Design and Development of an Active Suspension System Using Pneumatic-Muscle Actuator and Intelligent Control



Abstract
Featured Application
Abstract
1. Introduction
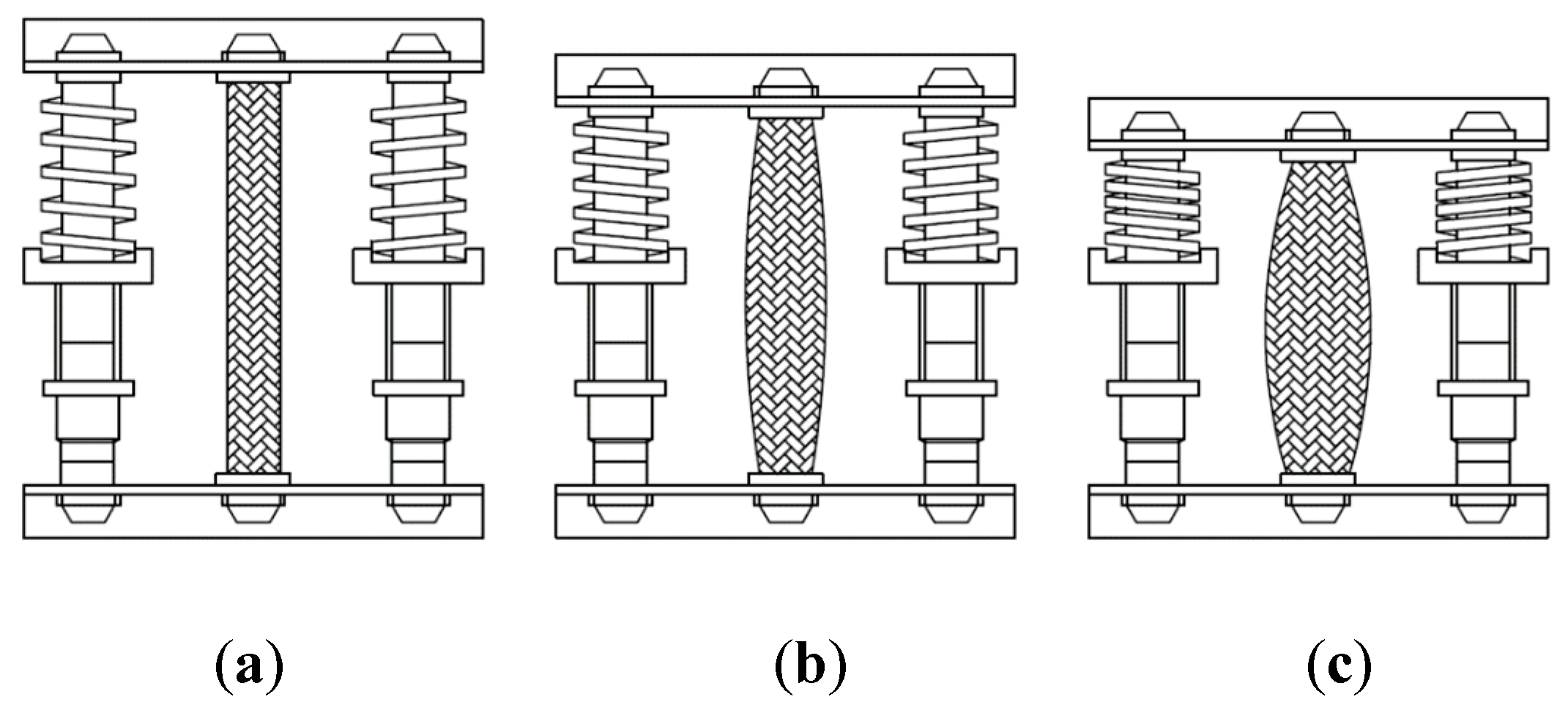
- This paper uses a pneumatic muscle actuator with two MacPherson struts to increase the isolation of vibration and show its feasibility on a quarter-car test rig.
- A fully-functional test-rig for a quarter car is developed for examining the PM-ASS which has a road profile generator to provide real road conditions.
