Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters



Abstract
1. Introduction
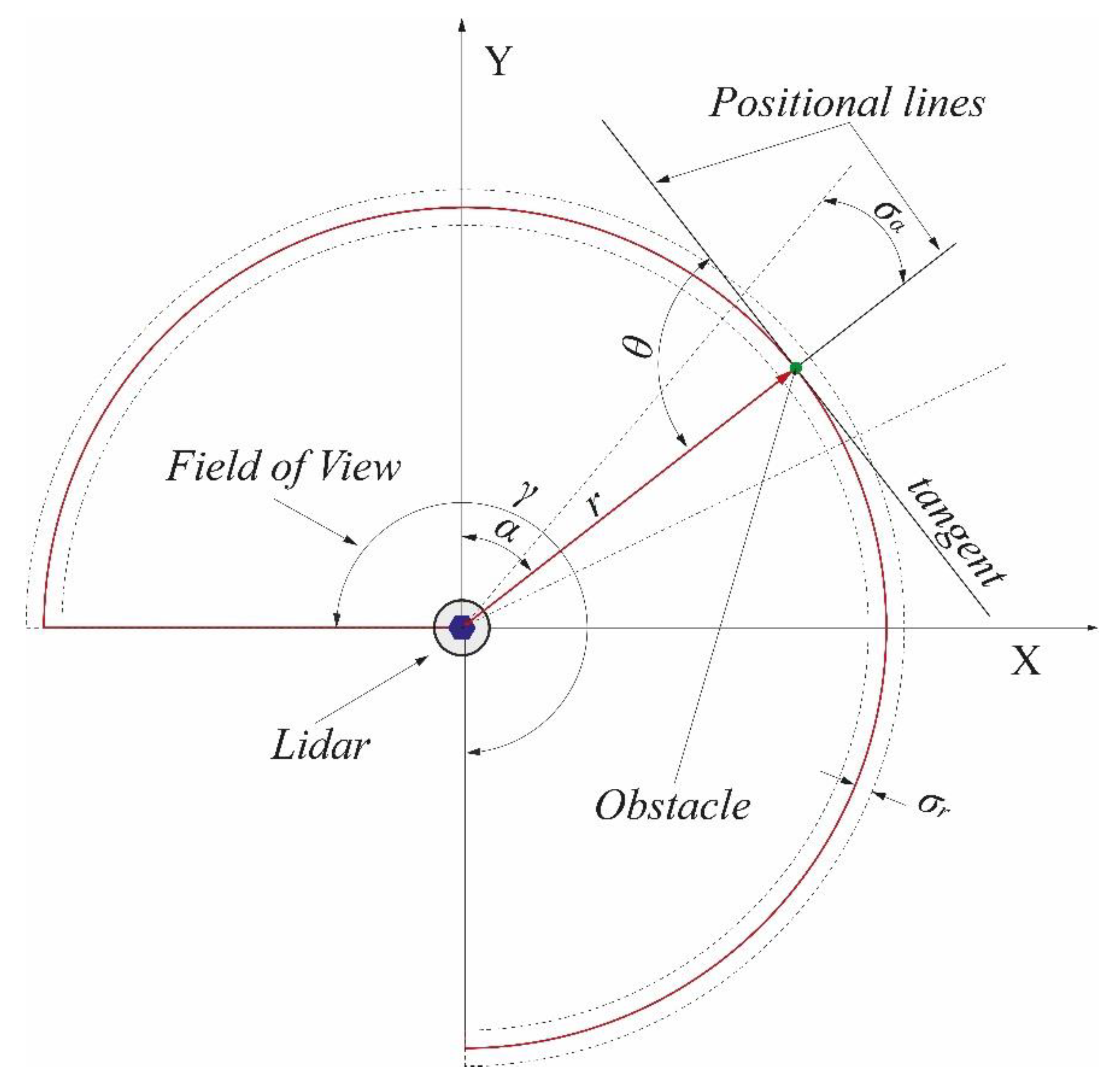
2. Evaluation of the Accuracy of Determining the Coordinates of a Position Using LIDAR
2.1. The Determination of USV Movement Parameters Using the Scan-Matching Method
