Human-Touch-Inspired Material Recognition for Robotic Tactile Sensing


Abstract
1. Introduction
2. Related Work
3. Methodology
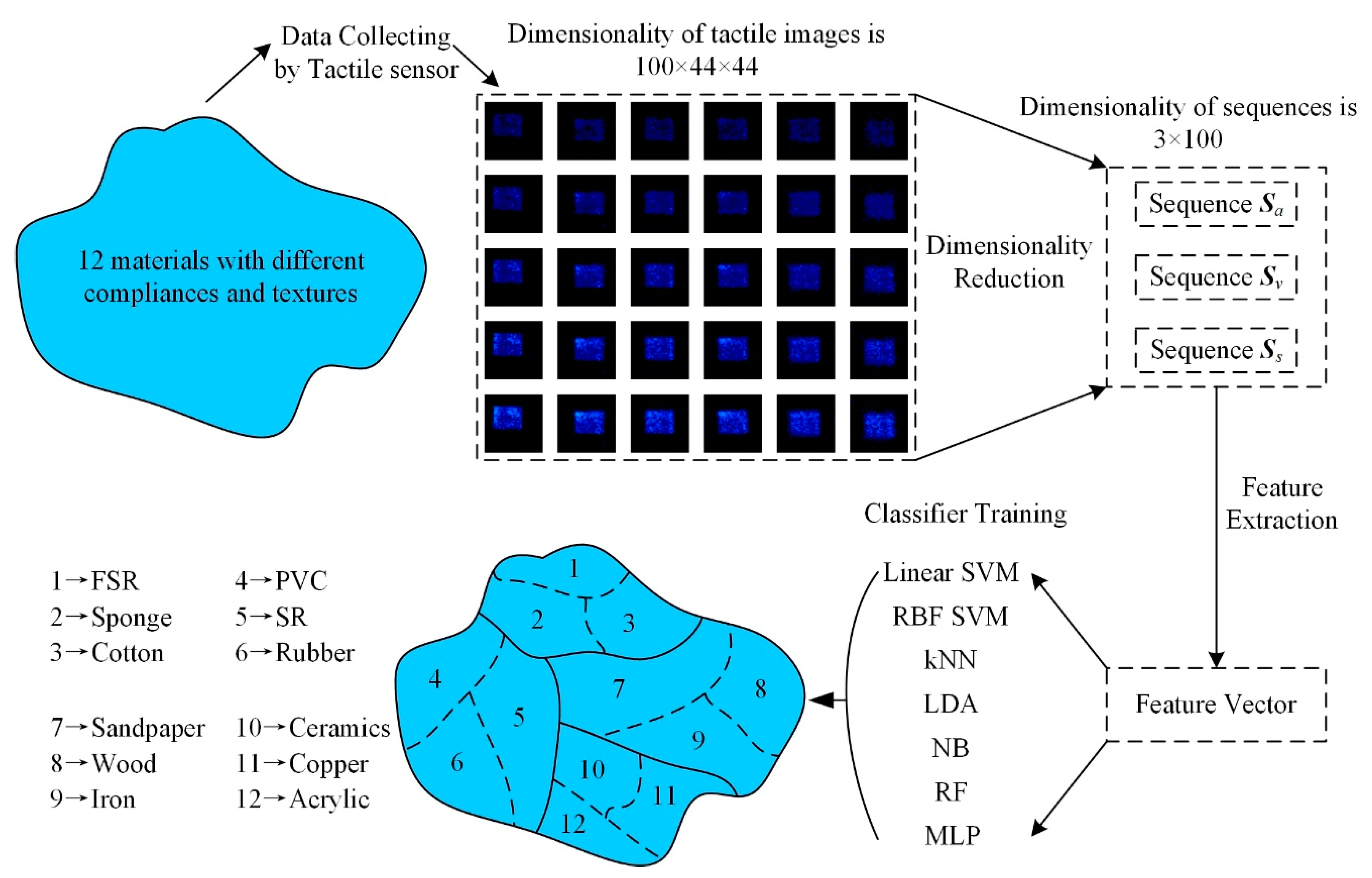
3.1. Material Recognition Method
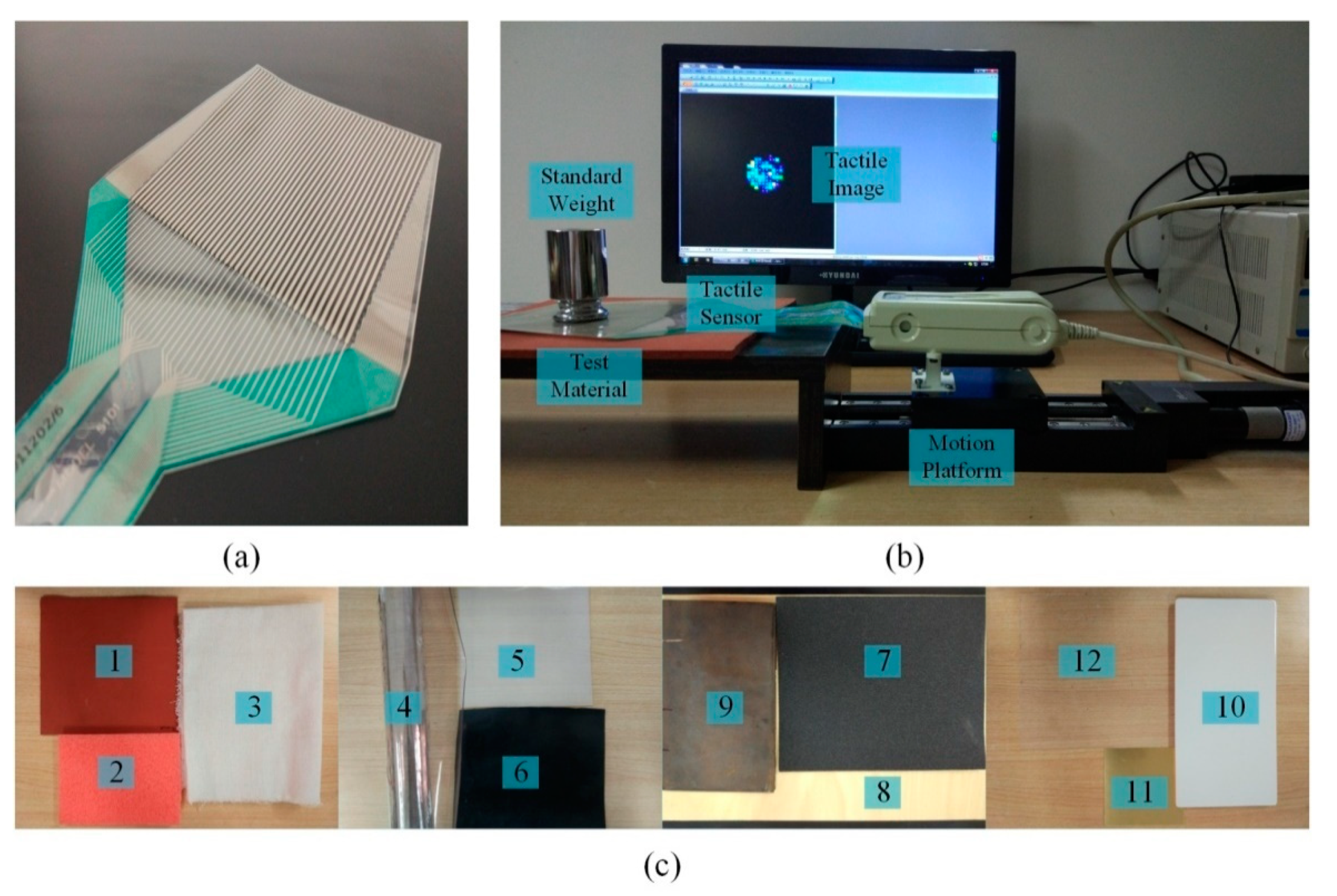
3.2. Experimental Setup
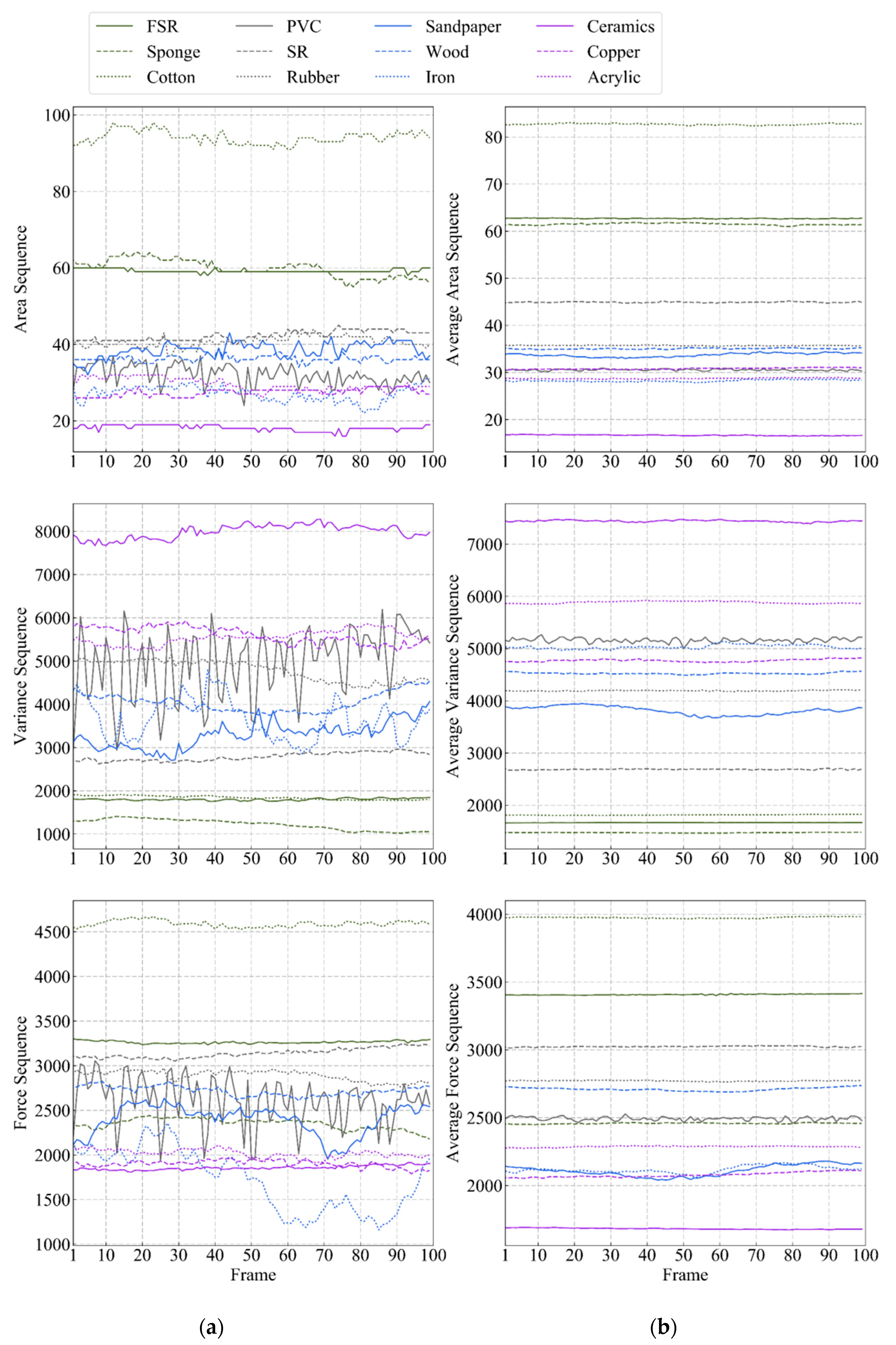
3.3. Data Collecting and Dimensionality Reduction
3.4. Feature Extraction Mimicing Human Tactile Perception
3.5. Classifier Configuration
4. Results
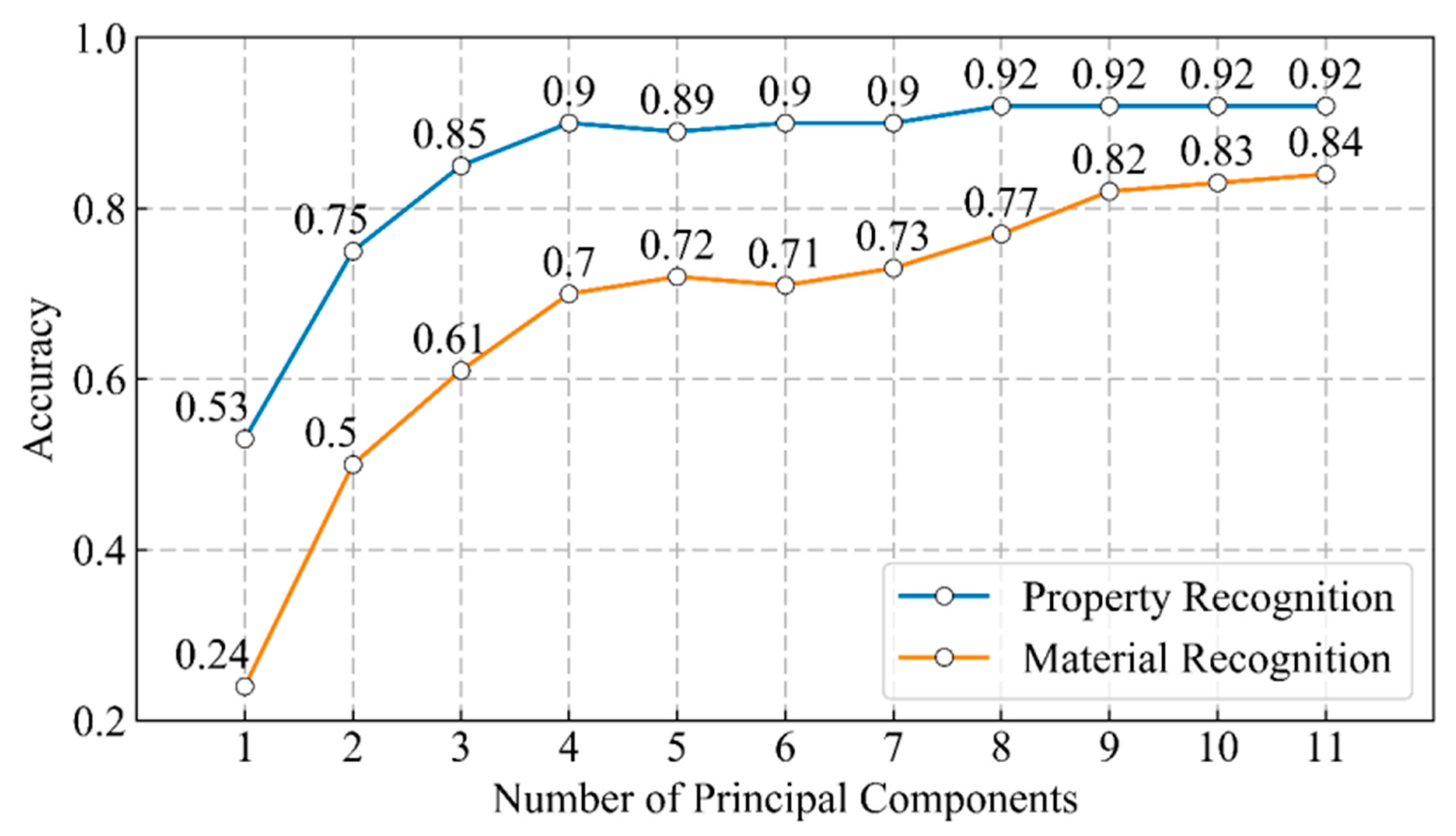
4.1. Property Recognition
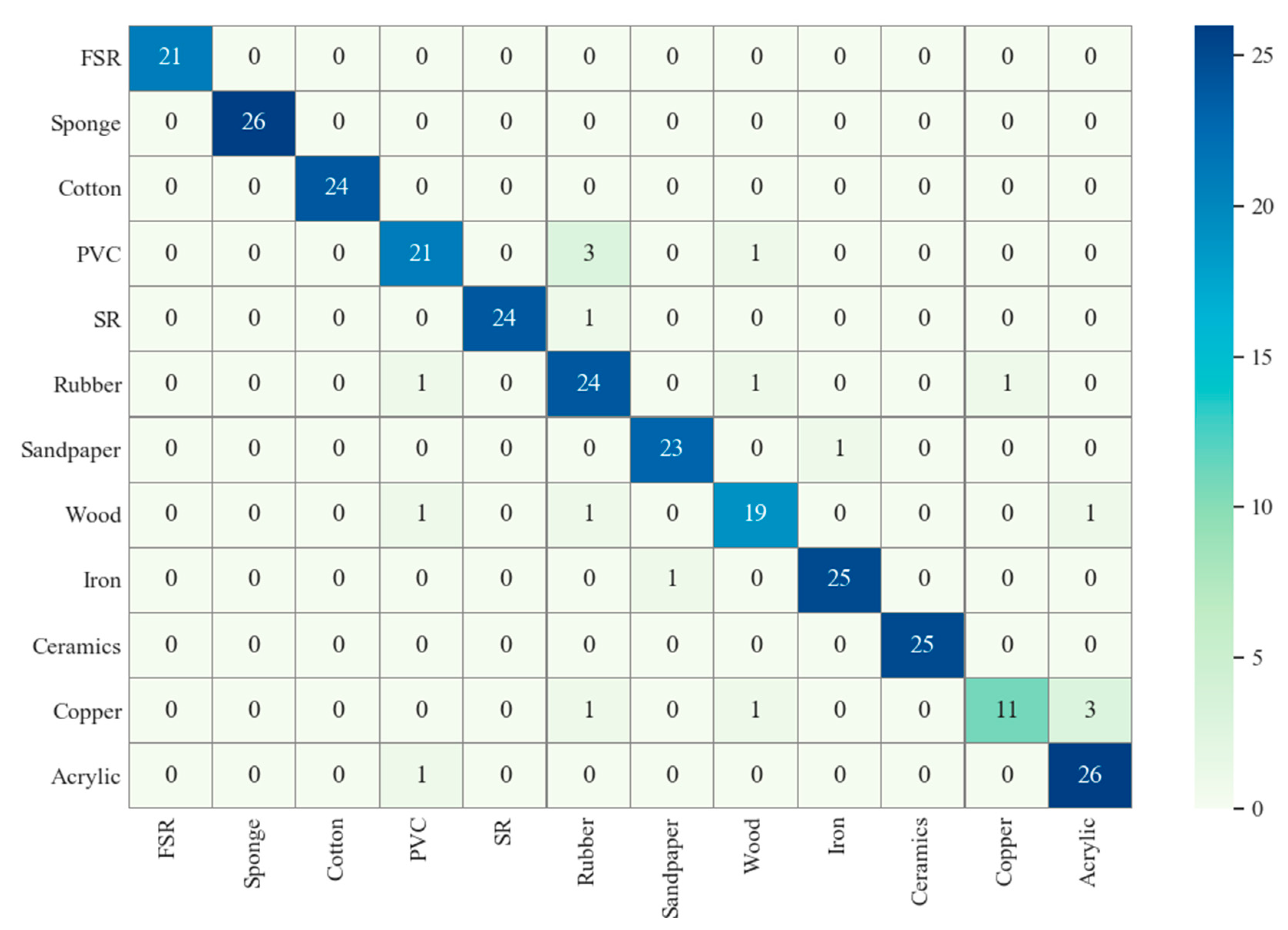
4.2. Material Recognition
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. Human–robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 2016, 29, 916–931. [Google Scholar] [CrossRef]
- Li, M.; Deng, J.; Zha, F.; Qiu, S.; Wang, X.; Chen, F. Towards Online Estimation of Human Joint Muscular Torque with a Lower Limb Exoskeleton Robot. Appl. Sci. 2018, 8. [Google Scholar] [CrossRef]
- Hu, D.; Gong, Y.; Hannaford, B.; Seibel, E.J. Semi-autonomous simulated brain tumor ablation with RAVENII Surgical Robot using behavior tree. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 3868–3875. [Google Scholar]
- Kehoe, B.; Kahn, G.; Mahler, J.; Kim, J.; Lee, A.; Lee, A.; Nakagawa, K.; Patil, S.; Boyd, W.D.; Abbeel, P.; et al. Autonomous multilateral debridement with the Raven surgical robot. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 1432–1439. [Google Scholar]
- Chortos, A.; Liu, J.; Bao, Z. Pursuing prosthetic electronic skin. Nat. Mater. 2016, 15, 937. [Google Scholar] [CrossRef] [PubMed]
- Cirillo, A.; Ficuciello, F.; Natale, C.; Pirozzi, S.; Villani, L. A Conformable Force/Tactile Skin for Physical Human–Robot Interaction. IEEE Robot. Autom. Lett. 2016, 1, 41–48. [Google Scholar] [CrossRef]
- Luo, S.; Bimbo, J.; Dahiya, R.; Liu, H. Robotic tactile perception of object properties: A review. Mechatronics 2017, 48, 54–67. [Google Scholar] [CrossRef]
