Algorithm Development for the Non-Destructive Testing of Structural Damage




Abstract
1. Introduction
2. Damage Detection Using a Machine Learning Approach
2.1. Support Vector Machine
2.2. Developed Support Vector Machine
- In the training phase, perform the SVM training.
- Use Equation (8) to find the misclassified data (MD).
- Investigate the existence of misclassified data maintained in a MD structure; if the MD includes the data, the CL is computed through Equation (9) for each member of MD; otherwise the normal SVM procedure is continued.
- In the testing phase, compute the self-advised weights of each xk in the test set.
- For each xk in the test set, the absolute values of the SVM decision values are computed, and normalized or scaled to [0,1].
- The SVM labelling is followed, based on the conditions in Equation (14). The normal SVM labelling is performed if SW (xk) < decision value (xk).
3. Damage Visualization
3.1. Developed Image Processing Algorithms
3.1.1. Pre-Processing
3.1.2. Cluster Analysis
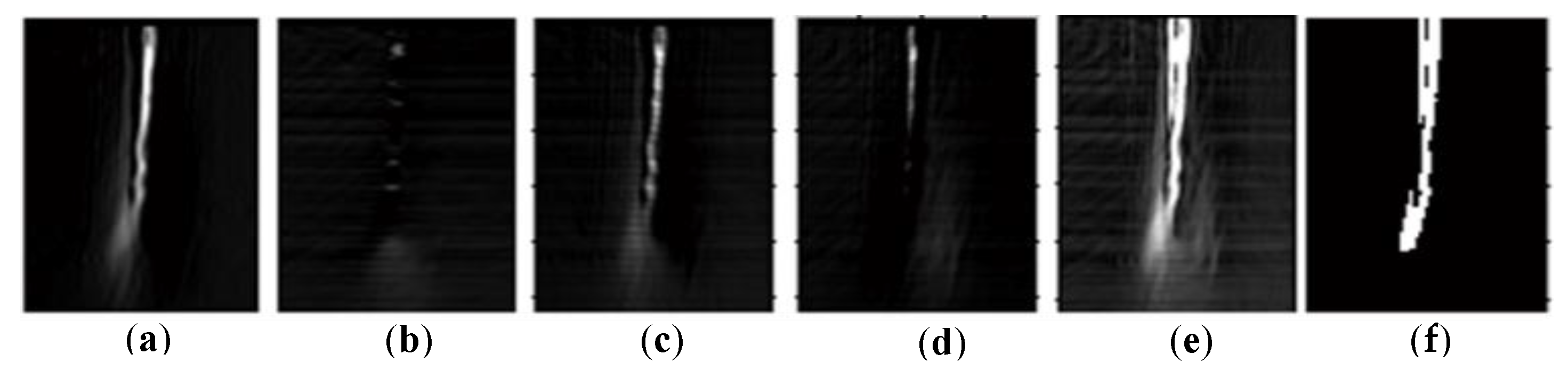
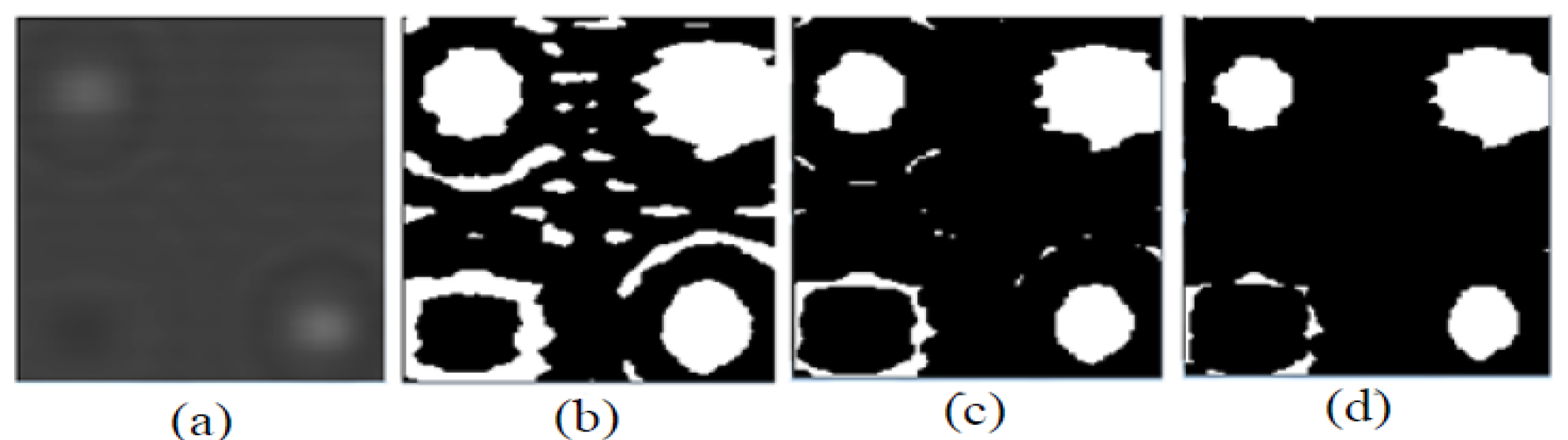
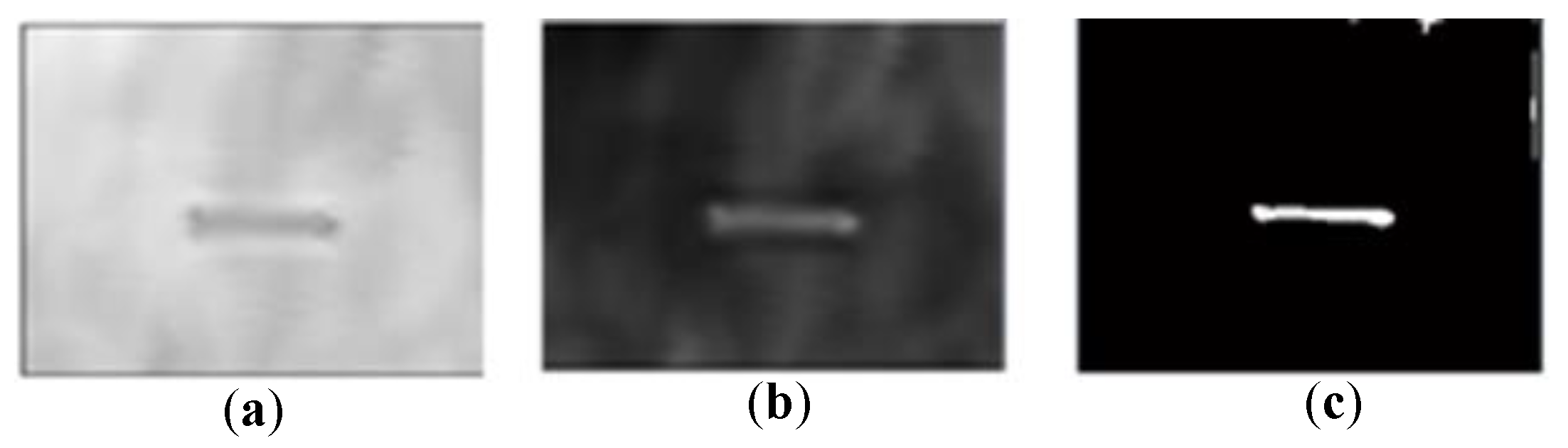
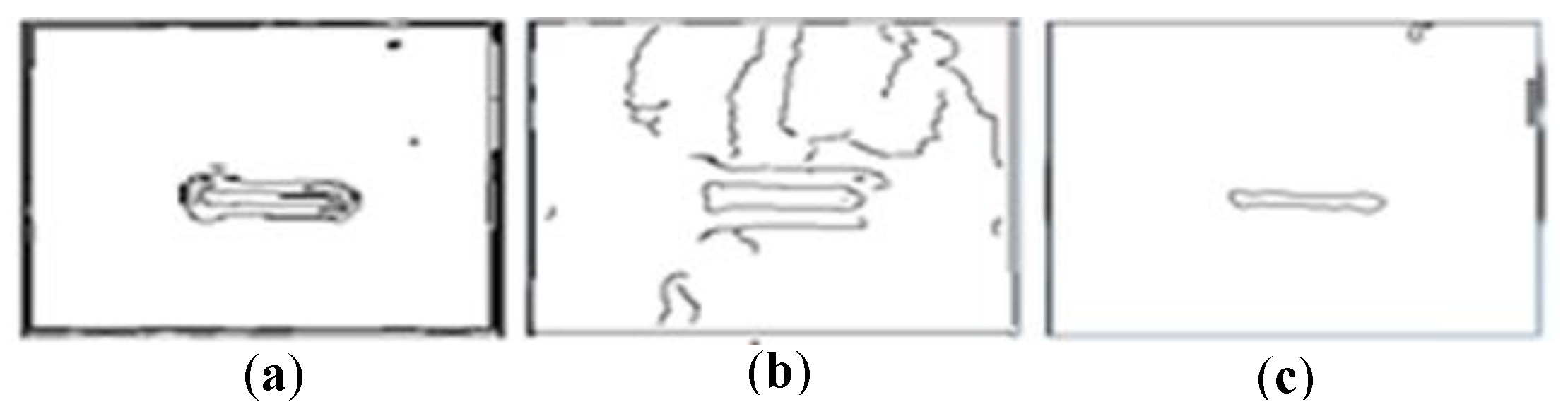
3.1.2.1. Segmentation of Steel Plate (SSP) Images
| Pseudocode 1. The proposed FT-based algorithms for defect segmentation in microwave imaging. |
| Input: Phase and Magnitude |
| Output: True Target Segmentation |
| 1. Pre-processing of SP images as in Section 1. |
| 2. Computation of the derivative of the input microwave image as f′(x) to identify the direction of the maximum changes: |
| 3. Consideration of the horizontal, vertical, and diagonal filters based on Prewitt approximation in four directions: These filters find horizontal, vertical, and diagonal edges in an image while smoothing the results. |