- Selection (selection of points which are suitable for the alignment);
- Matching (matching points from model cloud to reference points cloud);
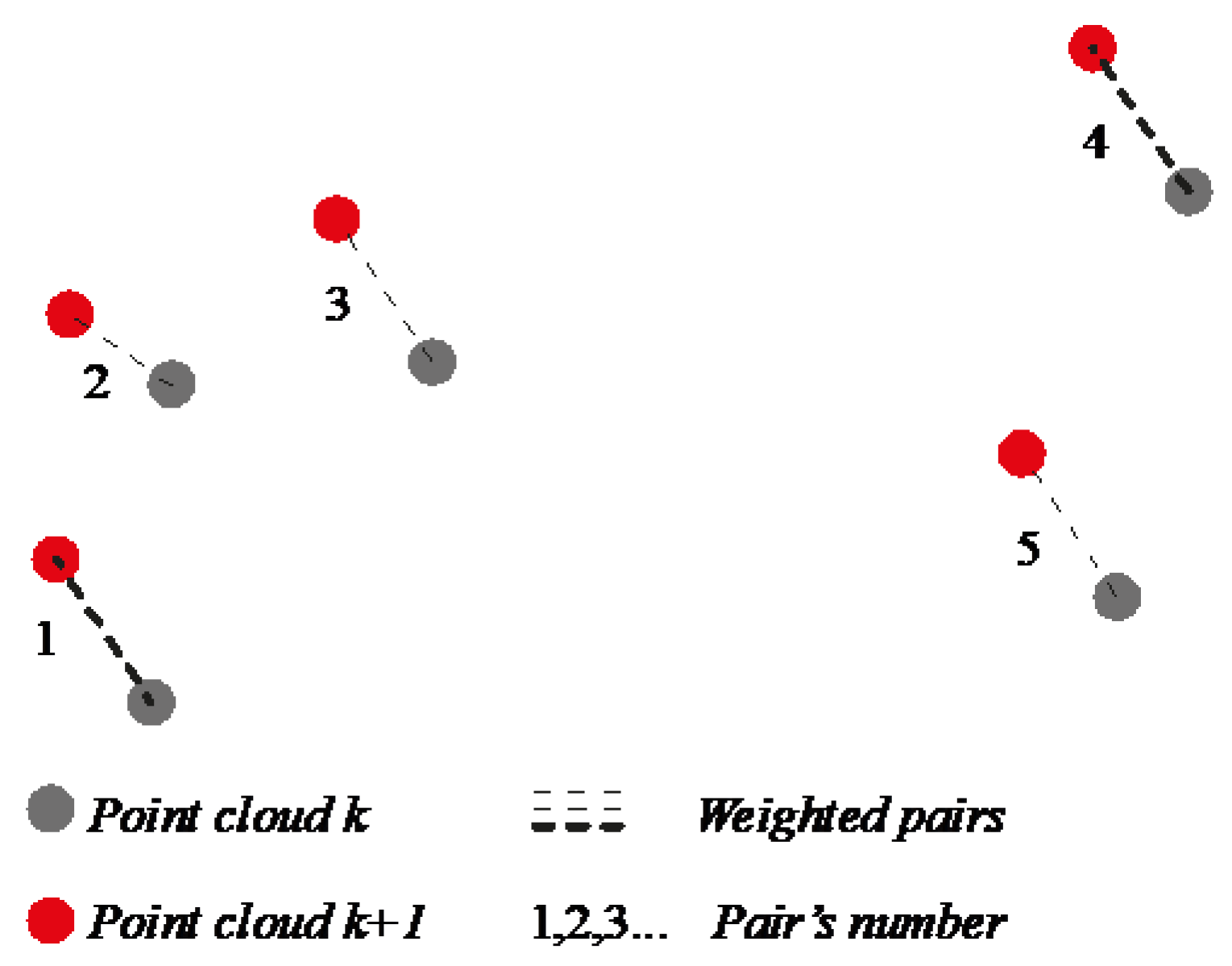
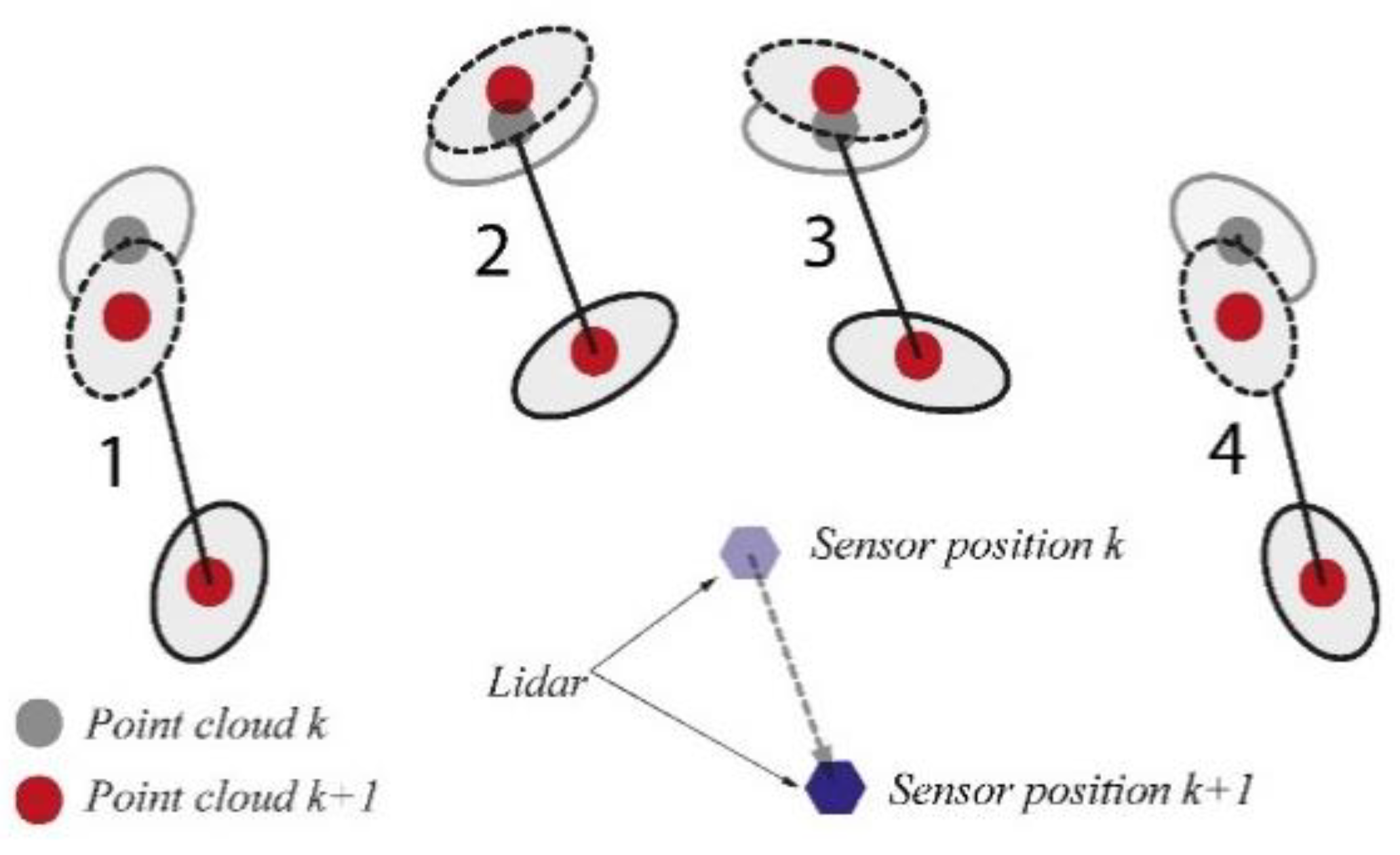
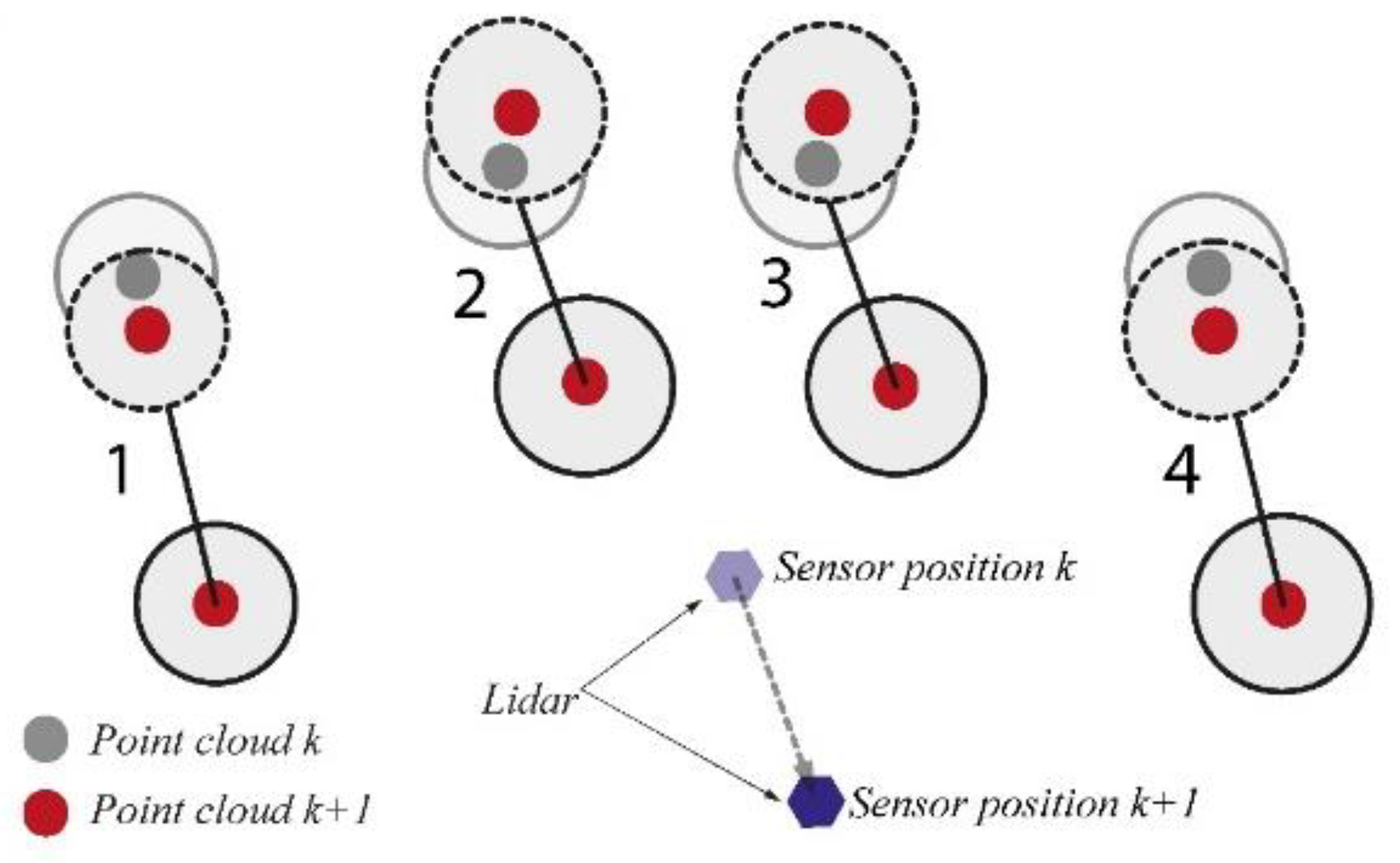
- Weighting (giving weight to corresponding points);
