Coordination of Multiple Autonomous Agents Using Naturally Generated Languages in Task Planning


Abstract
1. Introduction
2. Related Work
3. Problem Formulation
3.1. Multi-Agent Planning Model
3.2. Assumptions
- Agents are cooperative so that they could carry out a task that cannot be done by a single agent, and they are rational and perform the task at the least cost;
- Observation and communication are only available before task execution, and agents perform the task synchronously at each step. All agents understand the constructed language.
3.3. Language Construction
4. Approach
4.1. Conditions
4.2. General Idea
4.3. Algorithm
| Algorithm 1 Language Generation Process |
|
4.4. Language Communication
5. Experiments and Results
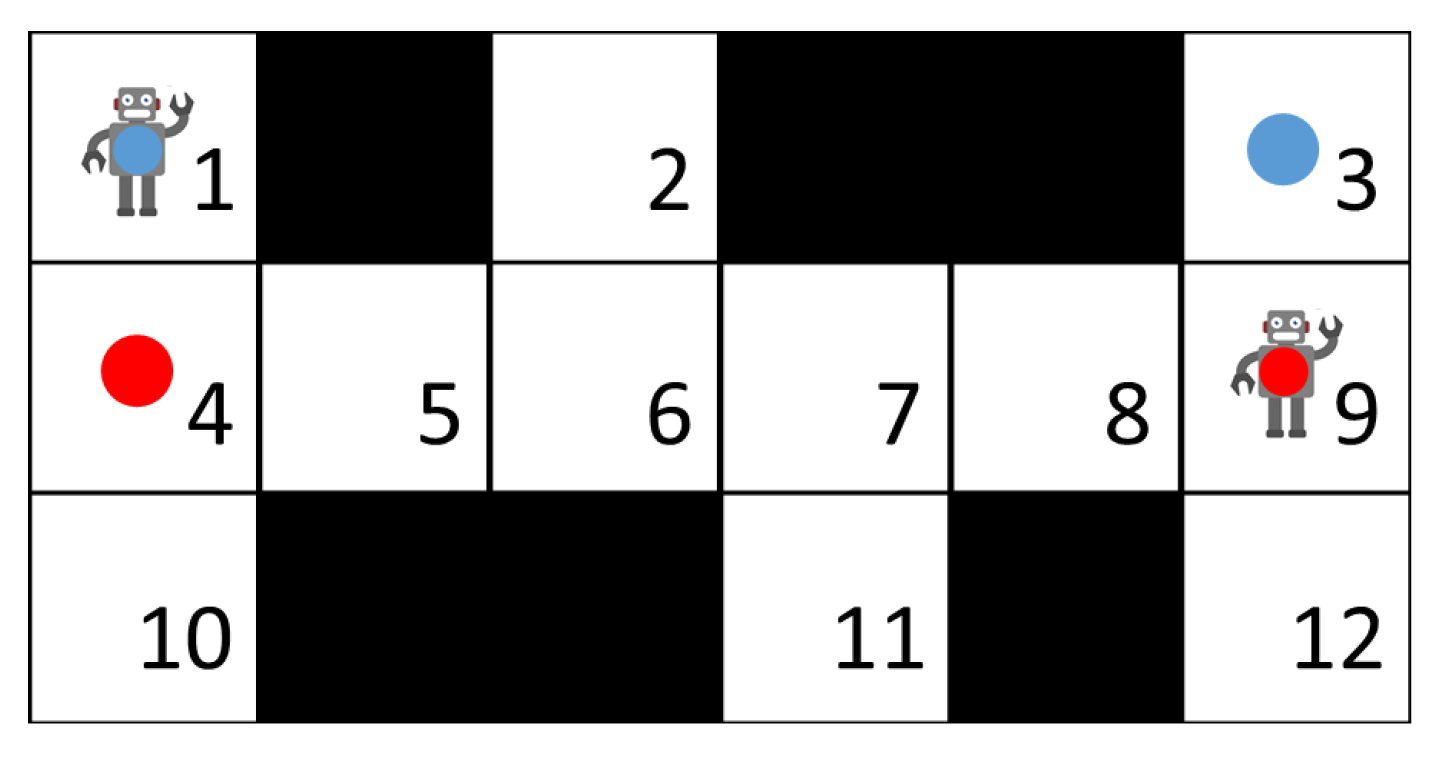
5.1. Coordination Example
5.2. Languages Comparison
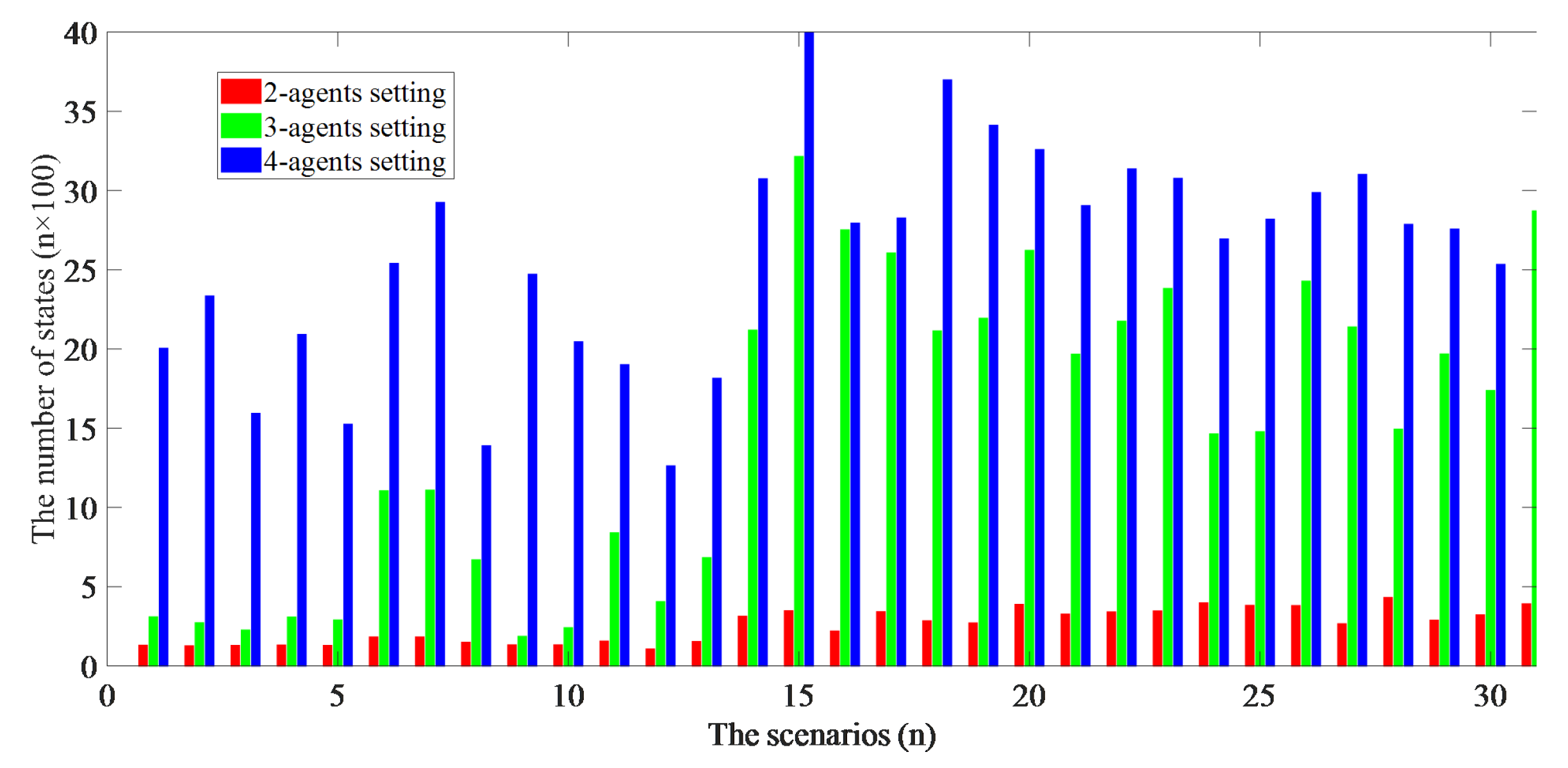
5.3. Different Scenarios
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| RC | Required Coordination |
| LGP | Language Generation Problem |
| SGP | Sentence Generation Problem |
| A | Actions |
| S | States |
| P | Plans |
| L | Languages |
| W | Words |
| B | Sentences |
| CGL | Complete Global Language |
| MOL | Minimal Optimal Language |
References
- Wooldridge, M. An Introduction to Multiagent Systems, 2nd ed.; Wiley: Torquay, UK, 2009. [Google Scholar]
- Farinelli, A.; Boscolo, N.; Zanotto, E.; Pagello, E. Advanced approaches for multi-robot coordination in logistic scenarios. Robot. Auton. Syst. 2017, 90, 34–44. [Google Scholar] [CrossRef]
- Werfel, J.; Petersen, K.; Nagpal, R. Designing collective behavior in a termite-inspired robot construction team. Science 2014, 343, 754–758. [Google Scholar] [CrossRef] [PubMed]
- Bernard, M.; Kondak, K.; Maza, I.; Ollero, A. Autonomous transportation and deployment with aerial robots for search and rescue missions. J. Field Robot. 2011, 28, 914–931. [Google Scholar] [CrossRef]
- Wurman, P.R.; D’Andrea, R.; Mountz, M. Coordinating hundreds of cooperative, autonomous vehicles in warehouses. AI Mag. 2008, 29, 9–20. [Google Scholar]
- Jordán, J.; Palanca, J.; Val, E.D.; Julian, V.; Botti, V. A multi-agent system for the dynamic emplacement of electric vehicle charging stations. Appl. Sci. 2018, 8, 313. [Google Scholar] [CrossRef]