- Using the orthogonal activation basis functions of Fourier series, Fourier-NN has a clear physical meaning and readily determined structure, which gives it an advantage over conventional NNs. Because of the orthogonality of the basis functions, the Fourier-NN converges very fast, which means it is suited to real-time implementation.
- A state-predictor is used to predict the output error and to provide the predictions for the controller.
- Four different control strategies are conducted to analyze the stability and accuracy in terms of reducing vibration, which are MacPherson Strut, FSASMC, FSB-ASMC+ , and GP-FSB-ASMC+ .
2. Description of the Mathematical Model
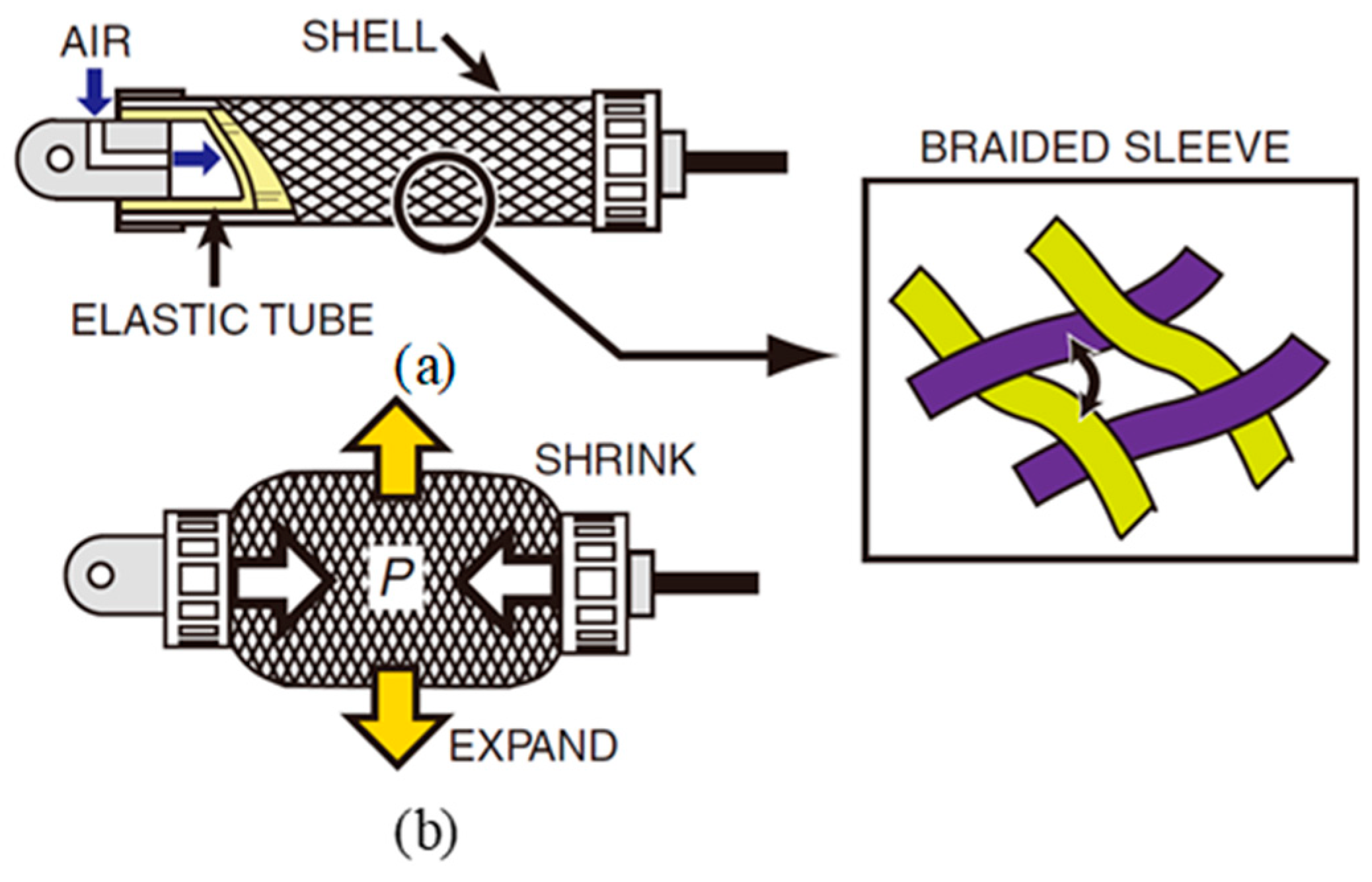
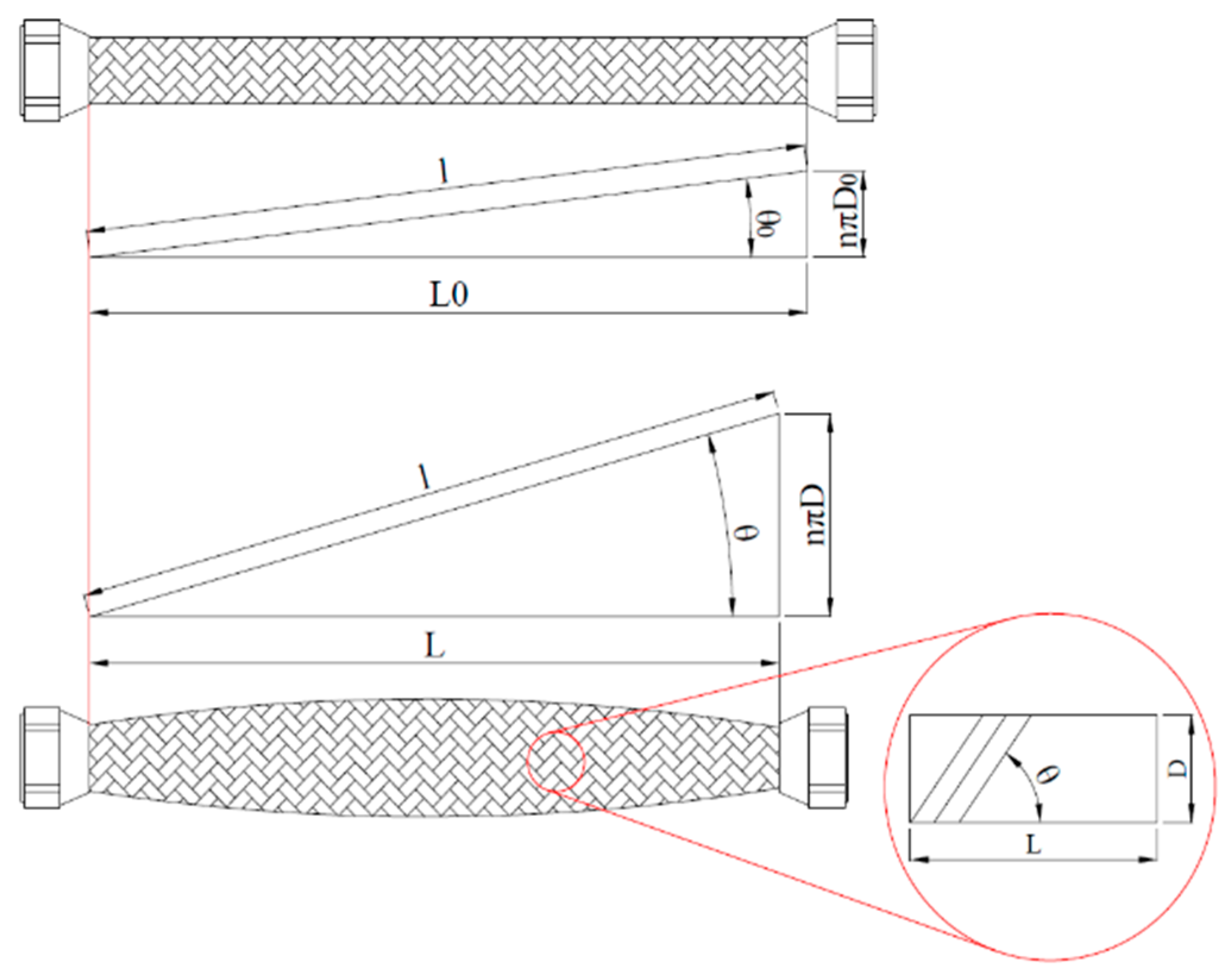
2.1. Mathematical Model of the PM
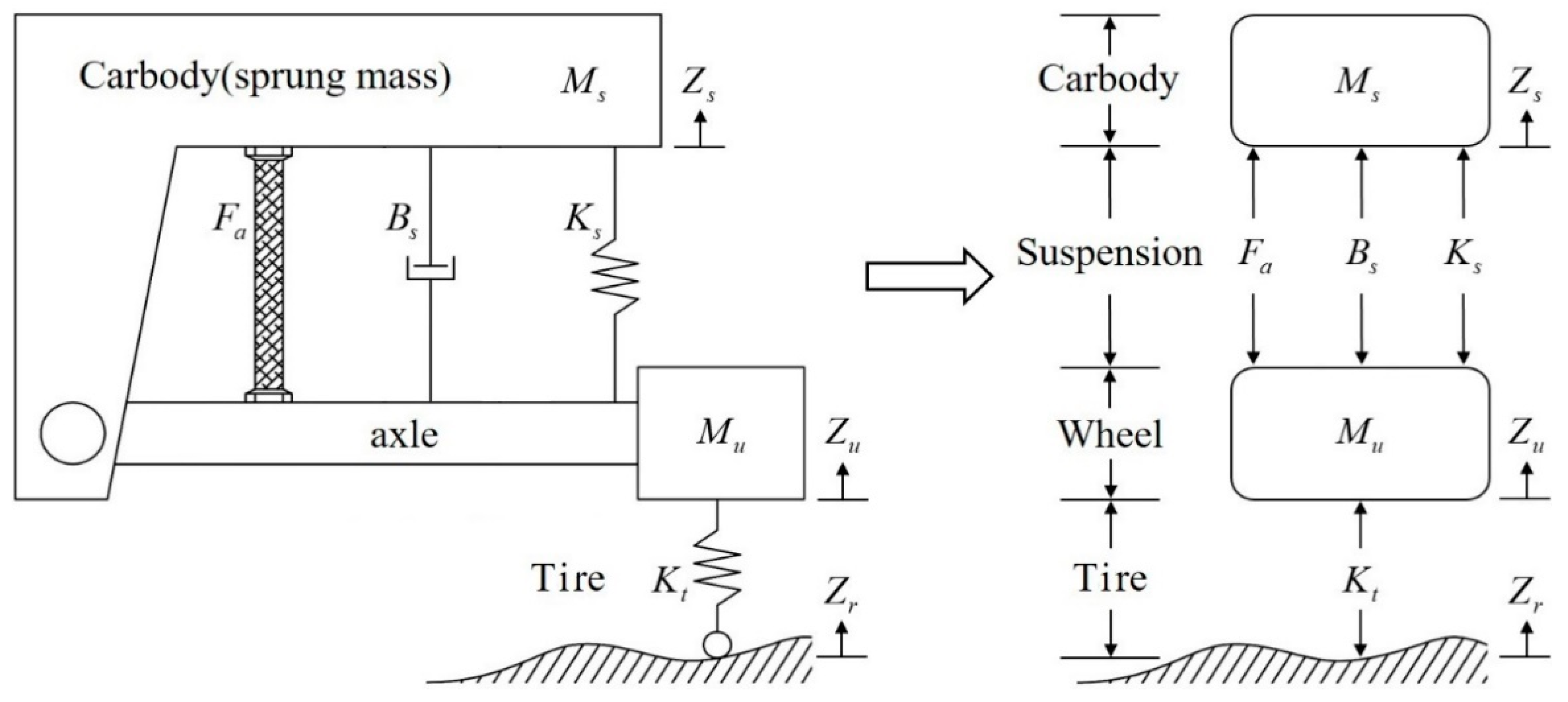
2.2. Mathematical Model of a Quarter Car
3. Adaptive Fourier Neural Network Sliding-Mode Controller (FSB-ASMC) with Tracking Performance
3.1. Sliding Mode Control
