1. Introduction
In the past few decades, the use of renewable energy sources has increased significantly, due a combination of a gradual paradigm shift (driven by environmental degradation and the depletion of conventional fossil fuel reserves) and more competitive pricing in key technologies, in particular, solar photovoltaic and utility-scale wind. Regarding the latter, it is worth mentioning that the global installed wind power capacity in 2017 was 500 GW [
1], and it is expected to reach 1013 GW by 2025 [
2].
Small-scale wind energy generation, on the other hand, has remained a niche technology, in spite of its significant potential for supplying small and isolated loads [
3], households, or off-grid communities with no access to the electricity distribution network, and it contributes to clean energy goals in residential, urban [
4], and industrial settings [
5]. Small-scale wind energy generation is often recognized to be a major component in overcoming energy poverty [
6], both on a stand-alone basis and in conjunction with other generators, such as solar photovoltaic, diesel generators, and storage [
7]. Small-scale wind energy generation is ideal for balancing solar generation and reducing the size of backup generators (if any) and storage facilities in hybrid systems. However, given the dramatic reduction observed over the last decade in the cost of solar photovoltaic panels and systems [
8], the pressure for cost reduction in small wind systems has risen considerably. Though small wind turbines do not necessarily have to compete directly with solar photovoltaic panels and systems, but rather with the storage units and systems that they are likely to replace or downsize, the need for building cost-effective small wind turbines, capable of reliably functioning over 20 years or more, with minimal user intervention for maintenance and repair, continues to be a hot topic.
Unlike their utility-scale counterparts of the multiple-MW class, small wind systems generally operate unsupervised. Moreover, in autonomous applications, the energy security of the user community critically depends on the availability of the wind turbine, so reliability, rather than energy production, becomes the individual most important design consideration, apart from the need for building turbines and systems with a low initial investment cost. Given that the regulation of power and rotor speed is a major design decision for wind turbines, affecting reliability and cost alike, it is worth considering some alternatives. Early commercial turbine designs, such as the ones deployed in California during the 1980s, generally relied on stall regulation, a scheme where the turbine rotor aerodynamics is designed in such a way that flow detachment is obtained at a critical wind speed, leading to a drastic reduction in rotor torque and, thereby, limiting both power and rotor speed. This scheme was largely improved in the designs of the then emergent Danish manufacturers, leading to a scheme generally called the Danish concept [
9]. This design choice survived in commercial designs well into the early 2000s, when large commercial wind turbines started to rely exclusively on pitch regulation, a scheme where the turbine blades are rotated around their long axes, either passively or actively, collectively or individually, in order to adjust the blade lift forces and thereby the rotor torque in a continuous way. Interestingly, there has recently been a renewed interest in stall regulation for multi-megawatt wind turbines, specifically designed for fatigue load mitigation; see [
10] for a recent approach.
Pitch regulation is now practically an industry standard in large-scale wind turbines, but is still a rather incipient technology in the small wind world, although passively operated pitch schemes, used, e.g., in the Jacobs wind turbines, have been around for about half a century. Stall regulation, on the other hand, though largely extinct at the utility scale, has made a relatively recent re-appearance in small wind turbines. While the Danish concept relied on a fixed rotor speed (dictated by the fixed electricity frequency of the utility grid to which the turbine was interconnected), modern small wind systems are not limited by this restriction, given the availability of low-cost power electronics devices capable of adjusting the generator torque in a continuous way, thereby allowing for a variety of design choices, including the possibility of obtaining a flat nominal power curve, such as in pitch-controlled systems.
Currently, many commercial small wind turbines operate with yet a different power/rotor speed regulation system called furling [
11], a robust scheme based on the interplay of aerodynamics forces and moments acting on the rotor, mounted somewhat eccentrically from the vertical rotation axis, and a tail vane. Furling has been demonstrated to allow for reliable designs withstanding two decades or more of operation; however, the trade-offs are considerable, including a sharp drop-off of the output power after the onset of furling, hysteresis between the operational curves for increasing and decreasing wind speeds, respectively, and a quite complex aerodynamic state during furling, particularly in a highly turbulent environment, typically encountered by small wind turbines. Furling will not be discussed in the current paper; the interested reader is referred to [
11,
12] for an introduction.
Independent of the regulation scheme selected, fatigue loading is always a major factor for wind turbine life, particularly the rotor blades. Fatigue loading arises as a combination of the stochastic nature of the wind field impinging on the rotor and rotational sampling [
13] caused by the finite spatial coherence of the wind field. Excessive fatigue loads lead to a reduction in the blade life and increase maintenance costs and financial losses [
14], making a careful design for fatigue an important part of the (small) wind turbine design process. Given that fatigue loading is a major concern in wind turbines, a large body of literature exists on the subject, with an emphasis on utility-scale turbines. While much of the knowledge on fatigue damage in wind turbine blades has been generated by testing, both of the composite materials commonly used [
15,
16] and of components and systems, design procedures based on a combination of simulations and standards are becoming more common. This is particularly important in the field of small wind turbines where extensive testing is not cost effective for manufacturers.
Ardila et al. [
17] used load cases for power production and parked turbines recommended in the IEC 61400-1 standard [
18] for the fatigue life assessment of a blade designed for a 5-MW wind turbine; their approach considers a combination of aeroelastic simulation tools such as FAST and HAWC2 for the generation of fatigue loading and fatigue assessment tools developed by the authors. As in most works, the Palmgren–Miner (PM) rule is used for cumulative damage calculation and the Goodman method for computing the allowed load cycle number, and the rainflow method is applied to determine the number of events with a given combination of mean stress and stress range. A similar approach was used by Hayata et al. [
19], who also studied the fatigue life of the blade of a 5-MW wind turbine. Kong et al. [
20], as part of an effort to design a 750-kW wind turbine in South Korea, developed a simplified fatigue design procedure, using empirical formulae for fatigue loading in combination with results from materials testing; Goodman diagrams obtained from laboratory testing and the PM rule were then used to calculate the expected fatigue life. The work in [
16] presented common methods for calculating damage on the blades. The most common method is the Palmgren–Miner (PM) rule [
21], in which, if the damage parameter,
D, reaches the value of one, the existence of damage is concluded. Currently, there are several other methods, which are variations of the PM rule, such as the Marco–Starkey rule [
22]. Currently, standardized methods for estimating the fatigue life of wind turbine rotors are available [
23], providing the designer with a simplified conceptual framework useful for practical design decisions. As discussed by Evans et al. [
24], the small wind turbine standard IEC-61400-2 [
23] contemplates three possible methods for fatigue life assessment, one based on operational measurements, another using aeroelastic simulations, and, finally, a simplified procedure to be used by designers and small wind turbine manufacturers without access to sophisticated aeroelastic modeling tools. Evans et al. found that the simplified procedure in their study case produced extremely conservative results, leading to blade designs that are likely not cost-effective. Given the need for small wind turbine systems to reduce their costs while maintaining a level of reliability, other approaches are needed.
