Research on Virtual Inductive Control Strategy for Direct Current Microgrid with Constant Power Loads


Abstract
1. Introduction
- (1)
- Through the modeling of micro-sources and loads, the system can realize the conversion from a multi-dimensional to a low-dimensional system.
- (2)
- An innovative solution of system instability is proposed from the perspective of line inductance. Compared with the virtual capacitance strategy in [18], the method proposed in this paper will be more smooth and fast in the process of adjustment.
- (3)
- The other salient feature of this paper is that starting from the transmission line, the strategy can be applied to a wide range of situations.
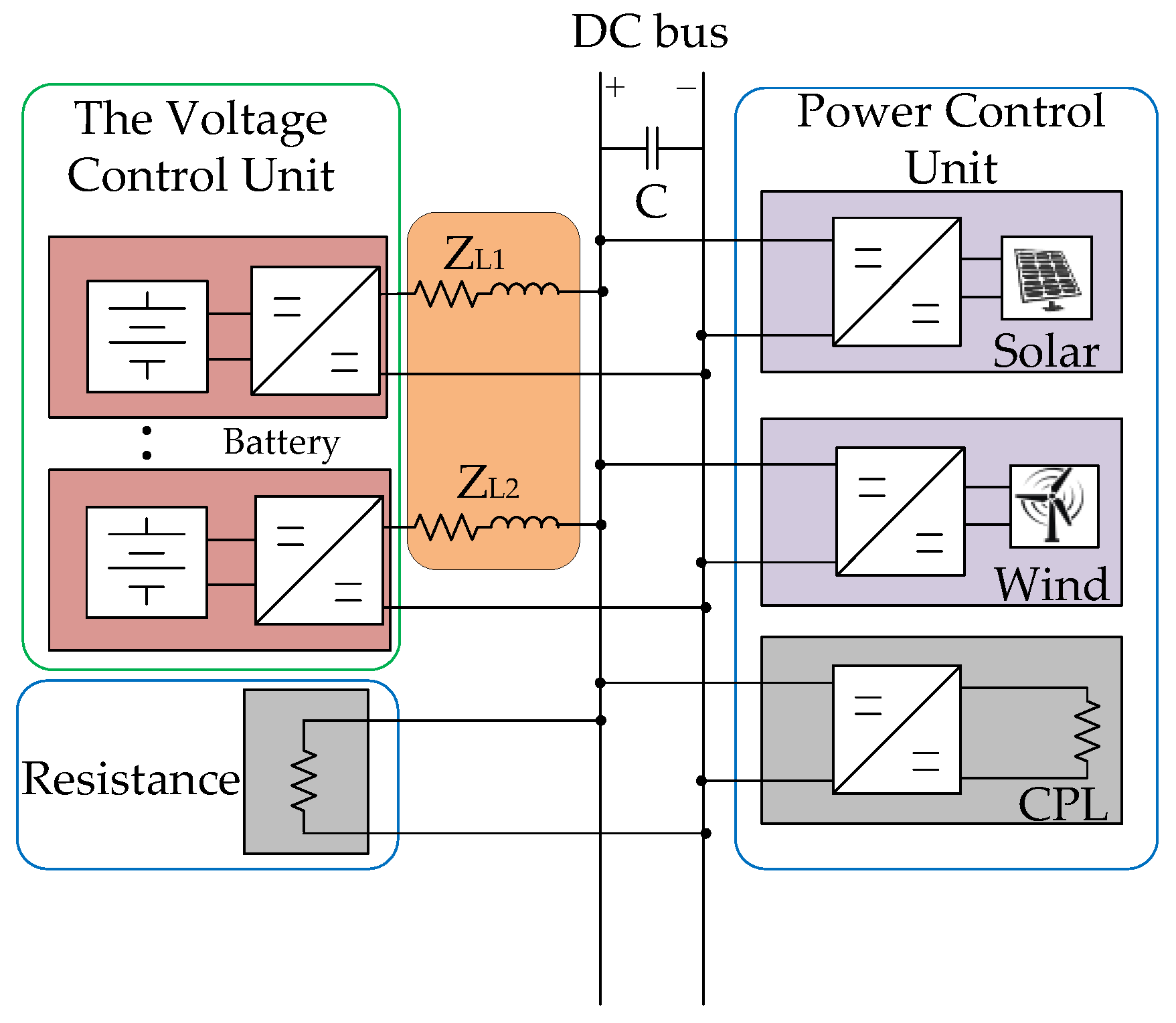
2. Structure and Modeling of Island DC Microgrid
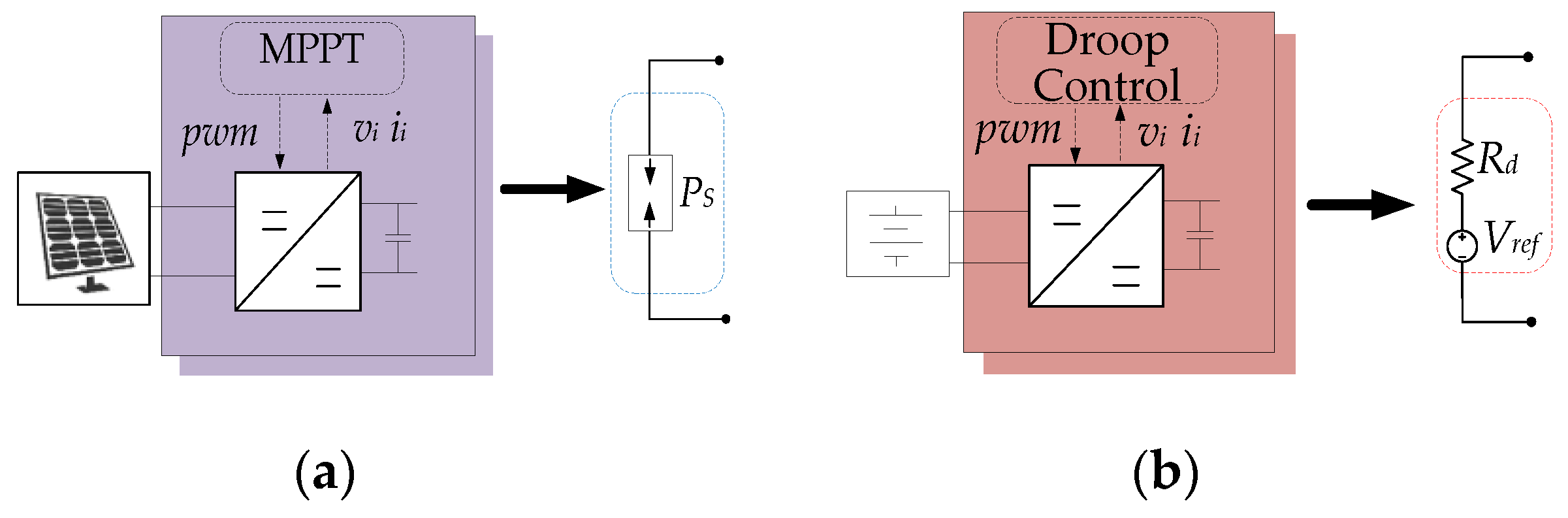
2.1. Modeling of Distributed Power Unit
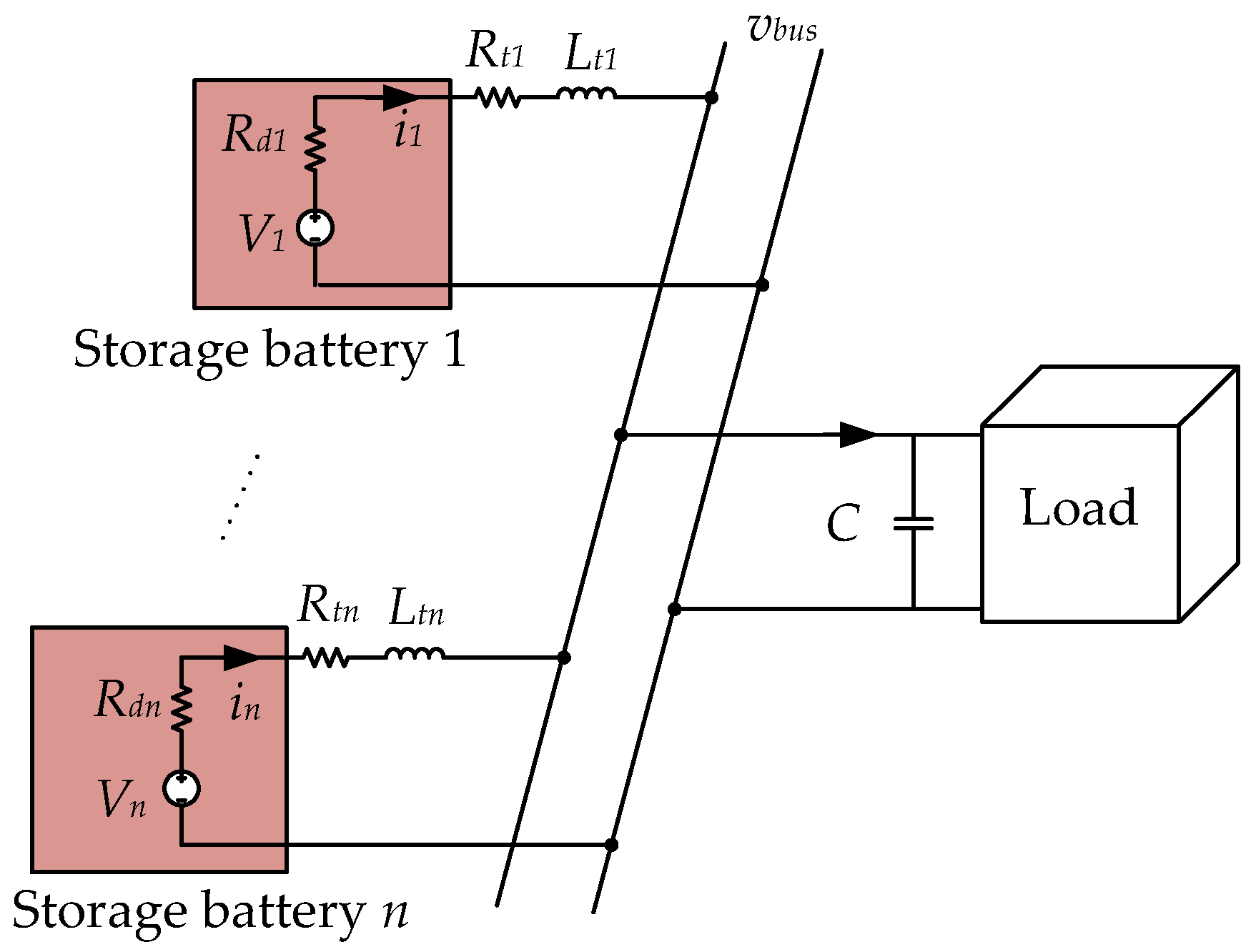
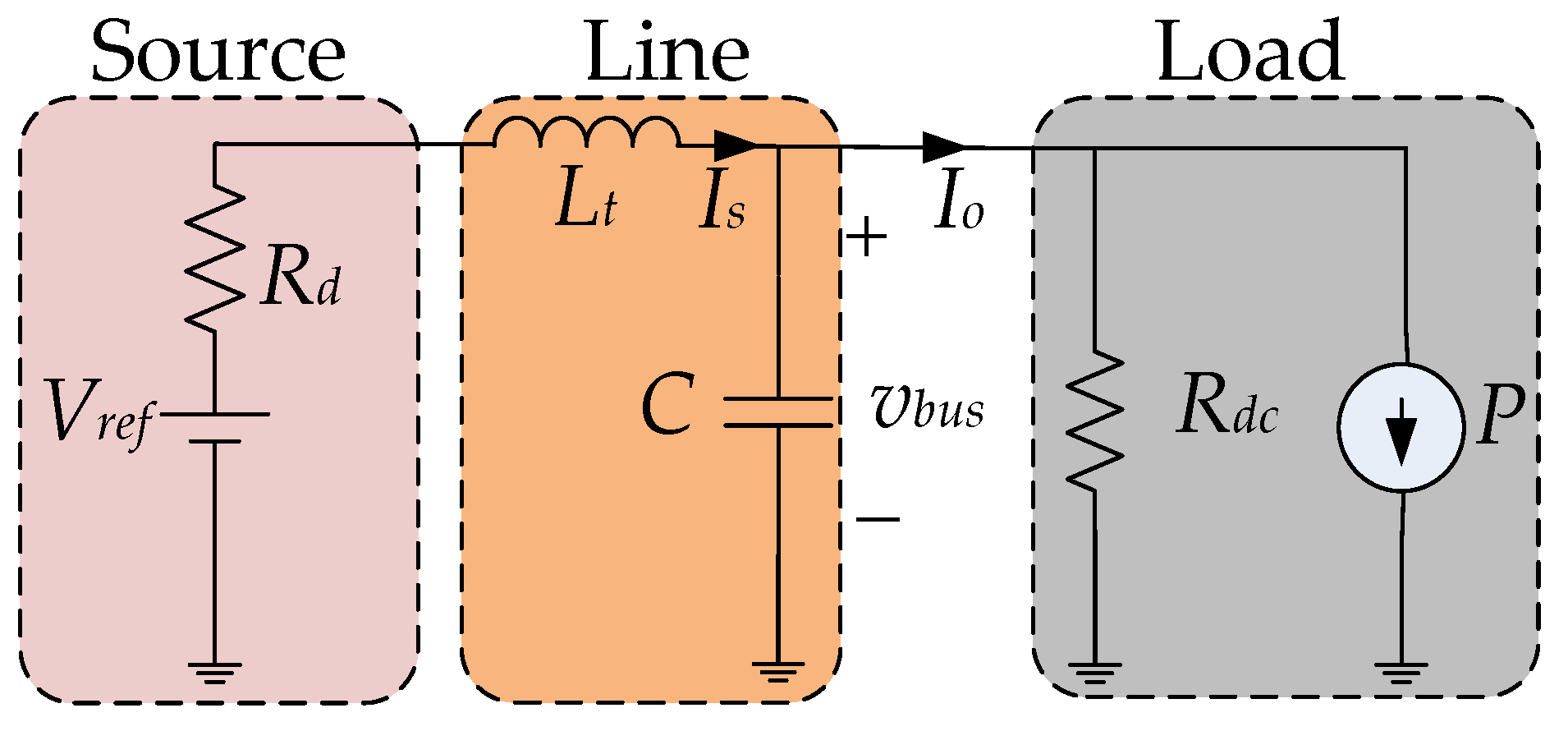
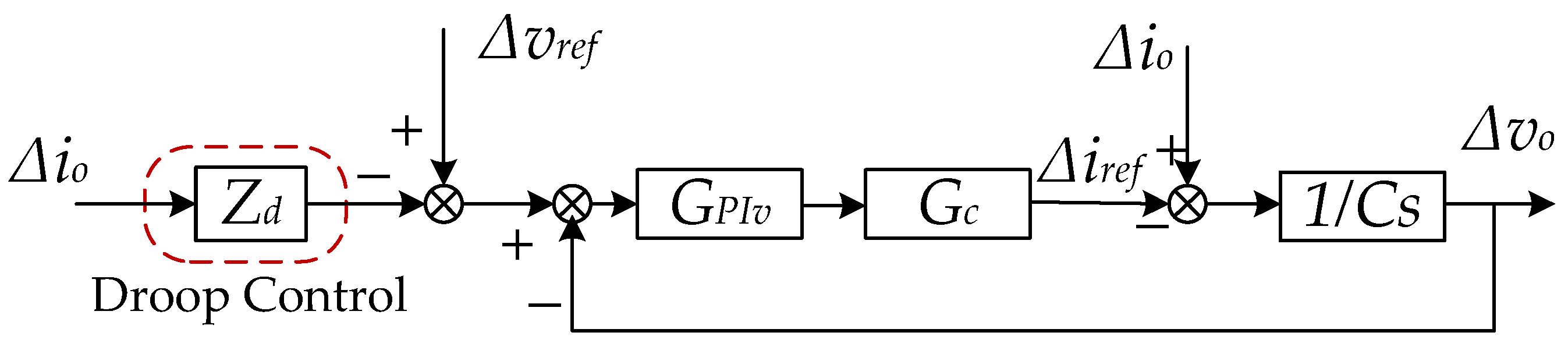
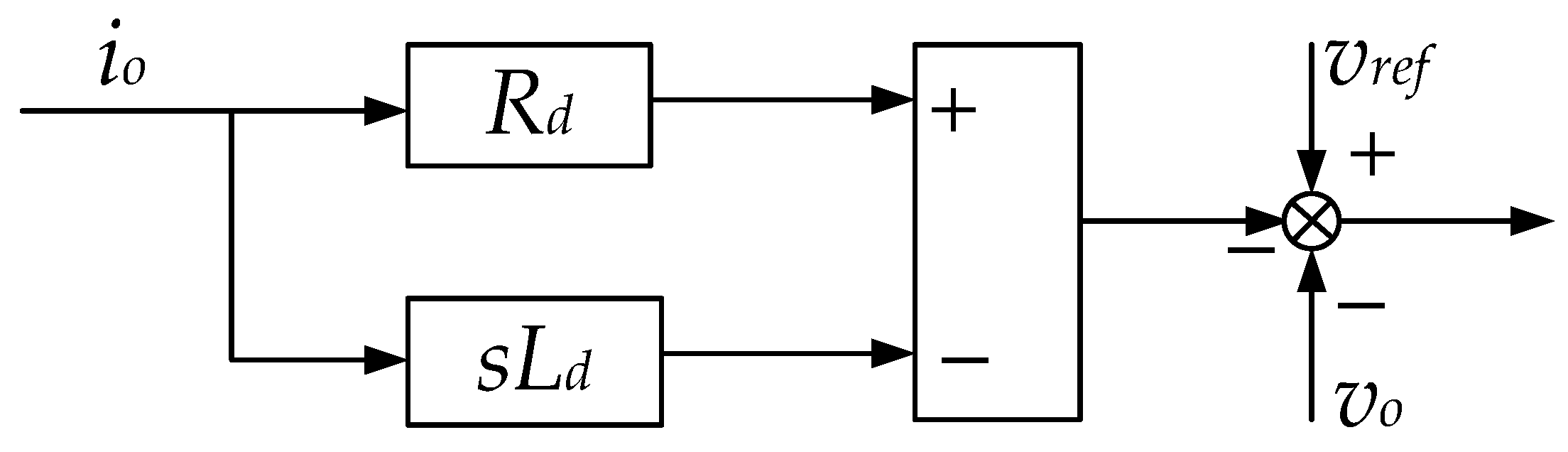
2.2. Dimension Reduction Modeling of Multi-Voltage Control Unit under Droop Control

3. Virtual Inductive Control Strategy
3.1. Definition of Instability
3.2. Virtual Inductance Control Strategy

4. Simulation Verification
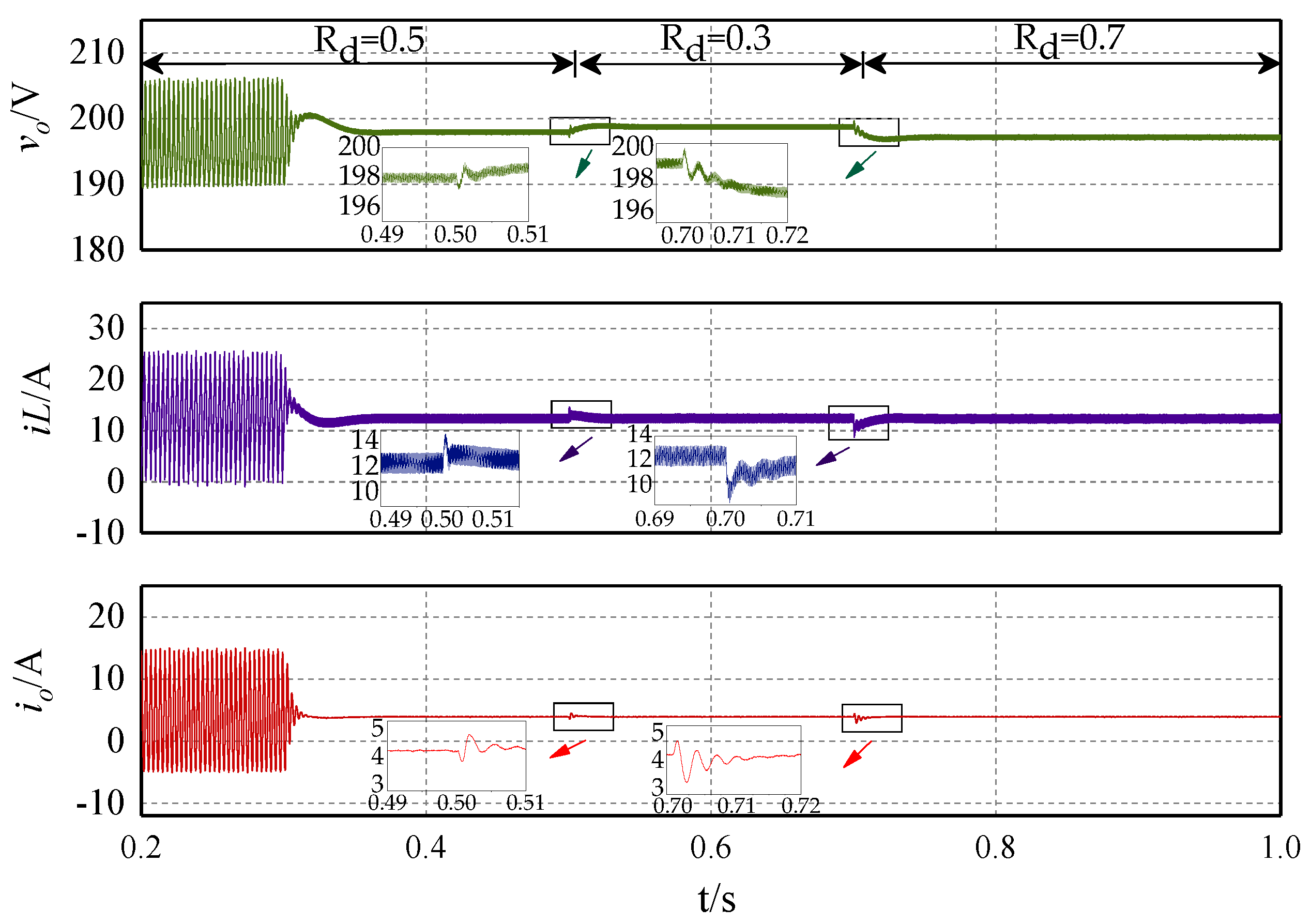
4.1. Change of Droop Coefficients
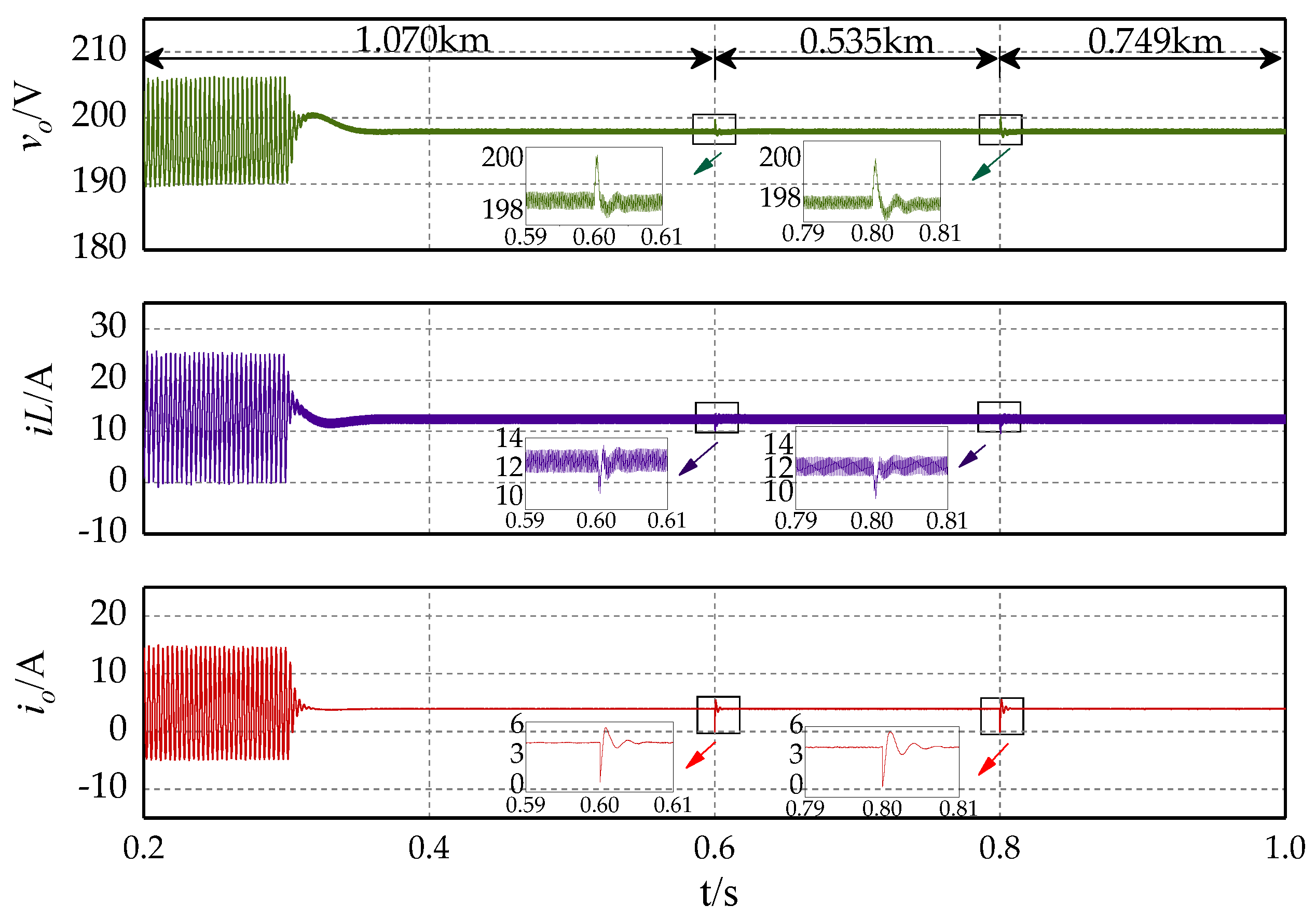
4.2. Change of Line Lengths
