Seismic Design of Steel Moment-Resisting Frames with Damping Systems in Accordance with KBC 2016

Abstract
1. Introduction
2. KBC2016 Seismic Design Provisions for Structures with Damping Systems [2]
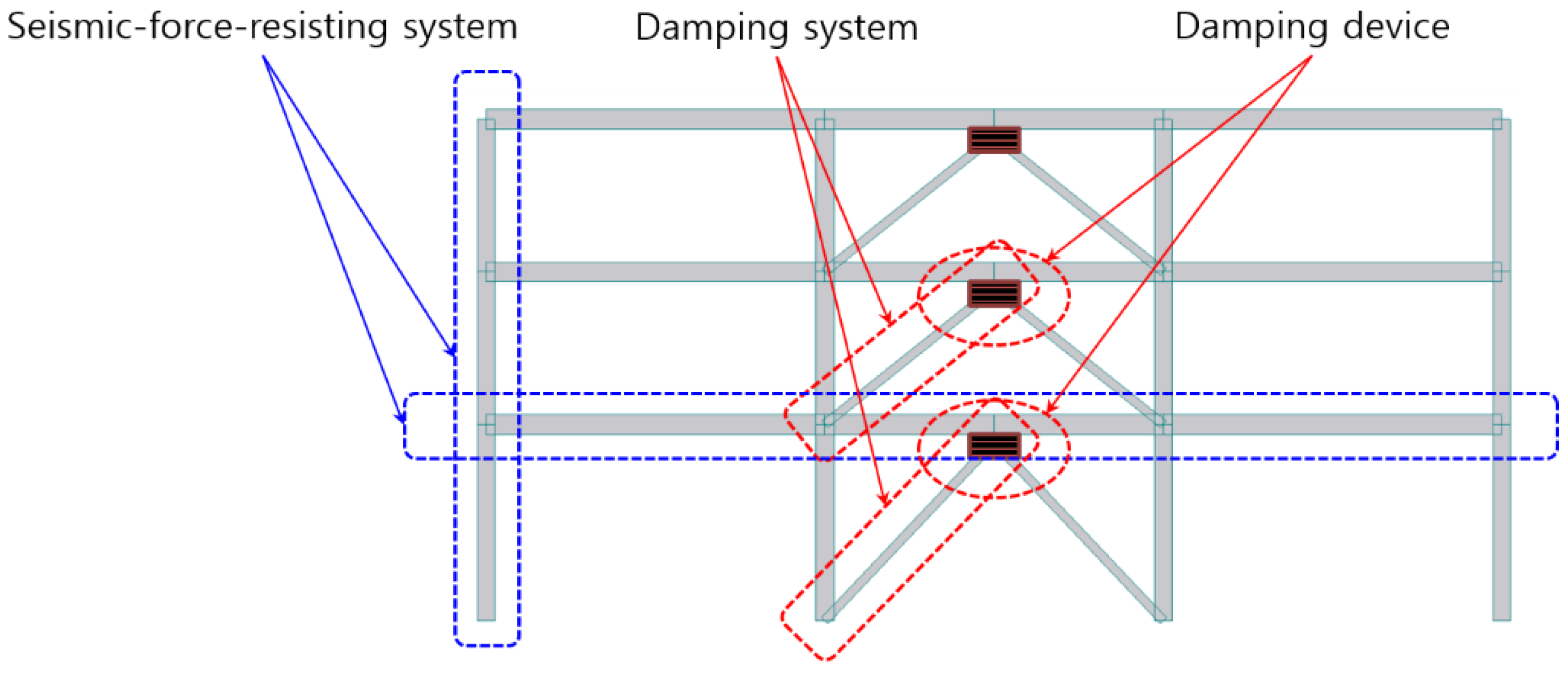
2.1. Damping Systems
2.2. Seismic-Force-Resisting System
2.3. Damping Performance
3. Damping System Design Procedure
3.1. Elastic Design of Seismic-Force-Resisting Systems
3.2. Target Damping Ratio Calculation
3.3. Damping Device Design
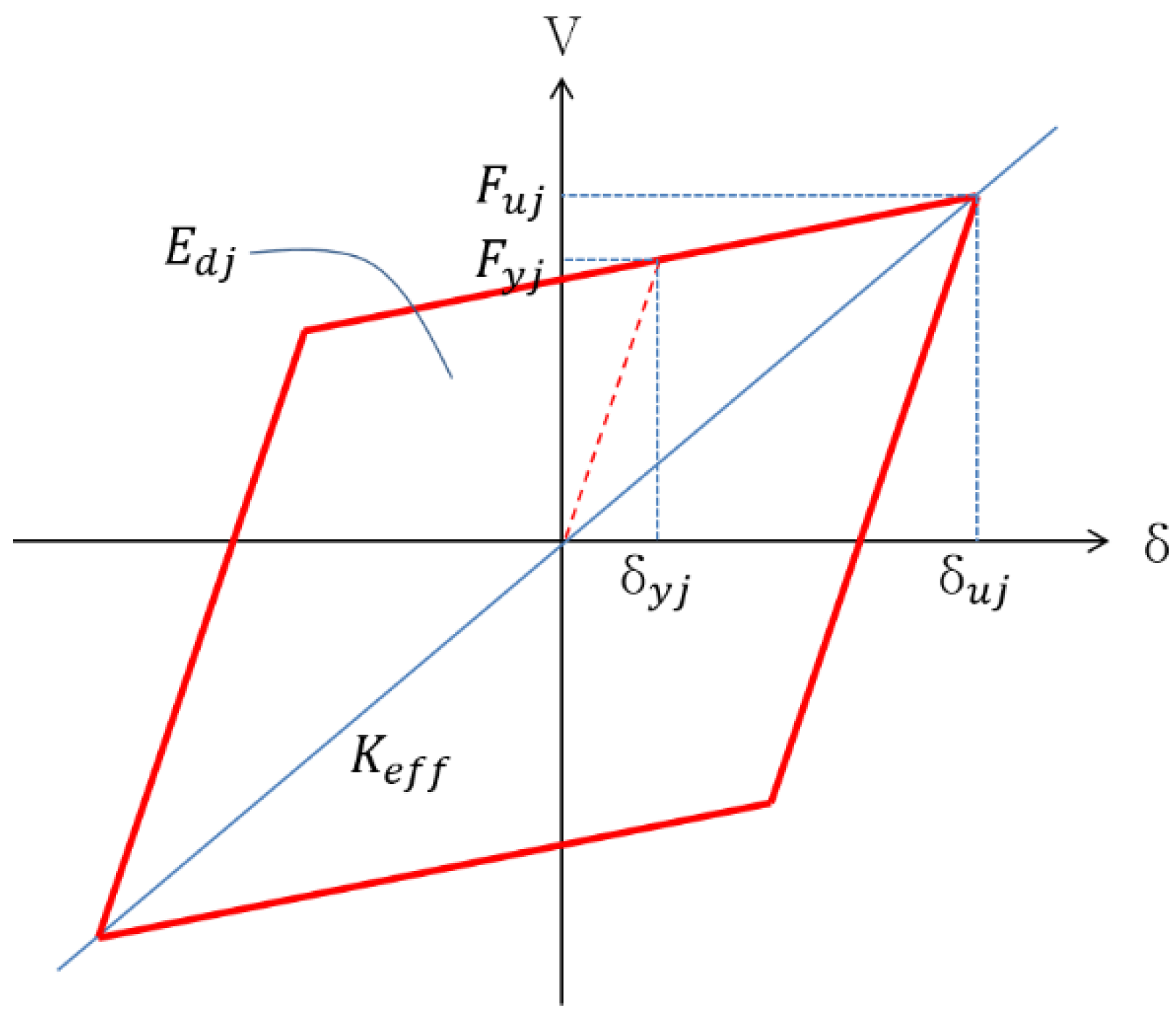
3.3.1. Effective Damping of Displacement-Dependent Damping Devices
