Control of Flow around an Oscillating Plate for Lift Enhancement by Plasma Actuators



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Method
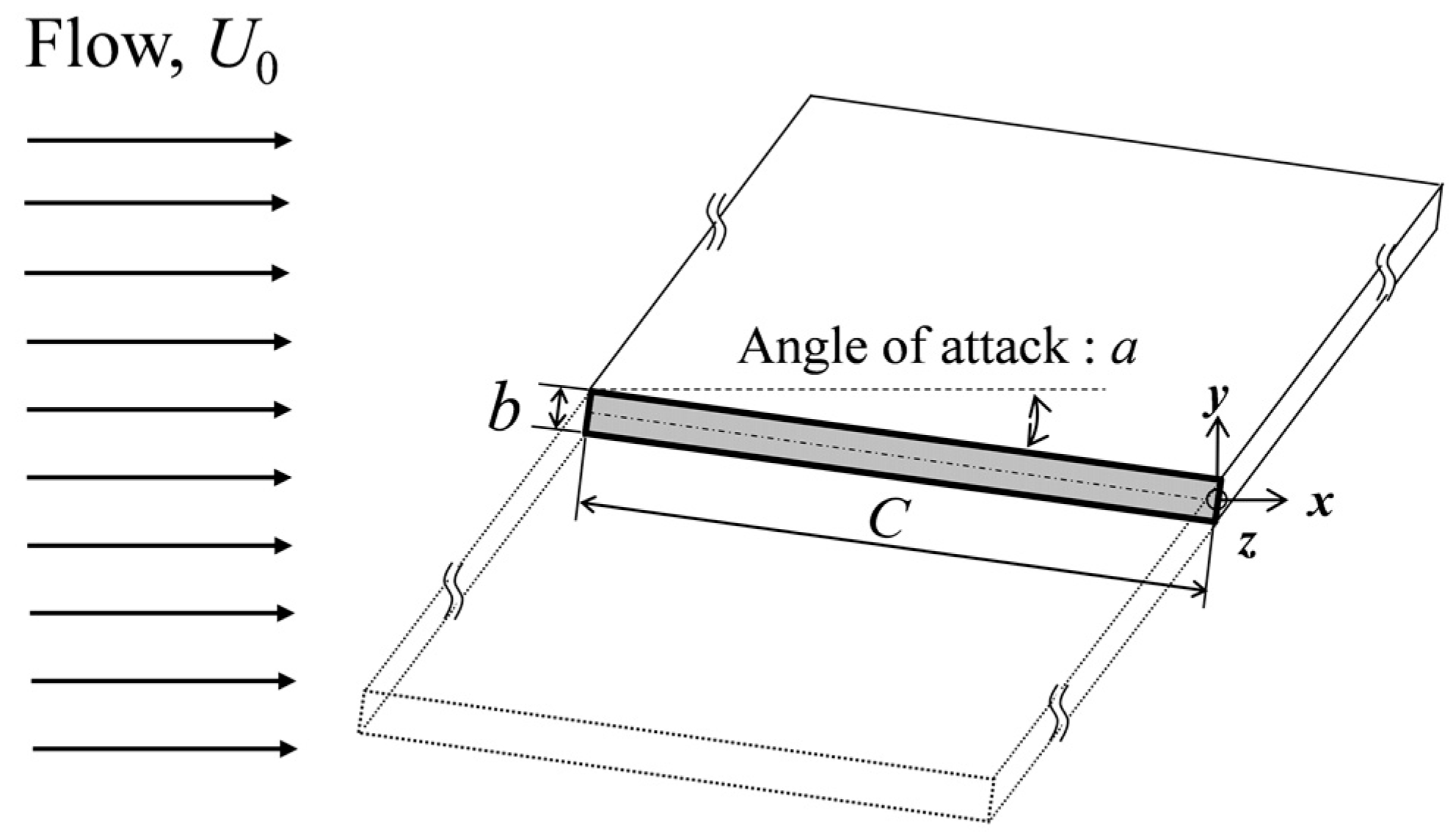
2.1. Flow Configurations
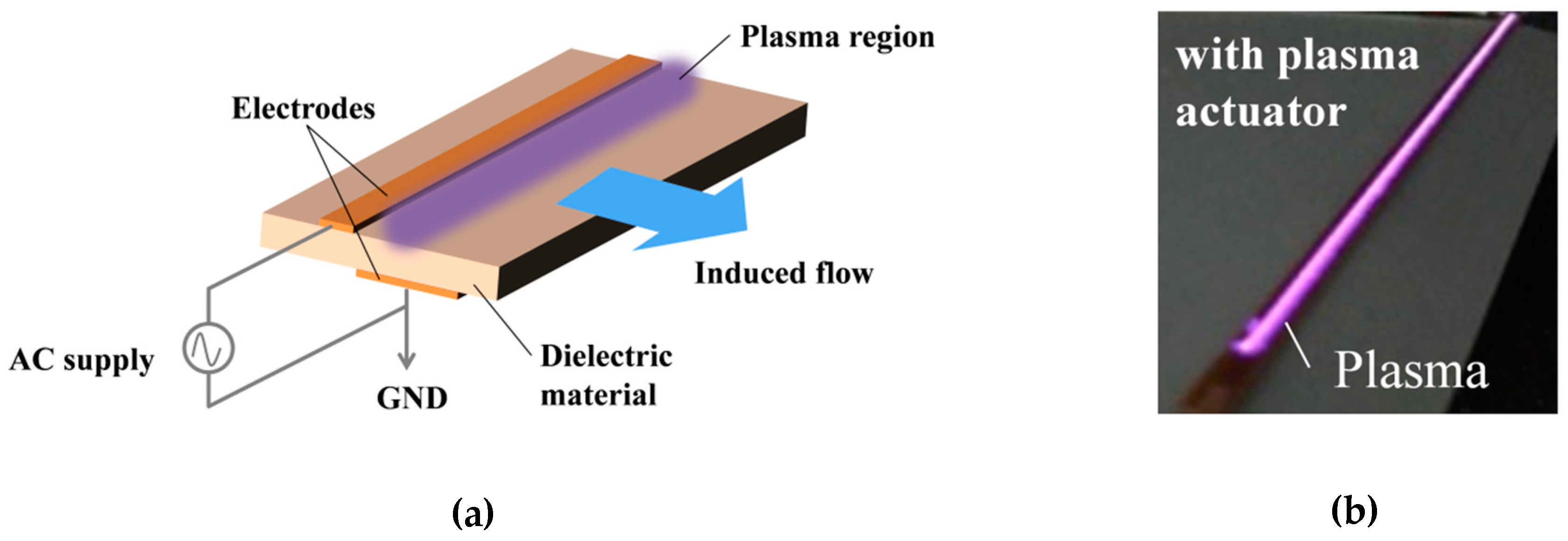
2.2. Configurations and Control Parameters of Plasma Actuator
2.3. Experimental Methodologies
2.4. Computational Methodologies
2.4.1. Governing Equations and Finite Difference Scheme
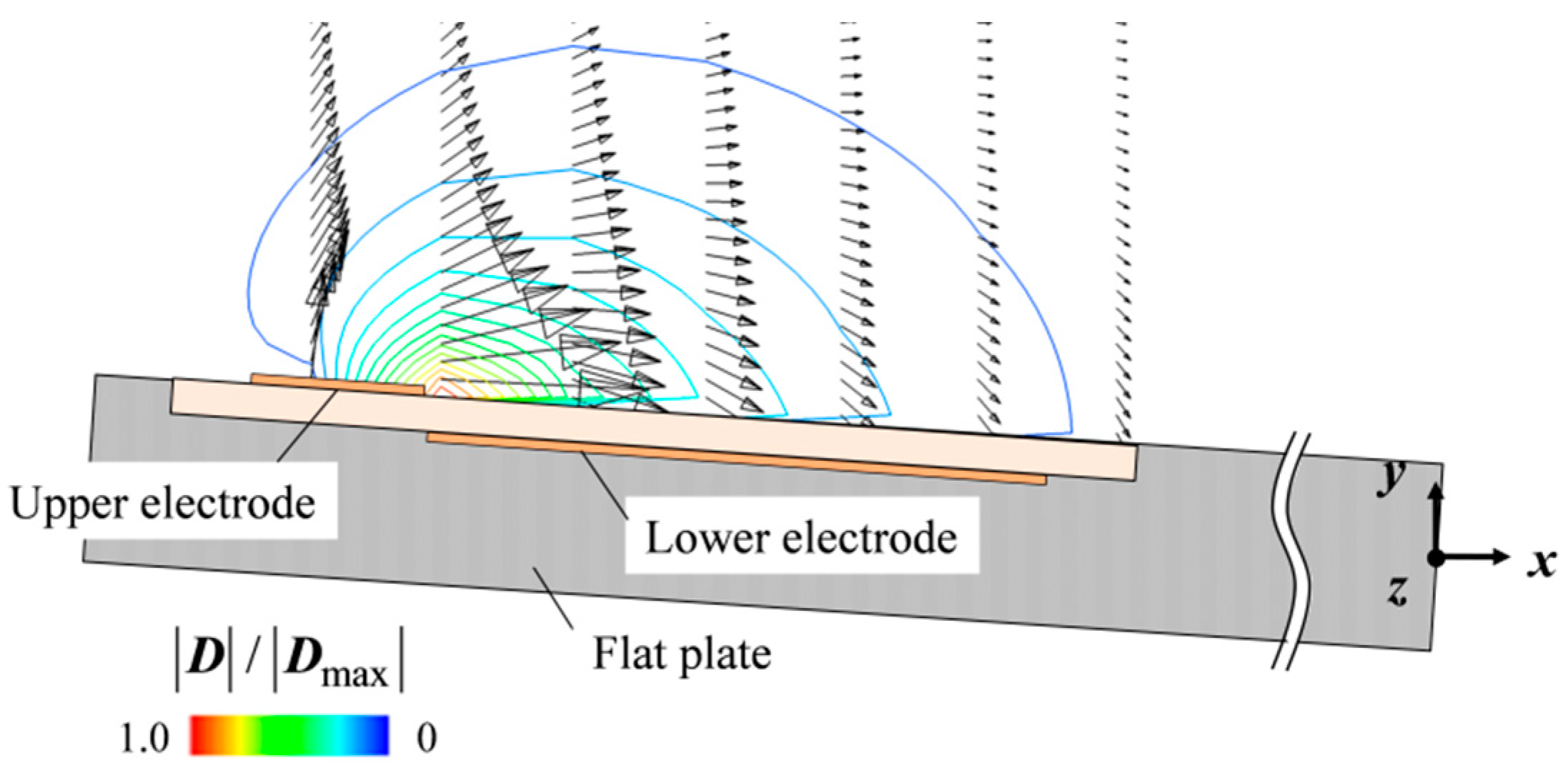
2.4.2. Body Force Generated by Plasma Actuator
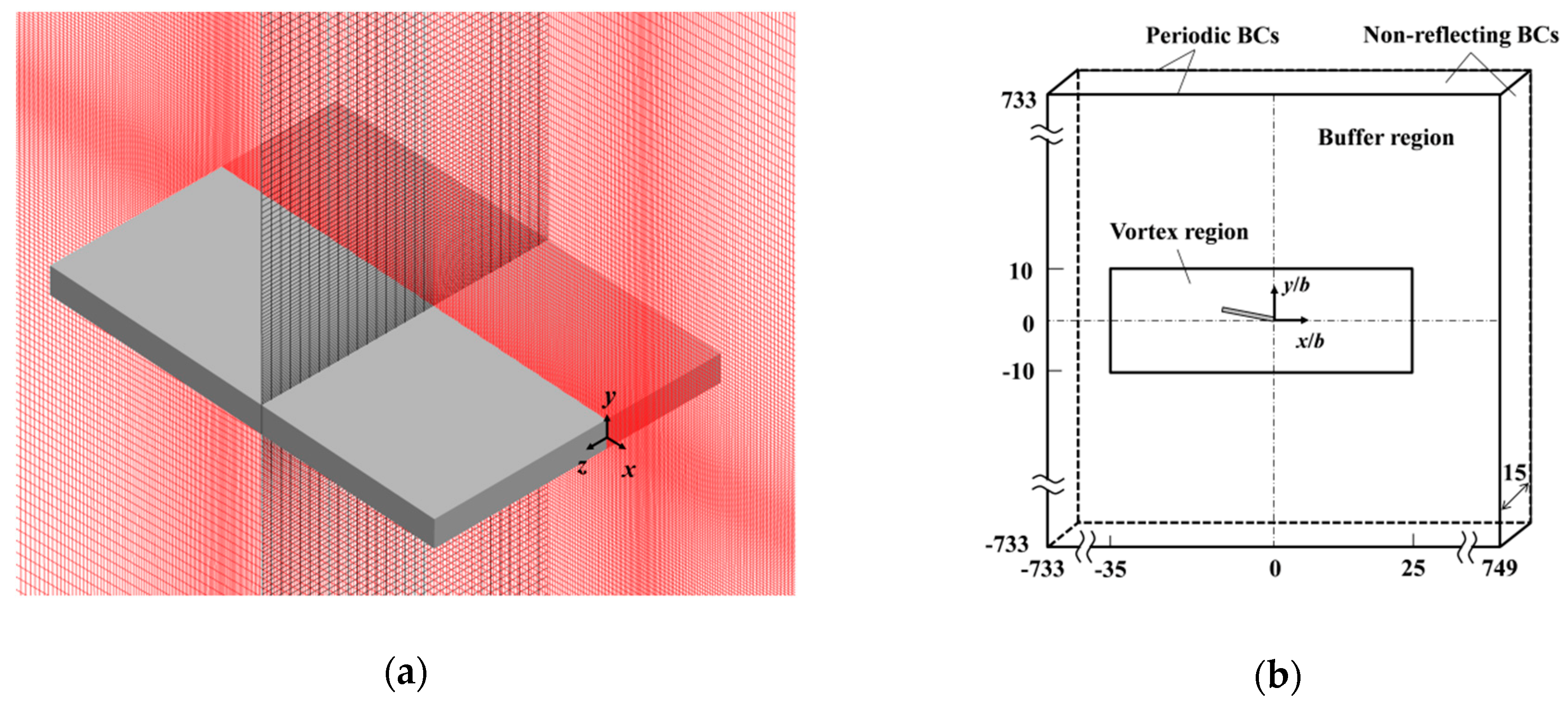
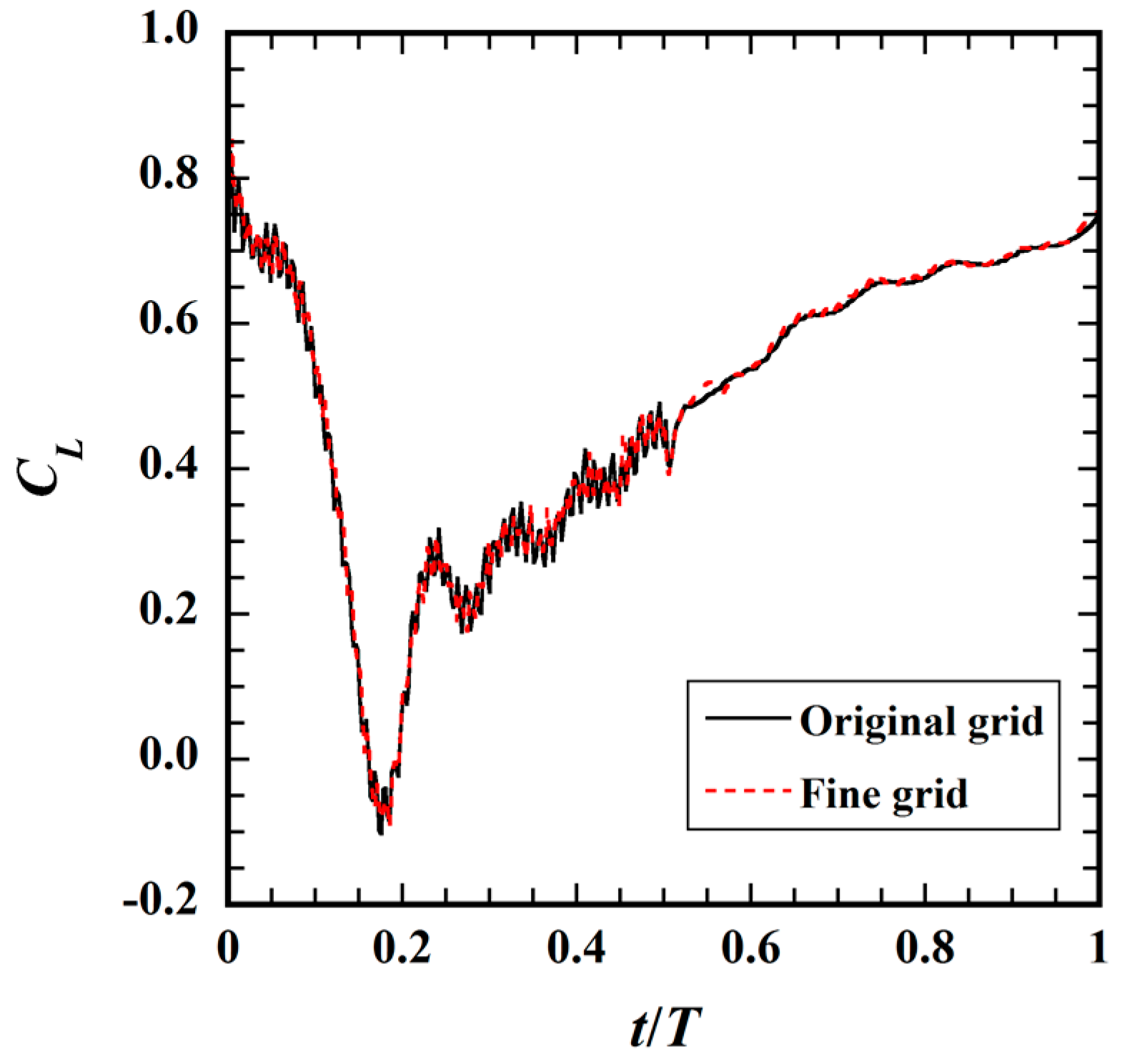
2.4.3. Computational Grids
2.4.4. Boundary Conditions and Initial Conditions
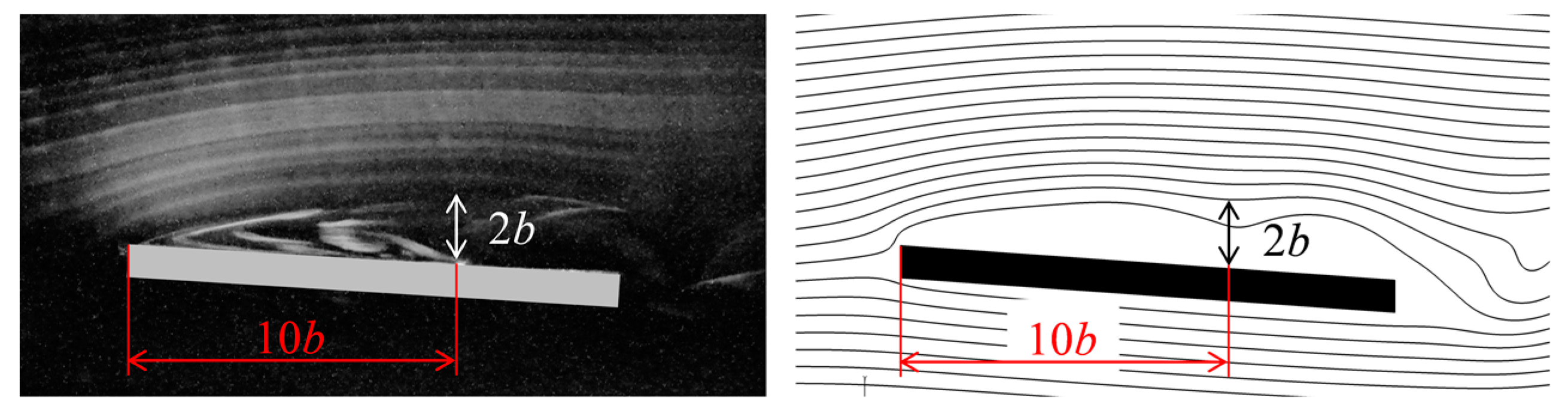
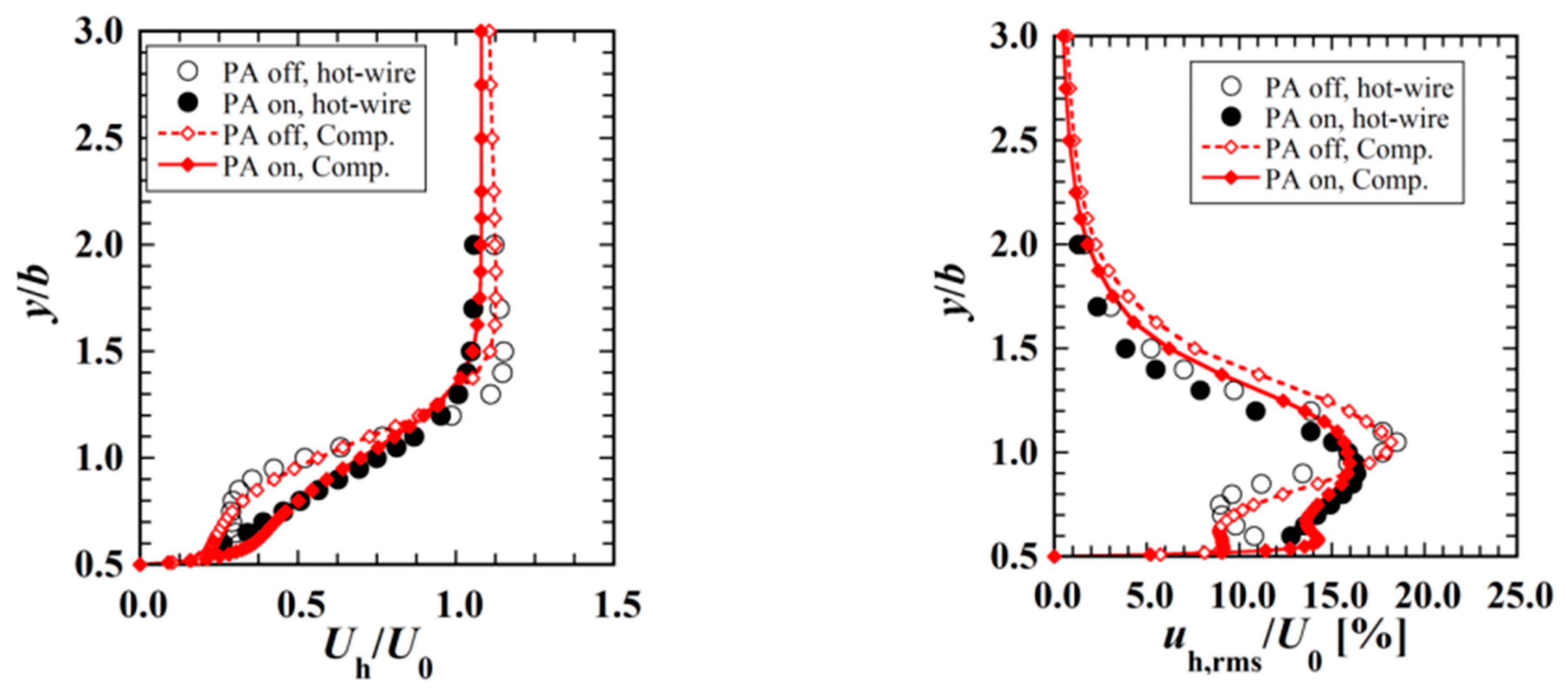
3. Comparison of the Visualized and Predicted Flow Fields
4. Results and Discussion
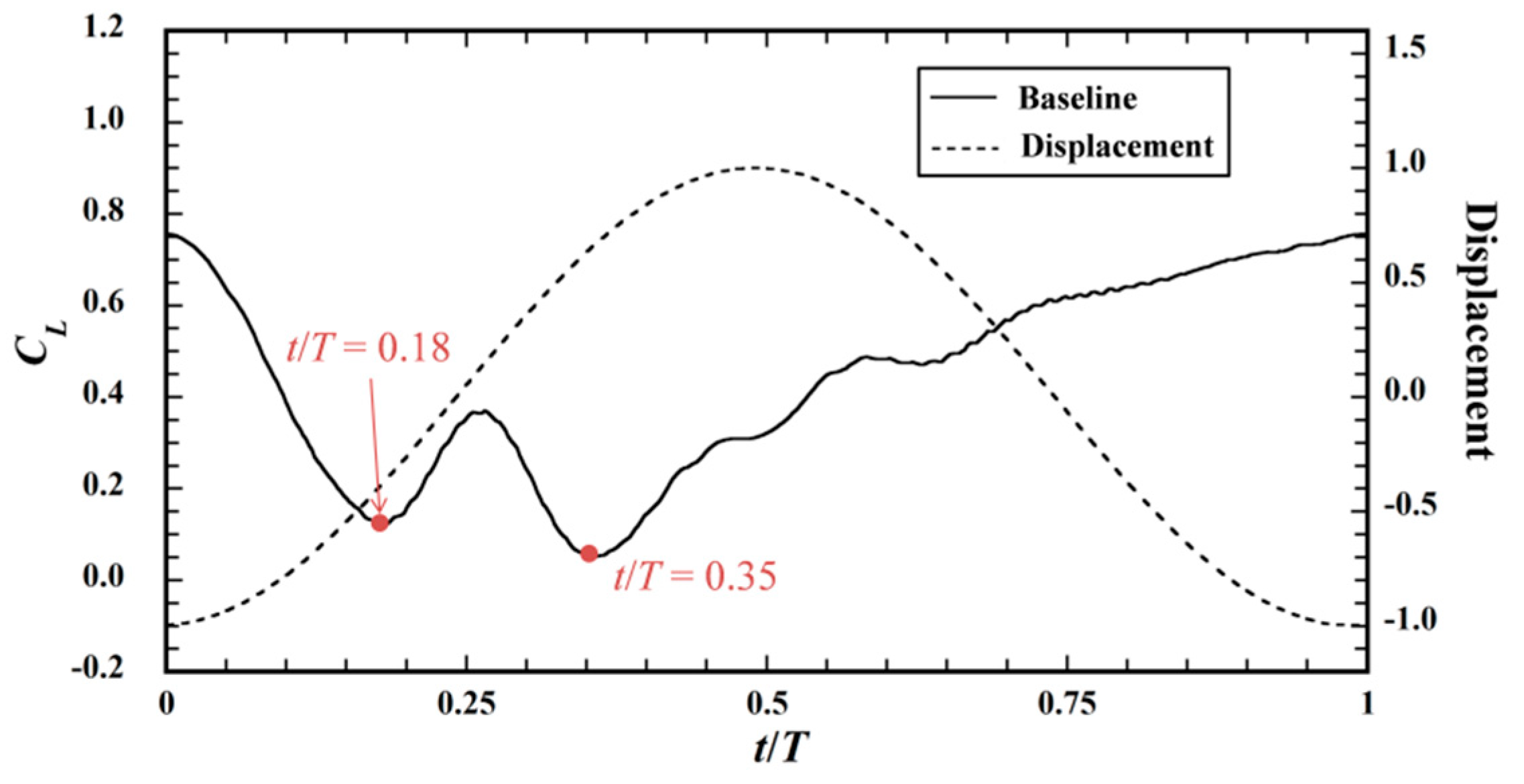
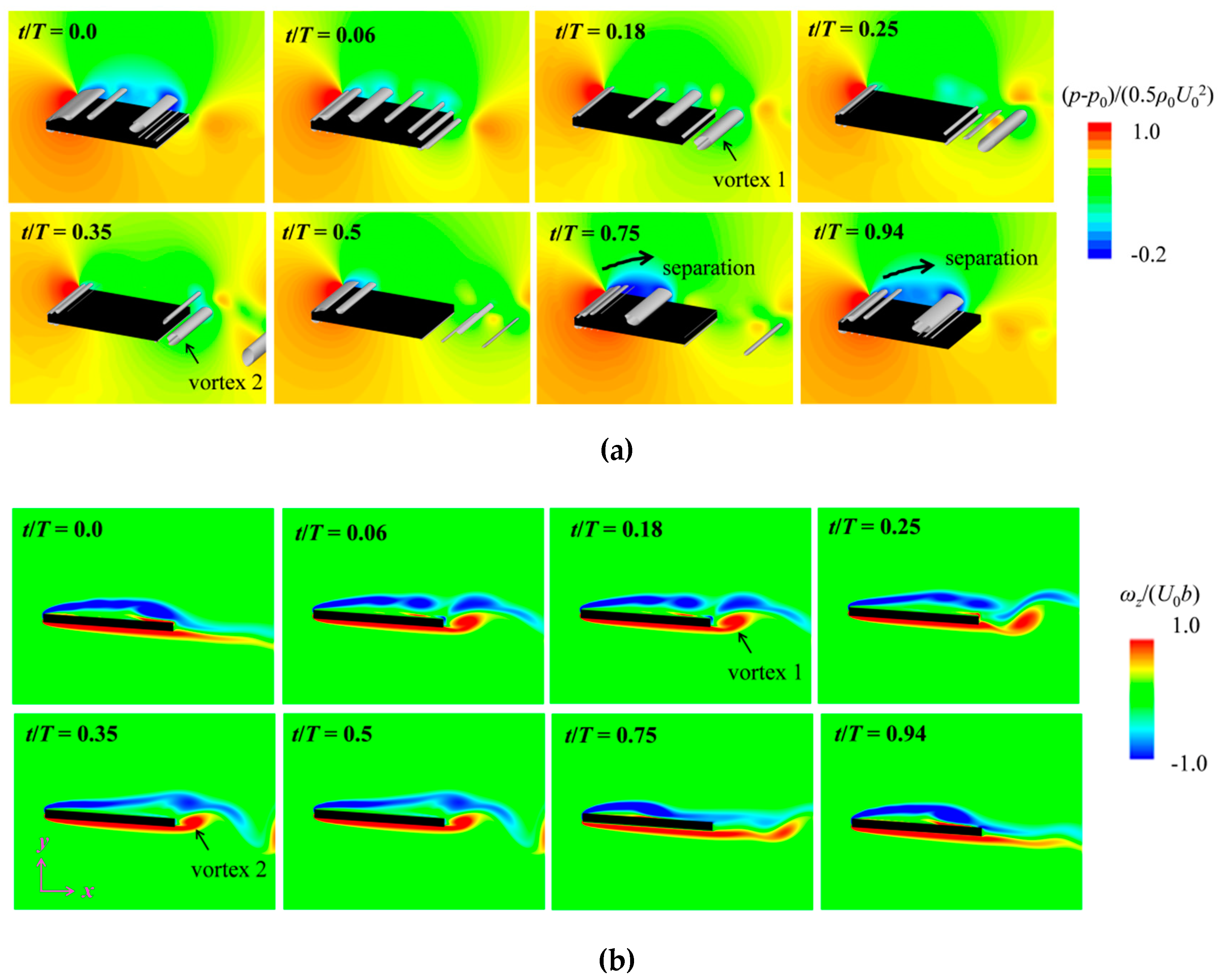
4.1. Lift Fluctuation in Baseline Flow
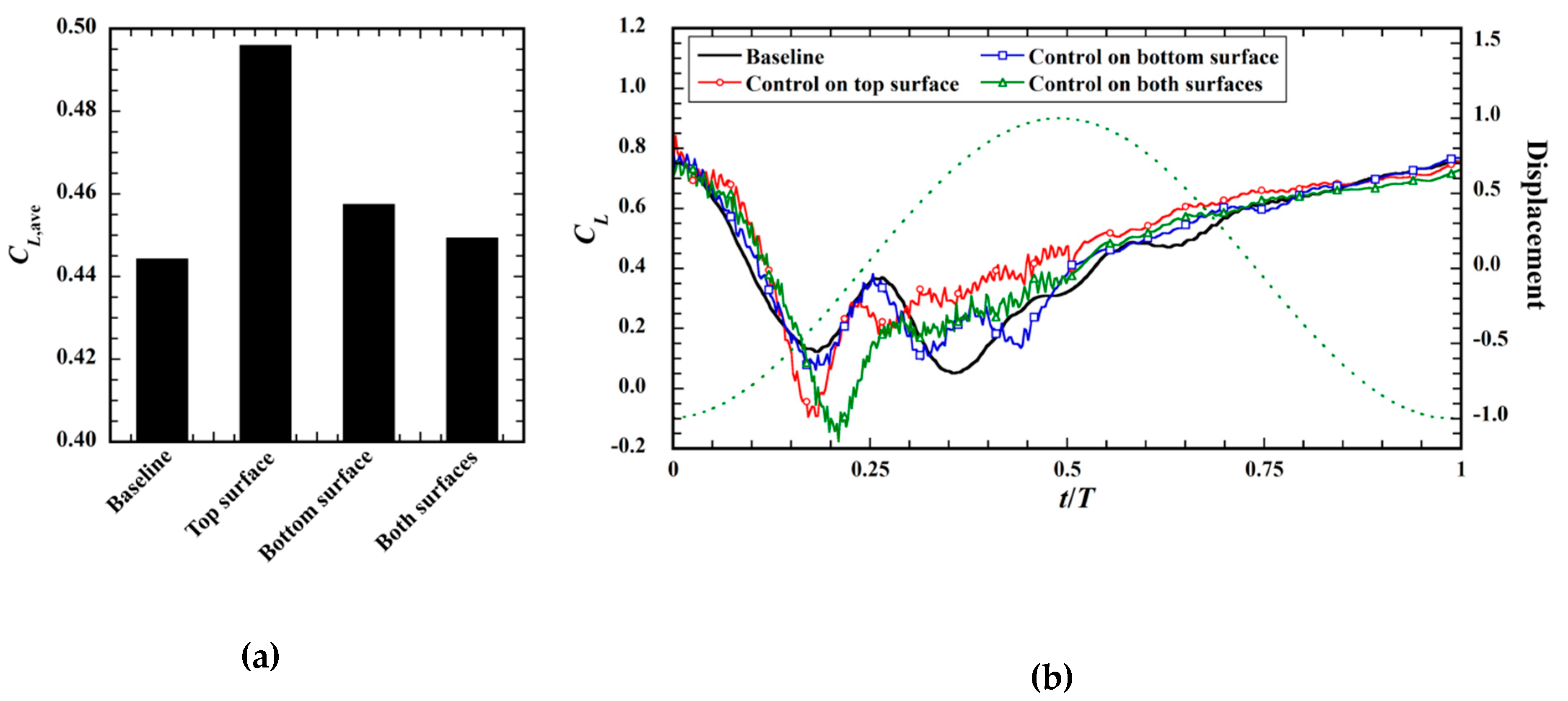
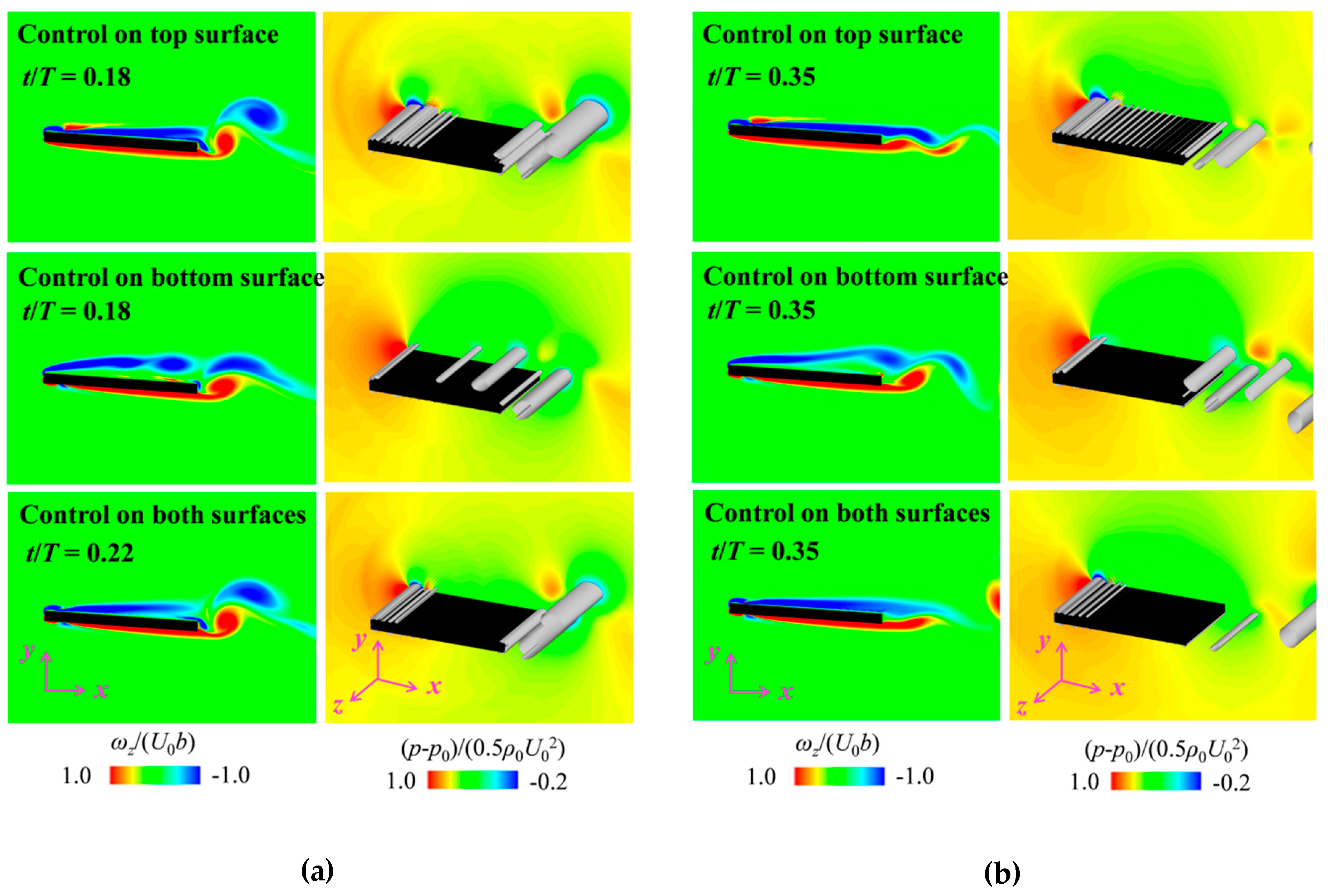
4.2. Lift Generation Mechanism by Control
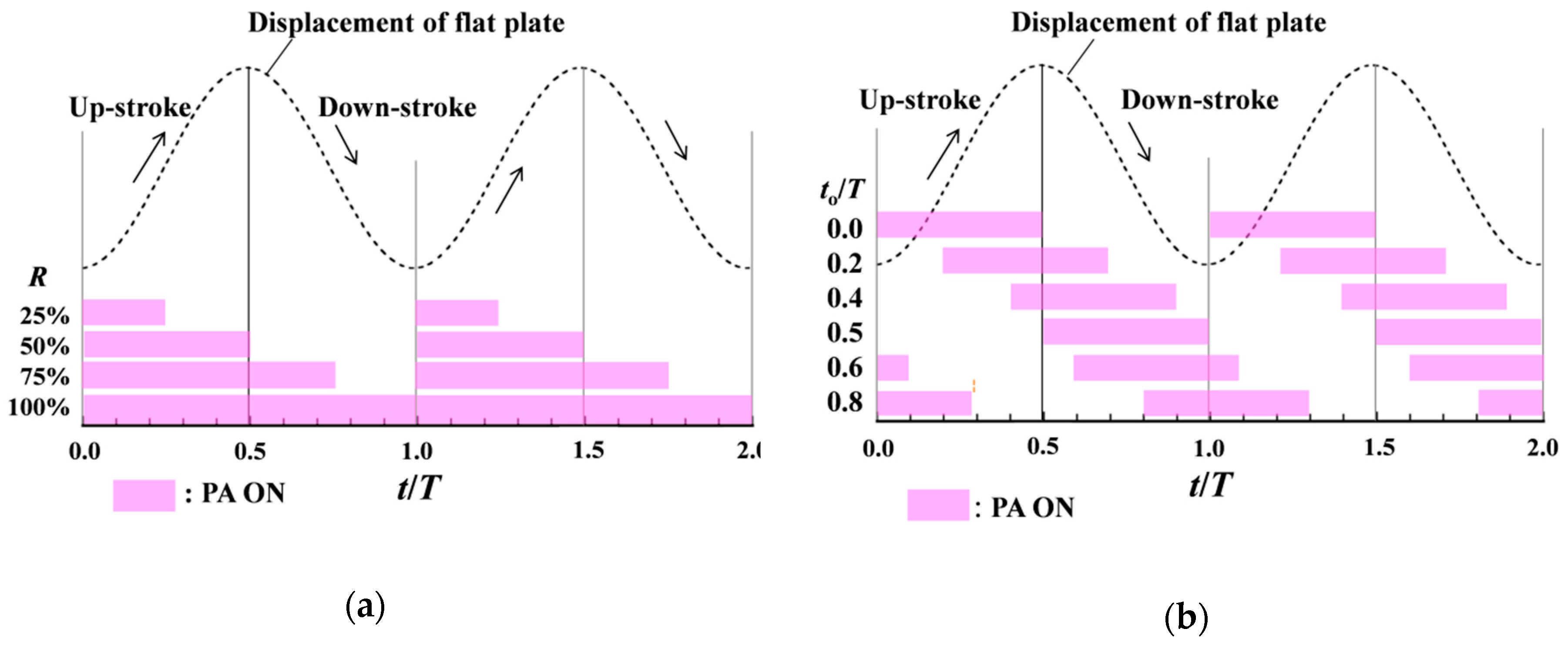
4.3. Effects of Driving Conditions
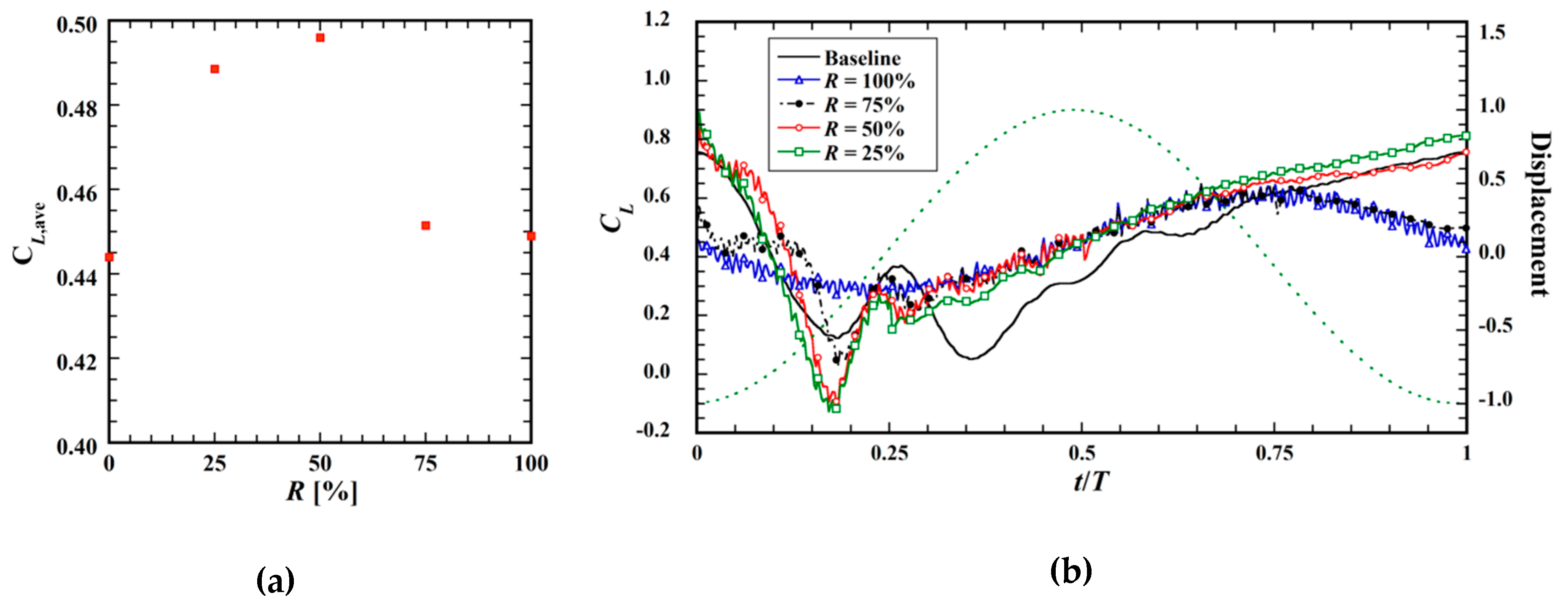
4.3.1. Effects of Driving Ratio
