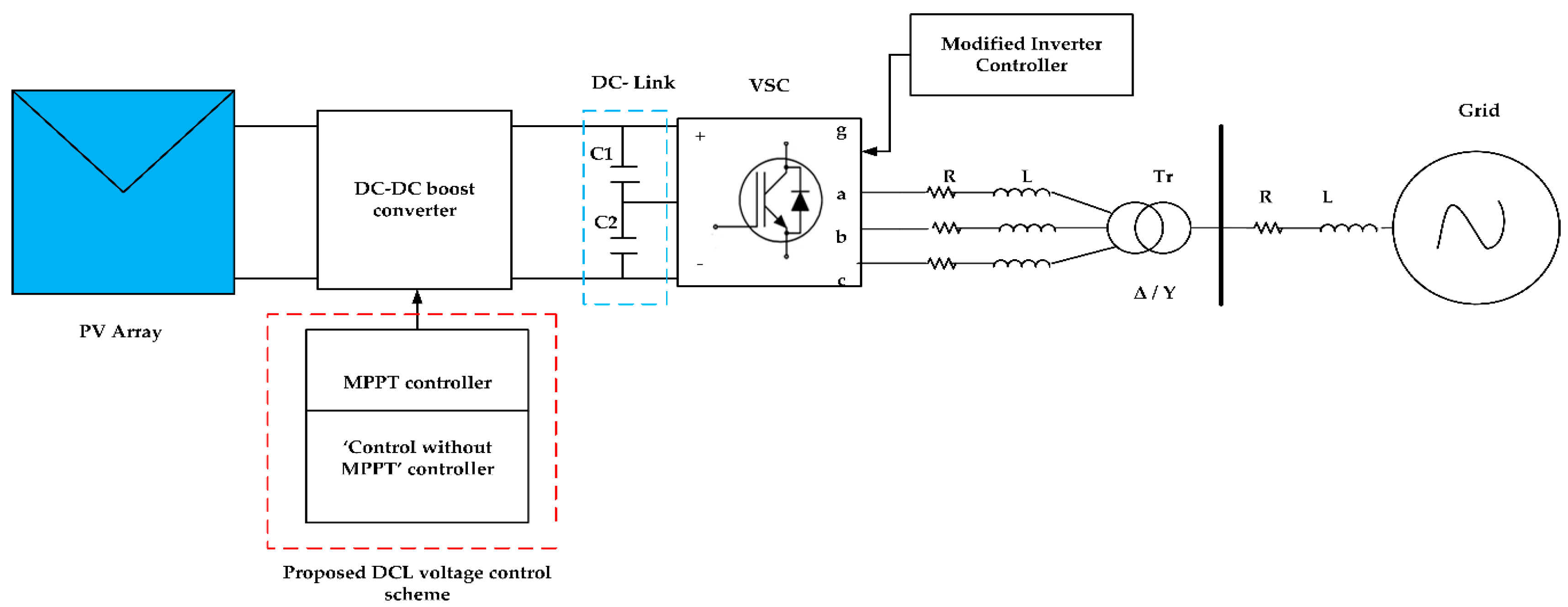
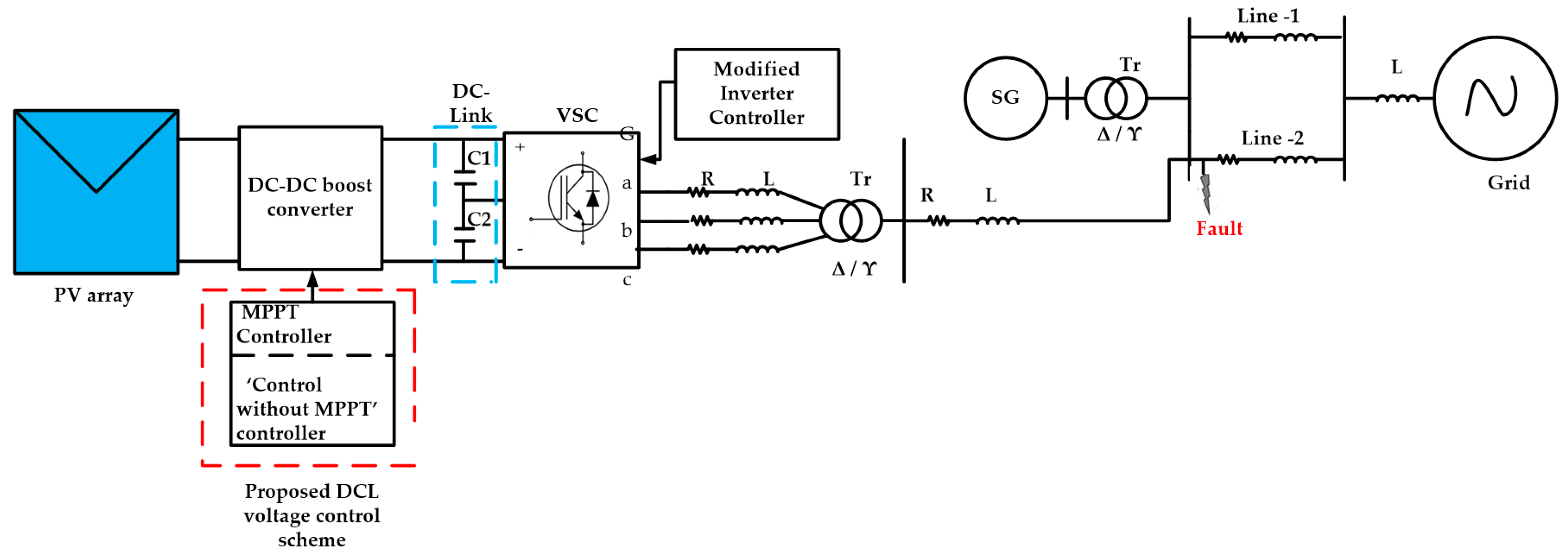
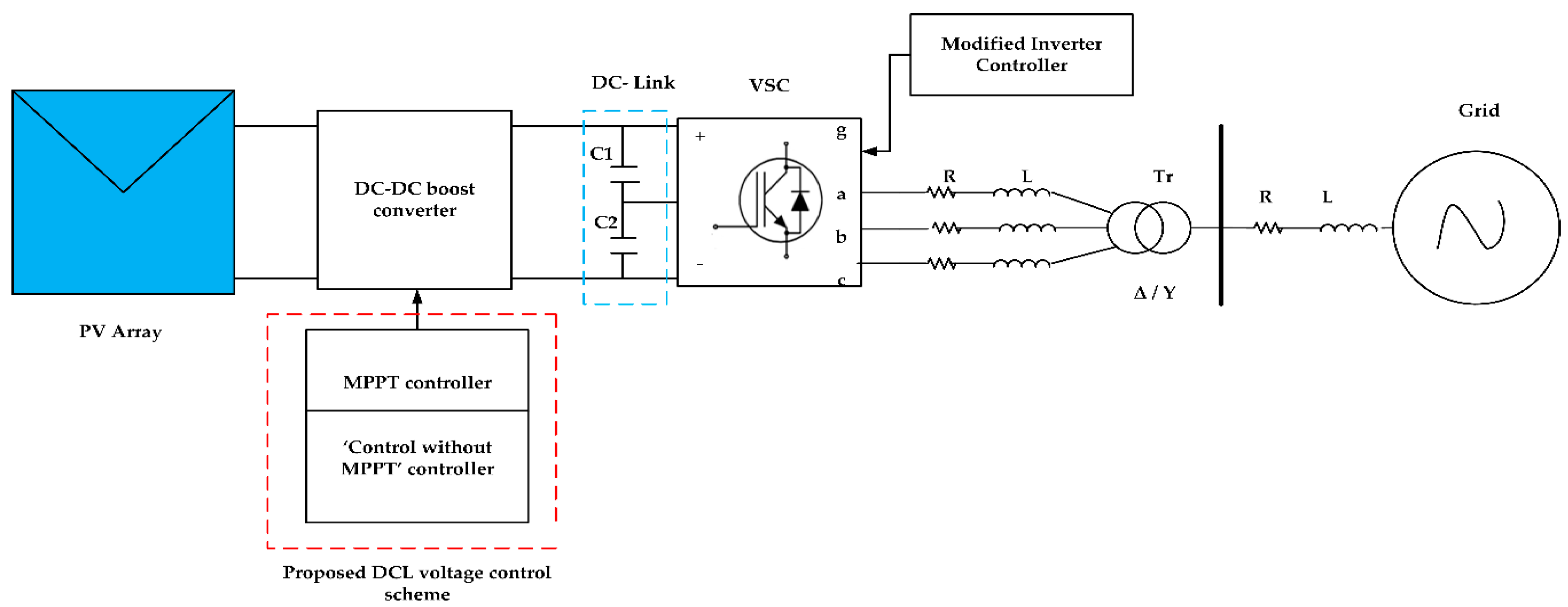
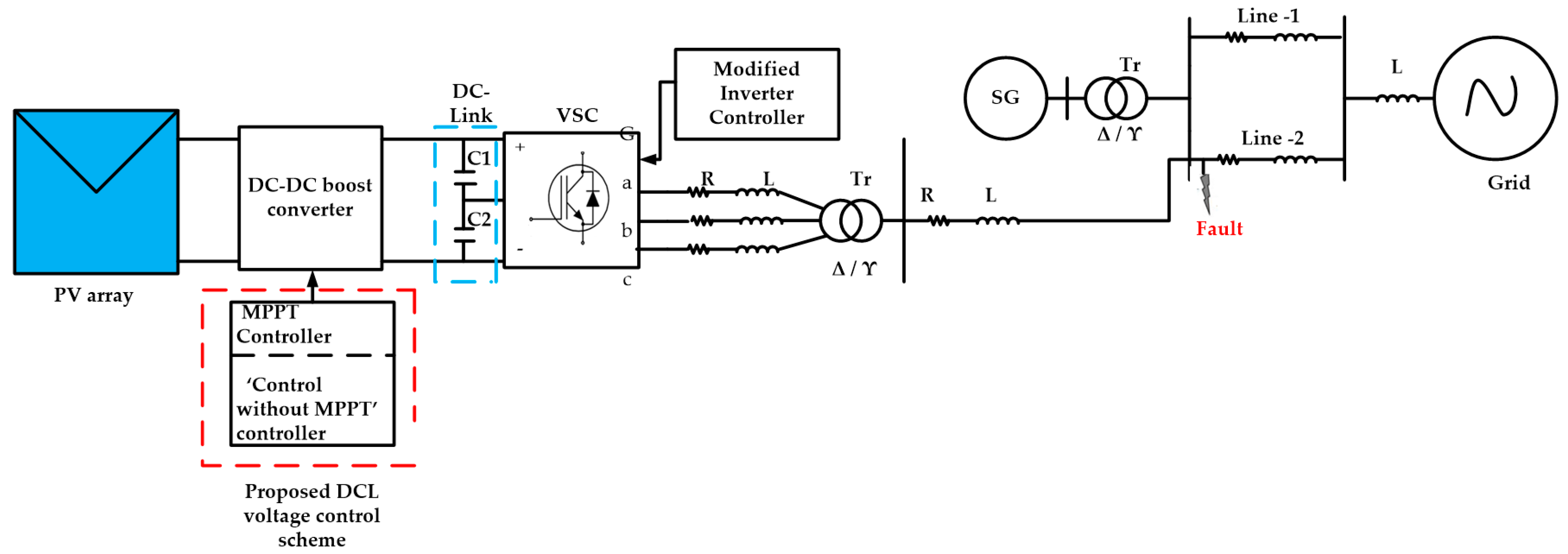
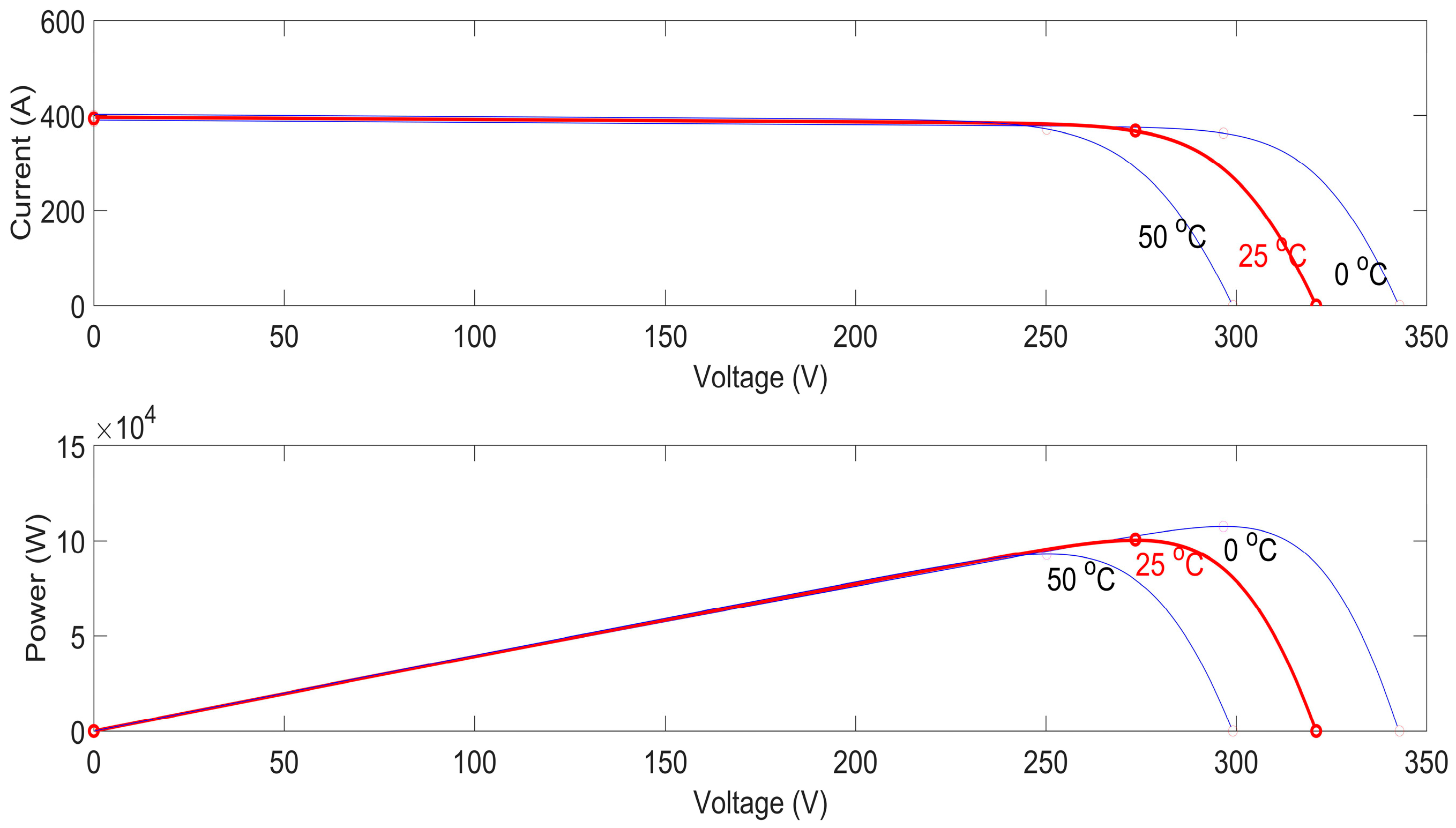
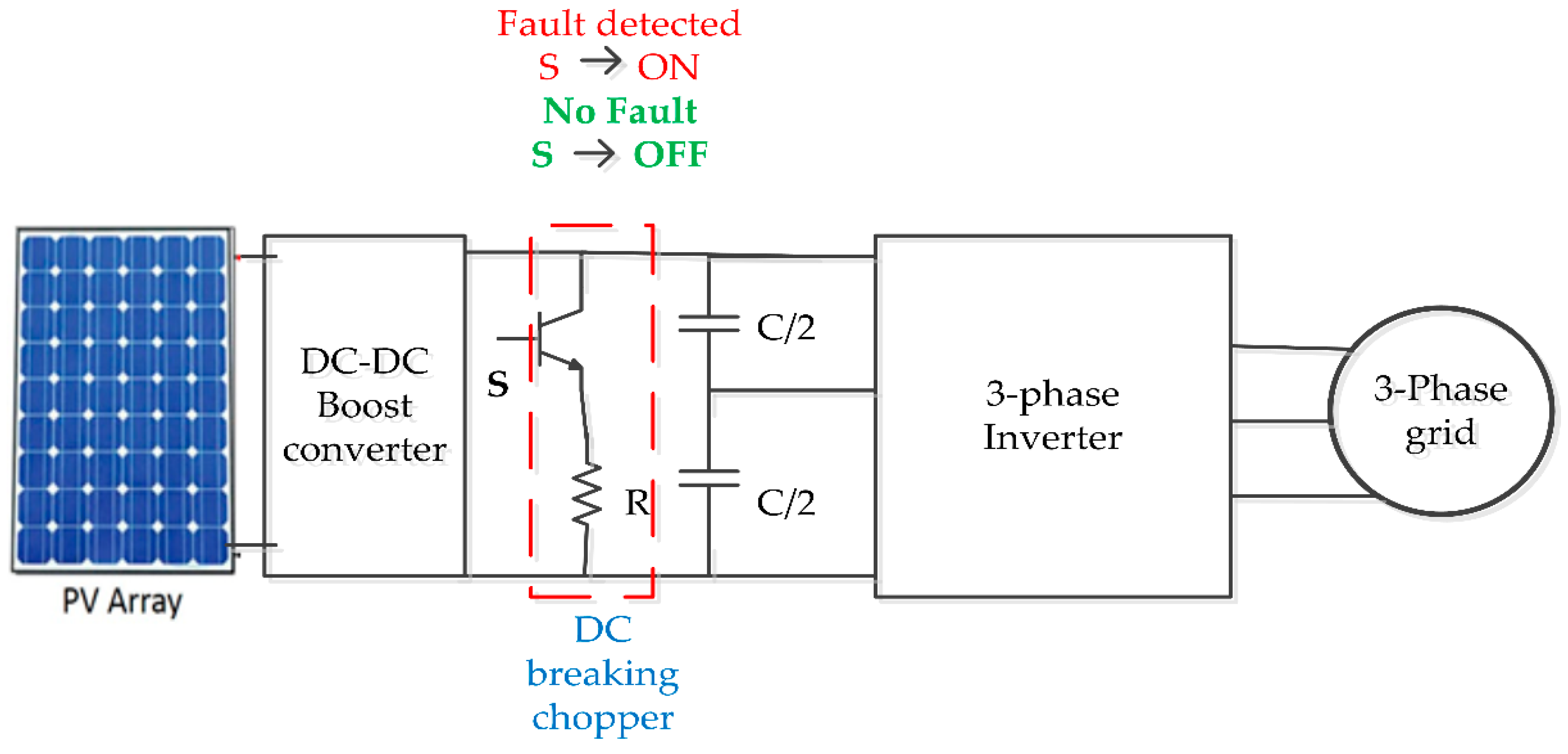
2. Grid-Connected Solar Photovoltaic (SPV) System
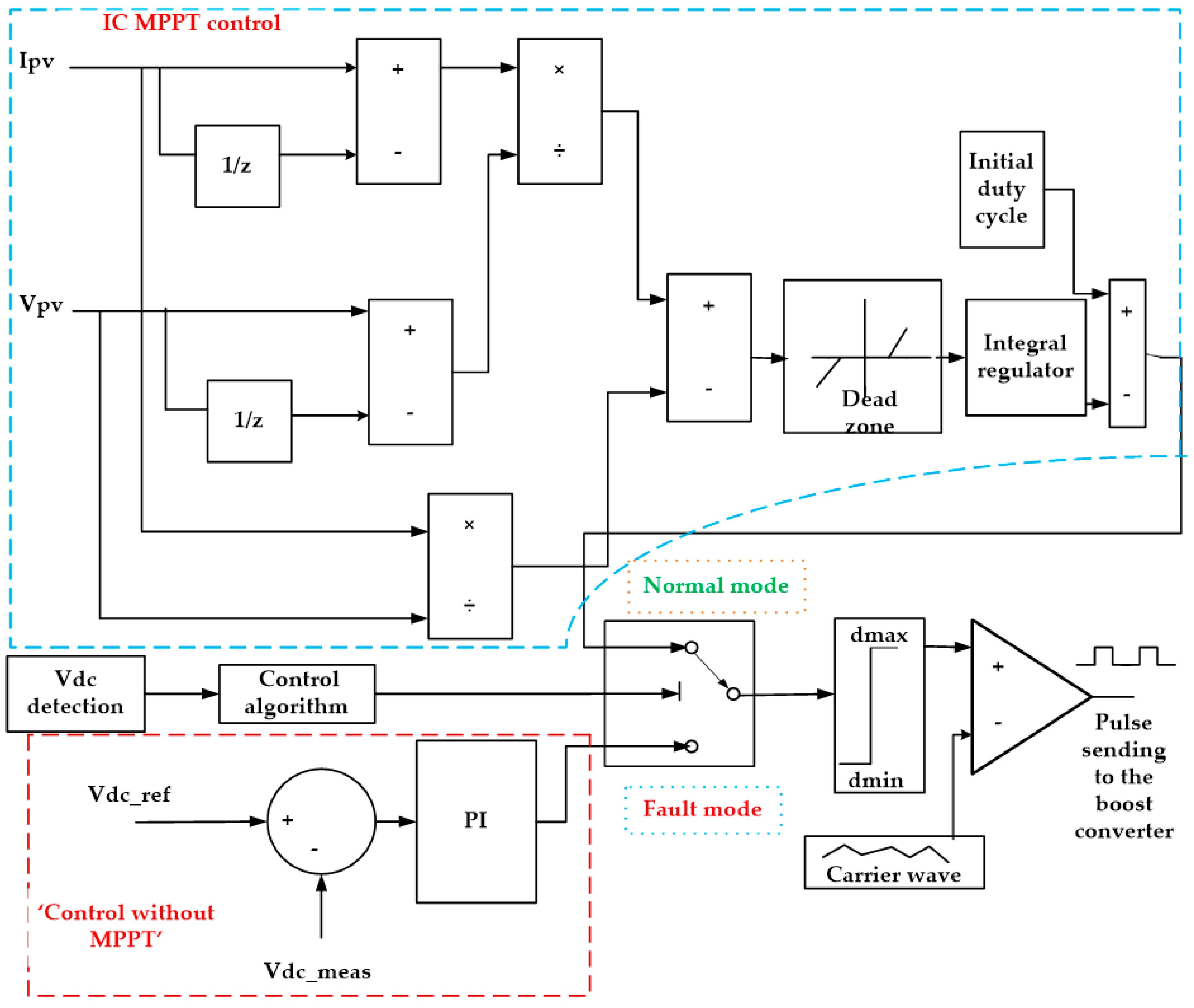
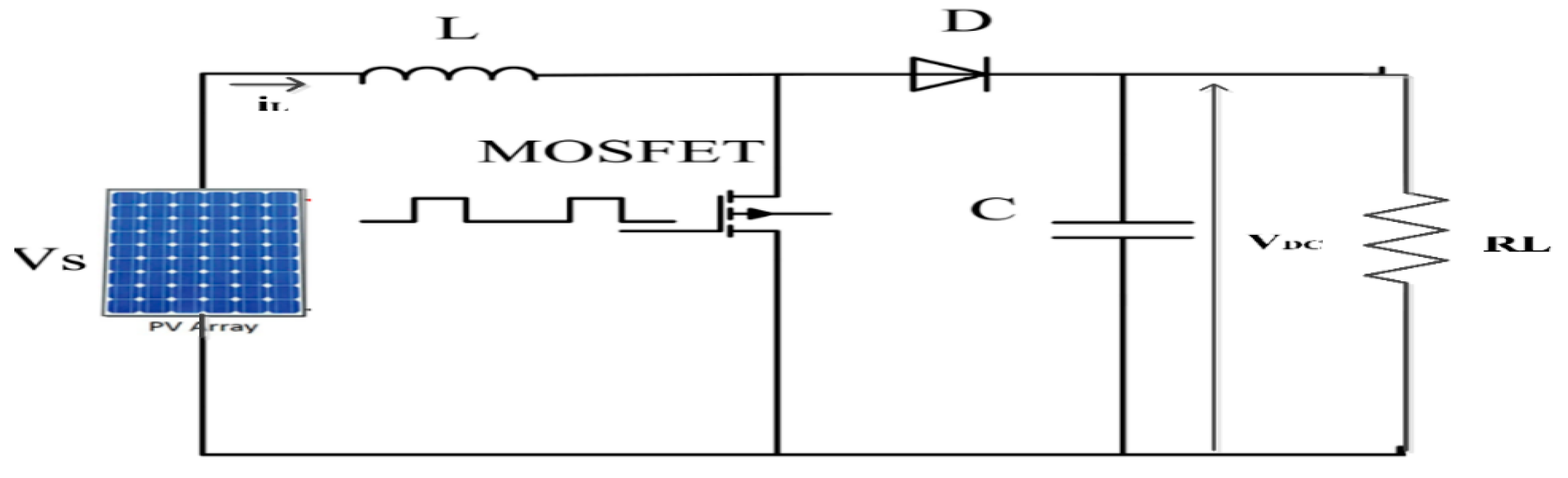
Direct Current–Direct Current (DC–DC) Boost Converter Model