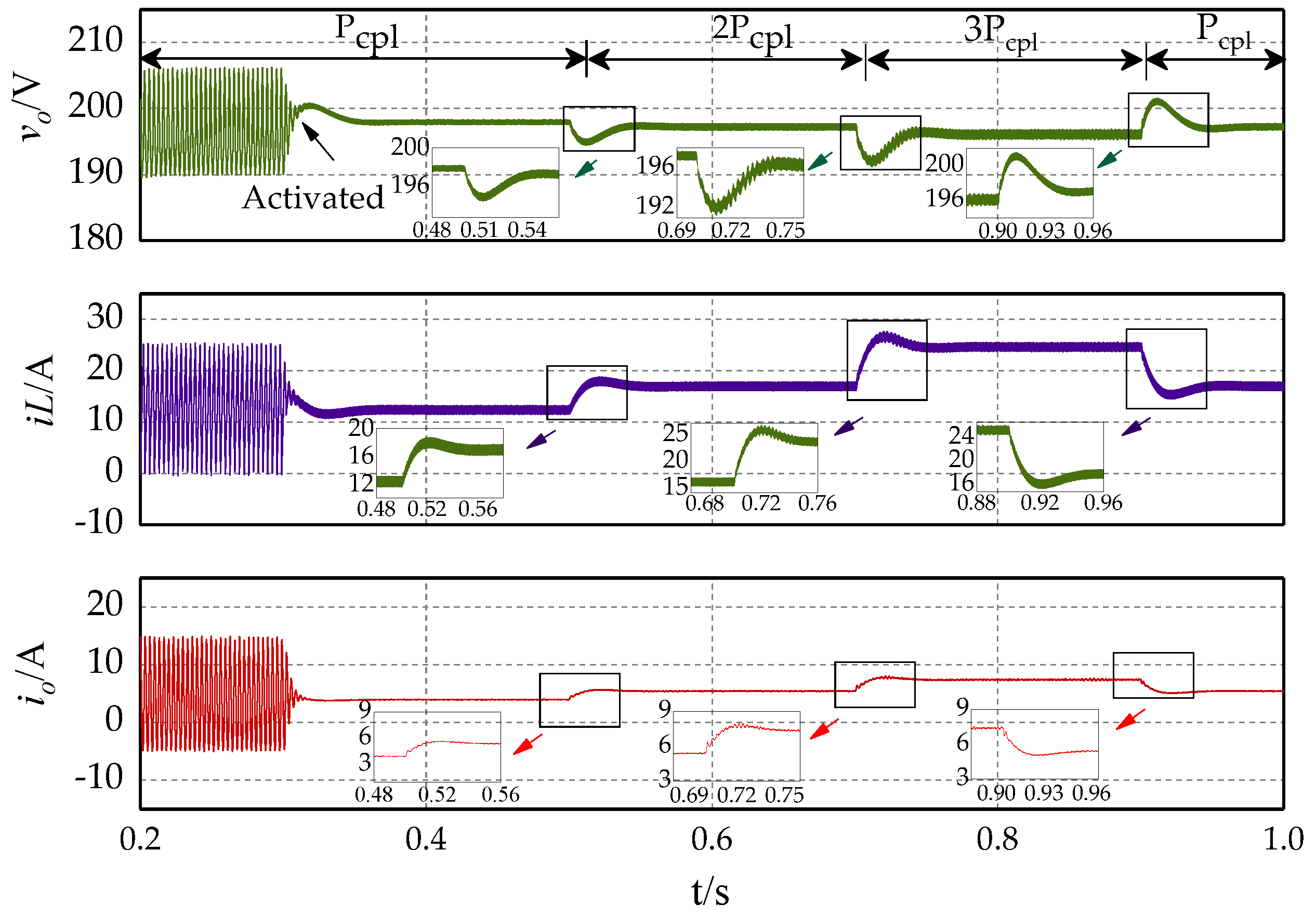
4.3. Change of Operating Points
5. Conclusions
- (1)
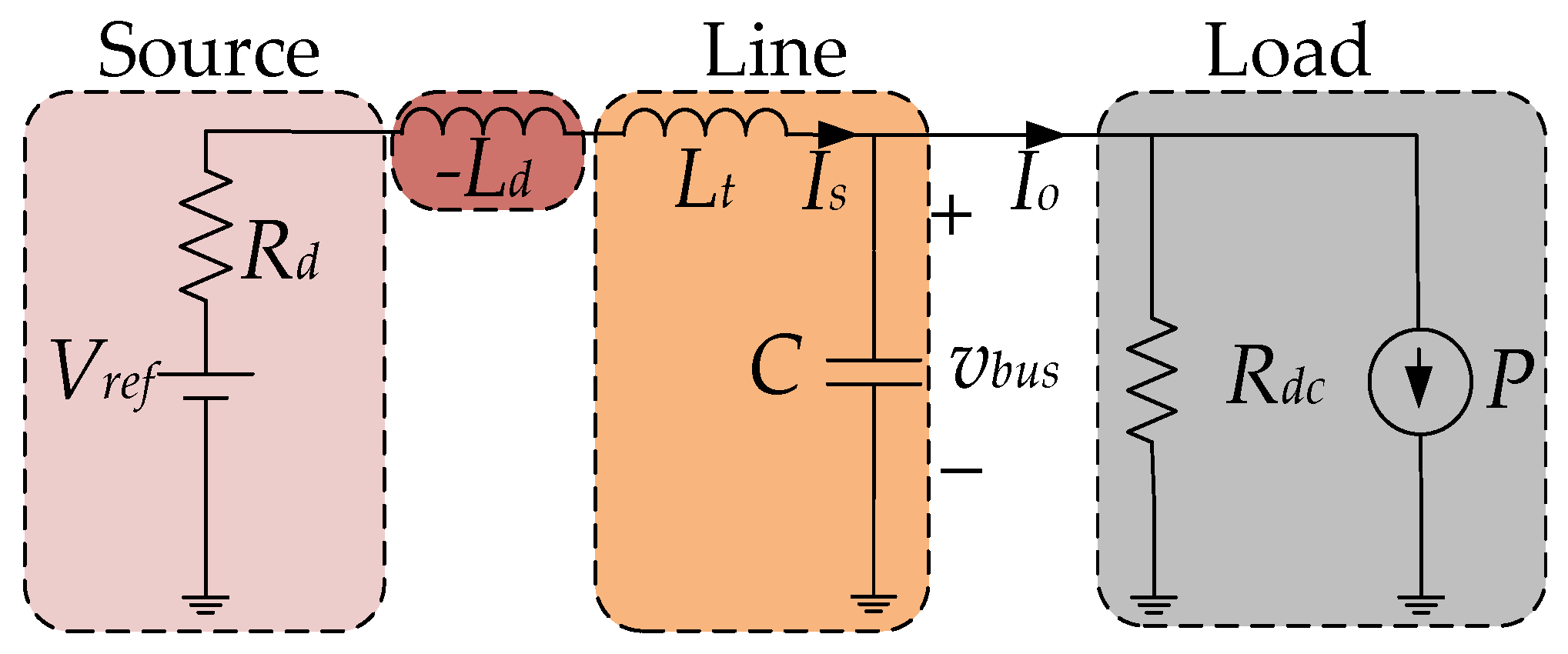
- Complex multi-dimensional DC microgrid systems are not conducive to analysis. So, a concise system model was obtained by simplifying the distributed generation model and the multi-branch model. Moreover, the model takes into account multiple types of power supply and loads in a DC microgrid system, which is closer to the actual situation.
- (2)
- The instability caused by constant power loads can be attributed to the change of output current Δi0. The expression of the control strategy in this paper was deduced to solve the problem of current effect. And the form of control strategy was equivalent to adding a negative inductance link to the system model.
- (3)
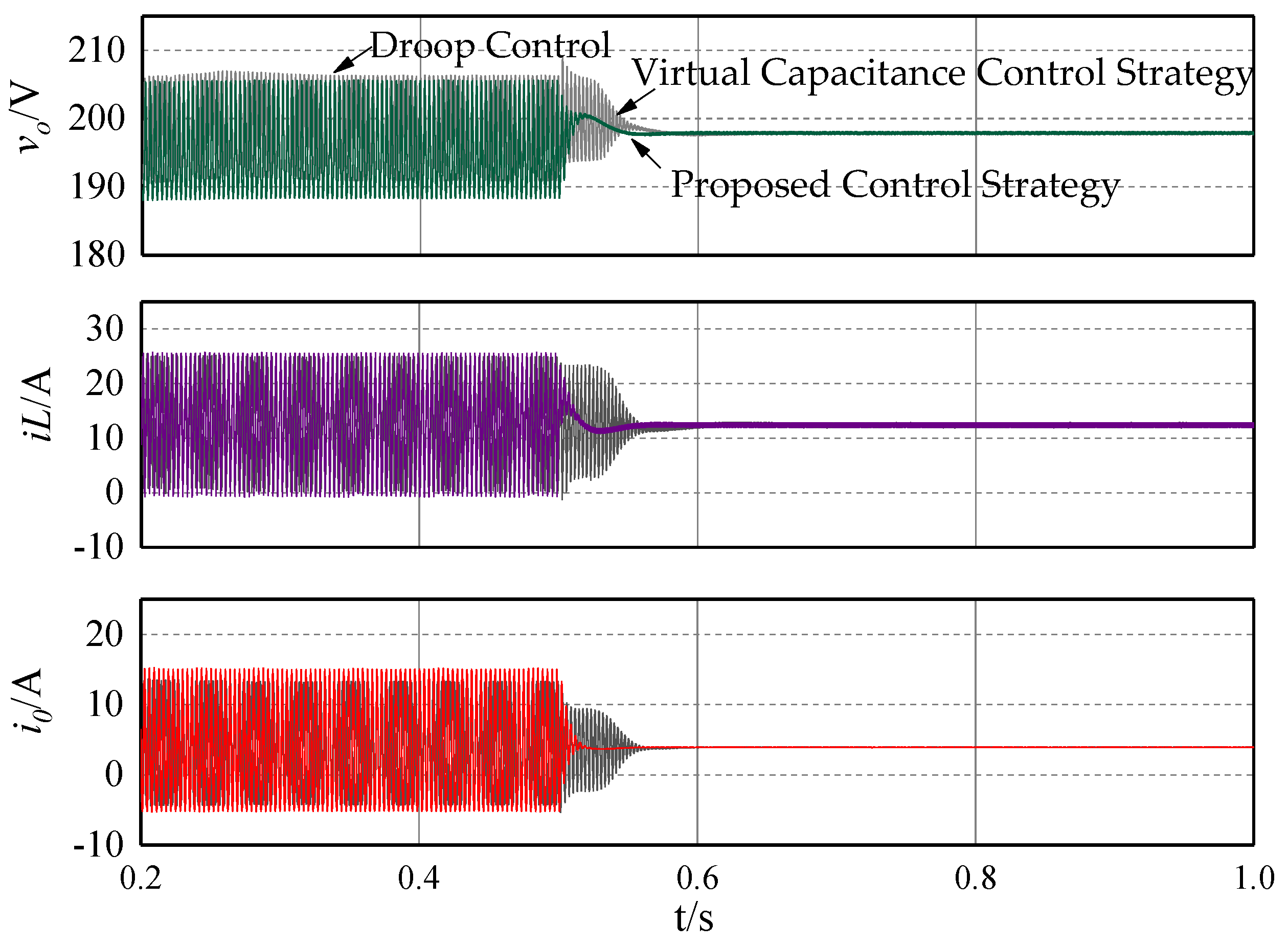
- The effectiveness of this strategy was verified and compared with the existing virtual capacitance control strategy. The results show that this strategy can effectively solve the instability of DC microgrid. It also proves that the proposed strategy has faster and smoother regulation process when compared with the virtual capacitance strategy.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DC | Direct Current |
| AC | Alternating Current |
| CPLs | Constant Power Loads |
| CPSs | Constant Power Sources |
| MPPT | Maximum Power Point Tracking |
