Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique



Abstract
1. Introduction
1.1. Related Works
1.2. Main Contributions
1.3. Organization
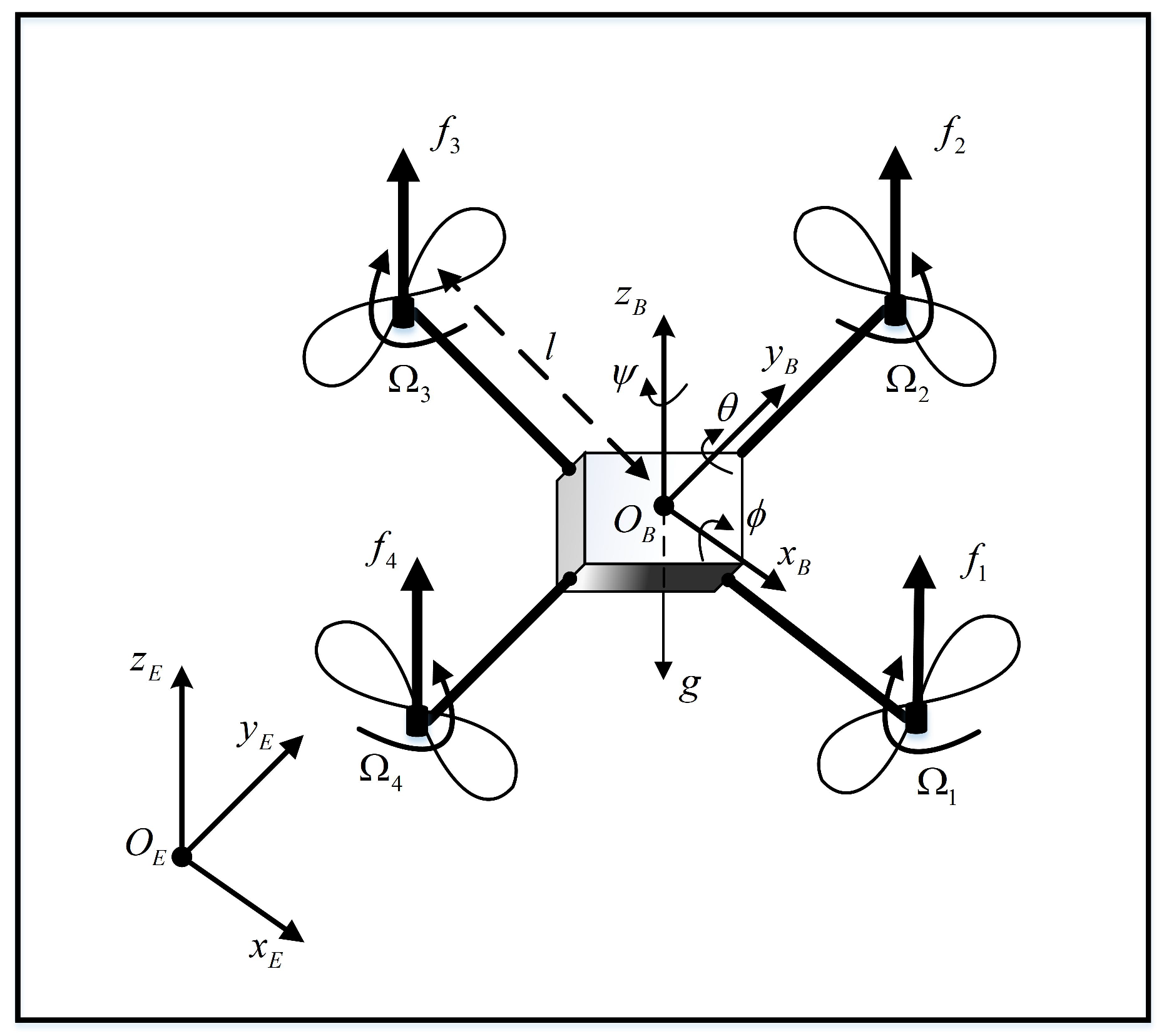
2. Preliminaries and Mathematical Model
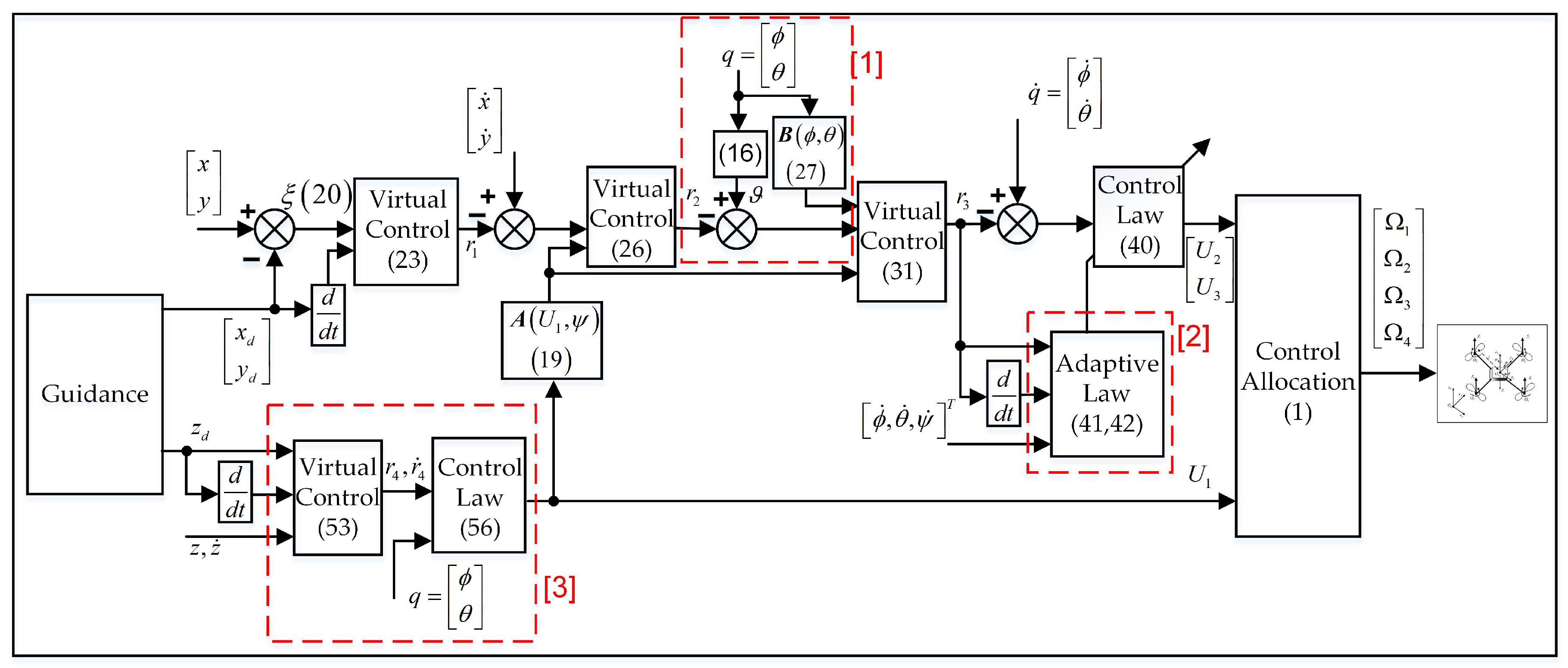
3. Trajectory Tracking Control: Adaptive Backstepping Design and Stability Analysis
3.1. Horizontal Position Controller
3.2. Altitude Controller
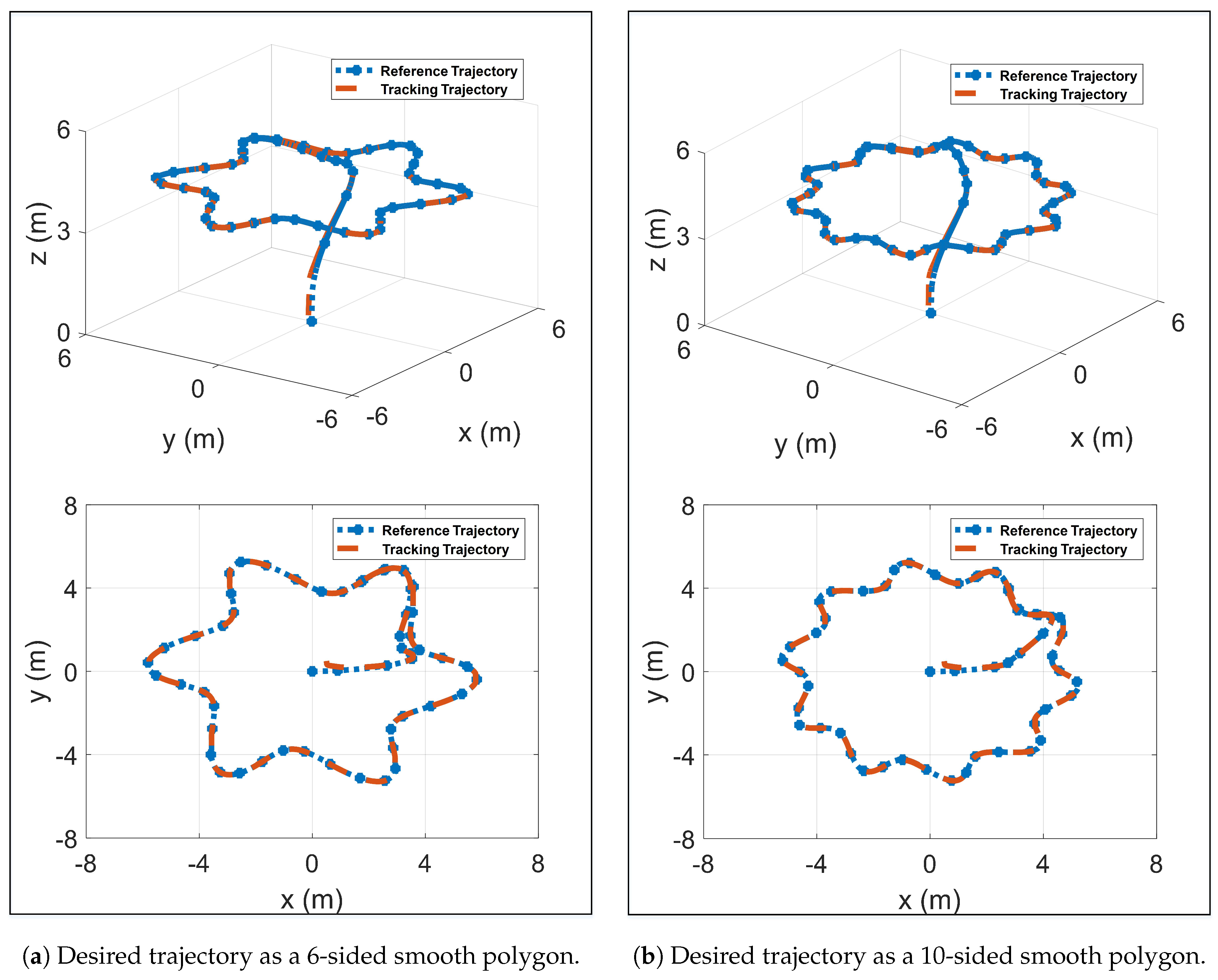
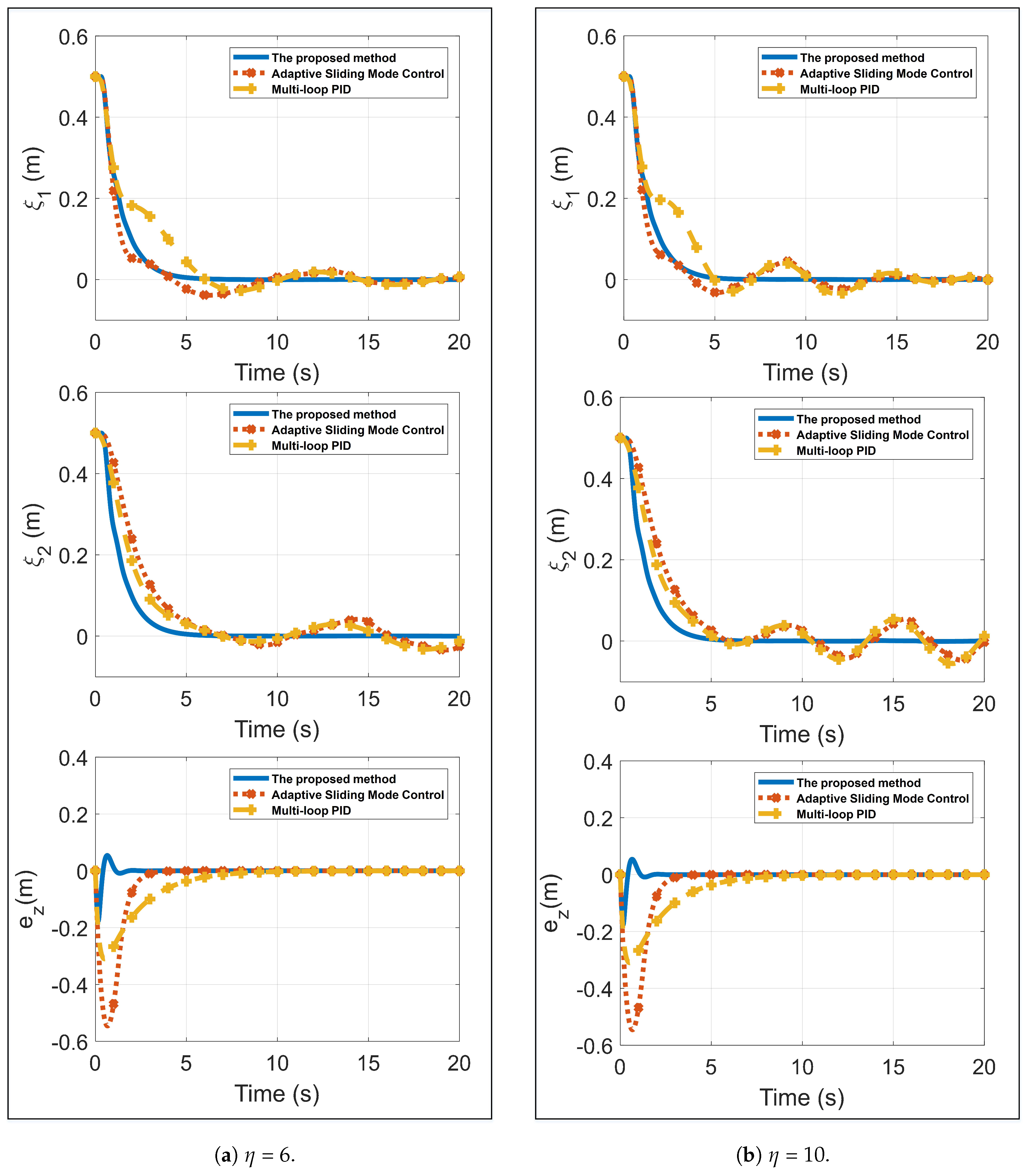
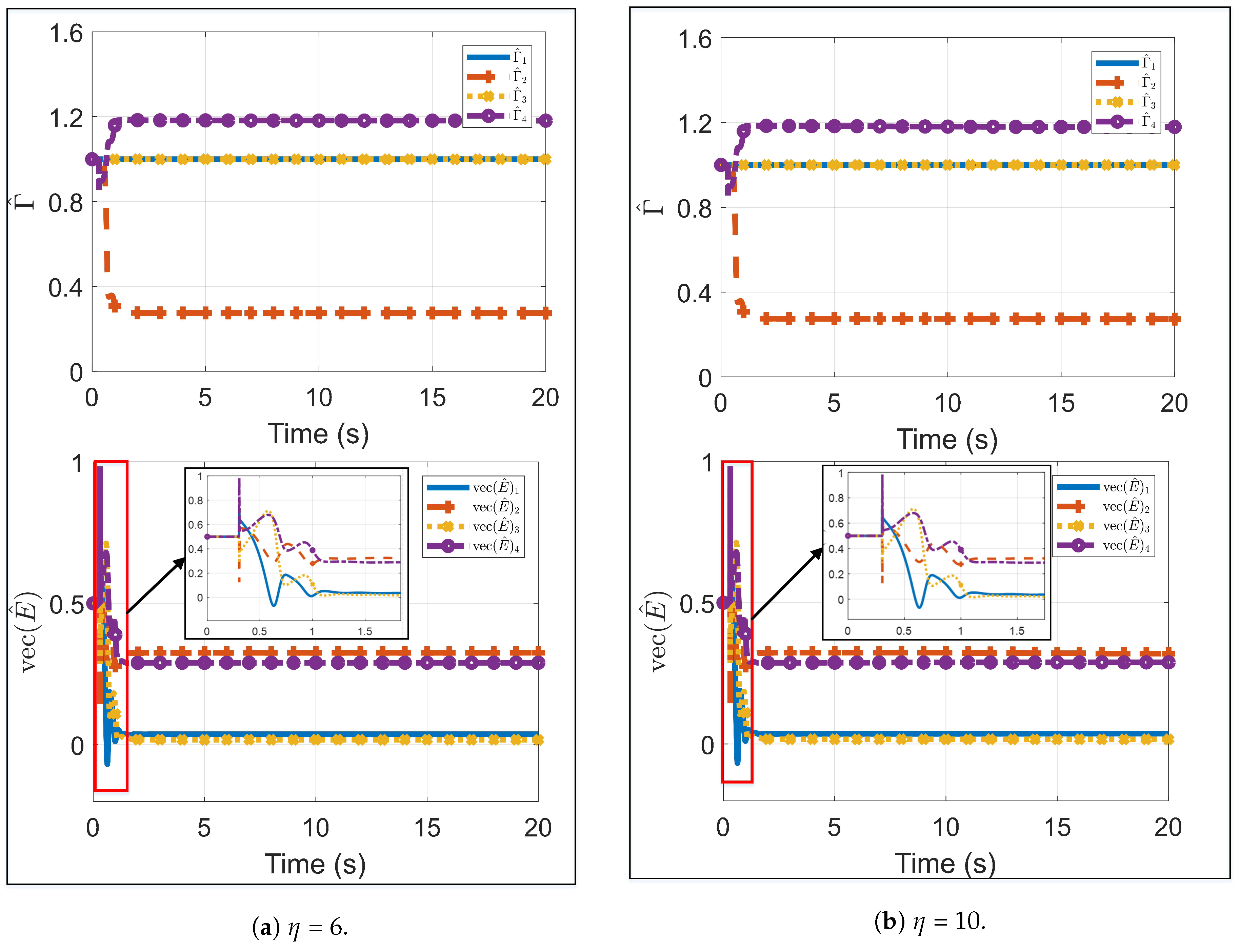
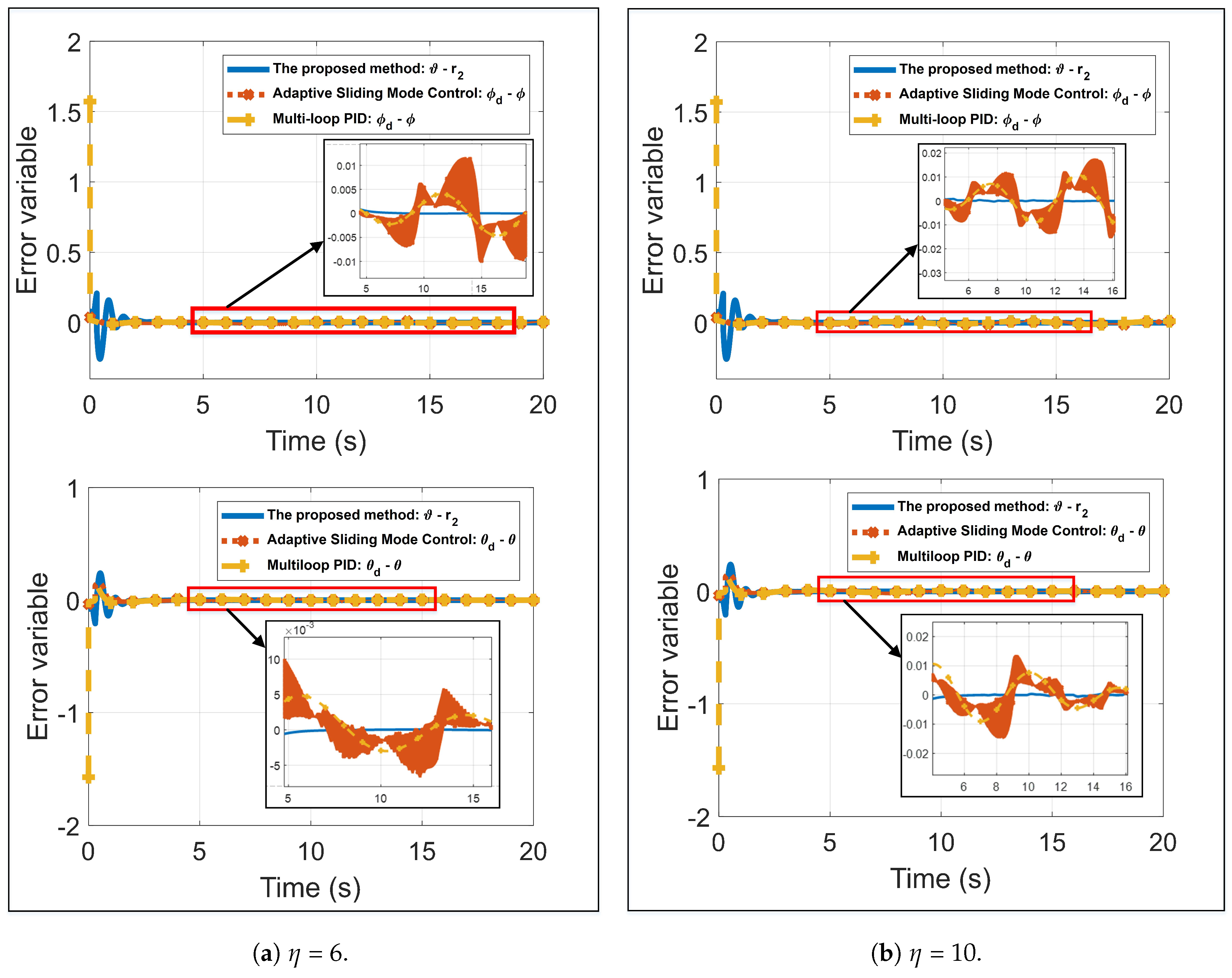
