An Integrated Cognitive Radio Network for Coastal Smart Cities


Abstract
1. Introduction
- An integrated coastal smart city is designed in which a user is able to fulfill the service demands from different applications in less response time. This concept of integration also enables different users from different applications to be served at the same time.
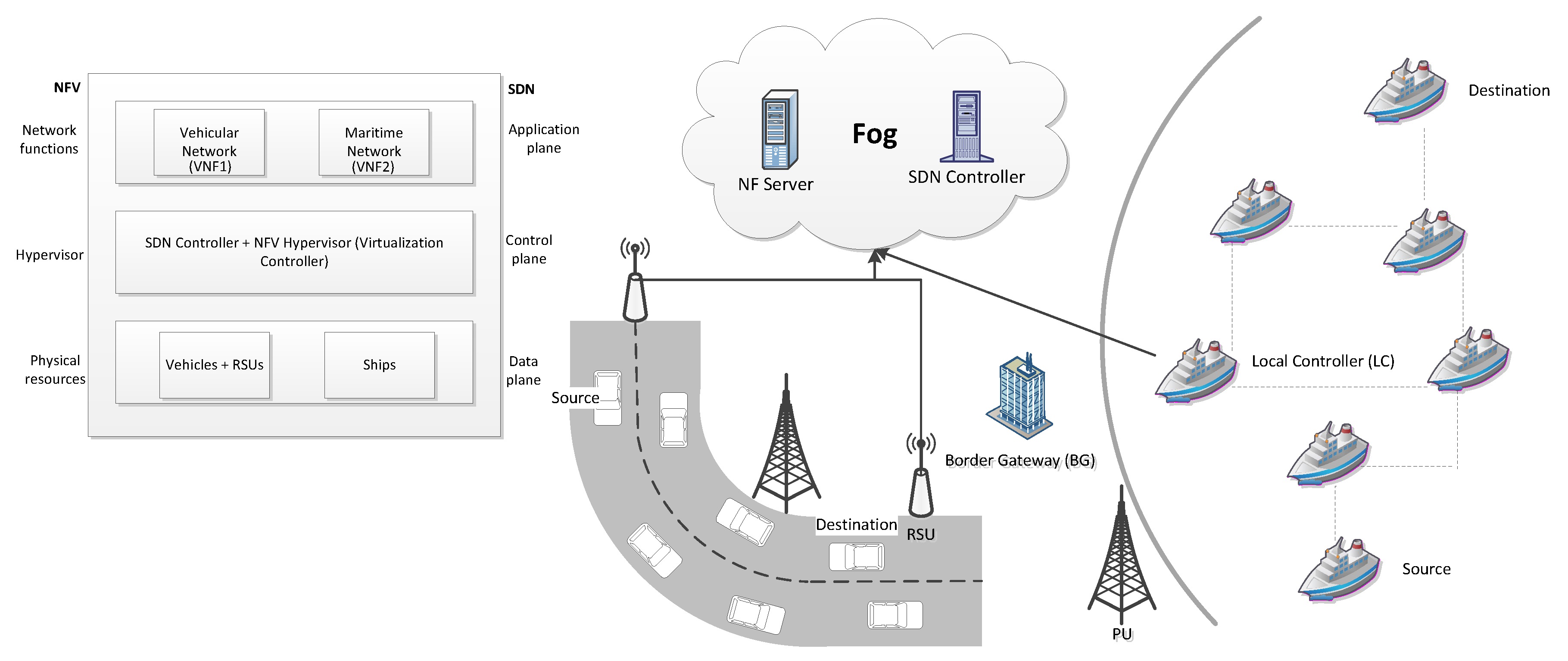
- We provide hybrid, as well as pure communications between the vehicular and maritime networks by using an integration of SDN, NFV, and FC.
- To alleviate the issues of spectrum scarcity for both automobile and maritime communications, we also consider the concept of cognitive technology to maintain stable networking.