| 4. Assuming that Px, Py, Pd1, and Pd2 as the grey values produced by applying the above filters to an image, the gradient magnitude is computed by: |
| 5. Computing the threshold value of the image by Otsu’s thresholding method. |
| 6. Generating the binary image that contains edges by only applying the threshold value. |
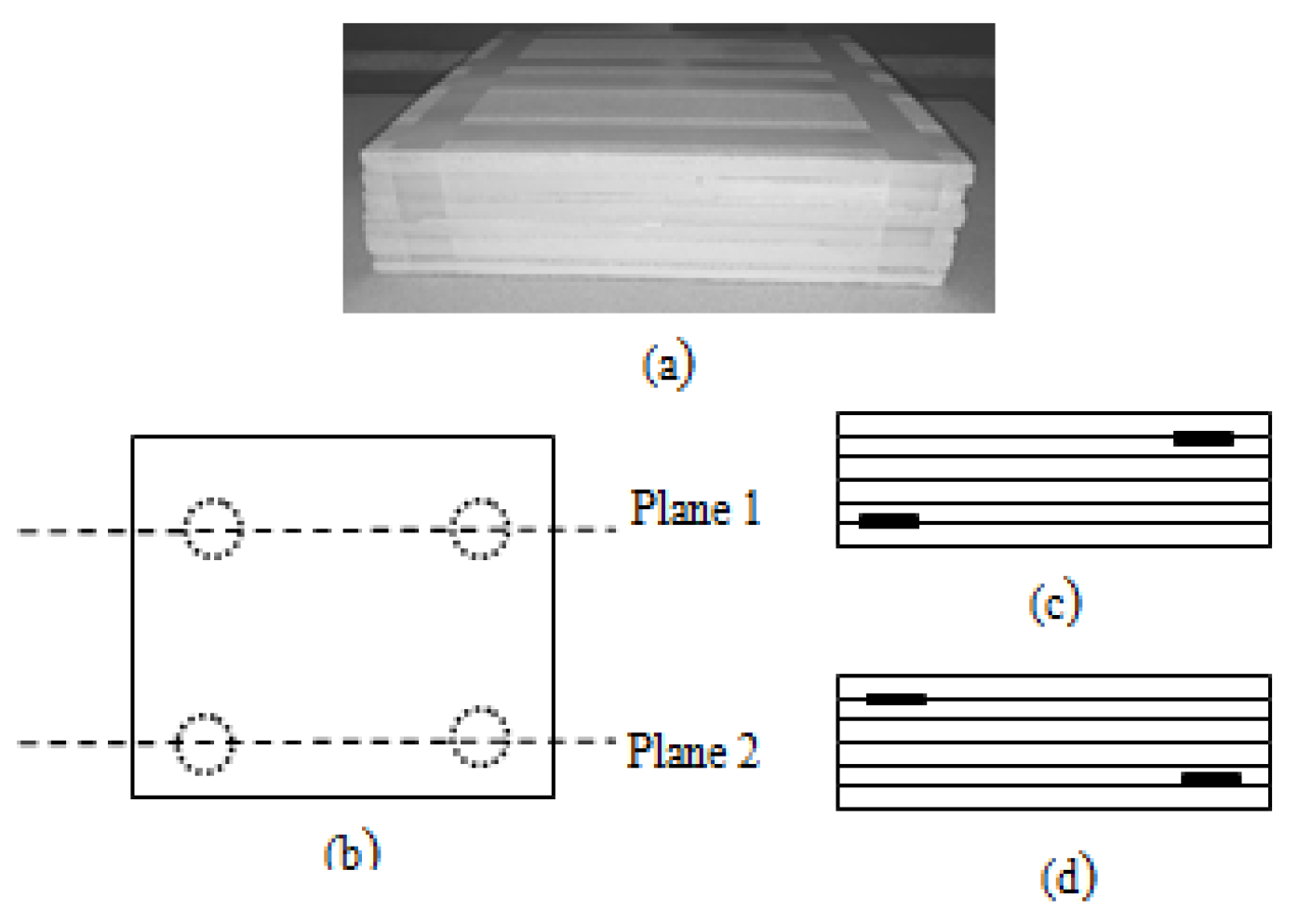
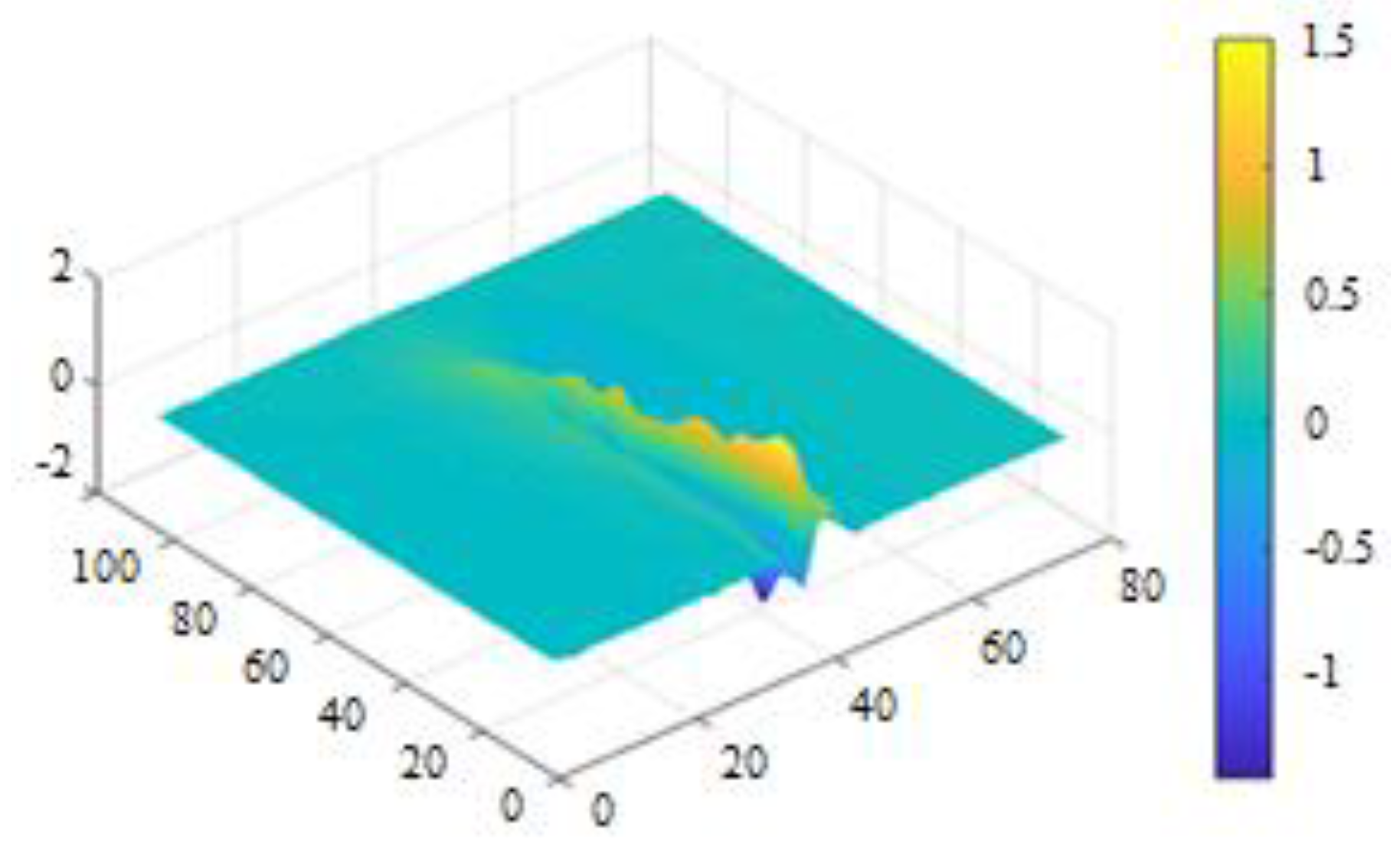
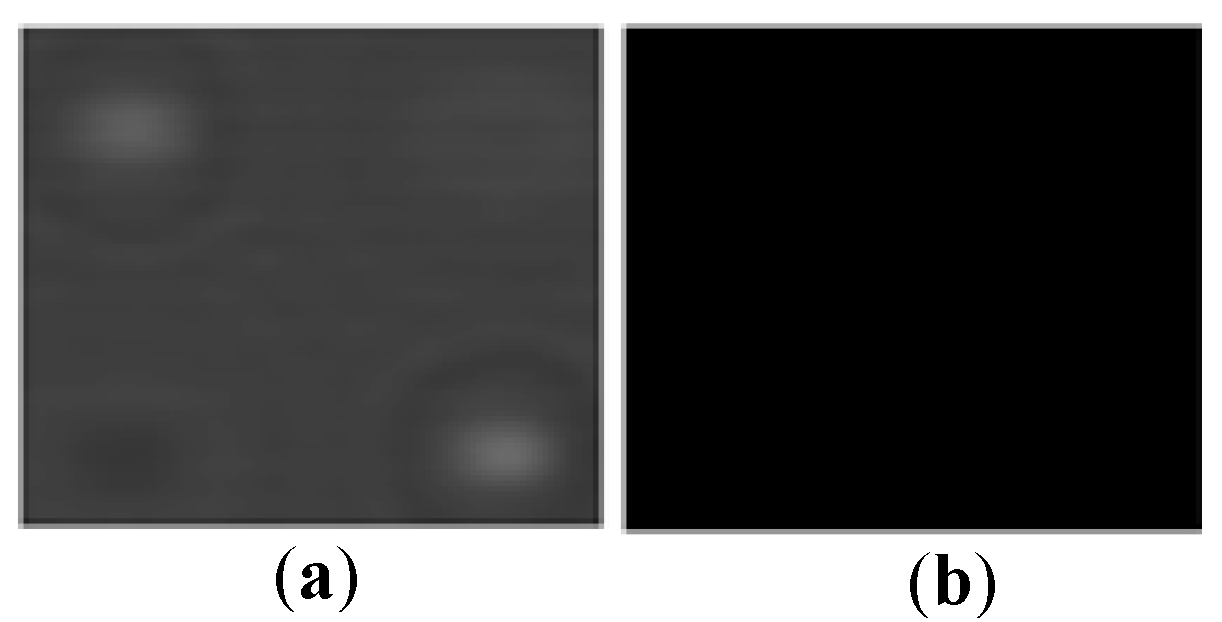
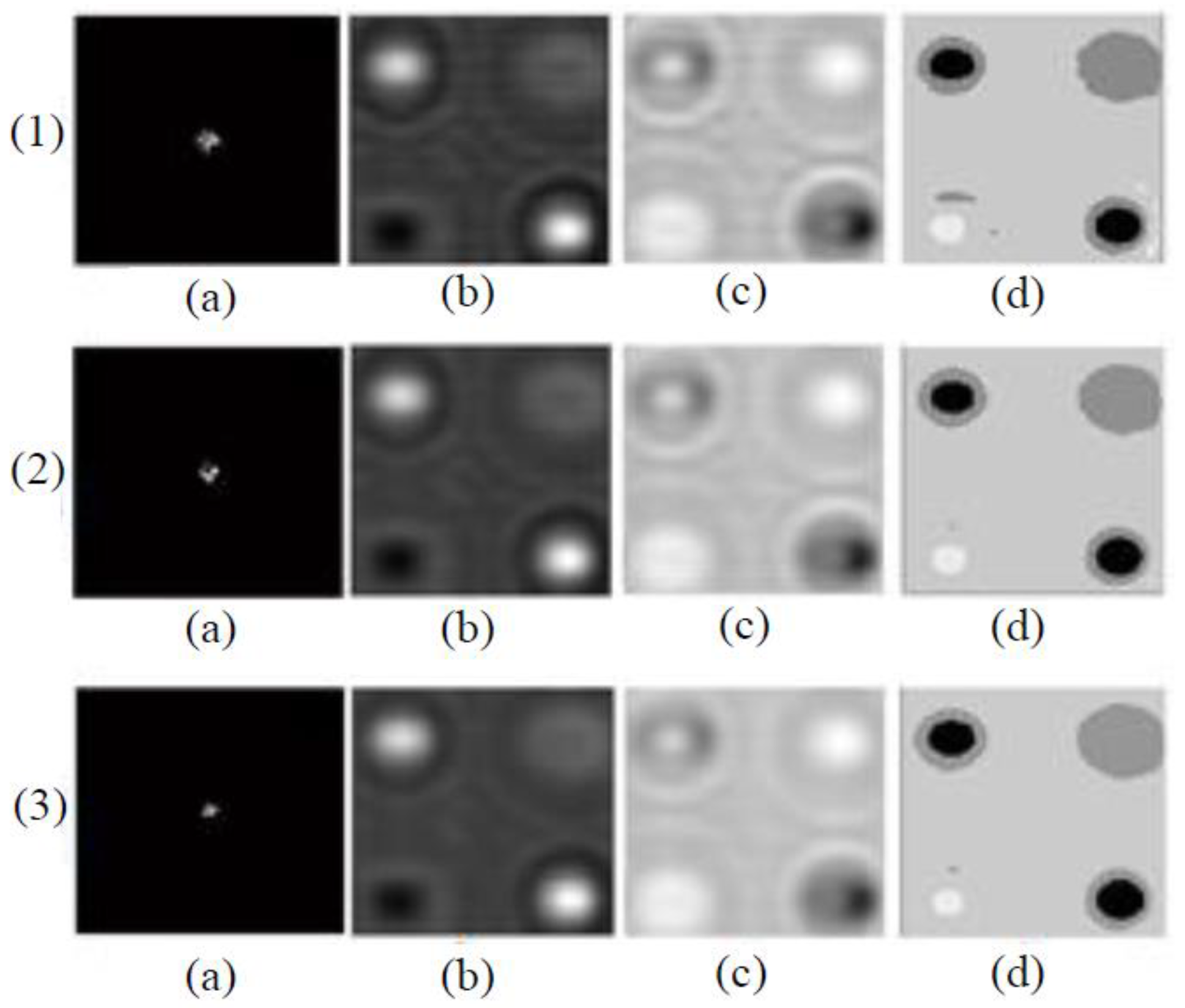
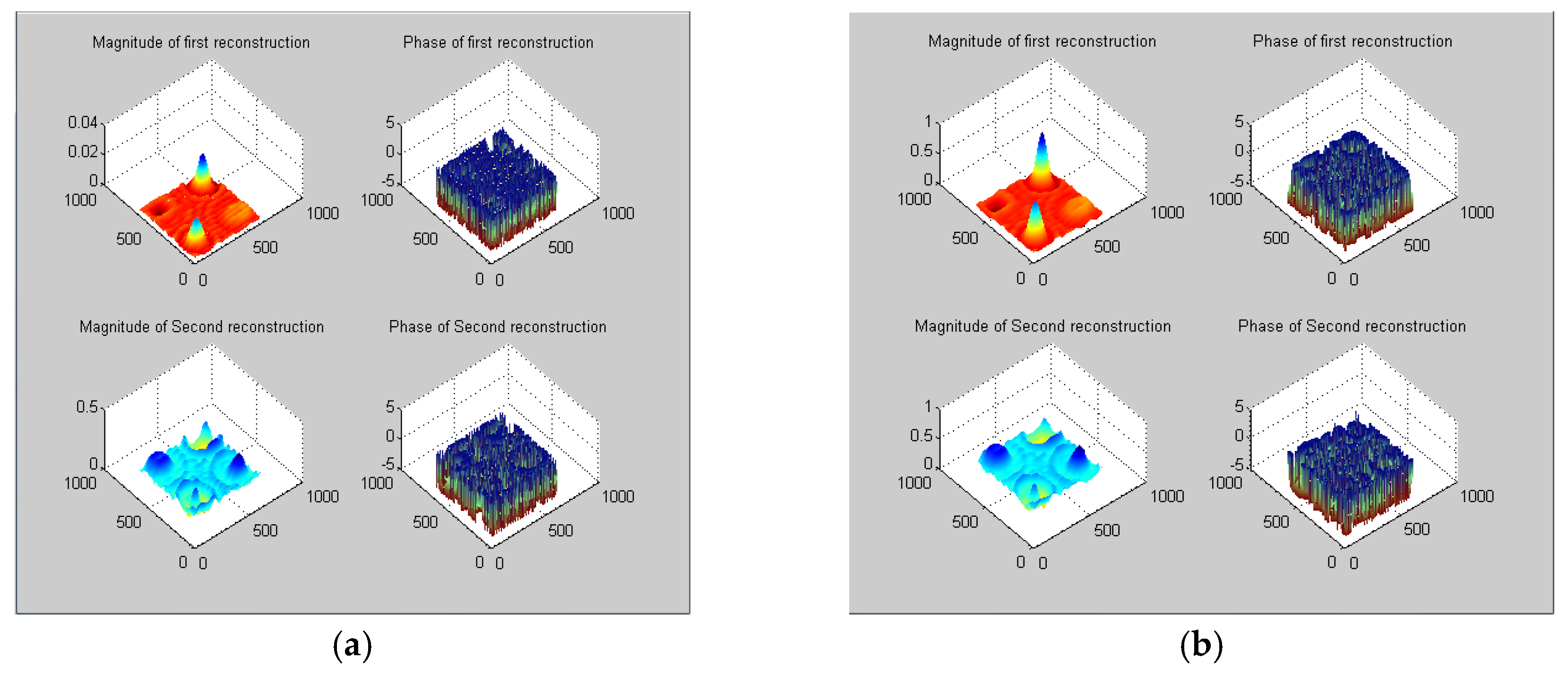
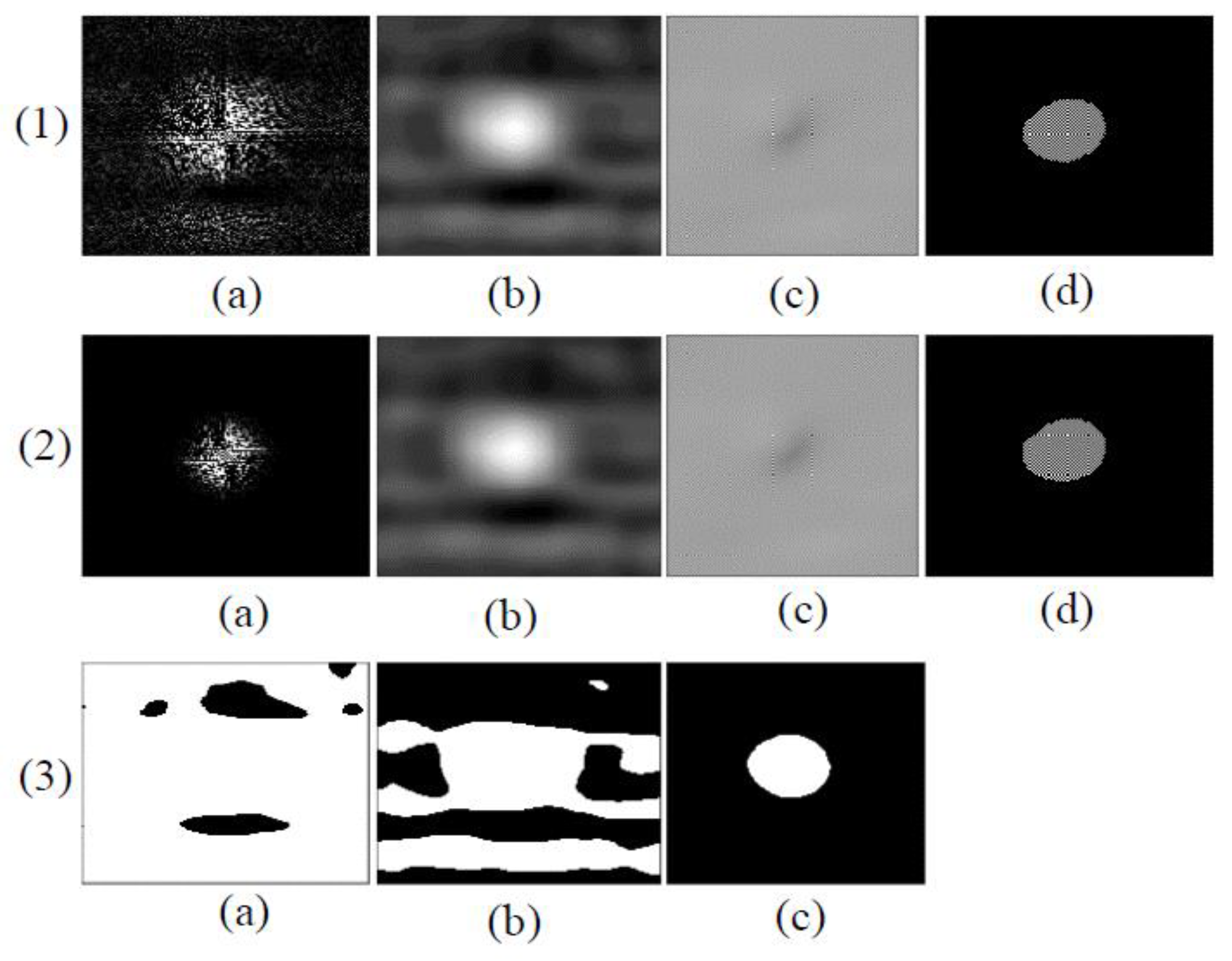
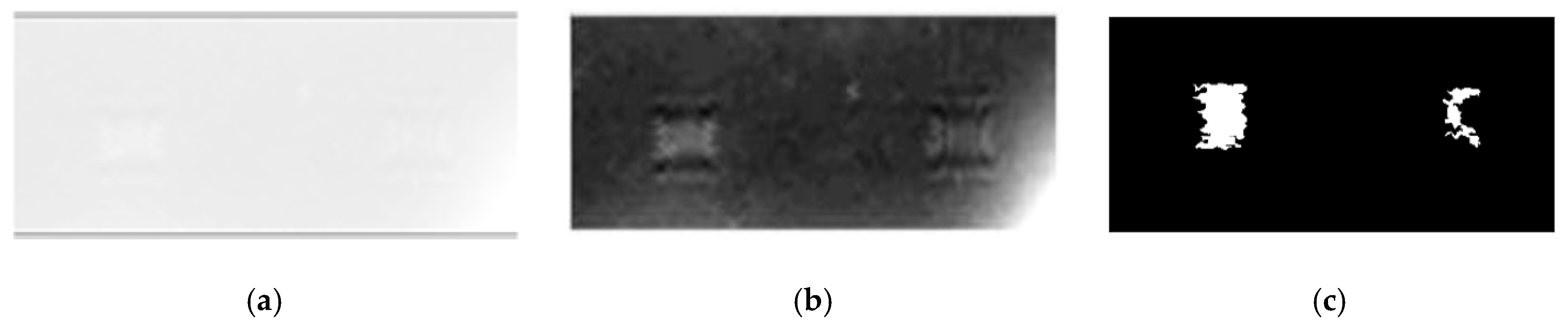
3.1.2.2. Segmentation of Composite Material (SCM) Images
| Pseudocode 2. The proposed FT-based algorithms for defect segmentation in microwave imaging. |
| Input: Phase and Magnitude |
| Output: True Target Segmentation |
|
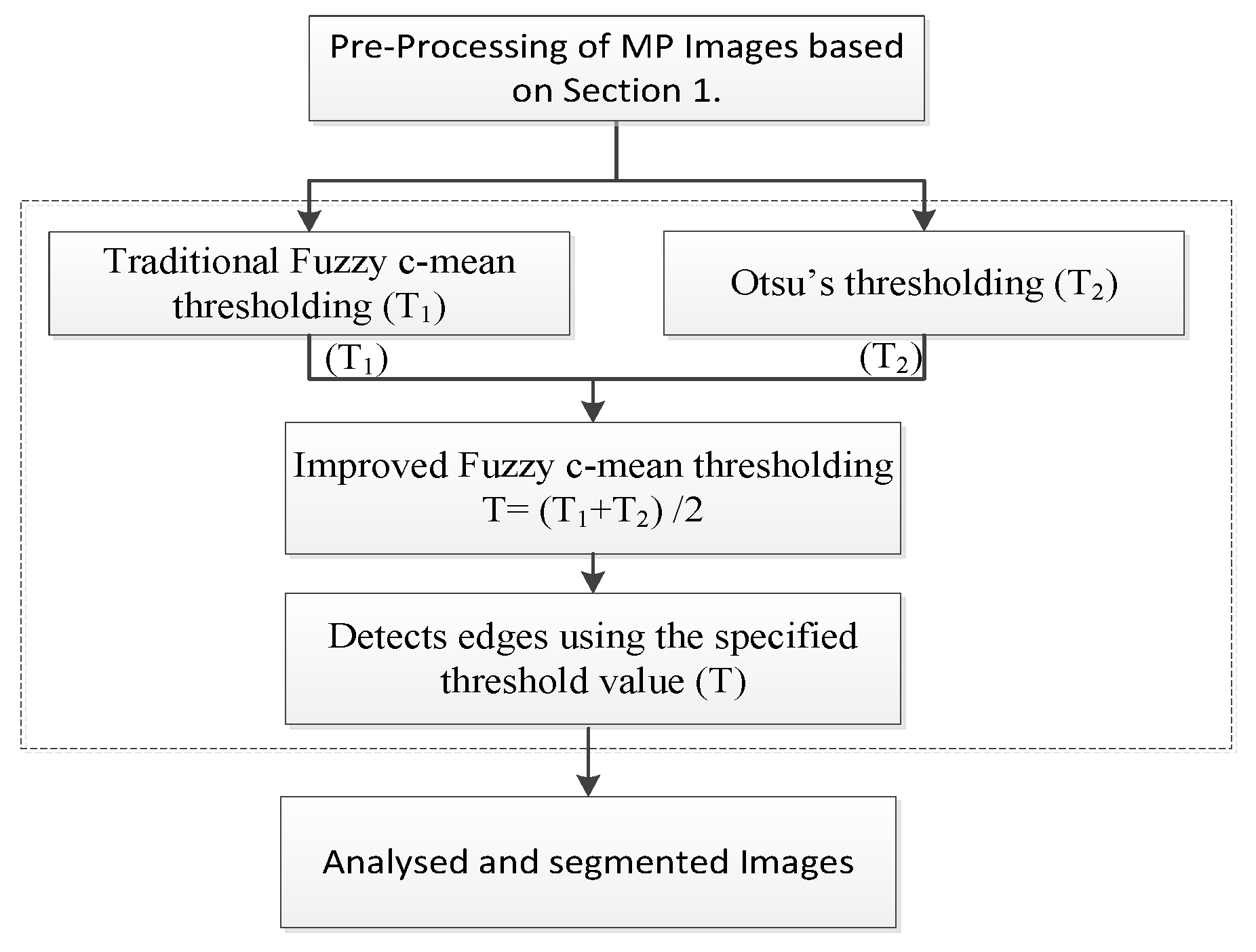
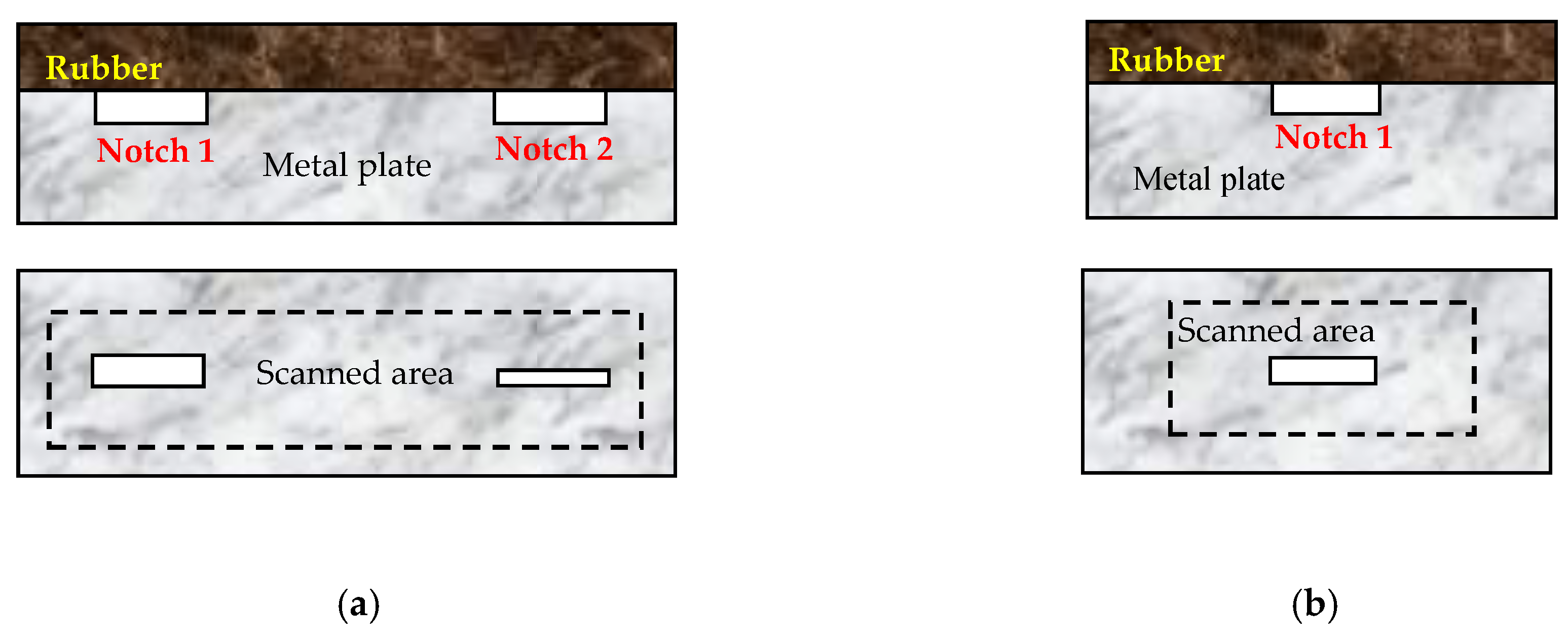
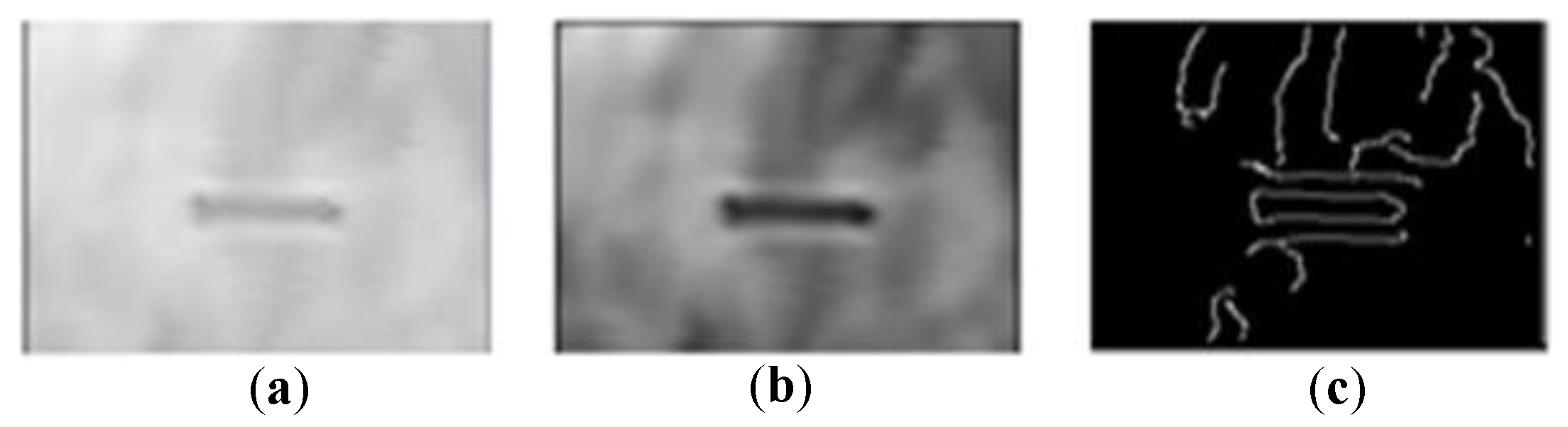
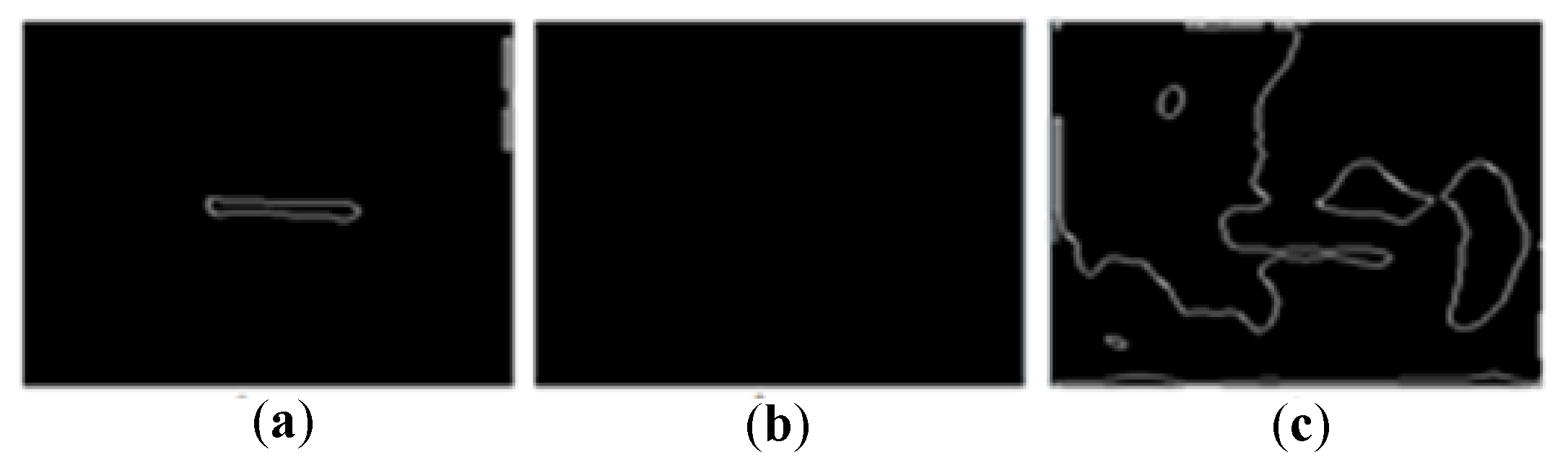
3.1.2.3. Segmentation of Metal Plate (SMP) Images
4. Experimental Setup
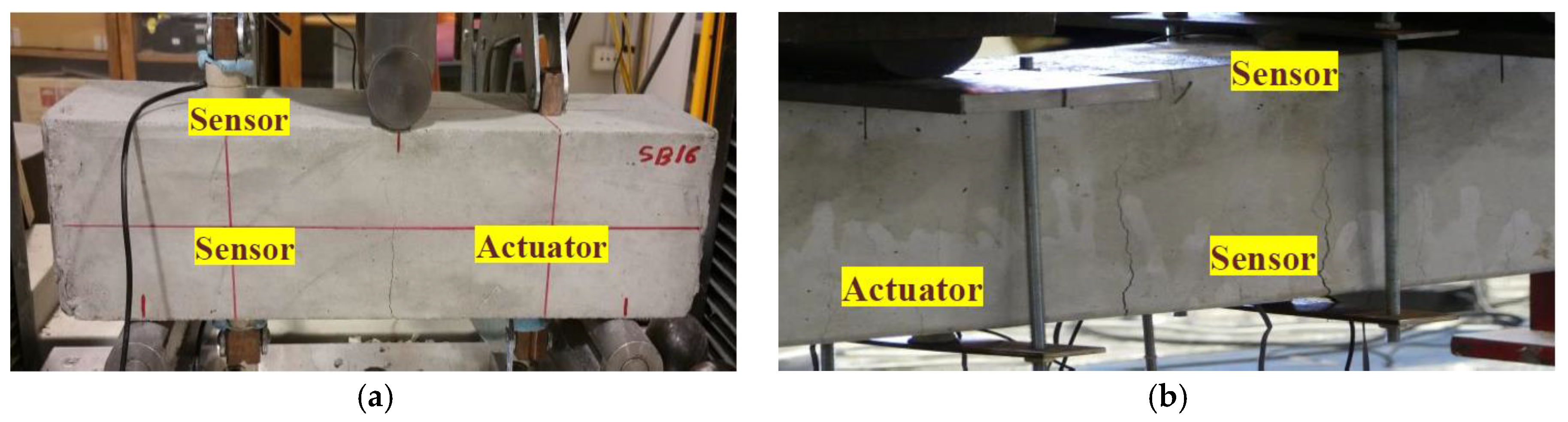
4.1. ML-Based Damage Detection for Concrete and RC Beams
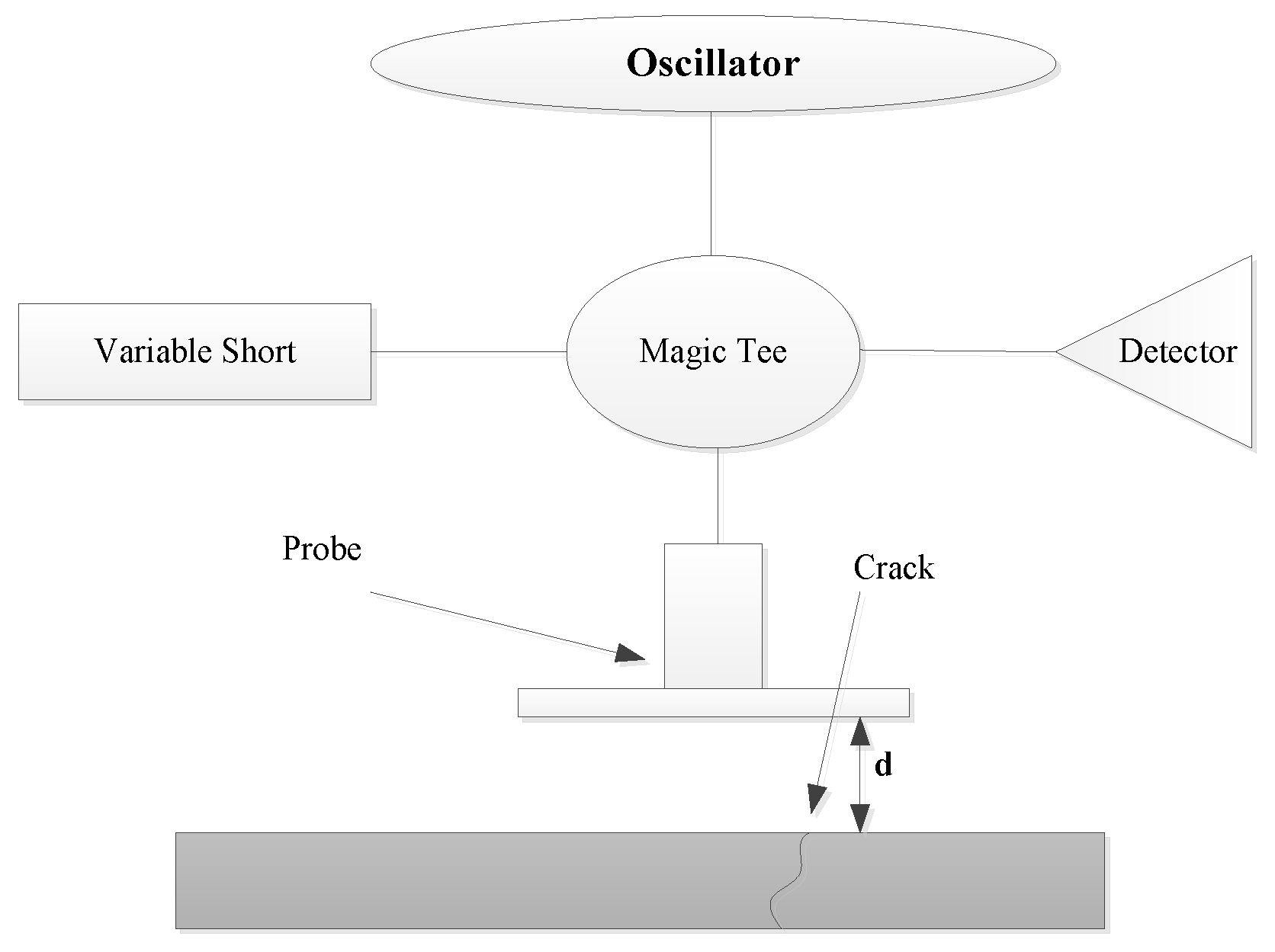
4.2. Microwave Imaging for Damage Detection
5. Results and Discussion
5.1. Estimating the Performance Indicator for Traditional and Developed SVM
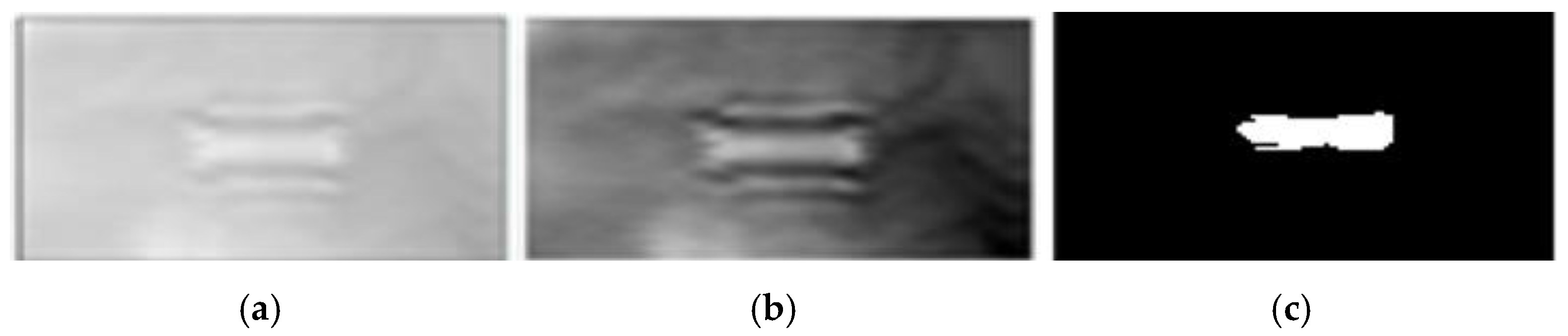
5.2. Evaluating the Results of the Proposed SSP Algorithm
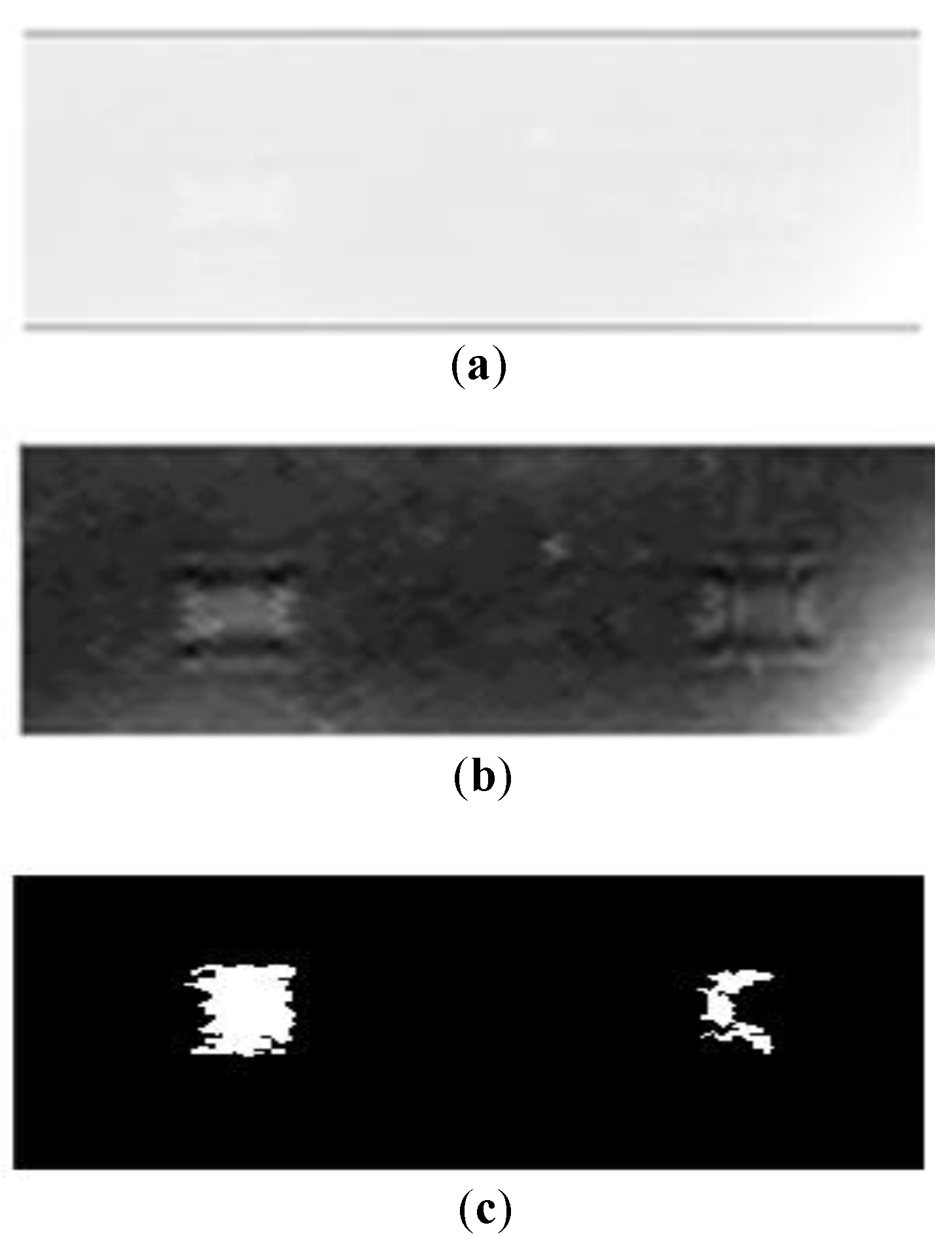
5.3. Evaluating Results for the Proposed SCM Algorithms
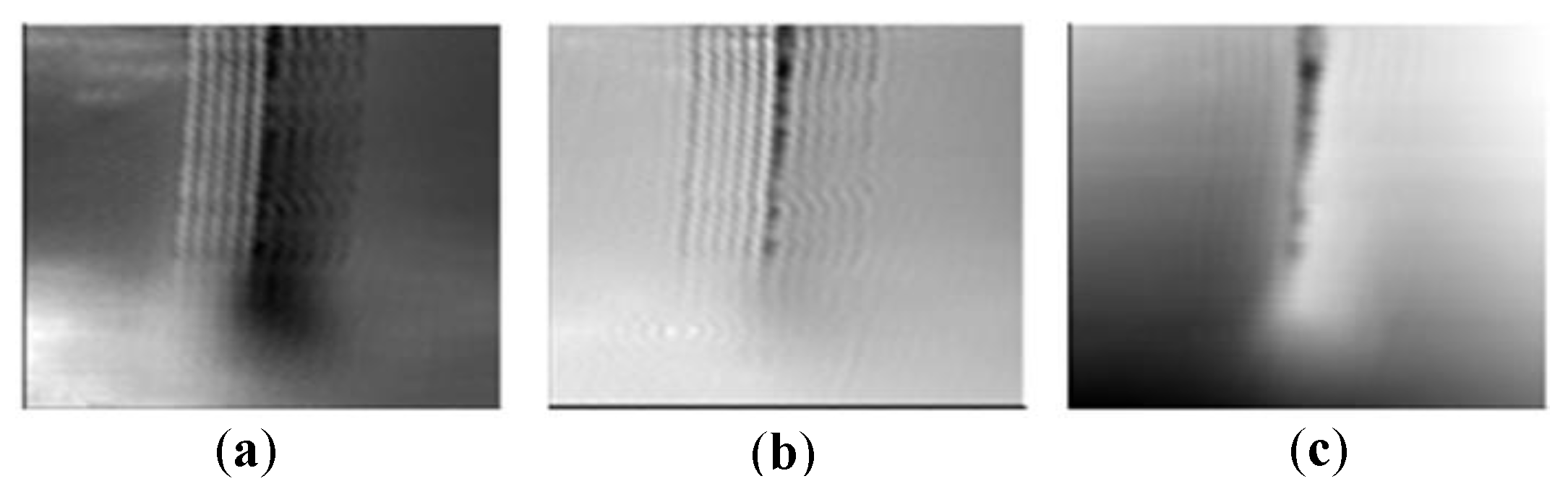
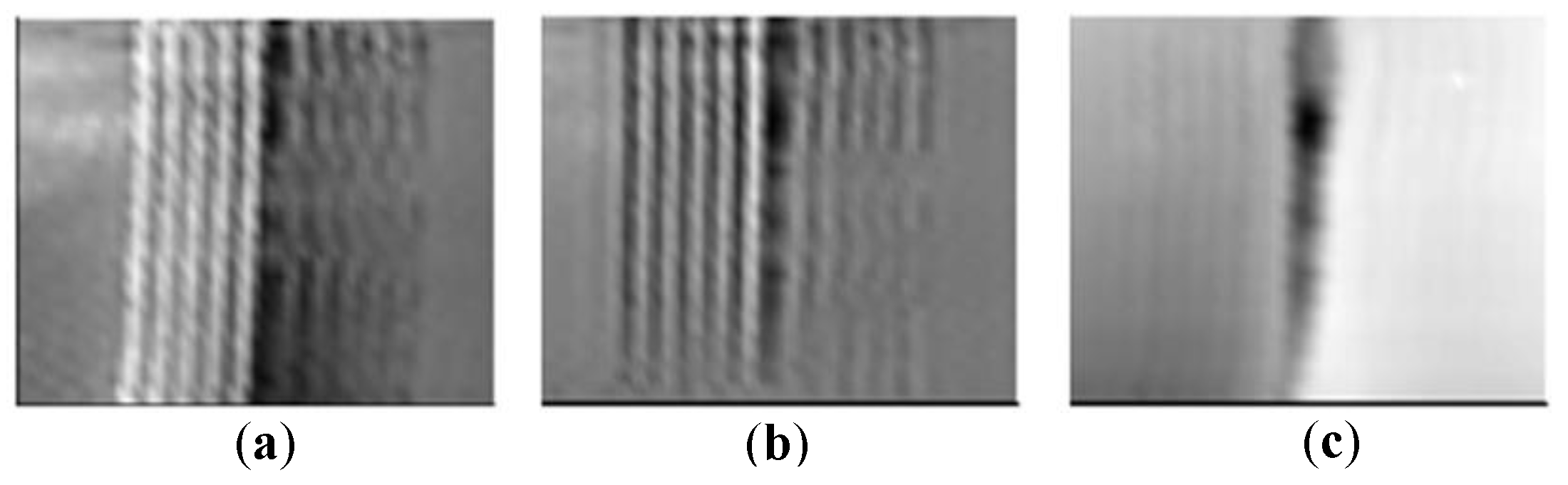
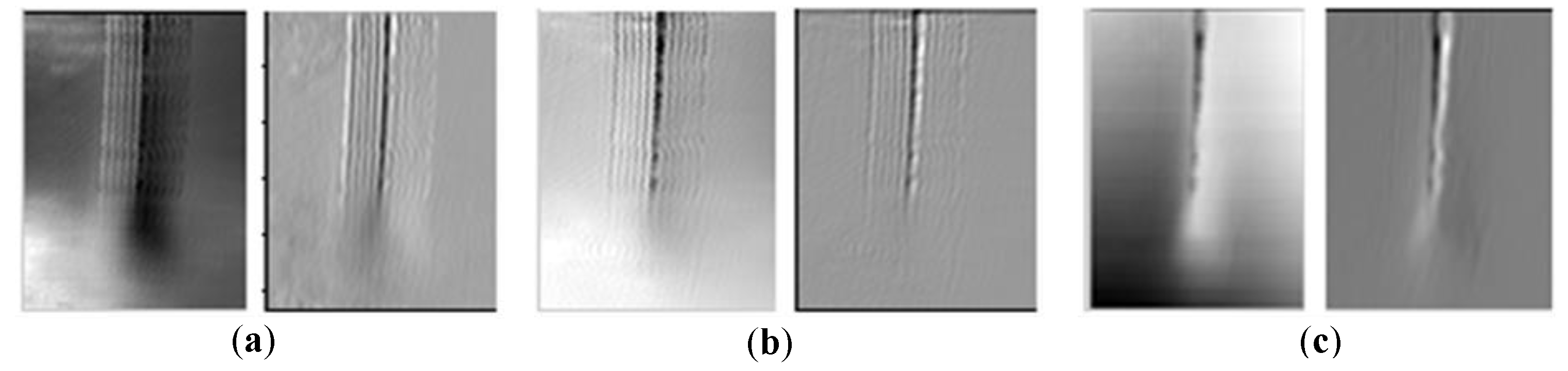
5.4. Evaluating Results for the Proposed SMP Algorithms
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A



References
- Schmerr, L.W. Fundamentals of Ultrasonic Nondestructive Evaluation: A Modeling Approach; Springer: New York, NY, USA, 2013. [Google Scholar]