| PV | Photovoltaic |
References
- Bayati, N.; Hajizadeh, A.; Soltani, M. Protection in DC microgrids: A comparative review. IET Smart Grid 2018, 1, 66–67. [Google Scholar] [CrossRef]
- Naderi, Y.; Hosseini, S.H.; Ghassem Zadeh, S.; Mohammadi-Ivatloo, B.; Vasquez, J.C.; Guerrero, J.M. An overview of power quality enhancement techniques applied to distributed generation in electrical distribution networks. Renew. Sustain. Energy Rev. 2018, 93, 201–214. [Google Scholar] [CrossRef]
- Kamel, R.M.; Chaouachi, A.; Nagasaka, K. Detailed Analysis of Micro-Grid Stability during Islanding Mode under Different Load Conditions. Engineering 2011, 3, 508–516. [Google Scholar] [CrossRef]
- Shivam; Dahiya, R. Stability analysis of islanded DC microgrid for the proposed distributed control strategy with constant power loads. Comput. Electr. Eng. 2018, 70, 151–162. [Google Scholar] [CrossRef]
- Tahim, A.P.N.; Pagano, D.J.; Lenz, E.; Stramosk, V. Modeling and Stability Analysis of Islanded DC Microgrids Under Droop Control. IEEE Trans. Power Electron. 2015, 30, 4597–4607. [Google Scholar] [CrossRef]
- Su, M.; Liu, Z.; Sun, Y.; Han, H.; Hou, X. Stability Analysis and Stabilization Methods of DC Microgrid with Multiple Parallel-Connected DC–DC Converters Loaded by CPLs. IEEE Trans. Smart Grid 2018, 9, 132–142. [Google Scholar] [CrossRef]
