1. Introduction
With the increasing penetration rate of distributed energy resources (DERs) in the power grid and the increase of controllable load (CL), microgrids, which typically have a form of a small-scale power distribution system that integrates DERs, energy storage devices, loads, converters, communication devices, control and automation systems [
1], have become a research hotspot as a link between the distribution network and DER [
2,
3,
4]. Some microgrids further include combined cooling heating and power (CCHP). Grid-connected control, island detection, and island stable operation analysis are three key aspects of a microgrid access distribution network. A previous study [
5] briefly introduced the American Consortium for Electric Reliability Technology Solution (CERTS) American Electric Power (AEP) microgrid, General Electric Company (GE) microgrid, Japan’s Aichi, Kyoto, and Sendai microgrids, Taiwan’s Hsinchu microgrid, Spain’s Labein microgrid, the Dutch holiday park microgrid, and the microgrid project of the German MVV (Munich Transport and Tariff Association). DER with a capacity less than 300 KW can be connected to the low voltage 380 V power grid, while DER with a capacity higher than 300 KW must be connected to the medium voltage distribution network. The traditional distribution network can only passively limit the access point and capacity of DERs, at a cost of degraded system stability and deteriorated power quality [
1,
6]. Since it is difficult to solve the above problems using the technical methods of monitoring, control, and scheduling of the traditional distribution network, the concept of the active distribution network (ADN) has emerged [
7].
The active distribution network, as part of the smart grid, should have functions such as controlling distributed energy, voltage management, controllable load management, demand side management, and protection and fault location of the distribution network [
8,
9]. However, the distribution network Supervisory Control And Data Acquisition (SCADA) has limitations, such as a low sampling density, unsynchronized data, and no measurement of phase angle. It cannot complete tasks that require a high data time accuracy, low time delay, or the analysis of phase angle data in the active distribution network, such as DER protection and control, feeder automation, and fault location, etc. WAMS based on synchronous phasor measurement technology is widely used in current transmission networks [
10,
11]. WAMS commonly includes phasor measurement unit (PMU), phasor data concentrator (PDC), analysis and application center (AAC), and high-speed communication networks and other components. The PMU is able to perform high-precision acquisition of the real-time operational signals of the power grid (in microseconds) based on the GPS synchronous clock. Synchronized phasors are calculated, which are based on Coordinated Universal Time (CUT) or World Standard Time (UTC). Thus, power signals from different locations can also be compared and analyzed at the same time coordinate system. The output frequency of the PMU is generally between 25–100 HZ (50 Hz grid) or 30–120 Hz (60 Hz grid); in other words, the voltage and current phasors are transmitted every other fundamental wave, every fundamental wave, or half of a fundamental wave. The PMU data is either directly sent to the main station, or collected by the PDC then forwarded to the main station via the communication network. By analyzing the synchronized phasor data measured by the PMU, the main station is able to perform state estimation of the grid, wide-area monitoring protection and control, as well as stability analysis. The PMU in the transmission network WAMS has the advantages of a high sampling rate, high time precision, high-frequency output synchronous phasor data, etc., which can compensate for the shortcomings of the traditional distribution network SCADA in respective aspects. For example, by placing a PMU device at the grid connection of the microgrid and monitoring both sides of the grid connection point, the problems of grid connection control and island detection can be solved more easily. Additionally, with the development of WAMS technology, the PMU is able to achieve a higher reliability, compact size, and lower cost. It is, thus, promising for PMU to be widely adopted in the distribution network in the future. Therefore, an increased number of scholars have begun to study the application of PMU to the distribution network.
Previous studies [
12,
13,
14] have discussed the tasks that the PMU in the distribution network can accomplish, including stability analysis and monitoring of the distribution network, protection under the condition of DER introducing bidirectional power flow and phase angle deviation, distribution network status estimation, voltage control, fault location and detection, load rapid prediction, load modeling, harmonic estimation, parameter estimation, closed-loop operation of feeders, etc. Other studies [
15,
16] have analyzed the application of PMU in the industrial distribution network, including PMU optimal layout, PDC data collection, and PMU status monitoring of industrial parks. In addition to discussing the tasks of the PMU in the distribution network, for the main network and the distribution network PMU, they all have problems, such as massive data transmission, communication delay control, and network security in the communication process. A previous study [
17] proposed a WAMS communication resource allocation method based on optimal dynamic time division multiple access (TDMA) resource allocation. Another study [
18] proposed a real-time data compression and adapted protocol technology for WAMS, where the compression algorithm exception swing door compression (ESDC) is generated by the combination of exception compression (EC) and the swing door trending (SDT) algorithm. Adaptive protocol technology refers to the transmission of compressed data by improving the format of data frames defined by Institute of Electrical and Electronics Engineers (IEEE) C37.118.2. Another study [
19] proposed a method for combating traffic analysis attacks in WAMS. In this study, based on the priority of PDC receiving data packets, the data packets are processed and transmitted to ensure the timely transmission of data.
