Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization


Abstract
Featured Application
Abstract
1. Introduction
2. Problem Formulation
2.1. Formation Rendezvous of Multi-UAVs
2.2. Pythagorean Hodograph Path
3. DCPSO with Cooperation
3.1. Standard Particle Swarm Optimization (PSO)
3.2. Distributed Cooperative Particle Swarm Optimization with Cooperation
3.2.1. Algorithm Initialization
3.2.2. Update of Velocities and Positions
3.2.3. Fitness Function
3.2.4. Cooperative Fitness Modification
3.2.5. Cooperative Path-Planning with DCPSO
3.2.6. Time Complexity Analysis and Remarks
4. Simulation Results
4.1. Path Planning for 2-D Formation Rendezvous
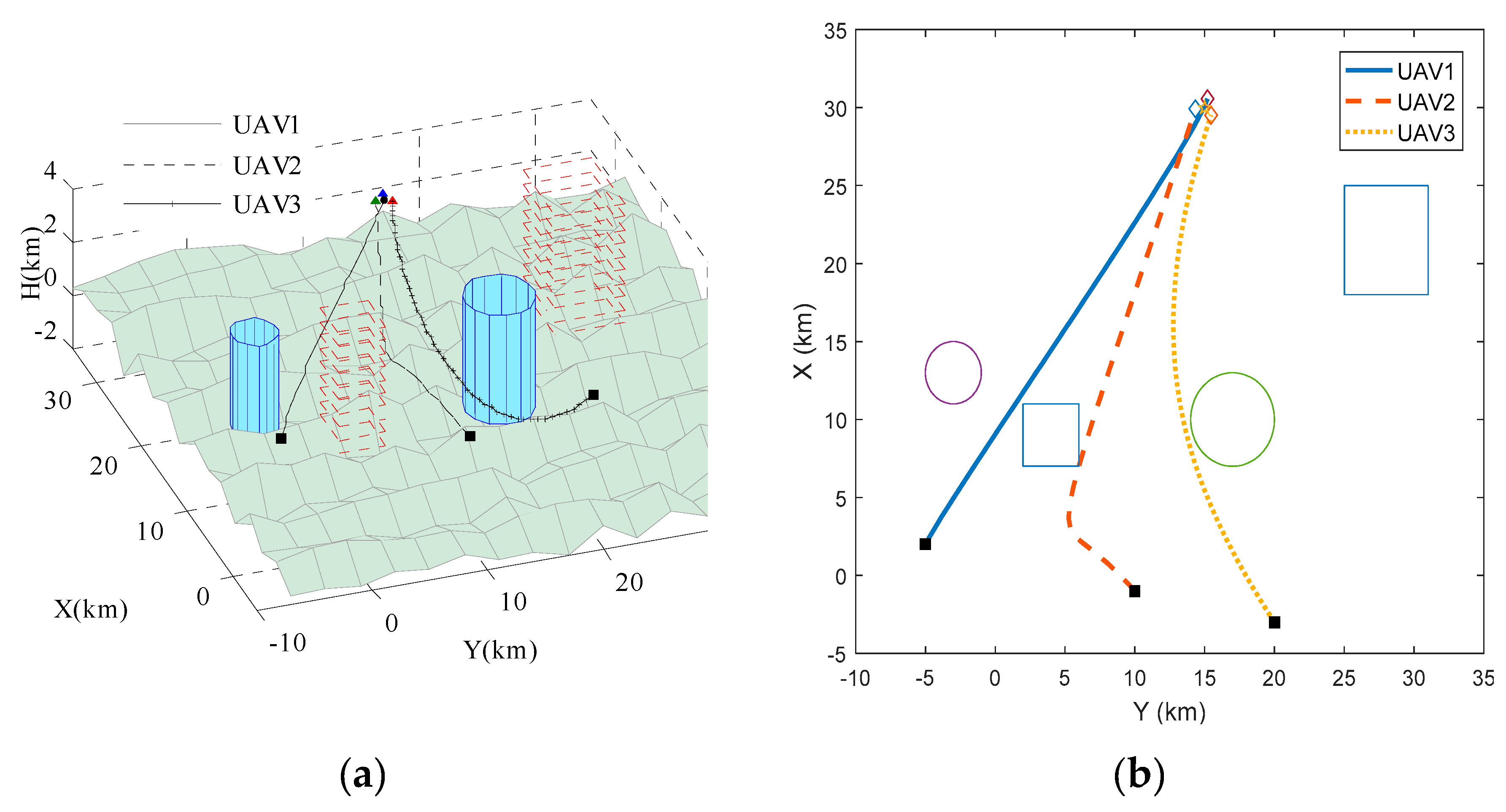
4.2. Path Planning for 3-D Formation Rendezvous
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- San Juan, V.; Santos, M.; Andujar, J.M. Intelligent UAV Map Generation and Discrete Path Planning for Search and Rescue Operations. Complexity 2018, 2018, 6879419. [Google Scholar] [CrossRef]
- Padro, J.C.; Munoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Zhen, Z.Y.; Xing, D.J.; Gao, C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerosp. Sci. Technol. 2018, 76, 402–411. [Google Scholar] [CrossRef]
- Morganti, C.; Perdon, A.M.; Conte, G.; Scaradozzi, D. Multi-Agent System Theory for Modelling a Home Automation System. In International Work-Conference on Artificial Neural Networks; Springer: Berlin/Heidelberg, Germany, 2009; pp. 585–593. [Google Scholar]
- Friedrich, M.; Hofsaess, I.; Wekeck, S. Timetable-based transit assignment using branch and bound techniques. Transp. Res. Rec. 2001, 1752, 100–107. [Google Scholar] [CrossRef]
- Burlacu, A.; Kloetzer, M.; Mahulea, C. Numerical Evaluation of Sample Gathering Solutions for Mobile Robots. Appl. Sci. 2019, 9, 791. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Autom. Control 2006, 51, 401–420. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Mobile robots cooperative control and obstacle avoidance using potential field. In Proceedings of the 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Budapest, Hungary, 3 July 2011–7 July 2011; pp. 61–66. [Google Scholar]
- Rezaee, H.; Abdollahi, F. A decentralized cooperative control scheme with obstacle avoidance for a team of mobile robots. IEEE Trans. Ind. Electron. 2014, 61, 347–354. [Google Scholar] [CrossRef]