- Pakdeeto, J.; Areerak, K.; Areerak, K. Large-signal model of DC micro-grid systems feeding a constant power load. In Proceedings of the 2017 International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 8–10 March 2017; pp. 1–4. [Google Scholar]
- Liu, Z.; Su, M.; Sun, Y.; Han, H.; Hou, X.; Guerrero, J.M. Stability analysis of DC microgrids with constant power load under distributed control methods. Automatica 2018, 90, 62–72. [Google Scholar] [CrossRef]
- Cespedes, M.; Xing, L.; Sun, J. Constant-Power Load System Stabilization by Passive Damping. IEEE Trans. Power Electron. 2011, 26, 1832–1836. [Google Scholar] [CrossRef]
- Céspedes, M.; Beechner, T.; Xing, L.; Sun, J. Stabilization of constant-power loads by passive impedance damping. In Proceedings of the 2010 Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2174–2180. [Google Scholar]
- Mayo-Maldonado, J.C.; Rapisarda, P. A systematic approach to constant power load stabilization by passive damping. In Proceedings of the IEEE Conference on Decision and Control, Osaka, Japan, 15–18 December 2015; pp. 1346–1351. [Google Scholar]
- Kim, H.-J.; Lee, Y.-S.; Kim, J.-H.; Han, B.-M. Coordinated droop control for stand-alone DC micro-grid. J. Electr. Eng. Technol. 2014, 9, 1072–1079. [Google Scholar] [CrossRef]
- Ko, B.-S.; Lee, G.-Y.; Choi, K.-Y.; Kim, R.-Y. A Coordinated Droop Control Method Using a Virtual Voltage Axis for Power Management and Voltage Restoration of DC Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 9076–9085. [Google Scholar] [CrossRef]