3. Impact of a Fault on the Grid-Connected SPV System
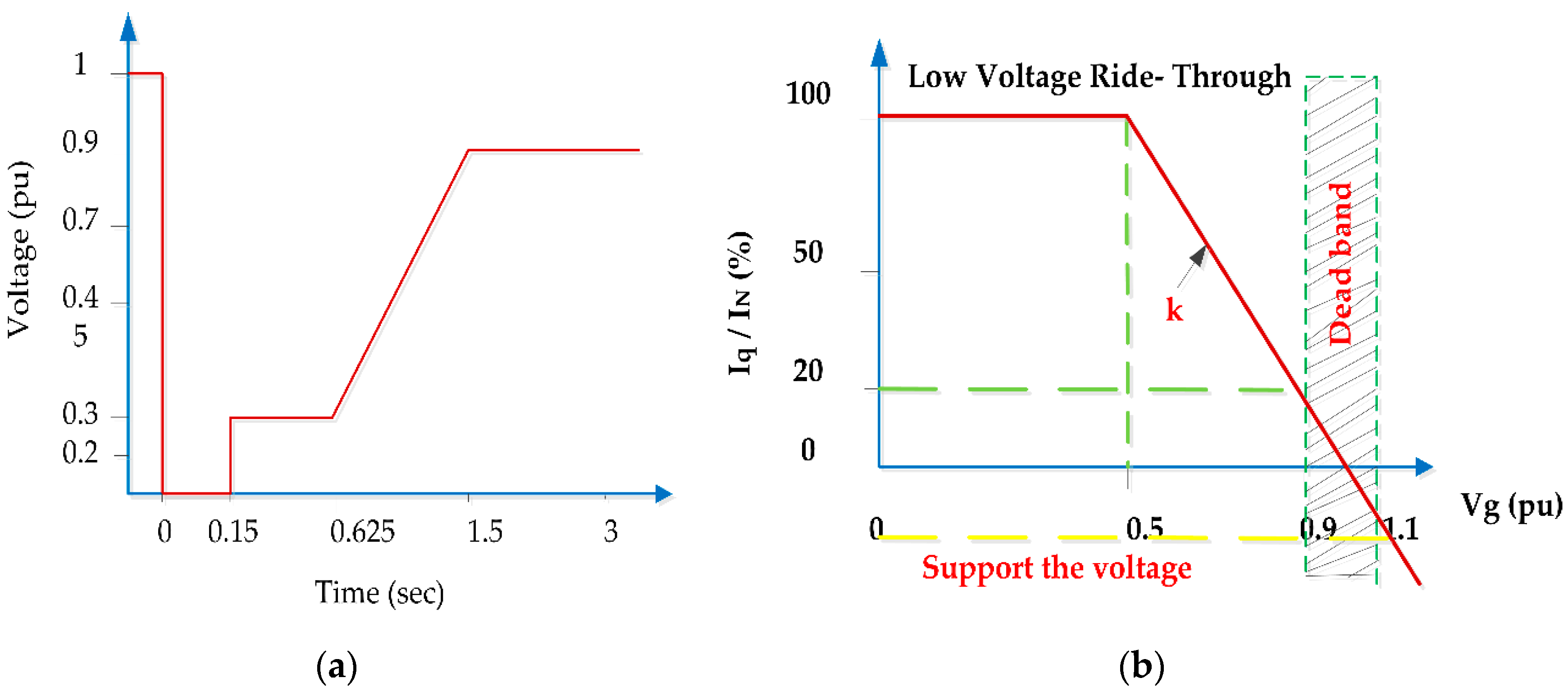
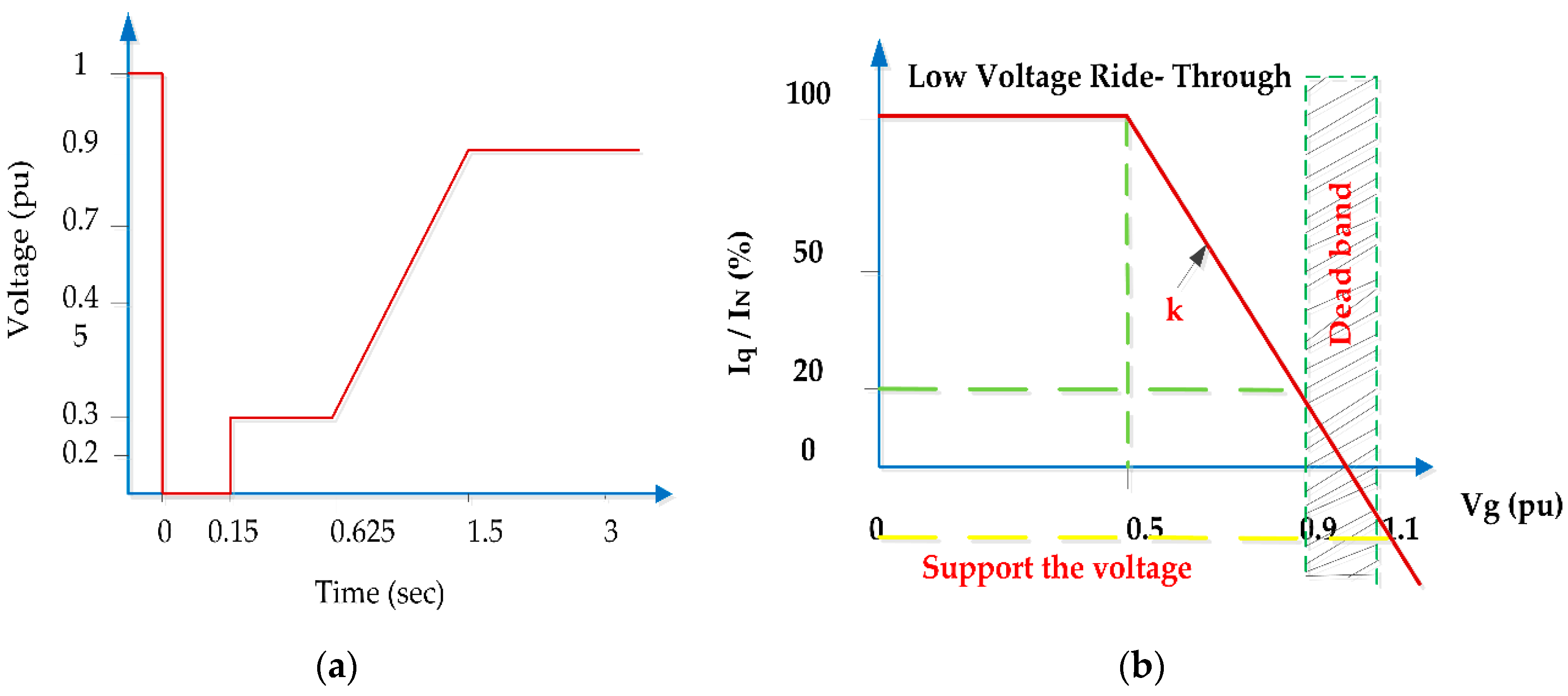
Low Voltage Ride-Through (LVRT) Capability of the SPV System
4. Proposed LVRT Enhancement Strategies
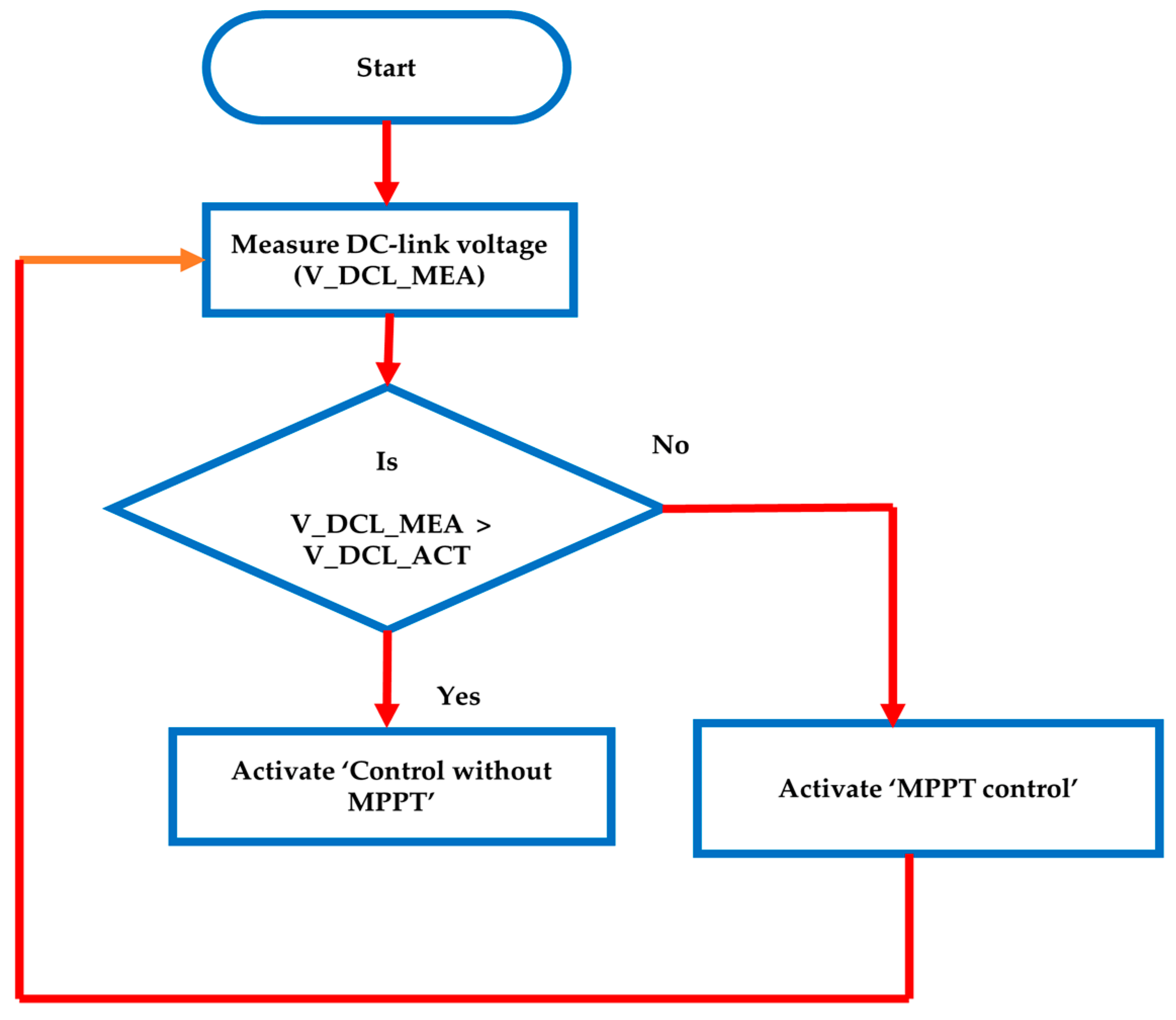
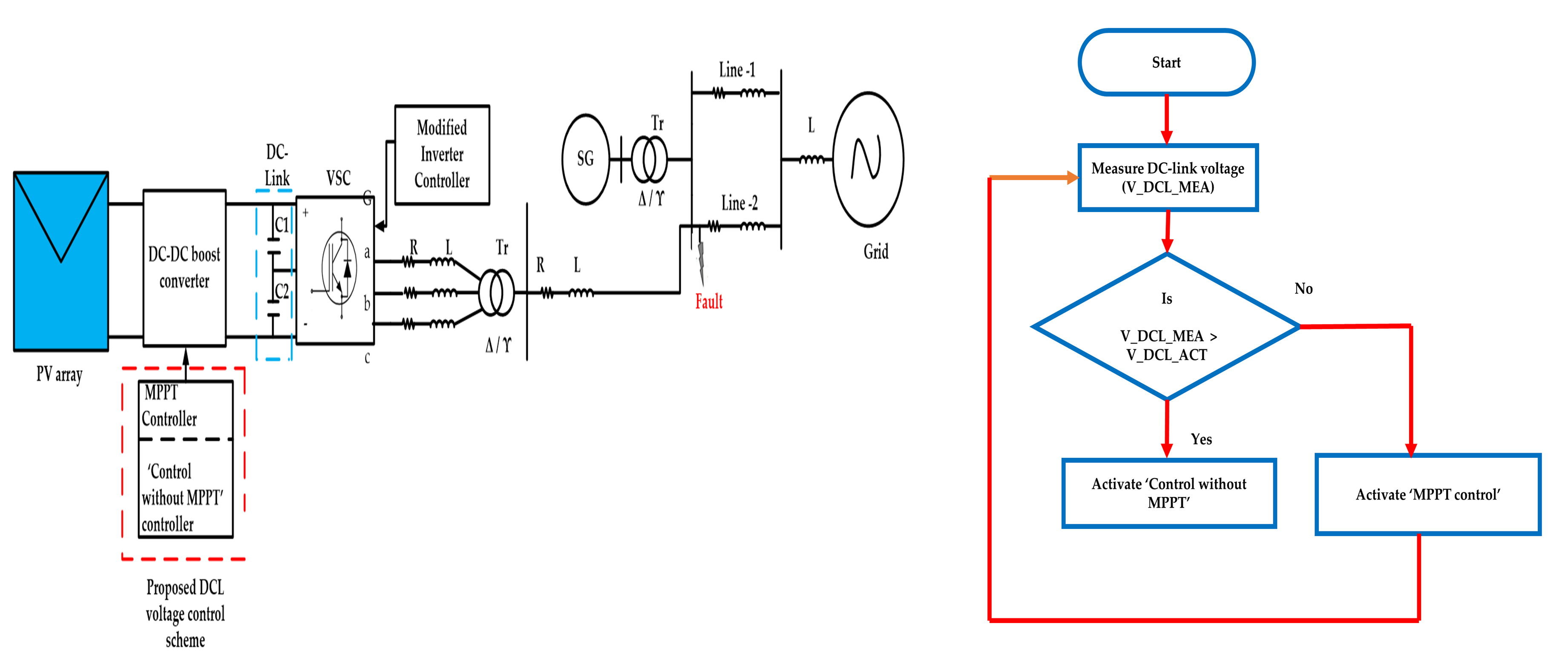
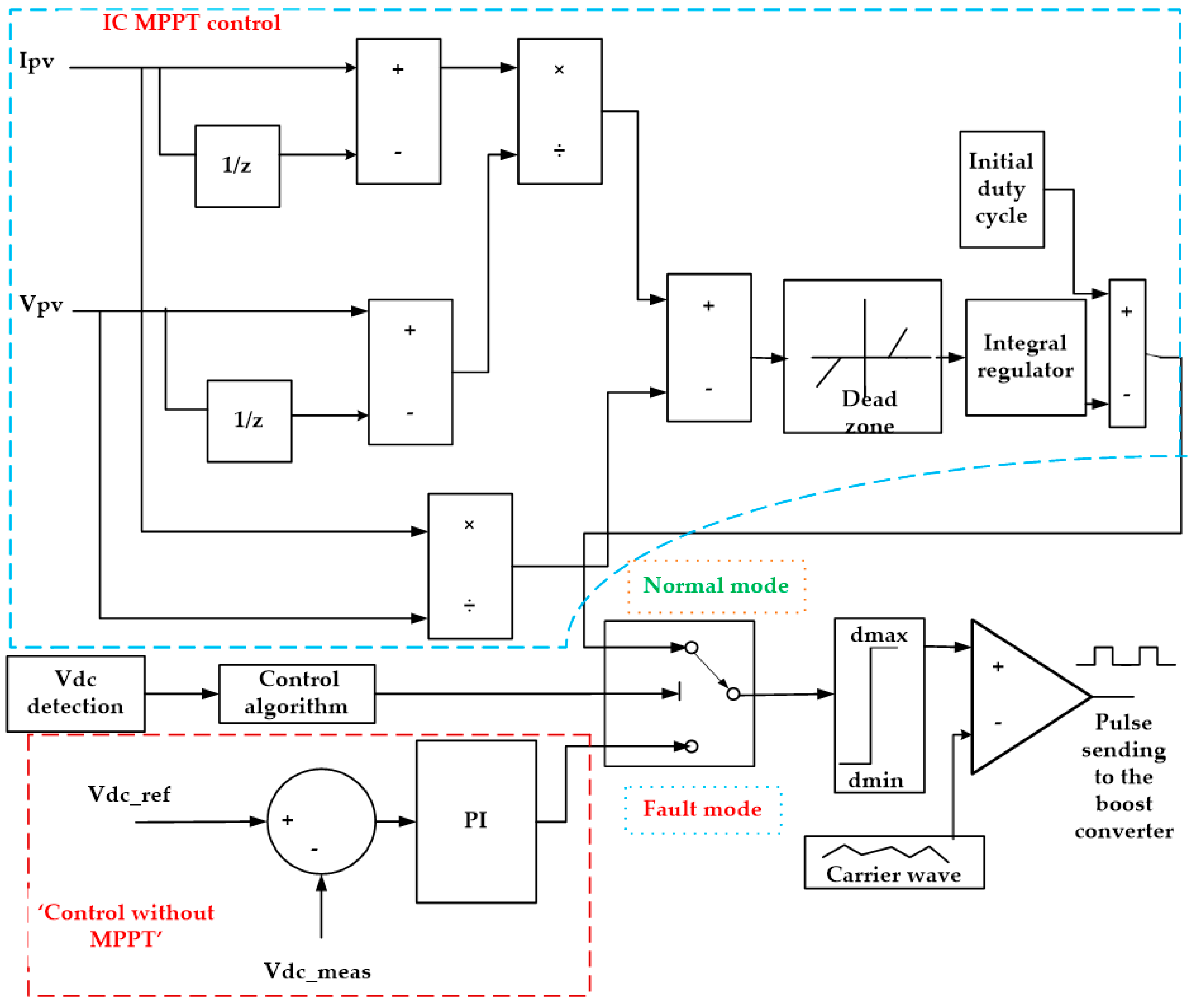
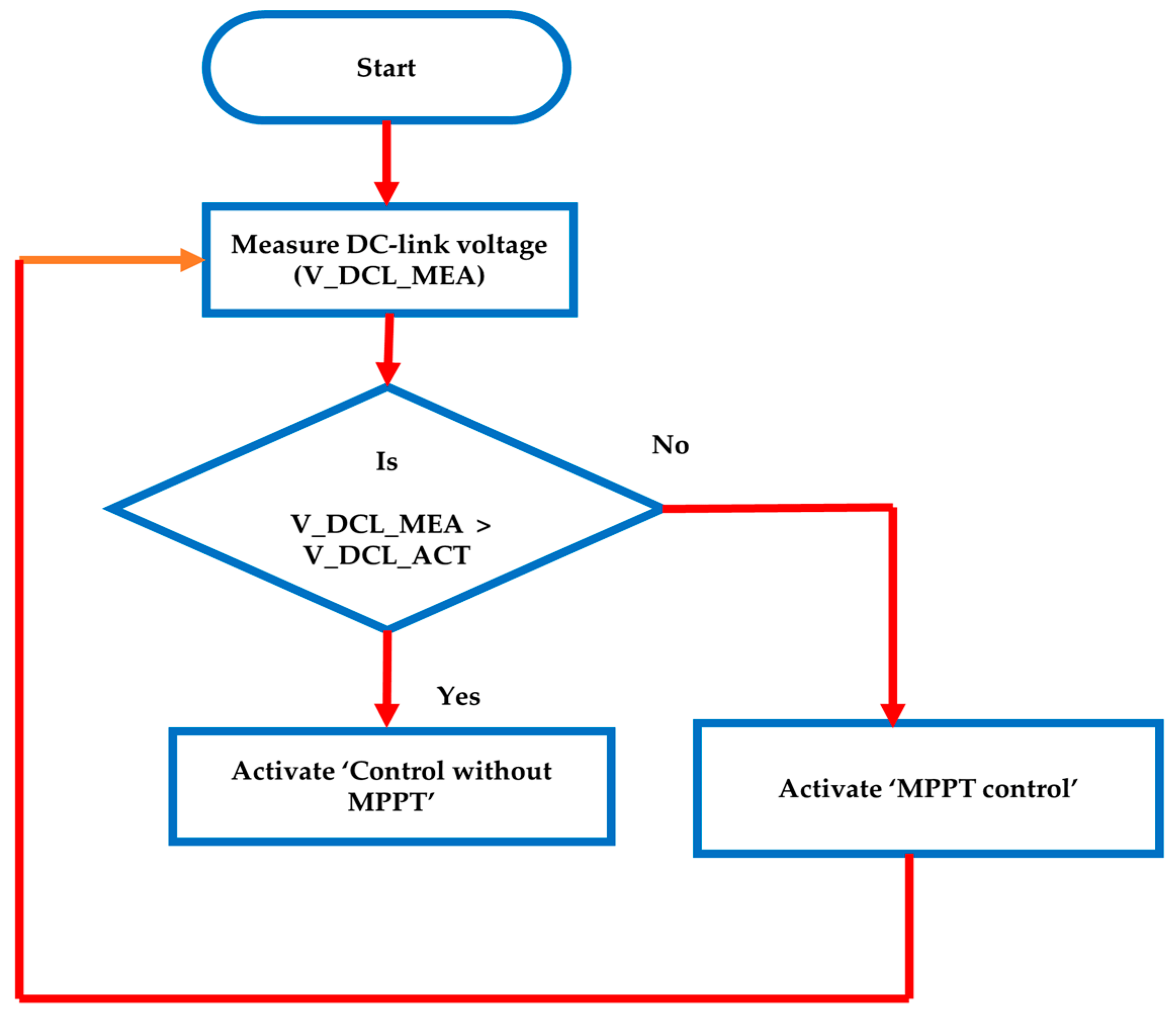
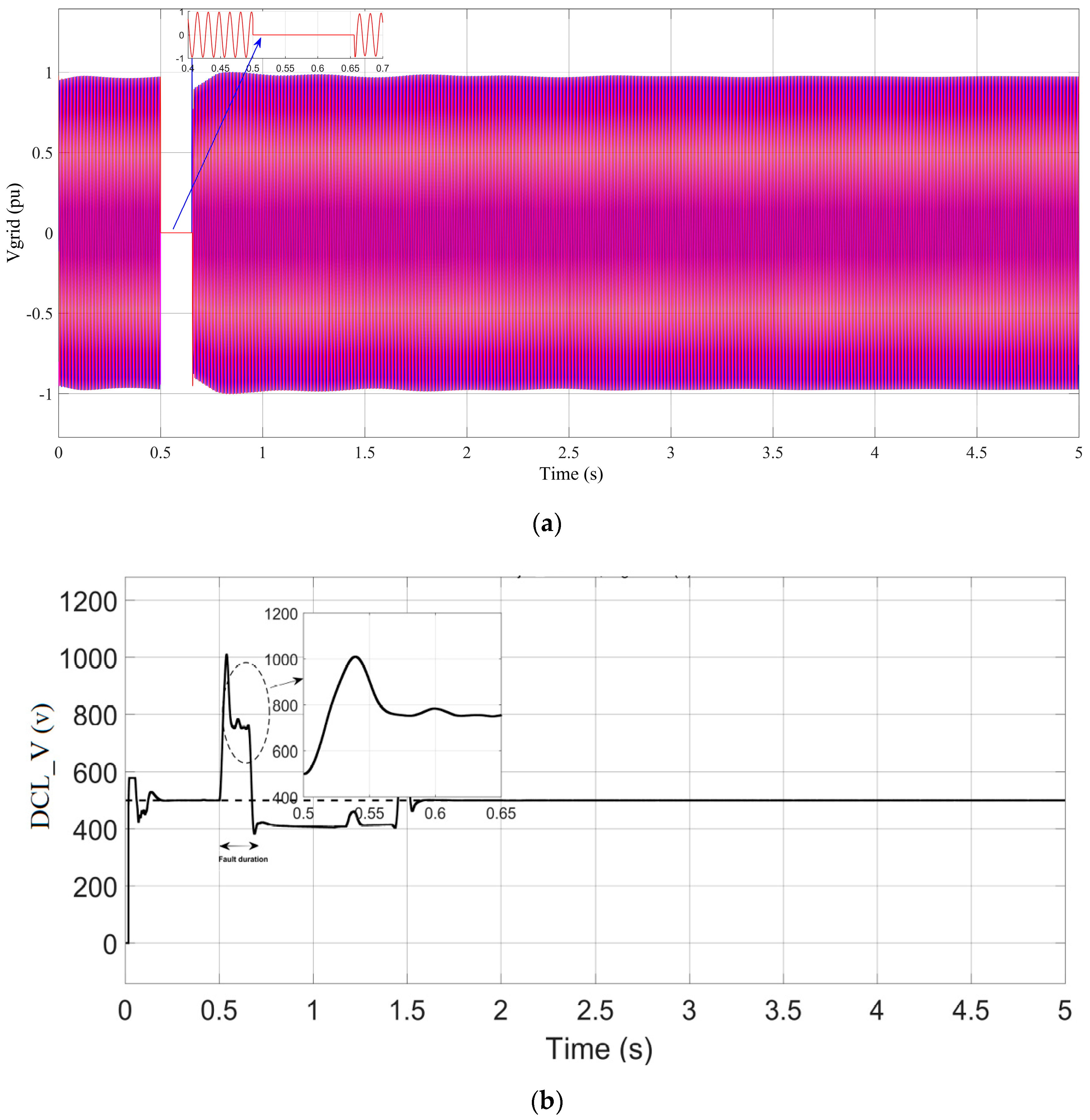
4.1. DC-Link (DCL) Voltage Control Scheme