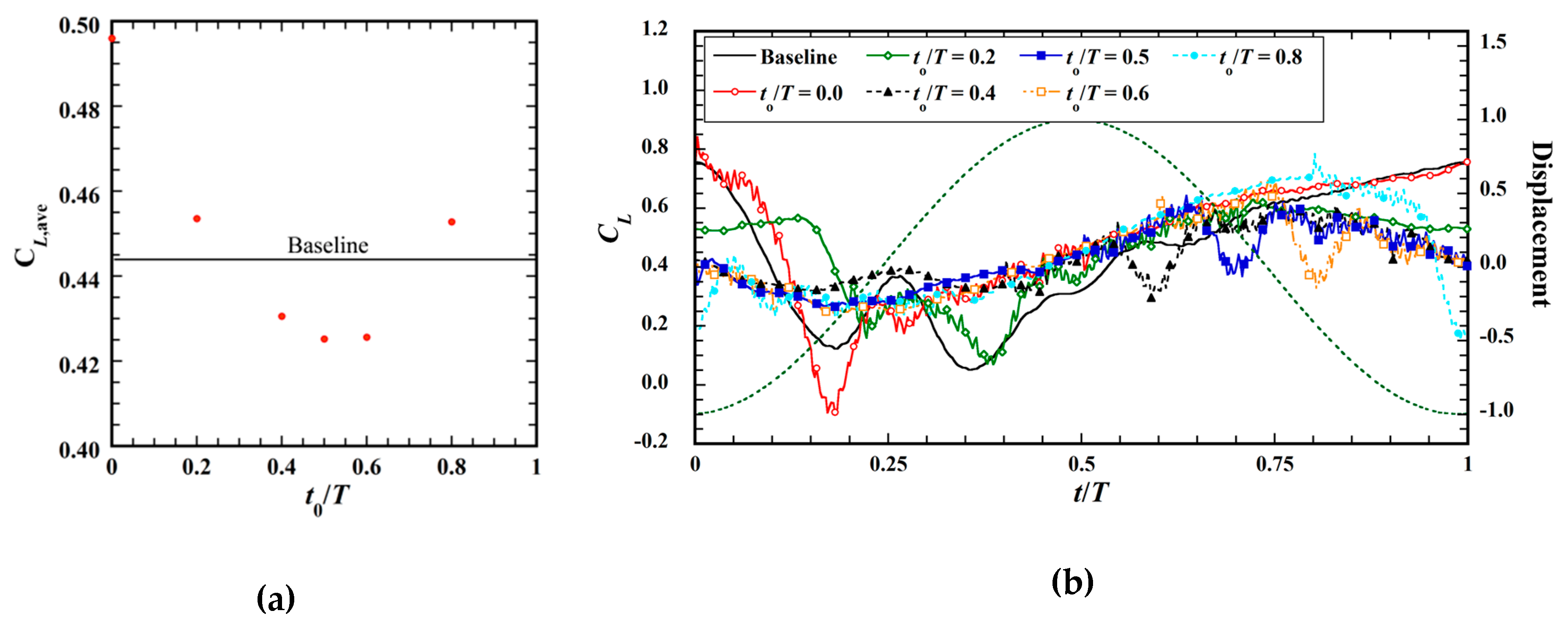
4.3.2. Effects of Time Offset
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Liu, H.; Ravi, S.; Kolomenskiy, D.; Tanaka, H. Biomechanics and biomimetics in insect-inspired flight systems. Philos. Trans. R. Soc. B 2017, 371, 20150390. [Google Scholar] [CrossRef] [PubMed]
- McMasters, J.H.; Henderson, M.L. Low-Speed Single-Element Airfoil Synthesis. 1979. Available online: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19790015719.pdf (accessed on 22 February 2019).
- Yousefi, K.; Razeghi, A. Determination of the critical Reynolds number for flow over symmetric NACA airfoils. In Proceedings of the AIAA Aerospace Sciences Meeting 2018, AIAA 2018, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Mueller, T.J. Fixed and Flapping Wing Aerodynamics for Micro Air Vehicle Applications, Progress in Astronautics and Aeronautics; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2010; Volume 195. [Google Scholar]
- Shyy, W.; Liang, Y.; Tang, J.; Viieru, D.; Liu, H. Aerodynamics of Low Reynolds Number Flyers; Cambridge University Press: New York, NY, USA, 2007. [Google Scholar]
