Fault Diagnosis of Induction Motor Using Convolutional Neural Network

Abstract
:1. Introduction
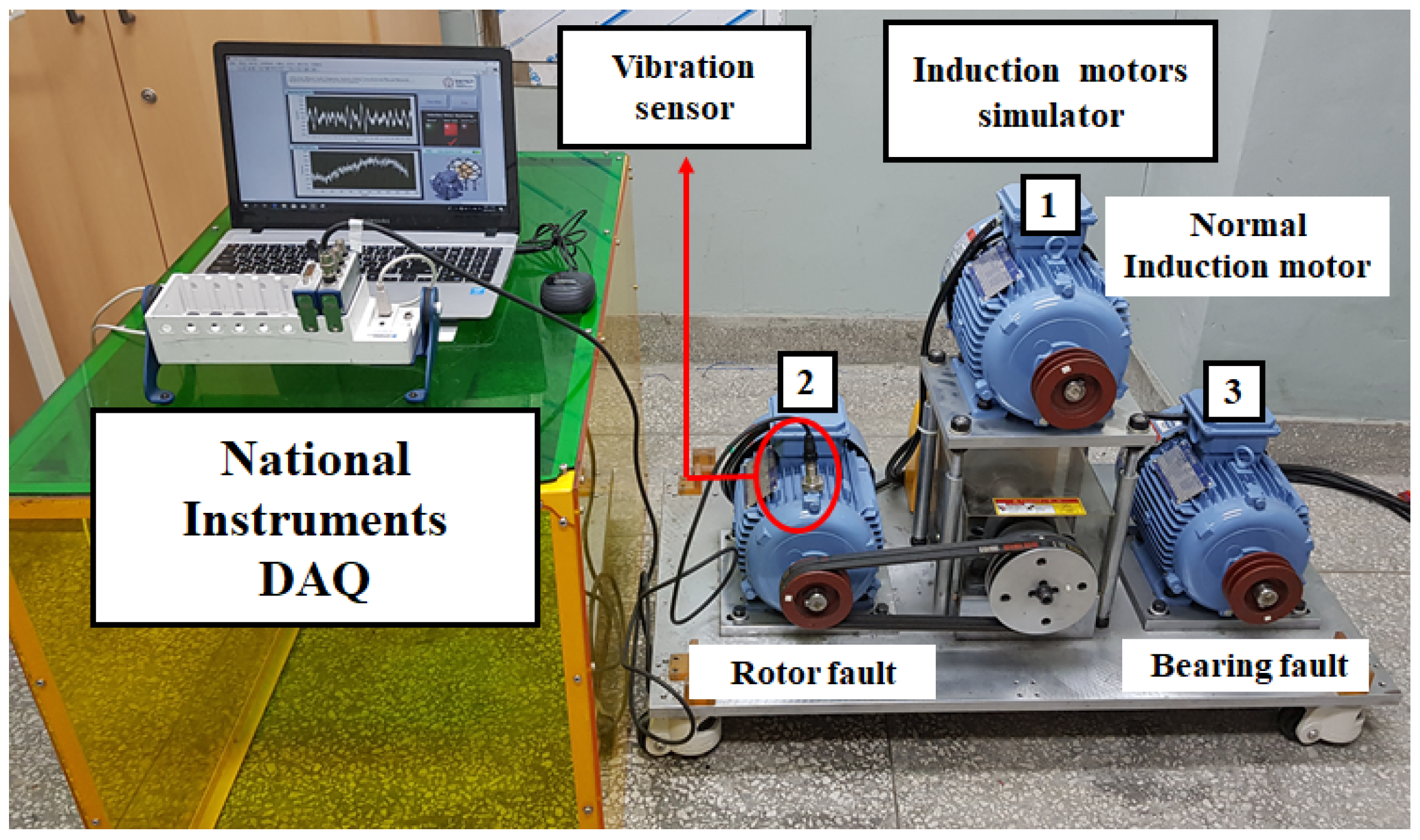
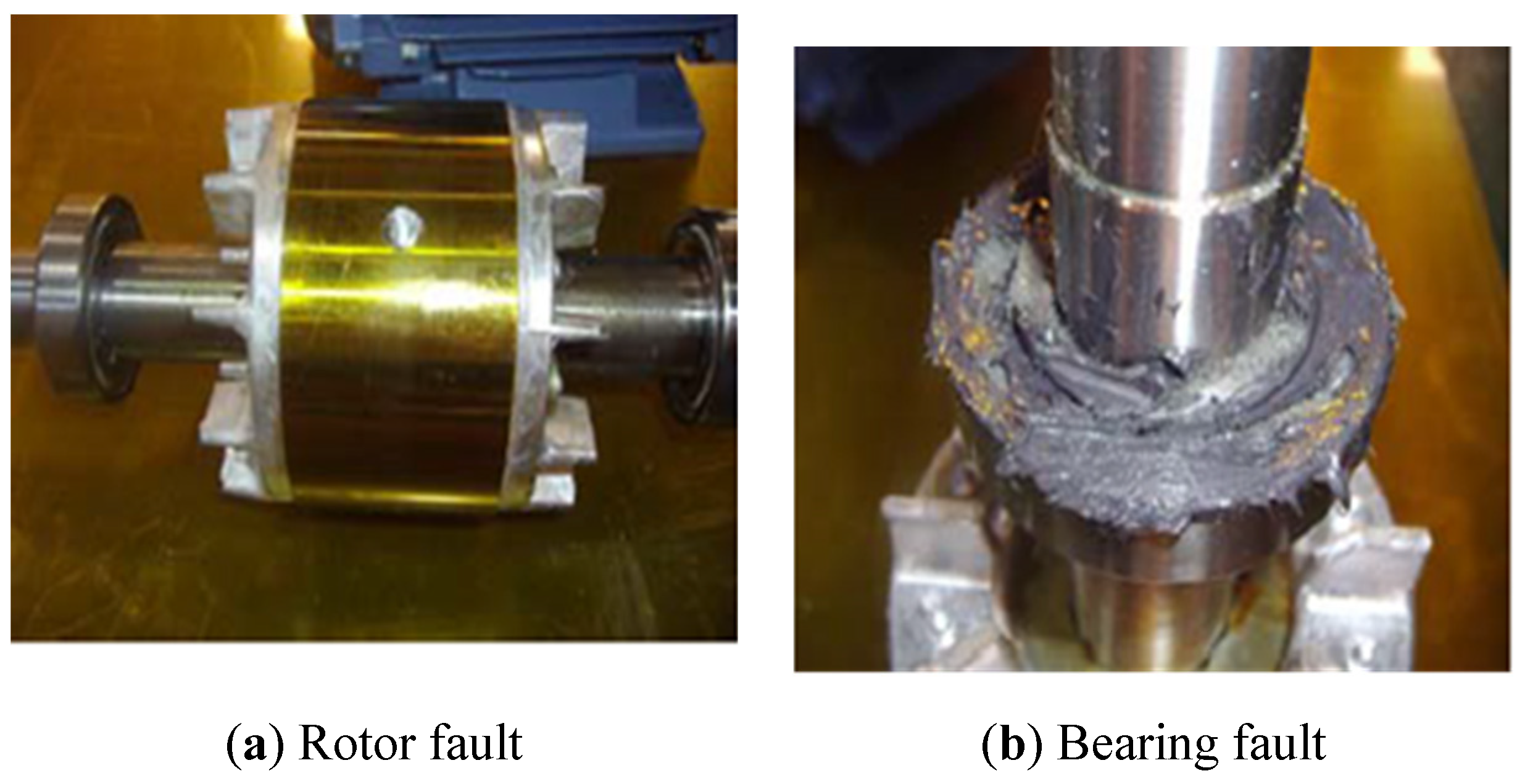
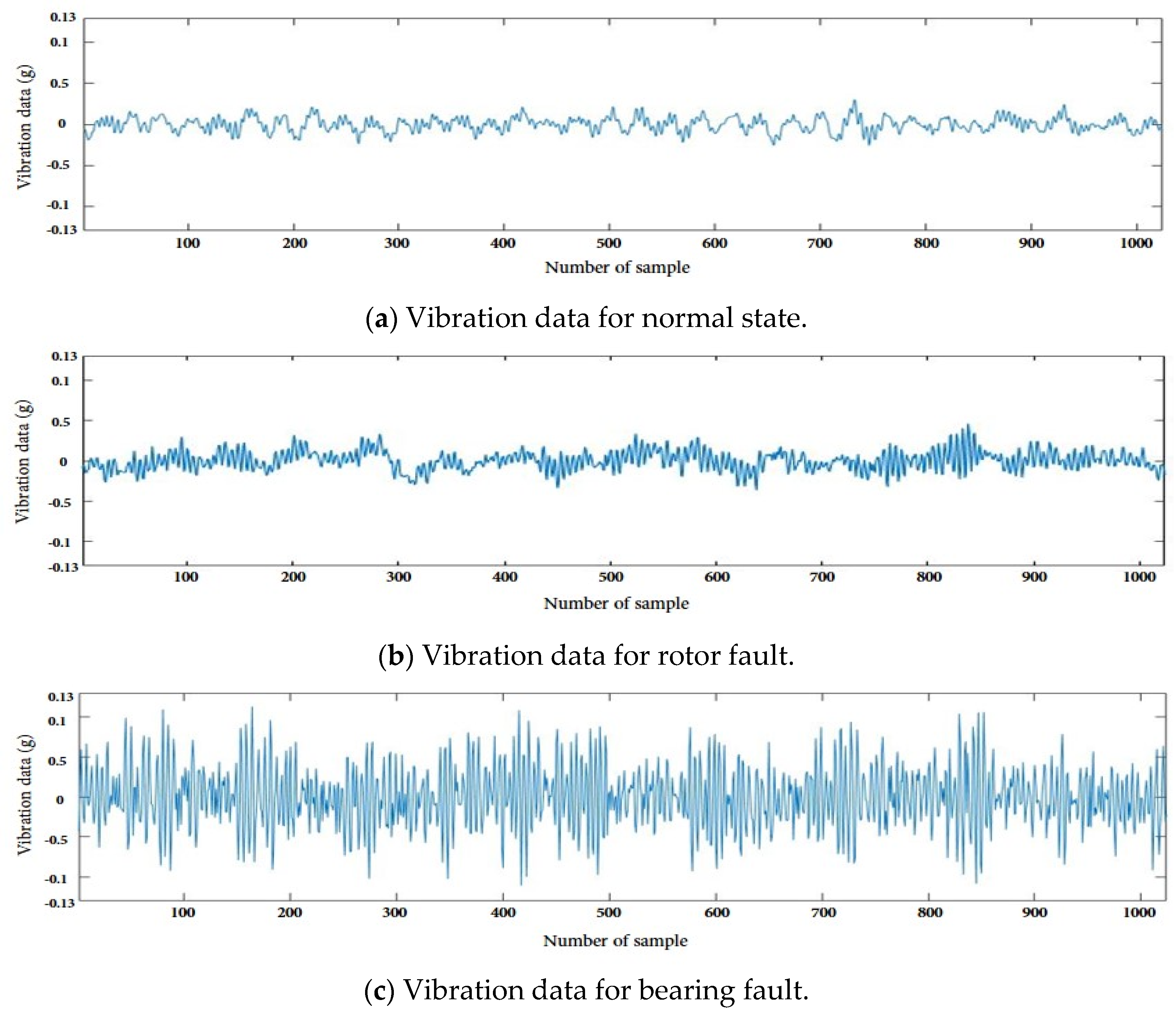
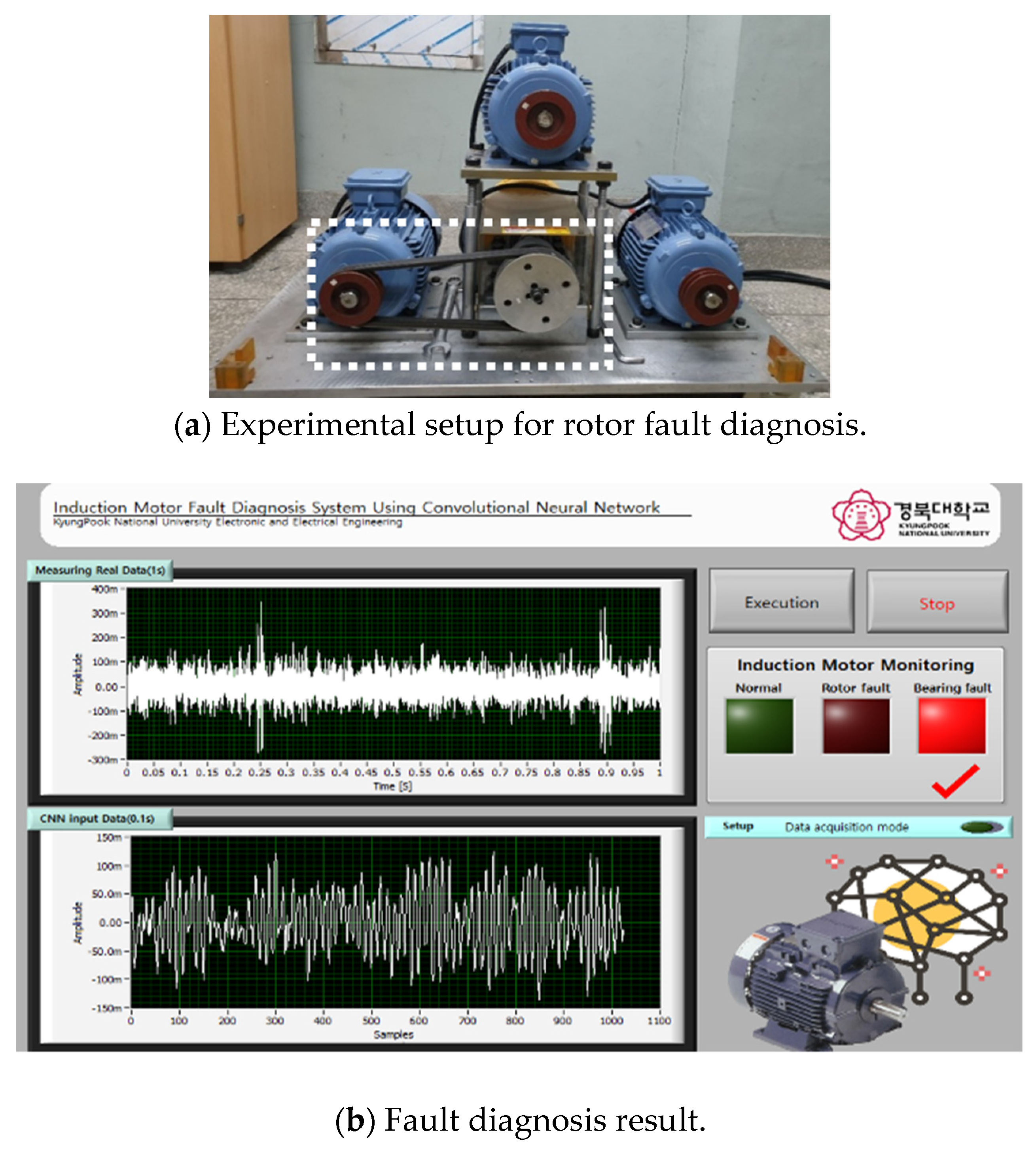
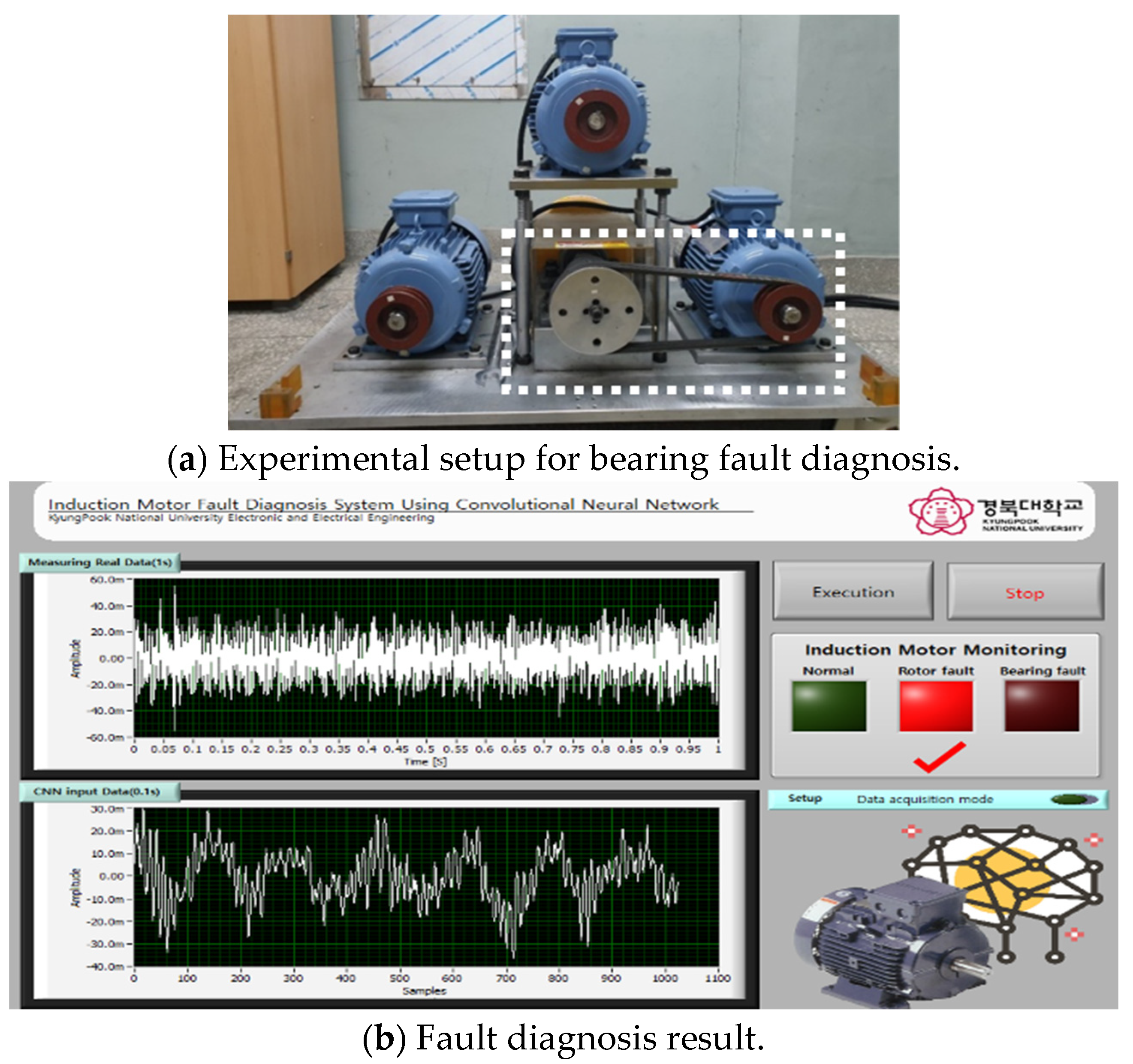
2. Experimental Environment for Fault Diagnosis of Induction Motor
3. Proposed Fault Diagnosis Method for Induction Motors
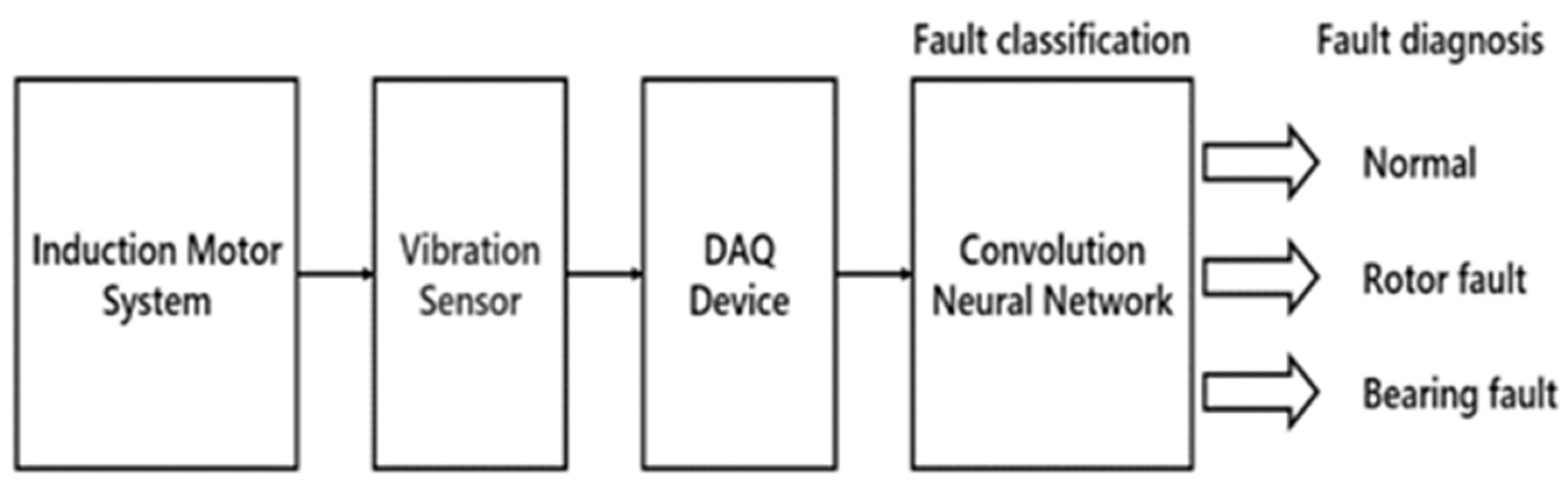
3.1. CNN-Based Fault Diagnosis System
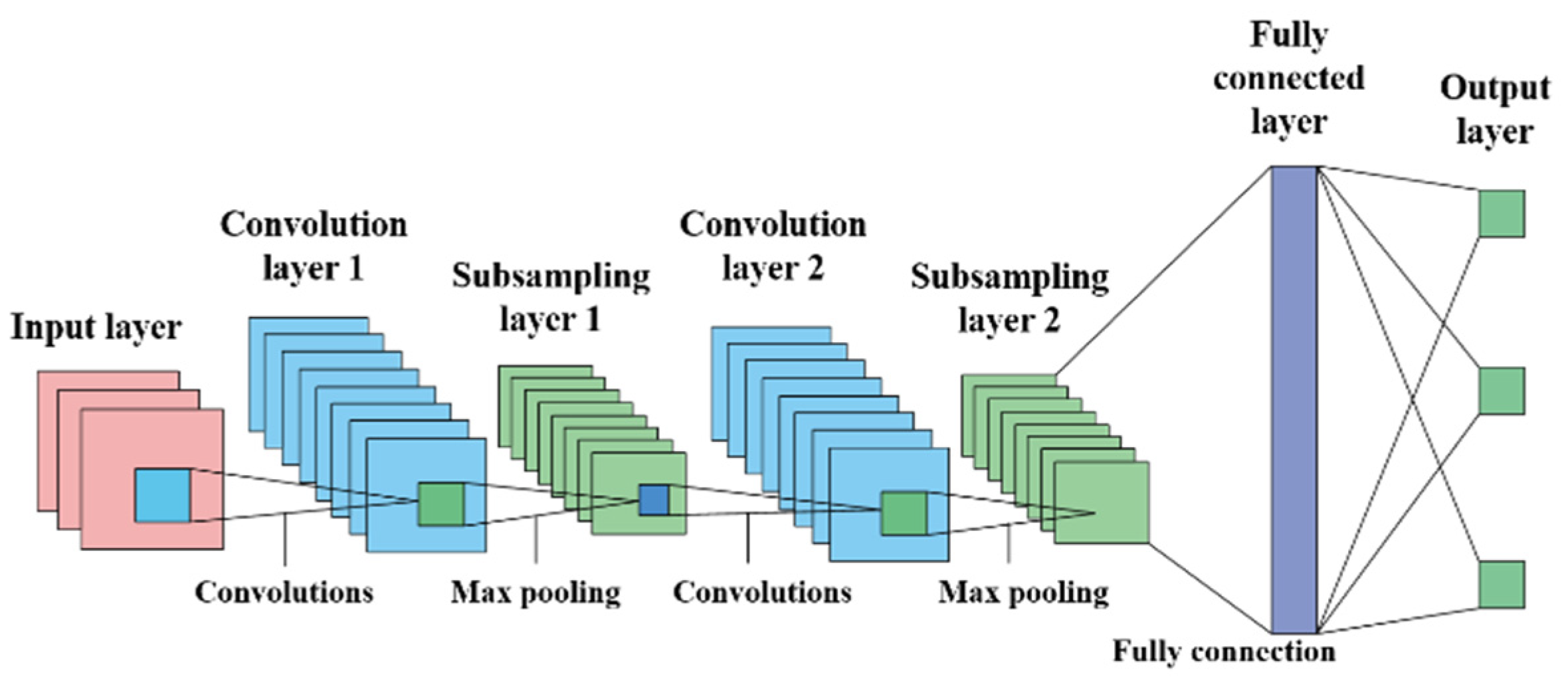
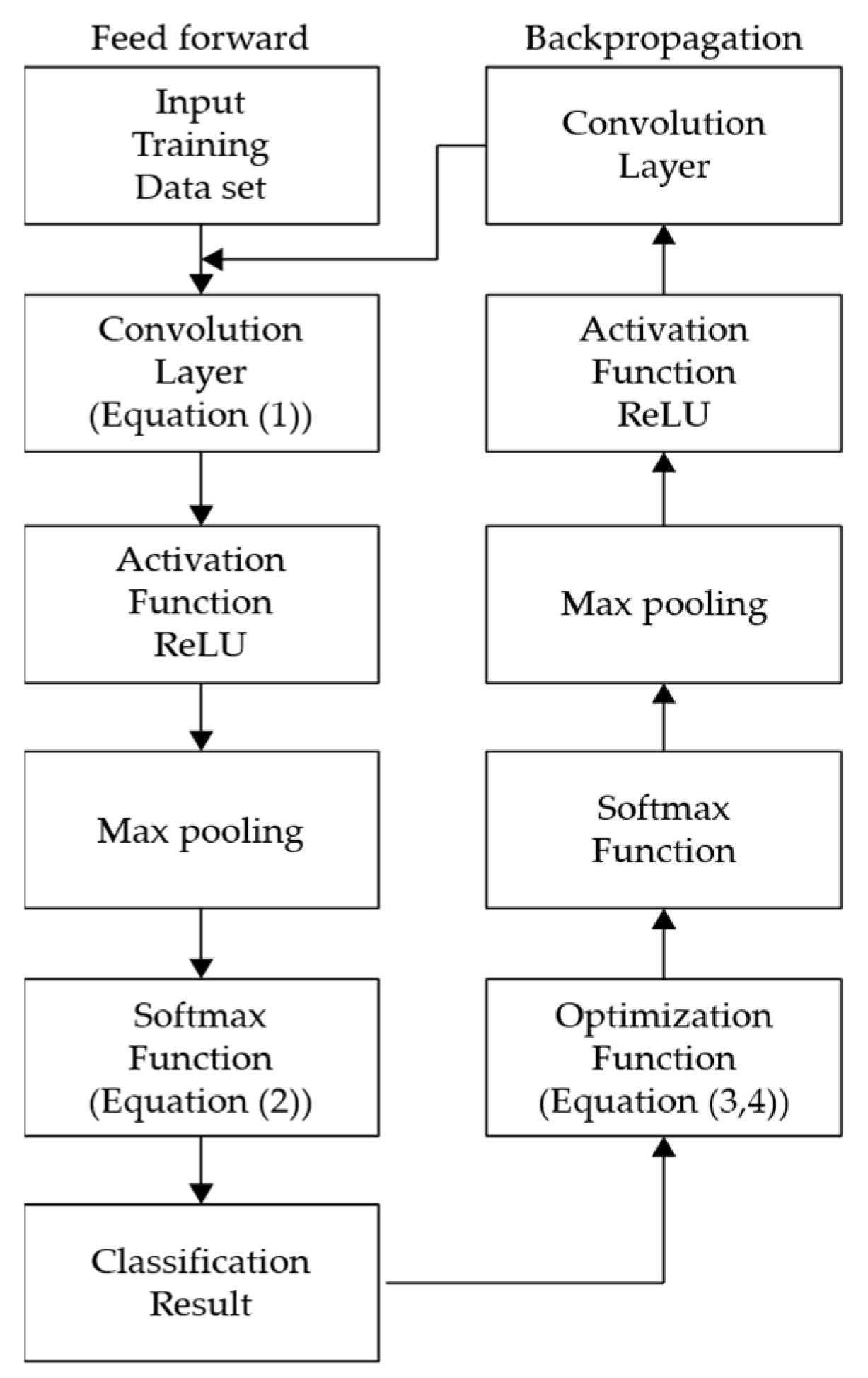
3.2. Convolutional Neural Network
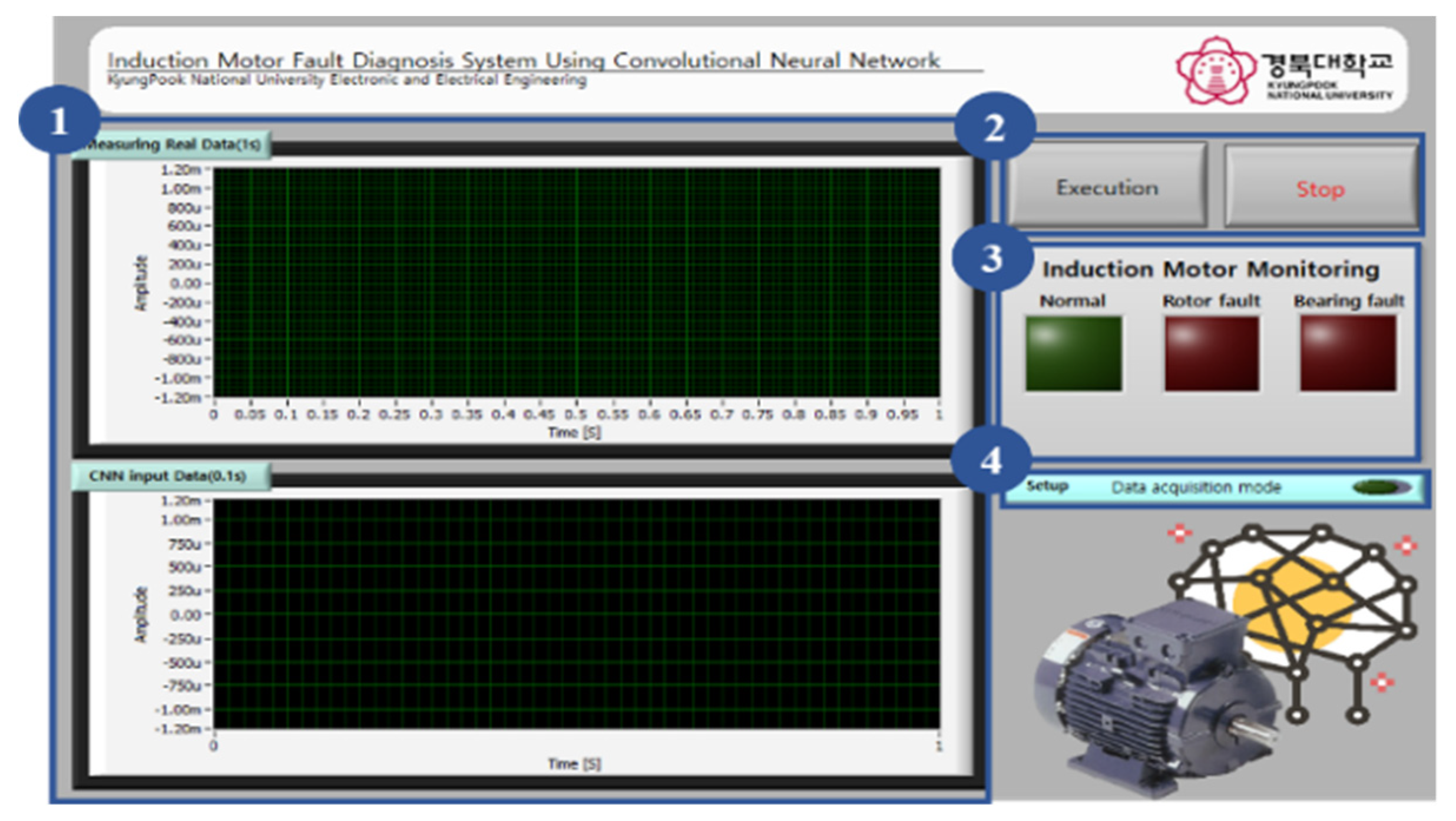
3.3. GUI of Fault Diagnosis System
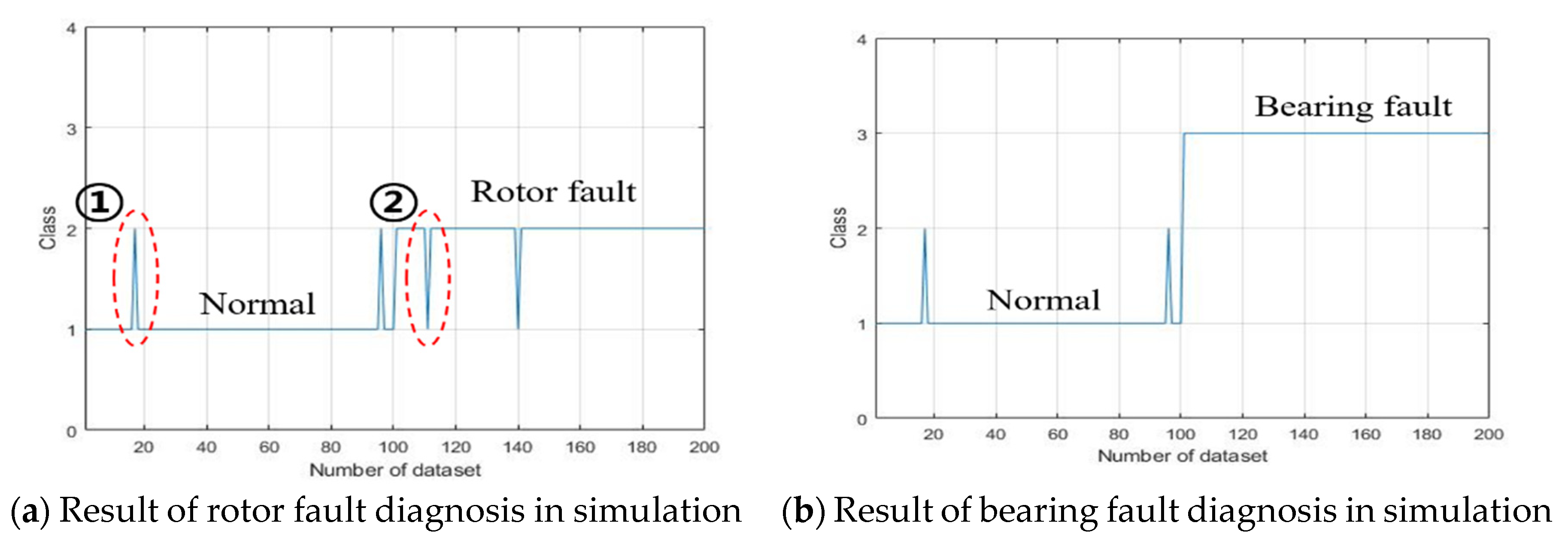