- Howe, R.D.; Cutkosky, M.R. Dynamic tactile sensing: Perception of fine surface features with stress rate sensing. IEEE Trans. Robot. Autom. 1993, 9, 140–151. [Google Scholar] [CrossRef]
- Drimus, A.; Petersen, M.B.; Bilberg, A. Object texture recognition by dynamic tactile sensing using active exploration. In Proceedings of the IEEE Ro-Man: The IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 277–283. [Google Scholar]
- Cutkosky, M.R.; Ulmen, J. Dynamic Tactile Sensing. In The Human Hand as An Inspiration for Robot Hand Development; Balasubramanian, R., Santos, V.J., Eds.; Springer International Publishing: Cham, Germany, 2014; pp. 389–403. [Google Scholar]
- Hammock, M.L.; Chortos, A.; Tee, B.C.; Tok, J.B.; Bao, Z. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.-A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Heyneman, B.; Cutkosky, M.R. Slip classification for dynamic tactile array sensors. Int. J. Robot. Res. 2016, 35, 404–421. [Google Scholar] [CrossRef]
- Hughes, D.; Correll, N. Texture recognition and localization in amorphous robotic skin. Bioinspir. Biomim. 2015, 10, 055002. [Google Scholar] [CrossRef]
- Spiers, A.J.; Liarokapis, M.V.; Calli, B.; Dollar, A.M. Single-Grasp Object Classification and Feature Extraction with Simple Robot Hands and Tactile Sensors. IEEE Trans. Haptics 2016, 9, 207–220. [Google Scholar] [CrossRef] [PubMed]
- Kerr, E.; Mcginnity, T.M.; Coleman, S. Material Recognition using Tactile Sensing. Expert Syst. Appl. 2018, 94, 94–111. [Google Scholar] [CrossRef]
- Khasnobish, A.; Pal, M.; Tibarewala, D.N.; Konar, A.; Pal, K. Texture- and deformability-based surface recognition by tactile image analysis. Med. Biol. Eng. Comput. 2016, 54, 1269–1283. [Google Scholar] [CrossRef] [PubMed]