Among the above references, one study [
18] improved the data frame structure to compress transmission, reducing traffic, but did not add new frame types to transmit more kinds of information, which caused additional delay. The priority of the packets discussed in another study [
19] were based on the remaining time of the packet, without considering the different data inside the packet, and the need for latency may also be different. In order to meet the application requirements of the active distribution network and solve the problems that the existing transmission grid synchronous phasor transmission protocol will encounter in the distribution network, such as an insufficient frame type and different data delay requirements, this paper proposes a priority-based protocol extension method. This method increases the type of frame, determines the priority of the data, and increases the file type, thereby distinguishing the data required for various applications with different delay requirements. The method can also reduce network traffic and storage, and ensure that phasor data is transmitted preferentially.
The organization of this work is as follows.
Section 2 compares the distribution network SCADA and the transmission network WAMS, and explains the applicable scenarios, functions, and performance requirements of the micro multifunction phasor measurement unit (μMPMU).
Section 3 compares National Standard of the People’s Republic of China/Recommended (GB/T) 26865.2-2011 and International Electro technical Commission (IEC) 60870-5-101/104 statutes, summarizing their content to meet the needs of active distribution network communication.
Section 4 proposes a protocol extension method based on data prioritization.
Section 5 implements and verifies the proposed method, and
Section 6 summarizes the article.
3. Protocols Analysis
It can be seen from the contents of
Table 2 that SCADA and WAMS adopt different protocols. The following sections analyze protocols and find their parts that meet the application needs, thus providing a basis for the expansion of the statute.
3.1. Protocols Introduction
IEC 60870-5-101/104 [
28,
29]: The International Electrotechnical Commission has developed IEC 60870-5-101 based on Enhanced performance architecture (EPA) from the IEC 60870-5 series communication standard, and network communication version 104 is proposed on the basis of 101.
GB/T26865.2-2011 [
30]: 2011 version of real-time dynamic monitoring systems of power system-Part 2: Protocols for data transferring. This specifies the data transmission protocol of the real-time dynamic monitoring system of the power system, including real-time data transmission and offline data transmission. Suitable for real-time data transmission and historical file transfer between the main station and sub-station. A previous study [
31] introduced the development of the version of the Synchronous Phasor Transmission Protocol, and another compared GB/T 26865.2-2011 with IEEE C37.118.2-2011 [
32]. Their definitions in real-time data transmission are basically the same. The analysis and extension of GB/T 26865.2-2011 can be easily used by IEEE C37.118.2-2011.
3.2. Protocols Comparison
Table 3 compares the two standards from the main application scenarios, functions, communication methods, communication modes, frame types, timing modes, and frame rates.
From the comparison in
Table 3, it can be found that the functions described in IEC 60870-5-101/104 are more abundant than GB/T 26865.2-2011, and are more suitable for practical applications in the distribution network. The communication modes of IEC 60870-5-101/104 are Polling and Cycle Distance Transmission (CDT), but in practice polling communication mode is used more often, and adopts the method of actively sending changed data. The advantages of this are that the reliability of each round of transmission service is ensured and the amount of information transmitted is reduced, but the system response time increases. According to the description of GB/T 26865.2-2011, the primary station controls the sub-station by issuing a command frame. The sub-station performs transmission configuration according to the CFG-2 delivered by the primary station, so that the data upload function can be automatically completed, but the remote control is not provided. In communication mode, the command pipeline and file pipeline adopt polling, and the data pipeline adopts CDT.
In the communication method, IEC 60870-5-101 uses serial communication, and IEC 60870-5-104 and GB/T 26865.2-2011 use network communication based on transmission control protocol/internet protocol (TCP/IP). For the international protocol IEEE C37.118.2-2011 similar to GB/T 26865.2-2011, it can adopt the same serial communication method as IEC 60870-5-101, and can also choose IP-based network communication, including TCP, user datagram protocol (UDP), and a combination of TCP and UDP. Therefore, in the choice of the communication method of the extended protocol, it is not necessarily limited to the use of TCP, and the communication method based on TCP/UDP can be flexibly combined, so that the advantages of TCP and UDP can be fully utilized.
It can be seen from the frame rate and the timing mode that GB/T 26865.2-2011 has higher requirements in terms of the time precision and communication rate. The advantage of this is that the data has a high real-time performance and precision, and the disadvantage is the waste of communication resources. Combining the frame type for analysis, taking the data frame as an example, the frame structure is fixed, and the data type of each data frame is the same, including phasor data, analog quantity, and digital quantity. From the perspective of data change frequency, many analog quantities are based on DC sampling, and the sampling rate is low and the change is slow. Generally, they change once in one second or several seconds, and digital quantities change more slowly. If such analog and digital quantities are transmitted at a high speed, like the transmission speed of phasor data, there will be a large amount of data duplication and redundancy, wasting communication bandwidth resources. From the perspective of application, whether all the information is needed in different application scenarios needs to be considered. For example, the master station needs all data to improve the accuracy of SCADA data [
22,
33]. However, for the hierarchical-distributed protection and control of the active distribution network, control units of each area or layer only need to acquire the synchronized phasor data to start the corresponding protection, and do not need to obtain all the information [
8,
34]. Excessive data can also cause problems, such as communication blocking and an increased data processing time.