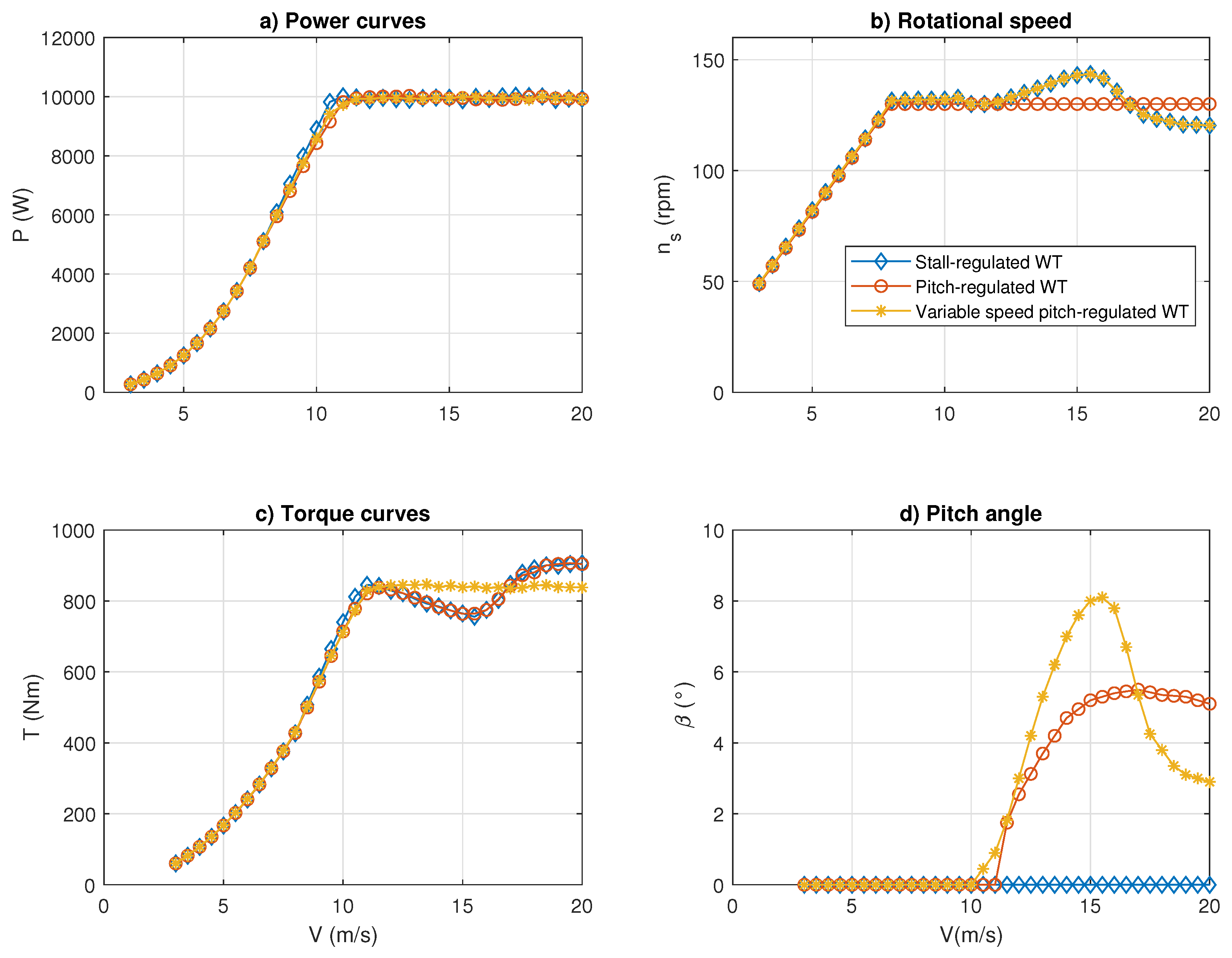
Derived from the observation above, the following two-fold objective of the present work was formulated: first, a practical simulation-based methodology for assessing fatigue life in small wind turbines, consistent with the recommendations of the standard IEC 61400-2, is proposed and demonstrated. This approach is believed to simplify the design process of small wind turbines greatly, allowing for a greater accuracy (as compared to the option of the simplified design method proposed in the standard) or a faster design process (as compared to conventional processes). Having introduced the methodology, a comparative study of the fatigue behavior of stall- and pitch-regulated small-scale wind turbines is carried out. The stall-regulated rotor was designed as part of the project P09 of the Mexican Center for Innovation in Wind Energy (CEMIE Eólico); the study of different power/rotor speed control schemes was part of the project P19 of the CEMIE Eólico. The design of the stall-regulated rotor resulted from an co-optimization of three objectives: (a) a high power coefficient at partial load (i.e., below nominal power), (b) overspeed control to guarantee structural stability up to 20 m/s without the need for additional braking systems, and (c) a high starting torque to overcome the generator cogging torque at low wind speeds. The third requisite somewhat restricted the power production at medium wind speeds, but enabled the rotor to work with a variety of generators. The detailed design considerations will be described elsewhere and are not part of the present work.
