A Lateral-Directional Control Method for High Aspect Ratio Full-Wing UAV and Flight Tests


Abstract
1. Introduction
2. Mathematical Model and Flying Qualities
2.1. Lateral-Directional Mathematical Model
2.2. Flying Qualities
3. Lateral-Directional Control Law Design
3.1. Lateral-Directional Attitude Control Law Based on ADRC and NDI
3.1.1. Yaw Angle Control Loop
3.1.2. Yaw Angle Rate Control Loop
3.2. Lateral-Directional Trajectory Tracking Control Law Based on VF
4. Simulations and Flight Tests
4.1. Simulations
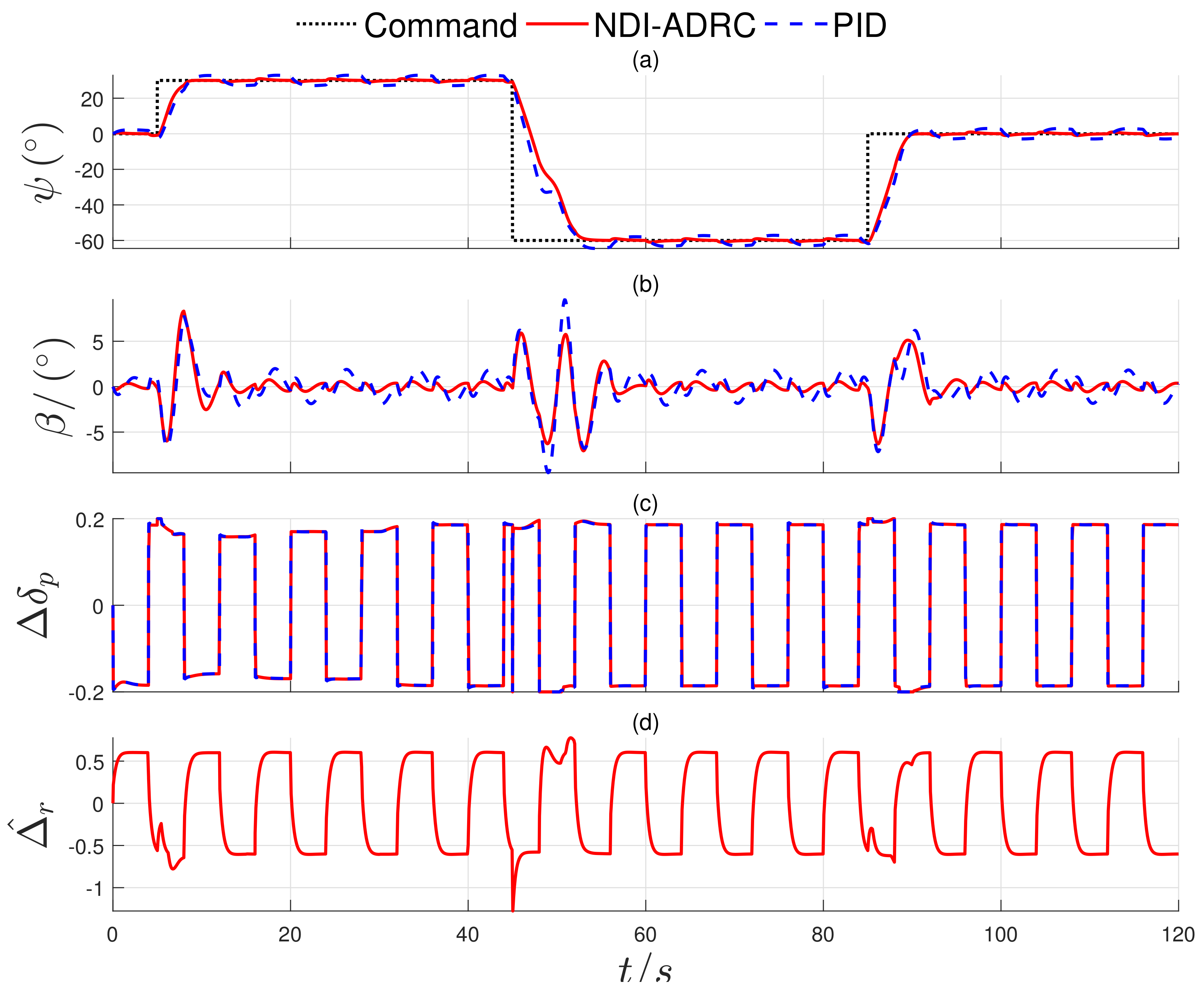
4.1.1. Attitude Control
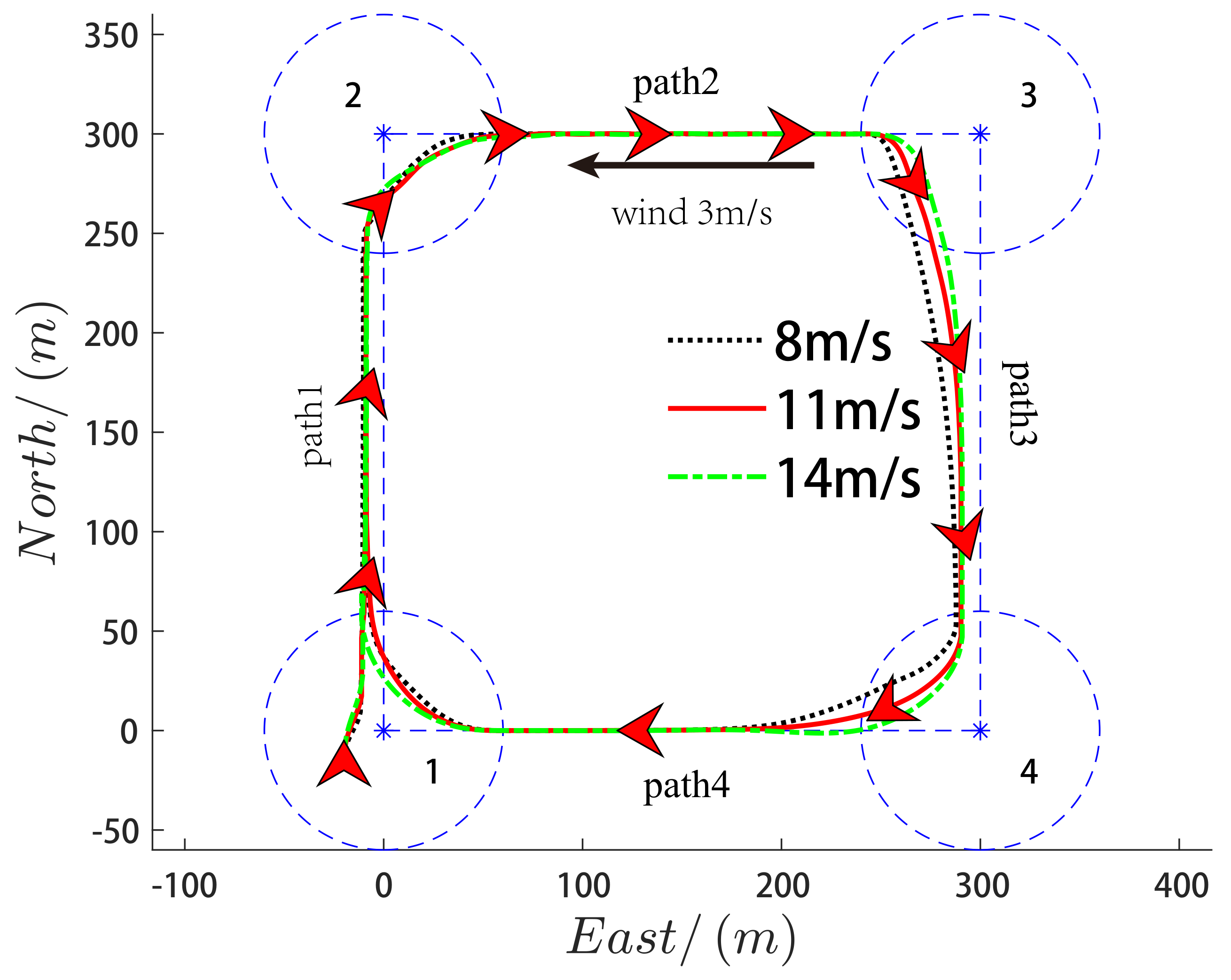
4.1.2. Trajectory Tracking Control
4.2. Flight Tests
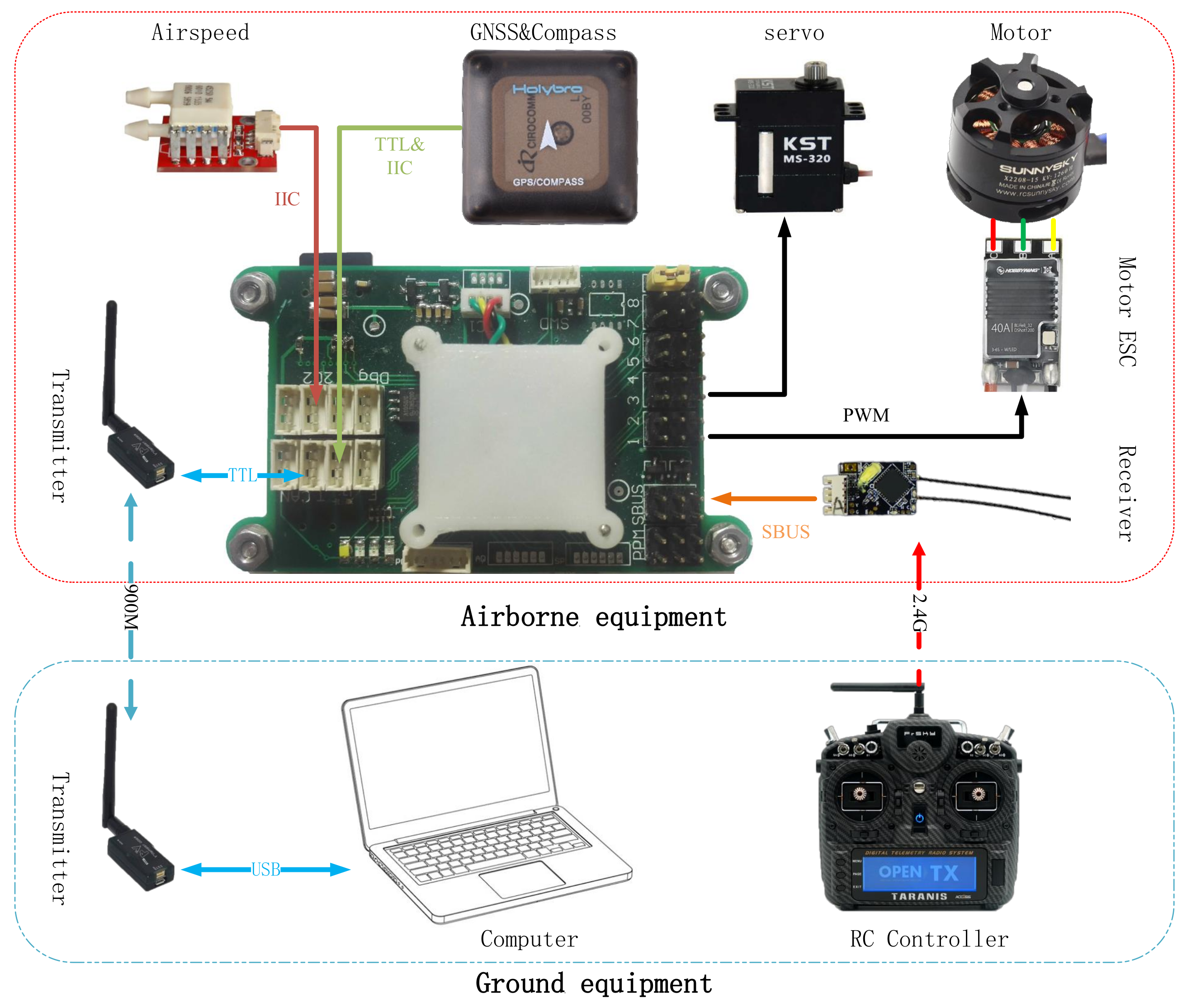
4.2.1. Flight Test Bed
4.2.2. Flight Test Results
5. Conclusions
- (a)
- was very important for the dutch roll mode of the high aspect ratio full-wing UAV. Large can significantly improve the dutch roll mode damping.
- (b)
- It was feasible and effective to use the yaw angle instead of the roll angle as the controlled state for the high aspect ratio full-wing UAV. The differential propeller thrust had good control efficiency, which can replace an aileron and rudder to control the drone’s lateral-direction.
