Optimizing Android Facial Expressions Using Genetic Algorithms


Abstract
:1. Introduction
2. EveR Androids
3. Facial Expression Generation Based on Genetic Algorithms
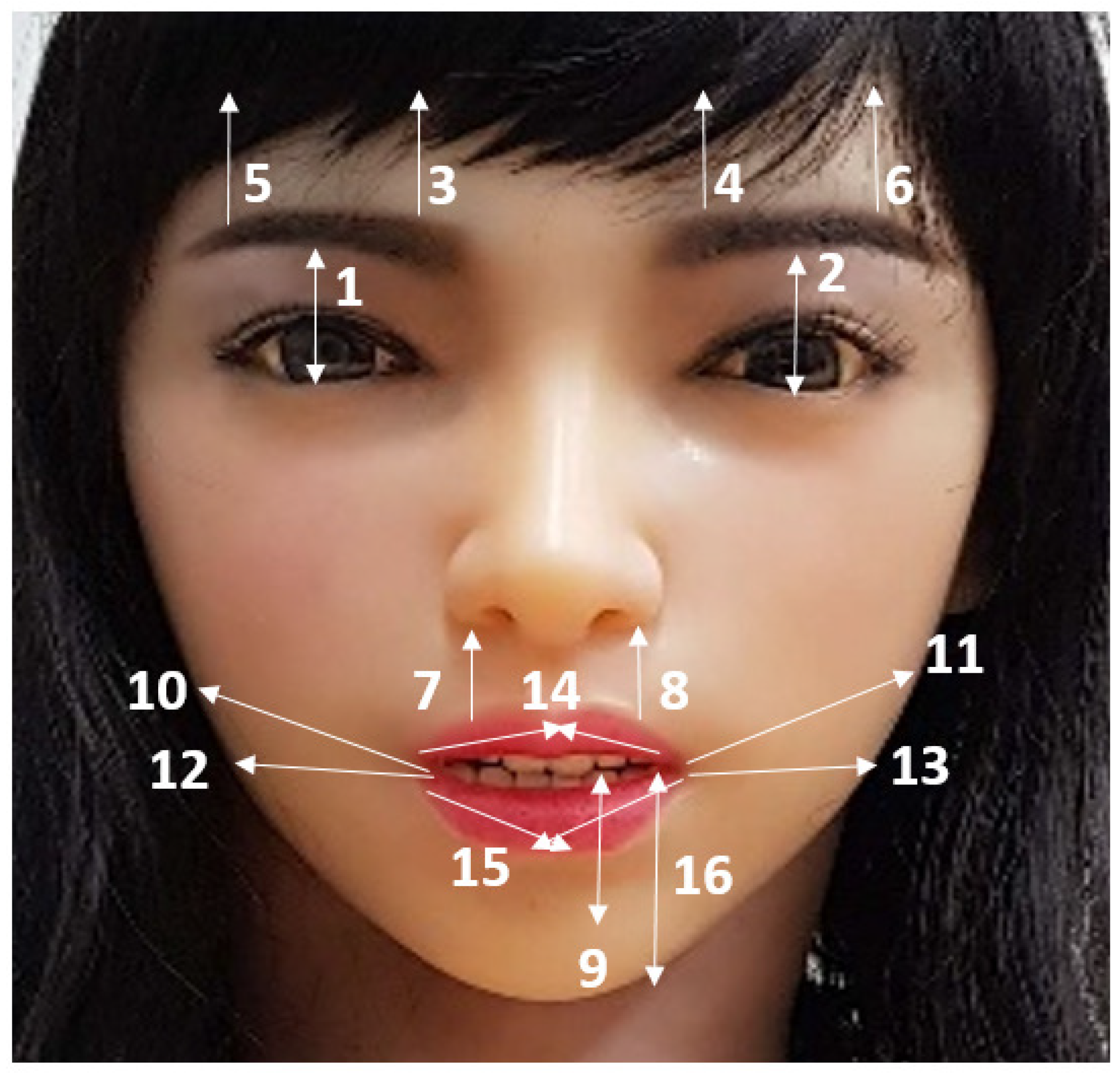
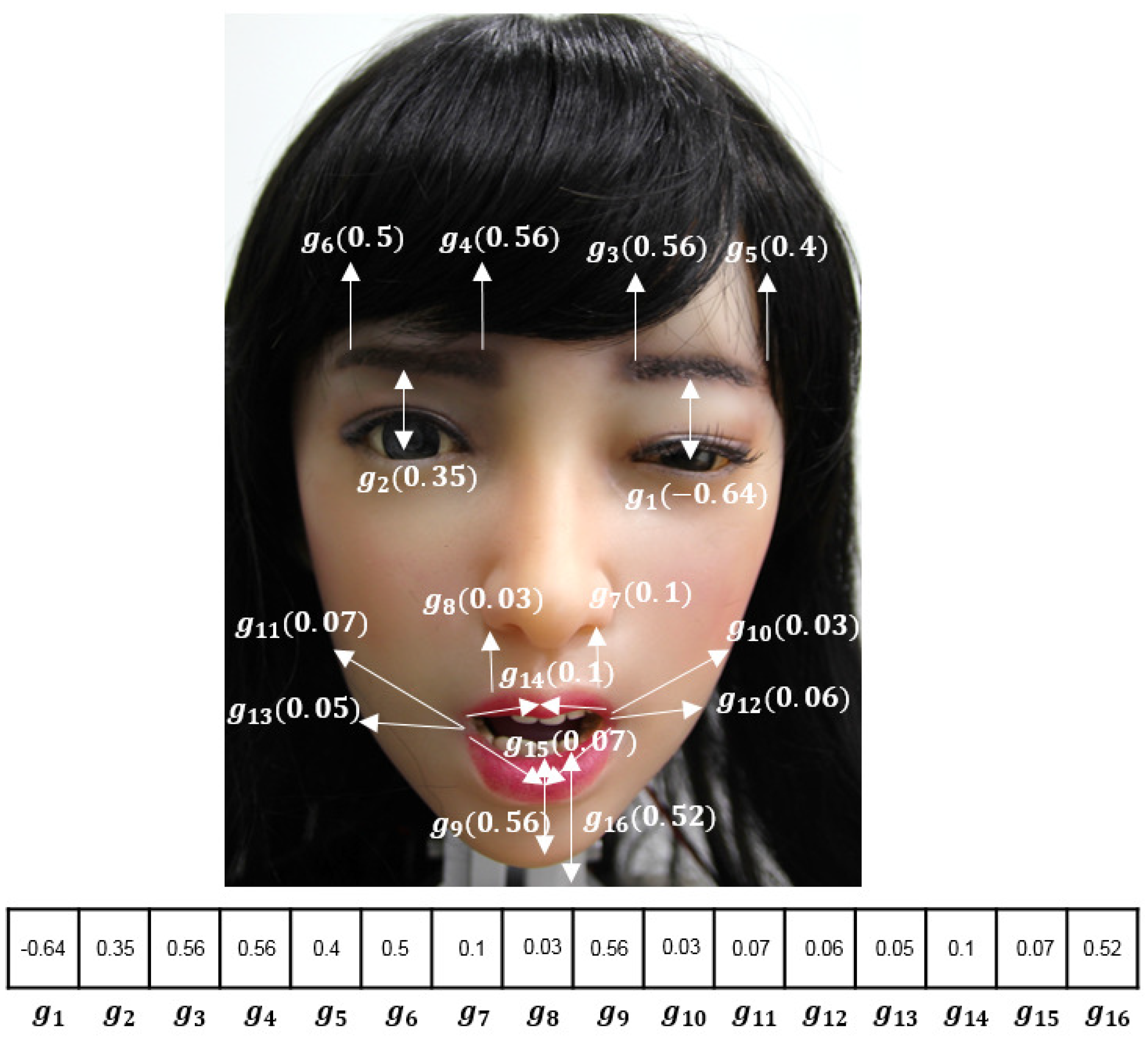
3.1. Encoding of Facial Expressions
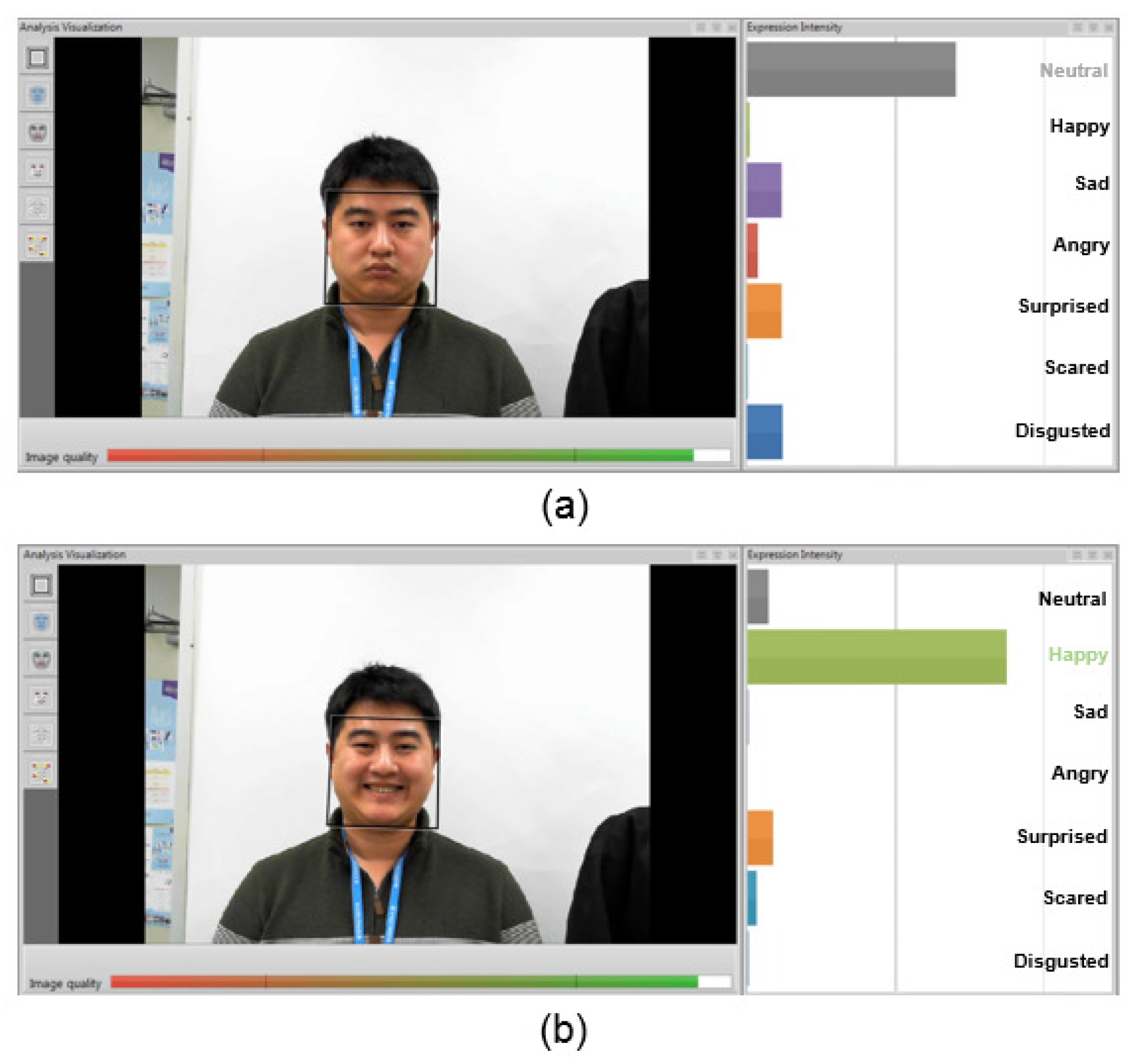
3.2. Evaluation
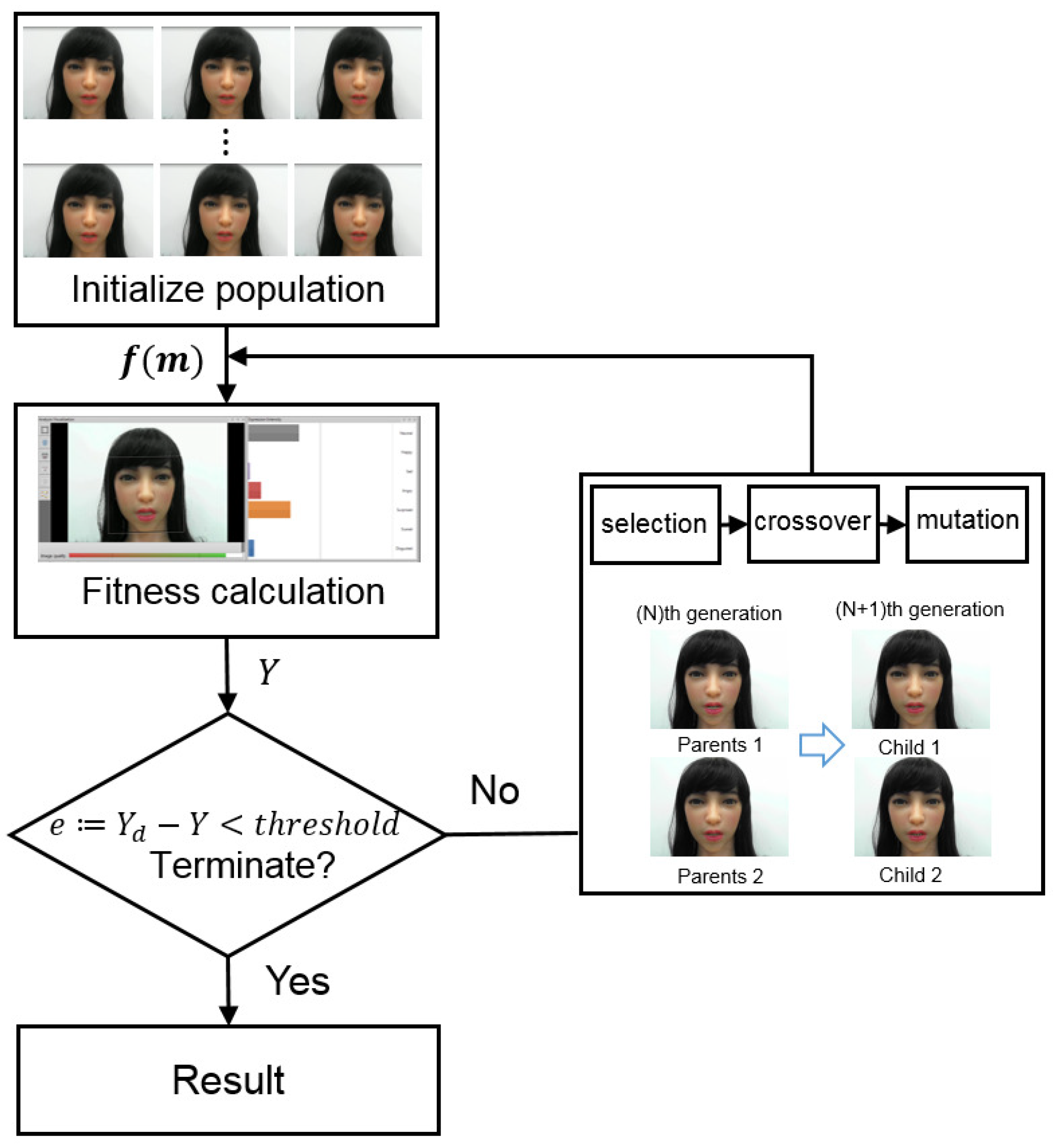
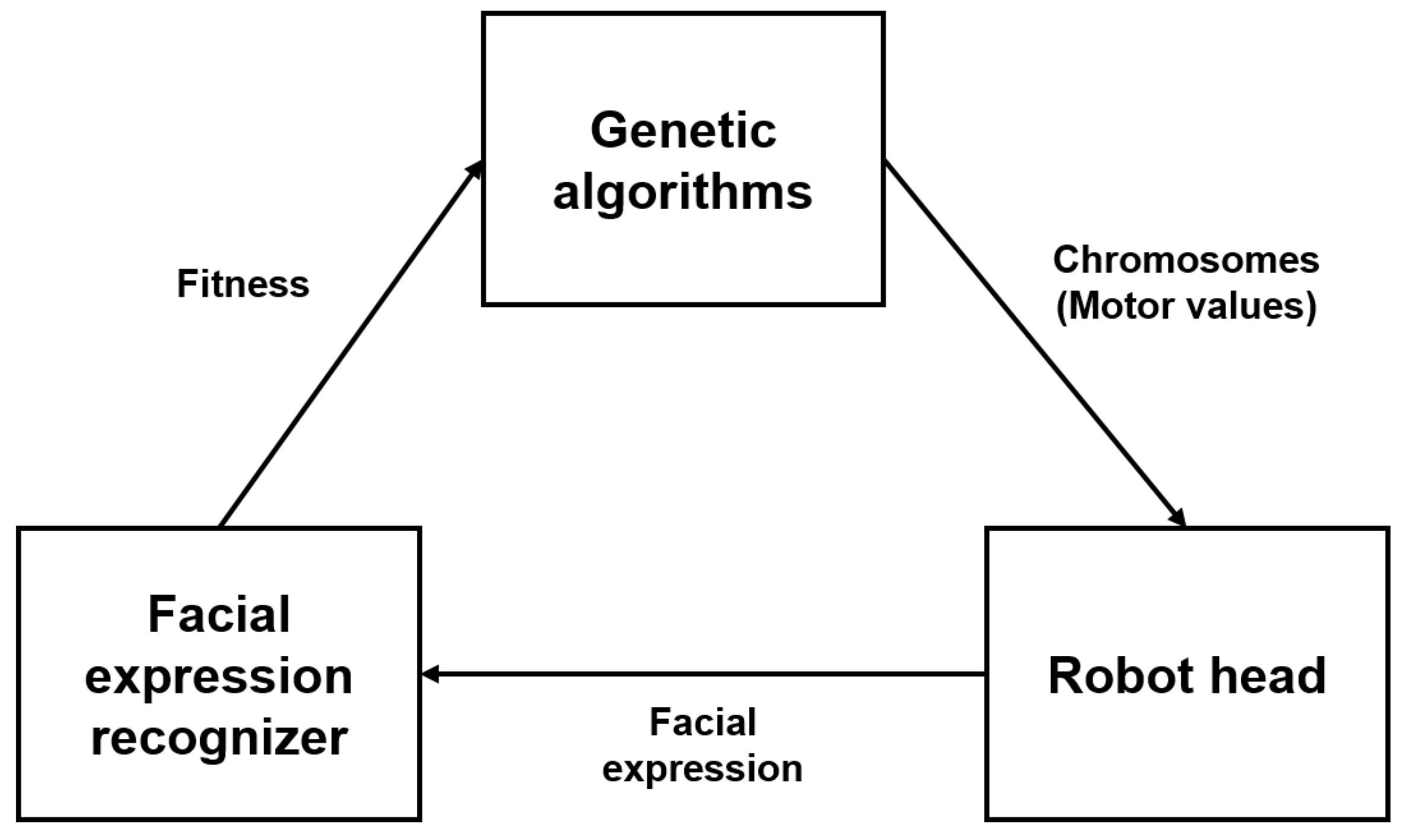
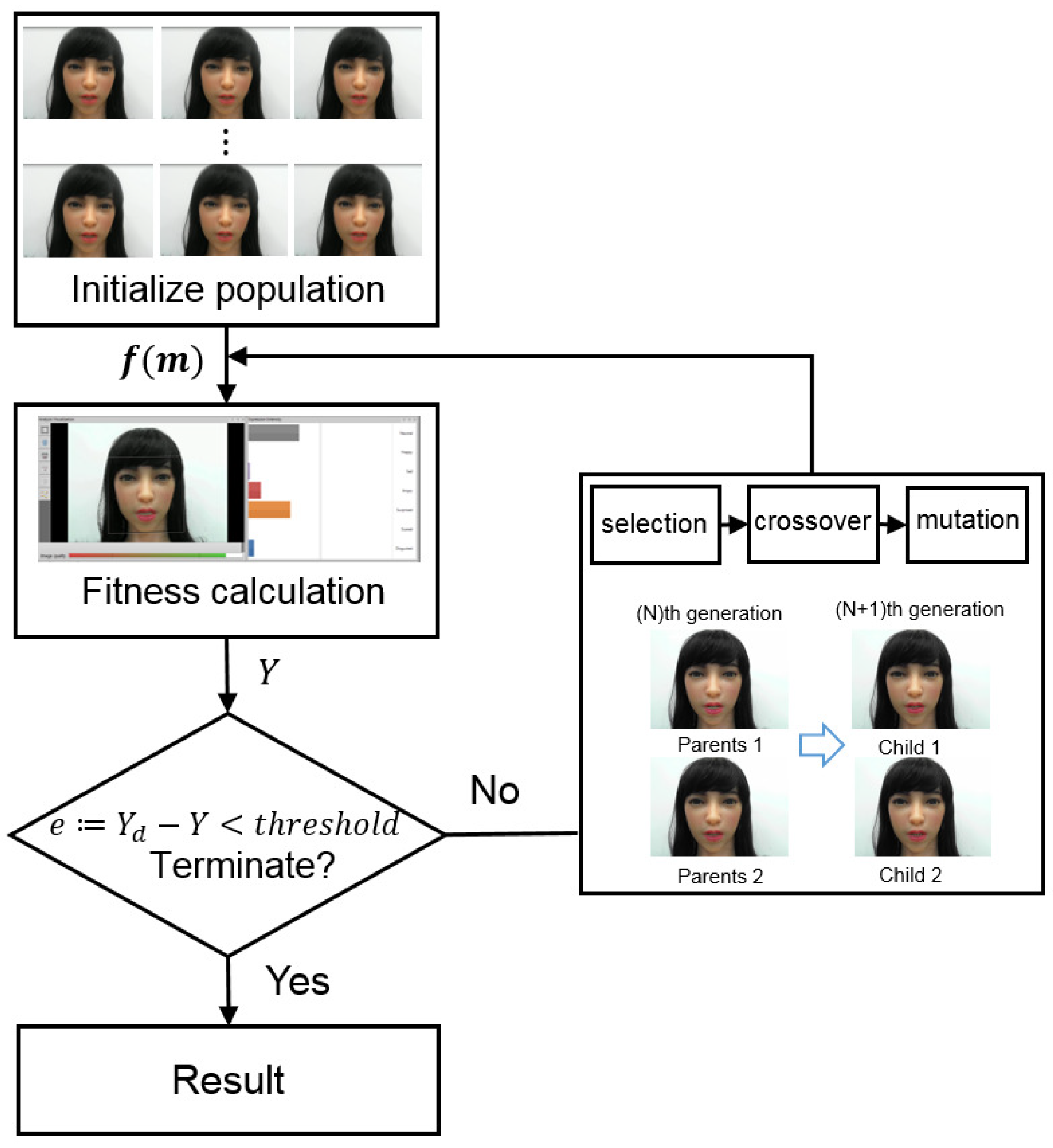
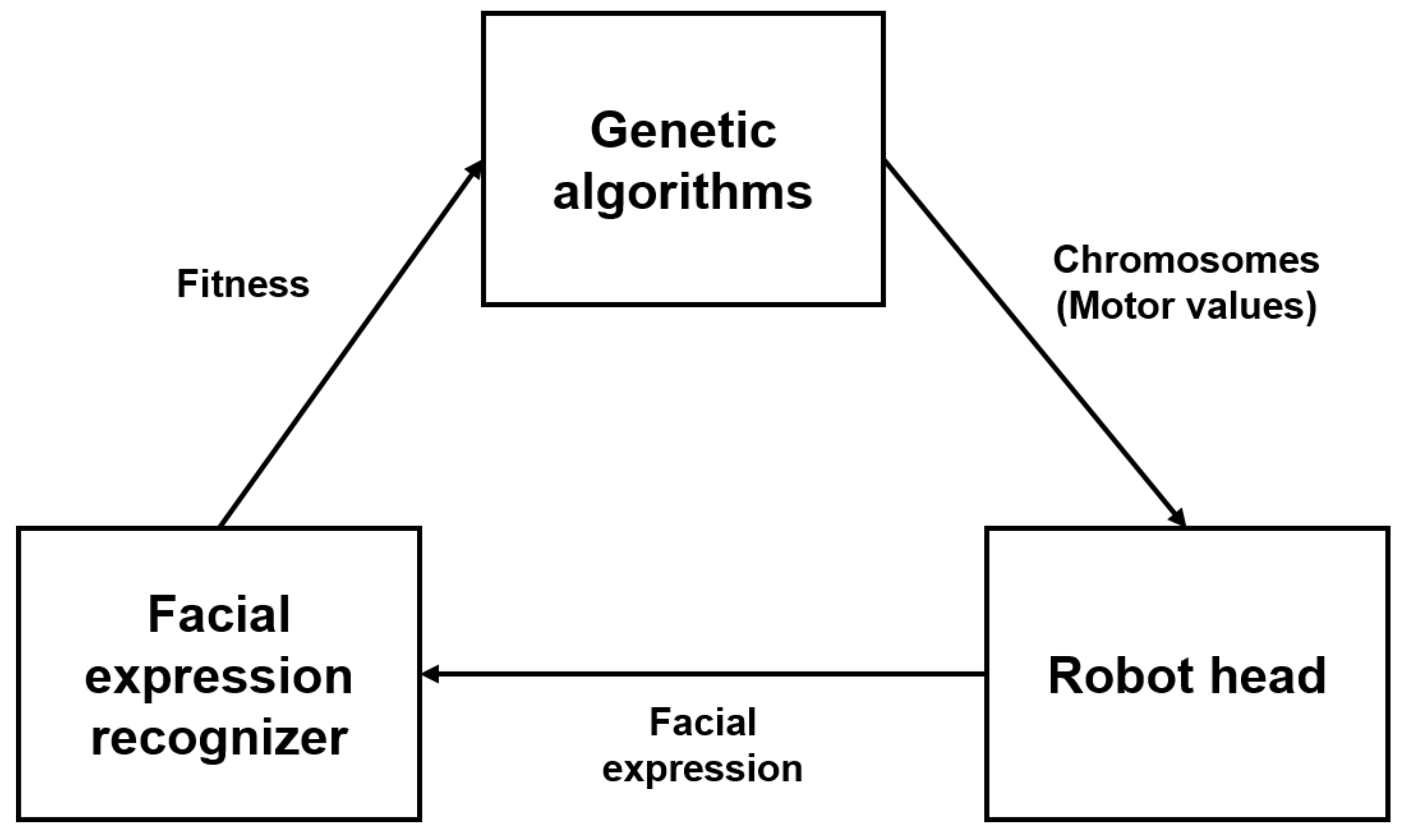
3.3. Facial Expression Generation Optimization System
4. Experiment and Analysis
4.1. Experimental Setup
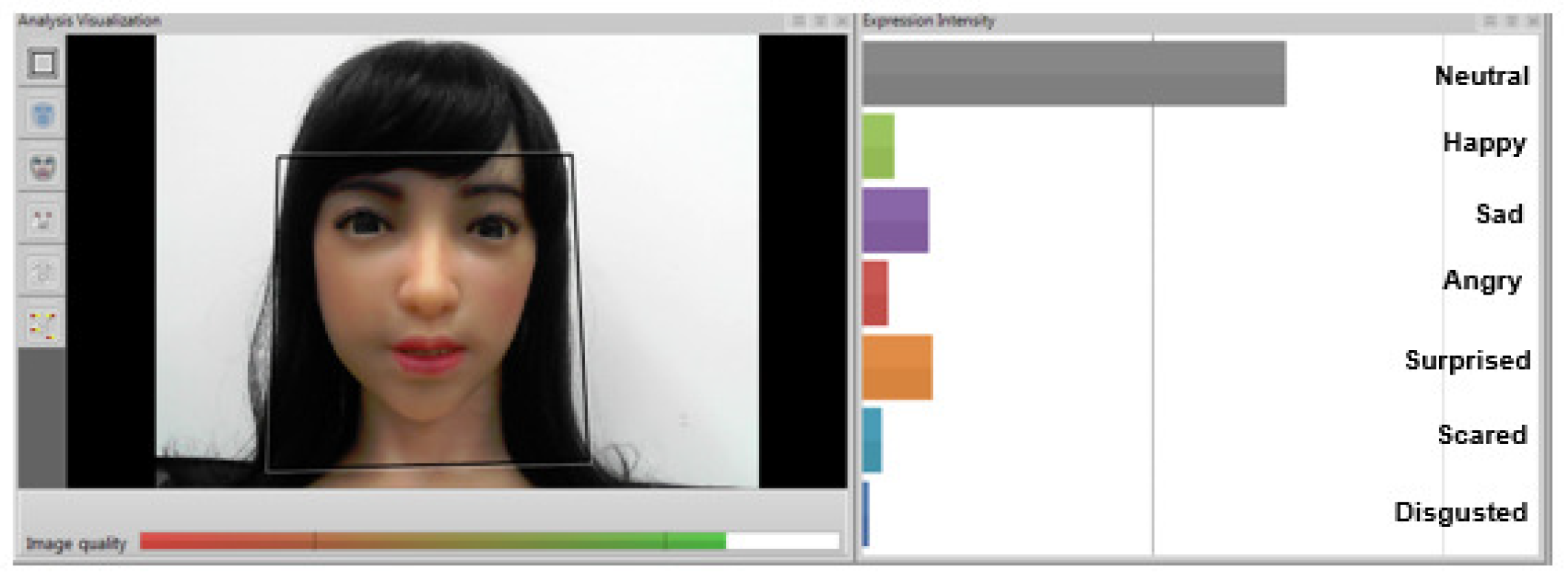
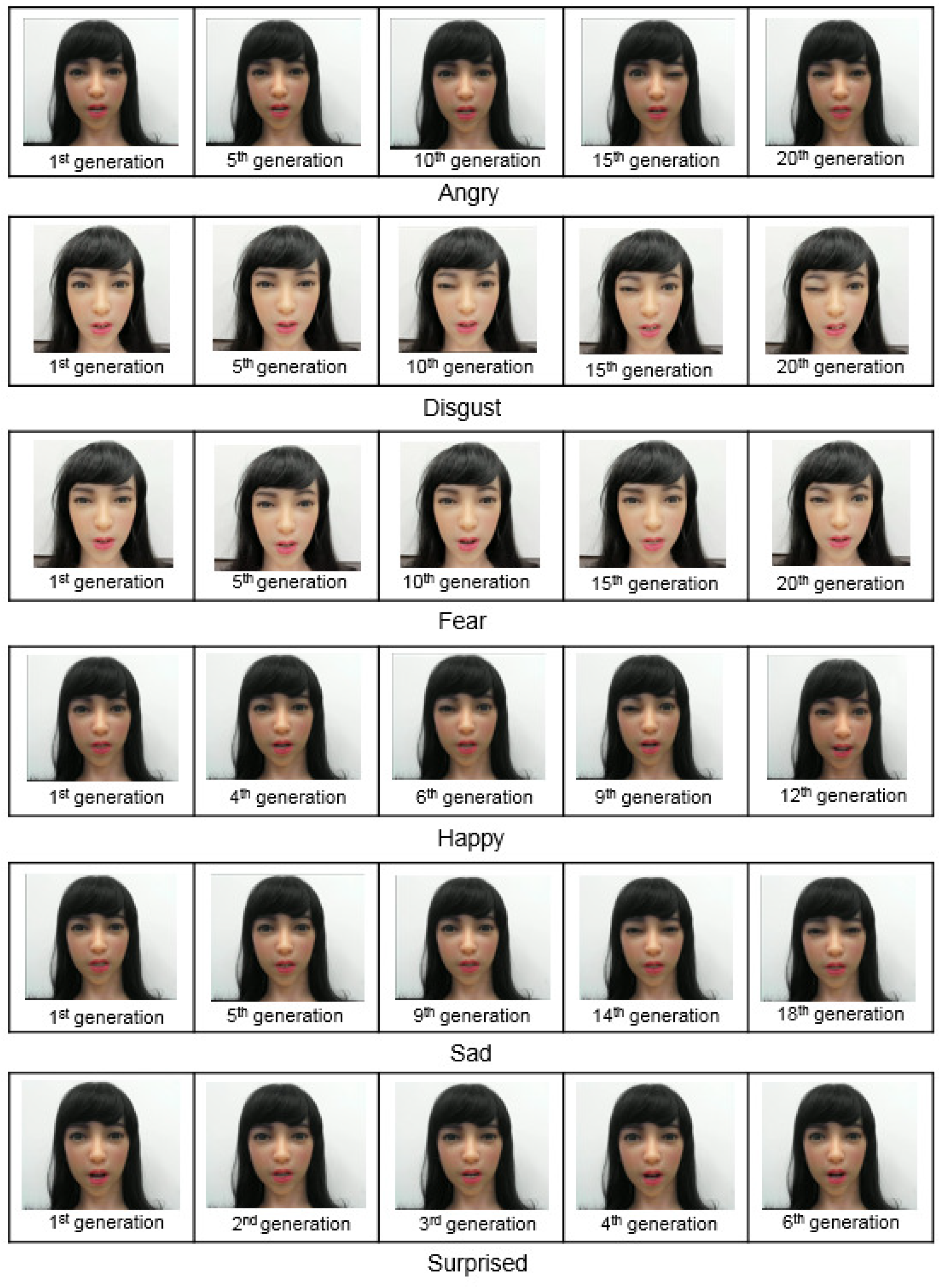
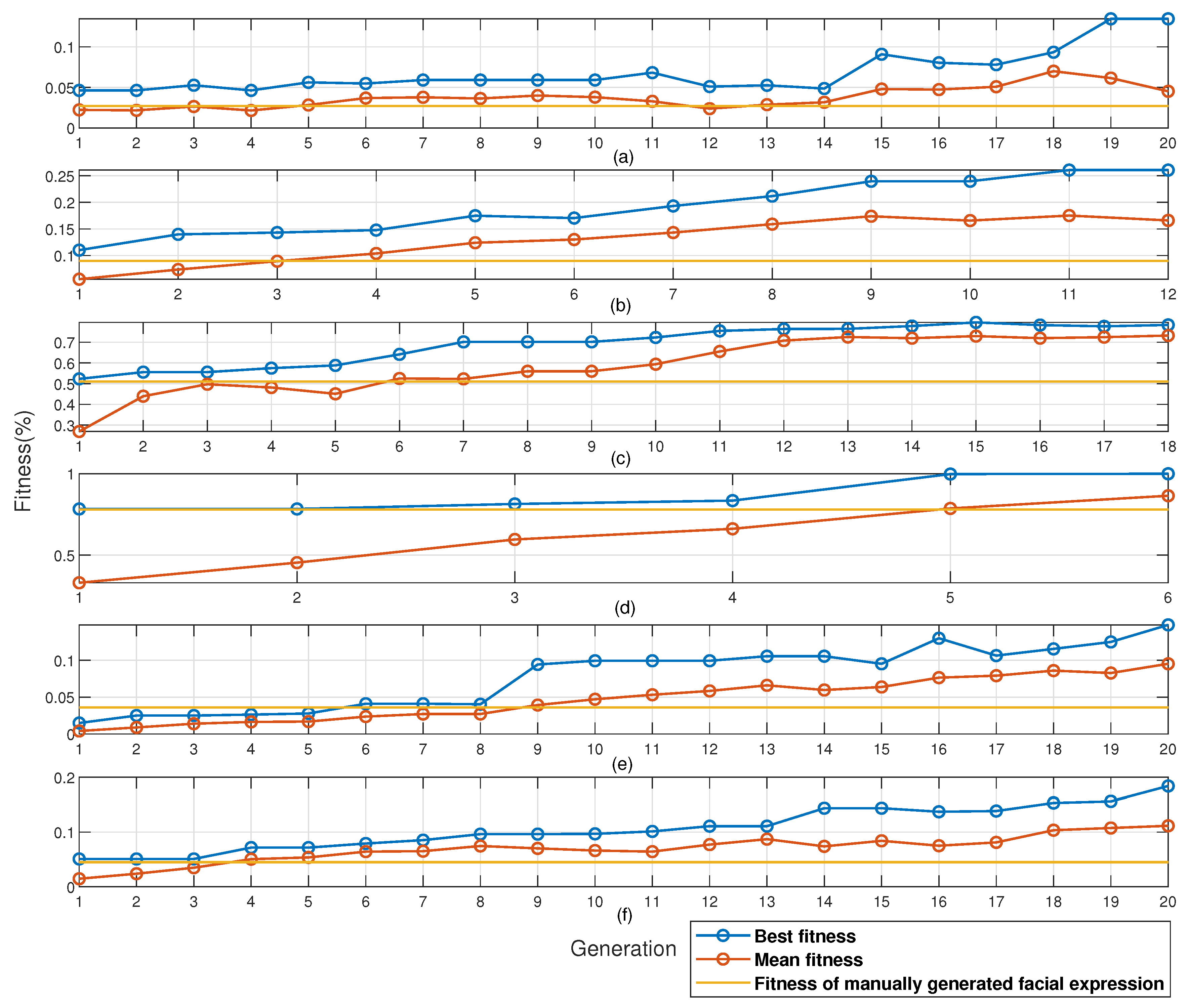
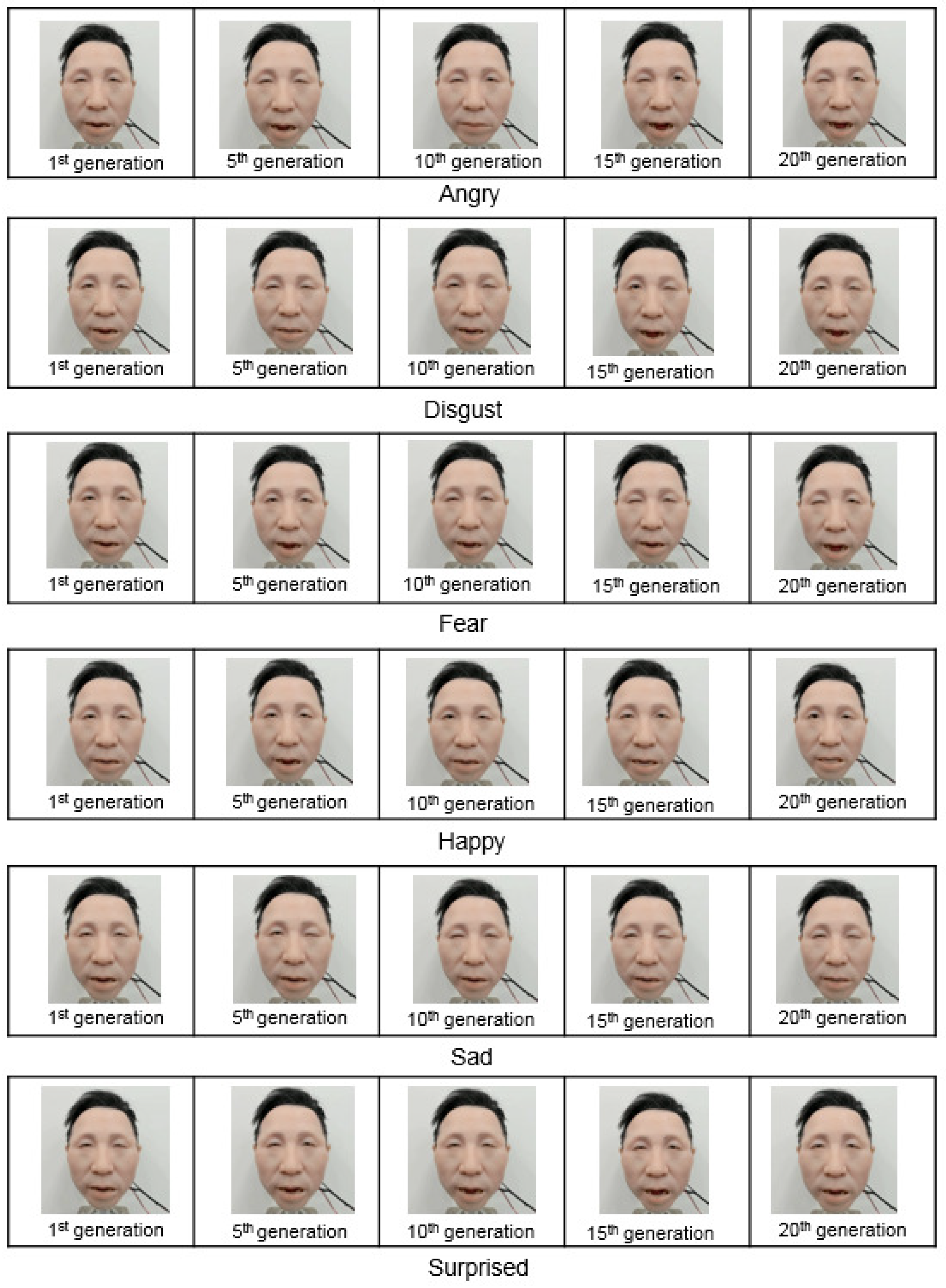
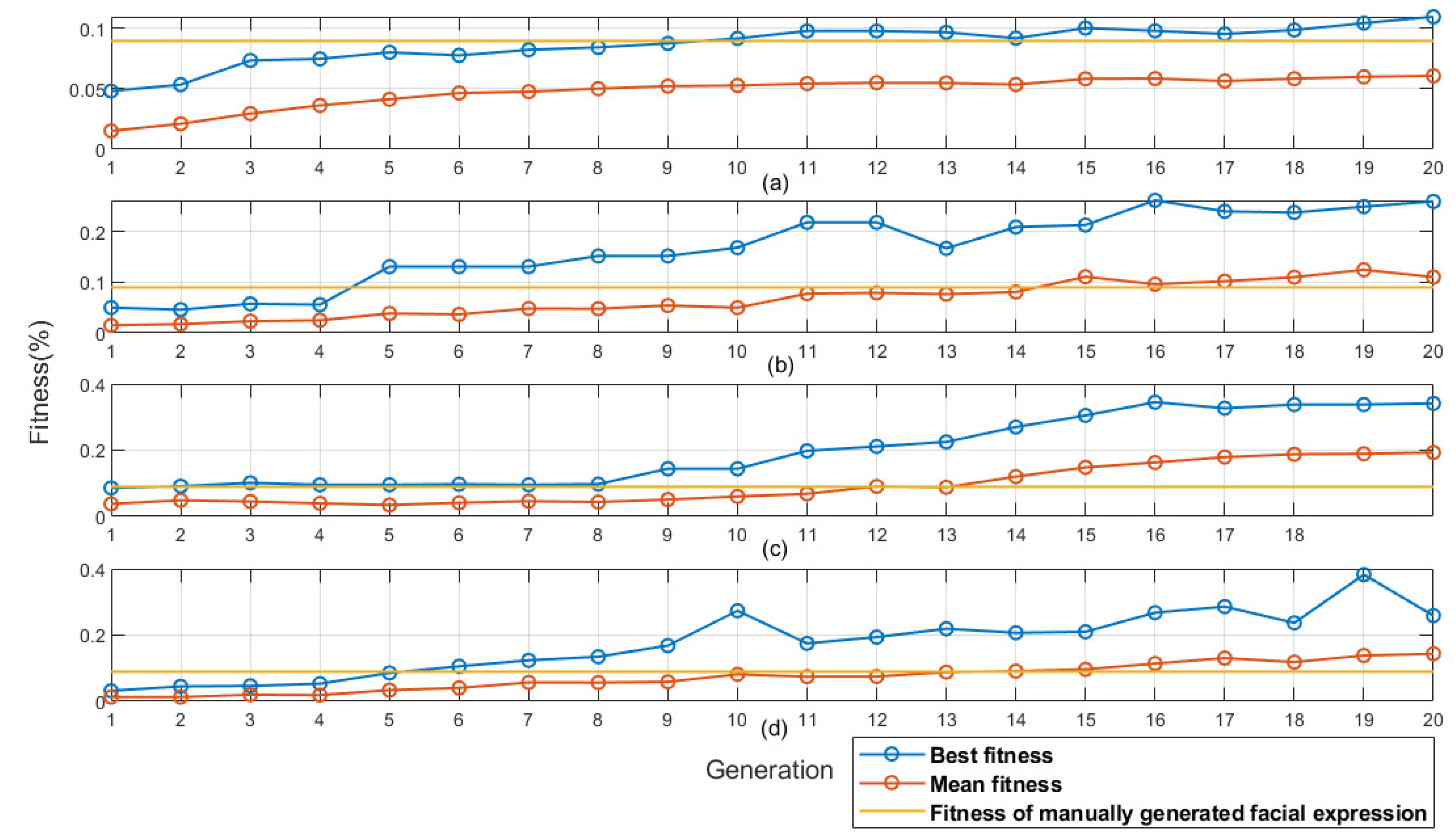
4.2. Facial Expression Analysis
5. Discussion
5.1. Difference of Facial Expression According to Recognition Performance
5.2. Limitations
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Duffy, B.D. Anthropomorphism and the Social Robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Scheeff, M.; Pinto, J.; Rahardja, K.; Snibbe, T.; Tow, R. Experiences with Sparky, a Social Robot. In Proceedings of the Workshop on Interactive Robotics and Entertainment, Pittsburgh, PA, USA, 30 April–1 May 2002. [Google Scholar]