3.3.2. Effective Damping of Velocity-Dependent Damping Devices
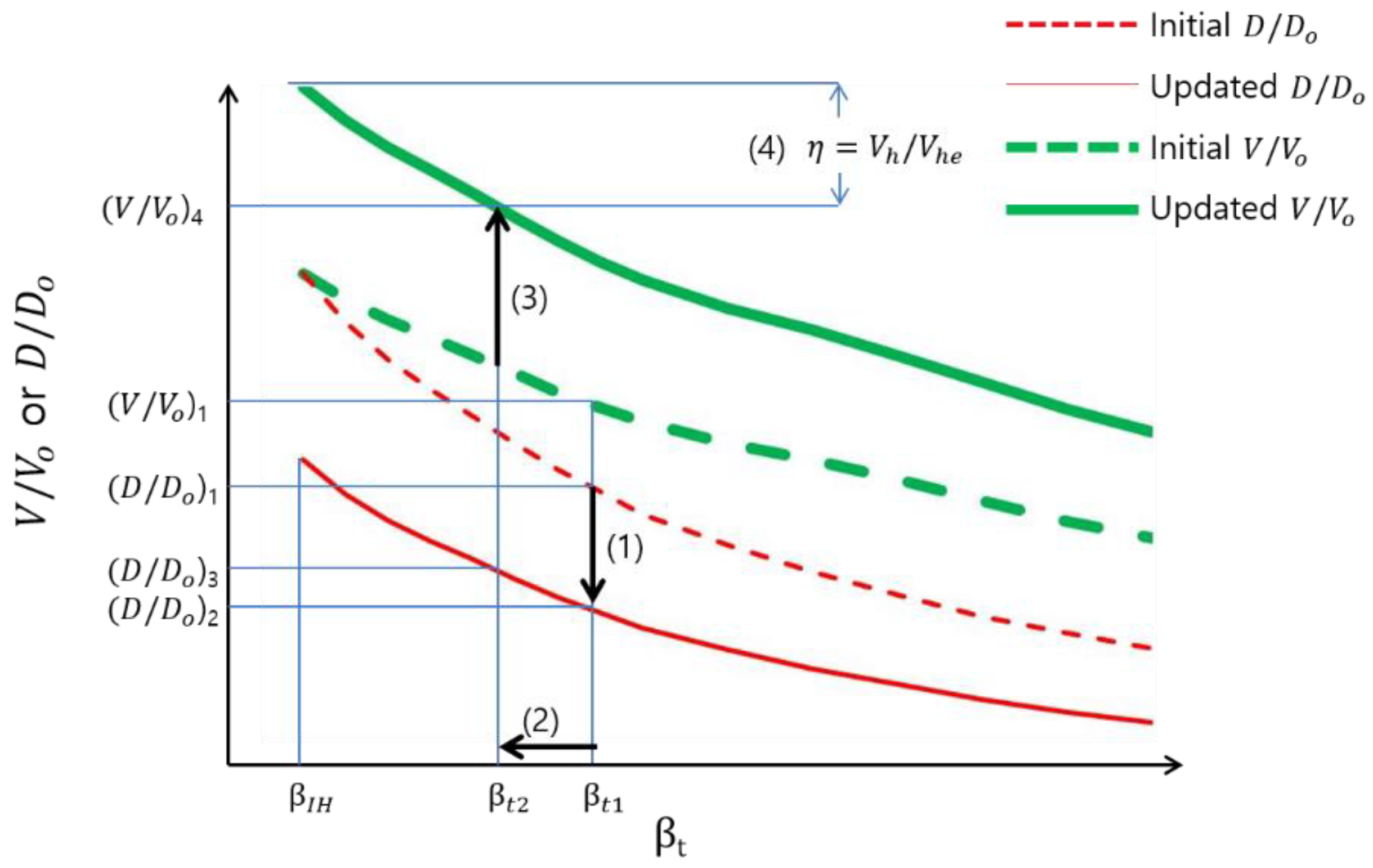
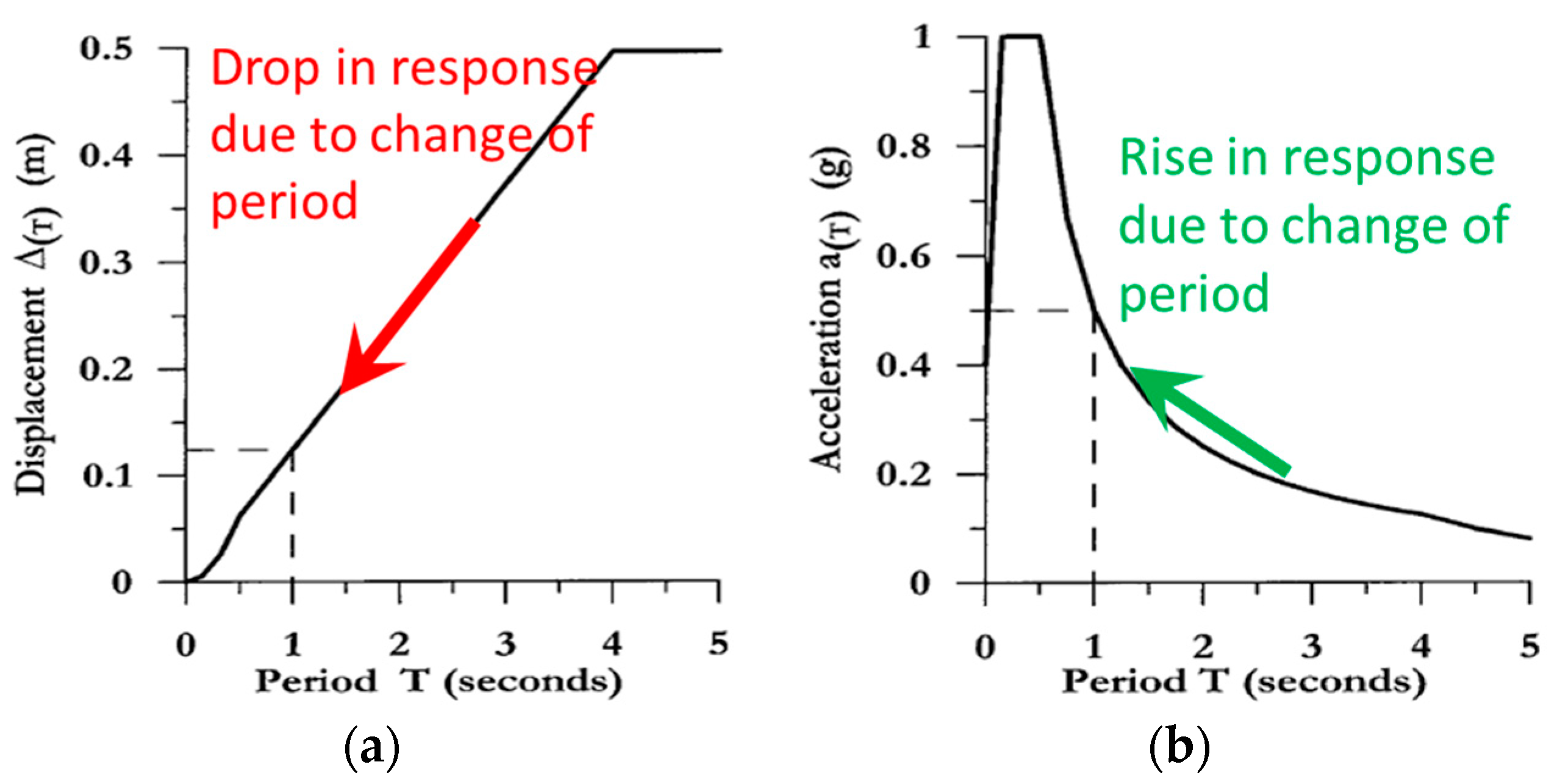
3.3.3. Design of Damping Devices Considering Change of the Natural Frequency
4. Design Example
4.1. Nonlinear Modeling of Structural Elements
4.2. Three-Story Steel Moment-Resisting Frames with Metallic Yielding Dampers (3F-OMRF-MD)
4.2.1. Initial Design of Seismic-Force-Resisting System
4.2.2. Design of Displacement-Dependent Damping Devices
4.3. Six-Story Steel Moment Frames with Viscoelastic Dampers (6F-SMRF-VED)
4.3.1. Initial Design of Seismic-Force-Resisting System
4.3.2. Design of Velocity-Dependent Damping Devices
5. Conclusions
- The proposed design procedure makes use of nonlinear response history analysis, but does not repeat time-consuming nonlinear response history analysis until convergence of design solution. Instead, design parameters of damping devices are determined using the response reduction curve prescribed by a limited number of response history analyses. Only five times of response history analysis is sufficient for practical application.
- The proposed design procedure can predict seismic response of nonlinear structures with considerable accuracy because basic response reduction factors are obtained through nonlinear response history although equivalent linearization technique is used partially to estimate effects of damping devices with limited computational efforts.
- The proposed design procedure does not require an optimization procedure and can be conducted using commercial structural analysis software. However, the proposed design procedure provides a systematic process to update the design parameters of damping devices and converges to a final design meeting design goals.