- Cheng, Z.; Li, Z.; Liang, J.; Gao, J.; Si, J.; Li, S. Distributed Economic Power Dispatch and Bus Voltage Control for Droop-Controlled DC Microgrids. Energies 2019, 12, 1400. [Google Scholar] [CrossRef]
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An Improved Droop Control Method for DC Microgrids Based on Low Bandwidth Communication with DC Bus Voltage Restoration and Enhanced Current Sharing Accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar] [CrossRef]
- Guo, L.; Zhang, S.; Li, X.; Li, Y.W.; Wang, C.; Feng, Y. Stability Analysis and Damping Enhancement Based on Frequency-Dependent Virtual Impedance for DC Microgrids. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 338–350. [Google Scholar] [CrossRef]
- Wu, W.; Chen, Y.; Zhou, L.; Zhou, X.; Yang, L.; Dong, Y.; Xie, Z.; Luo, A. A Virtual Phase-Lead Impedance Stability Control Strategy for the Maritime VSC–HVDC System. IEEE Trans. Ind. Inform. 2018, 14, 5475–5486. [Google Scholar] [CrossRef]
- Zhu, X.; Xie, Z.; Jing, S.; Ren, H. Distributed virtual inertia control and stability analysis of dc microgrid. IET Gener. Transm. Distrib. 2018, 12, 3477–3486. [Google Scholar] [CrossRef]
- Hosseinipour, A.; Hojabri, H. Virtual inertia control of PV systems for dynamic performance and damping enhancement of DC microgrids with constant power loads. IET Renew. Power Gener. 2018, 12, 430–438. [Google Scholar] [CrossRef]