The comparative assessment of stall- and pitch-regulated small-scale wind turbines was partly motivated by the fact that the CEMIE Eólico considered both technologies. However, while investigating the subject, it became apparent that comparative assessments of the impact of power/rotor speed regulation on fatigue damage are very scarce. To the best knowledge of the authors, only Kennedy et al. [
25] addressed this issue, albeit in the context of tidal, not wind turbines. As opposed to [
25], in this work, all wind turbine designs studied have (almost) the same power curve, leading to an identical energy production for any given wind regime (at least under steady-state conditions) and allowing for a direct comparison of the analyzed schemes.
This paper is organized as follows: In
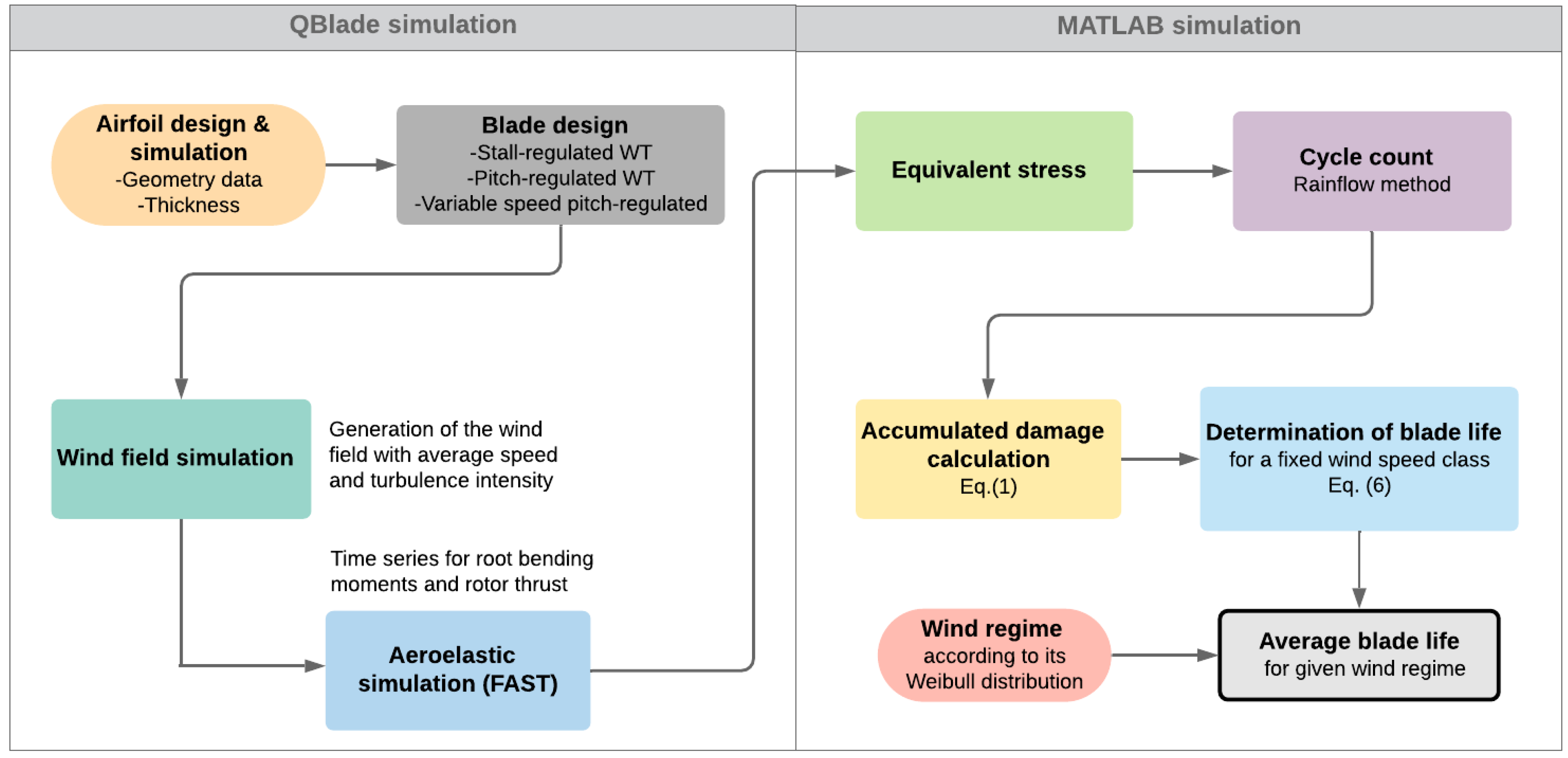
Section 2, the basic relations used to calculate the fatigue life of small wind turbine blades according to the simplified methodology in standard IEC 61400-2 are briefly reviewed, followed by an overview of the complete methodology, including the different design and simulation tools available in the public-domain suite QBlade [
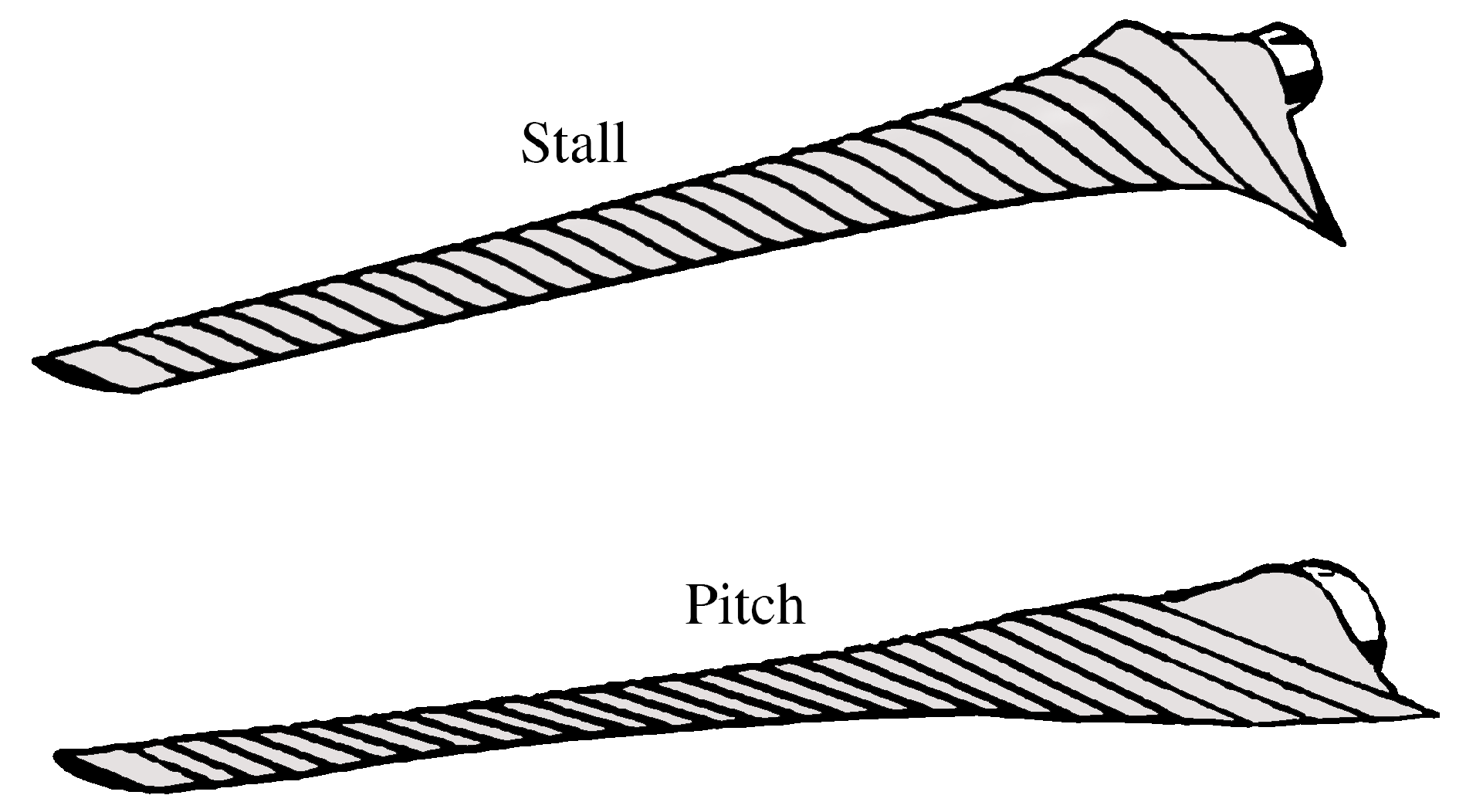
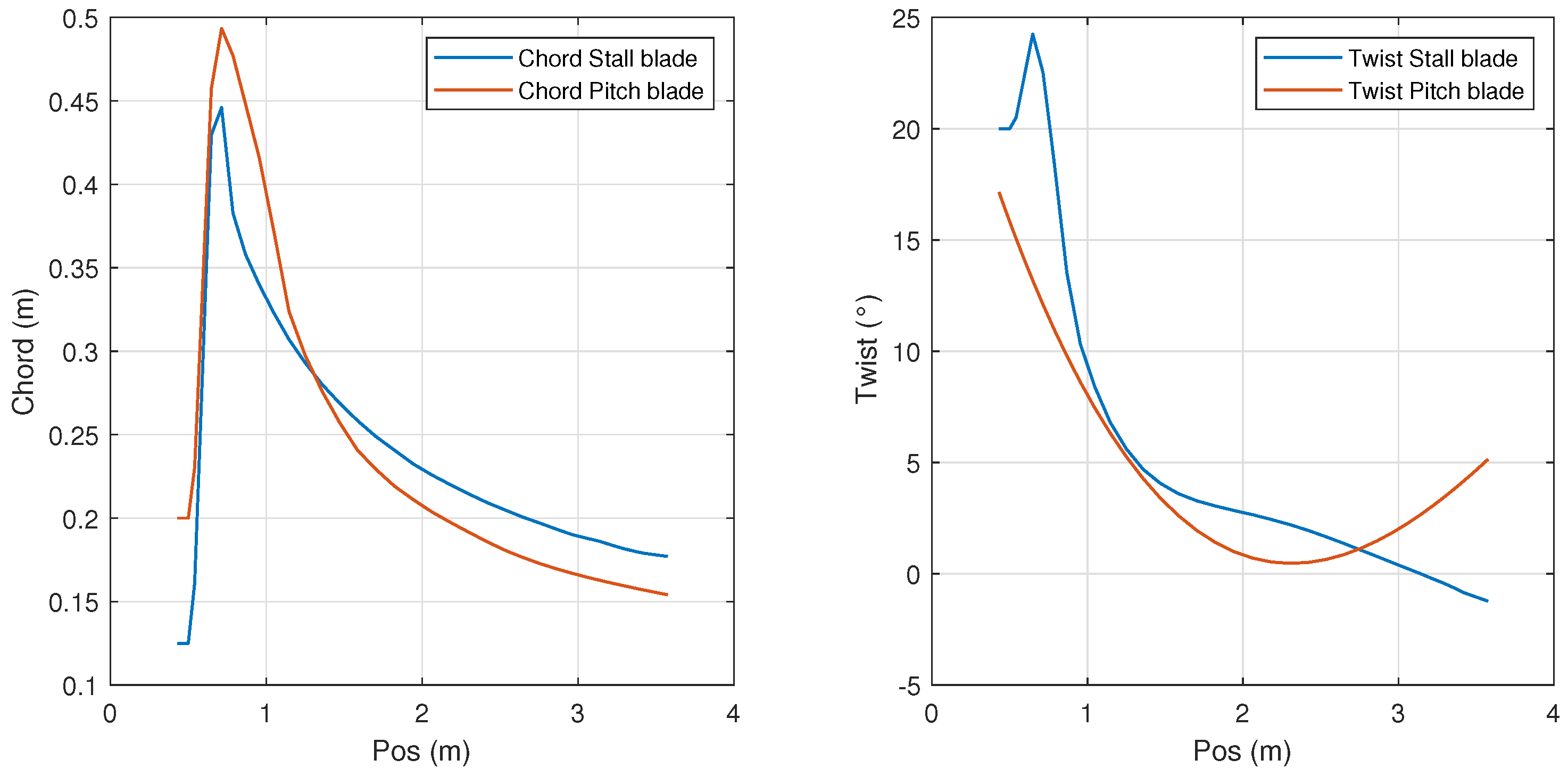
26]. A general description of the blade geometry and materials, as well as the design curves for power, rotor speed, and pitch angle is also provided for the case of the stall-regulated wind turbine and two pitch-regulated alternatives. The full information about the outer geometry of both blades is provided in the
Appendix A. A brief description about the setup of the wind field generator and the dynamic simulation, using FAST, is also included. The results obtained with the methodology proposed in this work are presented and discussed in some detail in
Section 3. The summary and conclusions are presented in
Section 4.