3.2. Description of Fourier Neural Networks
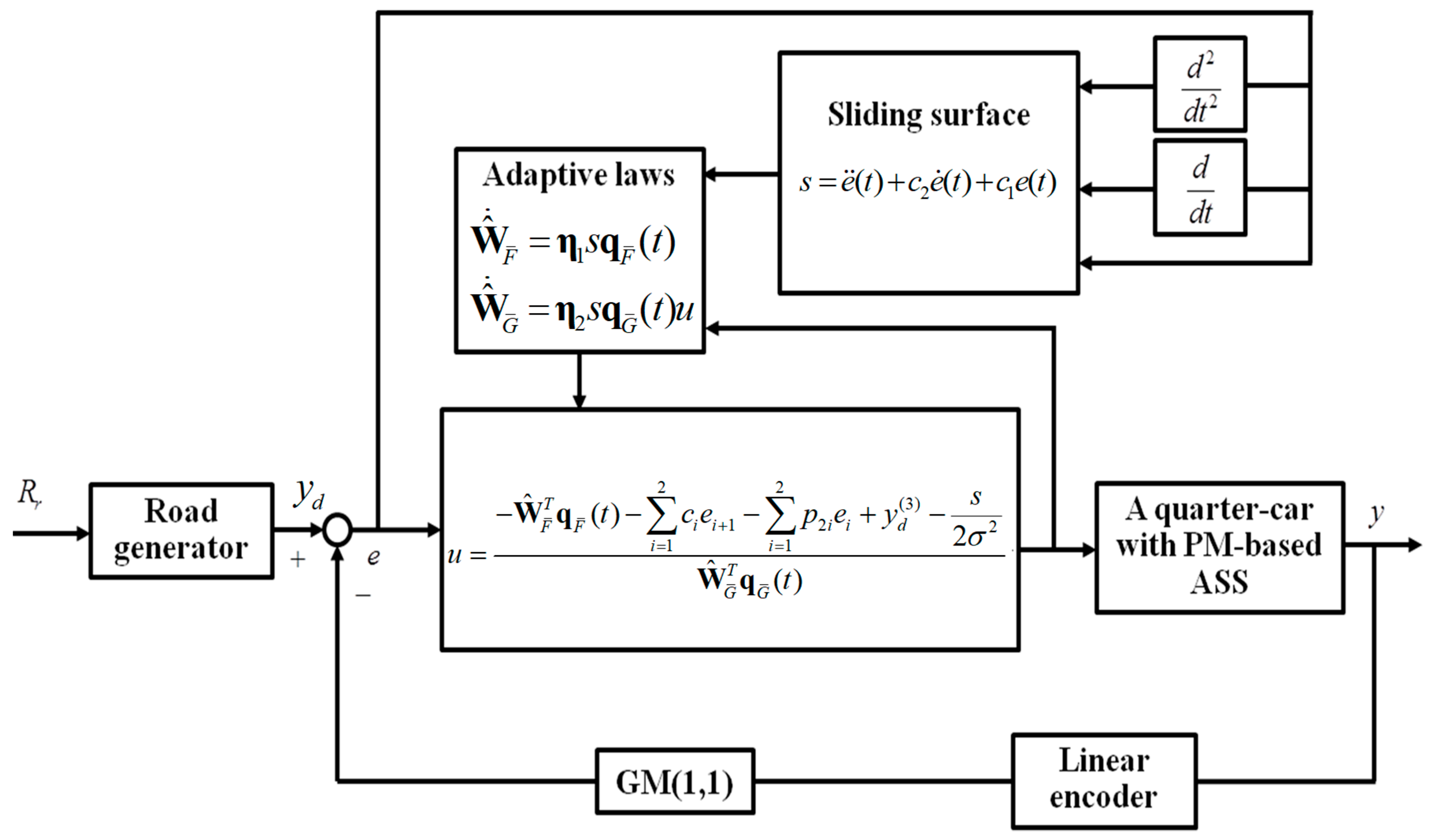
3.3. Design of the FSB-ASMC with Tracking Performance
3.4. Design Procedures
4. Experiments
- (1)
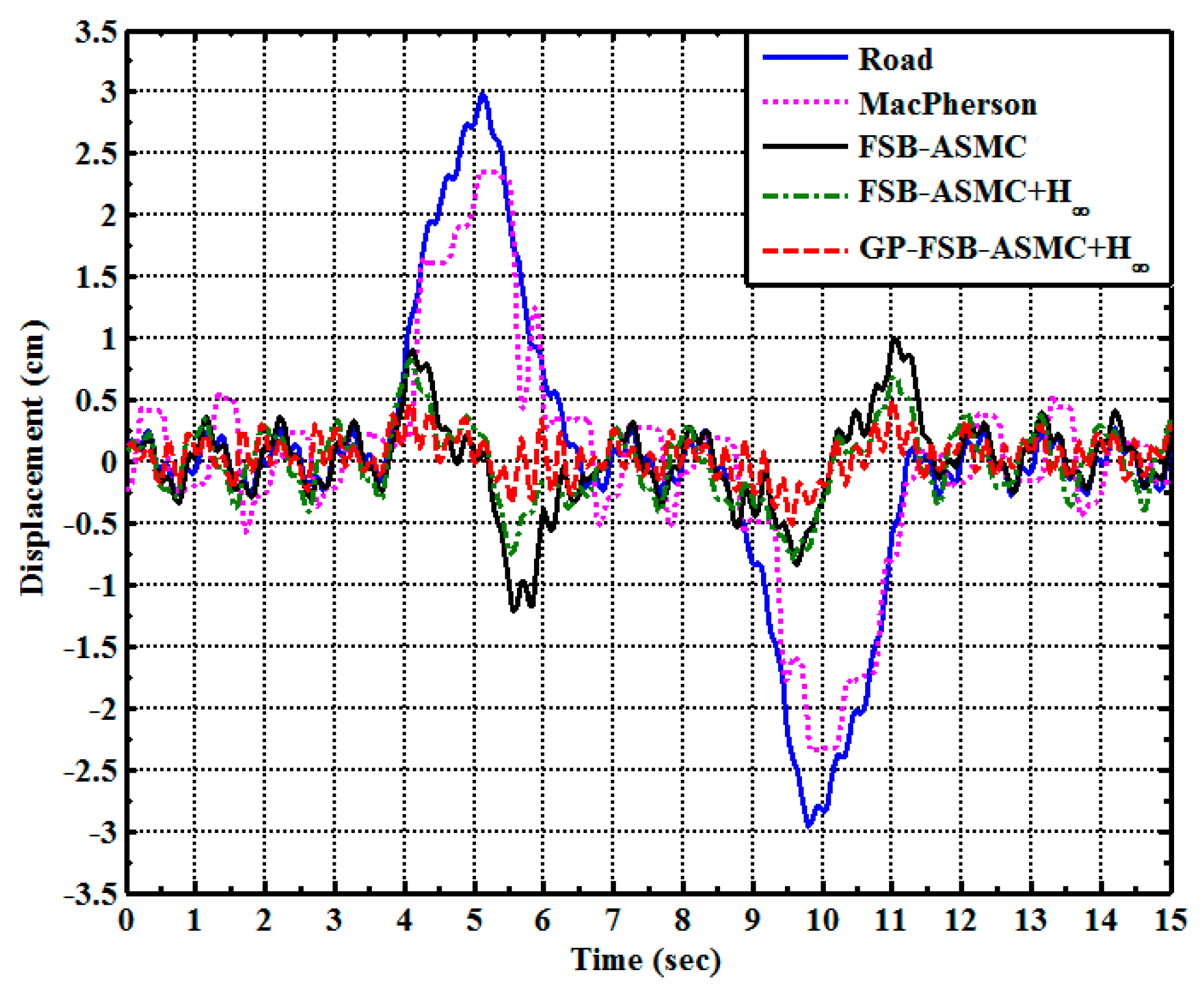
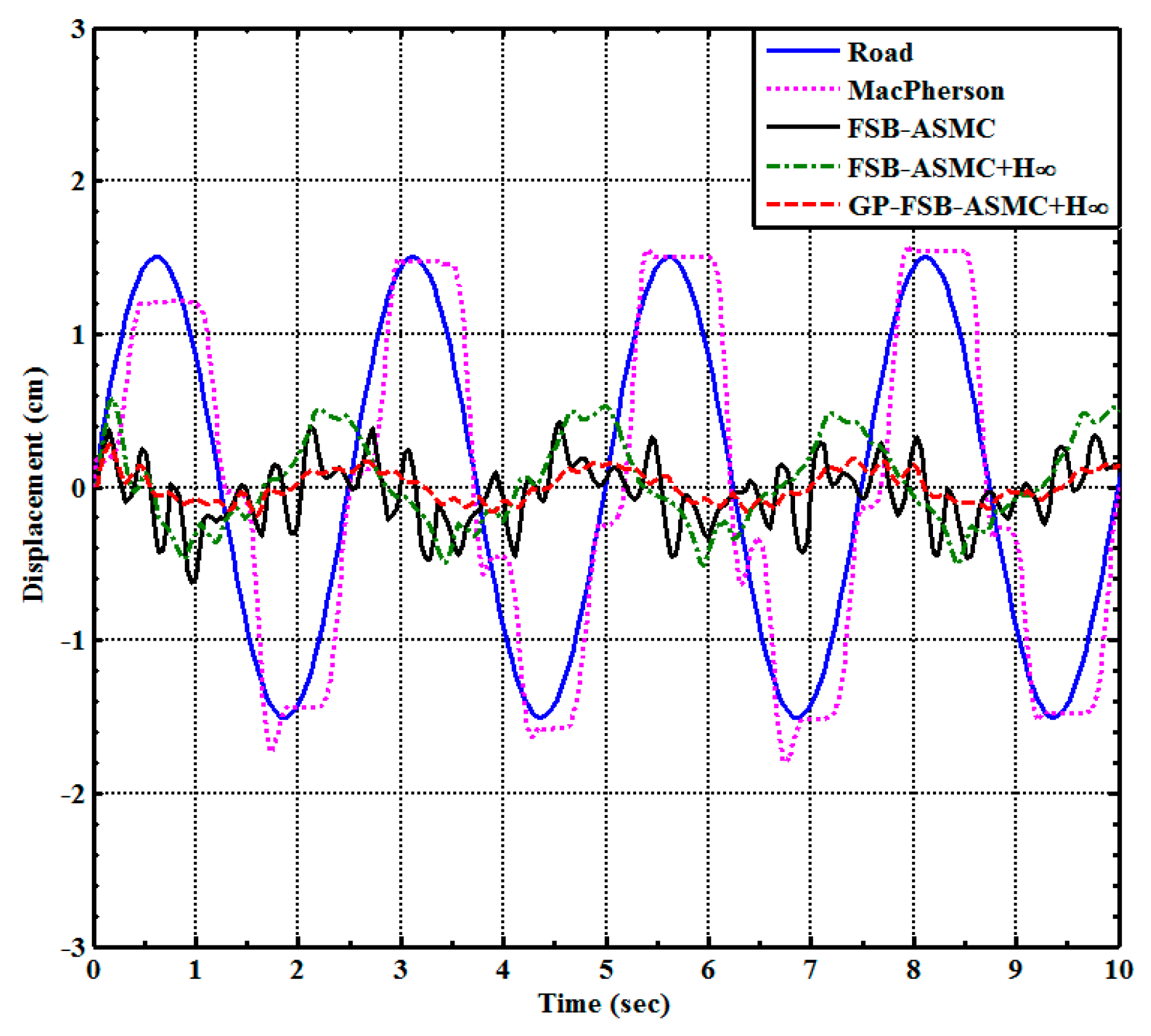
- It was shown that the techniques for the performance guarantee and the state-predictor significantly improved the PM-ASS in terms of attenuating the displacement of the sprung mass and decreasing the acceleration of the sprung mass.