- Huangfu, Y.; Pang, S.; Nahid-Mobarakeh, B.; Guo, L.; Rathore, A.K.; Gao, F. Stability Analysis and Active Stabilization of On-board DC Power Converter System with Input Filter. IEEE Trans. Ind. Electron. 2018, 65, 790–799. [Google Scholar] [CrossRef]
- Anand, S.; Fernandes, B.G. Reduced-Order Model and Stability Analysis of Low-Voltage DC Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 5040–5049. [Google Scholar] [CrossRef]
- Tah, A.; Das, D. Analysis on different aspects of interconnected DC microgrids. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016; pp. 1–6. [Google Scholar]
- Gunasekaran, M.; Ismail, H.M.; Chokkalingam, B.; Mihet-Popa, L.; Padmanaban, S. Energy Management Strategy for Rural Communities’ DC Micro Grid Power System Structure with Maximum Penetration of Renewable Energy Sources. Appl. Sci. 2018, 8, 585. [Google Scholar] [CrossRef]
- Marcon, P.; Szabo, Z.; Vesely, I.; Zezulka, F.; Sajdl, O.; Roubal, Z.; Dohnal, P. A Real Model of a Micro-Grid to Improve Network Stability. Appl. Sci. 2017, 7, 757. [Google Scholar] [CrossRef]
- Xu, L.; Chen, D. Control and Operation of a DC Microgrid with Variable Generation and Energy Storage. IEEE Trans. Power Deliv. 2011, 26, 2513–2522. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, Q.; Chen, S.; Huang, J.; Zhou, L. DC current bus distributed power system and its stability analysis. IET Power Electron. 2019, 12, 458–464. [Google Scholar] [CrossRef]