In terms of offline files, GB/T 26865.2-2011 only contains dynamic data files and transient recording files. In actual applications, continuous recording files will be added. IEC 60870-5-101/104 contains a wide variety of documents to meet the data recording needs of various distribution terminals.
Based on the above analysis, GB/T 26865.2-2011 lacks definitions of remote control, files, data types, etc., required for power distribution terminals. Part of the data has a high redundancy, and frame types are fixed. The frame type, communication flow, and file type should be increased, so that the μMPMU can perform data classification and transmission, add more power distribution terminal functions, increase file storage types, and reduce communication traffic and storage usage.
4. Priority-Based Protocol Extension Method
This section will detail the protocol expansion method. The goals of this method are to ensure the prioritized transmission of important data, expand the μMPMU remote control function, increase the types of offline files, and reduce the amount of network communication and data storage.
4.1. Frame Type Extension
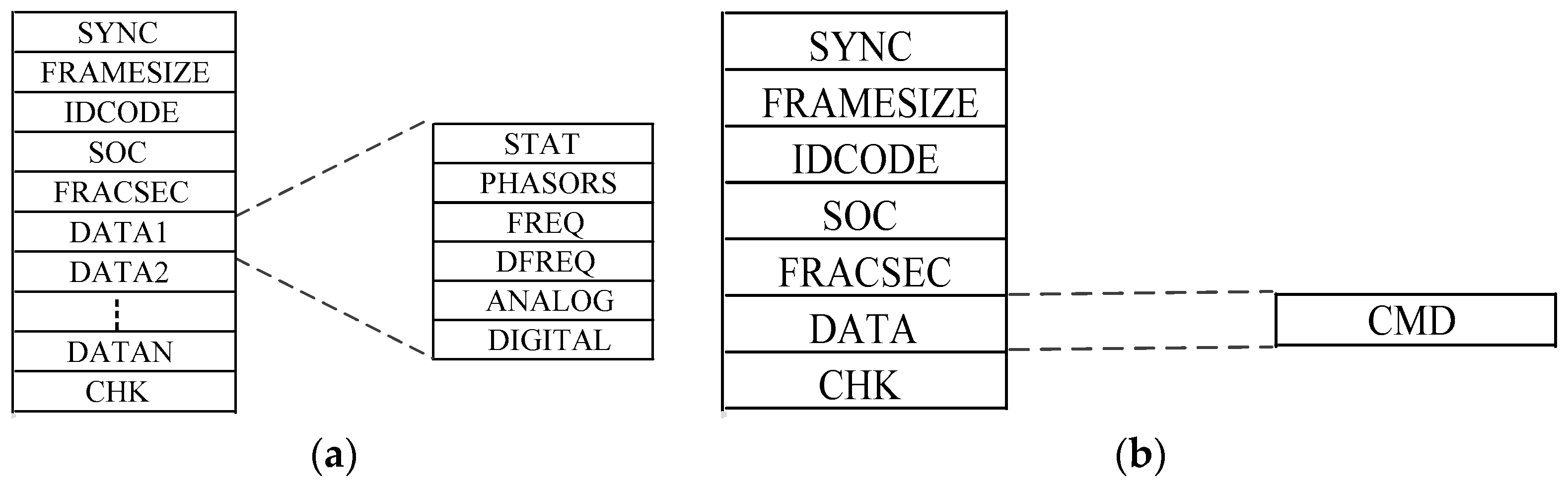
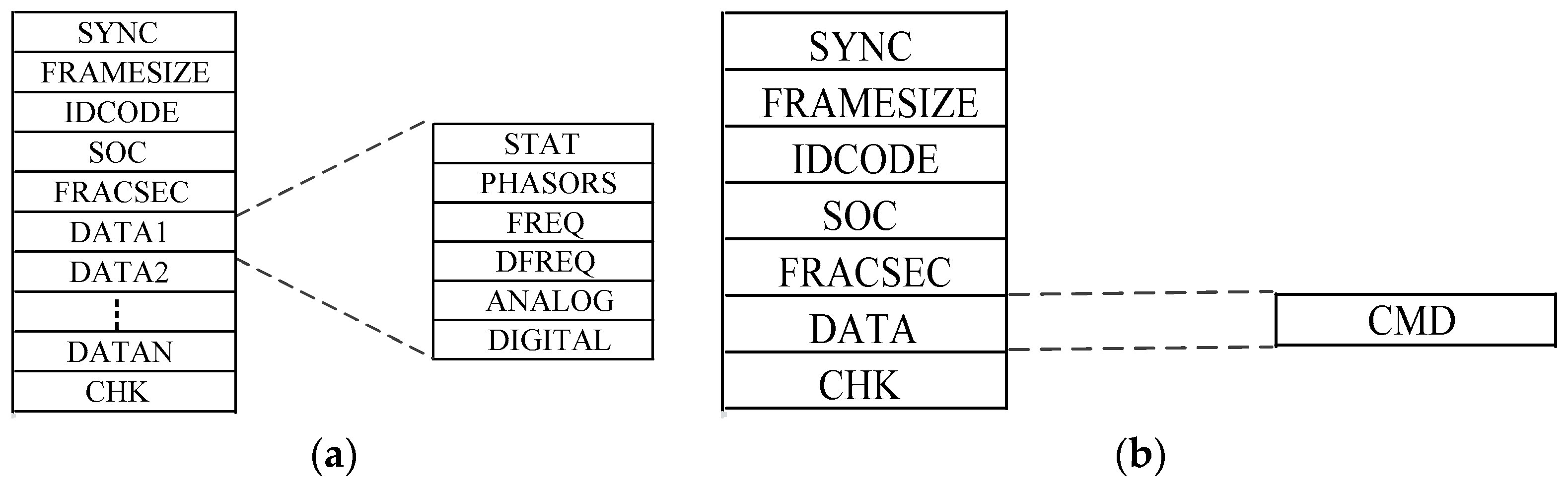
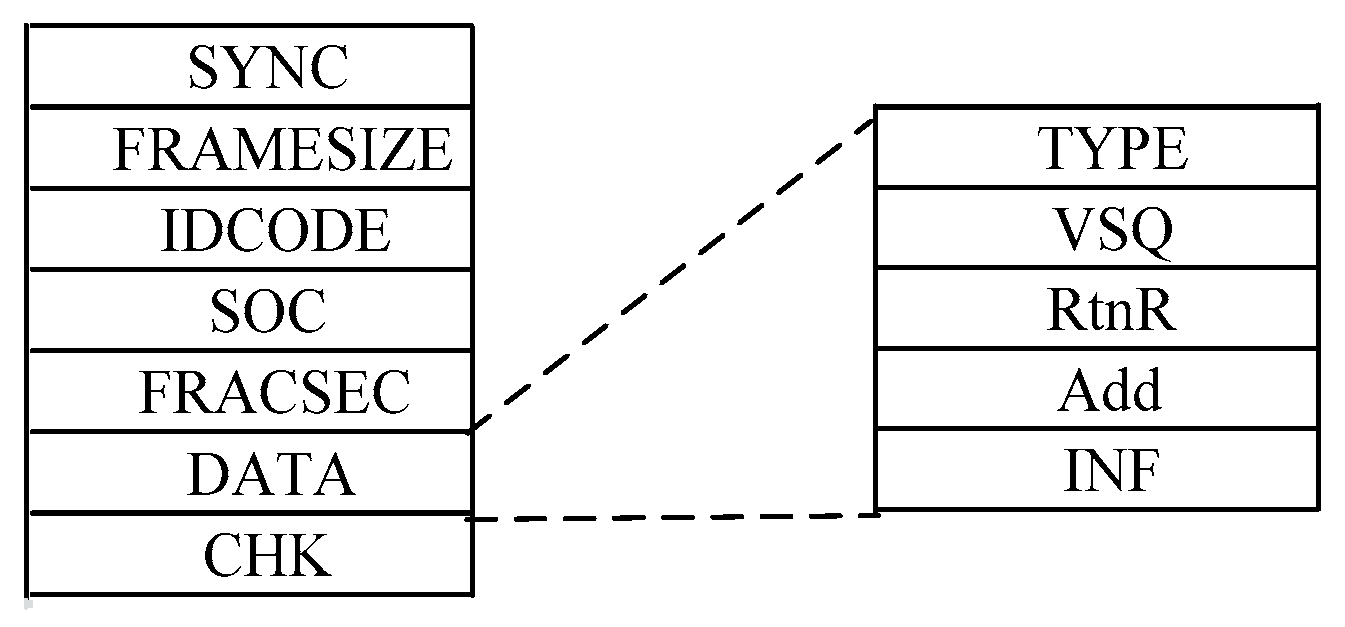
The data frame structure and the command frame structure of GB/T 26865.2-2011 are shown in