- (2)
- The performance of the Macpherson struts and the FSB-ASMC with/without the performance guarantee and the state-predictor was compared.
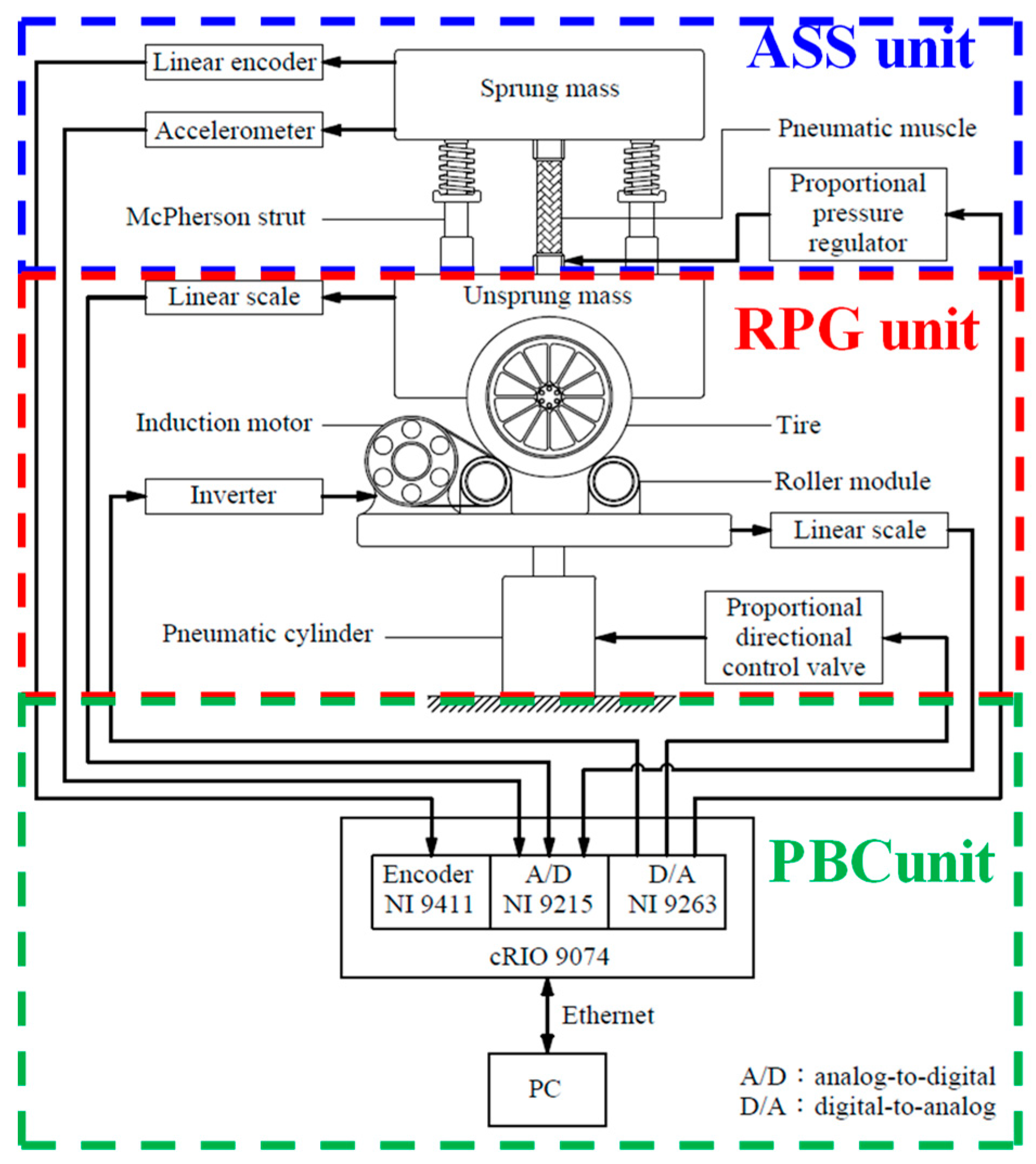
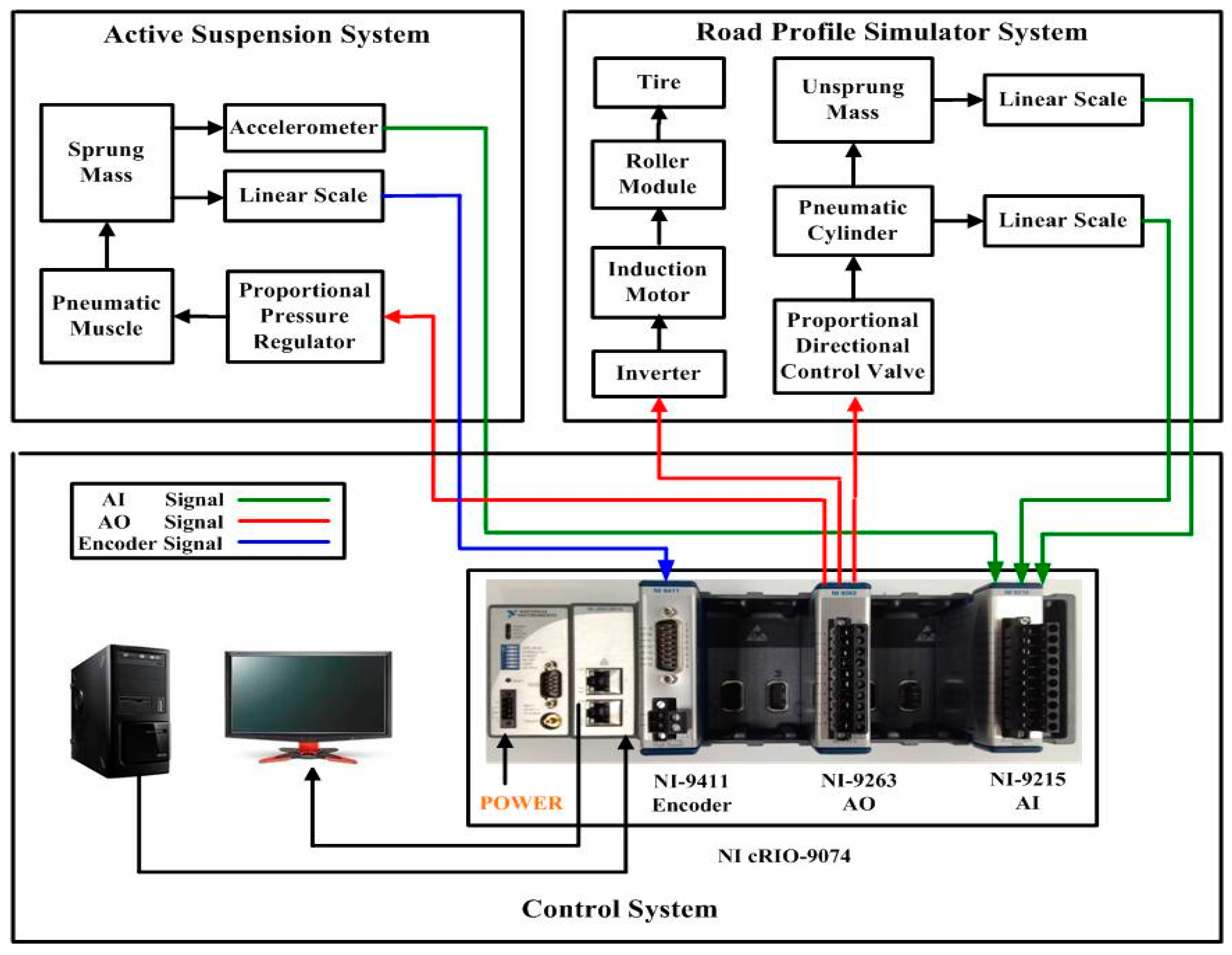
4.1. Test-rig for the PM-ASS
- (1)
- The sprung mass is the portion of the vehicle’s total mass that is supported by the suspension, i.e., a chassis.
- (2)
- The unsprung mass represents the brake, the caliper and ancillaries. The un-sprung mass does not include the mass of the wheel.