- Reynolds, C.W. Interaction with a group of autonomous characters. In Proceedings of the Game Developers Conference, San Jose, CA, USA, 15–19 March 2000; pp. 449–460. [Google Scholar]
- Dong, X.; Yu, B.; Shi, Z.; Zhong, Y. Time-varying formation control for unmanned aerial vehicles: Theories and applications. IEEE Trans. Control Syst. Technol. 2015, 23, 340–348. [Google Scholar] [CrossRef]
- Torreño, A.; Onaindia, E.; Sapena, O. FMAP: Distributed cooperative multi-agent planning. Appl. Intell. 2014, 41, 606–626. [Google Scholar] [CrossRef]
- Tellex, S.; Knepper, R.; Li, A.; Rus, D.; Roy, N. Asking for help using inverse semantics. In Proceedings of the RSS, Rome, Italy, 13–17 July 2014. [Google Scholar]
- Gong, Z.; Zhang, Y. Temporal spatial inverse semantics for robots communicating with humans. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 4451–4458. [Google Scholar]
- Almeida, J.D.; Nakashima, R.T.; Neves, F., Jr.; Valéria, L.; de Arruda, R. Bio-inspired on-line path planner for cooperative exploration of unknown environment by a Multi-Robot System. Robot. Auton. Syst. 2019, 112, 32–48. [Google Scholar] [CrossRef]
- Parker, L.E. Multiple mobile robot systems. In Springer Handbook of Robotics; Springer: Berlin, Germany, 2016; pp. 921–941. [Google Scholar]
- Cabri, G.; Leonardi, L.; Zambonelli, F. Mobile-agent coordination models for internet applications. Computer 2000, 33, 82–89. [Google Scholar] [CrossRef]
- Goldman, C.V.; Zilberstein, S. Decentralized Control of Cooperative Systems: Categorization and Complexity Analysis. arXiv 2011, arXiv:1107.0047. [Google Scholar] [CrossRef]
- Goldman, C.V.; Allen, M.; Zilberstein, S. Learning to communicate in a decentralized environment. Auton. Agents Multi-Agent Syst. 2007, 15, 47–90. [Google Scholar] [CrossRef]
- Wu, F.; Zilberstein, S.; Chen, X. Online planning for multi-agent systems with bounded communication. Artif. Intell. 2011, 175, 487–511. [Google Scholar] [CrossRef]
- Roth, M.; Simmons, R.G.; Veloso, M.M. Reasoning about joint beliefs for execution-time communication decisions. In Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent Systems, Utrecht, The Netherlands, 25–29 July 2005; pp. 786–793. [Google Scholar]