- The proposed design procedure for structures with damping systems can reduce structural materials of seismic-force-resisting systems efficiently by 30 to 50% compared to those without damping systems as illustrated by design examples for steel moment-resisting frames.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Architectural Institute of Korea. AIK Korean Building Code. KBC 2009; AIK: Seoul, Korea, 2009. [Google Scholar]
- Architectural Institute of Korea. AIK Korean Building Code. KBC 2016; AIK: Seoul, Korea, 2016. [Google Scholar]
- American Society of Civil Engineers, Structural Engineering Institute. ASCE/SEI 7-16. Minimum Design Loads for Buildings and Other Structures; ASCE: Reston, VA, USA, 2016. [Google Scholar]
- Lin, Y.Y.; Tsai, M.H.; Whang, J.S.; Chang, K.C. Direct displacement-based design for building with passive energy dissipation systems. Eng. Struct. 2003, 25, 25–37. [Google Scholar] [CrossRef]
- Ramirez, O.M.; Constantinou, M.C.; Whittaker, A.S.; Kircher, C.A.; Johnson, M.W.; Chrysostomou, C.Z. Validation of the 2000 NEHRP provisions’ equivalent lateral force and modal analysis procedures for buildings with damping systems. Earthq. Spectra 2003, 19, 981–999. [Google Scholar] [CrossRef]
- Whittaker, A.S.; Constantinou, M.C.; Ramirez, O.M.; Johnson, M.W.; Chrysostomou, C.Z. Equivalent lateral force and modal analysis procedures of the 2000 NEHRP provisions for buildings with damping systems. Earthq. Spectra 2003, 19, 959–980. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Chang, K.C.; Chen, C.Y. Direct displacement-based design for seismic retrofit of existing buildings using nonlinear viscous dampers. Bull. Earthq. Eng. 2008, 6, 535–552. [Google Scholar] [CrossRef]
- Silvestri, S.; Gasparini, G.; Trombetti, T. A five-step procedure for the dimensioning of viscous dampers to be inserted in building structures. J. Earthq. Eng. 2010, 14, 417–447. [Google Scholar] [CrossRef]
- Sullivan, T.J.; Lago, A. Towards a simplified direct DBD procedure for the seismic design of moment resisting frames with viscous dampers. Eng. Struct. 2012, 35, 140–148. [Google Scholar] [CrossRef]
- Palermo, M.; Silvestri, S.; Landi, L.; Gasparini, G.; Trombetti, T. A “direct five-step procedure” for the preliminary seismic design of buildings with added viscous dampers. Eng. Struct. 2018, 173, 933–950. [Google Scholar] [CrossRef]
- Kim, J.K.; Choi, H.H.; Min, K.W. Performance-based design of added viscous dampers using capacity spectrum method. J. Earthq. Eng. 2003, 7, 1–24. [Google Scholar] [CrossRef]
- Lin, Y.Y.; Chang, K.C. An improved capacity spectrum method for ATC-40. Earthq. Eng. Struct. Dyn. 2003, 32, 2013–2025. [Google Scholar] [CrossRef]
- Ramirez, O.M.; Constantinou, M.C.; Gomez, J.D.; Whittaker, A.S.; Chrysostomou, C.Z. Evaluation of simplified methods of analysis of yielding structures with damping systems. Earthq. Spectra 2002, 18, 501–530. [Google Scholar] [CrossRef]
