The Potential of Multi- and HyperSpectral Air- and Spaceborne Sensors to Detect Crude Oil Hydrocarbon in Soils Long after a Contamination Event


Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
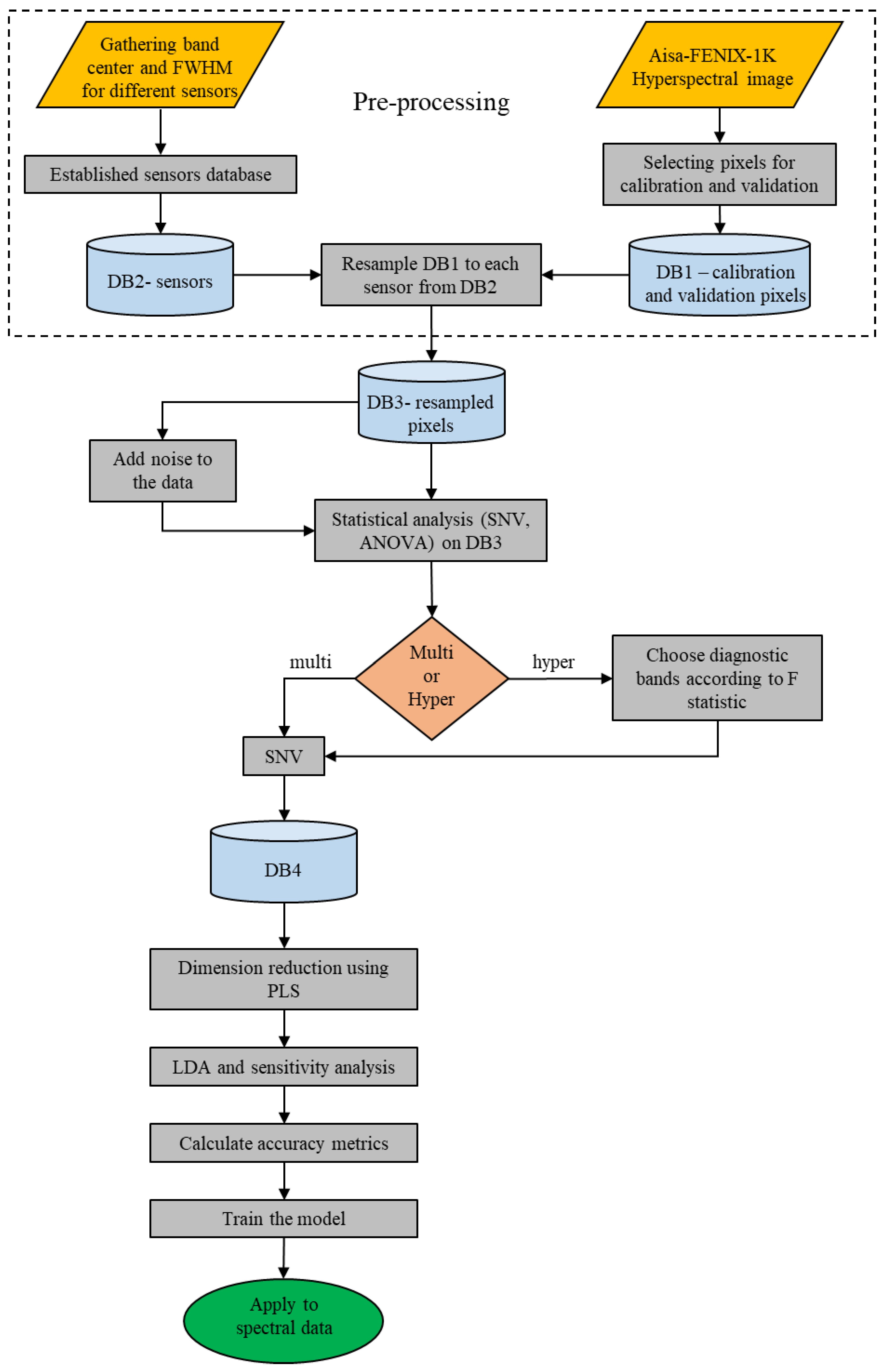
2.1. Study Flow Chart
2.2. Using a Machine Learning-Based Method
2.3. Sensors Database
2.4. Spectral Resampling
2.5. Calibrate the Machine Learning Model
2.6. Validating and Testing the Model
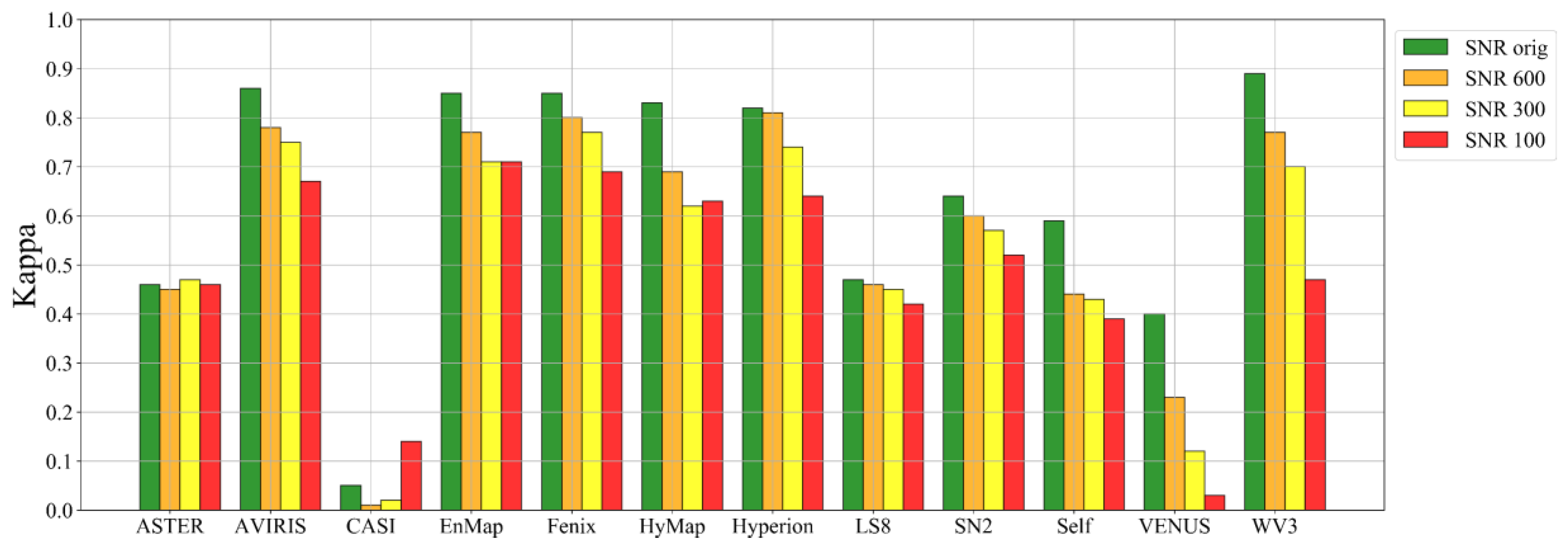
2.7. Add Noise to the Data
2.8. Spatial Resampling
3. Results
3.1. Spectral Bands Selection
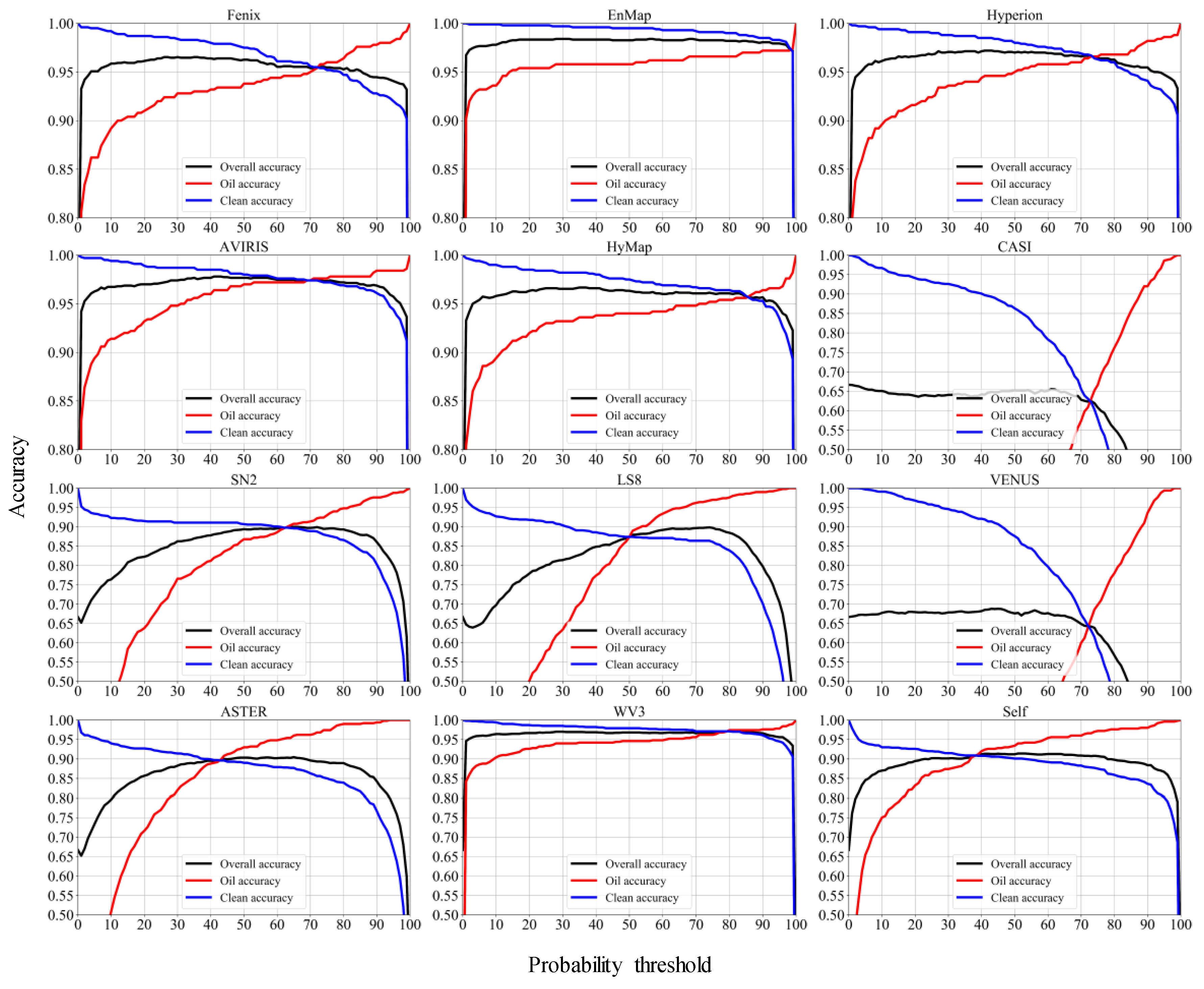
3.2. Selecting the Optimal Probability Threshold
3.3. Cross-Validation and Validation
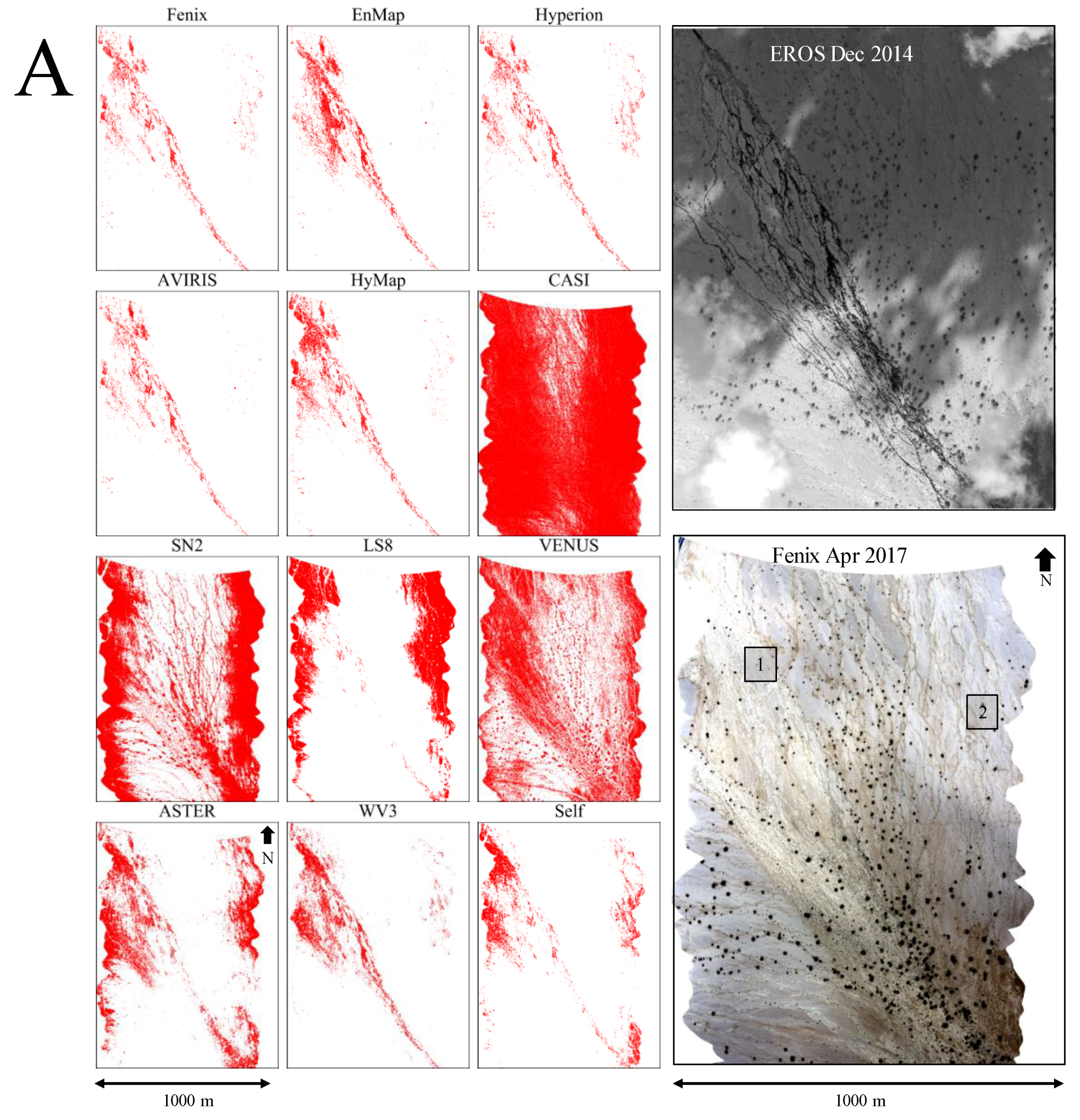
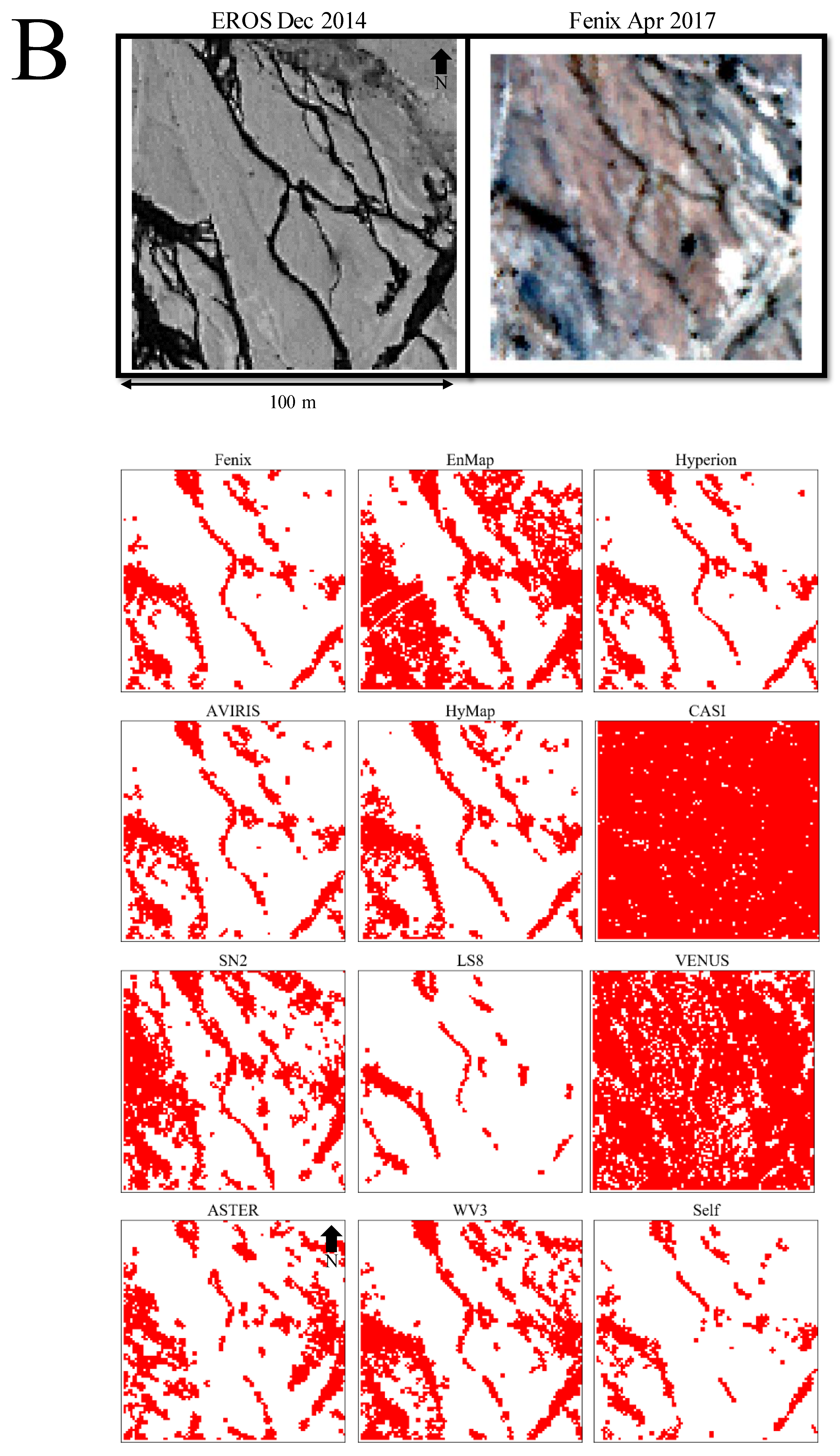
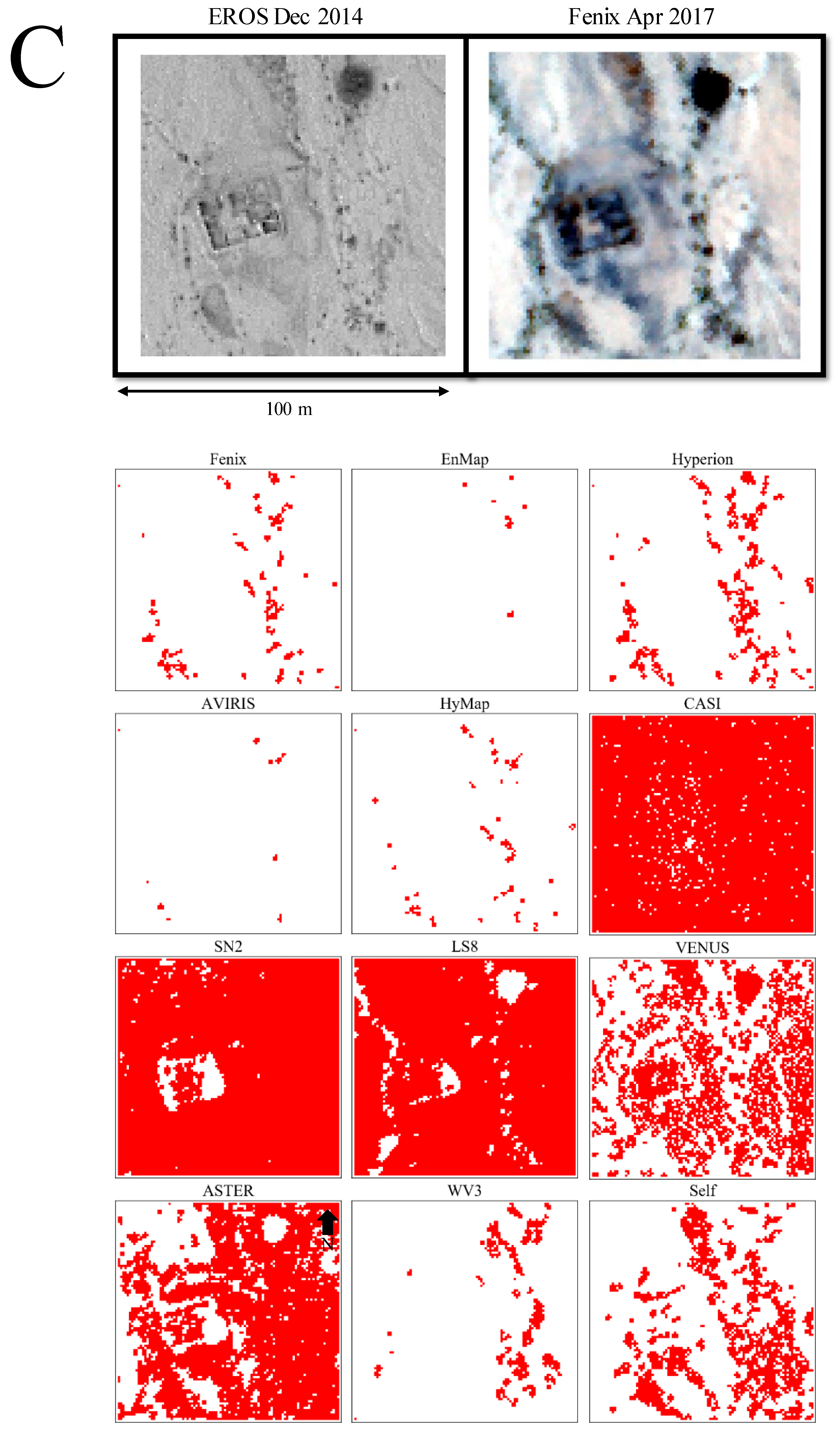
3.4. Model Predictions on the Image
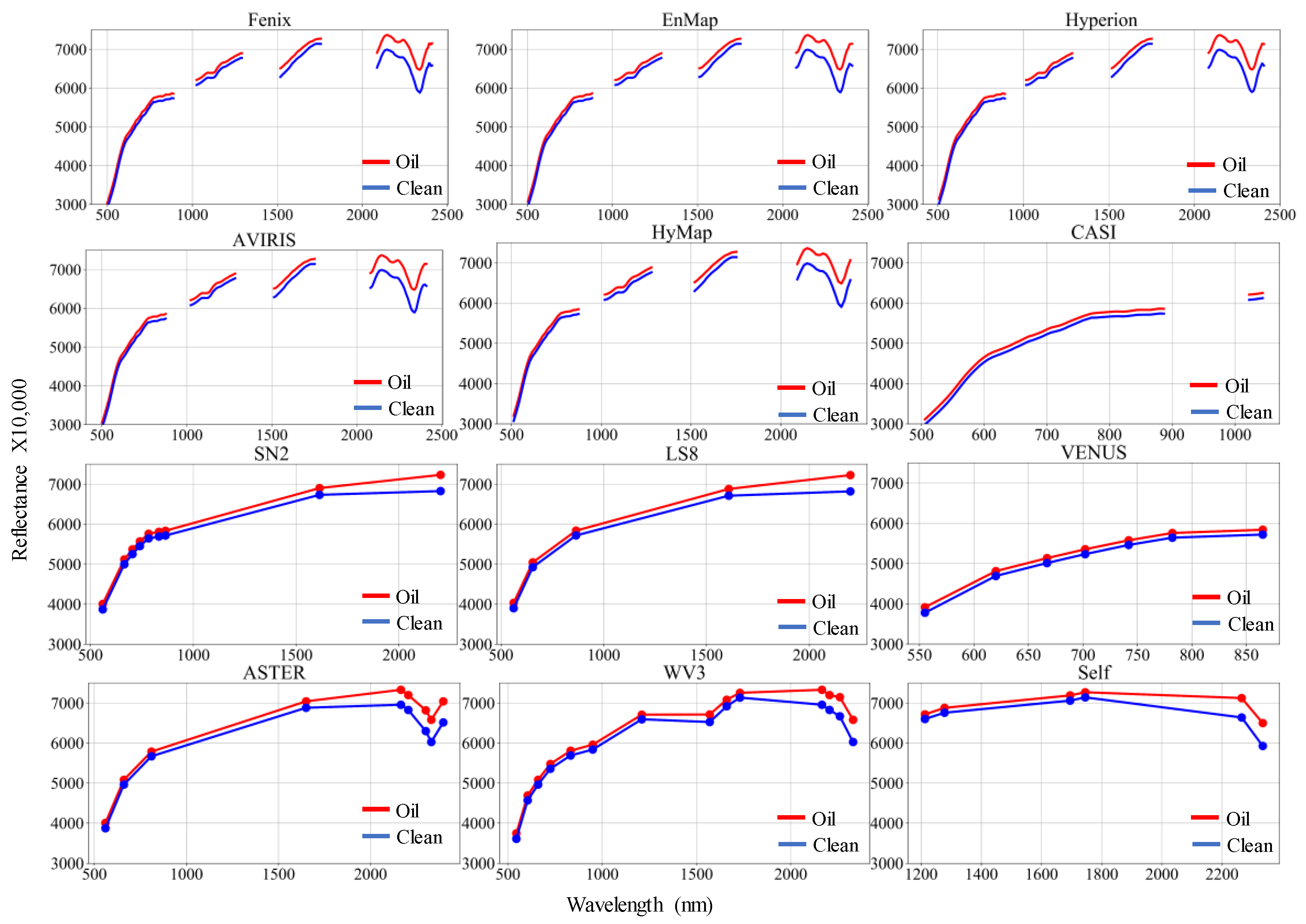
3.4.1. Spectral Resampling
3.4.2. Spatial Resampling
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cloutis, E.A. Spectral reflectance properties of hydrocarbons: Remote-sensing implications. Science 1989, 245, 165–168. [Google Scholar] [CrossRef]
- Ellis, J.M.; Davis, H.H.; Zamudio, J.A. Exploring for onshore oil seeps with hyperspectral imaging. Oil Gas J. 2001, 99, 49–56. [Google Scholar]