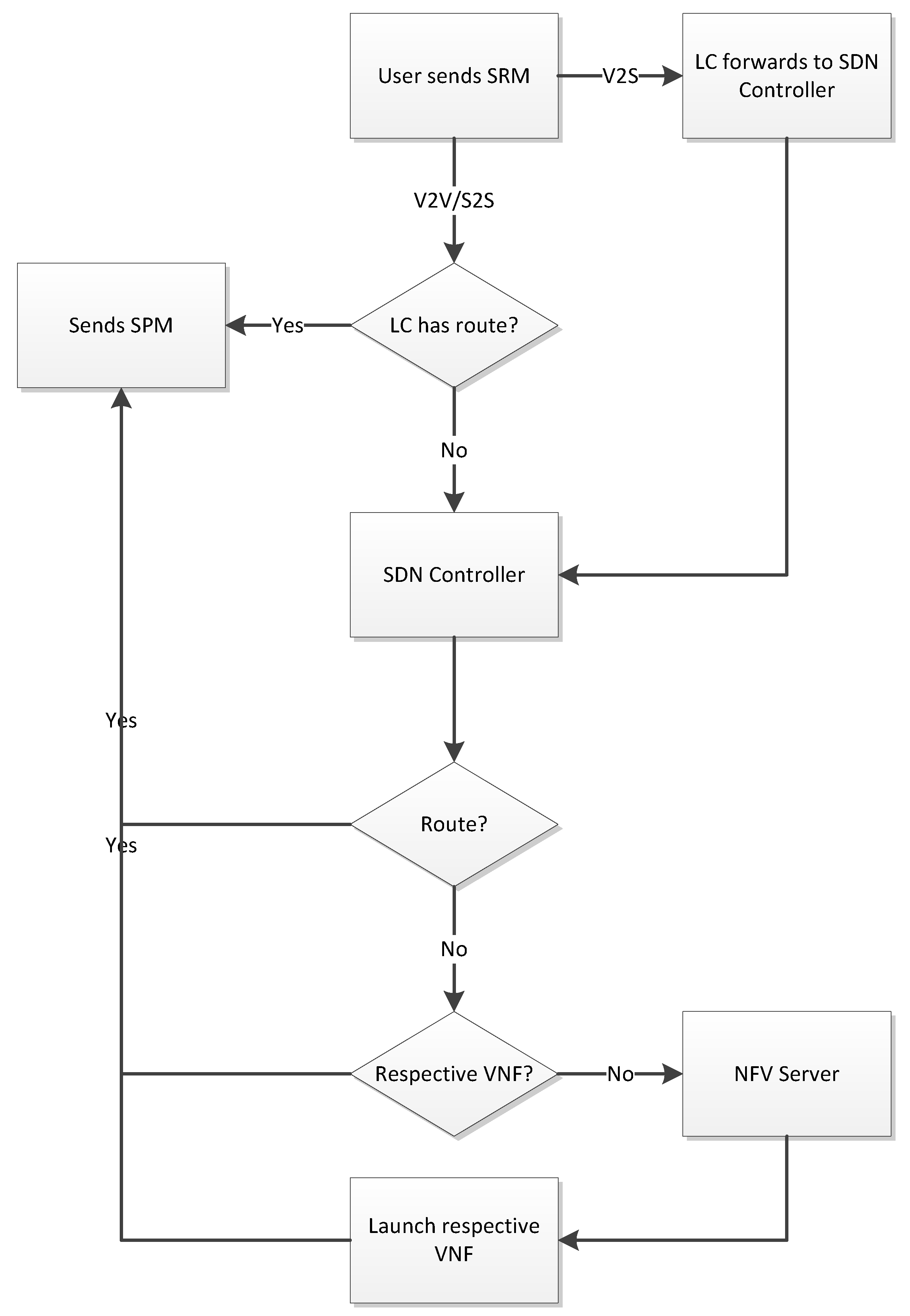
2. Integrated Cognitive Hybrid Communications for a Coastal City
Belief Propagation-Based Channel Selection Algorithm
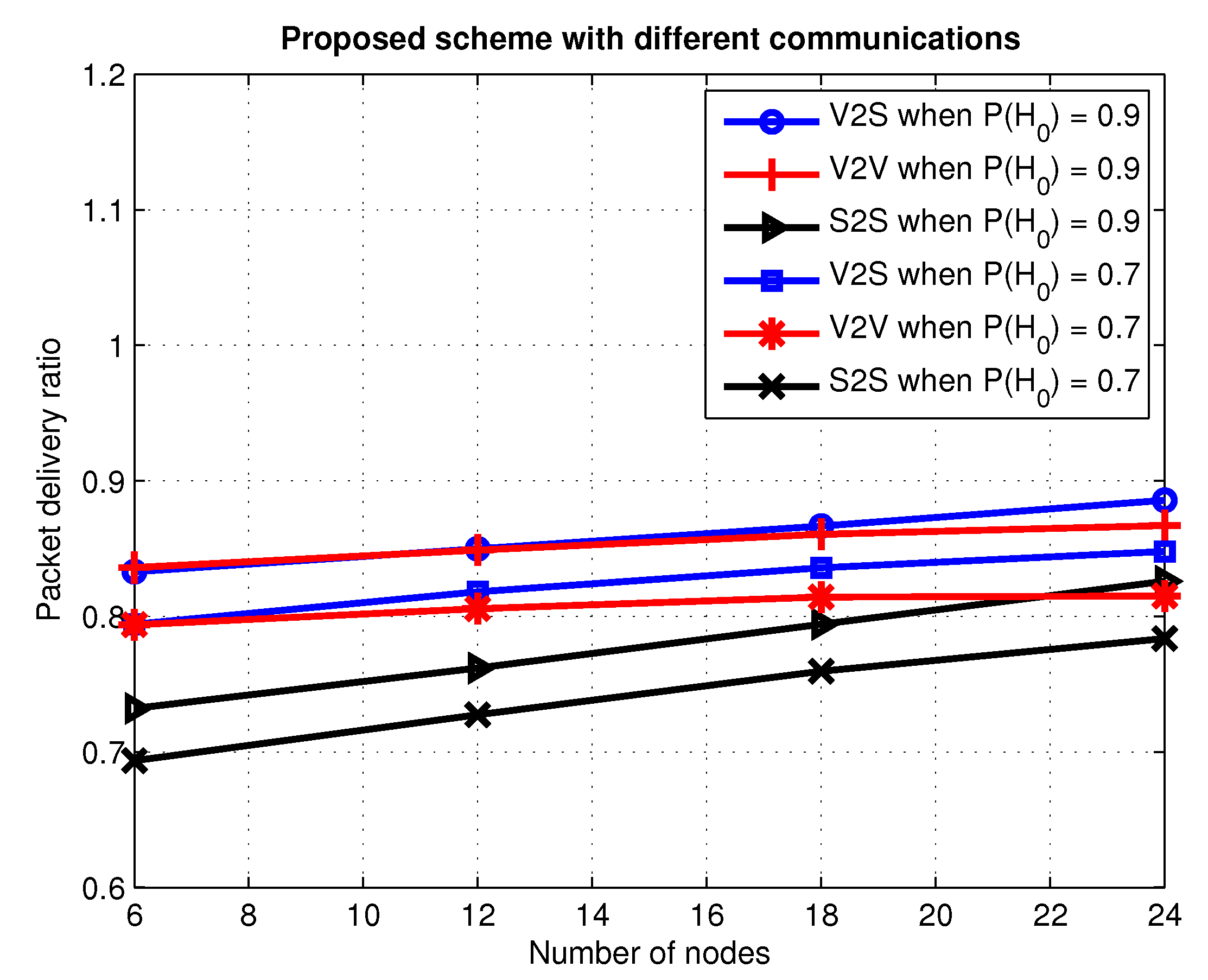
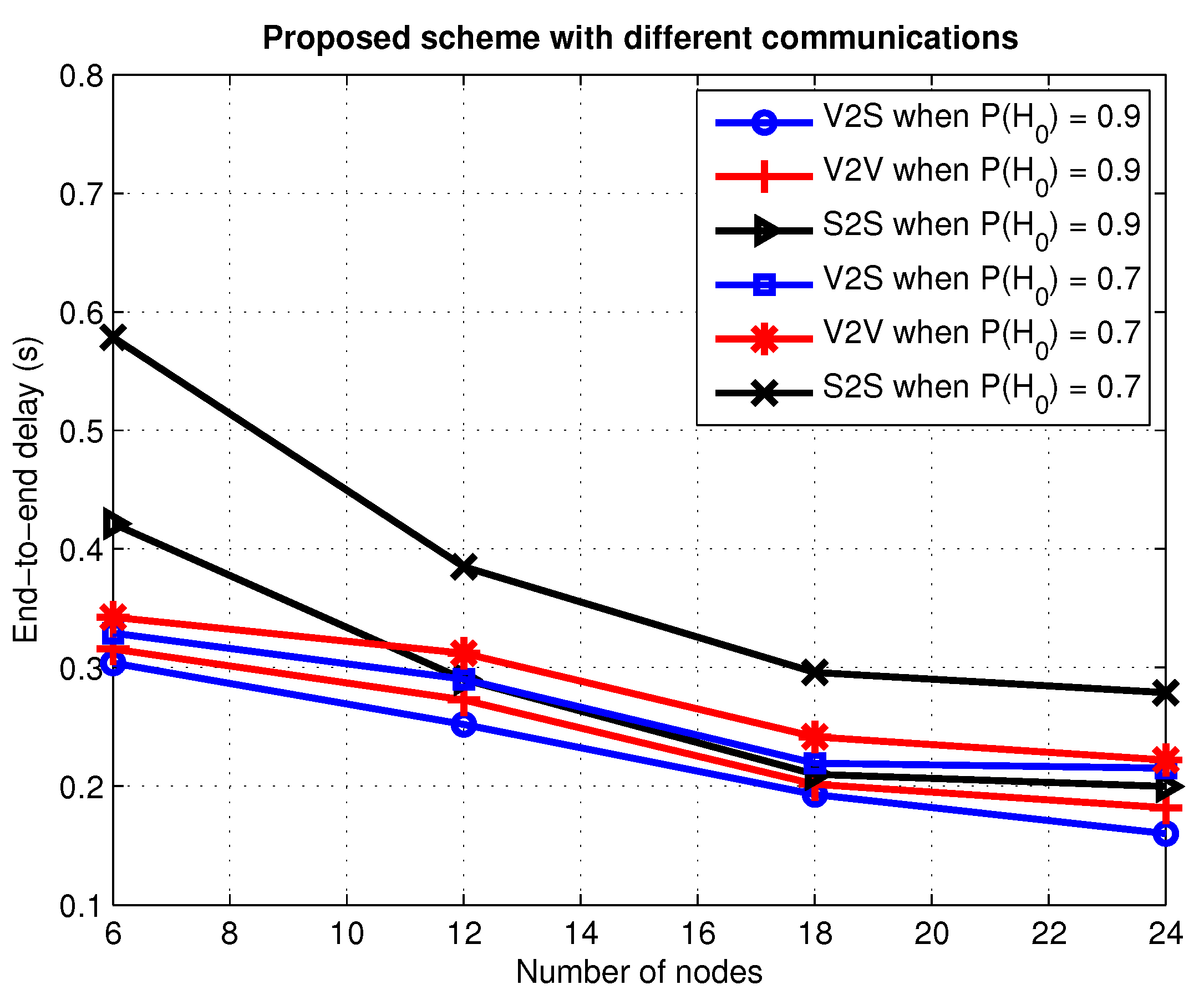
3. Simulation Results and Discussion
- packet delivery ratio
- end-to-end delay
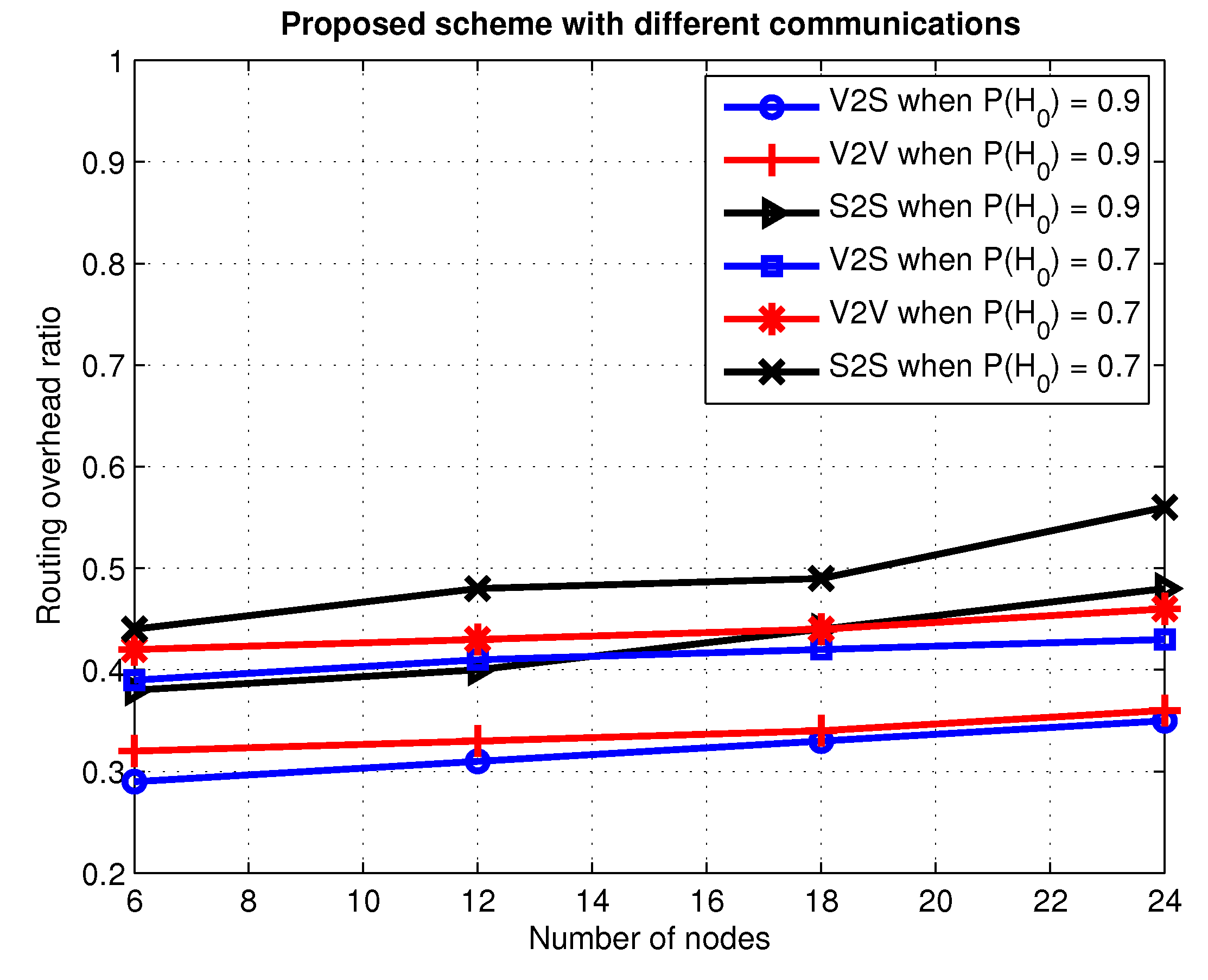
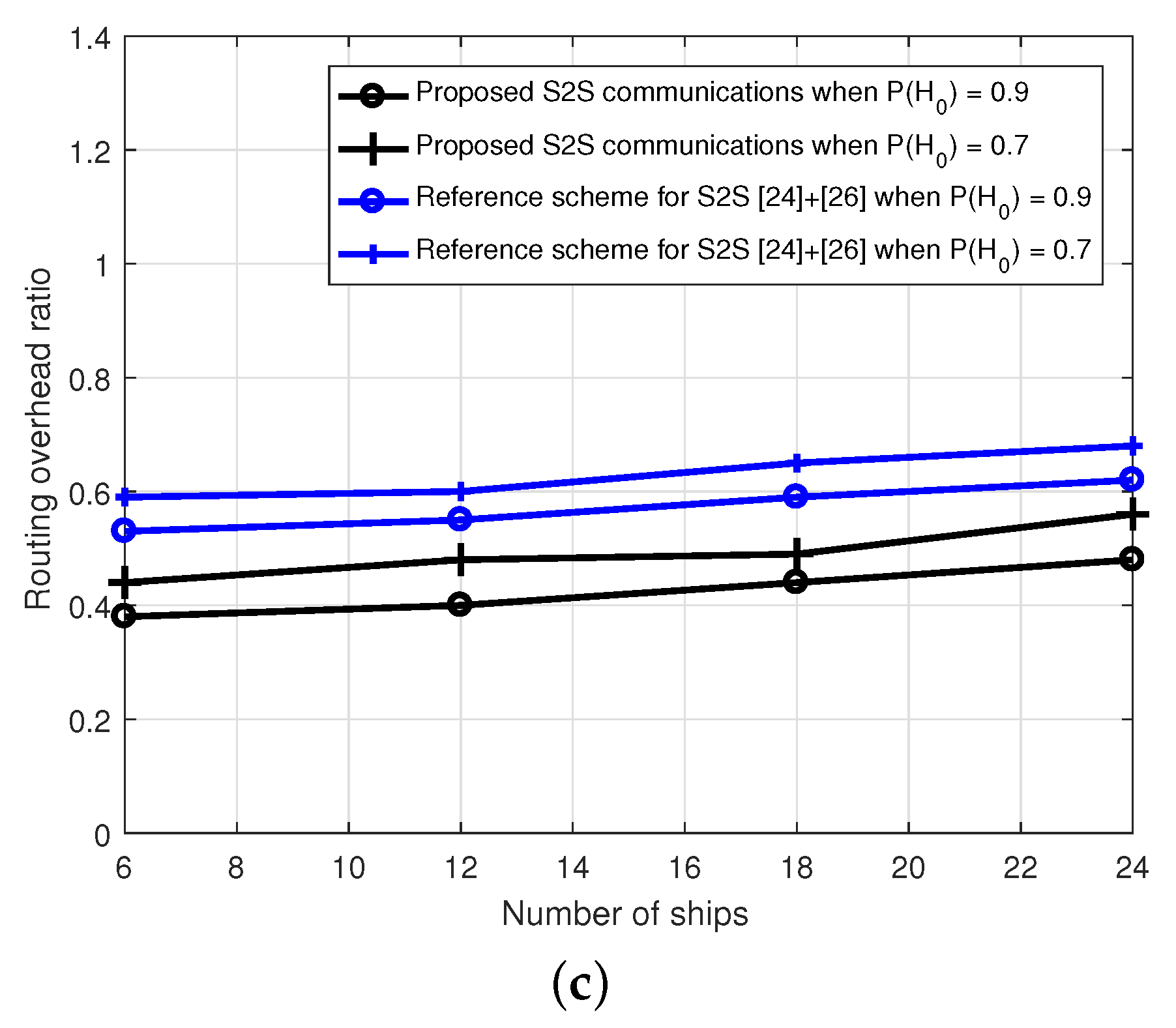
- routing overhead ratio
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baktir, A.C.; Ozgovde, A.; Ersoy, C. How can Edge Computing Benefit from Software-Defined Networking: A Survey, Use Cases, and Future Directions. IEEE Commun. Surv. Tutor. 2017, 19, 2359–2391. [Google Scholar] [CrossRef]
- Bu, C.; Wang, X.; Cheng, H.; Huang, M.; Li, K.; Das, S.K. Enabling Adaptive Routing Service Customization via the integration of SDN and NFV. J. Netw. Comput. Appl. 2017, 93, 123–136. [Google Scholar] [CrossRef]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the VTC Spring 2008-IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar]