- Sinapov, J.; Sukhoy, V.; Sahai, R.; Stoytchev, A. Vibrotactile Recognition and Categorization of Surfaces by a Humanoid Robot. IEEE Trans. Robot. 2011, 27, 488–497. [Google Scholar] [CrossRef]
- Strese, M.; Schuwerk, C.; Iepure, A.; Steinbach, E. Multimodal Feature-Based Surface Material Classification. IEEE Trans. Haptics 2017, 10, 226–239. [Google Scholar] [CrossRef]
- Kerr, E.; Mcginnity, T.M.; Coleman, S. Material classification based on thermal and surface texture properties evaluated against human performance. In Proceedings of the International Conference on Control Automation Robotics & Vision, Singapore, 10–12 December 2014; pp. 444–449. [Google Scholar]
- Bhattacharjee, T.; Rehg, J.M.; Kemp, C.C. Haptic classification and recognition of objects using a tactile sensing forearm. In Proceedings of the Ieee/rsj International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 4090–4097. [Google Scholar]
- Lederman, S.J.; Klatzky, R.L. Extracting object properties through haptic exploration. Acta Psychol. 1993, 84, 29–40. [Google Scholar] [CrossRef]
- Kaboli, M.; Cheng, G. Robust Tactile Descriptors for Discriminating Objects From Textural Properties via Artificial Robotic Skin. IEEE Trans. Robot. 2018, 34, 985–1003. [Google Scholar] [CrossRef]
- Tanaka, D.; Matsubara, T.; Ichien, K.; Sugimoto, K. Object manifold learning with action features for active tactile object recognition. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 608–614. [Google Scholar]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile Sensing—From Humans to Humanoids. IEEE Trans. Robot. 2010, 26, 1–20. [Google Scholar] [CrossRef]
- Romano, J.M.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K.J. Human-Inspired Robotic Grasp Control with Tactile Sensing. IEEE Trans. Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]