- Saldien, J.; Goris, K.; Vanderborght, B.; Vanderfaeillie, J.; Lefeber, D. Expressing Emotions with The Social Robot Probo. Int. J. Soc. Robot. 2010, 4, 377–389. [Google Scholar] [CrossRef]
- Zalama, E.; García-Bermejo, J.G.; Marcos, S.; Domínguez, S.; Feliz, R.; Pinillos, R.; López, J. Sacarino, a Service Robot in a Hotel Environment. In Proceedings of the ROBOT2013: First Iberian Robotics Conference, Madrid, Spain, 28–29 November 2013; Springer: Cham, Switzerland, 2014; Volume 253, pp. 3–14. [Google Scholar]
- Pinillos, R.; Marcos, S.; Feliz, R.; Zalama, E.; García-Bermejo, J.G. Long-Term Assessment of a Service Robot in a Hotel Environment. Robot. Auton. Syst. 2016, 79, 40–57. [Google Scholar] [CrossRef]
- Lee, K.; Kim, H.; Yoon, W.C.; Yoon, Y.; Kwon, D. Designing a Human-Robot Interaction Framework for Home Service Robot. In Proceedings of the 2005 IEEE International Workshop on Robots and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; pp. 286–293. [Google Scholar]
- Viraj, M.A.; Muthugala, J.; Buddhika, A.G.; Jayasekara, P. MIRob: An Intelligent Service Robot that Learns from Interactive Discussions while Handling Uncertain Information in User Instructions. In Proceedings of the 2016 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 397–402. [Google Scholar]