3. Results and Discussion
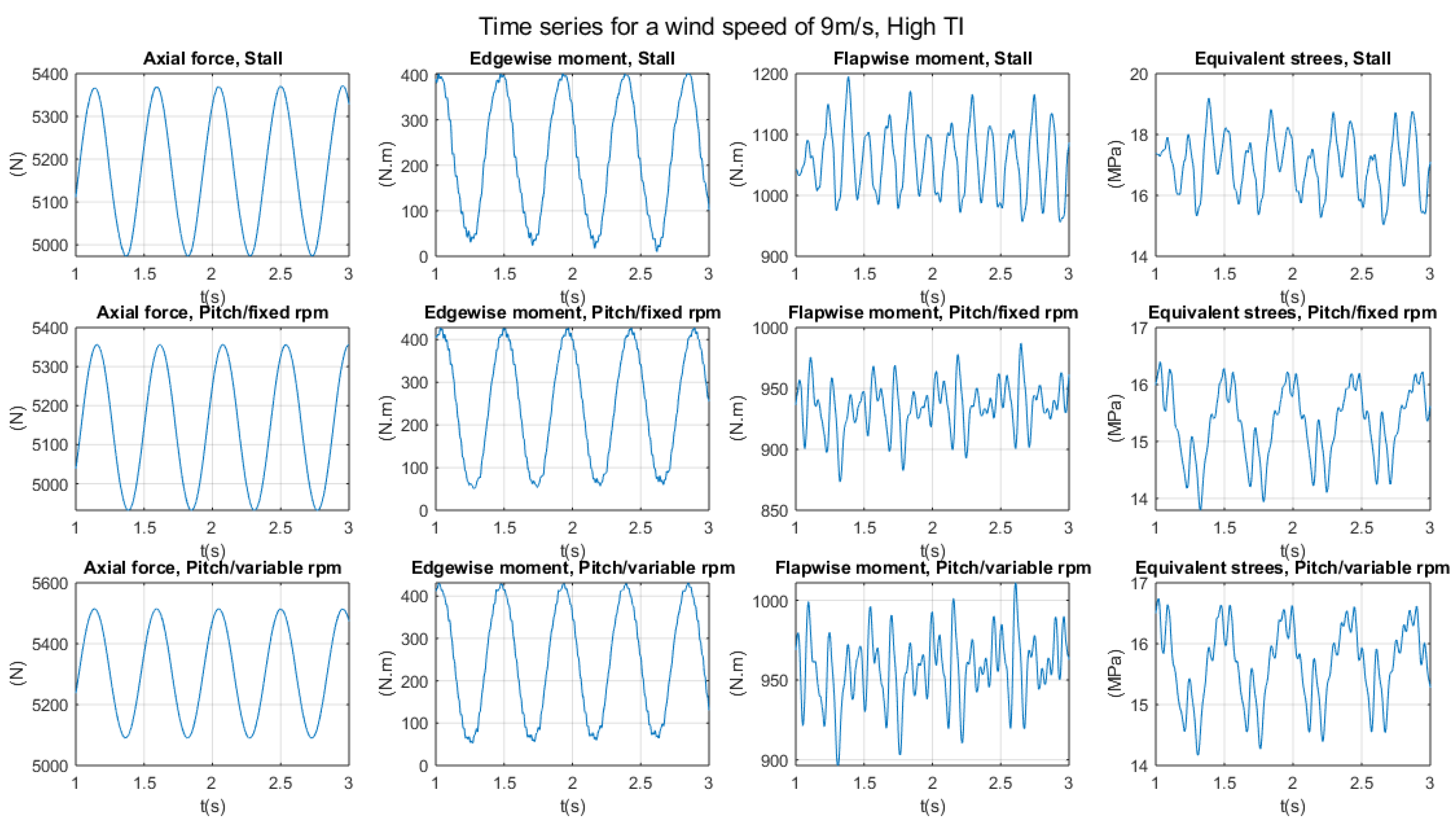
We will start the Results Section by first inspecting some of the time series outputs produced directly by the aeroelastic simulation.
