Improved Control of Forest Microgrids with Hybrid Complementary Energy Storage

Abstract
Featured Application
Abstract
1. Introduction
2. Operation Mode and Coordination Control of Microgrid in Forest Area
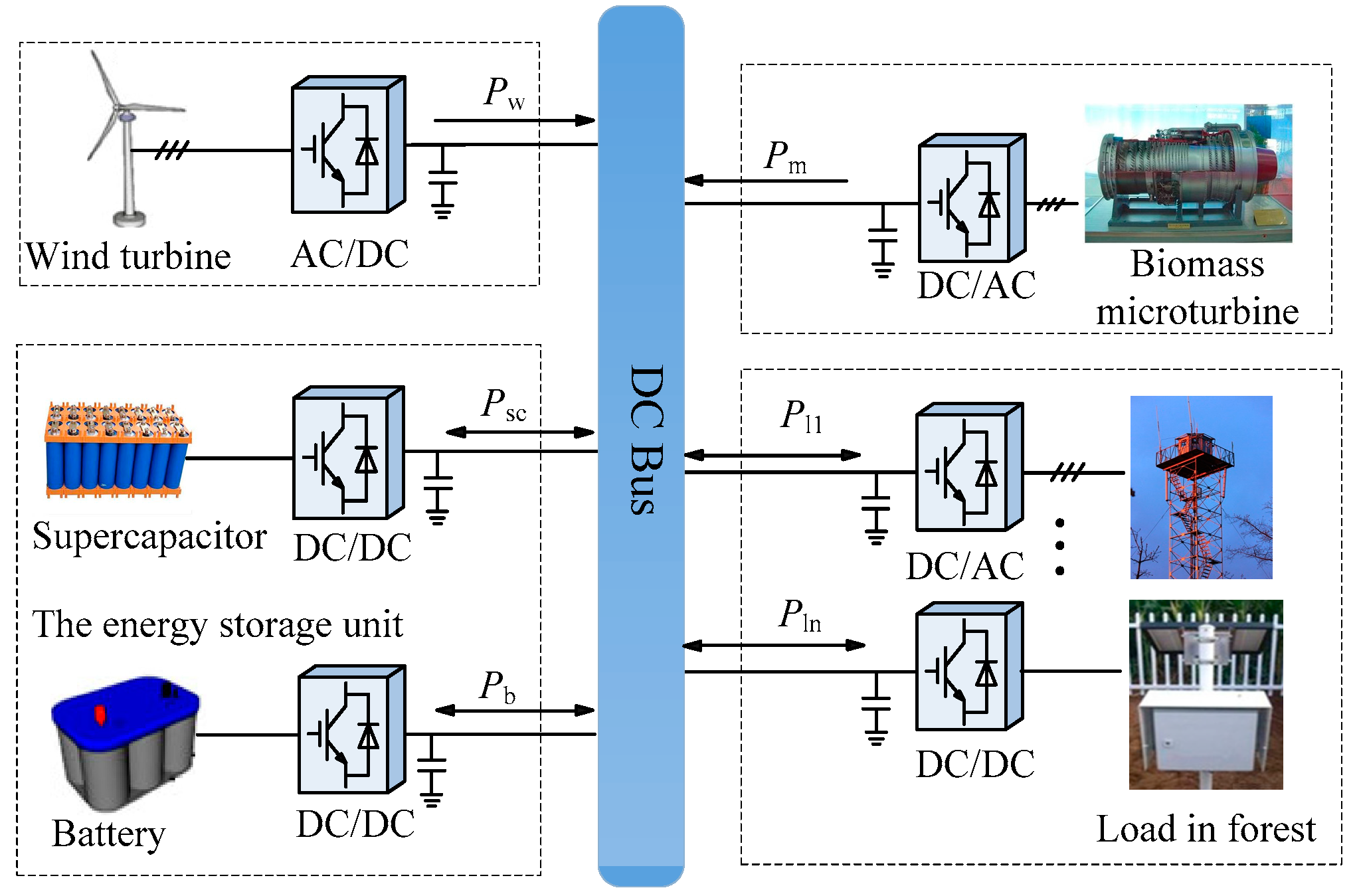
2.1. Structure of the Forest Microgrid
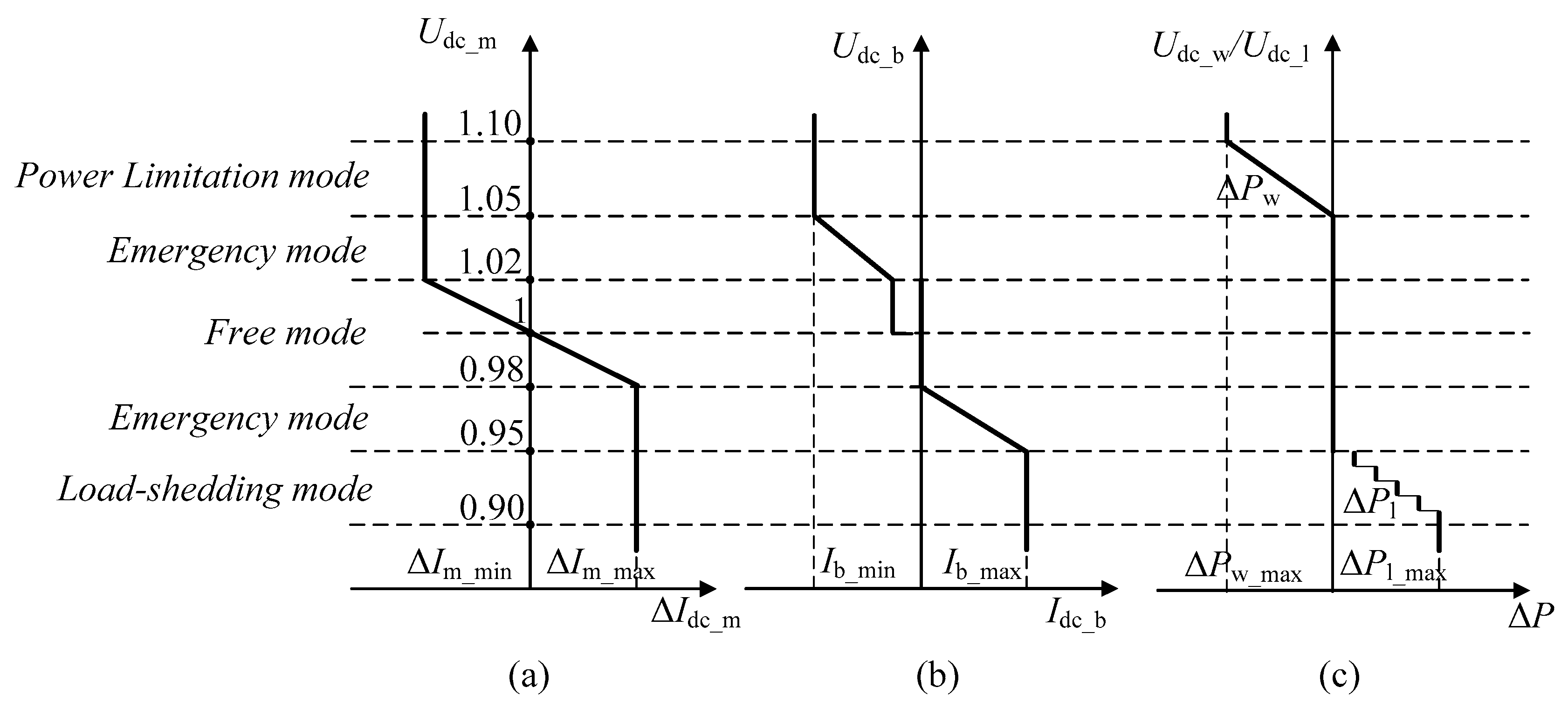
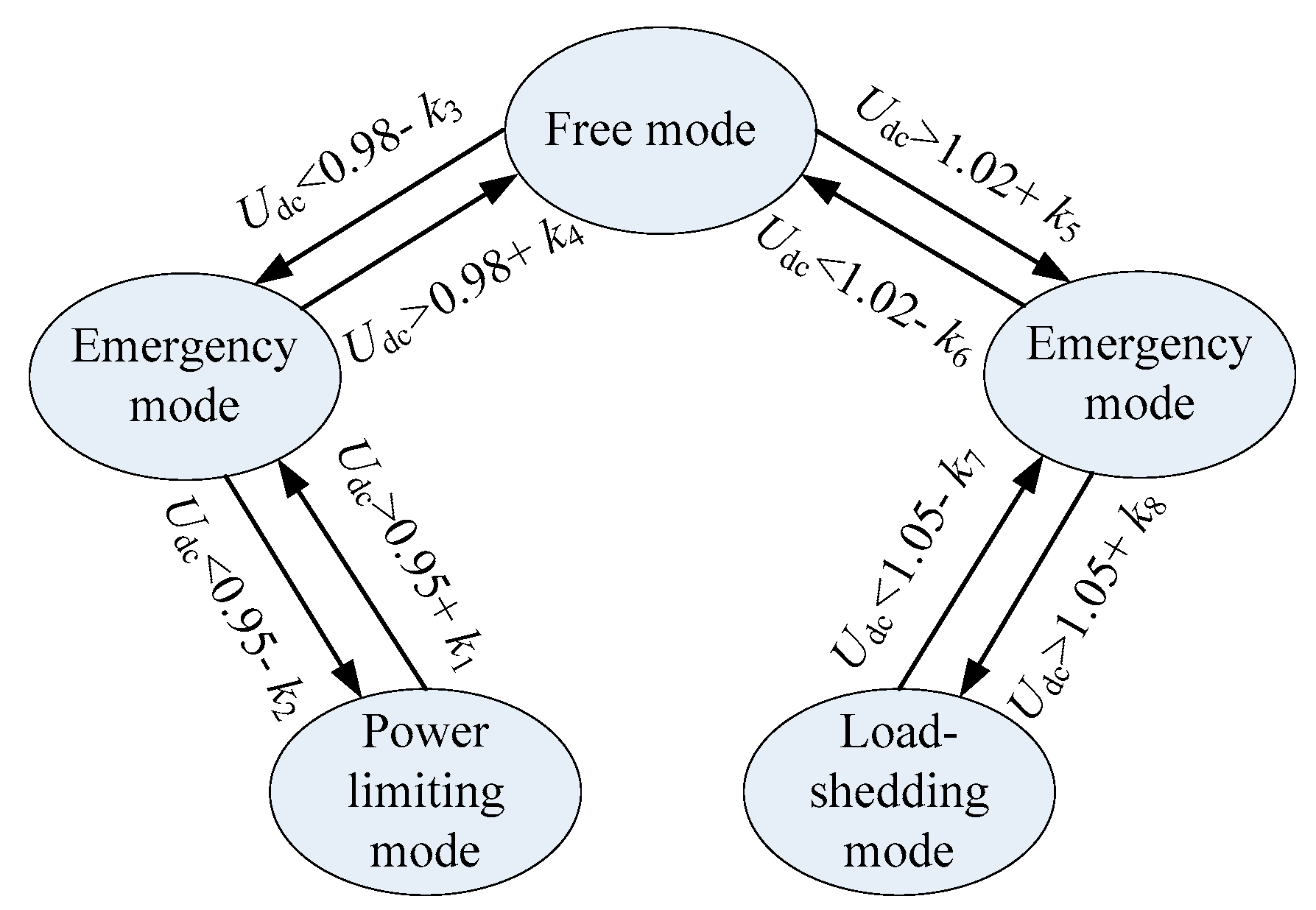
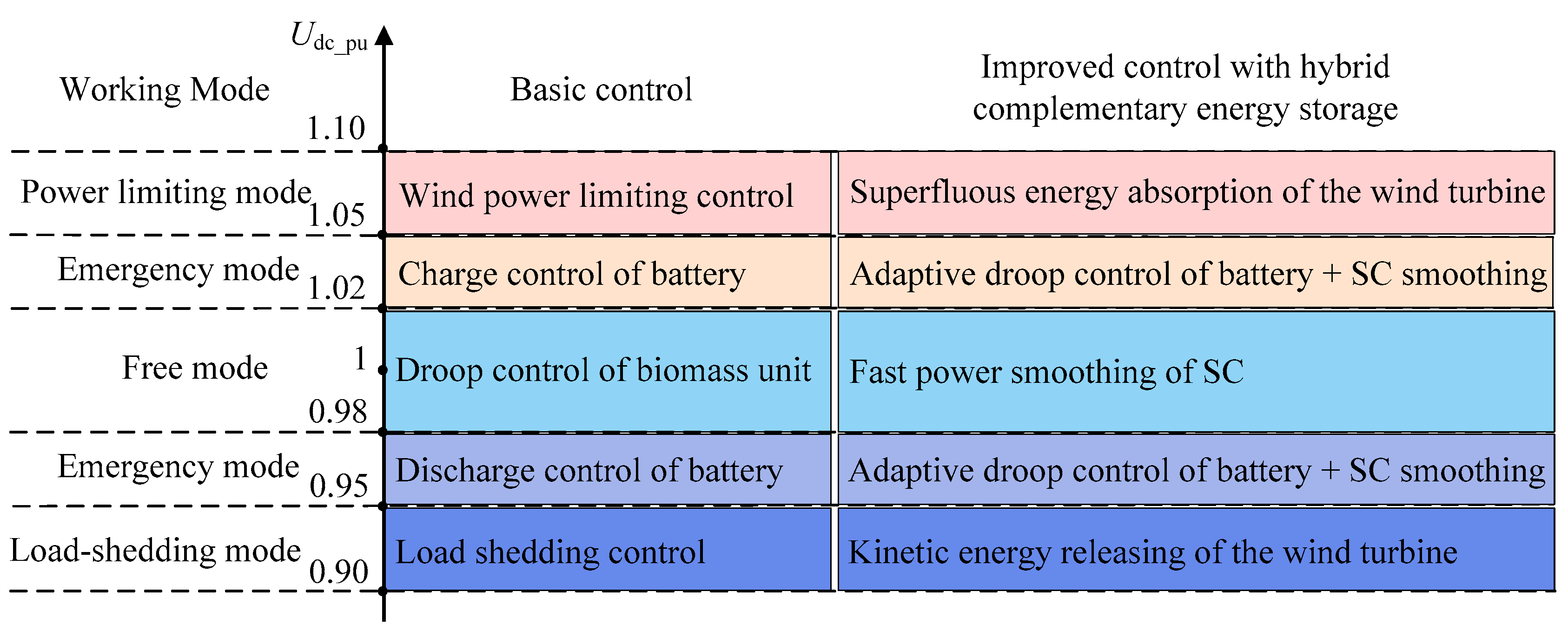
2.2. Operation Mode of the Forest Microgrid
2.2.1. Free Mode
2.2.2. Emergency Mode
2.2.3. Power Limiting Mode
2.2.4. Load-Shedding Mode
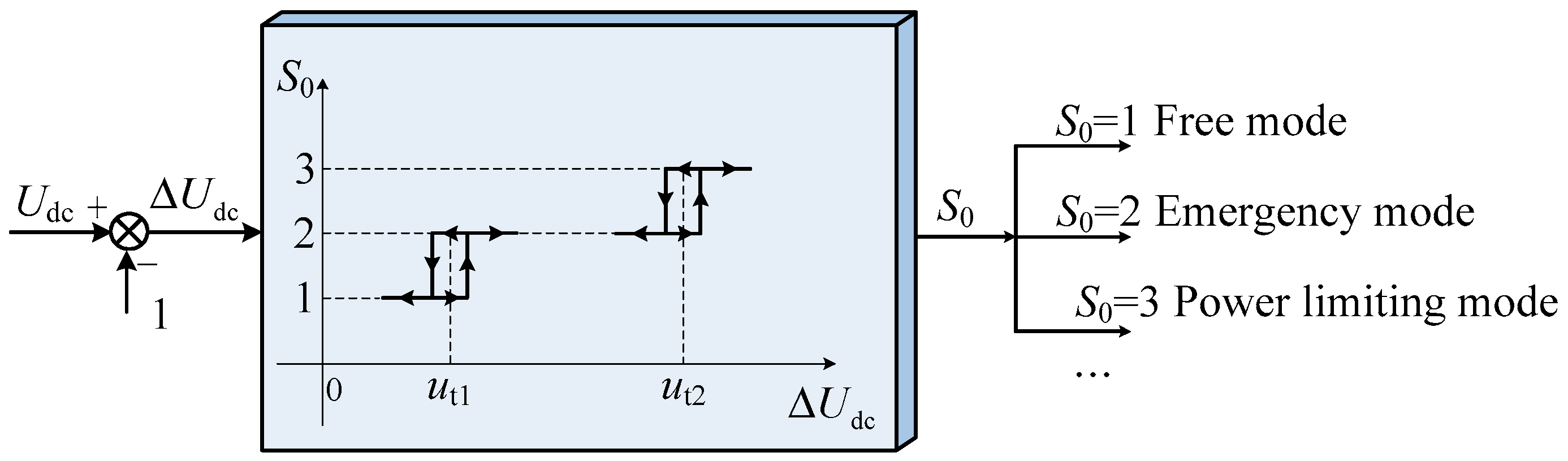
2.3. Coordination Control
3. Hybrid Complementary Energy Storage System
3.1. The Necessity of the Hybrid Complementary Energy Storage
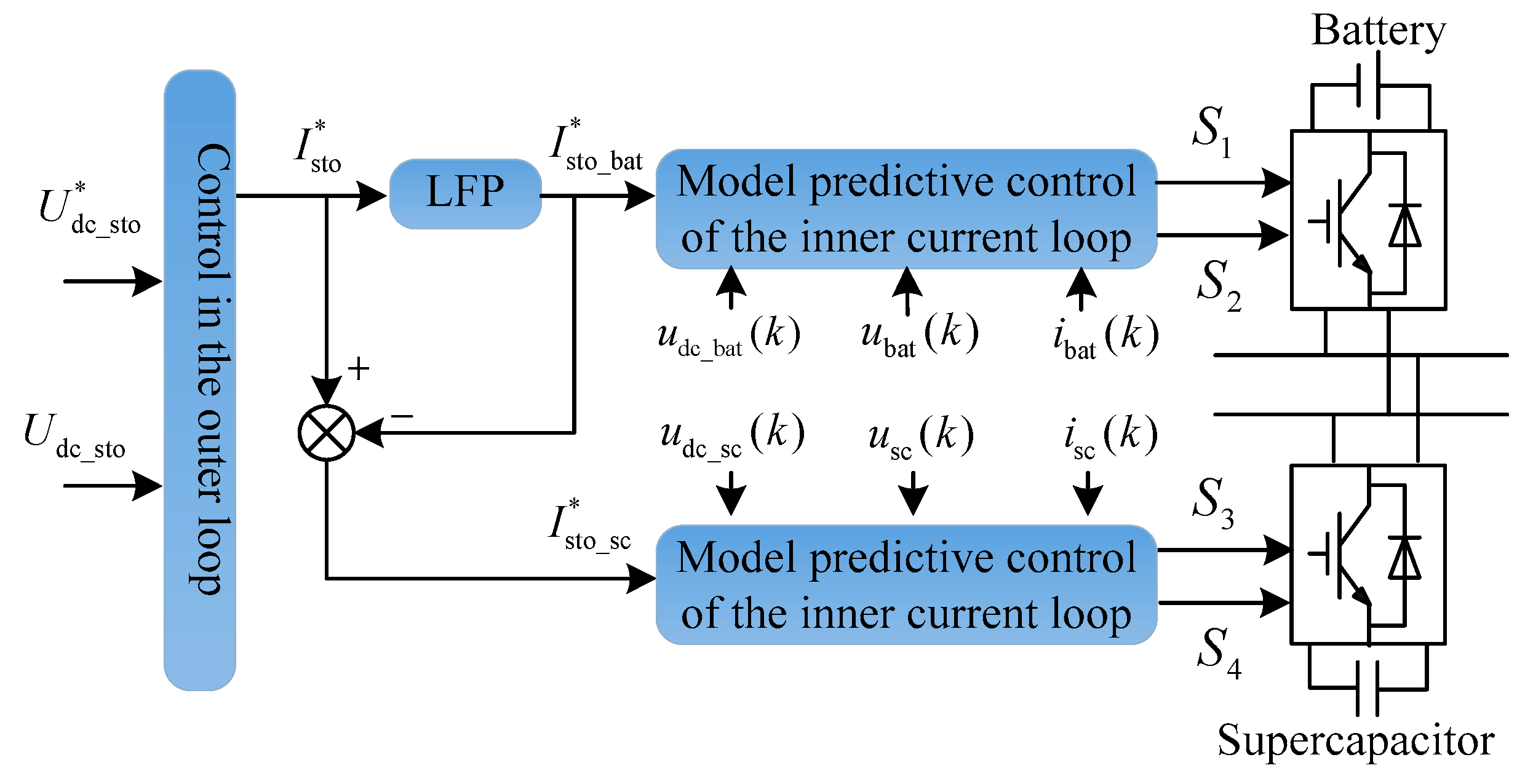
3.2. Improvement in Traditional Control of Batteries and Supercapacitors
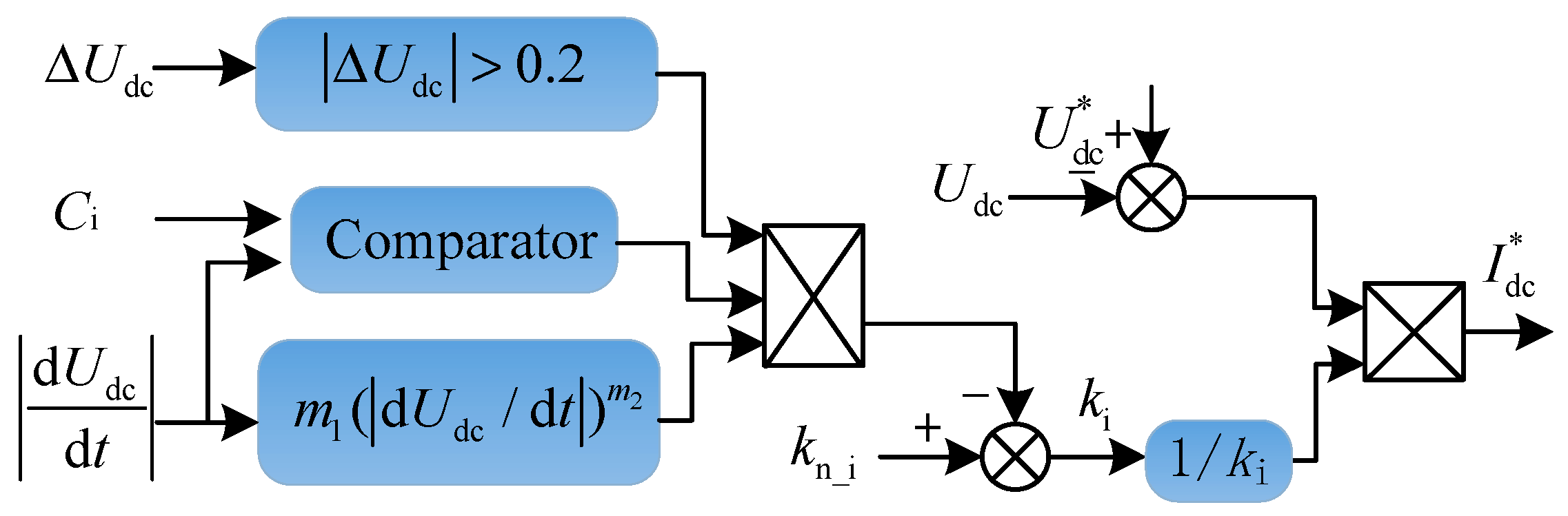
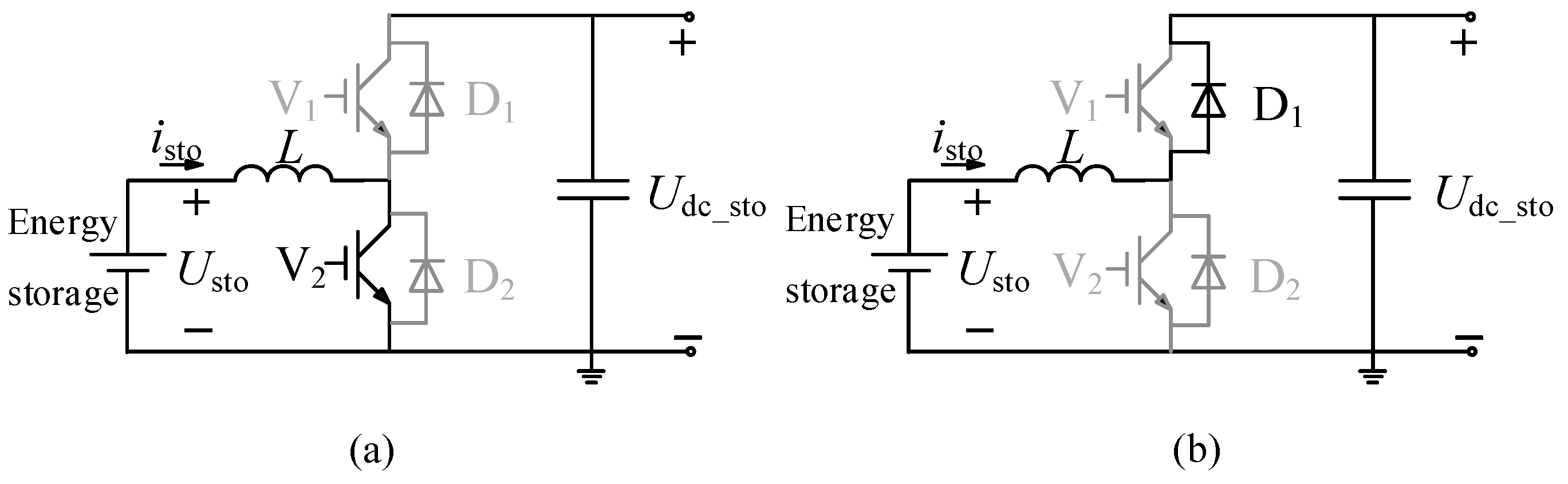
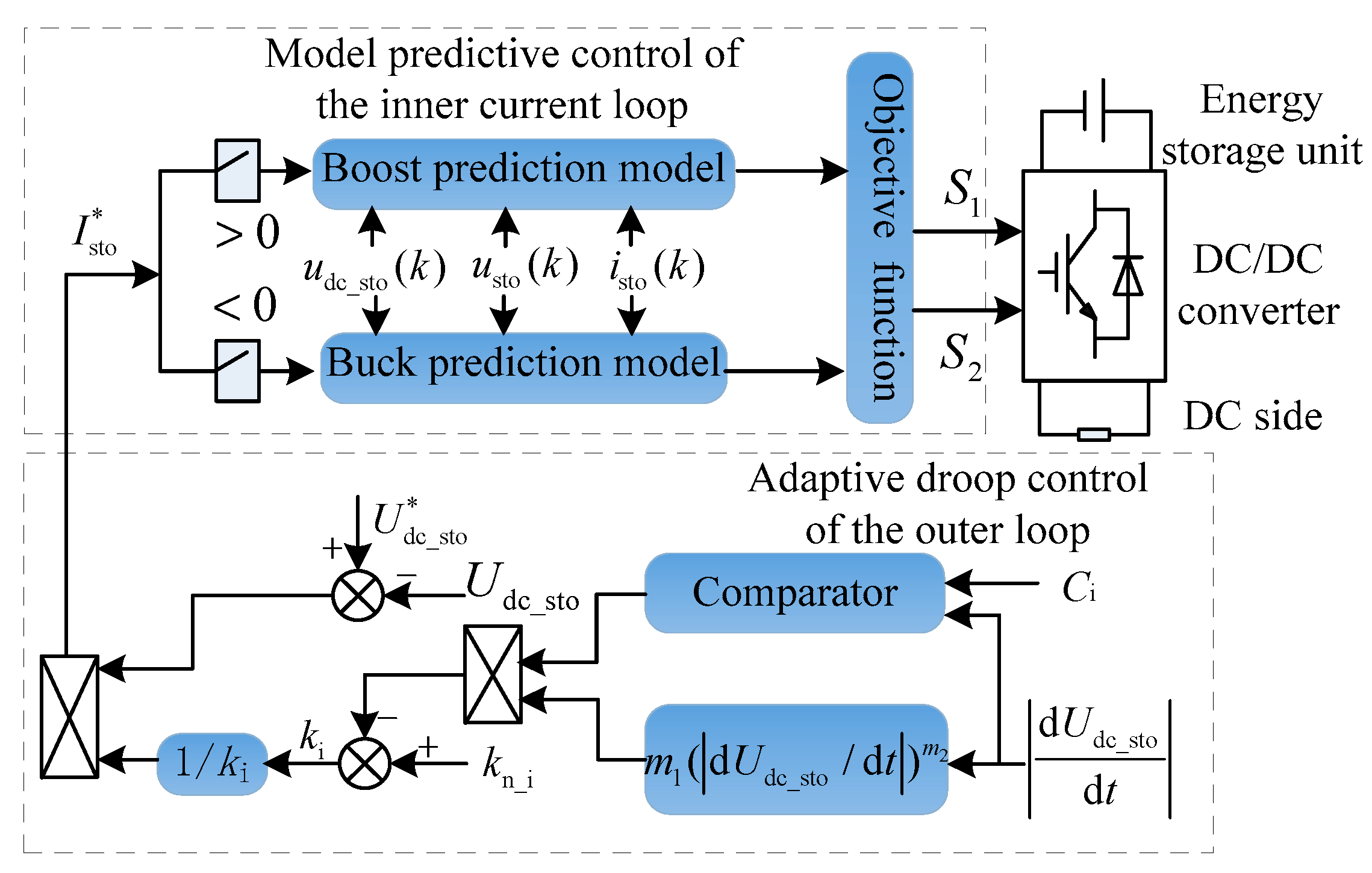
3.3. Predictive Converter Control Method
3.3.1. Current Prediction Model of Converter
3.3.2. Objective Function of the Converter Predictive Control
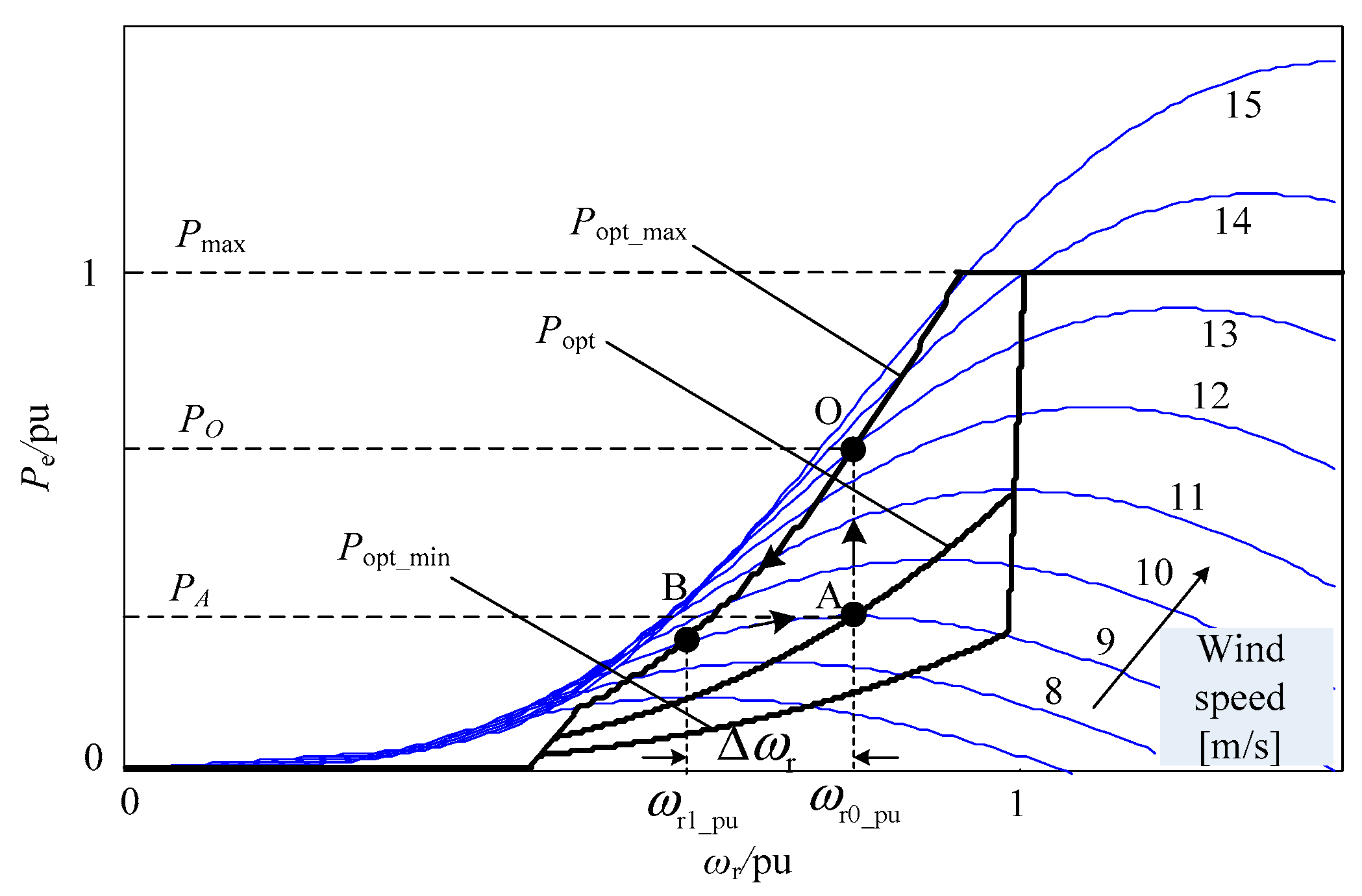
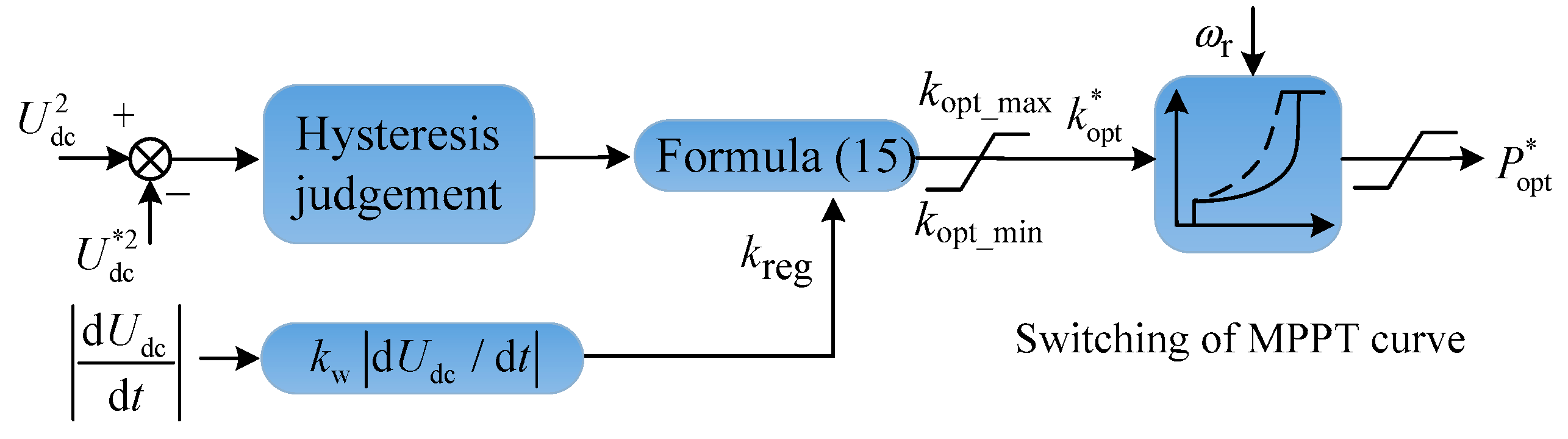
3.4. Control of the Energy Stored in the Wind Turbine