- Horig, B.; Kuhn, F.; Oschutz, F.; Lehmann, F. HyMap hyperspectral remote sensing to detect hydrocarbons. Int. J. Remote Sens. 2001, 22, 1413–1422. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Couvillion, B.R.; Holloway, J.M.; Roberts, D.A.; Ustin, S.L.; Peterson, S.H.; Khanna, S.; Piazza, S.C. Spectroscopic remote sensing of the distribution and persistence of oil from the Deepwater Horizon spill in Barataria Bay marshes. Remote Sens. Environ. 2013, 129, 210–230. [Google Scholar] [CrossRef]
- Pabon, R.E.C.; de Souza Filho, C.R.; de Oliveira, W.J. Reflectance and imaging spectroscopy applied to detection of petroleum hydrocarbon pollution in bare soils. Sci. Total Environ. 2019, 649, 1224–1236. [Google Scholar] [CrossRef]
- Asadzadeh, S.; de Souza Filho, C.R. Investigating the capability of WorldView-3 superspectral data for direct hydrocarbon detection. Remote Sens. Environ. 2016, 173, 162–173. [Google Scholar] [CrossRef]
- Pelta, R.; Carmon, N.; Ben-Dor, E. A machine learning approach to detect crude oil contamination in a real scenario using hyperspectral remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101901. [Google Scholar] [CrossRef]
- Guanter, L.; Kaufmann, H.; Segl, K.; Foerster, S.; Rogass, C.; Chabrillat, S.; Kuester, T.; Hollstein, A.; Rossner, G.; Chlebek, C.; et al. The EnMAP Spaceborne Imaging Spectroscopy Mission for Earth Observation. Remote Sens. 2015, 7, 8830–8857. [Google Scholar] [CrossRef]