- Stark, B.; Carlstedt, T.; Hallin, R.G.; Risling, M. Distribution of human Pacinian corpuscles in the hand. A cadaver study. J. Hand Surg. 1998, 23, 370–372. [Google Scholar] [CrossRef]
- Johansson, R.S.; Vallbo, A.B. Tactile sensibility in the human hand: Relative and absolute densities of four types of mechanoreceptive units in glabrous skin. J. Physiol. 1979, 286, 283–300. [Google Scholar] [CrossRef] [PubMed]
- Balasubramanian, R.; Santos, V.J. The Human Hand as An Inspiration for Robot Hand Development; Springer Publishing Company, Incorporated: Saxonburg, PA, USA, 2014. [Google Scholar]
- Lederman, S.J.; Klatzky, R.L. Hand movements: A window into haptic object recognition. Cogn. Psychol. 1987, 19, 342–368. [Google Scholar] [CrossRef]
- Popov, V.L. Contact Mechanics and Friction; Springer: Heidelberg, Berlin, 2010; pp. 219–250. [Google Scholar]
- Kaboli, M.; Armando, D.L.R.T.; Walker, R.; Cheng, G. In-hand object recognition via texture properties with robotic hands, artificial skin, and novel tactile descriptors. In Proceedings of the Ieee-Ras International Conference on Humanoid Robots, Seoul, Korea, 3–5 November 2015; pp. 1155–1160. [Google Scholar]
- Chathuranga, D.S.; Wang, Z.; Ho, V.A.; Mitani, A. A biomimetic soft fingertip applicable to haptic feedback systems for texture identification. In Proceedings of the IEEE International Symposium on Haptic Audio Visual Environments and Games, Istanbul, Turkey, 26–27 October 2013; pp. 29–33. [Google Scholar]
- Batista, G.E.A.P.A.; Keogh, E.J.; Tataw, O.M.; Souza, V.M.A.D. CID: An efficient complexity-invariant distance for time series. Data Min. Knowl. Discov. 2014, 28, 634–669. [Google Scholar] [CrossRef]
- Tang, Y. Deep Learning using Linear Support Vector Machines. arXiv 2013, arXiv:1306.0239. [Google Scholar]
- Lee, C.P.; Lin, C.J. A study on L2-loss (squared hinge-loss) multiclass SVM. Neural Comput. 2013, 25, 1302–1323. [Google Scholar] [CrossRef] [PubMed]
