2.1. HL-RF Algorithm
Due to its simplicity and efficiency, the HL-RF algorithm [
20] is a widely used algorithm to estimate the failure probability. It includes the following three main steps.
(1) Transform the random variables
into standard normal random variables
by Rosenblatt or Nataf transformation techniques [
26], which is expressed as
where
is the inverse cumulative distribution function (CDF) of the standard normal distribution,
is the CDF of
, and
.
(2) Find the most probable point (MPP)
by using the following iterative formulation:
where
is the norm of a vector,
is the counter of iteration,
is the gradient of
, and
is the sensitivity factor that can be calculated by
(3) Estimate the failure probability by
where
is the CDF of the standard normal distribution and
is the reliability index.
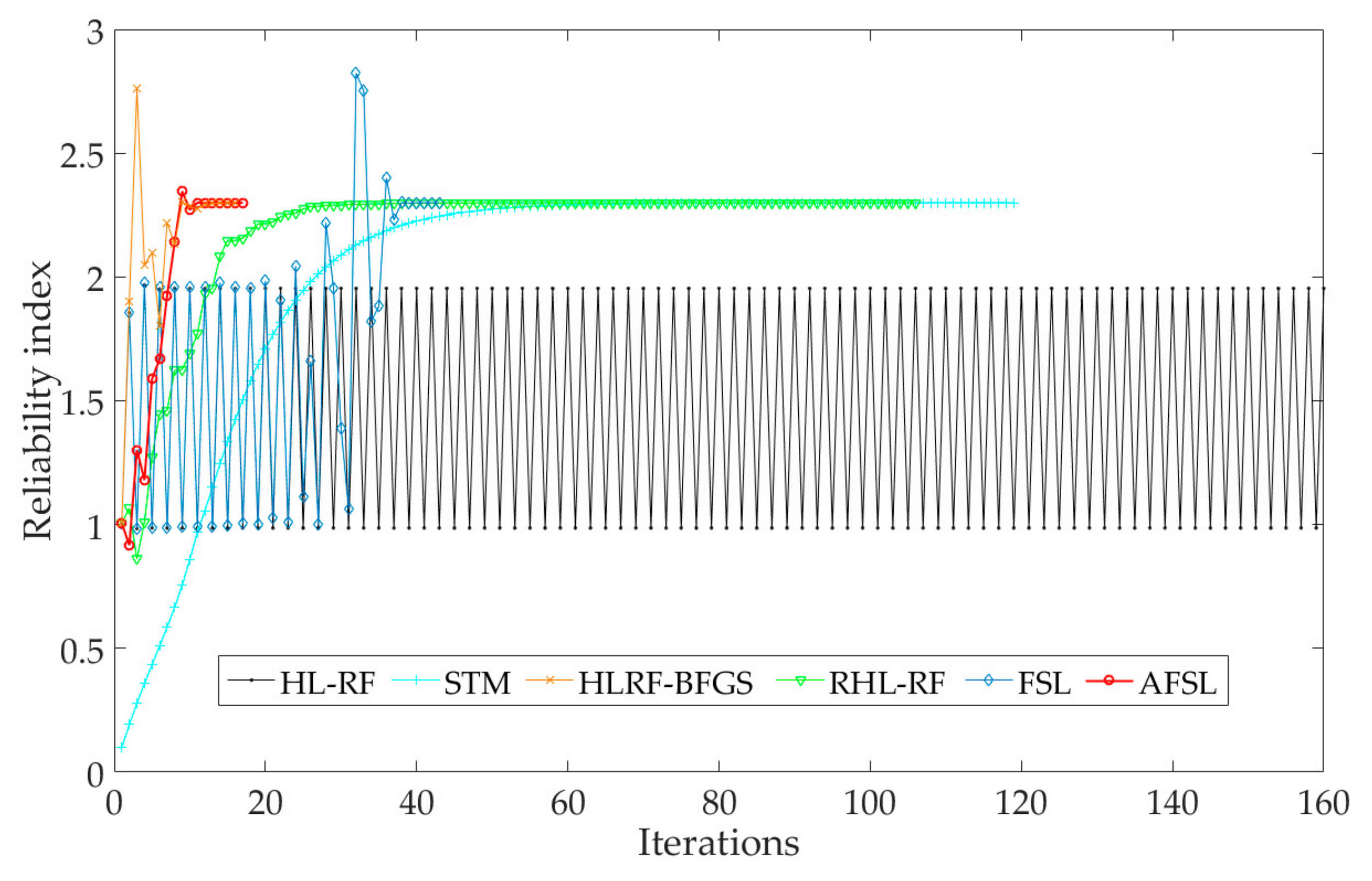
However, the HL-RF algorithm may fail to converge for highly nonlinear functions. As shown in
Figure 1, assume that
is obtained after the iteration of step
,
is determined based on the sensitivity factor
and the limit state surface. It is obviously that the line
is parallel to the negative gradient direction at point
. If the negative gradient direction at point
is parallel to the line
, we have
and the iterative process is caught in a periodic loop. Several improved algorithms, such as the STM [
24], HLRF-BFGS [
36], and RHL-RF [
27] algorithms, have been developed to overcome the non-convergence of HL-RF algorithm, but more computational efforts are needed.