- Park, J.-H. Seismic response of SDOF systems representing masonry-infilled RC frames with damping systems. Eng. Struct. 2013, 56, 1735–1750. [Google Scholar] [CrossRef]
- Chae, Y.; Ricles, J.M.; Sause, R. Development of equivalent linear systems for single-degree-of-freedom structures with magneto-rheological dampers for seismic design application. J. Intell. Mater. Syst. Struct. 2017, 28, 2675–2687. [Google Scholar] [CrossRef]
- Newmark, N.M.; Hall, W.J. Earthquake Spectra and Design; Earthquake Engineering Research Institute: Berkeley, CA, USA, 1982; pp. 35–36. [Google Scholar]
- Priestley, M.J.N.; Calvi, G.M.; Kowalsky, M.J. Displacement-Based Seismic Design of Structures; IUSS Press: Pavia, Italy, 2007. [Google Scholar]
- Park, J.-H.; Kim, J.; Min, K.-W. Optimal design of added viscoelastic dampers and supporting braces. Earthq. Eng. Struct. Dyn. 2004, 33, 465–484. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Earthquake protection of structures with nonlinear viscous dampers optimized through an energy-based stochastic approach. Eng. Struct. 2019, 179, 523–539. [Google Scholar] [CrossRef]
- Ontiveros-Perez, S.P.; Miguel, L.F.F.; Riera, J.D. Reliability-based optimum design of passive friction dampers in buildings in seismic regions. Eng. Struct. 2019, 190, 276–284. [Google Scholar] [CrossRef]
- Lavan, O.; Levy, R. Optimal design of supplemental viscous dampers for irregular shear-frames in the presence of yielding. Earthq. Eng. Struct. Dyn. 2005, 34, 889–907. [Google Scholar] [CrossRef]
- Lavan, O. A methodology for the integrated seismic design of nonlinear buildings with supplemental damping. Struct. Control Health Monit. 2015, 22, 484–499. [Google Scholar] [CrossRef]
- Wang, S.; Mahin, S.A. High-performance computer-aided optimization of viscous dampers for improving the seismic performance of a tall building. Soil Dyn. Earthq. Eng. 2018, 113, 454–461. [Google Scholar] [CrossRef]
- Ramirez, O.M.; Constantinou, M.C.; Kircher, C.A.; Whittaker, A.S.; Johnson, M.W.; Gomez, J.D.; Chrysostomou, C.Z. Development and Evaluation of Simplified Procedures for the Analysis and Design of Buildings with Passive Energy Dissipation Systems; Technical Report MCEER-00-0010; Multidisciplinary Center for Earthquake Engineering Research, University at Buffalo: Buffalo, NY, USA, 2000. [Google Scholar]
- Manson, S.S. Behavior of Materials under Conditions of Thermal Stress. In Heat Transfer Symposium; Engineering Research Institute, University of Michigan: Ann Arbor, MI, USA, 1953; pp. 9–75. [Google Scholar]
- Coffin, L.F., Jr. A Study of Effects of Cyclic Thermal Stresses on a Ductile Metal. Trans. Am. Soc. Mech. Eng. N. Y. 1954, 76, 931–950. [Google Scholar]
- Koh, S.K.; Stephens, R.I. Mean Stress Effects on Low Cycle Fatigue for High Strength Steel. Fatigue Fract. Eng. Mater. Struct. 1991, 14, 413–428. [Google Scholar] [CrossRef]
- Mander, J.R.; Panthaki, F.D.; Kasalanati, A. Low-Cycle Fatigue Behavior of Reinforcing Steel. J. Mater. Civ. Eng. 1994, 6, 453–467. [Google Scholar] [CrossRef]