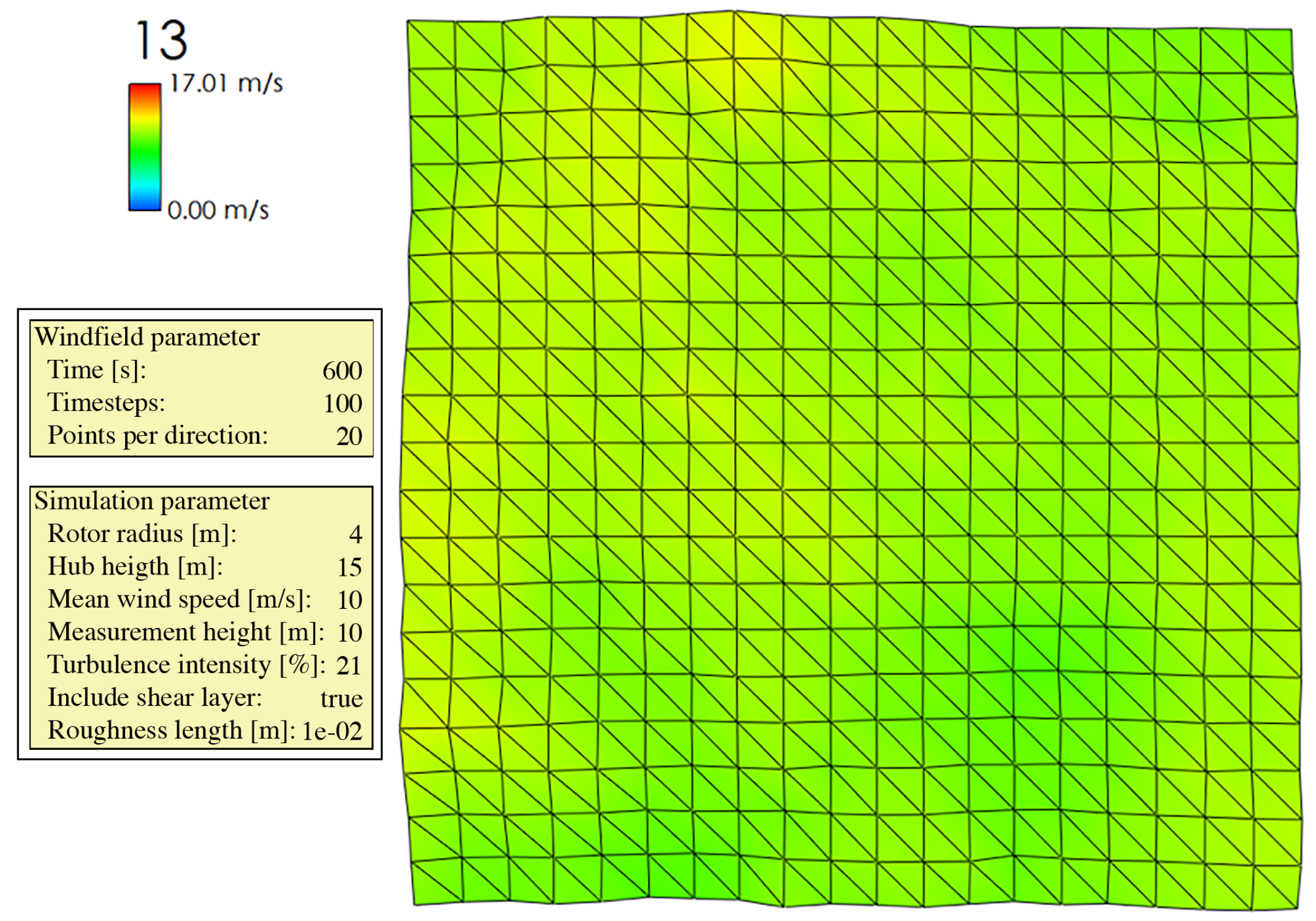
Figure 7 shows a short stretch of the time series results obtained for the case of an average wind speed of 9 m/s and a high turbulence intensity. It can be seen that the axial force (rotor thrust) and the in-plane (“edgewise”) bending moment showed an almost perfectly sinusoidal signal with a period of a little under half a second. By comparison to the power curve, it can be seen that this frequency was consistent with the rotor speed of 130 rpm, expected by design for a wind speed of 9 m/s. The amplitude of the rotor thrust oscillation was only about 5% of the average thrust, which is consistent with the fact that the rotor thrust always created a force in the downward direction, with a minor periodic variation, arising from the fact that the wind speed was higher at the top than at the bottom position. The amplitude of the edgewise oscillations, on the other hand, was almost 100% of the average value. This fact can be qualitatively understood by the observation that at the upper position, the blade sees the highest wind speed (and, consequently, also the highest in-plane force component), at the blade tip where the leverage is the highest, and conversely, the lowest wind speed (and therefore the smallest force) near the root where the leverage is the smallest. At the lower position, on the other hand, the point with the lowest wind speed has the highest leverage whereas the point with the smallest leverage has the highest wind speed. Evidently, this leads to a small in-plane bending moment at the bottom position of the blade and a high bending moment at the top. In any case, no significant difference was observed among the three regulation schemes. Note that the terrain roughness length used in the generation of the stochastic wind field was
= 0.01 m, corresponding to a power law exponent of 0.136.
The situation at the out-of-plane or flapwise bending moment, as well as the resulting effective stress, is quite different. Not only were the average values higher for the stall-regulated wind turbine, but also could the presence of strong harmonics be detected, with a much stronger presence of harmonics in the case of stall regulation as compared to both pitch-regulation schemes, which had a nearly identical behavior between them, not unexpectedly, given the very similar regulation characteristics at 9 m/s.
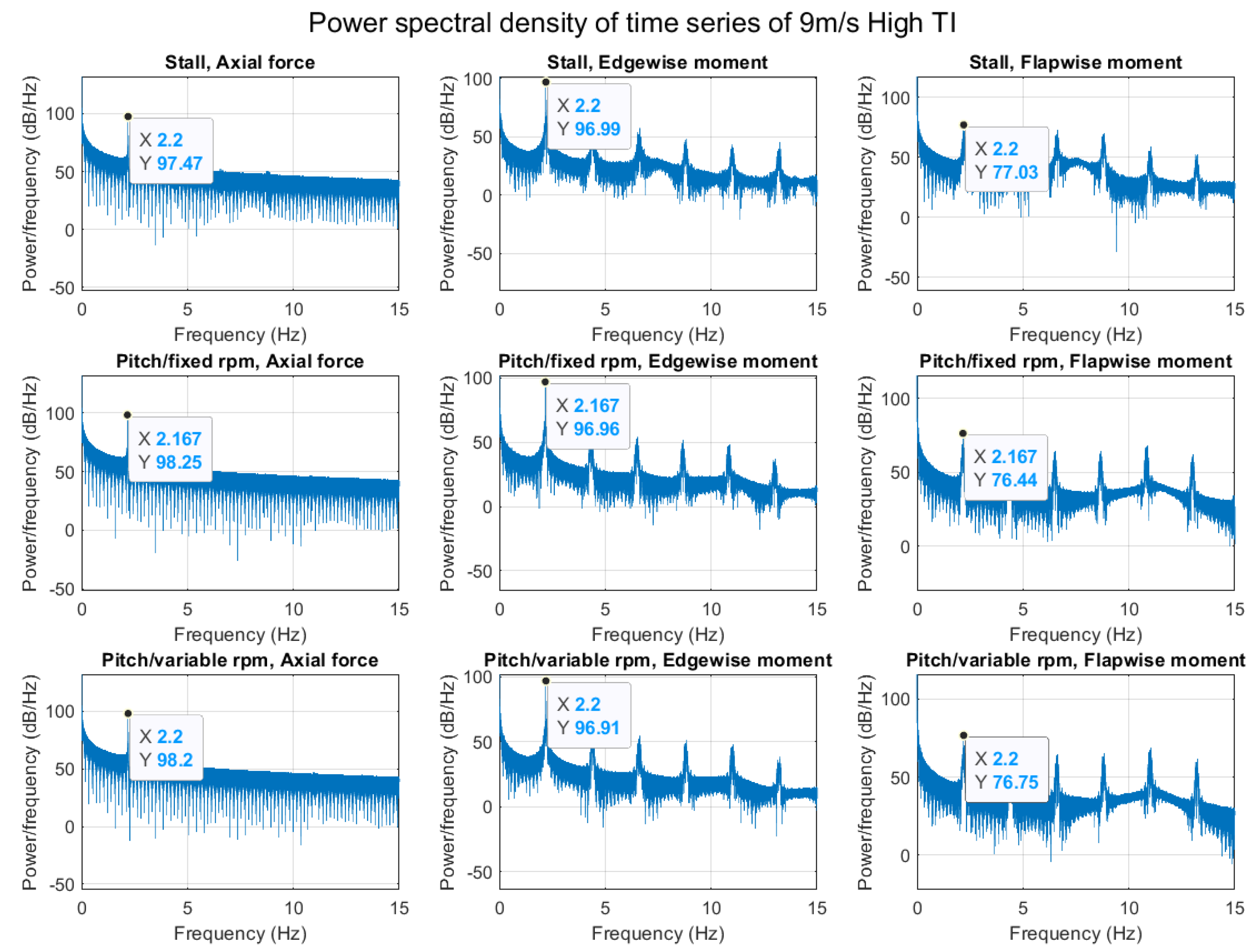
After receiving some initial insights from inspecting the time series, it is interesting to study the power spectra. In
Figure 8, the primary outputs of the FAST simulation (thrust and bending moments) are shown for all three regulation schemes, again for the case of a 9-m/s wind speed. In the case of the axial force signal, one prominent peak at the primary rotor frequency can be observed, consistent with the almost perfectly sinusoidal signal shown in
Figure 7. The situation at the bending moments, however, was quite different, as evidenced by the rich harmonic sequence in both sets of spectra. Whereas the periodicity of the rotor thrust signal can be plausibly interpreted as a result of the different wind speeds at the top and bottom positions of the blade, the periodicity of the bending moments can likely be attributed, at least in part, to the rotational sampling effect described above, which is expected to display a comb of harmonics. Regarding a possible distinction between the three regulation schemes, it can be noted that not only the stall regulation showed again the highest peak at the fundamental rotor frequency, but also was the first harmonics was stronger than those in the signals obtained from pitch regulation. Interestingly, the fourth harmonics seemed to be stronger in the pitch-regulated signal, but its overall contribution was small.