- Natale, V.G.; Kafri, A.; Tidhar, G.A.; Chen, M.; Feingersh, T.; Sagi, E.; Cisbani, A.; Baroni, M.; Labate, D.; Nadler, R.; et al. SHALOM–Space-borne hyperspectral applicative land and ocean mission. In Proceedings of the 2013 5th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Gainesville, FL, USA, 26–28 June 2013; pp. 1–4. [Google Scholar]
- Pignatti, S.; Palombo, A.; Pascucci, S.; Romano, F.; Santini, F.; Simoniello, T.; Umberto, A.; Vincenzo, C.; Acito, N.; Diani, M.; et al. The PRISMA hyperspectral mission: Science activities and opportunities for agriculture and land monitoring. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Victoria, Australia, 21–26 July 2013; pp. 4558–4561. [Google Scholar]
- Iwasaki, A.; Ohgi, N.; Tanii, J.; Kawashima, T.; Inada, H. Hyperspectral Imager Suite (HISUI)-Japanese hyper-multi spectral radiometer. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium, Sendai, Japan, 1–5 August 2011; pp. 1025–1028. [Google Scholar]
- Nieke, J.; Rast, M. Towards the Copernicus Hyperspectral Imaging Mission For The Environment (CHIME). In Proceedings of the IGARSS 2018–2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 157–159. [Google Scholar]
- Barnes, R.J.; Dhanoa, M.S.; Lister, S.J. Standard Normal Variate Transformation and De-trending of Near-Infrared Diffuse Reflectance Spectra. Appl. Spectrosc. AS 1989, 43, 772–777. [Google Scholar] [CrossRef]
- Wold, S.; Sjostrom, M.; Eriksson, L. PLS-regression: a basic tool of chemometrics. Chemom. Intell. Lab. Syst. 2001, 58, 109–130. [Google Scholar] [CrossRef]