- Abdel-Qader, I.; Abudayyeh, O.; Kelly, M. Analysis of Edge-Detection Techniques for Crack Identification in Bridges. J. Comput. Civ. Eng. 2003, 17, 255–263. [Google Scholar] [CrossRef]
- Salehi, H.; Das, S.; Chakrabartty, S.; Biswas, S.; Burgueño, R. Structural Assessment and Damage Identification Algorithms Using Binary Data. In Proceedings of the ASME 2015 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Colorado Springs, CO, USA, 21–23 September 2015; p. V002T05A011. [Google Scholar]
- Yuvaraj, P.; Murthy, A.R.; Iyer, N.R.; Samui, P.; Sekar, S.K. Prediction of fracture characteristics of high strength and ultra high strength concrete beams based on relevance vector machine. Int. J. Damage Mech. 2014, 23, 979–1004. [Google Scholar] [CrossRef]
- Chou, J.-S.; Pham, A.-D. Hybrid computational model for predicting bridge scour depth near piers and abutments. Autom. Constr. 2014, 48, 88–96. [Google Scholar] [CrossRef]
- Das, S.K.; Samui, P.; Sabat, A.K. Application of Artificial Intelligence to Maximum Dry Density and Unconfined Compressive Strength of Cement Stabilized Soil. Geotech. Geol. Eng. 2011, 29, 329–342. [Google Scholar] [CrossRef]
- Worden, K.; Lane, A.J. Damage identification using support vector machines. Smart Mater. Struct. 2001, 10, 540. [Google Scholar] [CrossRef]
- Bornn, L.; Farrar, C.R.; Park, G.; Farinholt, K. Structural Health Monitoring with Autoregressive Support Vector Machines. J. Vib. Acoust. 2009, 131, 021004–021004-9. [Google Scholar] [CrossRef]
- Kim, Y.; Chong, J.W.; Chon, K.H.; Kim, J. Wavelet-based AR–SVM for health monitoring of smart structures. Smart Mater. Struct. 2013, 22, 015003. [Google Scholar] [CrossRef]
- Zoughi, R.; Kharkovsky, S. Microwave and millimetre wave sensors for crack detection. Fatigue Fract. Eng. Mater. Struct. 2008, 31, 695–713. [Google Scholar]