- Vasquez, H.A.; Vargas, H.S.; Sucar, L.E. Using Gestures to Interact with a Service Robot using Kinect 2. Res. Comput. Sci. 2015, 96, 85–93. [Google Scholar]
- Quan, L.; Pei, D.; Wang, B.; Ruan, W. Research on Human Target Recognition Algorithm of Home Service Robot based on Fast-RCNN. In Proceedings of the 2017 10th International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 9–10 October 2017; pp. 369–373. [Google Scholar]
- Lin, C.; Li, T.S.; Kuo, P.; Wang, Y. Integrated Particle Swarm Optimization Algorithm based Obstacle Avoidance Control Design for Home Service Robot. Comput. Electr. Eng. 2016, 56, 748–762. [Google Scholar] [CrossRef]
- Minato, T.; Shimada, M.; Ishiguro, H.; Itakura, S. Development of an Android Robot for Studying Human-Robot Interaction. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Graz, Austria, 9–11 July 2004; pp. 424–434. [Google Scholar]
- Lee, D.; Lee, T.; So, B.; Choi, M.; Shin, E.; Yang, K.; Baek, M.; Kim, H.; Lee, H. Development of an Android for Emotional Expression and Human Interaction. In Proceedings of the 17th World Congress the International Federation of Automatic, Control, Seoul, Korea, 6–11 July 2008; pp. 4336–4337. [Google Scholar]