- Kak, A.C.; Martínez, A.M. PCA versus LDA. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 228–233. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Bishop, C.M. Neural Networks for Pattern Recognition; Oxford University Press: Oxford, UK, 1995; pp. 1235–1242. [Google Scholar]
- Shull, K.R. Contact mechanics and the adhesion of soft solids. Mater. Sci. Eng. R 2002, 36, 1–45. [Google Scholar] [CrossRef]
- Jamali, N.; Sammut, C. Majority Voting: Material Classification by Tactile Sensing Using Surface Texture. IEEE Trans. Robot. 2011, 27, 508–521. [Google Scholar] [CrossRef]
- Ho, V.A.; Araki, T.; Makikawa, M.; Hirai, S. Experimental investigation of surface identification ability of a low-profile fabric tactile sensor. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Portugal, 7–12 October 2012; pp. 4497–4504. [Google Scholar]
- Baishya, S.S.; Bäuml, B. Robust material classification with a tactile skin using deep learning. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 8–15. [Google Scholar]
- Gómez Eguíluz, A.; Rañó, I.; Coleman, S.A.; McGinnity, T.M. Multimodal Material identification through recursive tactile sensing. Robot. Auton. Syst. 2018, 106, 130–139. [Google Scholar] [CrossRef]
- Rasouli, M.; Chen, Y.; Basu, A.; Kukreja, S.L.; Thakor, N.V. An Extreme Learning Machine-Based Neuromorphic Tactile Sensing System for Texture Recognition. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 313–325. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soft-Rough | Soft-Smooth | Rigid-Rough | Rigid-Smooth |
|---|---|---|---|
| FSR | PVC | Sandpaper | Ceramics |
| Sponge | SR | Wood | Copper |
| Cotton | Rubber | Iron | Acrylic |
| Classification Basis | Pacinian Corpuscle | Ruffini Corpuscle | Merkel Cells | Meissner’s Corpuscle |
|---|---|---|---|---|
| Stimuli Frequency (Hz) | 40–500+ | 100–500+ | 0.4–3 | 3–40 |
