1. Introduction
Residual life estimation is crucial in reliability engineering [
1,
2] and is the key technology for prognostic and health management (PHM), used to analyze, guarantee, and improve safety and reliability [
3]. Given the cumulative distribution function (CDF)
F(
t), probability density function (PDF)
f(
t) of a component and the lifetime
T, the CDF of the residual life
Fτ (
t) at time
τ, can be calculated by
Hence, the PDF of the residual life at time
τ is given by
Then, the point estimation of the residual life can be represented as
Weibull distributions are widely used [
4,
5]. Therefore, in this study, we assume the lifetime of the on-orbit component follows the Weibull distribution, denoted by W(
), with the CDF [
6]
The residual life PDF can be obtained by substituting Equation (4) into Equation (2), which can be written as [
5]
With the development of the techniques of science and technology, the components in satellites are highly reliable. Therefore, applications of traditional methods based on failure times are limited [
7]. However, multi-source information can be collected for these components [
8], including historical lifetime data, degradation data, similar data, and expert information. The Bayesian method could be a useful tool for the information fusion. Because of its strong ability at data fusion [
9], it has received considerable attention in various engineering fields [
10,
11].
For highly reliable components, it is difficult to estimate the residual life with data containing a small number of failures and even zero failure. However, the available degradation data could reflect the real-time state of components and could be used to enrich the information for residual life estimation [
12]. For example, a hierarchical Bayesian model was built and effectively fitted the nonlinear paths of organic light-emitting diodes [
13]. Parameters of the Wiener process and the field data were fused to obtain the posterior distributions of degradation parameters [
14]. In addition, a systematic method for using a degradation-based model selection to analyze Bayesian reliability was discussed by Li et al. [
15]. Additionally, Bernoulli data, lifetime data, and degradation data were integrated to improve the accuracy of reliability prediction [
16]. Parameters of the degradation model were determined by fusing prior degradation information and prior lifetime data, and prior distribution was updated by the field degradation data [
17]. By synthesizing multi-source data, including bivariate degradation data and lifetime data, remaining useful life (RUL) was estimated for a satellite rechargeable lithium battery [
2]. The inverse Gaussian process was used to analyze the accelerated degradation model and both the Jeffreys prior and reference prior were derived and compared [
18]. Based on the functional principal component analysis (PCA) and the Bayesian method, a new prediction method for Li ion battery residual lifetime evaluation was presented [
19].
Simultaneously, historical lifetime data and similar data can also obviously provide more reliability information. Historical lifetime data, often obtained before test and use, and the similar data are usually used to determine prior distribution based on empirical Bayes (EB) [
20] and linear empirical Bayes (LEB) methods [
21]. In practical engineering, conjugate prior is also commonly used [
22]. The moment method, as well as the ML-II method, are typically used to determine the parameters of prior distribution [
23]. Degradation data and historical lifetime data were fused to estimate the residual life [
24]. Based on the previous number of failures, the failure rate was obtained from a new software reliability model [
25]. The reliability of Weibull-distributed components was evaluated under the small sample sizes and zero-failure data by fusing both the target and similar products [
26]. By fusing the prior information of similar products, the modified Bayesian method of assessing the reliability of binomial components was proposed [
27].
Expert information is also valuable especially when the field data are insufficient [
28]. Integration of expert knowledge into lifetime estimation was presented [
29]. An expert-judgement process for fusing multi-source prior information was developed by Yang et al. [
30]. Various available sources of expert knowledge and data, at both subsystem and system levels, were integrated [
31], and methods for fusing lifetime data and expert information were discussed [
32].
Prior information is important in Bayesian theory. After obtaining prior distributions according to different kinds of reliability information, the next step is to aggregate these prior distributions to eliminate the uncertainty of each multi-source information. Existing methods concerning the prior distribution fusion are based on confidence level [
33], correlation function [
34], sufficiency measure [
35], expert judgement [
36], maximum entropy-moment estimation [
37], fuzzy logic operators [
38], maximum likelihood principle [
39], and the ML-II method [
40]. Peng [
41,
42] has made special contributions to this field.
These models and methodologies have formed a solid foundation for the Bayesian estimation of residual life. However, after extensive literature review, we found that (i) although work has been done on Bayesian theory and its applications, most of the existing literature concentrates mainly on certain aspects. The overall process and detailed illustration of the Bayesian method by fusing all this multi-source information simultaneously have rarely been presented or analyzed. (ii) Research on residual life estimation by fusing multi-source information is rare and needs further study. To fill the gap of the existing research, a multi-source information fusion approach based on the Bayesian theory is proposed to estimate the residual life of Weibull-distributed components of on-orbit satellites by fusing historical lifetime data, degradation data, similar data, and expert information. Both the Bayesian estimate and CI are considered.
The rest of this paper is organized as follows. Multi-source information and the Bayesian model are introduced in
Section 2.