2.2. Adaptive Finite Step Length Algorithm
To make the algorithm robust and efficient, this paper introduces a step length parameter into the sensitivity factor. As shown in
Figure 2, the sensitivity factor is defined as
where
is the auxiliary point along with the negative gradient direction at point
, which can be calculated by
where
is the step length.
The new point
, which is the intersection point of line
and limit state surface, can be obtained by
. In practical engineering, the LSFs of structures are generally too complex to solve directly the reliability index
by
. On this basis, the first-order Taylor expansion of the LSFs is used, and
is approximated as
The reliability index is accordingly computed as
Consequently, the iterative formulation can be summarized as
where,
Noted that if , Equation (11) becomes
Equation (12) indicates that the HL-RF algorithm is a special case of the above iterative formulation with infinite step length. Therefore, it is named as FSL algorithm [
29].
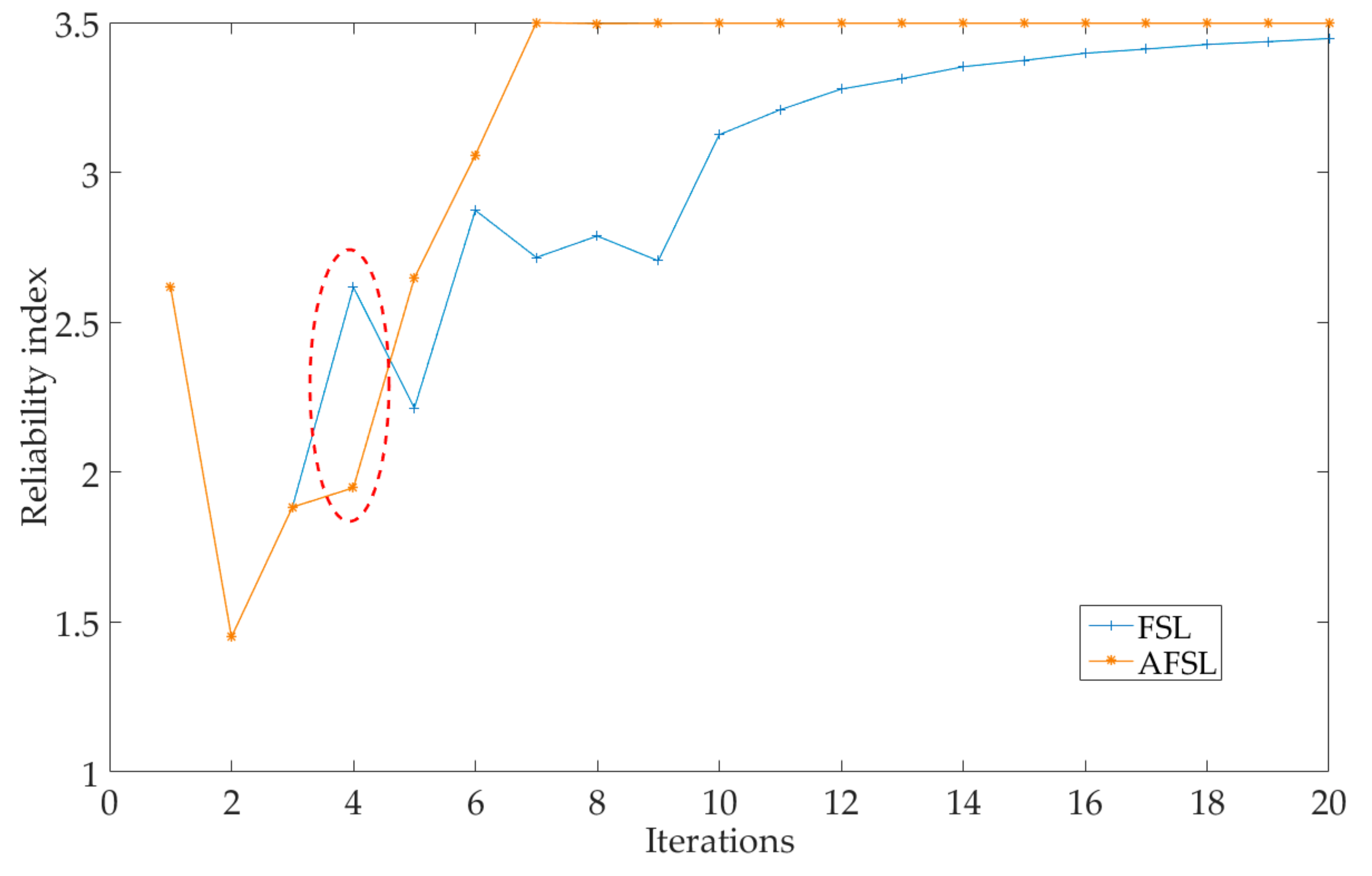
Compared with the HL-RF algorithm, the same simple FSL algorithm is better in robustness. It does not need the extra computational effort to calculate the step length. However, the step length is hard to determine properly for various nonlinear LSFs. For example, if the LSF is highly