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mogili, U.R.; Deepak, B.B.V.L. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Yallappa, D.; Veerangouda, M.; Maski, D.; Palled, V.; Bheemanna, M. Development and evaluation of drone mounted sprayer for pesticide applications to crops. In Proceedings of the IEEE Global Humanitarian Technology Conference, San Jose, CA, USA, 19–22 October 2017; pp. 1–7. [Google Scholar]
- Suprapto, B.Y.; Heryanto, M.A.; Suprijono, H.; Muliadi, J.; Kusumoputro, B. Design and development of heavy-lift hexacopter for heavy payload. In Proceedings of the International Seminar on Application for Technology of Information and Communication, Semarang, Indonesia, 7–8 October 2017; pp. 242–247. [Google Scholar]
- Benito, J.A.; Glez-de-Rivera, G.; Garrido, J.; Ponticelli, R. Design considerations of a small UAV platform carrying medium payloads. In Proceedings of the Design of Circuits and Integrated Systems, Madrid, Spain, 26–28 November 2014; pp. 1–6. [Google Scholar]
- Naidoo, Y.; Stopforth, R.; Bright, G. Development of an UAV for search & rescue applications. In Proceedings of the IEEE Africon’11, Livingstone, Zambia, 13–15 September 2011; pp. 1–6. [Google Scholar]