- Liu, H. Micro air vehicles. In Encyclopedia of Aerospace Engineering; Blockrey, R., Shyy, W., Eds.; John Wiley & Sons: Chichester, UK, 2010; ISBN 978-0-470-75440-5. [Google Scholar]
- Floreano, D.; Wood, R.J. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [PubMed]
- Percin, M.; van Oudheusden, B.W.; Eisma, H.E.; Remes, B.D.W. Three-dimensional vortex wake structure of a flapping-wing micro aerial vehicle in forward flight configuration. Exp. Fluids 2014, 55, 1806. [Google Scholar] [CrossRef]
- Nakatani, Y.; Suzuki, K.; Inamuro, T. Flight control simulations of a butterfly-like flapping wing-body model by the immersed boundary-lattice Boltzmann method. Comput. Fluids 2016, 133, 103–115. [Google Scholar] [CrossRef]
- Phan, H.V.; Nguyen, Q.V.; Truong, Q.T.; Truong, T.V.; Park, H.C.; Goo, N.S.; Byun, D.; Kim, M.J. Stable vertical takeoff of an insect-mimicking flapping-wing system without guide implementing inherent pitching stability. J. Bionic Eng. 2012, 9, 391–401. [Google Scholar] [CrossRef]
- Jang, J.H.; Yang, G.-H. Design of wing root rotation mechanism for dragonfly-inspired micro air vehicle. Appl. Sci. 2018, 8, 1868. [Google Scholar] [CrossRef]
- Sivasankaran, P.N.; Ward, T.A.; Salami, E.; Viyapuri, R.; Fearday, C.J.; Johan, M.R. An experimental study of elastic properties of dragonfly-like flapping wings for use in biomimeticmicro air vehicles (BMAVs). CSAA Chin. J. Aeronaut. 2017, 30, 726–737. [Google Scholar] [CrossRef]