4. Experiment and Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, I.S. Fault Diagnosis System Development of Induction Motors Using Discrete Wavelet Transform and Neural Network. J. Korean Inst. Inf. Technol. 2018, 9, 53–61. [Google Scholar] [CrossRef]
- Lee, I.S. Fault Diagnosis of Induction Motors Using Discrete Wavelet Transform and Artificial Neural Network. In Proceedings of the International Conference on Human-Computer Interaction, Orlando, FL, USA, 9–14 July 2011; pp. 9–14. [Google Scholar]
- Vas, P. Parameter Estimation, Condition Monitoring, and Diagnosis of Electrical Machines; Oxford Science; Oxford University Press: Oxford, UK, 1993. [Google Scholar]
- Li, B.; Chow, M.Y.; Tipsuwan, Y.; Hung, J.C. Neural-network-based motor rolling bearing fault diagnosis. IEEE Trans. Ind. Electron. 2000, 47, 1060–1069. [Google Scholar] [CrossRef]
- Schoen, R.R.; Habetler, T.G.; Kamran, F.; Bartfield, R.G. Motor bearing damage detection using stator current monitoring. IEEE Trans. Ind. Appl. 1995, 31, 1274–1279. [Google Scholar] [CrossRef]
- Schoen, R.R.; Lin, B.K.; Habetler, T.G.; Schlag, J.H.; Farag, S. An unsupervised, on-line system for induction motor fault detection using stator current monitoring. IEEE Trans. Ind. Appl. 1995, 31, 1280–1286. [Google Scholar] [CrossRef]
- Ye, Z.; Wu, B.; Sadeghian, A. Current signature analysis of induction motor mechanical faults by wavelet packet decomposition. IEEE Trans. Ind. Electron. 2003, 50, 1217–1228. [Google Scholar]