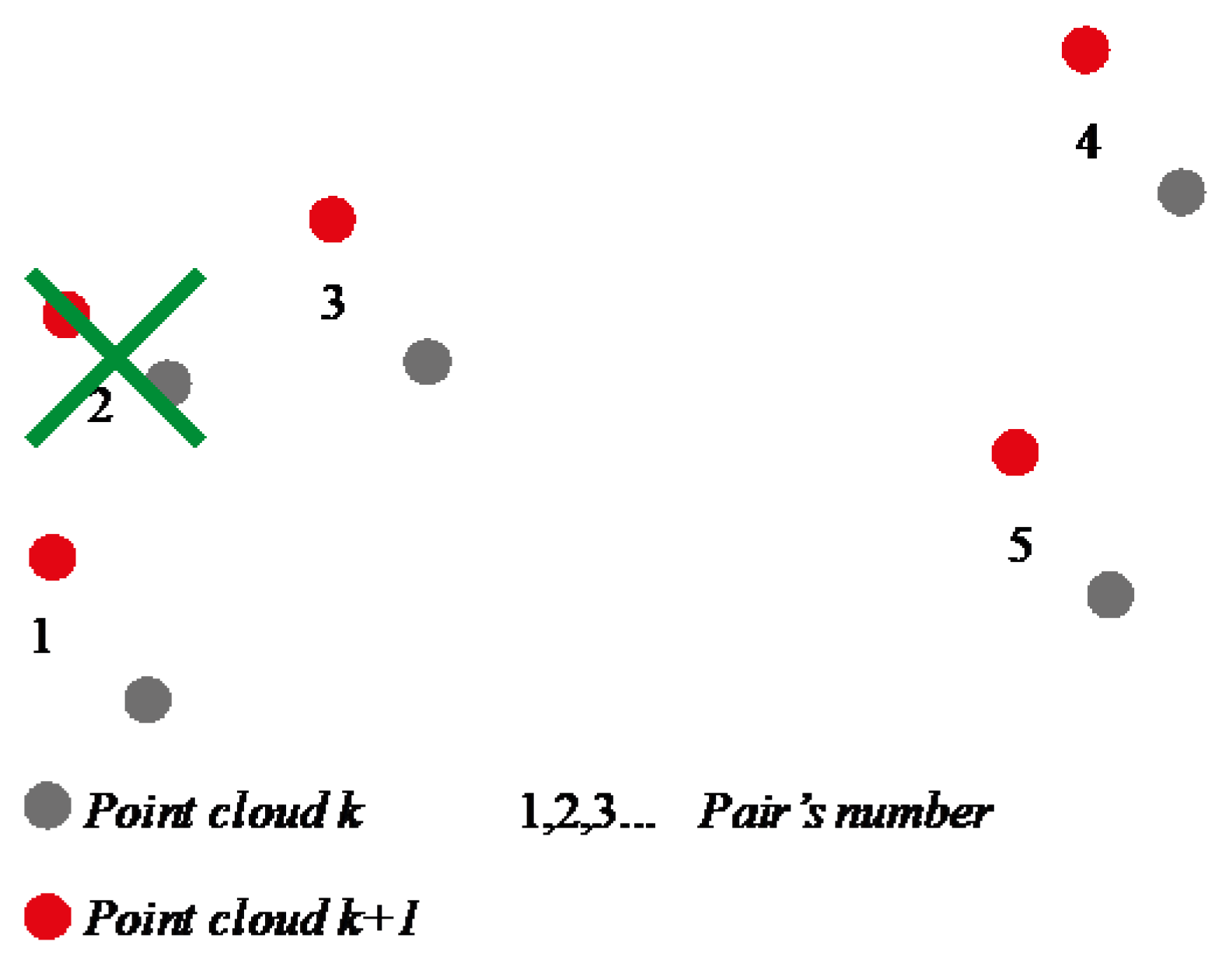
- Rejecting (deleting some points based on the robust criterion function);
- Assigning an error metric (choosing point-to-point, point-to-line, point-to-plane or plane-to-plane error metric);
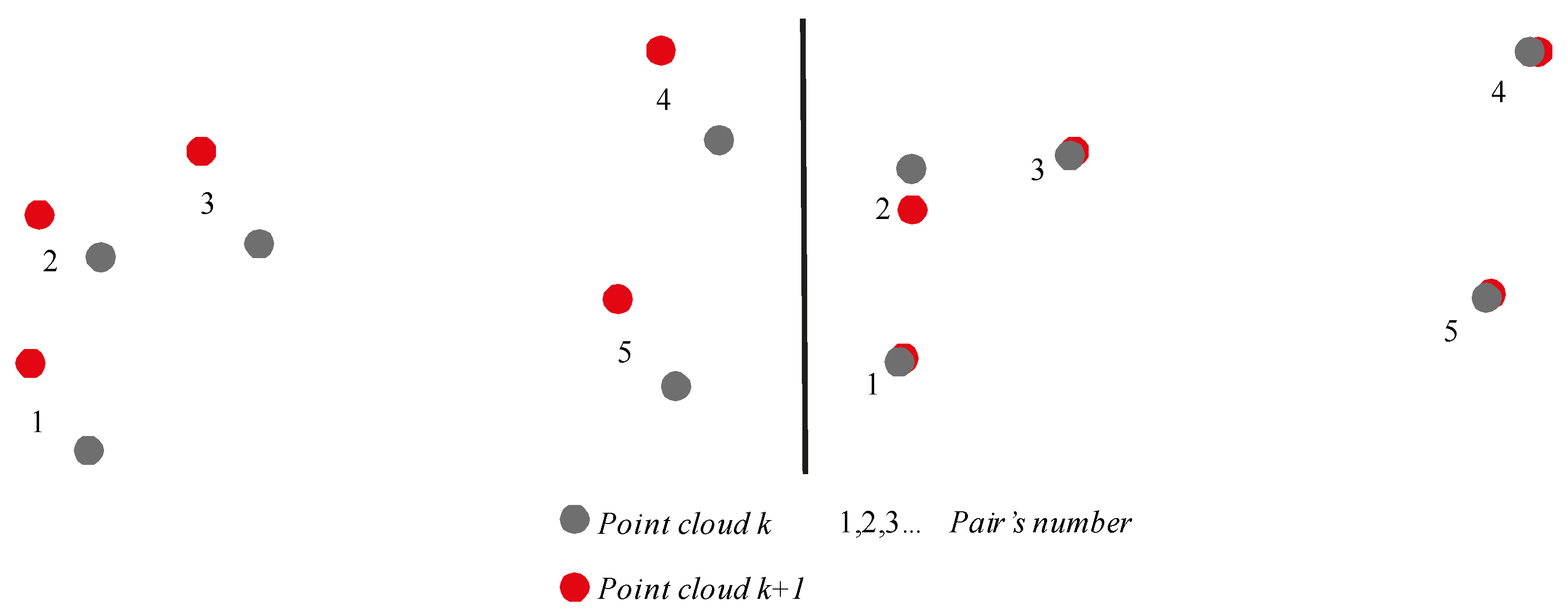
- Minimizing the metric between selected points.