- Kharkovsky, S.; Case, J.T.; Ghasr, M.T.; Zoughi, R.; Bae, S.W.; Belarbi, A. Application of microwave 3D SAR imaging technique for evaluation of corrosion in steel rebars embedded in cement-based structures. In Proceedings of the AIP Conference Proceedings, Philadelphia, PA, USA, 1–2 August 2012; Volume 1430, pp. 516–1523. [Google Scholar]
- Kharkovsky, S.; Giri, P.; Samali, B. Non-contact inspection of construction materials using 3-axis multifunctional imaging system with microwave and laser sensing techniques. {IEEE} Instrum. Meas. Mag. 2016, 19, 6–12. [Google Scholar] [CrossRef]
- Flood, I.; Christophilos, P. Modeling construction processes using artificial neural networks. Autom. Constr. 1996, 4, 07–320. [Google Scholar] [CrossRef]
- Tran, H. A hybrid fuzzy inference model based on RBFNN and artificial bee colony for predicting the uplift capacity of suction caissons. Autom. Constr. 2014, 41, 60–69. [Google Scholar]
- Faghih, N.M.; Rezaei, J.; Tavakoli, B.A.M. Efficiency Evaluation of Health Services using Linear Programming. J. Sch. Public. Health Inst. Public. Health Res. 2009, 7, 25–35, [In Persian]. [Google Scholar]
- Feng, M.Q.; Roqueta, G.; Jofre, L. 22—Non-Destructive Evaluation (NDE) of Composites: Microwave Techniques. In Non-Destructive Evaluation (NDE) of Polymer Matrix Composites; Karbhari, V.M., Ed.; Woodhead Publishing: Sawston, UK, 2013; pp. 574–616. [Google Scholar]
- Castro, A.F.; Valcuende, M.; Vidal, B. Using microwave near-field reflection measurements as a non-destructive test to determine water penetration depth of concrete. NDT E Int. 2015, 75, 26–32. [Google Scholar] [CrossRef]
- Buttress, A.; Jones, A.; Kingman, S. Microwave processing of cement and concrete materials—Towards an industrial reality? Cem. Concr. Res. 2015, 68, 112–123. [Google Scholar] [CrossRef]