- Calis, H.; Cakir, A. Experimental study for sensorless broken bar detection in induction motors. Energy Convers. Manag. 2008, 49, 854–862. [Google Scholar] [CrossRef]
- De Santiago-Perez, J.J.; Rivera-Guillen, J.R.; Amezquita-Sanchez, J.P.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.J.; Dominguez-Gonzalez, A. Fourier transform and image processing for automatic detection of broken rotor bars in induction motors. Meas. Sci. Technol. 2018, 29, 095008. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, Z. Diagnosis of the three-phase induction motor using thermal imaging. Infrared Phys. Technol. 2017, 81, 7–16. [Google Scholar] [CrossRef]
- Polycarpou, M.M.; Vemuri, A.T. Learning methodology for failure detection and accommodation. IEEE Control. Syst. Mag. 1995, 15, 16–24. [Google Scholar]
- Srinivasan, A.; Batur, C. Hopfield/ART-1 neural network-based fault detection and isolation. IEEE Trans. Neural Netw. 1994, 5, 890–899. [Google Scholar] [CrossRef] [PubMed]
- Lee, I.S.; Shin, P.J.; Jeon, G.J. Multiple faults diagnosis of a linear system using ART2 neural networks. J. Inst. Control Robot. Syst. 1997, 3, 244–251. [Google Scholar]
- Lee, I.S. Diagnostic system development for state monitoring of induction motor and oil level in press process system. J. Korean Inst. Intell. Syst. 2009, 19, 706–712. [Google Scholar] [CrossRef]
- Agarap, A.F. An architecture combining convolutional neural network (CNN) and support vector machine (SVM) for image classification. arXiv 2017, arXiv:1712.03541. [Google Scholar]