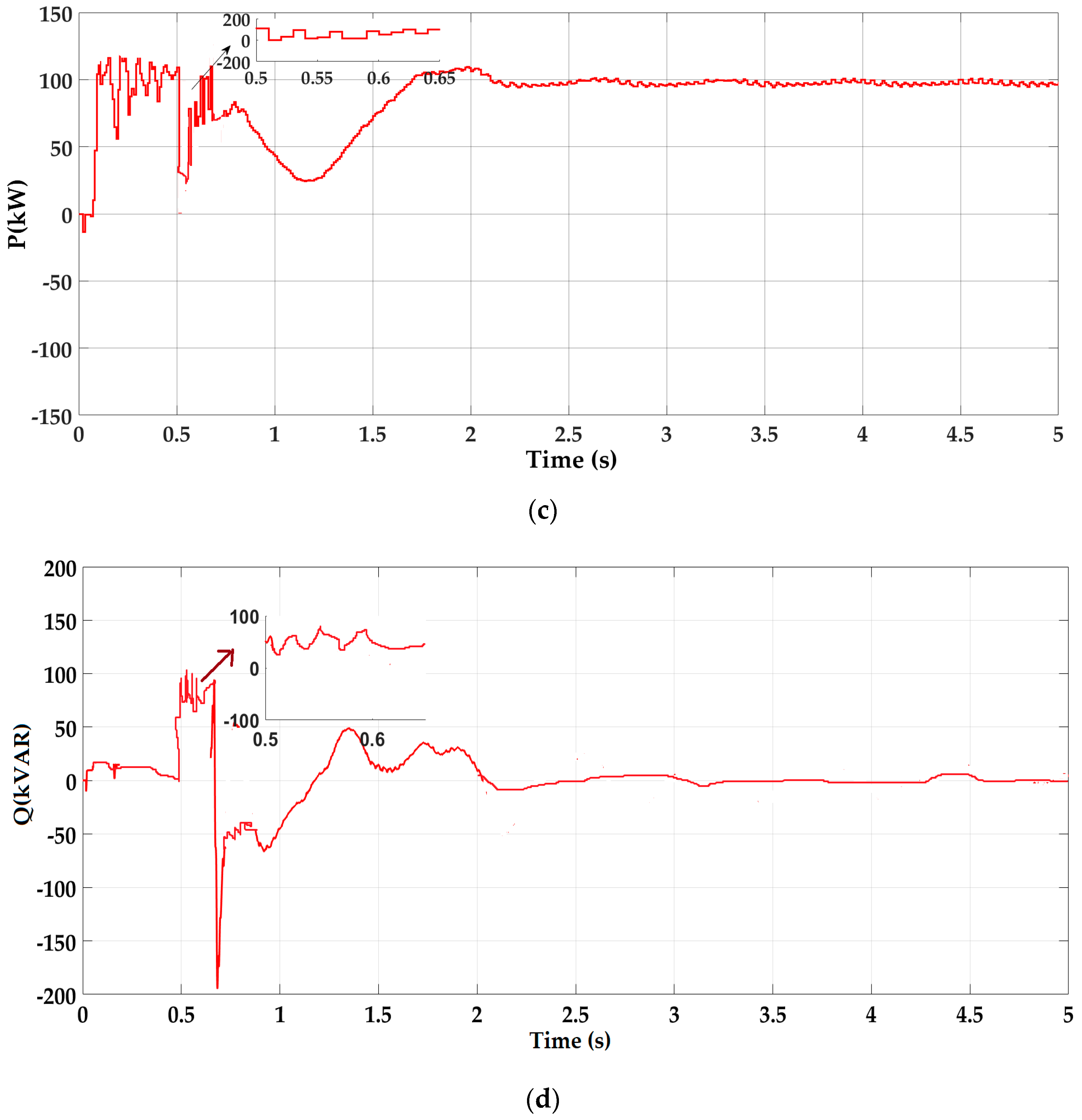
4.2. Reactive Power Injection Scheme
| Algorithm 1: Proposed LVRT method based on reactive power injection. |
| 1: Measuring Vg_rms value in per unit (pu); |
| 2: Nominal Vg_rms = = 1.01; |
| 3: If (Vg_rms < 0.9) |
| 4: P = = P* && Q = = Q*; % P* and Q* are the post-fault active and reactive powers |
| 5: else if (0.5 < Vg_rms < 0.9) |
| 6: P = = P* && Q = Q_LVRT; % P is the pre-fault active power and Q_LVRT is the Q at LVRT |