- (c)
- The simulation and experiment results show that the lateral-directional control method for the high aspect ratio full-wing UAV designed in this paper had a good control effect, robustness, and disturbance rejection ability. At the same time, the controller had less calculation, fewer parameters to be adjusted, and a simple implementation process, which is very important for engineering applications.
Author Contributions
Funding
Conflicts of Interest
References
- Ehernberger, L.J.; Donohue, C.; Teets, E.H. A review of solar-powered aircraft flight activity at the Pacific missile range test facility, Kauai, Hawaii. In Proceedings of the 11th AMS Conference on Aviation, Range, and Aerospace Meteorology, Hyannis, MA, USA, 4–8 October 2004; pp. 1–6. [Google Scholar]
- Colella, N.J.; Wenneker, G.S. Pathfinder. Developing a solar rechargeable aircraft. IEEE Potentials 1996, 15, 18–23. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the IEEE American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 2399–2405. [Google Scholar]
- Li, H.; He, B.; Yin, Q.; Mu, X.; Zhang, J.; Wan, J.; Wang, D.; Shen, Y. Fuzzy Optimized MFAC Based on ADRC in AUV Heading Control. Electronics 2019, 8, 608. [Google Scholar] [CrossRef]
- Lotufo, M.A.; Colangelo, L.; Perez-Montenegro, C.; Canuto, E.; Novara, C. UAV quadrotor attitude control: An ADRC-EMC combined approach. Control Eng. Pract. 2019, 84, 13–22. [Google Scholar] [CrossRef]
- Sun, J.; Pu, Z.; Yi, J. Conditional disturbance negation based active disturbance rejection control for hypersonic vehicles. Control Eng. Pract. 2019, 84, 159–171. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, Z.; Zhang, X.; Sun, Q.; Sun, M. A novel control scheme for quadrotor UAV based upon active disturbance rejection control. Aerosp. Sci. Technol. 2018, 79, 601–609. [Google Scholar] [CrossRef]
- Fields, M.A. Flight controller learning based on real-time model estimation of a quadrotor aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 3298–3312. [Google Scholar] [CrossRef]
- Wang, X.; Van Kampen, E.; Chu, Q.P.; De Breuker, R. Flexible Aircraft Gust Load Alleviation with Incremental Nonlinear Dynamic Inversion. J. Guid. Control Dyn. 2019, 42, 1519–1536. [Google Scholar] [CrossRef]
- Tripathi, A.K.; Patel, V.V.; Padhi, R. Autonomous Landing of UAVs under Unknown Disturbances using NDI Autopilot with L-1 Adaptive Augmentation. IFAC PapersOnline 2017, 50, 3680–3684. [Google Scholar] [CrossRef]
- Snell, S.A.; Nns, D.F.; Arrard, W.L. Nonlinear inversion flight control for a supermaneuverable aircraft. J. Guid. Control Dyn. 1992, 15, 976–984. [Google Scholar] [CrossRef]
- Nelson, D.R.; Barber, D.B.; McLain, T.W.; Beard, R.W. Vector field path following for miniature air vehicles. IEEE Trans. Robot. 2007, 23, 519–529. [Google Scholar] [CrossRef]
- Oh, H.; Kim, S. Persistent standoff tracking guidance using constrained particle filter for multiple UAVs. Aerosp. Sci. Technol. 2019, 84, 257–264. [Google Scholar] [CrossRef]
- Yu, Z.; Qu, Y.; Zhang, Y. Safe Control of Trailing UAV in Close Formation Flight against Actuator Fault and Wake Vortex Effect. Aerosp. Sci. Technol. 2018, 77, 189–205. [Google Scholar] [CrossRef]
- Kownacki, C.; Ambroziak, L. Local and Asymmetrical Potential Field Approach to Leader Tracking Problem in Rigid Formations of Fixed-Wing UAVs. Aerosp. Sci. Technol. 2017, 68, 465–474. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths With Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef]