- Sukhbaatar, S.; Fergus, R. Learning multiagent communication with backpropagation. Proc. NIPS 2016, 2244–2252. [Google Scholar]
- Soon, G.K.; On, C.K.; Anthony, P.; Hamdan, A.R. A review on agent communication language. In Computational Science and Technology; Springer: Singapore, 2019; pp. 481–491. [Google Scholar]
- Sadek, M.D.; Bretier, P.; Panaget, F. ARTIMIS: Natural dialogue meets rational agency. In Proceedings of the IJCAI, Nagoya, Japan, 23–29 August 1997; pp. 1030–1035. [Google Scholar]
- Finin, T.; Fritzson, R.; McKay, D.; McEntire, R. KQML as an agent communication language. In Proceedings of the Third International Conference on Information and Knowledge Management, Gaithersburg, MD, USA, 29 November–2 December 1994; pp. 456–463. [Google Scholar]
- Nowzari, C.; Garcia, E.; Cortés, G. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1–27. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Rybski, P.E.; Yoon, K.; Stolarz, J.; Veloso, M.M. Interactive robot task training through dialog and demonstration. In Proceedings of the 2007 2nd ACM/IEEE International Conference on Human-Robot Interaction (HRI), Arlington, VA, USA, 9–11 March 2007; pp. 49–56. [Google Scholar]
- Chai, J.Y.; Gao, Q.; She, L.; Yang, S.; Saba-Sadiya, S.; Xu, G. Language to action: Towards interactive task learning with physical agents. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; pp. 2–9. [Google Scholar]
- Paul, R.; Arkin, J.; Roy, N.; Howard, T.M. Efficient grounding of abstract spatial concepts for natural language interaction with robot manipulators. In Proceedings of the 2016 Robotics: Science and Systems, Ann Arbor, MI, USA, 18–22 June 2016. [Google Scholar]
- Fang, R.; Doering, M.; Chai, J.Y. Collaborative models for referring expression generation in situated dialogue. In Proceedings of the AAAI Conference on Artificial Intelligence 2014, Québec City, QC, Canada, 27–31 July 2014; pp. 1544–1550. [Google Scholar]
- Steels, L. Evolving grounded communication for robots. Trends. Cogn. Sci. 2003, 7, 308–312. [Google Scholar] [CrossRef]
- Spike, M.; Stadle, K.; Kirby, S.; Smith, K. Minimal requirements for the emergence of learned signaling. Cognit. Sci. 2017, 41, 623–658. [Google Scholar] [CrossRef] [PubMed]