nonlinear, a large step length may make the algorithm fail to converge; otherwise, the convergence rate may be slow. To address these issues, an adaptive optimization method is proposed for FSL algorithm based on the sufficient descent condition with the Armijo line search in this paper.
According to the sufficient descent condition [
33], the adjustment of step length is expressed as
where
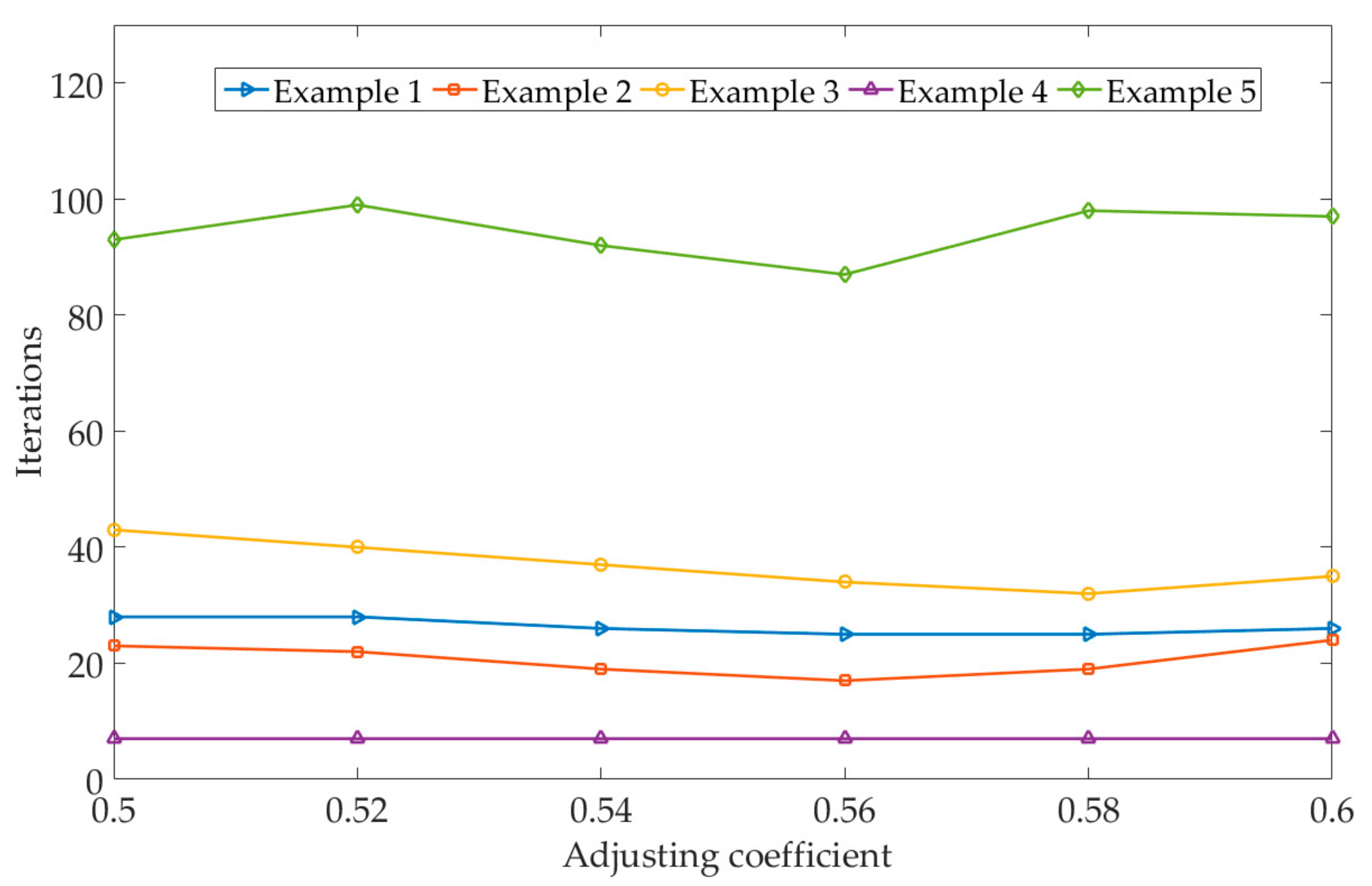
is the adjusting coefficient, and a recommended value for
in this paper is between 0.5~0.6.
In Equation (13), if
, the step length is set as
. In the extreme case that
,
is the point with a large deviation; this deviation will make the calculation inefficient, especially when the point nears the MPP. Therefore, such iteration points need to be optimized. The optimization model is defined as
where
is the optimized iteration point of
,
is the optimized coefficient, and
is the search direction that given by
Theoretically, the optimized coefficient should minimize the value of the LSF along the search direction. However, it requires the exact line search to result in considerable computational effort [
38,
39,
40]. For most optimization algorithms, the convergence rate does not depend on the exact search process. Therefore, the inexact line search can not only guarantee the acceptable reduction of the objective function but also make the final iteration sequence convergence, indicating which is powerful. The Armijo line search method [
31] is defined as
where
are pre-selected parameters,
is the smallest nonnegative integer satisfying the inequality, and
.
To ensure the global convergence, the merit function proposed by Zhang and Kiureghian [
21] is used, which is given as
where
is a constant and should satisfy
.
According to Equations (16) and (17), the optimized coefficient
can be calculated by
where
and
are used in the proposed method.
In addition, the initial step length is generally selected as 50 in the FSL algorithm [
29], which is unsuitable to a number of LSFs. In this paper, the initial step length is empirically defined as
where
is the initial point, and the mean point in standard normal space is the same as the initial point.
The convergence properties of the AFSL algorithm are analyzed as follows. Existing a step length
makes
. Let
with
, we have
where
. Therefore,
, showing the convergence of the proposed algorithm.
In addition, according to Equation (7), we have
where
and
.
Knowing that , Equation (21) can be modified as
Therefore,
The vector is orthogonal to the limit state surface, is the MPP. According to the above, the proposed algorithm can find the MPP easily.