2.2. Weighted Matching Point Clouds Using the Mean Direction Error
| Algorithm 1 The weighted ICP |
 |
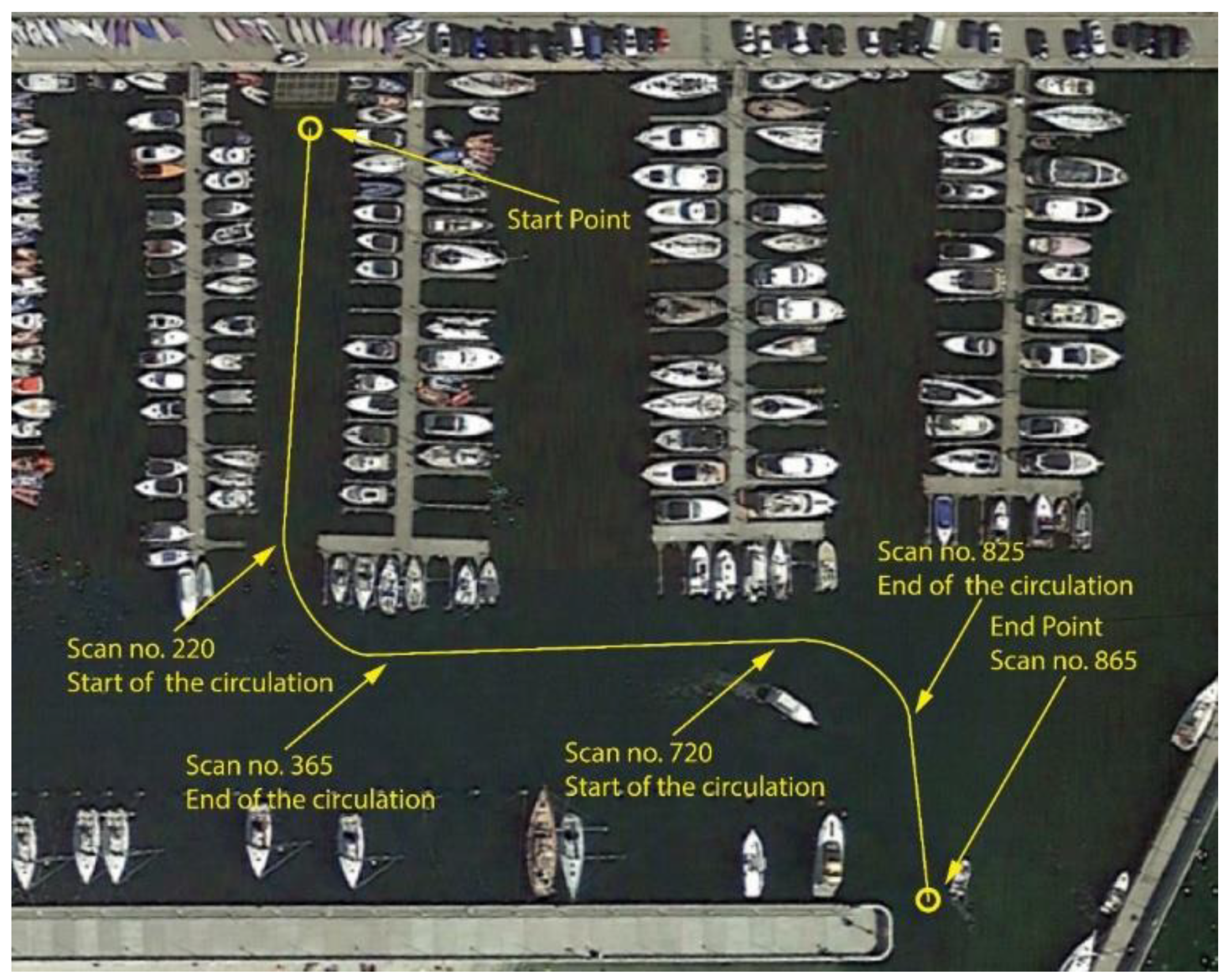
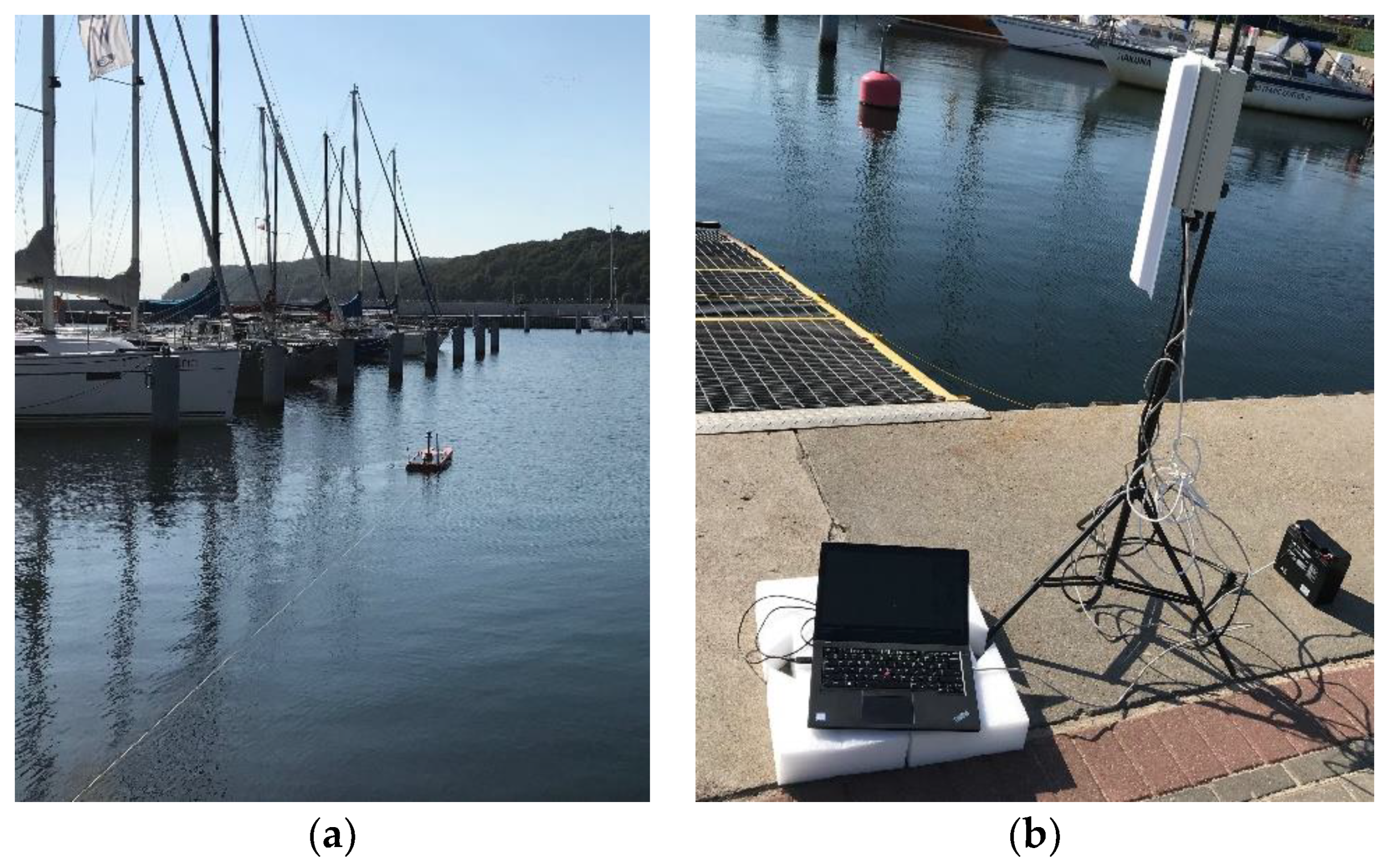
3. The Study and the Analysis of the Obtained Results
- measurements carried out using LIDAR and a GNSS RTK receiver, and the synchronous recording of their results,
- the determination of the HDG, SOG and ROT, based on LIDAR measurement results, by the scan-matching method using both classic and modified versions of the ICP algorithm,
- an analysis comparing the HDG, SOG, and ROT with reference results of GNSS RTK measurements, based on the accuracy criterion.
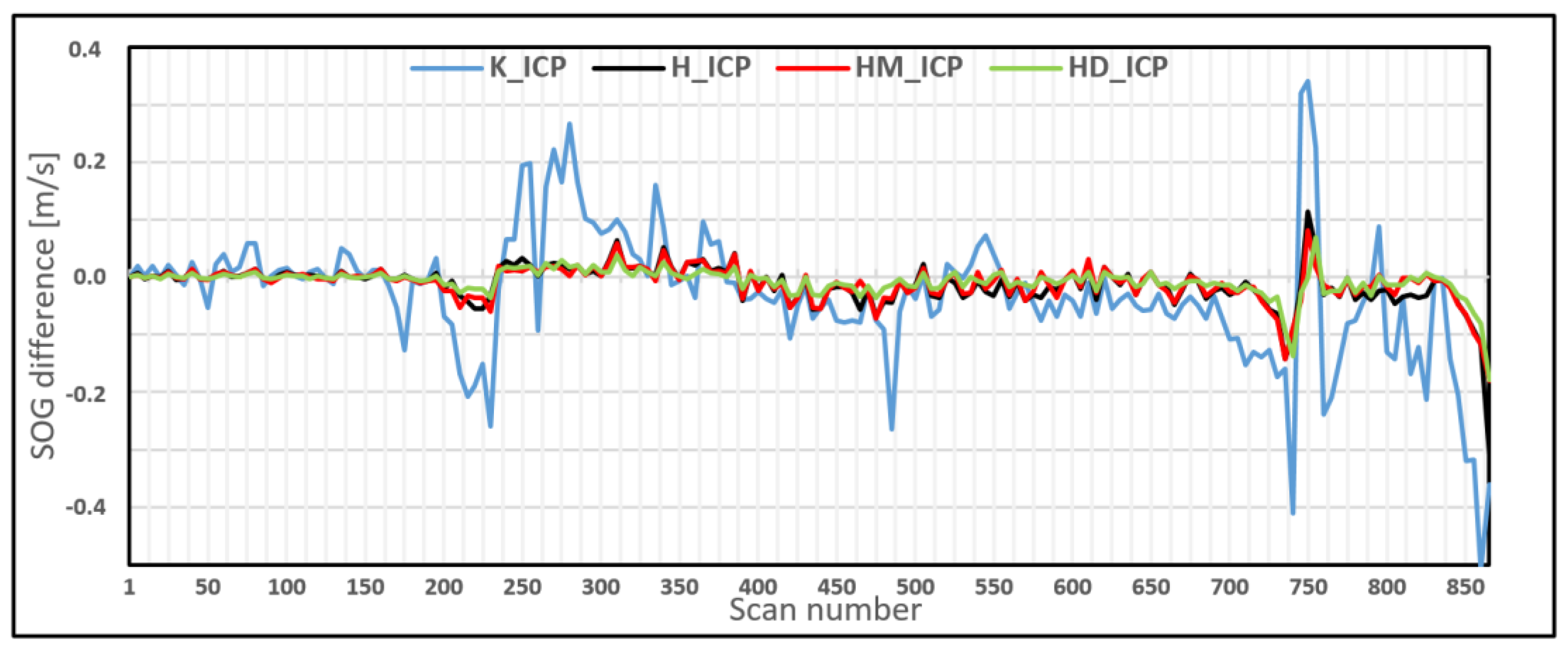
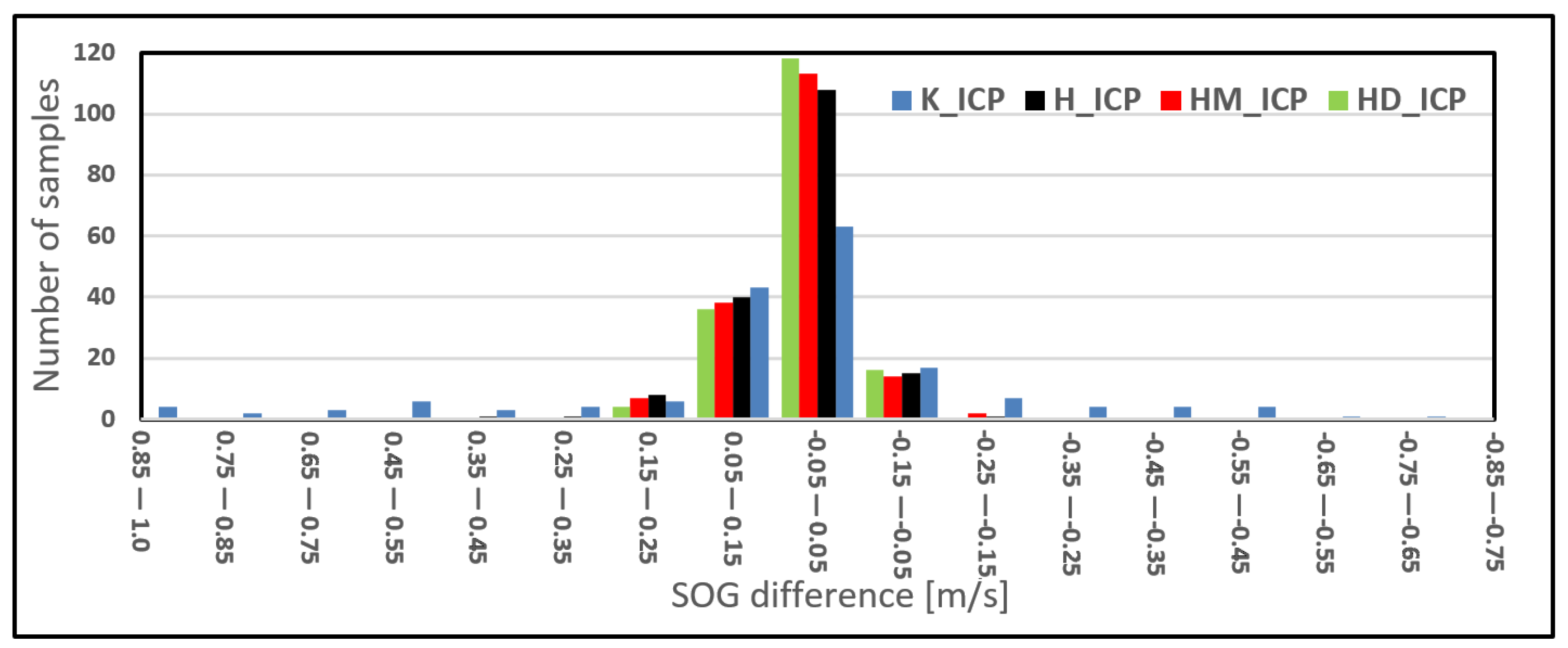
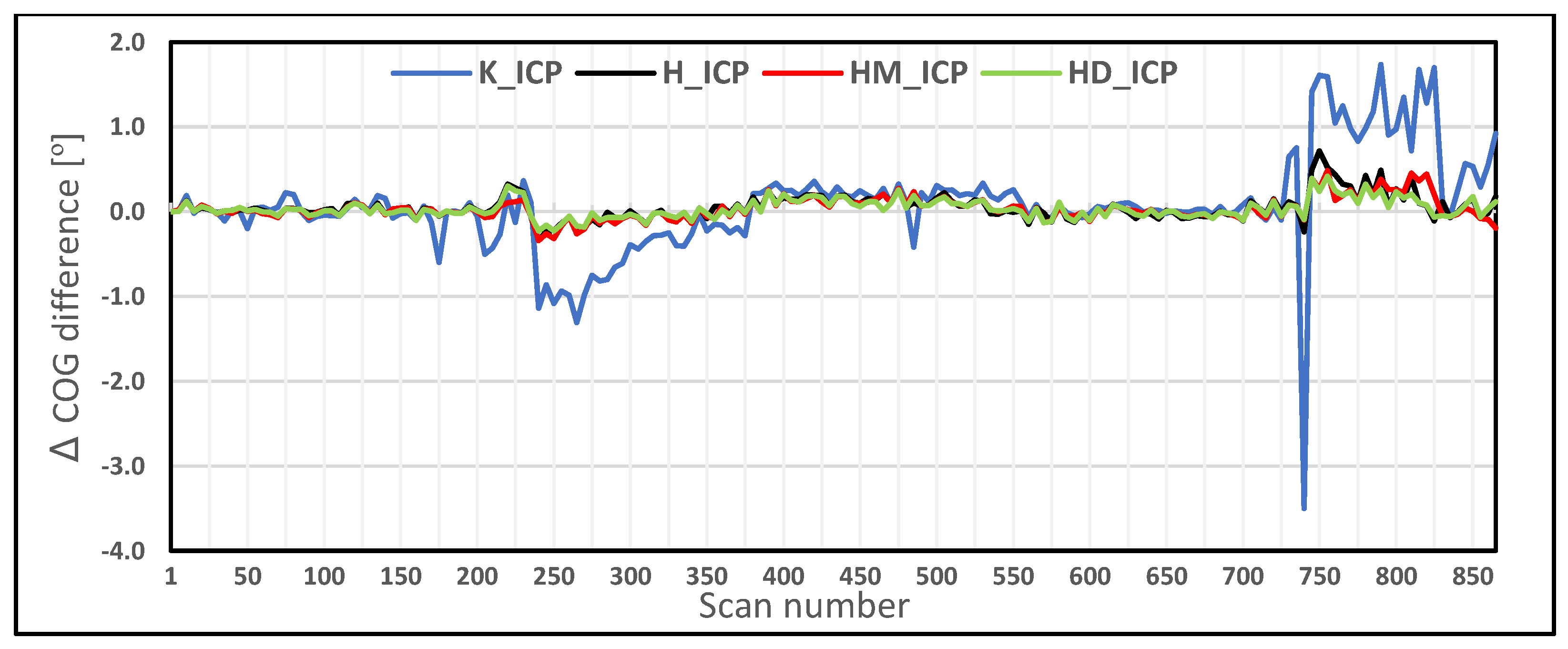
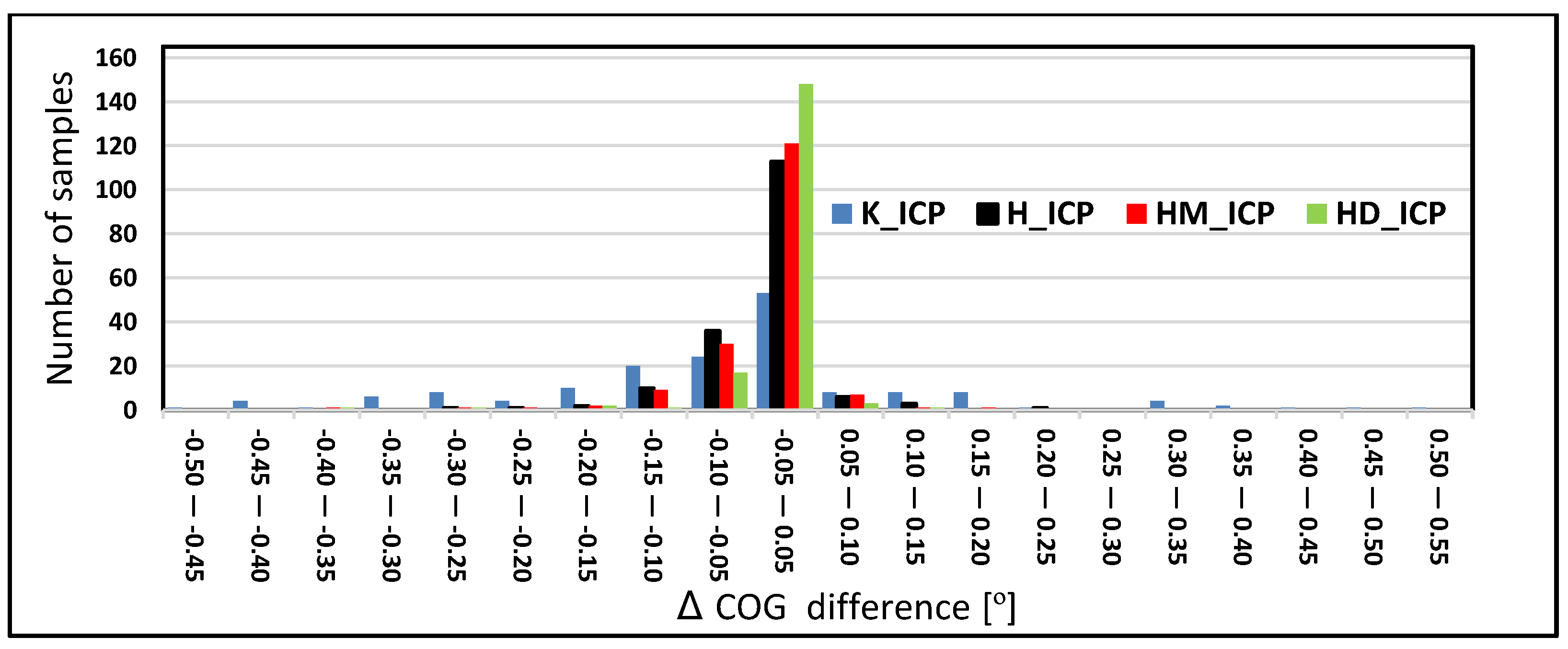
Analysis of the Accuracy of Determining the COG and SOG Using a Modified ICP Algorithm
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- IMO. Resolution A.824(19) Adoption of Amendments to Performance Standards for Devices to Measure and Indicate Speed and Distance; IMO: London, UK, 2000. [Google Scholar]
- IMO. Resolution MSC.116(73), Performance Standards for Marine Transmitting Heading Devices (thds); IMO: London, UK, 2000. [Google Scholar]
- Naus, K.; Waz, M. Precision in Determining Ship Position using the Method of Comparing an Omnidirectional Map to a Visual Shoreline Image. J. Navig. 2016, 69, 391–413. [Google Scholar] [CrossRef]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Obstacle Avoidance Approaches for Autonomous Navigation of Unmanned Surface Vehicles. J. Navig. 2018, 71, 241–256. [Google Scholar] [CrossRef]
- Allen, C.H. The Seabots are Coming Here: Should they be Treated as ‘Vessels’? J. Navig. 2012, 65, 749–752. [Google Scholar] [CrossRef]
- Nowak, A. The Proposal to “Snapshot” Raim Method for Gnss Vessel Receivers Working in Poor Space Segment Geometry. Pol. Marit. Res. 2015, 22, 3–8. [Google Scholar] [CrossRef]
- Xie, P.; Petovello, M.G. Measuring GNSS Multipath Distributions in Urban Canyon Environments. IEEE Trans. Instrum. Meas. 2015, 64, 366–377. [Google Scholar]
- Wang, Y.; Chen, X.; Liu, P. Statistical Multipath Model Based on Experimental GNSS Data in Static Urban Canyon Environment. Sensors 2018, 18, 1149. [Google Scholar] [CrossRef]