- Azuma, A.; Azuma, S.; Watanabe, I.; Furuta, T. Flight mechanics of a dragonfly. J. Exp. Biol. 1985, 116, 79–107. [Google Scholar]
- Thomas, A.L.; Taylor, G.K.; Srygley, R.B.; Nudds, R.L.; Bomphrey, R.J. Dragonfly flight: Free-flight and tethered flow visualizations reveal a diverse array of unsteady lift-generating mechanisms, controlled primarily via angle of attack. J. Exp. Biol. 2004, 207, 4299–4323. [Google Scholar] [CrossRef]
- Dickinson, M.H.; Lehmann, F.-O.; Sane, S.P. Wing rotation and the aerodynamic basis of insect flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef] [PubMed]
- Iida, A.; Nakamura, M.; Jida, S.; Fukawa, M.; Ogisu, H.; Mizuno, A. Correlation analysis in terms of unsteady aerodynamic force and flow field around a flying insect. Trans. JSME B 2007, 73, 1781–1789. (In Japanese) [Google Scholar] [CrossRef]
- Yousefi, K.; Saleh, R. Three-dimensional suction flow control and suction jet length optimization of NACA 0012 wing. Meccanica 2015, 50, 1481–1494. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Zhang, W.L.; Chen, Z.; Sun, X.H.; Xia, C.C. Suction control of flow separation of a low-aspect-ratio wing at low Reynolds-number. Fluid Dyn. Res. 2018, 50. [Google Scholar] [CrossRef]