- Fisher, R.A. The Use of Multiple Measurements in Taxonomic Problems. Ann. Eugen. 1936, 7, 179–188. [Google Scholar] [CrossRef]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Rodger, A.; Laukamp, C.; Haest, M.; Cudahy, T. A simple quadratic method of absorption feature wavelength estimation in continuum removed spectra. Remote Sens. Environ. 2012, 118, 273–283. [Google Scholar] [CrossRef]
- Davies, G.E.; Calvin, W.M. Mapping acidic mine waste with seasonal airborne hyperspectral imagery at varying spatial scales. Environ. Earth Sci. 2017, 76, 432. [Google Scholar] [CrossRef]
- Feingersh, T.; Dor, E.B. SHALOM–A Commercial Hyperspectral Space Mission. In Optical Payloads for Space Missions; Feingersh, T., Dor, E.B., Qian, S.-E., Eds.; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2015; pp. 247–263. [Google Scholar]
- Khanna, S.; Santos, M.J.; Ustin, S.L.; Koltunov, A.; Kokaly, R.F.; Roberts, D.A. Detection of Salt Marsh Vegetation Stress and Recovery after the Deepwater Horizon Oil Spill in Barataria Bay, Gulf of Mexico Using AVIRIS Data. PLoS ONE 2013, 8, e78989. [Google Scholar] [CrossRef]
- Peterson, S.H.; Roberts, D.A.; Beland, M.; Kokaly, R.F.; Ustin, S.L. Oil detection in the coastal marshes of Louisiana using MESMA applied to band subsets of AVIRIS data. Remote Sens. Environ. 2015, 159, 222–231. [Google Scholar] [CrossRef]