- Chang, Y.C.; Chang, H.C.; Huang, C.Y. Design and Implementation of the Battery Energy Storage System in DC Micro-Grid Systems. Energies 2018, 11, 1566. [Google Scholar] [CrossRef]
- Li, Y.; Fan, L. Stability Analysis of Two Parallel Converters with Voltage–Current Droop Control. IEEE Trans. Power Deliv. 2017, 32, 2389–2397. [Google Scholar] [CrossRef]
- Mokhtar, M.; Marei, M.I.; El-Sattar, A.A. An Adaptive Droop Control Scheme for DC Microgrids Integrating Sliding Mode Voltage and Current Controlled Boost Converters. IEEE Trans. Smart Grid 2019, 10, 1685–1693. [Google Scholar] [CrossRef]
- Moussa, S.; Ghorbal, M.J.; Slama-Belkhodja, I.; Martin, J.; Pierfederici, S. DC bus voltage instability detection and stabilization under constant power load variation. In Proceedings of the 2018 9th International Renewable Energy Congress (IREC), Hammamet, Tunisia, 20–22 March 2018; pp. 1–6. [Google Scholar]
- Xiao, B.; Dai, D.; Zhang, B.; Han, Y. Bifurcation and its analysis of DC Micro-Grid under abrupt load change. J. Electr. Eng. 2016, 31, 131–141. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Magnitude |
|---|---|
| Input Voltage | 100 v |
| Bus Voltage | 200 v |
| Filter Inductor | 13.68 mH/0.4Ω |
| Bus Capacitance | 840 μF |