- Shafiee, E.; Mosavi, M.R.; Moazedi, M. Detection of Spoofing Attack using Machine Learning based on Multi-Layer Neural Network in Single-Frequency GPS Receivers. J. Navig. 2018, 71, 169–188. [Google Scholar] [CrossRef]
- Guo, R.; Sun, F.; Yuan, J. ICP based on Polar Point Matching with application to Graph-SLAM. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 1122–1127. [Google Scholar]
- Navarro, W.; Vélez, J.C.; Orfila, A. Estimation of sea state parameters using X-band marine radar technology in coastal areas. In Proceedings of the Sixth International Conference on Remote Sensing and Geoinformation of the Environment (RSCy2018), Paphos, Cyprus, 26–29 March 2018. [Google Scholar]
- Mendes, E.; Koch, P.; Lacroix, S. ICP-based pose-graph SLAM. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 195–200. [Google Scholar]
- Yang, J.; Li, H.; Jia, Y. Go-ICP: Solving 3D Registration Efficiently and Globally Optimally. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 1457–1464. [Google Scholar]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Men, H.; Gebre, B.; Pochiraju, K. Color point cloud registration with 4D ICP algorithm. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 1511–1516. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous localization and mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Moratuwage, M.D.P.; Wijesoma, W.S.; Kalyan, B.; Dong, J.F.; Namal Senarathne, P.G.C.; Hover, F.S.; Patrikalakis, N.M. Collaborative multi-vehicle localization and mapping in marine environments. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–6. [Google Scholar]
- Ribas, D.; Ridao, P.; Neira, J. Underwater SLAM for Structured Environments Using an Imaging Sonar; Springer Tracts in Advanced Robotics Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-642-14039-6. [Google Scholar]
- Nieto, J.; Bailey, T.; Nebot, E. Recursive scan-matching SLAM. Robot. Auton. Syst. 2007, 55, 39–49. [Google Scholar] [CrossRef]
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets: Open-source library and experimental protocol. Auton. Robot. 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]