- Sun, W.; Zhao, R.; Yan, R.; Shao, S.; Chen, X. Convolutional discriminative feature learning for induction motor fault diagnosis. IEEE Trans. Ind. Inform. 2017, 13, 1350–1359. [Google Scholar] [CrossRef]
- Dasgupta, A.; Singh, S. A fully convolutional neural network based structured prediction approach towards the retinal vessel segmentation. In Proceedings of the 2017 IEEE 14th International Symposium on Biomedical Imaging, Melbourne, Australia, 18–21 April 2017; pp. 248–251. [Google Scholar]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Tao, S.; Zhang, T.; Yang, J.; Wang, X.; Lu, W. Bearing fault diagnosis method based on stacked autoencoder and softmax regression. In Proceedings of the 2015 34th Chinese Control Conference, Hangzhou, China, 28–30 July 2015; pp. 6331–6335. [Google Scholar]
- Tieleman, T.; Hinton, G. Lecture 6.5-rmsprop: Divide the gradient by a running average of its recent magnitude. COURSERA Neural Netw. Mach. Learn. 2012, 4, 26–31. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Number | HL105AL202T1 |
|---|---|
| Rated Power | 2.2 Kw (3 HP) |
| Rated Current | 8.6/5.0 A |
| Rated Speed | 1730 rpm |
| Frequency | 60 Hz |
| Voltage | 3 Phase 380 V |
| Induction Motor State | Number of Learning Datasets | Number of Test Datasets |
|---|---|---|
| Normal | 200 | 100 |
| Rotor fault | 200 | 100 |
| Bearing fault | 200 | 100 |
| Total | 600 | 300 |
| Test Data Type | Classification Results | ||
|---|---|---|---|
| Normal | Rotor Fault | Bearing Fault | |
| Normal | 98% | 2% | 0% |
| Rotor fault | 2% | 98% | 0% |
| Bearing fault | 0% | 0% | 100% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.-H.; Pack, J.-H.; Lee, I.-S. Fault Diagnosis of Induction Motor Using Convolutional Neural Network. Appl. Sci. 2019, 9, 2950. https://doi.org/10.3390/app9152950
Lee J-H, Pack J-H, Lee I-S. Fault Diagnosis of Induction Motor Using Convolutional Neural Network. Applied Sciences. 2019; 9(15):2950. https://doi.org/10.3390/app9152950
Chicago/Turabian StyleLee, Jong-Hyun, Jae-Hyung Pack, and In-Soo Lee. 2019. "Fault Diagnosis of Induction Motor Using Convolutional Neural Network" Applied Sciences 9, no. 15: 2950. https://doi.org/10.3390/app9152950
APA StyleLee, J.-H., Pack, J.-H., & Lee, I.-S. (2019). Fault Diagnosis of Induction Motor Using Convolutional Neural Network. Applied Sciences, 9(15), 2950. https://doi.org/10.3390/app9152950