4. Overall Control of the Forest Microgrid
5. Simulation Analysis
5.1. Main Settings of the Simulations
5.2. Simulation Analysis with Fault in the Biomass Unit
5.3. Simulation Analysis with Fluctuating Loads
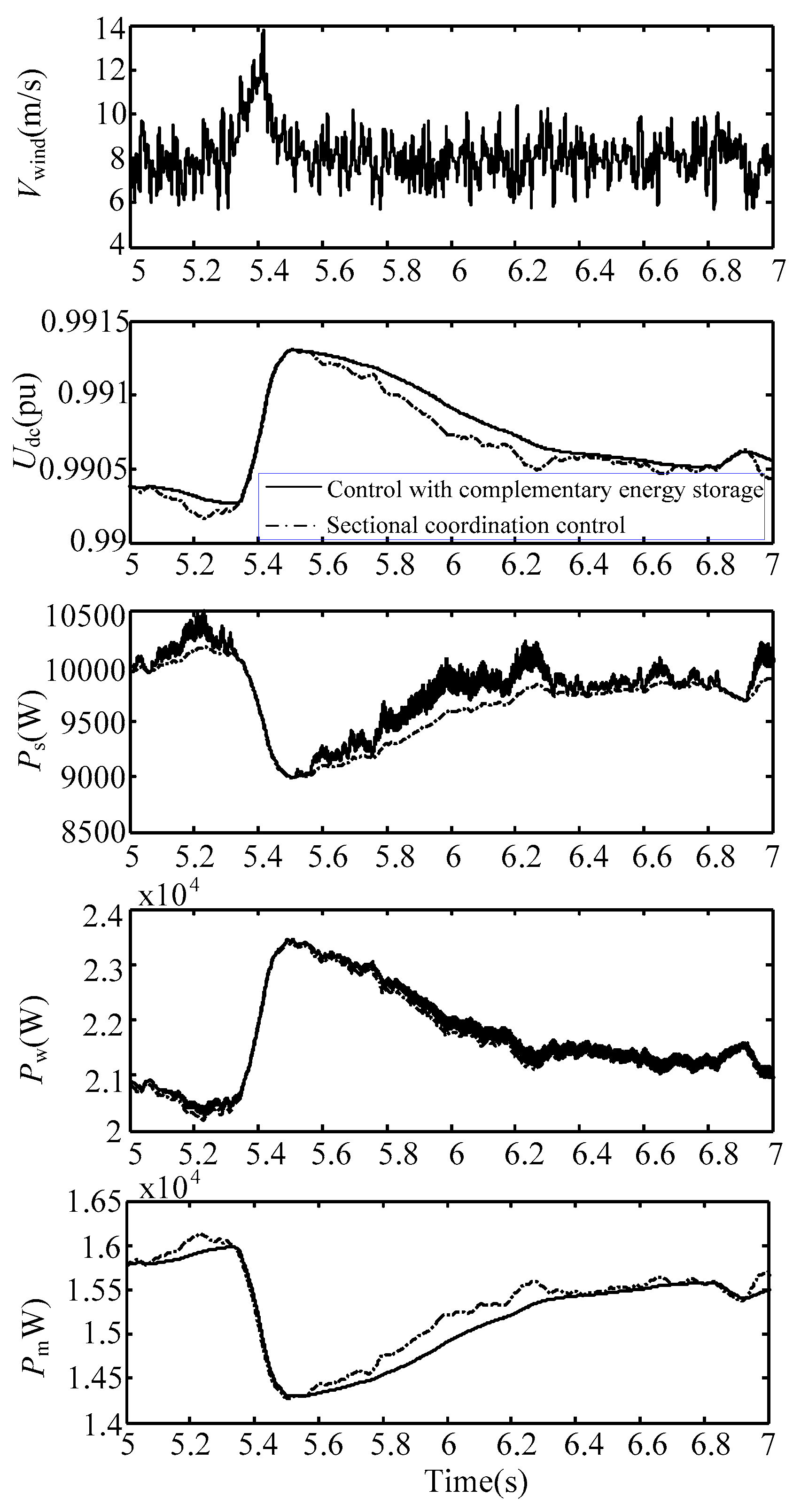
5.4. Simulation Analysis with Simulated Natural Wind Speed Similar to the Actual One
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| ibat(k) | Current of the battery at the kth moment |
| isc(k) | Current of the supercapacitor at the kth moment |
| Pw | Power generated by the wind turbine. |
| Psc | Power of the supercapacitor. |
| Pb | Power of the battery. |
| Pm | Power generated by the biomass unit. |
| Pli | Power consumed by load i. |
| P*opt | Reference power of the wind power system |
| Udc | DC voltage of the main DC bus |
| Udc_m | DC voltage at the outlet of the biomass unit |
| Udc_w | DC voltage at the outlet of the wind power unit |
| Udc_b | DC voltage at the outlet of the battery unit |
| Udc_l | DC voltage at the outlet of load |
| Udc_sto | DC voltage at the outlet of energy storage unit |
| U*dc_sto | Reference value of the DC voltage at the outlet of energy storage unit |
| ubat(k) | Voltage of the battery at the kth moment |