- Park, S.; Deyst, J.; How, J.P. Performance and Lyapunov Stability of a Nonlinear Path Following Guidance Method. J. Guid. Control Dyn. 2007, 30, 1718–1728. [Google Scholar] [CrossRef]
- Lee, S.; Cho, A.; Kee, C. Integrated waypoint path generation and following of an unmanned aerial vehicle. Aircr. Eng. Aerosp. Technol. 2010, 82, 296–304. [Google Scholar] [CrossRef]
- Sujit, P.; Saripalli, S.; Sousa, J.B. Unmanned aerial vehicle path following: A survey and analysis of algorithms for fixed-wing unmanned aerial vehicless. IEEE Control Syst. 2014, 34, 42–59. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar]
- Ma, Z.; Zhu, X.; Zhou, Z. On-ground lateral direction control for an unswept flying-wing UAV. Aeronaut. J. 2019, 123, 416–432. [Google Scholar] [CrossRef]
- Meola, D.; Iannelli, L.; Glielmo, L. Flight control system for small-size unmanned aerial vehicles: Design and software-in-the-loop validation. In Proceedings of the Mediterranean Conference on Control & Automation, Chania, Greece, 25–28 June 2013; IEEE: Platanias, Greece, 2013; pp. 357–362. [Google Scholar]
- Herwitz, S.; Dunagan, S.; Sullivan, D.; Higgins, R.; Johnson, L.; Zheng, J.; Slye, R.; Brass, J.; Leung, J.; Gallmeyer, B.; et al. Solar-powered UAV Mission for Agricultural Decision Support. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 3, pp. 1692–1694. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Basic Parameters | M | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| full-wing configuration | 1.053 | 0.160 | 0.164 | −0.400 | −0.118 | 0.020 | −0.671 | −0.040 | 0.113 | −0.003 |
| conventional configuration | 1.090 | 0.111 | 0.208 | −0.143 | −0.143 | 0.016 | −0.707 | −0.036 | 0.102 | −0.014 |
| Roll Subsidence Mode | Dutch Roll Mode | Spiral Mode | |||
|---|---|---|---|---|---|
| Mode Parameters | Characteristic | Characteristic | Damping Ratio | Natural Frequency | Characteristic |
| full-wing | −13.34 | 0.17 | 1.50 | −0.050 | |
| conventional | −18.98 | 0.16 | 3.44 | −0.055 | |
| Roll Subsidence Mode | Dutch Roll Mode | Spiral Mode | |||
|---|---|---|---|---|---|
| Characteristic | Characteristic | Damping Ratio | Natural Frequency | Characteristic | |
| −0.1 | −13.32 | −0.014 | 1.48 | −0.050 | |
| −0.2 | −13.33 | 0.059 | 1.49 | −0.050 | |
| −0.3 | −13.33 | 0.13 | 1.50 | −0.051 | |
| −0.4 | −13.34 | 0.17 | 1.50 | −0.051 | |
| Parameters | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Values | 1 | 300 | 400 | 0.5 | 0.1 | 10 | 0.2 | 0.75 | ||
| Equation | (11) | (13) | (16) | (16) | (17) | (17) | (18) | (19) | (22) | (23) |
| Processor | Accelerate & Gyro | Compass | Air Speed | GNSS | Motor | Propeller |
|---|---|---|---|---|---|---|
| Stm32f407 | Mpu6050 | Hmc5983 | Ms4525do | Ublox m8n | 2212-1400 | APC8060 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Zhu, X.; Zhou, Z.; Zou, X.; Zhao, X. A Lateral-Directional Control Method for High Aspect Ratio Full-Wing UAV and Flight Tests. Appl. Sci. 2019, 9, 4236. https://doi.org/10.3390/app9204236
Ma Z, Zhu X, Zhou Z, Zou X, Zhao X. A Lateral-Directional Control Method for High Aspect Ratio Full-Wing UAV and Flight Tests. Applied Sciences. 2019; 9(20):4236. https://doi.org/10.3390/app9204236
Chicago/Turabian StyleMa, Zhenyu, Xiaoping Zhu, Zhou Zhou, Xu Zou, and Xin Zhao. 2019. "A Lateral-Directional Control Method for High Aspect Ratio Full-Wing UAV and Flight Tests" Applied Sciences 9, no. 20: 4236. https://doi.org/10.3390/app9204236
APA StyleMa, Z., Zhu, X., Zhou, Z., Zou, X., & Zhao, X. (2019). A Lateral-Directional Control Method for High Aspect Ratio Full-Wing UAV and Flight Tests. Applied Sciences, 9(20), 4236. https://doi.org/10.3390/app9204236