- Hyung, H.; Yoon, H.U.; Choi, D.; Lee, D.; Hur, M.; Lee, D. Facial Expression Generation of an Android Robot based on Probabilistic Model. In Proceedings of the 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Tai’an, China, 27–31 August 2018; pp. 458–460. [Google Scholar]
- Go, D.; Hyung, H.; Yoon, H.U.; Lee, D. Android Robot Motion Generation based on Video-Recorded Human Demonstrations. In Proceedings of the2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Tai’an, China, 27–31 August 2018; pp. 476–478. [Google Scholar]
- Noma, M.; Saiwaki, N.; Itakura, S.; Ishiguro, H. Composition and Evaluation of the Humanlike Motions of an Android. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, Genova, Italy, 4–6 December 2006; pp. 163–168. [Google Scholar]
- Khoramshahi, M.; Shukla, A.; Raffard, S.; Bardy, B.G.; Billard, A. Role of Gaze Cues in Interpersonal Motor Coordination: Towards Higher Affiliation in Human-Robot Interaction. PLoS ONE 2016, 11, e0156874. [Google Scholar] [CrossRef] [PubMed]
- Shimada, M.; Yoshikawa, Y.; Asada, M.; Saiwaki, N.; Ishiguro, H. Effects of Observing Eye Contact between a Robot and Another Person. Int. J. Soc. Robot. 2011, 3, 143–154. [Google Scholar] [CrossRef]