- Yousefi, K.; Saleh, R.; Zahedi, P. Numerical study of blowing and suction slot geometry optimization on NACA 0012 airfoil. J. Mech. Sci. Technol. 2014, 28, 1297–1310. [Google Scholar] [CrossRef]
- Yousefi, K.; Saleh, R. The effects of trailing edge blowing on aerodynamic characteristics of the NACA 0012 airfoil and optimization of the blowing slot geometry. J. Theor. Appl. Mech. 2014, 52, 165–179. [Google Scholar]
- You, D.; Moin, P. Active control of flow separation over an airfoil using synthetic jets. J. Fluid. Struct. 2008, 24, 1349–1357. [Google Scholar] [CrossRef]
- Traub, L.W.; Miller, A.; Rediniotis, O. Effects of synthetic jet actuation on a ramping NACA 0015 airfoil. J. Aircr. 2004, 41, 1153–1162. [Google Scholar] [CrossRef]
- Velasco, D.; Mejia, O.L.; Laín, S. Numerical simulations of active flow control with synthetic jets in a Darrieus turbine. Renew. Energ. 2017, 113, 129–140. [Google Scholar] [CrossRef]
- Miyamoto, T.; Yokoyama, H.; Iida, A. Suppression of aerodynamic tonal noise from an automobile bonnet using a plasma actuator. SAE Int. J. Passeng. Cars Mech. Syst. 2017, 10, 712–720. [Google Scholar] [CrossRef]