- Yan, A.; Wu, K.; Zhang, X. A quantitative study on the surface crack pattern of concrete with high content of steel fiber. Cem. Concr. Res. 2002, 32, 1371–1375. [Google Scholar] [CrossRef]
- Rashidi, M.; Ghodrat, M.; Samali, B.; Kendall, B.; Zhang, C. Remedial modelling of steel bridges through application of analytical hierarchy process (AHP). Appl. Sci. 2017, 7, 168. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Zoughi, R. Microwave and millimeter wave nondestructive testing and evaluation—Overview and recent advances. IEEE Instrum. Meas. Mag. 2007, 10, 26–38. [Google Scholar] [CrossRef]
- Kharkovsky, S.; Ghasr, M.T.; Zoughi, R. Near-Field Millimeter-Wave Imaging of Exposed and Covered Fatigue Cracks. IEEE Trans. Instrum. Meas. 2009, 58, 2367–2370. [Google Scholar] [CrossRef]
- Zoughi, R. Microwave Non-Destructive Testing and Evaluation Principles; Springer Science & Business Media: Berlin, Germany, 2000. [Google Scholar]
- Ahanian, I.; Sadeghi, S.H.H.; Moini, R. An array waveguide probe for detection, location and sizing of surface cracks in metals. NDT E Int. 2015, 70, 38–40. [Google Scholar] [CrossRef]
- Noori Hoshyar, A.; Kharkovsky, S.N.; Samali, B.; Zoughi, R. Millimeter wave imaging of notches in metal specimens under dielectric coating using image processing. In Proceedings of the Fourth Conference On Smart Monitoring, Assessment And Rehabilitation Of Civil Structures, Zurich, Switzerland, 13–15 September 2017. [Google Scholar]
- Moosazadeh, M.; Kharkovsky, S.; Case, J.T. Microwave and millimetre wave antipodal Vivaldi antenna with trapezoid-shaped dielectric lens for imaging of construction materials. IET Microw. Antennas Propag. 2016, 10, 301–309. [Google Scholar] [CrossRef]
- McAndrew, A. Introduction to Digital Image Processing with MATLAB; Course Technology: Cambridge, MA, USA, 2004. [Google Scholar]
- Vapnik, V.N. An overview of statistical learning theory. IEEE Trans. Neural Networks 1999, 10, 988–999. [Google Scholar] [CrossRef] [PubMed]