- (3)
- Two MacPherson struts and one PM are used for the PM-ASS.
- (4)
- A proportional pressure regulator (PPR) regulates the flow of air (pressure) into the PM.
- (5)
- An inverter drives the induction motor to rotate the tire. The maximum speed of the tire is at 35 km/hr.
- (6)
- A pneumatic cylinder generates various road conditions. The proportional directional control valve regulates the flow of air into the pneumatic cylinder. The pneumatic cylinder can lift a load of more than 400 kg and generates road profiles that are more than 10 cm high with a frequency of 10 Hz.
- (7)
- On the plane of the support frame, one linear encoder and one accelerometer measures the displacement and the acceleration of the sprung mass.
- (8)
- Two linear scalars measure the vertical variation in the unsprung mass and the road profile.
- (9)
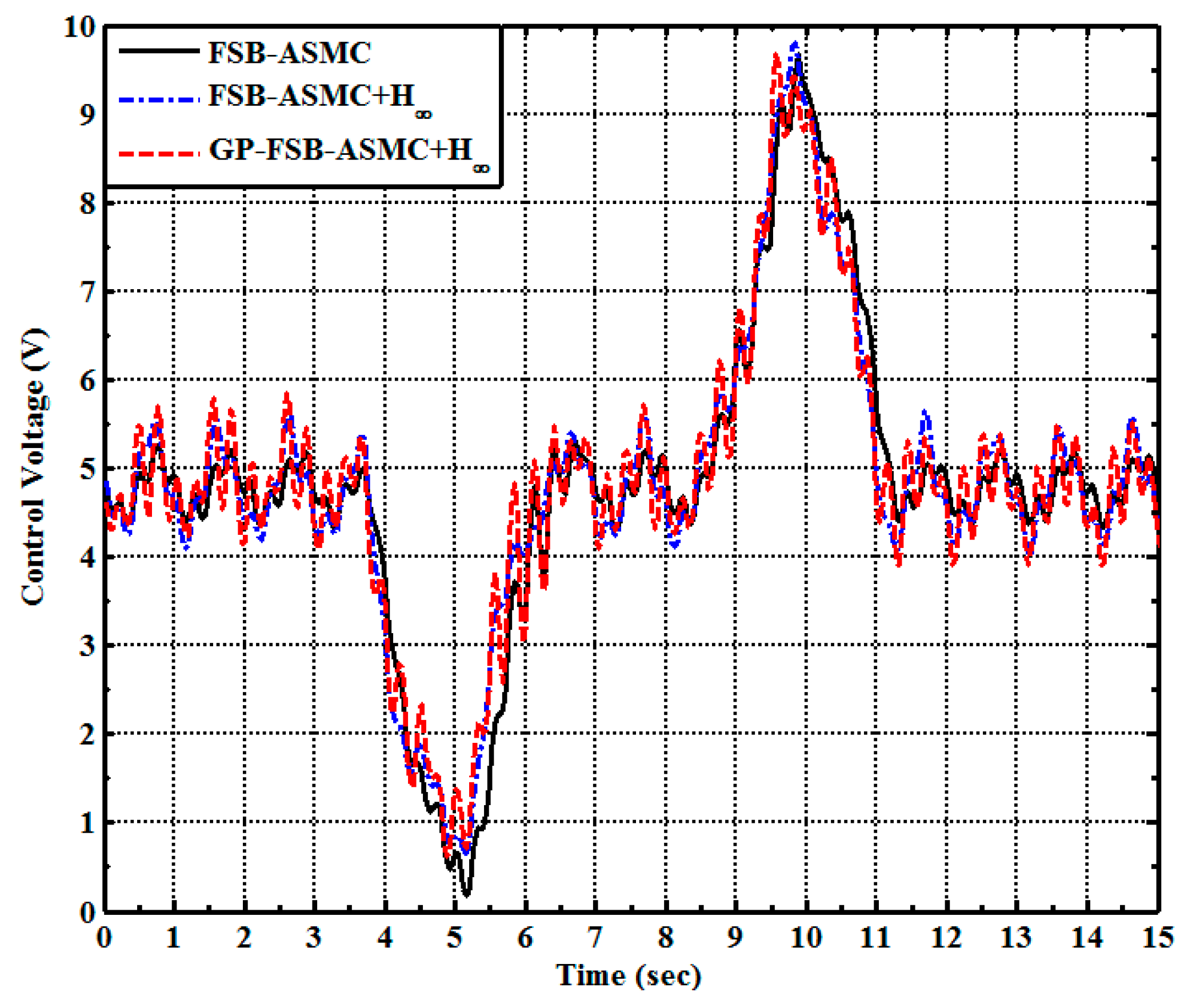
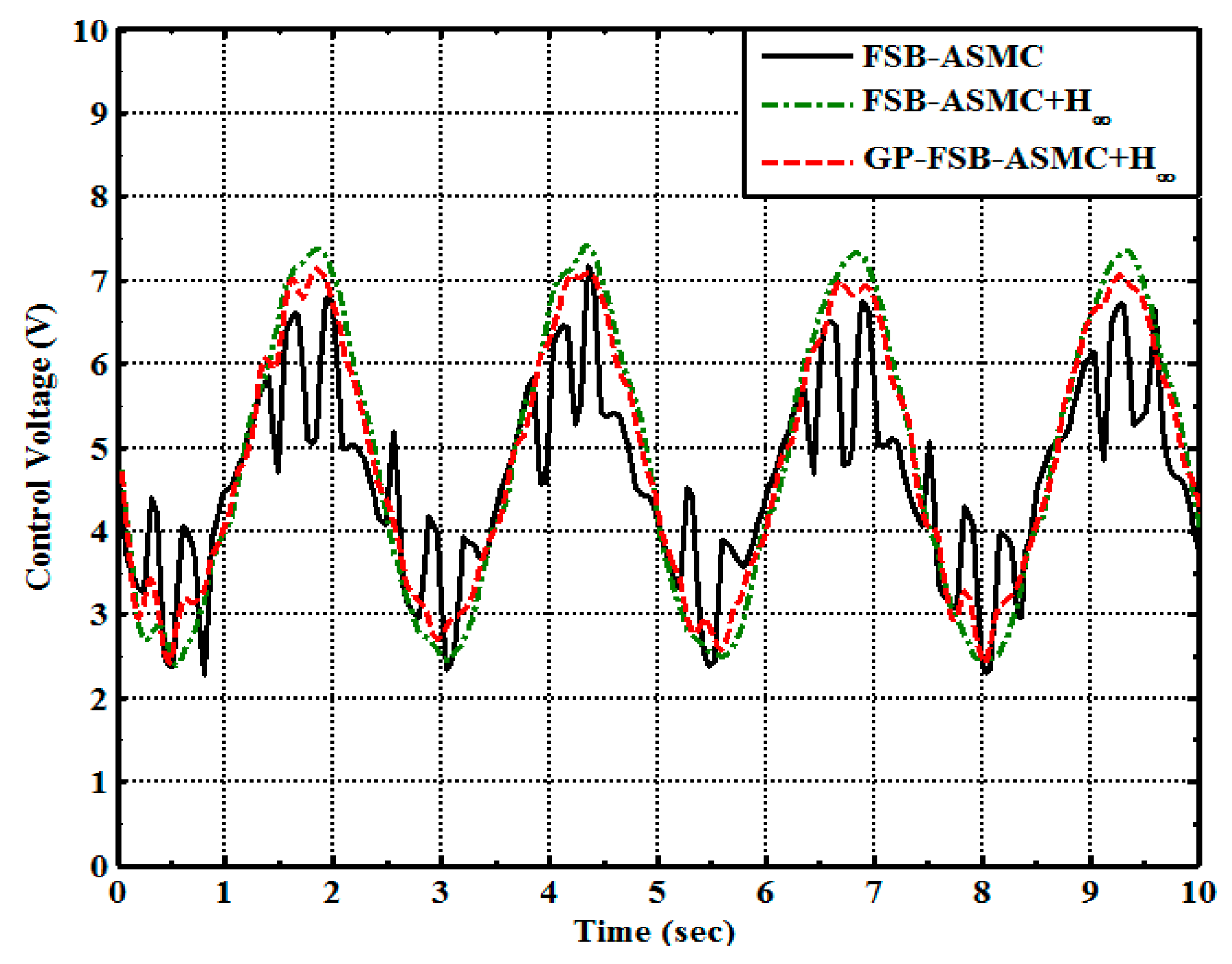
- The control is bounded within .