- Scafutto, R.D.M.; de Souza Filho, C.R.; de Oliveira, W.J. Hyperspectral remote sensing detection of petroleum hydrocarbons in mixtures with mineral substrates: Implications for onshore exploration and monitoring. ISPRS J. Photogramm. Remote Sens. 2017, 128, 146–157. [Google Scholar] [CrossRef]
- Scafutto, R.D.M.; de Souza Filho, C.R.; Rivard, B. Characterization of mineral substrates impregnated with crude oils using proximal infrared hyperspectral imaging. Remote Sens. Environ. 2016, 179, 116–130. [Google Scholar] [CrossRef]
- Kuhn, F.; Oppermann, K.; Horig, B. Hydrocarbon Index–An algorithm for hyperspectral detection of hydrocarbons. Int. J. Remote Sens. 2004, 25, 2467–2473. [Google Scholar] [CrossRef]
- Ogen, Y.; Neumann, C.; Chabrillat, S.; Goldshleger, N.; Ben Dor, E. Evaluating the detection limit of organic matter using point and imaging spectroscopy. Geoderma 2018, 321, 100–109. [Google Scholar] [CrossRef]
- Pelta, R.; Ben-Dor, E. Assessing the detection limit of petroleum hydrocarbon in soils using hyperspectral remote-sensing. Remote Sens. Environ. 2019, 224, 145–153. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Name in this Study | Sensor Full Name | Type | Number of Spectral Bands * | Spectral Range (nm) * | Source |
|---|---|---|---|---|---|
| Fenix | AisaFENIX 1K | Hyperspectral airborne | 385 | 375–2500 | http://www.specim.fi/downloads/AisaFenix-1K-ver1-2016.pdf |
| Hyperion | High resolution hyperspectral imager | Hyperspectral spaceborne | 242 | 355–2500 | https://www.indexdatabase.de/db/s-single.php?id=36 |