Section 3 contains the determination of prior distributions of multi-source information. In
Section 4, we describe how posterior distributions are obtained and fused after a consistency test, and the residual life is estimated.
Section 5 describes the Monte Carlo simulation study, followed by the validation using an illustrative example in
Section 6. Finally, the paper is concluded in
Section 7.
2. Multi-Source Information and the Bayesian Model
In this section, various kinds of reliability information and the Bayesian method are introduced. The following reliability information can be collected for components of on-orbit satellites according to engineering experience.
- (i).
Field data are collected during the operation of target components, where n represents the sample size, are the failure times of the field data, and are the censored data. It should be noted that the censored data in this paper means the correct censored data.
- (ii).
Historical lifetime data are data for the end of operation of the same kinds of existing products, where p represents the sample size, are the failed data, and are the censored data.
- (iii).
Similar data are the data of similar components, where m denotes the sample size, are the failed data, are the censored data, and ρ is the inheritance factor that reflects the similarity with the target components.
- (iv).
Degradation data are collected from l components during the operation for a single parameter, where () are observed at time .
- (v).
Expert information is provided by expert experience, and usually includes two forms: (a) Point estimation of reliability at time and (b) the lower confidence limit for the reliability at time with confidence level .
There are four major steps to the Bayesian method proposed in this paper: (i) Prior distributions are determined by historical lifetime data, degradation data, similar data, and expert information, which are denoted by (); (ii) Corresponding posterior distributions () are obtained by fusing the field data; (iii) Fusion weights are calculated using the ML-II method, and the joint posterior distribution can be obtained; and (iv) Residual life can be estimated.
5. Simulation Study
This section describes how a Monte Carlo simulation study is conducted to compare the Bayesian estimates and the CI of residual life with the maximum likelihood estimate (MLE). The performance of the Bayesian method and MLE are compared under different parameter settings. Parameter values of , , current time τ and sample size n are necessary for this simulation. The values of the Weibull parameters (, ) are set to (2 × 10−8, 3), (4 × 10−8, 3), and (2 × 10−10, 4), respectively. τ is set to 100, and the sample size n is set to 3, 5, and 10. For convenience, the sample size of the historical lifetime data and the similar data is set to 5. The expert information is the true value of reliability at time τ.
The simulation steps are listed as follows:
- Step 1:
Draw historical lifetime data, similar data, expert information and lifetime data predicted by degradation data from W(, ). Generate field data with size n.
- Step 2:
The Bayesian estimate and 90% CI of the residual life, denoted by , and , can be calculated by Algorithm 1.
- Step 3:
MLEs of the Weibull parameters and can be obtained by field data. Then the point estimate and the 90% CI of the residual life, denoted by and , can be calculated by Equations (59), (61) and (62).
- Step 4:
Repeat Steps 1–3 100 times and compare the collected results using bias, mean absolute error (MAE), and mean square error (MSE) of the point estimate, coverage probability (CP) and the average interval width (AIW) of the CI [
48].
- (i).
The sample size of lifetime data has a remarkable effect on both the Bayesian method and the MLE method. Generally, the bias, MAE, and MSE decrease as the sample size increases. Simultaneously, the CP increases, which means that a more accurate interval can be obtained.
- (ii).
The difference between these two point estimates is gradually eliminated as the sample size of the field data increases. When the sample size is small, the advantage of using Bayesian estimation is obvious. The bias, MAE, and MSE found using Bayesian estimation are apparently smaller than those found using the MLE method, which indicates that the former estimation is more accurate, stable and robust. Also, when the number of failures of the field data is equal to one or zero, MLE is restricted and cannot be used.
- (iii).
Generally, the CP of the Bayesian method is larger than that of the MLE method, indicating that the Bayesian CI is more useful as it fuses various kinds of prior information. Therefore, the simulation results indicate that the multi-source information fusion method could significantly outperform other conventional approaches that are based on any single input [
49].
6. Illustrative Example
As a critical component of a satellite platform, it is meaningful to estimate the residual life of the momentum wheel [
50]. Characterized as being highly reliable and having a long life, the failure of the momentum wheel is rare and failure data are usually nonexistent [
51]. The traditional method for residual life estimation, which is based on failure distribution, is limited. Therefore, prior information is useful and can be fused to estimate the component’s residual life. As a typical electromechanical component, the lifetime of the momentum wheel follows the Weibull distribution. Lifetime data and degradation data were fused by Liu et al. [
52]. To illustrate the method introduced in this paper, we consider the data published in [
52], which include the right censored life data on 15 components. This is shown in
Table 4.
We choose the momentum wheels on S3 as the research objects. The right censored life data on S1 and S2 are the historical life data. Using the Bayesian method, the reliability estimation at current time
months is 0.9954 [
52], which is taken as the expert information. Simultaneously, by analyzing the degradation data, the CDF of the lifetime was obtained, and its life was estimated, (i.e., 537 months). The point estimation and 95% CI were calculated: 512.85 months and [47.9, 1288.0] months, respectively [
52]. By fusing multi-source information, Bayesian estimation and 95% CI of residual life corresponding to each prior information can be calculated. These results are shown in
Table 5.