Figure 3. The data frame sent by the PMU contains only one data section DATA, which stores its own measured data, and the data frame sent by the PDC contains the number of DATA segments equal to the number of PMUs connected to it. The DATA segment contains bit-mapped flags STAT, phasor estimates PHASORS, frequency offset FREQ, frequency change rate DFREQ, ANALOG, and DIGITAL. It does not state whether there is a change in digital quantities or whether the analog quantity requires time synchronization. All data are sent together. The command frame is sent by the main station, PDC, and PMU. It only contains one DATA segment and stores the command word CMD. CMD is 2 bytes in length, where Bits 12~4 are reserved. It refers to DLT 1402-2015 “Technical specification for application of synchronous phasor in power plant and substation” to supplement the reserved 9 bits; define Bits 05~04 as 01 points and 10 points; define Bits 07~06 as 01 selection, 10 Execute, and 11 cancel; and define the last remaining Bits 12~08 as the information object address. The 5-bit binary number represents up to 31 digital quantities. For a single μMPMU, 31 digital quantities are sufficient, but one distribution network PDC can connect up to more than 20 μMPMUs. In remote control, the PDC should match each remote control number of each μMPMU to the corresponding unique remote control number of the main station, and 31 is far from meeting the mapping requirements, so this extension is not applicable on the μMPMU.