| AVIRIS | The airborne visible/infrared imaging spectrometer | Hyperspectral airborne | 224 | 374–2500 | https://directory.eoportal.org/web/eoportal/airborne-sensors/aviris |
| HyMap | Hyperspectral Mapper | Hyperspectral airborne | 126 | 453–2484 | https://web.archive.org/web/20090410174538/http://www.aigllc.com/pdf/EARSEL98_HyMap.pdf |
| EnMap | The Environmental Mapping and Analysis Program | Hyperspectral spaceborne | 244 | 424–2446 | https://pdfs.semanticscholar.org/7d2e/c51c43d94a54ae01cab8d5d922c1a6684118.pdf |
| CASI | Compact Airborne Spectrographic Imager | Hyperspectral airborne | 97 | 380–1050 | http://www.itres.com/wp-content/uploads/2014/10/CASI-1500.pdf |
| ASTER | Advanced Spaceborne Thermal Emission and Reflection Radiometer | Multispectral space borne | 9 | 560–2430 | https://www.satimagingcorp.com/satellite-sensors/other-satellite-sensors/aster/ |
| SN2 | Sentinel-2 | Multispectral spaceborne | 11 | 442–2202 | https://earth.esa.int/web/sentinel/technical-guides/sentinel-2-msi |
| VENUS ** | Vegetation and Environment monitoring on a New Micro-Satellite | Multispectral spaceborne | 11 | 420–920 | https://directory.eoportal.org/web/eoportal/satellite-missions/v-w-x-y-z/venus |
| LS8 | Landsat-8 | Multispectral spaceborne | 7 | 443–2200 | https://directory.eoportal.org/web/eoportal/satellite-missions/l/landsat-8-ldcm#sensors |