- Singhal, A.; Castañeda, D.; Webb, N.; Samimy, M. Control of dynamic stall over a NACA0015 airfoil using plasma actuators. AIAA J. 2017, 56, 78–89. [Google Scholar] [CrossRef]
- Inasawa, A.; Ninomiya, C.; Asai, M. Suppression of total trailing-edge noise from an airfoil using a plasma actuator. AIAA J. 2013, 51, 1695–1702. [Google Scholar] [CrossRef]
- Post, M.L.; Corke, T.C. Separation control using plasma actuators: Dynamic stall vortex control on oscillating airfoil. AIAA J. 2006, 44, 3125–3135. [Google Scholar] [CrossRef]
- Roth, J.R.; Dai, X. Optimization of the aerodynamic plasma actuator as an electrohydrodynamic (EHD) electrical device. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. AIAA-2006-1203. [Google Scholar]
- Esfahani, A.; Webb, N.; Samimy, M. Stall cell formation over a post-stall airfoil: Effects of active perturbations using plasma actuators. Exp. Fluids 2018, 59. [Google Scholar] [CrossRef]
- Yokoyama, H.; Tanimoto, I.; Iida, A. Experimental tests and aeroacoustic simulations of the control of cavity tone by plasma actuators. Appl. Sci. 2017, 7, 790. [Google Scholar] [CrossRef]