- Ahn, H.S.; Lee, D.; Choi, D.; Lee, D.Y.; Hur, M.H.; Lee, H.; Shon, W.H. Development of an Android for Singing with Facial Expression. In Proceedings of the IECON 2011-37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011; pp. 104–109. [Google Scholar]
- Becker-Asano, C.; Ishiguro, H. Evaluating Facial Displays of Emotion for the Android Robot Geminoid F. In Proceedings of the 2011 IEEE workshop on affective computational intelligence (WACI), Paris, France, 11–15 April 2011; pp. 1–8. [Google Scholar]
- Oh, K.; Jung, C.; Lee, Y.; Kim, S. Real-Time Lip Synchronization between Text-To-Speech (TTS) System and Robot Mouth. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 620–625. [Google Scholar]
- Kondo, Y.; Takemura, K.; Takamatsu, J.; Ogasawara, T. A Gesture-Centric Android System for Multi-Party Human-Robot Interaction. J. Hum. Robot Int. 2013, 2, 133–151. [Google Scholar] [CrossRef]
- Salem, M.; Kopp, S.; Wachsmuth, I.; Rohlfing, K.; Joublin, F. Generation and Evaluation of Communicative Robot Gesture. Int. J. Soc. Robot. 2012, 201–217. [Google Scholar] [CrossRef]
- Salem, M.; Kopp, S.; Wachsmuth, I.; Joublin, F. Towards an Integrated Model of Speech and Gesture Production for Multi-Modal Robot Behavior. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 13–15 September 2010; pp. 614–619. [Google Scholar]