- Olson, E. Robust and Efficient Robotic Mapping. Ph.D. Thesis, Department of Electrical Engineering and Computer Science, MIT, Cambridge, MA, USA, 2008. [Google Scholar]
- Konecny, J.; Prauzek, M.; Kromer, P.; Musilek, P. Novel Point-to-Point Scan Matching Algorithm Based on Cross-Correlation. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Callmer, J.; Törnqvist, D.; Gustafsson, F.; Svensson, H.; Carlbom, P. Radar SLAM using visual features. EURASIP J. Adv. Signal Process. 2011, 2011, 71–82. [Google Scholar] [CrossRef]
- Amigoni, F.; Gasparini, S.; Gimi, M. Scan matching without odometry information. In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, SciTePress—Science and Technology Publications, Setúbal, Portugal, 25–28 August 2004; pp. 349–352. [Google Scholar]
- He, Y.; Liang, B.; Yang, J.; Li, S.; He, J. An Iterative Closest Points Algorithm for Registration of 3D Laser Scanner Point Clouds with Geometric Features. Sensors 2017, 17, 1862. [Google Scholar] [CrossRef] [PubMed]
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 19–25. [Google Scholar]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotics: Science and Systems V; Robotics: Science and Systems Foundation, Boston, MA, USA, 28 June–01 July 2009. [Google Scholar]
- Wang, Y.; Xiong, R.; Li, Q. Em-based point to plane icp for 3d simultaneous localization and mapping. Int. J. Robot. Autom. 2013, 28. [Google Scholar] [CrossRef]
- Godin, G.; Rioux, M.; Baribeau, R. Three-Dimensional Registration Using Range and Intensity Information; The International Society for Optical Engineering: Boston, MA, USA, 1994. [Google Scholar]
- Marinov, A.; Zlateva, N.; Dimov, D.; Marinov, D. Weighted ICP Algorithm for Alignment of Stars from Scanned Astronomical Photographic Plates. Serdica J. Comput. Sofia Bulg. 2012, 6, 101–110. [Google Scholar]
- Amamra, A.; Aouf, N.; Stuart, D.; Richardson, M. A recursive robust filtering approach for 3D registration. SignalImage Video Process. 2016, 10, 835–842. [Google Scholar] [CrossRef]
- Wang, R.; Geng, Z. WA-ICP algorithm for tackling ambiguous correspondence. In Proceedings of the 2015 3rd IAPR Asian Conference on Pattern Recognition (ACPR), Kuala Lumpur, Malaysia, 3–6 November 2015; pp. 76–80. [Google Scholar]