- Kusumoto, M.; Yokoyama, H.; Angland, D.; Iida, A. Control of aerodynamic noise from cascade of flat plates by plasma actuators. Trans. JSME 2017, 83, 1–16. (In Japanese) [Google Scholar] [CrossRef]
- Lele, S.K. Compact finite difference schemes with spectral-like resolution. J. Comput. Phys. 1992, 103, 16–42. [Google Scholar] [CrossRef]
- Angot, P.; Bruneau, C.-H.; Frabrie, P. A penalization method to take into account obstacles in viscous flows. Numer. Math. 1999, 81, 497–520. [Google Scholar] [CrossRef]
- Liu, Q.; Vasilyev, O.V. A Brinkman penalization method for compressible flows in complex geometries. J. Comput. Phys. 2007, 227, 946–966. [Google Scholar] [CrossRef]
- Tanaka, Y.; Yokoyama, H.; Iida, A. Forced-oscillation control of sound radiated from the flow around a cascade of flat plates. J. Sound Vib. 2018, 431, 248–264. [Google Scholar] [CrossRef]
- Suzen, Y.B.; Hung, P.G.; Jacob, J.D.; Ashpis, D.E. Numerical simulations of plasma based flow control applications. In Proceedings of the 35th Fluid Dynamics Conference and Exhibit, Toronto, ON, Canada, 6–9 June 2005. AIAA-paper, No. AIAA-2005–4633. [Google Scholar]
- Kaneda, I.; Sekimoto, S.; Nonomura, T.; Asada, K.; Oyama, A.; Fujii, K. An effective three-dimensional layout of actuation body force foe separation control. Int. J. Aerosp. Eng. 2012, 2012, 786960. [Google Scholar] [CrossRef]