To guarantee the safety of the data fusion, a consistency test is necessary. We can obtain the 95% Bayesian CI under each prior distribution determined by the corresponding prior information using Algorithm 1. The results are tabulated in
Table 6.
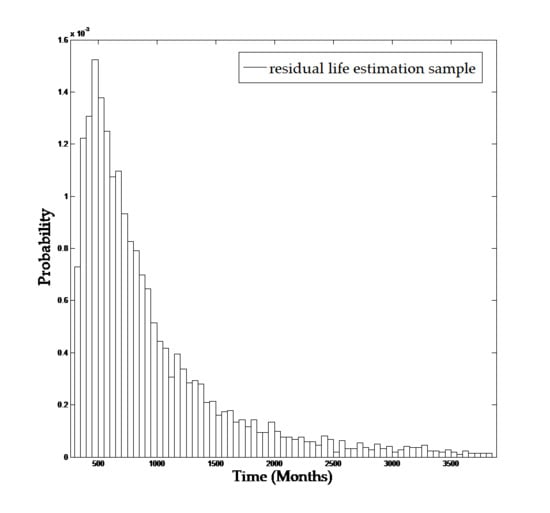
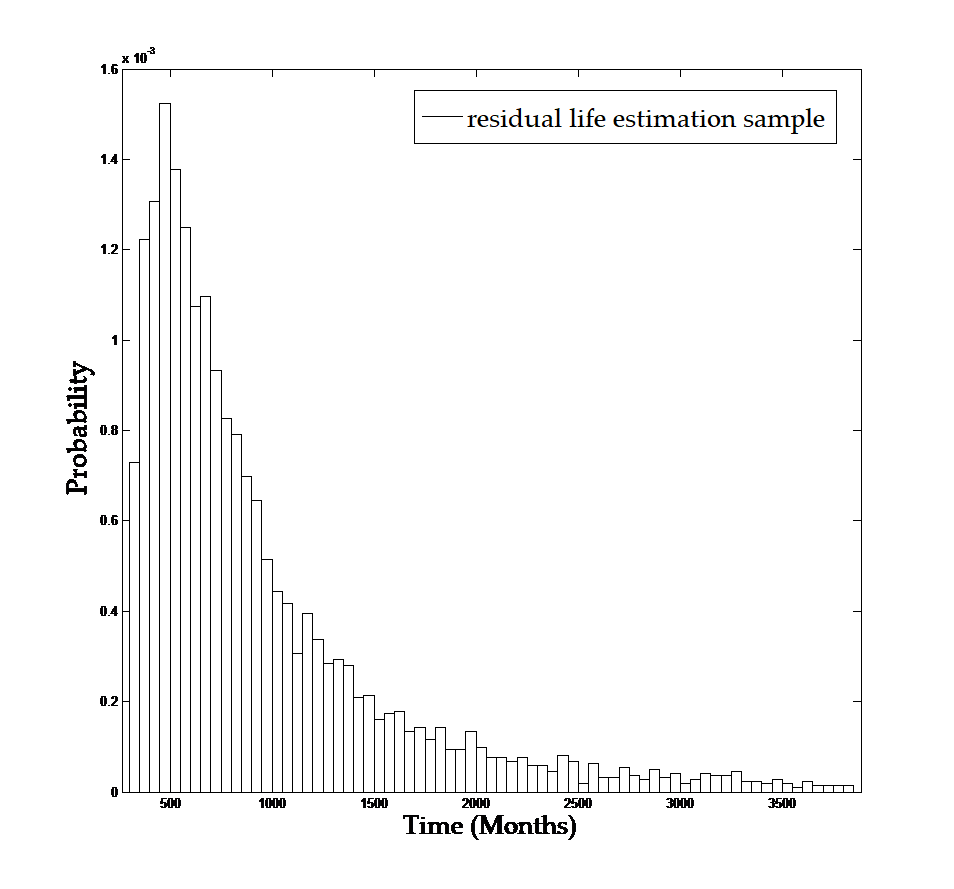
Under the non-informative prior distribution, the point estimation of residual life is 177.5 months. All of them pass the consistency test and can be fused. The sample of residual life drawn by the sample-based method is depicted in
Figure 1.
Bayesian estimation and 95% CI results of the residual life by fusing multi-source information are 533.44 months and [91.87, 1220.79] months, respectively. Compared with the previous results [
52], the effectiveness and the accuracy of the proposed method are validated. By comparing the weights of multi-source information, the lifetime predicted by the degradation data and expert information provides more reliability information because the historical lifetime dataset is extremely small and zero-failure.




{kind=link}
{kind=link}