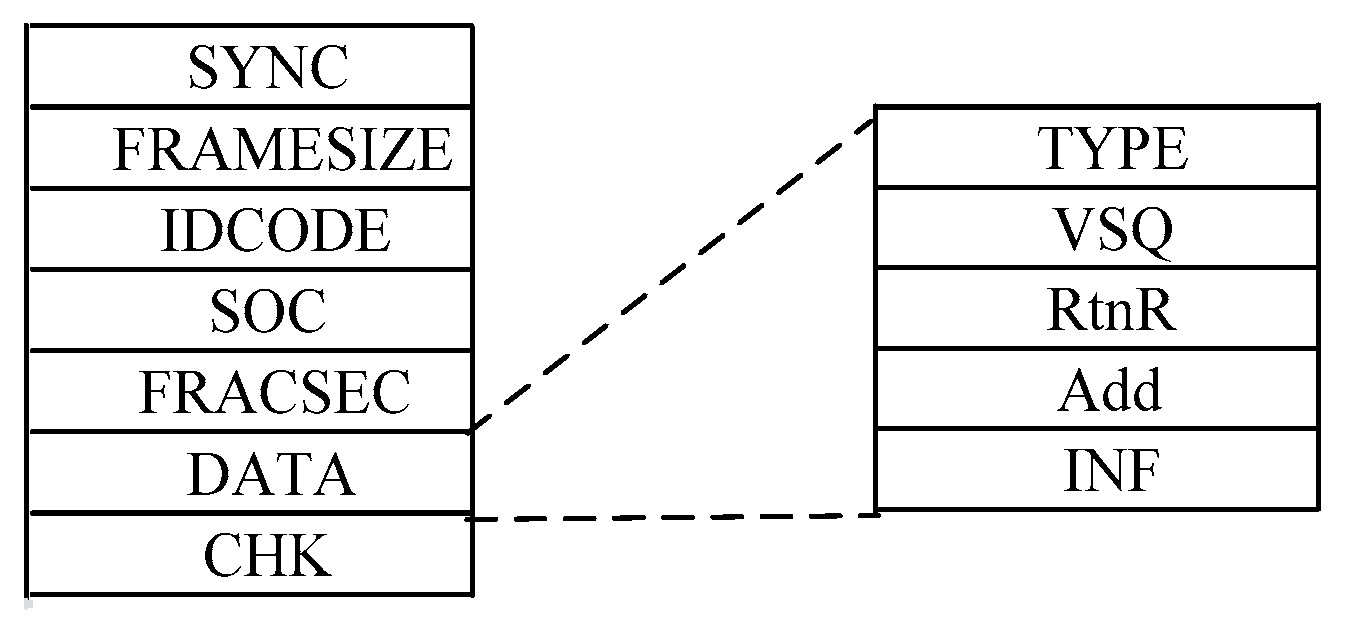
The newly added frame type is named the application extension frame, and the frame structure is shown in
Figure 4. The application extension frame is transmitted through the command pipeline; the frame synchronization word SYNC value is 0xAA53; and the DATA segment content includes the type identifier TYPE, the variable structure qualifier VSQ, transmission reason RTNR, the public address (PMU address), and the information object address INF. TYPE defines the structure, type, and format of INF. VSQ defines the number of information objects contained in the INF, as well as the addressing method. INF contains the information object address, the information element, and the CP56Time2a time stamp. After the application extension frame is used, the μMPMU can choose to transmit different types of data through the data frame or application extension frame, and also solve the mapping problem between the μMPMU remote control number and the remote control number of the main station, and the remote control function can be added to the μMPMU.
4.2. Types of Files
IEC 60870-5-101/104 is combined with the types of files included in GB/T 26865.2-2011, see
Table 4. Then, the file type is selected according to the actual application scenario.