- Naus, K.; Wąż, M. Ripping Radar Image with the Sea Map Using the Alignment Method 2009–2019; Logistyka, Institute of Logistics and Warehousing: Poznan, Poland, 2010. [Google Scholar]
- Naus, K.; Wąż, M. Accuracy in fixing ship’s positions by camera survey of bearings. Geod. Cartogr. 2011, 60, 61–73. [Google Scholar] [CrossRef]
- Scansce. User’s Manual and Technical Specifications. Available online: www.robotshop.com/ media/files/pdf2/sweep_user_manual.pdf (accessed on 1 February 2019).
- Marden, S.; Guivant, J. Improving the Performance of ICP for Real-Time Applications using an Approximate Nearest Neighbour Search. In Proceedings of the Australasian Conference on Robotics and Automation, Wellington, New Zealand, 3–5 December 2012; pp. 3–5. [Google Scholar]
- Bentley, J.L. Multidimensional binary search trees used for associative searching. Commun. ACM 1975, 18, 509–517. [Google Scholar] [CrossRef]
- Greenspan, M.; Yurick, M. Approximate K-D tree search for efficient ICP. In Proceedings of the Fourth International Conference on 3-D Digital Imaging and Modeling, Banff, AB, Canada, 6–10 October 2003; pp. 442–448. [Google Scholar]
- Jost, T.; Hugli, H. A multi-resolution ICP with heuristic closest point search for fast and robust 3D registration of range images. In Proceedings of the Fourth International Conference on 3-D Digital Imaging and Modeling, Banff, AB, Canada, 6–13 October 2003; pp. 427–433. [Google Scholar]
- Eggert, D.; Dalyot, S. Octree-based simd strategy for icp registration and alignment of 3d point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, I–3, 105–110. [Google Scholar] [CrossRef]
- Huber, P.J. Robust Estimation of a Location Parameter. In Breakthroughs in Statistics: Methodology and Distribution; Kotz, S., Johnson, N.L., Eds.; Springer New York: New York, NY, USA, 1992; pp. 492–518. ISBN 978-1-4612-4380-9. [Google Scholar]
- Zhao, Q.; Han, X.H.; Chen, Y.W. A robust registration method using Huber ICP and low rank and sparse decomposition. In Proceedings of the 2015 Asia-Pacific Signal and Information Processing Association Annual Summit and Conference (APSIPA), Hong Kong, China, 16–19 December 2015; pp. 744–752. [Google Scholar]