| Switching frequency | 10 kHz |
| Droop coefficient | 0.5 |
| Resistive load | 100 Ω |
| Line inductor | 0.5 mH |
| Proportional Coefficient of Current Controller | 0.5 |
| Integral Coefficient of Current Controller | 100 |
| Proportional Coefficient of Voltage Controller | 1.2 |
| Integral Coefficient of Voltage Controller | 250 |
| Filter Coefficient | 0.0005 |
| Droop Coefficient | 0.5 |
| virtual inductive | 5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Z.; Gong, M.; Gao, J.; Li, Z.; Si, J. Research on Virtual Inductive Control Strategy for Direct Current Microgrid with Constant Power Loads. Appl. Sci. 2019, 9, 4449. https://doi.org/10.3390/app9204449
Cheng Z, Gong M, Gao J, Li Z, Si J. Research on Virtual Inductive Control Strategy for Direct Current Microgrid with Constant Power Loads. Applied Sciences. 2019; 9(20):4449. https://doi.org/10.3390/app9204449
Chicago/Turabian StyleCheng, Zhiping, Meng Gong, Jinfeng Gao, Zhongwen Li, and Jikai Si. 2019. "Research on Virtual Inductive Control Strategy for Direct Current Microgrid with Constant Power Loads" Applied Sciences 9, no. 20: 4449. https://doi.org/10.3390/app9204449
APA StyleCheng, Z., Gong, M., Gao, J., Li, Z., & Si, J. (2019). Research on Virtual Inductive Control Strategy for Direct Current Microgrid with Constant Power Loads. Applied Sciences, 9(20), 4449. https://doi.org/10.3390/app9204449