- Maali, Y.; Al-Jumaily, A. Self-advising support vector machine. Knowl. Based Syst. 2013, 52, 214–222. [Google Scholar] [CrossRef]
- Lauer, F.; Bloch, G. Incorporating prior knowledge in support vector machines for classification: A review. Neurocomputing 2008, 71, 1578–1594. [Google Scholar] [CrossRef]
- Zhan, Y.; Shen, D. An adaptive error penalization method for training an efficient and generalized SVM. Pattern Recogn. 2006, 39, 342–350. [Google Scholar] [CrossRef]
- Hoshyar, A.; Kharkovsky, S.; Samali, B. Statistical Features and Traditional SA-SVM Classification Algorithm for Crack Detection. J. Signal Inf. Process. 2018, 9, 111–121. [Google Scholar] [CrossRef]
- Hoshyar, A.N.; Kharkovsky, S.; Taghavipour, S.; Samali, B.; Liyanapathirana, R. Structural Damage Detection of a Concrete Based on the Autoregressive All-pole Model Parameters and Artificial Intelligence Techniques. In Proceedings of the 9th International Conference on Signal Processing Systems, Auckland, New Zealand, 27–30 November 2017; pp. 57–61. [Google Scholar]
- Günther Wyszecki, W.S.S. Color Science: Concepts and Methods, Quantitative Data and Formulae; Wiley-Interscience: Hoboken, NJ, USA, 1982; p. 968. [Google Scholar]
- Hoshyar, A.N.; Kharkovsky, S.; Samali, B. Microwave imaging of composite materials using image processing. In Proceedings of the 2015 International Symposium on Antennas and Propagation (ISAP), Hobart, Tasmania, Australia, 9–12 November 2015. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB, 2nd ed.; Gatesmark Publishing: Knoxville, TN, USA, 2009. [Google Scholar]
- Grigoryan, A.M.; Agaian, S.S. Tensor transform-based quaternion fourier transform algorithm. Inf. Sci. 2015, 320, 62–74. [Google Scholar] [CrossRef]
- Bone, D.J.; Bachor, H.A.; Sandeman, R.J. Fringe-pattern analysis using a 2-D Fourier transform. Appl. Opt. 1986, 25, 1653–1660. [Google Scholar] [CrossRef]