- Mehrabian, A. Silent Messages Implicit Communication of Emotions and Attitudes, 2nd ed.; Wadsworth Publishing Company: Belmont, CA, USA, 1981. [Google Scholar]
- Ekman, P.; Friesen, W.V. Unmasking the Face: A Guide to Recognizing Emotions from Facial Clues; Prentice Hall: Upper Saddle River, NJ, USA, 1975. [Google Scholar]
- Marcolin, F.; Vezzetti, E. Novel Descriptors for Geometrical 3D Face Analysis. Multimed. Tools Appl. 2017, 76, 13805–13834. [Google Scholar] [CrossRef]
- Vezzetti, E.; Marcolin, F.; Stola, V. 3D human Face Soft Tissues Landmarking Method: An Advanced Approach. Comput. Ind. 2013, 64, 1326–1354. [Google Scholar] [CrossRef]
- Habib, A.; Das, S.K.; Bogdan, I.; Hanson, D.; Popa, D.O. Learning Human-like Facial Expressions for Android Phillip K. In Dick. In Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering (CASE), New Taipei, Taiwan, 18–22 August 2014; pp. 1159–1165. [Google Scholar]
- Ishi, C.T.; Minato, T.; Ishiguro, H. Analysis and Generation of Laughter Motions, and Evaluation in an Android Robot. APSIPA Trans. Signal Inf. Process. 2019, 8. [Google Scholar] [CrossRef]
- Lin, C.; Huang, C.; Cheng, L. A Small Number Actuator Mechanism Design for Anthropomorphic Face Robot. In Proceedings of the 2011 IEEE Int. Conf. on Robotics and Biomimetics, Phuket, Thailand, 7–11 December 2011; pp. 633–638. [Google Scholar]