| 7: else if (Vg_rms < 0.5) |
| 8: P = = 0 && Q = = Q max; % Q max is the maximum reactive power injection into the grid |
| 9: else |
| detecting Vg-rms value in per unit (pu); |
| 10: return to step 3 |
5. Simulation Result Analysis and Discussion
5.1. Simulation Details
5.2. Simulation Results
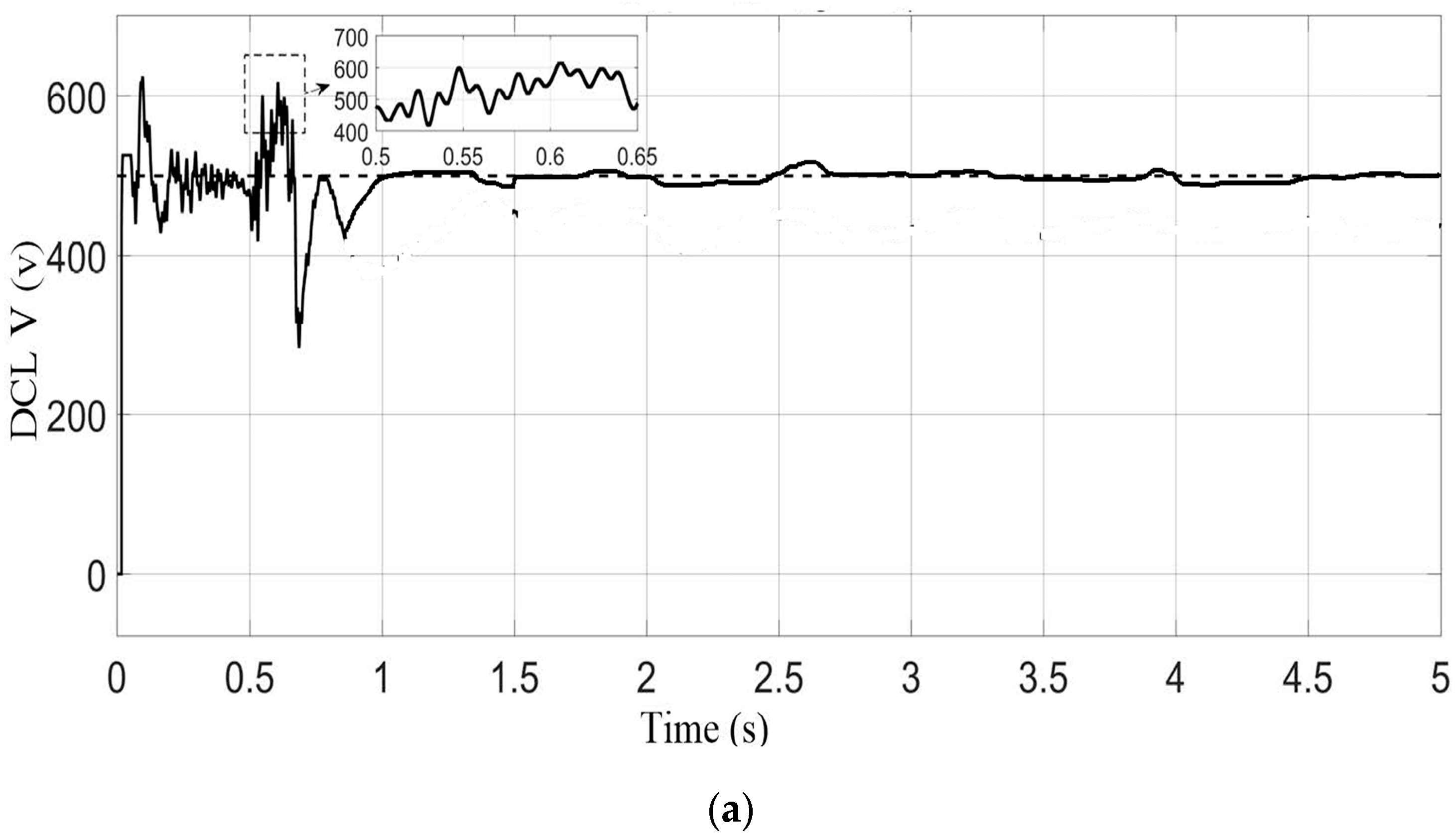
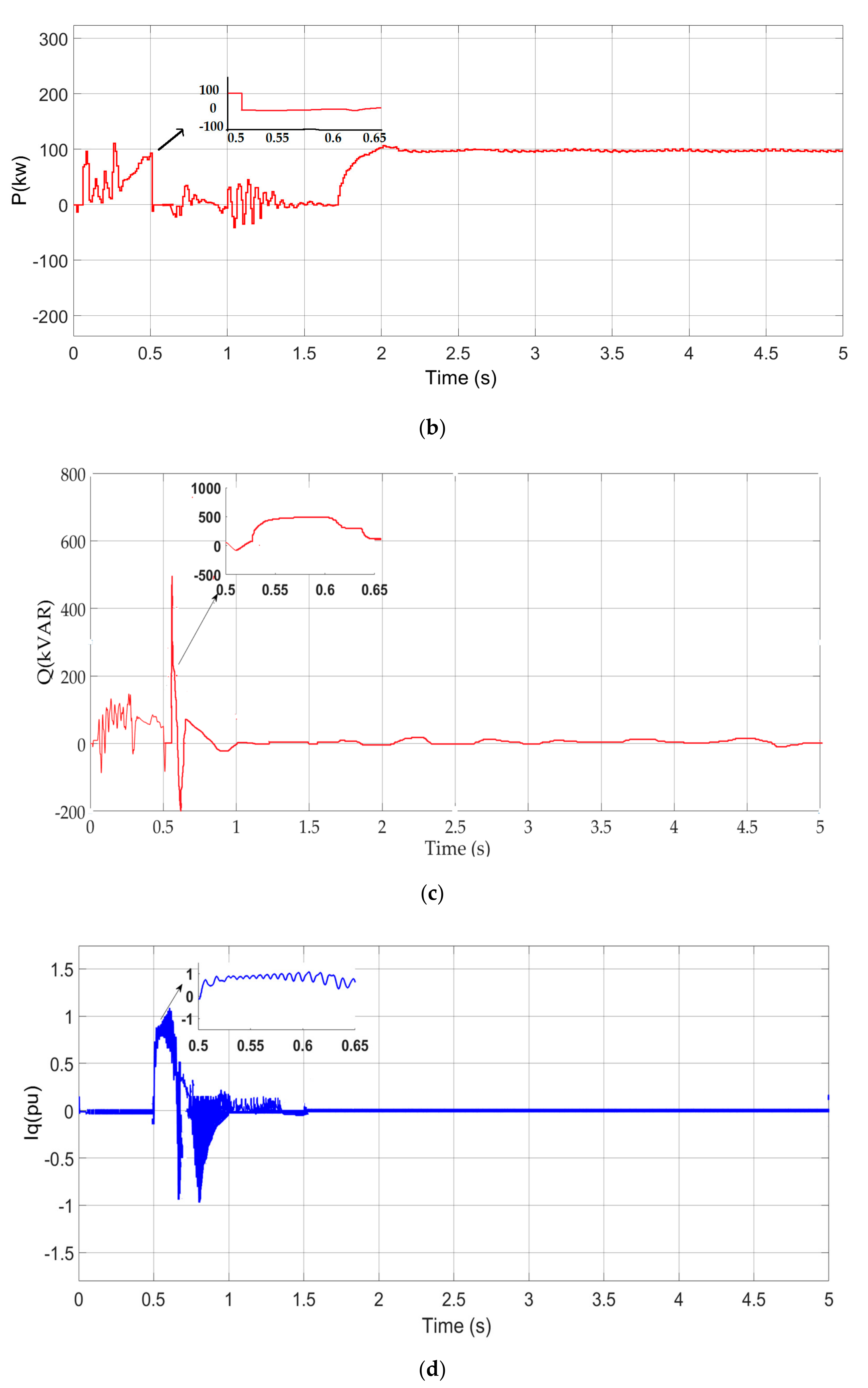
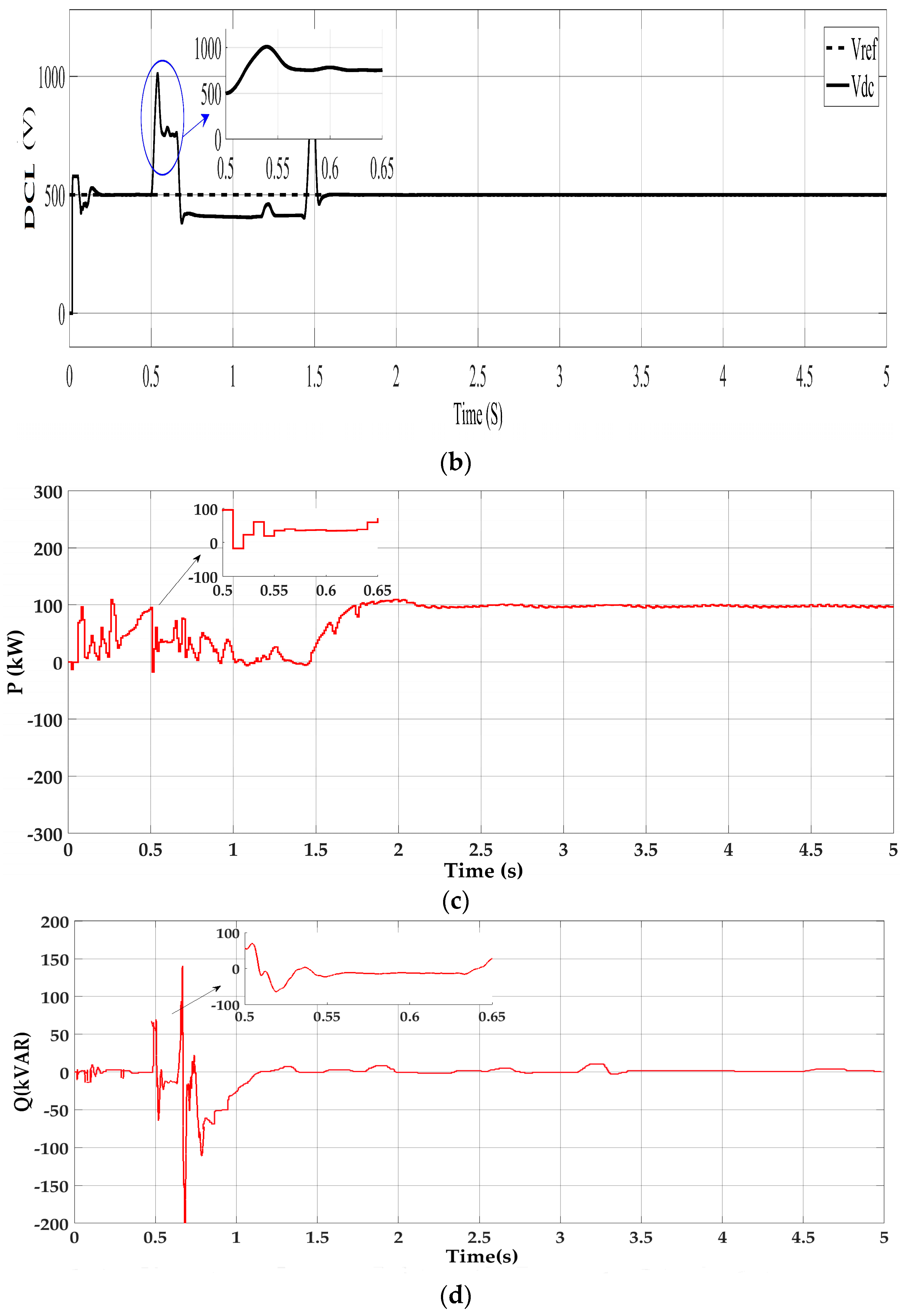