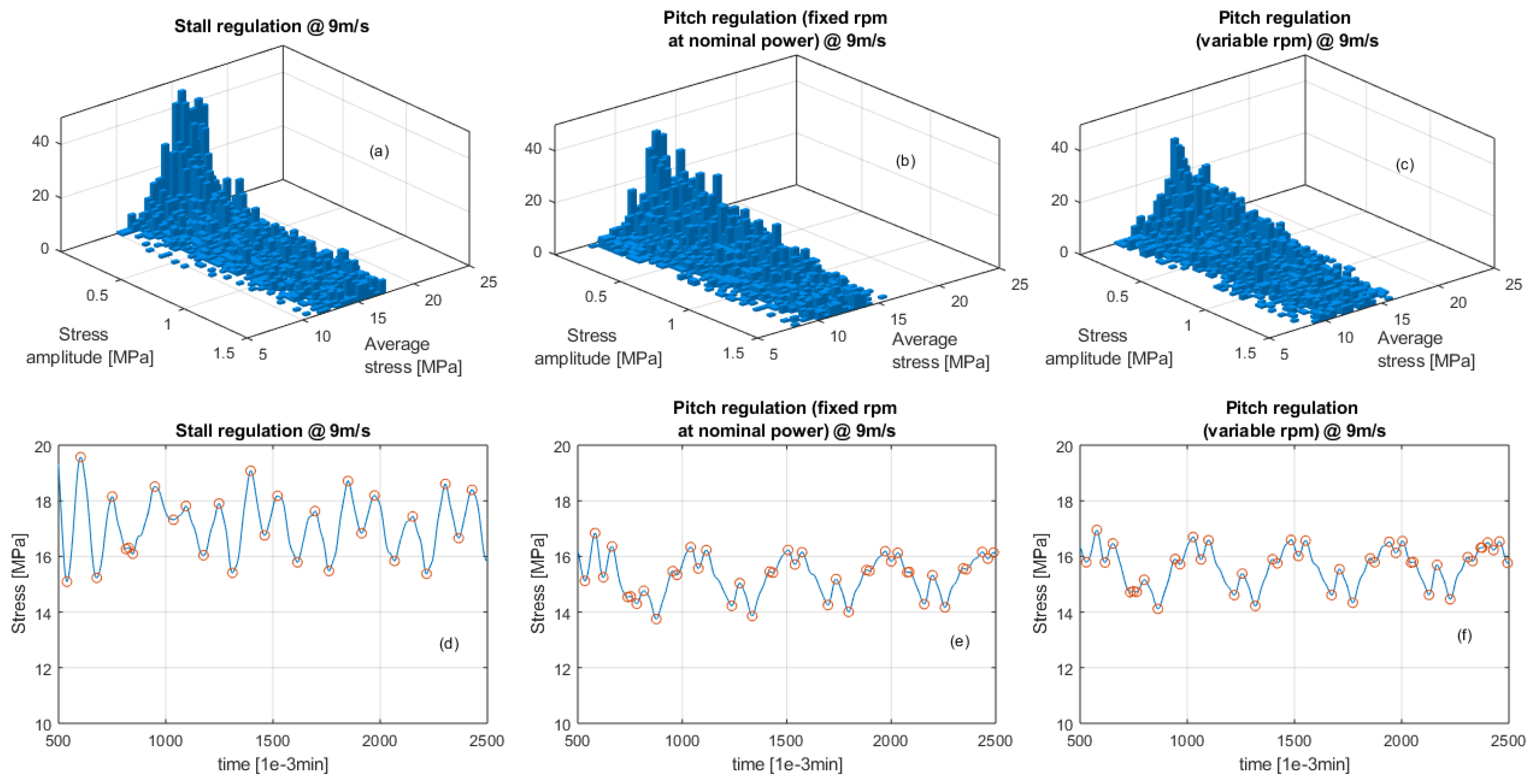
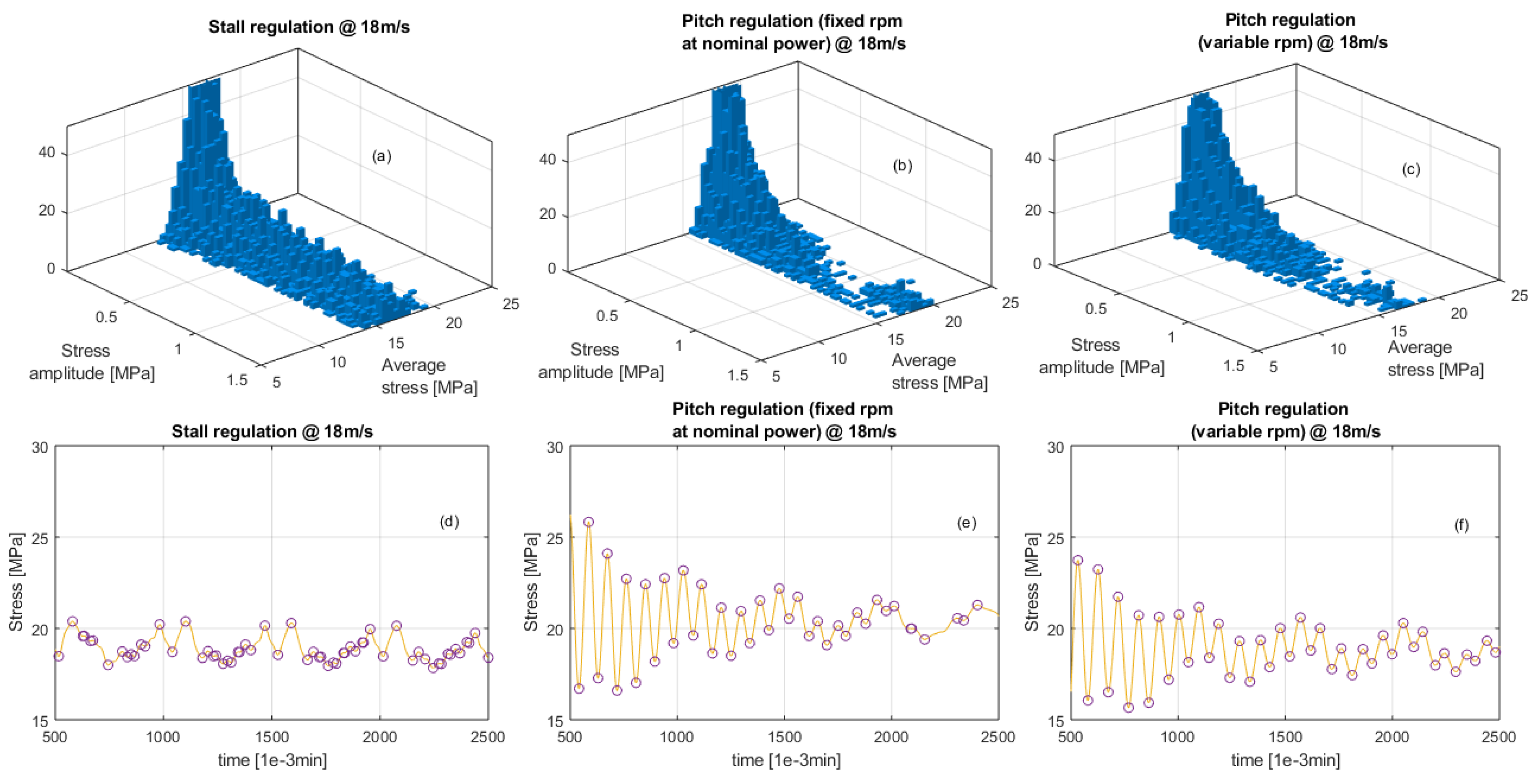
Having collected these initial insights, some of the results of the rainflow analysis will now be inspected. In
Figure 9, the results obtained with the rainflow counting analysis of the stress time series obtained with each of the regulation schemes are shown (upper row), as well as short segments of the corresponding time series. Additionally, the inflection points as identified by the rainflow algorithm are marked for clarity. Prior to generating these diagrams, the stress time series were subjected to some moving-average filtering in order to eliminate the large number of very small-amplitude cycles, which do not contribute to fatigue damage, but obscure the direct comparison between the bivariate histograms.