- American Society of Civil Engineers, Structural Engineering Institute. ASCE/SEI 7-10. Minimum Design Loads for Buildings and Other Structures; ASCE: Reston, VA, USA, 2010. [Google Scholar]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; John Wiley & Sons Ltd.: London, UK; New York, NY, USA, 1997. [Google Scholar]
- Chang, K.C.; Lai, M.L.; Soong, T.T.; Hao, D.S.; Yeh, Y.C. Seismic Behavior and Design Guidelines for Steel Frame Structures with Added Viscoelastic Dampers; Technical Report MCEER-93-0009; Multidisciplinary Center for Earthquake Engineering Research, University at Buffalo: Buffalo, NY, USA, 1993. [Google Scholar]
- Pekelnicky, R.; Engineers, S.D.; Chris Poland, S.E.; Engineers, N.D. ASCE 41-13: Seismic Evaluation and Retrofit Rehabilitation of Existing Buildings. In Proceedings of the SEAOC 2012 Convention, Santa Fe, NM, USA, 12–15 September 2012. [Google Scholar]
- Krawinkler, H. Shear in beam-column joints in seismic design of steel frames. Eng. J. 1978, 15, 82–91. [Google Scholar]
- Lee, S.-H.; Park, J.-H.; Lee, S.-K.; Min, K.-W. Allocation and slip load of friction dampers for a seismically excited building structure based on storey shear force distribution. Eng. Struct. 2008, 30, 930–940. [Google Scholar] [CrossRef]
- Nabid, N.; Hajirasouliha, I.; Petkovski, M. A Practical Method for Optimum Seismic Design of Friction Wall Dampers. Earthq. Spectra 2017, 33, 1033–1052. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steel Moment-Resisting Frame Systems | Design Coefficients | ||
|---|---|---|---|
| Response Modification Factor | Overstrength Factor | Deflection Amplification Factor | |
| Special | 8 | 3 | 5.5 |
| Intermediate | 4.5 | 3 | 4 |
| Ordinary | 3.5 | 3 | 3 |
| Temperature (°C) | Frequency (Hz) | Strain (%) | Shear Storage (MPa) | Shear loss (MPa) | Loss Factor |
|---|---|---|---|---|---|
| 24 | 1.0 | 20 | 0.958 | 1.151 | 1.20 |
| Model | Member | Story | Section | Material |
|---|---|---|---|---|
| 3F-OMRF-MD | Beam | 1‒3 | H-506 × 201 × 11/19 | SM490 = 315 MPa = 490 MPa |
| Column | 1‒3 | H-394 × 405 × 18/18 | ||
| Brace | 1‒3 | H-200 × 200 × 8/12 | ||
| 6F-SMRF-VED | Beam | 5‒6 | H-354 × 176 × 8/13 | |
| 3‒4 | H-450 × 200 × 9/14 | |||
| 1‒2 | H-496 × 199 × 9/14 | |||
| Column | 4‒6 | H-414 × 405 × 18/28 | ||
| 1‒3 | H-428 × 407 × 20/35 | |||
| Brace | 1‒6 | H-244 × 252 × 11/11 |
| Floor | Story Force Ratio | (kN) | (kN) | (mm) | (mm) | |
|---|---|---|---|---|---|---|
| 0.141 | 3 | 0.56 | 140 | 147 | 4.6 | 17.2 |
| 2 | 0.82 | 204 | 223 | 4.6 | 24.8 | |
| 1 | 1.00 | 249 | 270 | 5.9 | 30.4 | |
| 0.120 | 3 | 0.57 | 145 | 152 | 4.6 | 15.7 |
| 2 | 0.81 | 209 | 226 | 4.6 | 22.6 | |
| 1 | 1.00 | 255 | 274 | 5.9 | 28.2 |
| Seismic Design Model | Story | Story Drift Ratio (%) | Member Section (DCR) | Weight (kN) |
|---|---|---|---|---|