| udc_bat(k) | DC side voltage of the battery converter at the kth moment |
| usc(k) | Voltage of the supercapacitor at the kth moment |
| udc_sc(k) | DC side voltage of the supercapacitor converter at the kth moment |
References
- Jodi, S.B.; Van, B.; Schwab, T.K.; Volker, C.R. The relative effectiveness of protected areas, a logging ban, and sacred areas for old-growth forest protection in southwest China. Biol. Conserv. 2015, 181, 1–8. [Google Scholar]
- González, J.; Arnau, R.R.J.; Rius, C.A. Optimal sizing of a hybrid grid-connected photovoltaic–wind–biomass power system. Appl. Energy 2015, 154, 752–762. [Google Scholar] [CrossRef]
- Teixeira, R.T.; Santos, A.R.D.; Marcatti, G.E. Forest biomass power plant installation scenarios. Biomass. Bioenerg. 2018, 108, 35–47. [Google Scholar] [CrossRef]
- Soliño, M.; Prada, A.; Vázquez, M.X. Green electricity externalities: forest biomass in an Atlantic European Region. Biomass. Bioenerg. 2009, 33, 407–414. [Google Scholar] [CrossRef]
- Martin, C.; Rocco, H.; Brandon, S. Climate change and power security: power load prediction for rural electrical microgrids using long short term memory and artificial neural networks. Appl. Sci. 2018, 8, 749. [Google Scholar]