- Zhou, M.-T.; Hoang, V.; Harada, H.; Pathmasuntharam, J.S.; Wang, H.; Kong, P.Y.; Ang, C.W.; Ge, Y.; Wen, S. TRITON: High-speed maritime wireless mesh network. IEEE Wirel. Commun. 2013, 20, 134–142. [Google Scholar] [CrossRef]
- Bonfim, M.S.; Dias, K.L.; Fernandes, S.F.L. Integrated NFV/SDN Architectures: A Systematic Literature Review. arXiv 2018, arXiv:1801.01516. [Google Scholar] [CrossRef]
- Alcatel.Lucent. The Right SDN is Right for NFV, Strategic White Paper. September 2014.
- Pan, J.; Ma, L.; Ravindran, R.; TalebiFard, P. HomeCloud: An Edge Cloud Framework and Testbed for New Application Delivery. In Proceedings of the International Conf. on Telecommunications (ICT), Thessaloniki, Greece, 16–18 May 2016. [Google Scholar]
- Ying, H.; Yu, R.; Zhao, N.; Leung, V.C.M.; Yin, H. Software-Defined Networks with Mobile Edge Computing and Caching for Smart Cities: A Big Data Deep Reinforcement Learning Approach. IEEE Commun. Mag. 2017, 55, 31–37. [Google Scholar]