4.3. Data Priority Delineation
After the frame type is extended, different data can be transmitted through different kinds of frames and pipes, and the priority of the data is determined according to the timeliness of the data. The priority of different data is shown in
Table 5. The output delay in the table represents the time difference between the data time stamp and the data output time.
The priority 1 (P1) data includes PHASORS, FREQ, DFREQ, and analog quantities requiring time synchronization. Based on the national grid enterprise standard Q/GDW 11202.6-2014 ‘‘The test specifications for automation equipment in smart substation Part 6: Phasor measurement unit”, the output delay should be within 50 ms. The priority 2 (P2) data includes the remote control command. As can be seen from
Table 1, the one-way communication delay of vertical network protection as the protection application is less than 100 ms, and the one-way communication delay of advanced distribution automation as the control application is less than 500 ms. The communication medium for protection and control applications should use Ethernet Passive Optical Network (EPON) (delay value 1.5 ms) or an industrial Ethernet (delay value 10 ms) with a low network delay, and the output delay should be within 90 ms. However, if there is only a control application and the communication mode is a wireless private network (delay value 30~300 ms), the output delay should be within 200 ms, and the table is set to 90 ms. The priority 3 (P3) data includes telemetry and telesignalization summoned by the main station, changed data, and Sequence Of Event (SOE). Generally, when the voltage changes by 1%, the current changes by 1% or 5%, it will be actively sent, and the output