- Hashimoto, M.; Yokogawa, C.; Sadoyama, T. Development and Control of a Face Robot Imitating Human Muscular Structures. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 1855–1860. [Google Scholar]
- Huang, Z.; Ren, F.; Bao, Y.; Huang, Z.; Ren, F. Human-like Facial Expression Imitation for Humanoid Robot based on Recurrent Neural Network. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 306–311. [Google Scholar]
- Mori, M. The Uncanny Valley. Energy 1970, 7, 33–35. [Google Scholar]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs; Springer: Berlin/Heidelberg, Germany, 1996; pp. 1–387. [Google Scholar]
- Fortin, F.; Rainville, F.D.; Gardner, M.; Parizeau, M.; Gagné, C. DEAP: Evolutionary Algorithms Made Easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Herrera, F.; Lozano, M.; Verdegay, J.L. Tackling Real-Coded Genetic Algorithms: Operators and Tools for Behavioural Analysis. Artif. Intell. Rev. 1998, 12, 265–319. [Google Scholar] [CrossRef]
- Wataru, S.; Hyniewska, S.; Minemoto, K.; Yoshikawa, S. Facial Expressions of Basic Emotions in Japanese Laypeople. Front. Psychol. 2019, 10, 1326–1354. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Number | Gene Position | Control Position |
|---|---|---|
| 1 | Right eyelid | |