- Erdos, D.; Erdos, A.; Watkins, S.E. An experimental UAV system for search and rescue challenge. IEEE Aerosp. Electron. Syst. Mag. 2013, 28, 32–37. [Google Scholar] [CrossRef]
- Mustapa, Z.; Saat, S.; Husin, S.H.; Abas, N. Altitude controller design for multi-copter UAV. In Proceedings of the 2014 International Conference on Computer, Communications, and Control Technology (I4CT), Langkawi, Malaysia, 2–4 September 2014; pp. 382–387. [Google Scholar]
- Santos, M.F.; Pereira, V.S.; Ribeiro, A.C.; Silva, M.F.; Vidal, M.J.D.C.V.F.; Honorio, L.M.; Cerqueira, A.S.; Oliveira, E.J. Simulation and comparison between a linear and nonlinear technique applied to altitude control in quadcopters. In Proceedings of the 18th International Carpathian Control Conference (ICCC), Sinaia, Romania, 28–31 May 2017; pp. 234–239. [Google Scholar]
- Pounds, P.E.I.; Bersak, D.R.; Dollar, A.M. Stability of small-scale UAV helicopters and quadrotors with added payload mass under PID control. Autonom. Rob. 2012, 33, 129–142. [Google Scholar] [CrossRef]
- Salih, A.L.; Moghavvemi, M.; Mohamed, H.A.F.; Gaeid, K.F. Modelling and PID controller design for a quadrotor unmanned air vehicle. In Proceedings of the IEEE International Conference on Automation, Quality and Testing, Robotics (AQTR), Cluj-Napoca, Romania, 28–30 May 2010. [Google Scholar]
- Xuan-Mung, N.; Hong, S.K. Improved Altitude Control Algorithm for Quadcopter Unmanned Aerial Vehicles. Appl. Sci. 2019, 9, 2122. [Google Scholar] [CrossRef]
- Modelling and Control of Quadcopter. Available online: https://www.researchgate.net/file.PostFileLoader.html?id=576d16ed93553b24b5721a9a&assetKey=AS%3A376462596165634%401466767085787 (accessed on 12 September 2019).