LVRT Enhancement by the Proposed Control Scheme under a Symmetrical Fault (3LG)
5.3. LVRT Enhancement by the Proposed Control Scheme under an Asymmetrical Fault
5.3.1. Single-Line to Ground Fault (1LG)
5.3.2. Two-Line to Ground Fault (2LG)
5.4. Quantification of Results
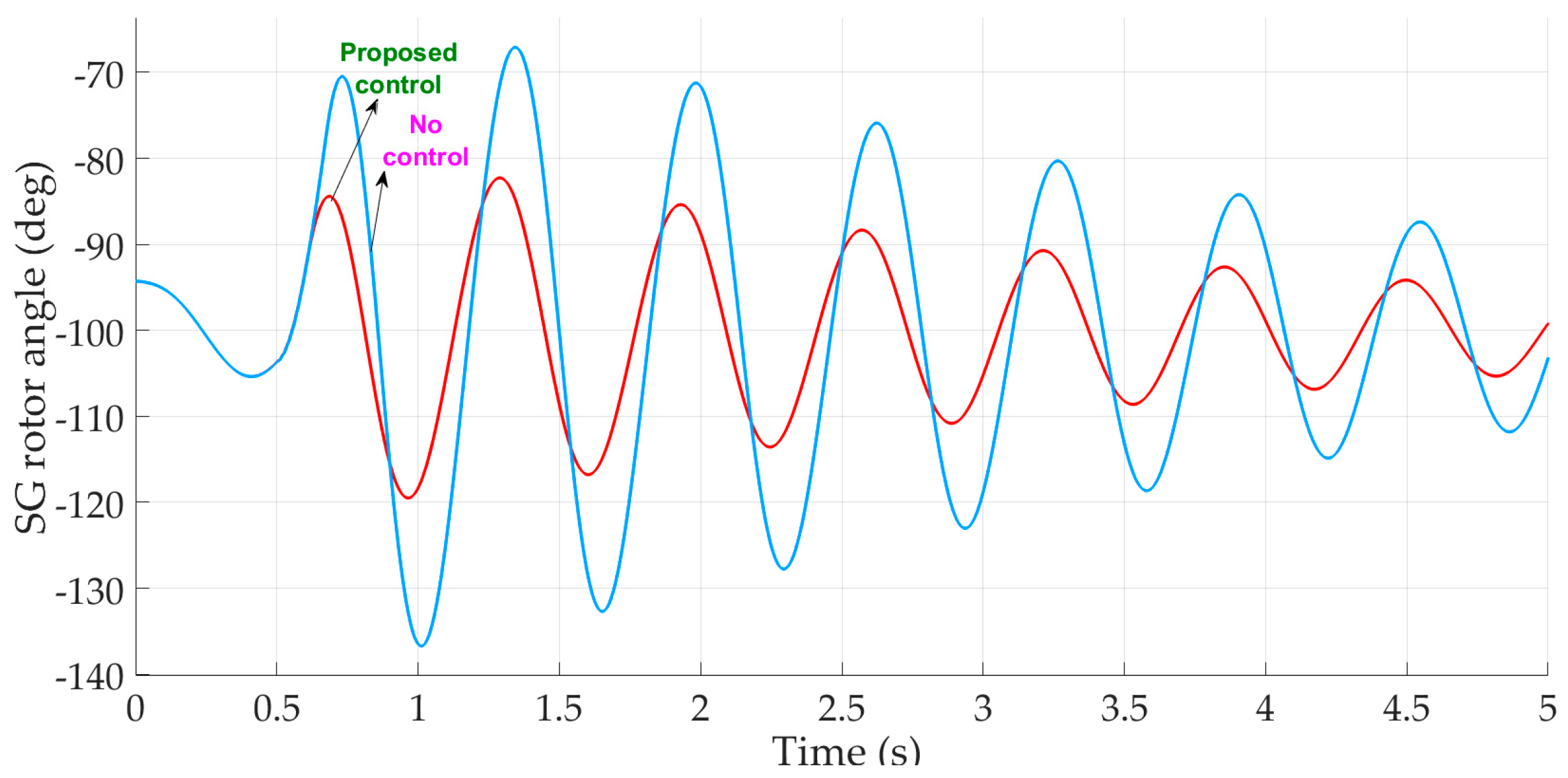
5.5. Stability Analysis
6. Comparison of the Conventional and Proposed LVRT Strategies
6.1. Limitations of the Proposed Control Scheme
- ▪
- The proposed control strategy is not appropriate for the single-phase two-stage PV system, since single-phase PV systems are commonly connected to low-voltage feeders, which are mainly resistive (i.e., with a high R/X ratio). Therefore, injecting reactive power into the grid under fault conditions may not contribute significantly to grid voltage recovery. Nevertheless, the main objective of the proposed control approach is to reduce the active power injection to the grid, and at the same time inject reactive power for voltage recovery during fault conditions.
- ▪
- Avoiding operation of the SPV generation system at MPPT during fault conditions reduces the efficiency of the system. However, this would help in reducing the size of the capacitor connected to the DC-link. In addition, the network faults are for very shorter periods of time, which will not affect the system performance much.