| Stimuli Type | High Frequency Vibration | Sustained Downward Pressure; Skin Slip; Tangential Force | Spatial deformation; Sustained pressure; Texture | Low Frequency Vibration |
| Features | Meaning | Tactile Stimulus |
|---|---|---|
| Mean of Sa | Real contact area | Sustained pressure and texture |
| Mean of Sv | Pressure distribution | Texture |
| Mean of Ss | Contact pressure | Sustained pressure |
| Absolute Energy of Ss | Contact force and amplitude of vibration | Sustained pressure and low frequency vibration |
| Standard Deviation of Ss | Consistency of contact force | Texture |
| cA4 of Ss | Approximate information of vibration | Sustained pressure |
| cD4 of Ss | Detail information of vibration | Low frequency vibration |
| cD3 of Ss | Detail information of vibration | Medium-low frequency vibration |
| cD2 of Ss | Detail information of vibration | Medium-high frequency vibration |
| cD1 of Ss | Detail information of vibration | High frequency vibration |
| CID of Ss | Approximate frequency of vibration | High frequency vibration |
| Recognition | Performance Indexes | Linear SVM | RBF SVM | kNN | LDA | NB | RF | MLP |
|---|---|---|---|---|---|---|---|---|
| Property Recognition | Accuracy (%) | 92.01 | 94.10 | 95.83 | 90.97 | 77.43 | 90.63 | 94.79 |
| Precision (%) | 92.25 | 94.25 | 95.75 | 91.75 | 79.50 | 90.75 | 95.00 | |
| Recall (%) | 92.25 | 94.00 | 95.75 | 91.00 | 77.50 | 91.00 | 94.75 | |
| F1-Score (%) | 92.25 | 94.00 | 95.75 | 91.25 | 74.50 | 90.75 | 94.75 | |
| Time (ms) | 35.68 | 35.07 | 36.03 | 35.97 | 35.99 | 37.02 | 35.44 | |
| Material Recognition | Accuracy (%) | 84.03 | 85.42 | 85.76 | 80.56 | 73.61 | 80.21 | 90.28 |
| Precision (%) | 85.25 | 86.58 | 86.42 | 82.83 | 76.08 | 80.75 | 90.58 | |
| Recall (%) | 84.08 | 85.58 | 86.17 | 81.25 | 74.41 | 80.83 | 90.25 | |
| F1-Score (%) | 84.17 | 85.25 | 86.08 | 80.67 | 73.58 | 80.50 | 90.17 | |