- Li, J.; Li, Y. Dynamic analysis and PID control for a quadrotor. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011. [Google Scholar]
- Ahmed, A.H.; Ouda, A.N.; Kamel, A.M.; Elhalwagy, Y.Z. Attitude stabilization and altitude control of quadrotor. In Proceedings of the 12th International Computer Engineering Conference (ICENCO), Cairo, Egypt, 28–29 December 2016. [Google Scholar]
- Khan, H.S.; Kadri, M.B. Attitude and altitude control of quadrotor by discrete PID control and non-linear model Predictive control. In Proceedings of the International Conference on Information and Communication Technologies (ICICT), Karachi, Pakistan, 12–13 December 2015. [Google Scholar]
- Bolandi, H.; Rezaei, M.; Mohsenipour, R.; Nemati, H.; Smailzadeh, S.M. Attitude control of a quadrotor with optimized PID controller. Intell. Control Autom. 2013, 4, 335–342. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Quadcopter robust adaptive second order sliding mode control based on PID sliding surface. IEEE Access 2018, 6, 66850–66860. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Nguyen, N.P.; Hong, S.K. Simple nonlinear control of quadcopter for collision avoidance based on geometric approach in static environment. Int. J. Adv. Rob. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Hong, S.K. Fault-tolerant Control of Quadcopter UAVs Using Robust Adaptive Sliding Mode Approach. Energies 2018, 12, 95. [Google Scholar] [CrossRef]
- Mian, A.A.; Daobo, W. Modeling and backstepping-based nonlinear control strategy for a 6 DOF quadrotor helicopter. Chin. J. Aeronaut. 2008, 21, 261–268. [Google Scholar] [CrossRef]
- Paiva, E.; Soto, J.; Salinas, J.; Ipanaqué, W. Modeling, simulation and implementation of a modified PID controller for stabilizing a quadcopter. In Proceeding of the IEEE International Conference on Automatica, Curico, Chile, 19–21 October 2016; pp. 1–6. [Google Scholar]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs LQ control techniques applied to an indoor micro quadrotor. In Proceeding of the International Conference on Intelligent Robots and Systems, Sendai, Japan, 28 September–2 October 2004; pp. 2451–2456. [Google Scholar]
- Argentim, L.M.; Rezende, W.C.; Santos, P.E.; Aguiar, R.A. PID, LQR and LQR-PID on a quadcopter platform. In Proceedings of the International Conference on Informatics, Electronics and Vision, Dhaka, Bangladesh, 17–18 May 2013; pp. 1–6. [Google Scholar]
- Li, S.; Li, B.; Geng, Q. Adaptive sliding mode control for quadrotor helicopters. In Proceeding of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 71–76. [Google Scholar]
- Nadda, S.; Swarup, A. On adaptive sliding mode control for improved quadrotor tracking. J. Vibr. Control 2018, 24, 3219–3230. [Google Scholar] [CrossRef]
- Binh, N.T.; Tung, N.A.; Nam, D.P.; Huong, N.T.V. Robust Adaptive Backstepping in Tracking Control for Wheeled Inverted Pendulum. In Information Systems Design and Intelligent Applications; Springer: Singapore, 2018; pp. 423–434. [Google Scholar]
- Binh, N.T.; Tung, N.A.; Nam, D.P.; Quang, N.H. An Adaptive Backstepping Trajectory Tracking Control of a Tractor Trailer Wheeled Mobile Robot. Int. J. Control Autom. Syst. 2019, 17, 465–473. [Google Scholar] [CrossRef]
- Madani, T.; Benallegue, A. Backstepping control for a quadrotor helicopter. In Proceeding of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3255–3260. [Google Scholar]
- Das, A.; Lewis, F.; Subbarao, K. Backstepping approach for controlling a quadrotor using lagrange form dynamics. J. Intell. Rob. Syst. 2009, 56, 127–151. [Google Scholar] [CrossRef]
- Ramirez-Rodriguez, H.; Parra-Vega, V.; Sanchez-Orta, A.; Garcia-Salazar, O. Robust backstepping control based on integral sliding modes for tracking of quadrotors. J. Intell. Rob. Syst. 2014, 73, 51–66. [Google Scholar] [CrossRef]