| 3F-OMRF-MD (with damping devices) | 3 | 0.48 | Beam: H-506 × 201 × 11/19 (0.79) Column: H-394 × 405 × 18/18 (0.81) Brace: H-200 × 200 × 8/12 (0.29) | 149 |
| 2 | 0.65 | |||
| 1 | 0.66 | |||
| 3F-OMRF-SD (without damping devices) | 3 | 0.39 | Beam: H-692 × 300 × 13/20 (0.57) Column: H-428 × 407 × 20/35 (0.58) | 221 |
| 2 | 0.59 | |||
| 1 | 0.61 |
| Seismic Risk Category | Importance Factor | Story | Story-Drift Ratio without Damping Devices (%) | Allowable Story-Drift Ratio (%) | |
|---|---|---|---|---|---|
| Equivalent Static Analysis | Nonlinear Response History Analysis | ||||
| S | 1.5 | 6 | 1.32 | 1.24 | 1.00 |
| 5 | 1.59 | 1.28 | |||
| 4 | 1.75 | 1.31 | |||
| 3 | 1.75 | 1.48 | |||
| 2 | 1.54 | 1.39 | |||
| 1 | 0.93 | 0.76 | |||
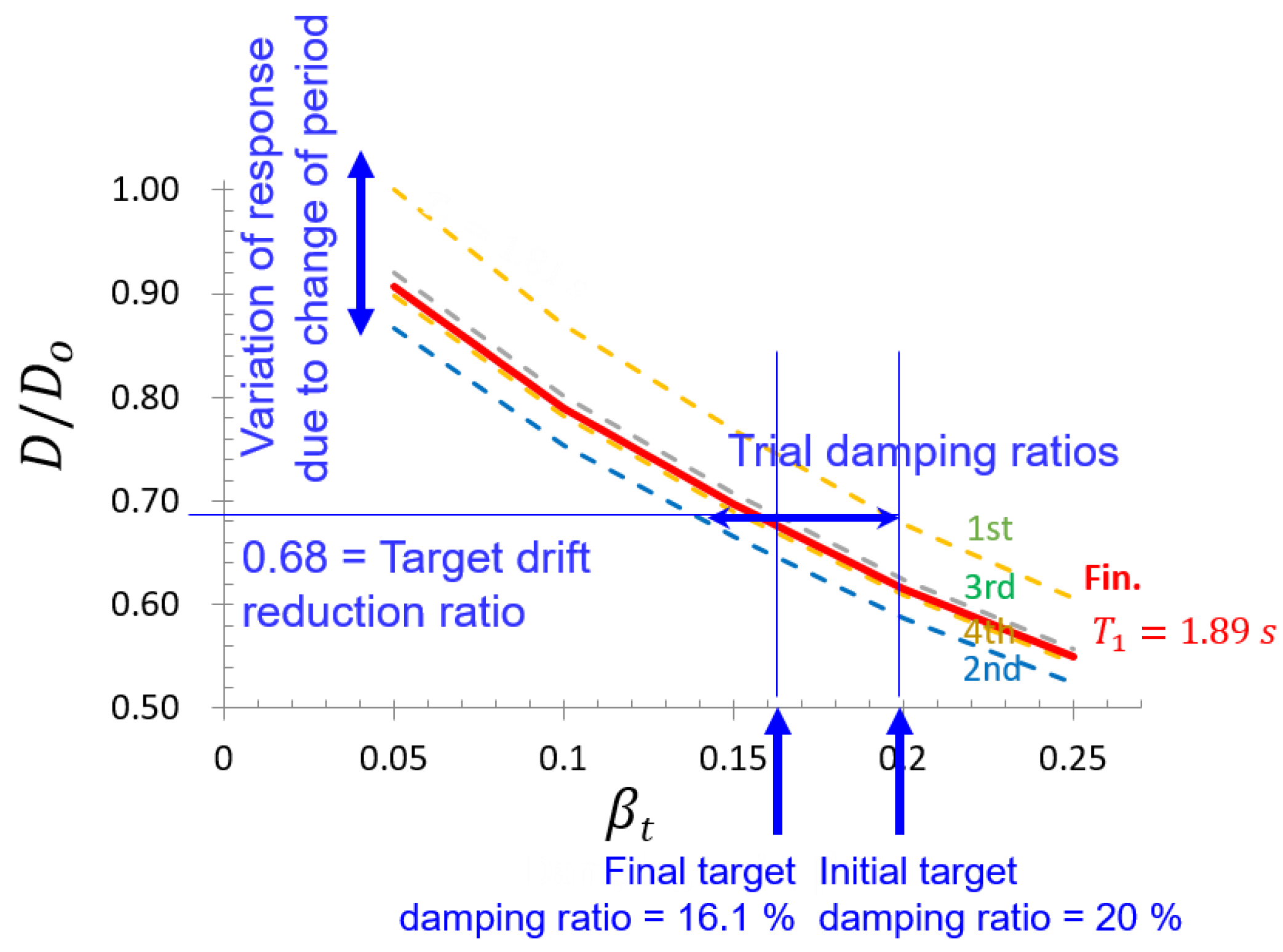
| Structure without Damping Devices | Iteration | Target Damping Ratio | Added Damping Ratio | Target Frequency (rad/sec) | Target Period (sec) | |
|---|---|---|---|---|---|---|
| Fundamental Period (sec) | Fundamental Frequency (rad/sec) | |||||
| 2.09 | 3.00 | - | 0.050 | 0.000 | 3.00 | 2.09 |
| 1st | 0.200 | 0.150 | 3.47 | 1.81 | ||
| 2nd | 0.142 | 0.092 | 3.26 | 1.93 | ||
| 3rd | 0.166 | 0.116 | 3.34 | 1.88 | ||
| 4th | 0.156 | 0.106 | 3.31 | 1.90 | ||
| Fin | 0.161 | 0.111 | 3.33 | 1.89 | ||
| Seismic Design Model | Story | Story Drift (%) | Member Section (DCR) | Weight (kN) | |
|---|---|---|---|---|---|
| Beam | Column or Brace | ||||
| 6F-SMRF-VED (with damping systems) | 6 | 0.51 | H-354 × 176 × 8/13 (0.75) | Column: H-414 × 405 × 18/28 (0.19) Brace: H-244 × 252 × 11/11 (0.43) | 297 |
| 5 | 0.68 | ||||
| 4 | 0.83 | H-450 × 200 × 9/14 (0.79) | |||
| 3 | 0.90 | Column: H-414 × 405 × 18/28 (0.32) Brace: H-244 × 252 × 11/11 (0.46) | |||
| 2 | 0.85 | H-496 × 199 × 9/14 (0.78) | |||
| 1 | 0.51 | ||||
| 6F-SMRF-SD (without damping systems) | 6 | 0.62 | H-506 × 201 × 11/19 (0.36) | Column: H-498 × 432 × 45/70 (0.07) | 590 |
| 5 | 0.77 | ||||
| 4 | 0.90 | H-606 × 201 × 12/20 (0.47) | |||
| 3 | 0.97 | Column: H-498 × 432 × 45/70 (0.15) | |||
| 2 | 0.88 | H-606 × 201 × 12/20 (0.45) | |||
| 1 | 0.48 | ||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
JEON, S.-H.; PARK, J.-H.; HA, T.-W. Seismic Design of Steel Moment-Resisting Frames with Damping Systems in Accordance with KBC 2016. Appl. Sci. 2019, 9, 2317. https://doi.org/10.3390/app9112317
JEON S-H, PARK J-H, HA T-W. Seismic Design of Steel Moment-Resisting Frames with Damping Systems in Accordance with KBC 2016. Applied Sciences. 2019; 9(11):2317. https://doi.org/10.3390/app9112317
Chicago/Turabian StyleJEON, Seong-Ha, Ji-Hun PARK, and Tae-Woong HA. 2019. "Seismic Design of Steel Moment-Resisting Frames with Damping Systems in Accordance with KBC 2016" Applied Sciences 9, no. 11: 2317. https://doi.org/10.3390/app9112317
APA StyleJEON, S.-H., PARK, J.-H., & HA, T.-W. (2019). Seismic Design of Steel Moment-Resisting Frames with Damping Systems in Accordance with KBC 2016. Applied Sciences, 9(11), 2317. https://doi.org/10.3390/app9112317