delay is within 200 ms. The priority 4 (P4) data includes periodic upload digital quantities and analog quantities that do not require time synchronization, the frame rate is 0.1~1 frames/s, and the output delay is within 400 ms. The priority 5 (P5) data includes various historical data files, configuration files, and header files, and the output delay is within 800 ms. Application extension frame-2, frame-3, frame-4, and frame-5 simply indicates that the application extension frame carries different data, and their frame structure is not different. In fact, the data priority and output delay should also be set according to the actual application. The level of data priority can be increased or decreased, and the output delay can also be adjusted. Table data are used as reference values. In order to guarantee the data output delay is within the specified milliseconds, this paper uses the timer and the priority queue method to ensure the data will be sent out before the set time expires, so that the data output does not time out.
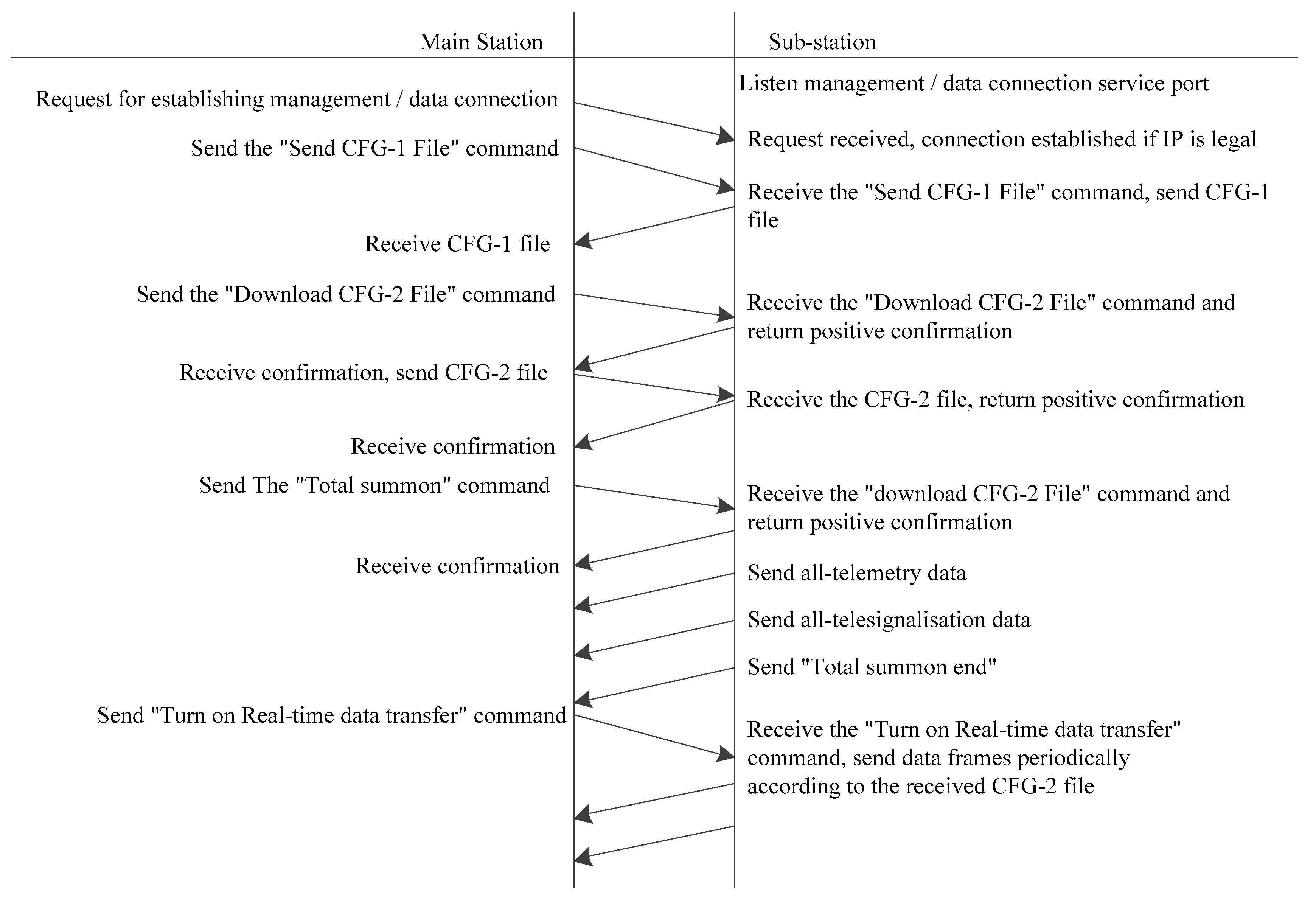
4.4. Communication Flow Extension
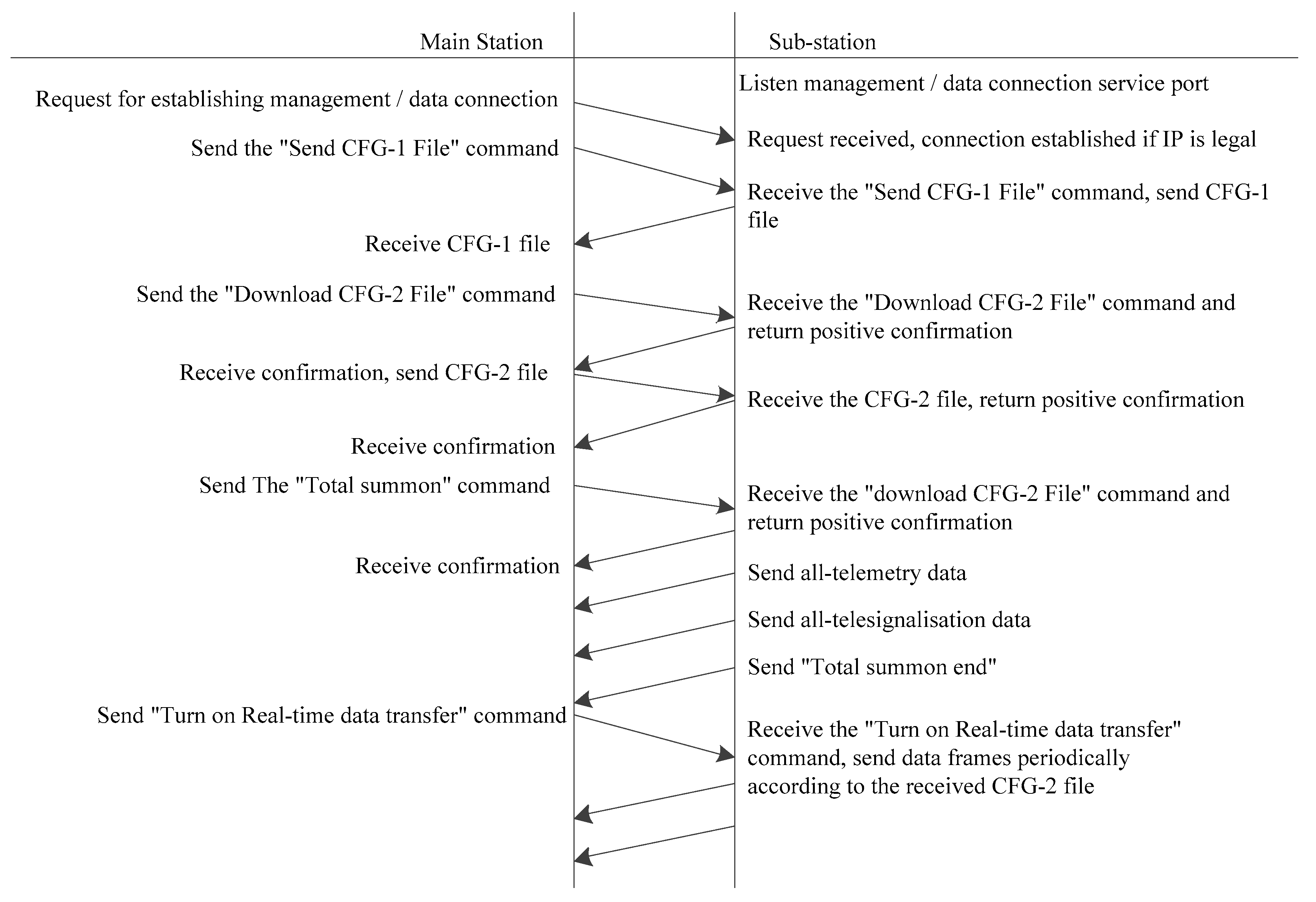
After the application extension frame is added, the startup process of the communication between the sub-station and the primary station needs to increase the total summoning session. All telesignalization and telemetry data of the sub-station are uploaded by the total summoning, and the real-time data transmission is started after the total summoning is completed, and the startup process ends. The communication startup process is shown in
Figure 5. It should be noted that the main station and PDC/μMPMU, PDC, and μMPMU can all form the relationship between the main station and sub-station.