| WV3 | World View-3 | Multispectral spaceborne | 16 | 425–2330 | https://directory.eoportal.org/web/eoportal/satellite-missions/v-w-x-y-z/worldview-3 |
| Self | Self | Multispectral theoretical | 6 | 1200–2350 | Table 2 in this paper |
| Band Name | Min (nm) | Max (nm) | Band Center (nm) | FWHM (nm) |
|---|---|---|---|---|
| SWIR-1 | 1196.25 | 1228.75 | 1212.5 | 32.5 |
| SWIR-2 | 1261.25 | 1293.75 | 1277.5 | 32.5 |
| SWIR-3 | 1682.5 | 1707.5 | 1695 | 25 |
| SWIR-4 | 1732.5 | 1757.5 | 1745 | 25 |
| SWIR-5 | 2247.5 | 2282.5 | 2265 | 35 |
| SWIR-6 | 2317.5 | 2352.5 | 2335 | 35 |
| Sensor. | Type | Best Threshold | Overall Accuracy | Sensitivity | Specificity | Kappa | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| Cal | Val | Cal | Val | Cal | Val | Cal | Val | |||
| Fenix | Hyperspectral | 72 | 0.95 | 0.93 | 0.95 | 0.91 | 0.96 | 0.94 | 0.90 | 0.85 |
| EnMap | Hyperspectral | 98 | 0.97 | 0.93 | 0.97 | 0.93 | 0.98 | 0.94 | 0.94 | 0.85 |
| Hyperion | Hyperspectral | 73 | 0.97 | 0.92 | 0.97 | 0.91 | 0.97 | 0.92 | 0.93 | 0.82 |
| AVIRIS | Hyperspectral | 69 | 0.97 | 0.94 | 0.97 | 0.91 | 0.97 | 0.95 | 0.94 | 0.86 |
| HyMap | Hyperspectral | 85 | 0.96 | 0.92 | 0.96 | 0.90 | 0.96 | 0.94 | 0.91 | 0.83 |
| CASI | Hyperspectral | 73 | 0.63 | 0.50 | 0.62 | 0.69 | 0.63 | 0.40 | 0.23 | 0.08 |
| SN2 | Multispectral | 63 | 0.90 | 0.80 | 0.90 | 0.88 | 0.90 | 0.76 | 0.78 | 0.59 |