- Noori Hoshyar, A.; Samali, B.; Liyanapathirana, R.; Taghavipour, S. Analysis of failure in concrete and reinforced-concrete beams for the smart aggregate–based monitoring system. Struct. Health Monit. 2019. [Google Scholar] [CrossRef]
- Aggelis, D.G. Classification of cracking mode in concrete by acoustic emission parameters. Mech. Res. Commun. 2011, 38, 153–157. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Concrete Beam | Size (mm) | Loading Capacity (kN) | Displacement Movement (mm/min) | Loading Cell Starting Point |
|---|---|---|---|---|
| Simple | 400 × 100 × 100 | 200 | 0.01 | 0 |
| Reinforced | 1700 × 150 × 250 | 1000 | 0.009 | 0 |
| Accuracy (%) | ||||
|---|---|---|---|---|
| No. Observations | Concrete Beam | RC Beam | ||
| Simple SVM | Developed SVM | Simple SVM | Developed SVM | |
| 1 | 84.72 | 87.23 | 85.26 | 86.19 |
| 2 | 84.63 | 87.19 | 85.42 | 87.14 |
| 3 | 84.81 | 87.22 | 85.39 | 86.19 |
| 4 | 84.76 | 87.23 | 85.4 | 86.18 |
| 5 | 84.83 | 87.19 | 85.39 | 86.15 |
| 6 | 84.46 | 87.23 | 85.28 | 86.19 |
| 7 | 84.91 | 87.22 | 85.2 | 86.5 |
| 8 | 84.63 | 87.24 | 85.48 | 86.19 |
| 9 | 84.65 | 87.35 | 85.4 | 86.19 |
| 10 | 84.61 | 87.22 | 85.52 | 86.56 |
| 11 | 84.91 | 87.2 | 85.38 | 86.25 |
| 12 | 84.52 | 87.18 | 85.29 | 86.19 |
| 13 | 84.66 | 87.2 | 85.43 | 86.66 |
| 14 | 84.87 | 87.21 | 85.29 | 86.16 |
| 15 | 84.8 | 87.21 | 85.42 | 86.18 |
| 16 | 84.81 | 87.19 | 85.46 | 86.19 |
| 17 | 84.82 | 87.23 | 85.44 | 86.12 |
| 18 | 84.58 | 87.23 | 85.31 | 86.19 |
| 19 | 84.88 | 87.22 | 85.27 | 86.19 |
| 20 | 84.76 | 87.23 | 85.44 | 86.21 |
| 21 | 84.55 | 87.23 | 85.32 | 86.19 |
| 22 | 84.8 | 87.28 | 85.43 | 86.38 |
| 23 | 84.65 | 87.19 | 85.32 | 86.19 |
| 24 | 84.6 | 87.17 | 85.37 | 86.19 |
| 25 | 84.87 | 87.19 | 85.47 | 86.47 |
| 26 | 84.58 | 87.22 | 85.45 | 86.19 |