- Zuo, Z. Adaptive trajectory tracking control design with command filtered compensation for a quadrotor. J. Vibr. Control 2013, 19, 94–108. [Google Scholar] [CrossRef]
- Do, K.D. Path–tracking control of stochastic quadrotor aircraft in three–dimensional space. J. Dyn. Syst. Meas. Control 2015, 137, 101003. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P.V. Nonlinear and Adaptive Control Design; Wiley: New York, NY, USA, 1995. [Google Scholar]
- Alexis, K.; Nikolakopoulos, G.; Tzes, A. Model predictive quadrotor control: Attitude, altitude and position experimental studies. IET Control Theory Appl. 2012, 6, 1812–1827. [Google Scholar] [CrossRef]
- Ru, P.; Subbarao, K. Nonlinear model predictive control for unmanned aerial vehicles. Aerospace 2017, 4, 31. [Google Scholar] [CrossRef]
- Raffo, G.V.; Ortega, M.G.; Rubio, F.R. An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter. Automatica 2010, 46, 29–39. [Google Scholar] [CrossRef]
- Gong, X.; Hou, Z.C.; Zhao, C.J.; Bai, Y.; Tian, Y.T. Adaptive backstepping sliding mode trajectory tracking control for a quad-rotor. Int. J. Autom. Comput. 2012, 9, 555–560. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S. Adaptive sliding mode control for finite-time stability of quad-rotor UAVs with parametric uncertainties. ISA Trans. 2018, 72, 1–14. [Google Scholar] [CrossRef]
- Li, S.; Wang, Y.; Tan, J.; Zheng, Y. Adaptive RBFNNs/integral sliding mode control for a quadrotor aircraft. Neurocomputing 2016, 216, 126–134. [Google Scholar] [CrossRef]
- Boudjedir, H.; Bouhali, O.; Rizoug, N. Adaptive neural network control based on neural observer for quadrotor unmanned aerial vehicle. Adv. Rob. 2014, 28, 1151–1164. [Google Scholar] [CrossRef]
- Fei, J.; Lu, C. Adaptive sliding mode control of dynamic systems using double loop recurrent neural network structure. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 1275–1286. [Google Scholar] [CrossRef]
- Gao, H.; Liu, C.; Guo, D.; Liu, J. Fuzzy adaptive PD control for quadrotor helicopter. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 281–286. [Google Scholar]
- Nadda, S.; Swarup, A. Improved quadrotor altitude control design using second–order sliding mode. J. Aerosp. Eng. 2017, 30, 04017065. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: New York, NY, USA, 2002. [Google Scholar]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]
- Copter Attitude Control. Available online: http://ardupilot.org/dev/docs/apmcopter-programming-attitude-control-2.html (accessed on 12 September 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Unit |
|---|---|---|
| Mass of whole UAV | m | kg |
| Gravitational acceleration | g | m/s |
| Arm length | l | m |
| Thrust coefficient | b | N·s/rad |
| Drag coefficient | d | N·s/rad |
| Inertial moment about x-axis | kg·m | |
| Inertial moment about y-axis | kg·m | |
| Inertial moment about z-axis | kg·m | |
| Drag moment coefficient | s |
| Definition | Symbol | Unit |
|---|---|---|
| Position in Earth frame | m | |
| Position in Body frame | m | |
| Roll, Pitch, Yaw angles | rad | |
| Rotor speed | rad/s | |
| Thrust force | N |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, A.T.; Xuan-Mung, N.; Hong, S.-K. Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique. Appl. Sci. 2019, 9, 3873. https://doi.org/10.3390/app9183873
Nguyen AT, Xuan-Mung N, Hong S-K. Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique. Applied Sciences. 2019; 9(18):3873. https://doi.org/10.3390/app9183873
Chicago/Turabian StyleNguyen, Anh Tung, Nguyen Xuan-Mung, and Sung-Kyung Hong. 2019. "Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique" Applied Sciences 9, no. 18: 3873. https://doi.org/10.3390/app9183873
APA StyleNguyen, A. T., Xuan-Mung, N., & Hong, S.-K. (2019). Quadcopter Adaptive Trajectory Tracking Control: A New Approach via Backstepping Technique. Applied Sciences, 9(18), 3873. https://doi.org/10.3390/app9183873