- Schonberger, J.; Duke, R.; Round, S.D. DC-bus signaling: a distributed control strategy for a hybrid renewable nanogrid. IEEE Trans. Ind. Electron. 2006, 53, 1453–1460. [Google Scholar] [CrossRef]
- Peng, W.; Feng, C.; Che, A. Bi-Objective scheduling of fire engines for fighting forest fires: new optimization approaches. IEEE Trans. Intell. Transp. Syst. 2017, 99, 1–12. [Google Scholar]
- Park, H.; Turner, N.; Higgs, E. Exploring the potential of food forestry to assist in ecological restoration in North America and beyond. Restor. Ecol. 2017, 26, 284–293. [Google Scholar] [CrossRef]
- Kowalczyk, I. Barriers to the expansion of electrical cogeneration by the wood products industry in the United States. J. Sustain. Forest. 2013, 32, 159–174. [Google Scholar] [CrossRef][Green Version]
- Busarello, T.D.C.; Paredes, H.K.M.; Pomilio, J.A. Synergistic operation between battery energy storage and photovoltaic generator systems to assist management of microgrids. IET. Gener. Transm. Dis. 2018, 12, 2944–2951. [Google Scholar] [CrossRef]
- Tan, M.; Cintuglu, M.H.; Mohammed, O.A. Control of a hybrid AC/DC microgrid involving energy storage and pulsed loads. IEEE Trans. Ind. Appl. 2017, 53, 567–575. [Google Scholar]