- ▪
- The control requires an additional stage of computation, which may increase the cost a little, but the main advantage is avoiding DC link over-voltage, which eventually saves the capacitor from being damaged.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Pspv | Photovoltaic Array Power (W) | Pgf | Grid Power -Fault Condition (pu) |
| ∆T | Fault Period (s) | IN | Nominal Current (pu) |
| PDC-link | DC-Link Power (W) | VDCL | DC-Link Voltage (v) |
| CDC | DC-Link Capacitor (F) | Kp | Proportional Gain |
| Pg | Grid Power (pu) | VDCL_f | DC-Link Voltage-Fault Condition (v) |
| Iq | Reactive Current(pu) | Ki | Integral Gain |
| Vgrms | Grid Voltage RMS value (pu) | Kaw | Anti-Windup Gain |
| Igrms | Grid Current in RMS value (pu) | Q | Reactive Power (kVAR) |
| Igrms | Grid Current in RMS value (pu) | P | Active Power (kW) |
| Iq0 | Initial Reactive Current (pu) | S | Apparent Power (w) |
| Ig | Grid Current (pu) | Qmax | Maximum Reactive Power (pu) |
| CDC | DC-Link Capacitor (F) | Ts | Sample Time (s) |
| D | Duty Cycle | d2 | Duty Cycle for the Proposed Control |
| Vd_ref | d-Axis Reference Voltage (pu) | dmin | Lower Limit for the Duty Cycle |
| Vq_ref | q-Axis Reference Voltage (pu) | dmax | Maximum Limit for the Duty Cycle |
| Id_ref | d-Axis Reference Current (pu) | dunsta | Unsaturated Limit for the Duty Cycle |
| Iq_ref | q-Axis Reference Current (pu) | dsat | Saturated Limit for the Duty Cyle |
| ∆Vdc | DC-Link Voltage Deviation (v) | SGspeed | Synchronous Generator Speed (pu) |
| ∆Ppv | PV-Power Deviation (w) | SGangle | Synchronus Generator Rotor Angle (deg) |
| Ppv-rated | Rated PV Power (w) | ωSGrated | Rated Synchronous Generator Speed (pu) |
| Id | d-Axis Current (pu) | δSG_rated | Rated Synchronous Rotor Angle |
| Smax | Maximum Apparent Power (w) |
References
- Messenger, R.; Ventre, J. Photovoltaic Systems Engineering, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2010. [Google Scholar]
- Miret, J.; Castilla, M.; Camacho, A.; de Vicuña, L.G.; Matas, J. Control scheme for photovoltaic three-phase inverters to minimize peak currents during unbalanced grid-voltage sags. IEEE Trans. Power Electron. 2012, 27, 4262–4271. [Google Scholar] [CrossRef]
- Yang, Y.; Blaabjerg, F.; Zou, Z. Benchmarking of grid fault modes in single-phase grid-connected photovoltaic systems. IEEE Trans. Ind. Appl. 2013, 49, 2167–2176. [Google Scholar] [CrossRef]
- Marinopoulos, A.; Papandrea, F.; Reza, M.; Norrga, S.; Spertino, F.; Napoli, R. Grid integration aspects of large solar PV installations: LVRT capability and reactive power/voltage support requirements. In Proceedings of the 2011 IEEE Trondheim PowerTech, Trondheim, Norway, 19–23 June 2011; pp. 1–8. [Google Scholar]
- Al-Shetwi, A.Q.; Sujod, M.Z. Modeling and control of grid-connected photovoltaic power plant with fault ride-through capability. J. Sol. Energy Eng. 2017, 140, 021001. [Google Scholar] [CrossRef]
- Manikanta, B.V.V.N.; Kesavarao, G.; Shefali, T. LVRT of grid -connected PV system with energy storage. Int. J. Control Theory Appl. 2017, 10, 75–86. [Google Scholar]
- Hossain, M.K.; Ali, M.H. Low voltage ride through capability enhancement of grid connected PV system by SDBR. In Proceedings of the IEEE PES T&D Conference and Exposition, Chicago, IL, USA, 14–16 April 2004; pp. 1–5. [Google Scholar]
- Sabir, A. A novel low-voltage ride-through capable energy management scheme for a grid-connected hybrid photovoltaic-fuel cell power source. Int. Trans. Electr. Energy Syst. 2018, e2713. [Google Scholar] [CrossRef]
- Yang, W.; Deng, C.; Zheng, F. Low voltage ride-through capability improvement of photovoltaic systems using a novel hybrid control. J. Renew. Sustain. Energy 2017, 9, 055301. [Google Scholar] [CrossRef]
- Ou, T.C.; Lu, K.H.; Huang, C.J. Improvement of transient stability in a hybrid power multi-system using a designed NIDC (Novel Intelligent Damping Controller). Energies 2017, 10, 488. [Google Scholar] [CrossRef]
- Wu, Y.-S.; Chang, C.-H.; Chen, Y.-M.; Cheng, C.-S.; Liu, C.-W.; Chang, Y.-R. The current control of PV inverter for low voltage ride through. In Proceedings of the 15th International Power Electronics and Motion Control Conference, Novi Sad, Serbia, 4–6 September 2012; pp. LS1d.4-1–LS1d.4-6. [Google Scholar]
- Bae, Y.; Vu, T.K.; Kim, R.Y. Implemental control strategy for grid stabilization of grid-connected PV system based on German grid code in symmetrical low-to-medium voltage network. IEEE Trans. Energy Convers. 2013, 28, 619–631. [Google Scholar] [CrossRef]
- Yang, F.; Yang, L.; Ma, X. An advanced control strategy of PV system for low-voltage ride-through capability enhancement. Sol. Energy 2014, 109, 24–35. [Google Scholar] [CrossRef]
- Park, S.M.; Park, S.Y. Power weakening control of the photovoltaic-battery system for seamless energy transfer in micro grids. In Proceedings of the IEEE Applied power electronics Conference and exposition long beach, Long Beach, CA, USA, 17–21 March 2013; pp. 2971–2976. [Google Scholar]
- Nezhad, A.A.; Zaker, B.A.; Arani, A.K.; Gharehpetian, G.B. Impact of non-MPPT operation mode of PV system considering inverter fault current limiting. In Proceedings of the Conference on Electrical Power Distribution Networks Conference, Semnan, Iran, 19–20 April 2017; pp. 45–50. [Google Scholar]
- Bak, Y.; Lee, J.S.; Lee, K.B. Low-voltage ride-through control strategy for a grid-connected energy storage system. Appl. Sci. 2018, 8, 57. [Google Scholar] [CrossRef]
- Almeida, P.M.; Monteiro, K.M.; Barbosa, P.G.; Duarte, J.L.; Ribeiro, P.F. Improvement of PV grid-tied inverters operation under asymmetrical fault conditions. Solar Energy 2016, 133, 363–371. [Google Scholar] [CrossRef]
- Hong, C.M.; Ou, T.C.; Lu, K.H. Development of intelligent MPPT (maximum power point tracking) control for a grid-connected hybrid power generation system. Energy 2013, 50, 270–279. [Google Scholar] [CrossRef]
- Ou, T.C.; Hong, C.M. Dynamic operation and control of micro grid hybrid power systems. Energy 2014, 66, 314–323. [Google Scholar] [CrossRef]
- Sadeghkhani, I.; Golshan, M.E.; Guerrero, J.M.; Mehrizi-Sani, A. A current limiting strategy to improve fault ride-through of inverter interfaced autonomous micro grids. IEEE Trans. Smart Grid 2017, 8, 2138–2148. [Google Scholar] [CrossRef]
- Perera, B.K.; Ciufo, P.; Perera, S. Point of common coupling voltage control of a grid-connected solar photovoltaic (PV) system. In Proceedings of the 39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 7475–7480. [Google Scholar]
- Ou, T.C. A novel unsymmetrical faults analysis for microgrid distribution systems. Int. J. Electr. Power Energy Syst. 2012, 43, 1017–1024. [Google Scholar] [CrossRef]
- Ou, T.C. Ground fault current analysis with a direct building algorithm for microgrid distribution. Int. J. Electr. Power Energy Syst. 2013, 53, 867–875. [Google Scholar] [CrossRef]
- Boujelben, N.; Masmoudi, F.; Djemel, M.; Derbel, N. Design and comparison of quadratic boost and double cascade boost converters with boost converter. In Proceedings of the 2017 14th International Multi-Conference on Systems, Signals & Devices (SSD), Marrakech, Morocco, 28–31 March 2017; pp. 245–252. [Google Scholar]
- Mousavi, M.; Shabestari, P.M.; Mehrizi-Sani, A. Analysis and output voltage control of a high-efficiency converter for DC Micro grids. In Proceedings of the IECON-44th annual conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 1029–1034. [Google Scholar]
- Mousa, M.; Ahmed, M.; Orabi, M. A switched inductor multilevel boost converter. In Proceedings of the 2010 IEEE International Conference on Power and Energy, Kuala Lumpur, Malaysia, 29 November–1 December 2010; pp. 819–823. [Google Scholar]
- Mirhosseini, M.; Pou, J.; Agelidis, V.G. Single-and two-stage inverter-based grid-connected photovoltaic power plants with ride-through capability under grid faults. IEEE Trans. Sustain. Energy 2015, 6, 1150–1159. [Google Scholar] [CrossRef]
- Máthé, L.; Séra, D.; Kerekes, T. Three-phase photovoltaic systems: Structures, topologies, and control. In Renewable Energy Devices and Systems with Simulations in Matlab® and Ansys; CRC Press: Boca Raton, FL, USA, 2017; pp. 67–90. [Google Scholar]
- Hossain, M.K.; Ali, M.H. Transient stability augmentation of PV/DFIG/SG–based hybrid power system by the parallel-resonance bridge fault current limiter. Electr. Power Syst. Res. 2016, 130, 89–102. [Google Scholar] [CrossRef]
- E.ON-Netz. Grid Code. High and Extra High Voltage. April 2009. Available online: http://www.eon-netz.com/ (accessed on 1 February 2019).
- Islam, S.; Zeb, K.; Din, W.; Khan, I.; Ishfaq, M.; Busarello, T.; Kim, H. Design of a Proportional Resonant Controller with Resonant Harmonic Compensator and Fault Ride Trough Strategies for a Grid-Connected Photovoltaic System. Electronics 2018, 7, 451. [Google Scholar] [CrossRef]
- Shafiul Alam, M.; Abido, M.A. Fault ride-through capability enhancement of voltage source converter-high voltage direct current systems with bridge type fault current limiters. Energies 2017, 10, 1898. [Google Scholar] [CrossRef]
- Ntare, R.; Abbasy, N.H.; Youssef, K.H.M. Low Voltage Ride through Control Capability of a Large Grid Connected PV System Combining DC Chopper and Current Limiting Techniques. J. Power Energy Eng. 2019, 7, 62–79. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index Parameters (%) | Values of Indices | |||||
|---|---|---|---|---|---|---|
| 3-LG | 1-LG | 2-LG | ||||
| Control Type | MPPT Control | Proposed Control | MPPT Control | Proposed Control | MPPT Control | Proposed Control |
| 5.4 | 3.7 | 3.2 | 1.9 | 6.2 | 3.5 | |
| PVpower | 4.3 | 2.8 | 3.1 | 2.2 | 5.1 | 4.2 |
| Index Parameters (%) | Value of Indices | |
|---|---|---|
| MPPT Control | Proposed Control | |
| SGangle | 1.8050 | 0.9722 |
| 0.0500 | 0.0300 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, S.R.; Jeyanthy, P.A.; Devaraj, D.; Shwehdi, M.H.; Aldalbahi, A. DC-Link Voltage Control of a Grid-Connected Solar Photovoltaic System for Fault Ride-Through Capability Enhancement. Appl. Sci. 2019, 9, 952. https://doi.org/10.3390/app9050952
Mohamed SR, Jeyanthy PA, Devaraj D, Shwehdi MH, Aldalbahi A. DC-Link Voltage Control of a Grid-Connected Solar Photovoltaic System for Fault Ride-Through Capability Enhancement. Applied Sciences. 2019; 9(5):952. https://doi.org/10.3390/app9050952
Chicago/Turabian StyleMohamed, S. Raja, P. Aruna Jeyanthy, D. Devaraj, M. H. Shwehdi, and Adel Aldalbahi. 2019. "DC-Link Voltage Control of a Grid-Connected Solar Photovoltaic System for Fault Ride-Through Capability Enhancement" Applied Sciences 9, no. 5: 952. https://doi.org/10.3390/app9050952
APA StyleMohamed, S. R., Jeyanthy, P. A., Devaraj, D., Shwehdi, M. H., & Aldalbahi, A. (2019). DC-Link Voltage Control of a Grid-Connected Solar Photovoltaic System for Fault Ride-Through Capability Enhancement. Applied Sciences, 9(5), 952. https://doi.org/10.3390/app9050952