| 2 | Left eyelid | |
| 3 | Inner right eyebrow | |
| 4 | Inner left eyebrow | |
| 5 | Outer right eyebrow | |
| 6 | Outer left eyebrow | |
| 7 | Above the right lip | |
| 8 | Above the left lip | |
| 9 | Lower lip | |
| 10 | Right cheek (top) | |
| 11 | Left cheek (top) | |
| 12 | Right cheek (middle) | |
| 13 | Left cheek (middle) | |
| 14 | Around the upper lip | |
| 15 | Around the lower lip | |
| 16 | Jaw |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hyung, H.-J.; Yoon, H.U.; Choi, D.; Lee, D.-Y.; Lee, D.-W. Optimizing Android Facial Expressions Using Genetic Algorithms. Appl. Sci. 2019, 9, 3379. https://doi.org/10.3390/app9163379
Hyung H-J, Yoon HU, Choi D, Lee D-Y, Lee D-W. Optimizing Android Facial Expressions Using Genetic Algorithms. Applied Sciences. 2019; 9(16):3379. https://doi.org/10.3390/app9163379
Chicago/Turabian StyleHyung, Hyun-Jun, Han Ul Yoon, Dongwoon Choi, Duk-Yeon Lee, and Dong-Wook Lee. 2019. "Optimizing Android Facial Expressions Using Genetic Algorithms" Applied Sciences 9, no. 16: 3379. https://doi.org/10.3390/app9163379
APA StyleHyung, H.-J., Yoon, H. U., Choi, D., Lee, D.-Y., & Lee, D.-W. (2019). Optimizing Android Facial Expressions Using Genetic Algorithms. Applied Sciences, 9(16), 3379. https://doi.org/10.3390/app9163379