- Karavas, C.S.; Arvanitis, K.G.; Kyriakarakos, G. A novel autonomous PV powered desalination system based on a DC microgrid concept incorporating short-term energy storage. Sol. Energy 2018, 159, 947–961. [Google Scholar] [CrossRef]
- Sun, X.; Hao, Y.; Wu, Q. A multifunctional and wireless droop control for distributed energy storage units in islanded AC microgrid applications. IEEE Trans. Power. Electr. 2017, 32, 736–751. [Google Scholar] [CrossRef]
- Korada, N.; Mishra, M.K. Grid adaptive power management strategy for an integrated microgrid with hybrid energy storage. IEEE Trans. Ind. Electron. 2017, 64, 2884–2892. [Google Scholar] [CrossRef]
- Garcia-Torres, F.; Bordons, C. Optimal economical schedule of hydrogen-based microgrids with hybrid storage using model predictive control. IEEE Trans. Ind. Electron. 2015, 62, 5195–5207. [Google Scholar] [CrossRef]
- Garcia-Torres, F.; Bordons, C.; Ridao, M.A. Optimal economic schedule for a network of microgrids with hybrid energy storage system using distributed model predictive control. IEEE Trans. Ind. Electron. 2019, 66, 1919–1929. [Google Scholar] [CrossRef]
- Garcia-Torres, F.; Valverde, L.; Bordons, C. Optimal load sharing of hydrogen-based microgrids with hybrid storage using model-predictive control. IEEE Trans. Ind. Electron. 2016, 63, 4919–4928. [Google Scholar] [CrossRef]