2.3. Summary of the Proposed Algorithm
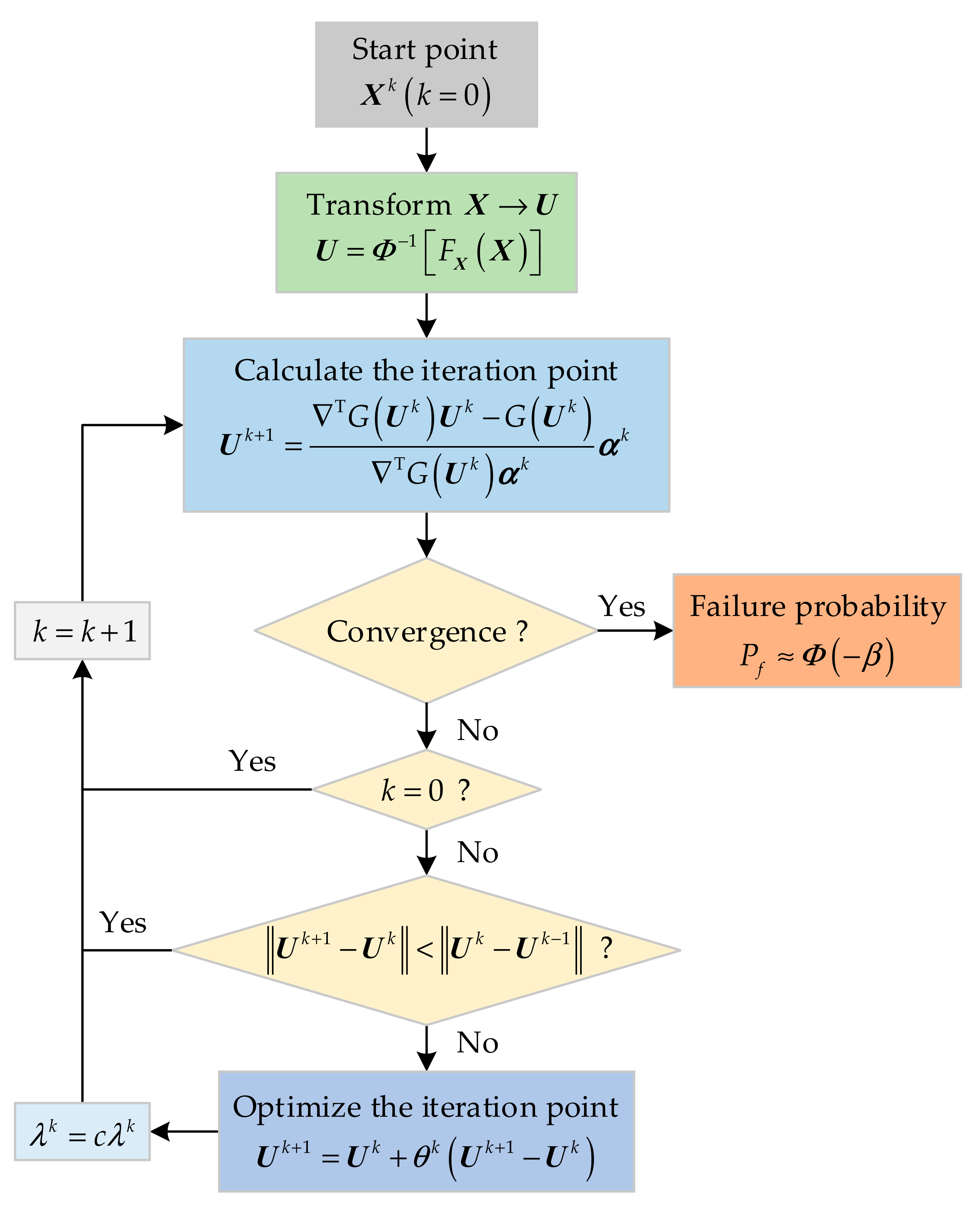
Three features of the proposed AFSL algorithm for reliability analysis are concluded as: (i) inheritance, that is, the proposed algorithm process features of the FSL algorithm are as simple as those of the HL-RF algorithm but superior in robustness; (ii) efficiency, the proposed algorithm is more efficient than the FSL algorithm due to the iteration point adaptive optimization method based on the Armijo line search being employed; (iii) availability, the AFSL algorithm is suitable for various nonlinear LSFs by establishing the relationship between the initial step length and the initial iteration point. Consequently, the proposed algorithm can efficiently deal with various reliability analysis problems, especially for highly nonlinear functions. The framework of the proposed AFSL algorithm is shown in
Figure 3, and the main steps are summarized as follows:
(1) Let , and set the start point .
(2) Transform the random variables into standard normal random variables by Equation (2).
(3) Calculate the sensitivity factor by Equation (11).
(4) Determine the new point based on Equation (10).
(5) Check convergence. If ( is a small positive number), then stop, and go to step (8); otherwise, go to step (6).
(6) If , set and go to step (3); otherwise, go to step (7).
(7) If , set and go to step (3); otherwise, optimize the iteration point based on Equation (14), set and , go to step (3).
(8) The failure probability is estimated by Equation (5).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}