- Nguyen, T.; La, H.M.; Le, T.D.; Jafari, M. Formation control and obstacle avoidance of multiple rectangular agents with limited communication ranges. IEEE Trans. Control Netw. Syst. 2017, 4, 680–691. [Google Scholar] [CrossRef]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inform. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Duguleana, M.; Mogan, G. Neural networks based reinforcement learning for mobile robots obstacle avoidance. Expert Syst. Appl. 2016, 62, 104–115. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; pp. 1–826. [Google Scholar]
- Manathara, J.G.; Ghose, D. Rendezvous of multiple UAVs with collision avoidance using consensus. J. Aerosp. Eng. 2012, 25, 480–489. [Google Scholar] [CrossRef]
- Mclain, T.W.; Beard, R.W. Coordination Variables, Coordination Functions, and Cooperative Timing Missions. J. Guid. Control Dyn. 2005, 28, 150–161. [Google Scholar] [CrossRef]
- Choe, R.; Puignavarro, J.; Cichella, V.; Xargay, E.; Hovakimyan, N. Cooperative Trajectory Generation Using Pythagorean Hodograph Bézier Curves. J. Guid. Control Dyn. 2016, 39, 1–20. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, H.T. Consensus based on learning game theory with a UAV rendezvous application. Chin. J. Aeronaut. 2015, 28, 191–199. [Google Scholar] [CrossRef]
- Yao, W.R.; Qi, N.M.; Liu, Y.F. Online Trajectory Generation with Rendezvous for UAVs Using Multistage Path Prediction. J. Aerosp. Eng. 2017, 30, 04016092. [Google Scholar] [CrossRef]
- Ismail, A.; Bagula, B.A.; Tuyishimire, E. Internet-Of-Things in Motion: A UAV Coalition Model for Remote Sensing in Smart Cities. Sensors 2018, 18, 2814. [Google Scholar] [CrossRef]
- Shanmugavel, M.; Tsourdos, A.; White, B.; Żbikowski, R. Co-operative path planning of multiple UAVs using Dubins paths with clothoid arcs. Control Eng. Pract. 2010, 18, 1084–1092. [Google Scholar] [CrossRef]
- Xing, Z.; Jie, C.; Xin, B.; Peng, Z. A memetic algorithm for path planning of curvature-constrained UAVs performing surveillance of multiple ground targets. Chin. J. Aeronaut. 2014, 27, 622–633. [Google Scholar]
- Tsourdos, A.; White, B.; Shanmugavel, M. Cooperative Path Planning of Unmanned Aerial Vehicles; John Wiley and Sons, Ltd.: Chichester, UK, 2010. [Google Scholar]
- Foo, J.L.; Knutzon, J.; Kalivarapu, V.; Oliver, J.; Winer, E. Path planning of unmanned aerial vehicles using B-splines and particle swarm optimization. J. Aerosp. Comput. Inf. Commun. 2009, 6, 271–290. [Google Scholar] [CrossRef]
- Alves Neto, A.; MacHaret, D.G.; Campos, M.F.M. On the generation of trajectories for multiple UAVS in environments with obstacles. J. Intell. Robot. Syst.Theory Appl. 2010, 57, 123–141. [Google Scholar] [CrossRef]