As shown in
Figure 9, the higher load level in the stall-regulation scheme, with vanishing differences between the two pitch-regulated schemes, become apparent. Not only is the average stress level higher (as evidenced by both the bivariate histogram and the time series segment), but also are the stress cycles deeper. The situation changed quite drastically when a higher average wind speed, specifically 18 m/s, was considered. As shown in
Figure 10, at this wind speed, the stall-regulated signal now showed a significantly smaller average stress and also a smaller depth of the stress cycles. As opposed to the 9-m/s case, the two pitch regulation schemes now showed some differentiation, with the variable rpm pitch variant exhibiting a lower average stress, very similar to the one experienced by the stall regulated turbine, albeit with a higher alternating component.
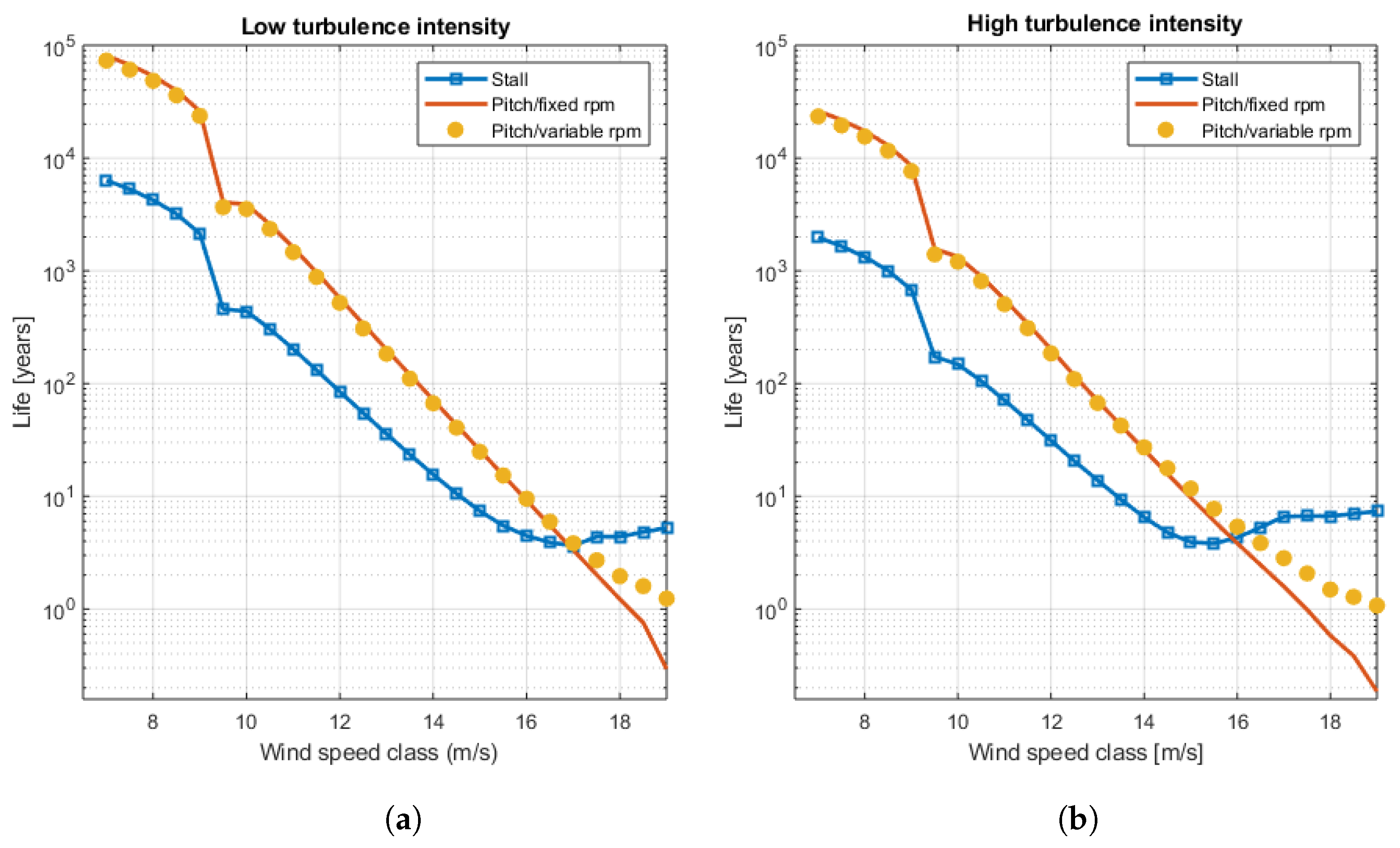
After these preparations, a fatigue life diagram can now be constructed as a function of the wind speed class.
Figure 11 shows such a diagram for low (
Figure 11a) and high levels of the turbulence intensity (
Figure 11b). A number of things can be observed: first of all, and not unexpectedly, fatigue life decayed rapidly with wind speed; note the logarithmic scale of the figure. For each increase in wind speed by about 2 m/s, a reduction in fatigue life by one order of magnitude was observed, so evidently higher wind speeds put a higher strain on the rotor. Secondly, higher turbulence intensity generally led to higher fatigue damage, also an expected finding. This effect was also substantial: the higher turbulence cases showed a fatigue life about half an order of magnitude smaller than their low-turbulence counterparts, except for very high wind speeds (16 m/s and higher). This is clear evidence of the fact that the stress cycle amplitude (rather than the average stress) is the main driver behind fatigue degradation, at least for most of the wind speeds encountered in a normal wind climate.