| Time (ms) | 36.76 | 35.92 | 36.38 | 36.74 | 35.11 | 36.67 | 36.78 |
| Recognition | Processes | Linear SVM | RBF SVM | kNN | LDA | NB | RF | MLP |
|---|---|---|---|---|---|---|---|---|
| Property Recognition | Data Reading (ms) | 19.60 | 19.86 | 19.78 | 19.75 | 20.58 | 19.53 | 20.13 |
| Dimensionality Reduction (ms) | 11.49 | 10.80 | 11.58 | 11.51 | 11.03 | 12.63 | 10.75 | |
| Feature Extraction (ms) | 4.56 | 4.33 | 4.64 | 4.66 | 4.35 | 4.83 | 4.53 | |
| Classification (μs) | 0.69 | 22.92 | 17.36 | 0.69 | 1.39 | 2.78 | 3.47 | |
| Material Recognition | Data Reading (ms) | 19.85 | 19.94 | 19.69 | 19.84 | 19.98 | 21.04 | 20.58 |
| Dimensionality Reduction (ms) | 12.01 | 11.45 | 11.76 | 11.83 | 10.74 | 11.09 | 11.34 | |
| Feature Extraction (ms) | 4.88 | 4.56 | 4.85 | 5.04 | 4.23 | 4.36 | 4.83 | |
| Classification (μs) | 1.39 | 48.62 | 211.81 | 1.39 | 2.08 | 118.06 | 3.47 |
| Recognition | D100 | D150 | D250 | D300 |
|---|---|---|---|---|
| Property Recognition | 93.24% | 94.85% | 95.77% | 94.16% |
| Material Recognition | 91.02% | 86.47% | 87.53% | 86.14% |
| Recognition | Wood | Sponge | Cotton | Iron | Sandpaper | Ceramics |
|---|---|---|---|---|---|---|
| Property Recognition | 86.67% | 93.33% | 80.00% | 83.33% | 96.66% | 80.00% |
| Material Recognition | 70.00% | 83.33% | 70.00% | 73.33% | 90.00% | 66.67% |
| Year | EP | Tactile Data | ToEP (s) | NoF | NoM | Accuracy |
|---|---|---|---|---|---|---|
| 2011 [41] | Prescribed contact; slide and lift | Lateral stretch sensed by strain gauges; vibration sensed by PVDFs | N/A | 6 | 9 | 95% |
| 2012 [42] | Prescribed slide with acceleration | Details calculated from outputs of the tactile sensor by DWT | N/A | 10 | 3 | 90% |
| 2012 [21] | Prescribed push | The sequence of maximum force; contact area and contact motion during contact | 1.2 | 20 | 18 | 72% |