| 27 | 84.83 | 87.22 | 85.24 | 86.72 |
| 28 | 84.93 | 87.35 | 85.42 | 86.14 |
| 29 | 84.68 | 87.19 | 85.4 | 86.19 |
| Average | 84.72 | 87.22 | 85.38 | 86.29 |
| Simple SVM | Developed SVM | |
|---|---|---|
| Mean | 84.73 | 87.22 |
| Observations | 29 | 29 |
| t statistic | −101.443 | |
| P (T ≤ t), one-tailed | 8.78×10−3 | |
| P (T ≤ t) two-tail | 1.76×10−3 |
| Property | Result | Description |
|---|---|---|
| Centroid | [38.7045 27.9205] | Mass center of the region |
| BoundingBox | [35.5000 2.5000 7 64] | Smallest rectangle containing the region |
| FilledImage | [64 × 7 logical] | Image with the size of bounding box for the region |
| FilledArea | 176 | Number of ‘on’ pixels |
| MajorAxisLength | 68.7051 | Number of pixels for the major axis of the ellipse |
| MinorAxisLength | 5.8664 | Number of pixels for the minor axis of the ellipse |
| Orientation | 88.0654 (degree) | Angle between the MajorAxisLength and the x-axis |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Noori Hoshyar, A.; Rashidi, M.; Liyanapathirana, R.; Samali, B. Algorithm Development for the Non-Destructive Testing of Structural Damage. Appl. Sci. 2019, 9, 2810. https://doi.org/10.3390/app9142810
Noori Hoshyar A, Rashidi M, Liyanapathirana R, Samali B. Algorithm Development for the Non-Destructive Testing of Structural Damage. Applied Sciences. 2019; 9(14):2810. https://doi.org/10.3390/app9142810
Chicago/Turabian StyleNoori Hoshyar, Azadeh, Maria Rashidi, Ranjith Liyanapathirana, and Bijan Samali. 2019. "Algorithm Development for the Non-Destructive Testing of Structural Damage" Applied Sciences 9, no. 14: 2810. https://doi.org/10.3390/app9142810
APA StyleNoori Hoshyar, A., Rashidi, M., Liyanapathirana, R., & Samali, B. (2019). Algorithm Development for the Non-Destructive Testing of Structural Damage. Applied Sciences, 9(14), 2810. https://doi.org/10.3390/app9142810