- Zhang, W.; Zhang, Z.; Chao, H.-C. Cooperative Fog Computing for Dealing with Big Data in the Internet of Vehicles: Architecture and Hierarchical Resource Management. IEEE Commun. Mag. 2017, 55, 60–67. [Google Scholar] [CrossRef]
- Yang, P.; Zhang, N.; Bi, Y.; Yu, L.; Shen, X. Catalyzing Cloud-Fog Interoperation in 5G Wireless Networks: An SDN Approach. IEEE Netw. 2017, 31, 14–20. [Google Scholar] [CrossRef]
- Feng, B.; Zhou, H.; Zhang, H.; Li, G.; Li, H.; Yu, S.; Chao, H.C. HetNet: A Flexible Architecture for Heterogeneous Satellite-Terrestrial Networks. IEEE Netw. 2017, 31, 86–92. [Google Scholar] [CrossRef]
- Wang, K.; Yin, H.; Quan, W.; Min, G. Enabling Collaborative Edge Computing for for Software Defined Vehicular Networks. IEEE Netw. 2018, 32, 112–117. [Google Scholar] [CrossRef]
- Liang, K.; Zhao, L.; Chu, X.; Chen, H.-H. An Integrated Architecture for Software Defined and Virtualized Radio Access Networks with Fog Computing. IEEE Netw. 2017, 31, 80–87. [Google Scholar] [CrossRef]
- Campolo, C.; Molinaro, A.; Iera, A.; Menichella, F. 5G Network Slicing for Vehicle-to-Everything Services. IEEE Wirel. Commun. 2017, 24, 38–45. [Google Scholar] [CrossRef]
- Hu, T.; Fei, Y. QELAR: A Machine-Learning-Based Adaptive Routing Protocol for Energy-Efficient and Lifetime Extended Underwater Sensor Networks. IEEE Trans. Mobile Comput. 2010, 9, 796–809. [Google Scholar]
- Ghafoor, H.; Koo, I. CR-SDVN: A Cognitive Routing Protocol for Software-Defined Vehicular Networks. IEEE Sens. J. 2018, 18, 1761–1772. [Google Scholar] [CrossRef]
- Ghafoor, H.; Koo, I. Infrastructure-aided hybrid routing in CR-VANETs using a Bayesian Model. Wirel. Netw. 2019, 25, 1711–1729. [Google Scholar] [CrossRef]