- Kang, S.; Choi, H.; Kim, Y. Formation flight and collision avoidance for multiple UAVs using concept of elastic weighting factor. Int. J. Aeronaut. Space Sci. 2013, 14, 75–84. [Google Scholar] [CrossRef]
- Farouki, R.T.; Sakkalis, I. Pythagorean hodographs. IBM J. Res. Dev. 1990, 34, 736–752. [Google Scholar] [CrossRef]
- Walton, D.J.; Meek, D.S. A pythagorean hodograph quintic spiral. Comput. Aided Des. 1996, 28, 943–950. [Google Scholar] [CrossRef]
- Walton, D.J.; Meek, D.S. Planar G 2 transition with a fair Pythagorean hodograph quintic curve. J. Comput. Appl. Math. 2002, 138, 109–126. [Google Scholar] [CrossRef]
- Farouki, R.T.; Al-Kandari, M.; Sakkalis, T. Hermite Interpolation by Rotation-Invariant Spatial Pythagorean-Hodograph Curves. Adv. Comput. Math. 2002, 17, 369–383. [Google Scholar] [CrossRef]
- Farouki, R.T.; Neff, C.A. Hermite interpolation by Pythagorean hodograph quintics. Math. Comput. 1995, 64, 1589–1609. [Google Scholar] [CrossRef]
- Farouki, R.T. Elastic bending energy of Pythagorean-hodograph curves. Comput. Aided Geom. Des. 1996, 13, 227–241. [Google Scholar] [CrossRef]
- Korayem, M.H.; Hoshiar, A.K.; Nazarahari, M. A hybrid co-evolutionary genetic algorithm for multiple nanoparticle assembly task path planning. Int. J. Adv. Manuf. Technol. 2016, 87, 3527–3543. [Google Scholar] [CrossRef]
- Qu, H.; Xing, K.; Alexander, T. An improved genetic algorithm with co-evolutionary strategy for global path planning of multiple mobile robots. Neurocomputing 2013, 120, 509–517. [Google Scholar] [CrossRef]
- Shorakaei, H.; Vahdani, M.; Imani, B.; Gholami, A. Optimal cooperative path planning of unmanned aerial vehicles by a parallel genetic algorithm. Robotica 2016, 34, 823–836. [Google Scholar] [CrossRef]
- Li, Y.H.; Zhan, Z.H.; Lin, S.J.; Zhang, J.; Luo, X.N. Competitive and cooperative particle swarm optimization with information sharing mechanism for global optimization problems. Inf. Sci. 2015, 293, 370–382. [Google Scholar] [CrossRef]
- Tian, D.; Shi, Z. MPSO: Modified particle swarm optimization and its applications. Swarm Evolut. Comput. 2018, 41, 49–68. [Google Scholar] [CrossRef]
- Suresh, K.; Kumarappan, N. Hybrid improved binary particle swarm optimization approach for generation maintenance scheduling problem. Swarm Evolut. Comput. 2013, 9, 69–89. [Google Scholar] [CrossRef]
- Tian, D.P. Particle Swarm Optimization with Chaos-based Initialization for Numerical Optimization. Intell. Autom. Soft Comput. 2018, 24, 331–342. [Google Scholar] [CrossRef]