- Lazaridou, A.; Peysakhovich, A.; Baroni, M. Multi-agent cooperation and the emergence of (natural) language. arXiv 2016, arXiv:1612.07182. [Google Scholar]
- Steels, L. The Talking Heads Experiment: Origins of Words and Meanings; Language Science Press: Berlin, Germany, 2015. [Google Scholar]
- Steedman, M. Plans, affordances, and combinatory grammar. Linguist. Philos. 2002, 25, 723–753. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L. From abstractions to “natural languages” for planning agents. arXiv 2019, arXiv:1905.00517. [Google Scholar]
- Wang, L.; Guo, Q. Generating the minimal optimal language for cooperative agents. IEEE Access 2019, 7, 60348–60358. [Google Scholar] [CrossRef]
- Fikes, R.E.; Nilsson, N.J. Strips: A new approach to the application of theorem proving to problem solving. Artif. Intell. 1971, 2, 189–208. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Ng, R.; Han, J. Clarans: A method for clustering objects for spatial data mining. IEEE Trans. Knowl. Data Eng. 2002, 14, 1003–1016. [Google Scholar] [CrossRef]
- Ghallab, M.; Nau, D.; Traverso, P. Automated Planning and Acting; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Bylander, T. The computational complexity of propositional STRIPS planning. Artif. Intell. 1994, 69, 165–204. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Words in L | The States in W |
|---|---|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Guo, Q. Coordination of Multiple Autonomous Agents Using Naturally Generated Languages in Task Planning. Appl. Sci. 2019, 9, 3571. https://doi.org/10.3390/app9173571
Wang L, Guo Q. Coordination of Multiple Autonomous Agents Using Naturally Generated Languages in Task Planning. Applied Sciences. 2019; 9(17):3571. https://doi.org/10.3390/app9173571
Chicago/Turabian StyleWang, Li, and Qiao Guo. 2019. "Coordination of Multiple Autonomous Agents Using Naturally Generated Languages in Task Planning" Applied Sciences 9, no. 17: 3571. https://doi.org/10.3390/app9173571
APA StyleWang, L., & Guo, Q. (2019). Coordination of Multiple Autonomous Agents Using Naturally Generated Languages in Task Planning. Applied Sciences, 9(17), 3571. https://doi.org/10.3390/app9173571