- Xiao, J.; Peng, W.; Setyawan, L. Hierarchical control of hybrid energy storage system in DC microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4915–4924. [Google Scholar] [CrossRef]
- Xu, Q.; Hu, X.; Peng, W. A decentralized dynamic power sharing strategy for hybrid energy Storage system in autonomous DC microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5930–5941. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Robust optimal power management system for a hybrid AC/DC micro-grid. IEEE Trans. Sustain. Energ. 2015, 6, 675–687. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Fault-tolerant supervisory controller for a hybrid AC/DC micro-grid. IEEE Trans. Smart Grid 2018, 9, 2809–2823. [Google Scholar] [CrossRef]
- Chang, X.; Li, Y.; Xuan, L. An active damping method based on a supercapacitor energy storage system to overcome the destabilizing effect of instantaneous constant power loads in DC microgrids. IEEE Trans. Energy Conver. 2017, 32, 36–47. [Google Scholar] [CrossRef]
- Zhang, Y.; Yun, W.L. Energy management strategy for supercapacitor in droop-controlled DC microgrid using virtual impedance. IEEE Trans. Power. Electr. 2017, 32, 2704–2716. [Google Scholar] [CrossRef]
- Awad, E.A.; Badran, E.A.; Youssef, F.H. Mitigation of switching overvoltages in microgrids based on SVC and supercapacitor. IET. Gener. Transm. Dis. 2017, 12, 355–362. [Google Scholar] [CrossRef]
- Lu, X.; Sun, K.; Guerrero, J.M. Stability enhancement based on virtual impedance for DC microgrids with constant power loads. IEEE Trans. Smart Grid 2017, 6, 2770–2783. [Google Scholar] [CrossRef]
- Bui, T.; Kim, C.H.; Kim, K.H.; Sang, B.R. A modular cell balancer based on multi-winding transformer and switched-capacitor circuits for a series-connected battery string in electric vehicles. Appl. Sci. 2018, 8, 1278. [Google Scholar] [CrossRef]
- Worku, M.Y.; Abido, M.A.; Iravani, R. Power fluctuation minimization in grid connected photovoltaic using supercapacitor energy storage system. J. Renew. Sustain. Energy 2016, 8, 013501. [Google Scholar] [CrossRef]
- Kim, S.K.; Chang, R.P.; Kim, J.S. A stabilizing model predictive controller for voltage regulation of a DC/DC boost converter. IEEE Trans. Control Syst. Technol. 2014, 22, 2016–2023. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Symbol | Value |
|---|---|---|
| Rated power of micro-gas turbine system | PmN | 65 kW |
| Rated voltage of micro-gas turbine | UmN | 400 V |