| LS8 | Multispectral | 50 | 0.87 | 0.75 | 0.87 | 0.76 | 0.87 | 0.74 | 0.73 | 0.47 |
| VENUS | Multispectral | 72 | 0.64 | 0.72 | 0.64 | 0.65 | 0.64 | 0.76 | 0.26 | 0.40 |
| ASTER | Multispectral | 43 | 0.90 | 0.76 | 0.90 | 0.66 | 0.90 | 0.80 | 0.78 | 0.46 |
| WV3 | Multispectral | 79 | 0.97 | 0.95 | 0.97 | 0.93 | 0.97 | 0.96 | 0.94 | 0.89 |
| Self | Multispectral | 38 | 0.91 | 0.84 | 0.91 | 0.77 | 0.91 | 0.87 | 0.80 | 0.64 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pelta, R.; Ben-Dor, E. The Potential of Multi- and HyperSpectral Air- and Spaceborne Sensors to Detect Crude Oil Hydrocarbon in Soils Long after a Contamination Event. Appl. Sci. 2019, 9, 5151. https://doi.org/10.3390/app9235151
Pelta R, Ben-Dor E. The Potential of Multi- and HyperSpectral Air- and Spaceborne Sensors to Detect Crude Oil Hydrocarbon in Soils Long after a Contamination Event. Applied Sciences. 2019; 9(23):5151. https://doi.org/10.3390/app9235151
Chicago/Turabian StylePelta, Ran, and Eyal Ben-Dor. 2019. "The Potential of Multi- and HyperSpectral Air- and Spaceborne Sensors to Detect Crude Oil Hydrocarbon in Soils Long after a Contamination Event" Applied Sciences 9, no. 23: 5151. https://doi.org/10.3390/app9235151
APA StylePelta, R., & Ben-Dor, E. (2019). The Potential of Multi- and HyperSpectral Air- and Spaceborne Sensors to Detect Crude Oil Hydrocarbon in Soils Long after a Contamination Event. Applied Sciences, 9(23), 5151. https://doi.org/10.3390/app9235151