- Zhllin, L. Robust surface matching for automated detection of local deformations using least-median-of-squares estimator. Photogramm. Eng. Remote Sens. 2001, 67, 1283–1292. [Google Scholar]
- Masuda, T.; Sakaue, K.; Yokoya, N. Registration and integration of multiple range images for 3-D model construction. In Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, 25–29 August 1996; pp. 879–883. [Google Scholar]
- Bergström, P.; Edlund, O. Robust registration of point sets using iteratively reweighted least squares. Comput. Optim. Appl. 2014, 58, 543–561. [Google Scholar] [CrossRef]
- Leica Geosystems. Leica GS10/GS15 User Manual. Available online: http://www.surveyequipment.com/ PDFs/Leica_Viva_GS10_GS15_ User_Manual.pdf (accessed on 1 February 2019).
- IEC. Maritime Navigation and Radiocommunication Equipment and Systems—Digital Interfaces—Part 3: Multiple Talker and Multiple Listeners. High Speed Network Bus; IEC: Geneve, Switzerland, 2014. [Google Scholar]
- NMEA. National Marine Electronics Association. Available online: https://www.nmea.org /content/nmea_standards/v411.asp (accessed on 5 February 2019).
- Data Repository. Available online: https://github.com/lukisp2/ICP_DATA_MARINA (accessed on 16 August 2019).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Mean Value | Standard Deviation | Maximum Value | |||
|---|---|---|---|---|---|---|
| K_ICP | −0.031 | 0.08 | 0.113 | 0.57 | −0.524 | −3.5 |
| H_ICP | −0.013 | 0.05 | 0.031 | 0.14 | −0.319 | 0.72 |
| HM_ICP | −0.012 | 0.03 | 0.031 | 0.13 | −0.185 | −0.48 |
| HD_ICP | −0.007 | 0.03 | 0.026 | 0.11 | −0.18 | 0.42 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naus, K.; Marchel, Ł. Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Appl. Sci. 2019, 9, 3530. https://doi.org/10.3390/app9173530
Naus K, Marchel Ł. Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Applied Sciences. 2019; 9(17):3530. https://doi.org/10.3390/app9173530
Chicago/Turabian StyleNaus, Krzysztof, and Łukasz Marchel. 2019. "Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters" Applied Sciences 9, no. 17: 3530. https://doi.org/10.3390/app9173530
APA StyleNaus, K., & Marchel, Ł. (2019). Use of a Weighted ICP Algorithm to Precisely Determine USV Movement Parameters. Applied Sciences, 9(17), 3530. https://doi.org/10.3390/app9173530