- Fu, H.; Li, Z.; Liu, Z.; Wang, Z. Research on Big Data Digging of Hot Topics about Recycled Water Use on Micro-Blog Based on Particle Swarm Optimization. Sustainability 2018, 10, 15. [Google Scholar] [CrossRef]
- Liu, B.; Wang, L.; Jin, Y.H.; Tang, F.; Huang, D.X. Improved particle swarm optimization combined with chaos. Chaos Solitons Fractals 2005, 25, 1261–1271. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAVs/Rendezvous Point | |
|---|---|
| UAV1 | |
| UAV2 | |
| UAV3 | |
| Rendezvous point |
| UAVs | |
|---|---|
| UAV1 | (0.6, 0) |
| UAV2 | (–0.3, –0.6) |
| UAV3 | (–0.3, 0.6) |
| Algorithms | L1 (km) | L2 (km) | L3 (km) | dismin,12 (km) | dismin,13 (km) | dismin,23 (km) |
|---|---|---|---|---|---|---|
| DCPSO without cooperation | 35.0610 | 31.3760 | 34.3439 | 0.7863 | 1.0817 | 1.2000 |
| DCPSO with cooperation | 35.0611 | 35.0590 | 35.0618 | 0.9868 | 1.0817 | 0.4879 |
| Cooperative co-evolutionary genetic algorithms (CCGA) | 35.6054 | 35.5208 | 35.6208 | 0.9564 | 1.0817 | 0.3261 |
| Statistical Results | DCPSO with Cooperation | CCGA |
|---|---|---|
| Amount of simulations | 30 | 30 |
| Number of success | 27 | 13 |
| Success rate | 0.9 | 0.433 |
| Mean of L1 (km) | 35.0611 | 35.2982 |
| Standard deviation of L1 (km) | 0.0001 | 0.1530 |
| Mean of L2 (km) | 35.0310 | 35.1467 |
| Standard deviation of L2 (km) | 0.0673 | 0.1413 |
| Mean of L3 (km) | 35.0597 | 35.2329 |
| Standard deviation of L3 (km) | 0.0054 | 0.1828 |
| Average computation time(s) | 2.35 | 3.11 |
| UAVs/Rendezvous Point | |
|---|---|
| UAV1 | |
| UAV2 | |
| UAV3 | |
| Rendezvous point |
| L1 (km) | L2 (km) | L3 (km) | dismin,12 (km) | dismin,13 (km) | dismin,23 (km) |
|---|---|---|---|---|---|
| 35.0470 | 35.0432 | 35.0513 | 0.9527 | 1.0817 | 1.2000 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shao, Z.; Yan, F.; Zhou, Z.; Zhu, X. Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization. Appl. Sci. 2019, 9, 2621. https://doi.org/10.3390/app9132621
Shao Z, Yan F, Zhou Z, Zhu X. Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization. Applied Sciences. 2019; 9(13):2621. https://doi.org/10.3390/app9132621
Chicago/Turabian StyleShao, Zhuang, Fei Yan, Zhou Zhou, and Xiaoping Zhu. 2019. "Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization" Applied Sciences 9, no. 13: 2621. https://doi.org/10.3390/app9132621
APA StyleShao, Z., Yan, F., Zhou, Z., & Zhu, X. (2019). Path Planning for Multi-UAV Formation Rendezvous Based on Distributed Cooperative Particle Swarm Optimization. Applied Sciences, 9(13), 2621. https://doi.org/10.3390/app9132621