- Yedidia, J.S.; Freeman, W.T.; Weiss, Y. Understanding belief propagation and its generalizations. In Exploring Artificial Intelligence in the New Millennium; Lake-meyer, G., Nebel, B., Eds.; Morgan Kaufmann: San Francisco, CA, USA, 2001; pp. 2282–2312. [Google Scholar]
- Baraka, K.; Safatly, L.; Artail, H.; Ghandour, A.; Hajj, A.E. An infrastructure-aided cooperative spectrum sensing scheme for vehicular ad hoc networks. Ad Hoc Netw. 2015, 25, 197–212. [Google Scholar] [CrossRef]
- Yang, T.; Feng, H.; Yang, C.; Sun, Z.; Yang, J.; Sun, F.; Deng, R.; Su, Z. Cooperative Networking towards Maritime Cyber-Physical Systems. Int. J. Distrib. Sens. Netw. 2016, 12, 3906549. [Google Scholar] [CrossRef]
- Ghafoor, H.; Noh, Y.; Koo, I. Belief propagation-based cognitive routing in maritime ad hoc networks. Int. J. Distrib. Sens. Netw. 2016, 12, 7635206. [Google Scholar] [CrossRef]
- Pierson, W.J., Jr.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of SA Kitaigorodskii. J. Geophys. Res. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- ITimmins, J.; O’Young, S. Marine communications channel modeling using the finite-difference time domain method. IEEE Trans. Veh. Technol. 