| Rated voltage of battery | UbN | 180 V |
| Rated capacity of battery | PbN | 100 A h |
| Rated capacity of battery converter | Pb_DCN | 40 kW |
| Rated capacity of supercapacitor converter | PSCN | 40 kW |
| Rated speed of the wind turbine | ωN | 75 r/min |
| Number of wind turbine | Nw | 2 |
| Rated capacity of the wind turbine | PwN | 50 kW |
| Rated voltage of DC bus | UdcN | 400 V |
| Sampling period | Ts | 50 μs |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Zhang, J.; Liu, H. Improved Control of Forest Microgrids with Hybrid Complementary Energy Storage. Appl. Sci. 2019, 9, 2523. https://doi.org/10.3390/app9122523
Yu M, Zhang J, Liu H. Improved Control of Forest Microgrids with Hybrid Complementary Energy Storage. Applied Sciences. 2019; 9(12):2523. https://doi.org/10.3390/app9122523
Chicago/Turabian StyleYu, Ming, Junguo Zhang, and Hanxing Liu. 2019. "Improved Control of Forest Microgrids with Hybrid Complementary Energy Storage" Applied Sciences 9, no. 12: 2523. https://doi.org/10.3390/app9122523
APA StyleYu, M., Zhang, J., & Liu, H. (2019). Improved Control of Forest Microgrids with Hybrid Complementary Energy Storage. Applied Sciences, 9(12), 2523. https://doi.org/10.3390/app9122523