4.2. Initial Setups for Experiments
4.3. Results and Disscussion of Experiments
5. Conclusions
6. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Gohrle, C.; Schindler, A.; Wagner, A.; Sawodny, O. Design and vehicle implementation of preview active suspension controllers. IEEE Trans. Control Syst. Technol. 2014, 22, 1135–1142. [Google Scholar] [CrossRef]
- Cao, D.; Song, X.; Ahmadian, M. Editors’ perspectives: road vehicle suspension design, dynamics, and control. Veh. Syst. Dyn. 2011, 49, 3–28. [Google Scholar] [CrossRef]
- Liu, X.; Pang, H.; Shang, Y. An Observer-Based Active Fault Tolerant Controller for Vehicle Suspension System. Appl. Sci. 2018, 8, 2568. [Google Scholar] [CrossRef]
- Song, B.K.; An, J.H.; Choi, S.B. A New Fuzzy Sliding Mode Controller with a Disturbance Estimator for Robust Vibration Control of a Semi-Active Vehicle Suspension System. Appl. Sci. 2017, 7, 1053. [Google Scholar] [CrossRef]
- Patil, S.A.; Joshi, S.G. Experimental analysis of 2 DOF quartercar passive and hydraulic active suspension systems for ride comfort. Syst. Sci. Contr. Eng. Open Access J. 2014, 2, 621–631. [Google Scholar] [CrossRef][Green Version]
- Van der Sande, T.P.J.; Gysen, B.L.J.; Besselink, I.J.M.; Paulides, J.J.H.; Lomonova, E.A.; Nijmeijer, H. Robust control of an electromagnetic active suspension system: Simulations and measurements. Mechatronics 2013, 23, 204–216. [Google Scholar] [CrossRef]
- Huang, S.J.; Chen, H.Y. Adaptive sliding controller with self-tuning fuzzy compensation for vehicle suspension control. Mechatronics 2006, 16, 607–622. [Google Scholar] [CrossRef]
- Lin, J.; Lian, R.J.; Huang, C.N.; Sie, W.T. Enhanced fuzzy sliding mode controller for active suspension systems. Mechatronics 2009, 19, 1178–1190. [Google Scholar] [CrossRef]
- Yu, M.; Evangelou, S.A.; Dini, D.; Cleaver, G.D. Parallel Active Link Suspension: A Quarter-Car Experimental Study. IEEE/ASME Trans. Mechatron. 2018, 23, 2066–2077. [Google Scholar] [CrossRef]
- Evangelou, S.A.; Kneip, C.; Dini, D.; De Meerschman, O.; Palas, C.; Tocatlian, A. Variable-Geometry Suspension Apparatus and Vehicle Comprising Such Apparatus. U.S. Patent 9,026,309, 26 July 2011. [Google Scholar]
- Yu, M.; Arana, C.; Evangelou, S.A.; Dini, D. Quarter-car experimental study for series active variable geometry suspension. IEEE Trans. Control Syst. Technol. 2017, 27, 743–759. [Google Scholar] [CrossRef]
- Anakwa, W.K.N.; Thomas, D.R.; Jones, S.C.; Bush, J.; Green, D.; Anglin, G.W.; Rio, R.; Sheng, J.; Garrett, S.; Chen, L. Development and Control of a Prototype Pneumatic Active Suspension System. IEEE Trans. Educ. 2002, 45, 43–49. [Google Scholar] [CrossRef]
- Nieto, A.J.; Morales, A.L.; Gonzalez, A.; Chicharro, J.M.; Pintado, P. An analytical model of pneumatic suspensions based on an experimental characterization. J. Sound Vib. 2008, 313, 290–307. [Google Scholar] [CrossRef]
- Alireza, K. Improving Control Mechanism of an Active Air-Suspension System. Master’s Thesis, Eastern Mediterranean University, Gazimagusa, Cyprus, 2013. [Google Scholar]
- Graf, G.; Kieneke, R.; Maas, J. Pneumatic push-pull actuator for an active suspension. In Proceedings of the 5th IFAC Symposium on Mechatronic Systems, Cambridge, MA, USA, 13–15 Stepember 2010. [Google Scholar]
- Caldwell, D.G.; Medrano-Cerda, G.A.; Goodwin, M. Control of pneumatic muscle actuators. IEEE Control Syst. Mag. 1995, 15, 40–48. [Google Scholar]
- Kang, R.; Guo, Y.; Chen, L. Design of a Pneumatic Muscle Based Continuum Robot with Embedded Tendons. IEEE/ASME Trans. Mechatron. 2017, 22, 751–761. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Xie, S.Q.; Hussain, S.; Hussain, S.; Parsons, J.G. An Adaptive Wearable Parallel Robot for the Treatment of Ankle Injuries. IEEE/ASME Trans. Mechatron. 2014, 19, 64–75. [Google Scholar] [CrossRef]
- Ostasevicius, V.; Sapragonas, J.; Rutka, A.; Staliulionis, D. Investigation of Active Car Suspension with Pneumatic Muscle; 2002-01-2206; SAE Technical Paper: Warrendale, PA, USA, 2002. [Google Scholar]
- Zuo, W.; Cai, L. Adaptive-Fourier-Neural-Network-Based Control for a Class of Uncertain Nonlinear Systems. IEEE Trans. Neural Netw. 2008, 19, 1689–1701. [Google Scholar] [CrossRef] [PubMed]
- Zuo, W.; Zhu, Y.; Cai, L. Fourier-Neural-Network-Based Learning Control for a Class of Uncertain Nonlinear Systems With Flexible Components. IEEE Trans. Neural Netw. 2009, 20, 139–151. [Google Scholar] [CrossRef] [PubMed]
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. 2000, 20, 15–38. [Google Scholar]
- Daerden, F.; Lefeber, D.; Kool, P. Using Free Radial Expansion Pneumatic Artificial Muscles to control a 1DOF robot arm. In Proceedings of the First International Symposium on Climbing and Walking Robots, Brussels, Belgium, 26–28 October 1998; pp. 209–214. [Google Scholar]
- Lin, C.T.; George, C.S. Neural Fuzzy Systems: A Neuro-fuzzy Synergism to Intelligent Systems; Prentice Hall PTR: Lebanon, IN, USA, 1996. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Weights | Control Parameters |
|---|---|
| Performances | Maximum of Displacement (cm) | Acceleration (cm/s2) | |
|---|---|---|---|
| Control Strategies | |||
| MacPherson | 1.909 | 1.165 | |
| FSB-ASMC | 1.006 | 0.397 | |
| FSB-ASMC+ | 0.838 | 0.224 | |
| GP-FSB-ASMC+ | 0.593 | 0.112 | |
| Trained Weights |
|---|
| Performances | Maximum of Displacement (cm) | Acceleration (cm/s2) | |
|---|---|---|---|
| Control Strategies | |||
| MacPherson | 1.571 | 1.604 | |
| FSB-ASMC | 1.06 | 0.546 | |
| FSB-ASMC+ | 0.581 | 0.187 | |
| GP-FSB-ASMC+ | 0.285 | 0.119 | |
| Trained Weights |
|---|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, I.-H.; Lee, L.-W. Design and Development of an Active Suspension System Using Pneumatic-Muscle Actuator and Intelligent Control. Appl. Sci. 2019, 9, 4453. https://doi.org/10.3390/app9204453
Li I-H, Lee L-W. Design and Development of an Active Suspension System Using Pneumatic-Muscle Actuator and Intelligent Control. Applied Sciences. 2019; 9(20):4453. https://doi.org/10.3390/app9204453
Chicago/Turabian StyleLi, I-Hsum, and Lian-Wang Lee. 2019. "Design and Development of an Active Suspension System Using Pneumatic-Muscle Actuator and Intelligent Control" Applied Sciences 9, no. 20: 4453. https://doi.org/10.3390/app9204453
APA StyleLi, I.-H., & Lee, L.-W. (2019). Design and Development of an Active Suspension System Using Pneumatic-Muscle Actuator and Intelligent Control. Applied Sciences, 9(20), 4453. https://doi.org/10.3390/app9204453