2009, 58, 2626–2637. [Google Scholar] [CrossRef]
- Correia, S.; Boukerche, A.; Meneguette, R.I. An Architecture for Hierarchical Software-Defined Vehicular Networks. IEEE Commun. Mag. 2017, 55, 80–86. [Google Scholar] [CrossRef]
- Abbassi, S.H.; Qureshi, I.M.; Abbasi, H.; Alyaie, B.R. History-based spectrum sensing in CR-VANETs. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 163. [Google Scholar] [CrossRef]
- Tang, C.; Kandeepan, S.; Hourani, A.; Munari, A.; Berioli, M. Spectrum sensing for cognitive maritime VHF networks. In Proceedings of the 2014 MTS/IEEE Taipei Conference: Oceans Regeneration, OCEANS′14, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| number of vehicles and ships, | between 6 and 24 |
| communication range of each | 200 m |
| speed of | up to 15 m/s |
| speed of marine LC | 10 m/s |
| number of channels, M | 5 |
| number of PUs | 2 |
| communication range of PU | 500 m |
| rate parameter of exponential on/off activity | 0.05 |
| number of RSUs | 2 |
| communication range of RSUs | 350 m |
| 0.7 | |
| 0.8 | |
| 0.9 | |
| 0 | |
| 1 | |
| wave height | between 1.83 ans 2.29 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghafoor, H.; Koo, I. An Integrated Cognitive Radio Network for Coastal Smart Cities. Appl. Sci. 2019, 9, 3557. https://doi.org/10.3390/app9173557
Ghafoor H, Koo I. An Integrated Cognitive Radio Network for Coastal Smart Cities. Applied Sciences. 2019; 9(17):3557. https://doi.org/10.3390/app9173557
Chicago/Turabian StyleGhafoor, Huma, and Insoo Koo. 2019. "An Integrated Cognitive Radio Network for Coastal Smart Cities" Applied Sciences 9, no. 17: 3557. https://doi.org/10.3390/app9173557
APA StyleGhafoor, H., & Koo, I. (2019). An Integrated Cognitive Radio Network for Coastal Smart Cities. Applied Sciences, 9(17), 3557. https://doi.org/10.3390/app9173557