| 2015 [14] | Rubbing the texture on the surface of the amorphous robot skin near a sensor by hand | The spectrum of the signal produced by individual microphones | 5 | 128 | 15 | 71% |
| 2016 [43] | Prescribed grasp with right hand, thumb and index finger of robots; slide; release | Spatial-temporal force signal of tactile skin | 5+ | 24,000 | 6 | 97% |
| 2016 [17] | Free exploration by twenty healthy subjects | Intensities and geometric property of tactile image | 0.1 | 10 | 4 | 78% |
| 2017 [19] | Capture a surface image; impact and move arbitrarily | Described sound; image, friction force; acceleration features | N/A | 6 | 69 | 74% |
| 2018 [44] | Contact until temperature was stable; prescribed circular slide | Vibration signal; absolute temperature; thermal flux | N/A | 9 | 34 | 98% |
| 2018 [16] | Prescribed press and slide | Static temperature; thermal flow rate; static vibration; vibration strength | 20+ | 18 | 14 | 86% |
| 2018 [45] | Prescribed contact, slide and holding | Biomimetic tactile signals based on the values of force sensitive units | 12+ | 90 | 10 | 92% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Y.; Chen, C.; Wu, D.; Xi, W.; Liu, H. Human-Touch-Inspired Material Recognition for Robotic Tactile Sensing. Appl. Sci. 2019, 9, 2537. https://doi.org/10.3390/app9122537
Xie Y, Chen C, Wu D, Xi W, Liu H. Human-Touch-Inspired Material Recognition for Robotic Tactile Sensing. Applied Sciences. 2019; 9(12):2537. https://doi.org/10.3390/app9122537
Chicago/Turabian StyleXie, Yu, Chuhao Chen, Dezhi Wu, Wenming Xi, and Houde Liu. 2019. "Human-Touch-Inspired Material Recognition for Robotic Tactile Sensing" Applied Sciences 9, no. 12: 2537. https://doi.org/10.3390/app9122537
APA StyleXie, Y., Chen, C., Wu, D., Xi, W., & Liu, H. (2019). Human-Touch-Inspired Material Recognition for Robotic Tactile Sensing. Applied Sciences, 9(12), 2537. https://doi.org/10.3390/app9122537