- Forte, M.; Jolibois, J.; Pons, J.; Moreau, E.; Touchard, G.; Cazalens, M. Optimization of a dielectric barrier discharge actuator by stationary and non-stationary measurements of the induced flow velocity: Application to airflow control. Exp. Fluids 2007, 43, 917–928. [Google Scholar] [CrossRef]




















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sato, S.; Yokoyama, H.; Iida, A. Control of Flow around an Oscillating Plate for Lift Enhancement by Plasma Actuators. Appl. Sci. 2019, 9, 776. https://doi.org/10.3390/app9040776
Sato S, Yokoyama H, Iida A. Control of Flow around an Oscillating Plate for Lift Enhancement by Plasma Actuators. Applied Sciences. 2019; 9(4):776. https://doi.org/10.3390/app9040776
Chicago/Turabian StyleSato, Saya, Hiroshi Yokoyama, and Akiyoshi Iida. 2019. "Control of Flow around an Oscillating Plate for Lift Enhancement by Plasma Actuators" Applied Sciences 9, no. 4: 776. https://doi.org/10.3390/app9040776
APA StyleSato, S., Yokoyama, H., & Iida, A. (2019). Control of Flow around an Oscillating Plate for Lift Enhancement by Plasma Actuators. Applied Sciences, 9(4), 776. https://doi.org/10.3390/app9040776