Thirdly, and most importantly in the context of the present study, the type of power/rotor speed regulation makes a difference, and a great one. For medium wind speeds (7 m/s–10 m/s), the stall-regulated turbine experiences a fatigue damage about an order of magnitude larger than the pitch-regulated wind turbines. This differentiation was, again, expected since stall-regulated wind turbines experience a far more turbulent environment in their regulation regime, as compared to pitch-controlled turbines where flow remains attached most of the time. In the present case, the difference between the design operating conditions in the wind speed range between 8 m/s and 10 m/s was actually relatively small between the stall- and pitch-regulated turbines, since the pitch designs used in this work shared a “soft stall” with the stall turbine in that wind speed range, so the difference in fatigue life observed in
Figure 11 was larger than one would expect. A plausible explanation for this is the use of the stall model used in the aeroelastic simulations; as mentioned above, reliable simulations without instabilities require the use of the Leishman–Beddoes dynamic stall model in the FAST program, whereas the pitch-regulated wind turbines were always simulated assuming steady flow conditions, even in the regime between 8 m/s and 10 m/s, where “soft stall” conditions could arise.
The difference in fatigue life between the stall- and the pitch-regulated turbines became gradually smaller with wind speed and even inverted its sign at very high wind speeds. This cross-over occurred at 17 m/s for the low turbulence intensity cases and at 16 m/s for high TI. Similarly, the fatigue life curve for the pitch-regulated turbine with variable rotor speeds started to separate from the fixed-rpm curve, after being almost indistinguishable for all lower wind speeds. This joint behavior of both the stall and the variable-rpm pitch turbine clearly pointed to a common rotor speed-related root cause. The fact that this departure from the general trend of the fatigue life curves occurred for smaller wind speed classes in the case of high turbulence is readily attributed to the fact that the filter mask for the moving-average calculation used to get to
Figure 11 had a larger spread to neighboring wind speed classes in this case, leading to an effectively larger averaging window. Therefore, the effect of the rpm reduction occurring in the stall- and variable-rpm pitch turbines manifested itself at lower wind speeds. Other than that, the underlying effect appears to be the same. The most likely candidate for an explanation was the axial force or rotor thrust. At high wind speeds, the average thrust diminishes again in the case of the stall and variable-rpm pitch regulation, below the average thrust value of the fixed-rpm pitch-regulated wind turbine (not shown for brevity). This mechanism is likely to explain the observed behavior at very high wind speeds.
Now, after the differences in fatigue life between the three regulation schemes and their underlying root causes have been discussed with some detail, it is convenient to close the discussion with some considerations regarding the practical implications of the regulation schemes introduced in this work. A simple way of doing this is by convoluting the damage function
with a Weibull distribution function characteristic of a given wind regime, as described above, and then applying Equation (
4) in order to obtain the corresponding (average) fatigue life. As mentioned before, the primary damage function was assumed to be zero for wind speed averages lower than 7 m/s, meaning
; additionally, only wind speed classes up to 20 m/s were considered; for higher values, the turbines were assumed to be parked, and fatigue damage accumulated during parked conditions was assumed to be negligible; therefore,
. Damage resulting from extreme events cannot, of course, be ruled out, but this is outside the scope of the current study.
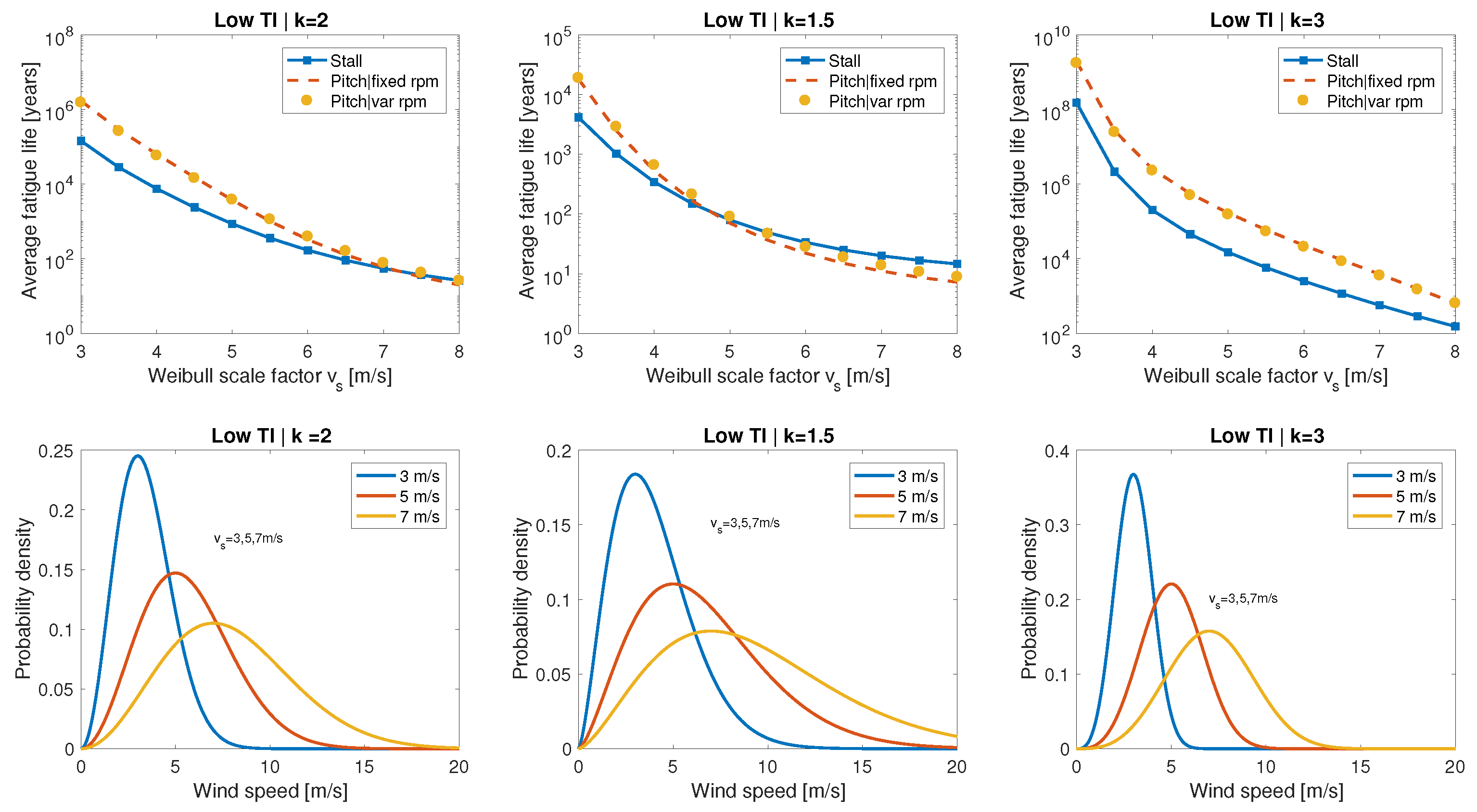
In
Figure 12, the results for the average fatigue life are shown for the cases of low TI levels. The upper rows show the fatigue as a function of the Weibull scale factor
, whereas the lower row has the corresponding Weibull probability density functions for selected
values (3 m/s, 5 m/s, and 7 m/s). The columns are organized according to their Weibull shape factor (
). In the standard case of
(also referred to as a Rayleigh distribution), the normal ordering was largely conserved, with the stall-regulated turbine showing the lowest average fatigue life up to Weibull scale factors of about 7 m/s. Given that most small wind turbines operated at sites within this wind speed range, it is safe to say that normally stall regulation will lead to lower fatigue life. The differentiation was somewhat exacerbated in the case of
, where the average fatigue life of stall turbines remained consistently about an order of magnitude below that of their pitch-regulated counterparts. This stronger differentiation can be attributed to the narrower distributions obtained in the case of
. Conversely, sites with a low shape factor, as illustrated by the
case, showed wider distributions, leading to a cross-over between the stall and pitch fatigue life curves, at Weibull shape factors as low as about 4.5 m/s. The situation at high TI levels was analogous to the one at low TI; therefore, the corresponding graphs were omitted for brevity.


 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