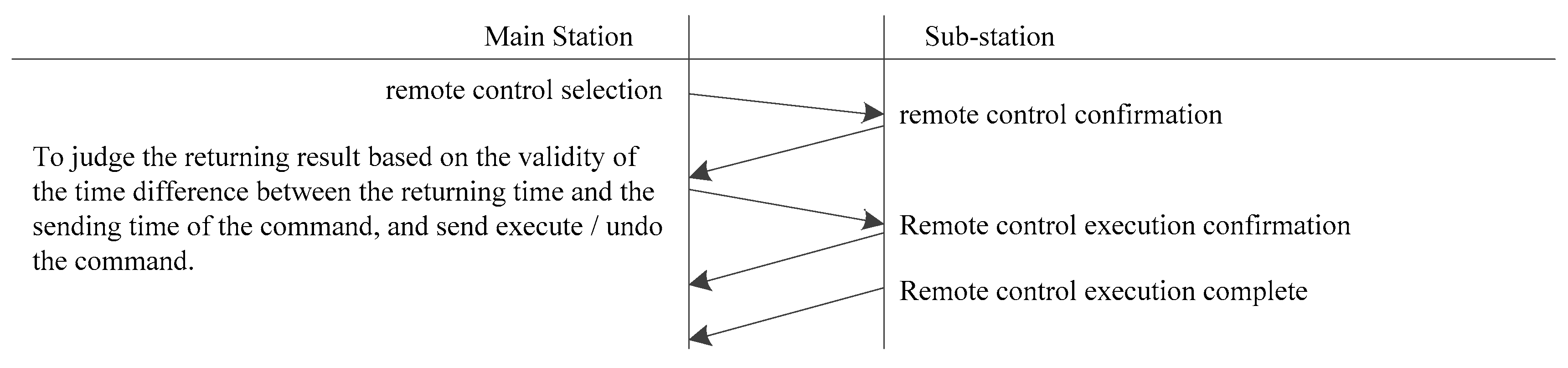
After the startup process is over, if the main station needs to remotely control the sub-station, it needs to follow a certain sequence of steps. The remote control process includes remote control selection, remote control confirmation, and remote control execution. The main process is shown in
Figure 6.
In addition to the aforementioned total summoning and remote control process, after the startup process, sub-station transmission-changed data includes digital quantities and analog quantities that do not require time synchronization. At the same time, the communication mechanisms, such as packet summons and periodic transmission, can be added. The main station can communicate directly with μMPMU, and the main station also communicates with μMPMU through PDC. The above communication process is actually an interaction process of the three. When the method is implemented, attention needs to be paid to the mapping of each device. The PDC as the intermediate between the main station and μMPMU should save the upper and lower point tables. After receiving the remote data of μMPMU, the data point number is mapped to the point number saved by the main station, and the remote data is then uploaded. After receiving the remote command of the main station, the remote control point number is mapped to the μMPMU point number, and the remote control command is then sent.
4.5. Data Flow Calculation Method
Without the method of this paper, the data frame length calculation equation is as follows:
In Equation (4), Ldata is the total length of the data frame, and F1 is the base length of the data frame and its value is the total bytes of the SYNC, FRAMESIZE, IDCODE, SOC, FRACSEC, and CHK fields in the data frame. P is the length of real-time data, whose value is the total bytes of STAT, PHASORS, FREQ, and DFREQ fields in the data frame. A is the length of analog quantity and its value is the length of the ANALOG field in the data frame, and D is the length of digital quantity, whose value is the length of the DIGITAL field in the data frame.
In order to ensure the uniform transmission of data, the method of sending each data frame separately to avoid frames is adopted. Considering that the maximum segment length
LMSS of TCP without options is 1460 bytes, when
Ldata exceeds
LMSS, the data frame requires multi-TCP frame transmission. The calculation equations of the amount of data transmitted per unit time are as follows:
In Equations (5) and (6), n and Lx are the quotient and remainder of Ldata, respectively, divided by LMSS; Mdata is the total amount of real-time data transmitted per unit time; Lnet is the network transmission base length, and its value is the length sum of the Ethernet frame preamble, Start of Frame Delimiter (SFD), Ethernet header, 4-byte Cyclic Redundancy Check (CRC), IP header (IPv4, without TCP option), and TCP header length; and Rdata is the data frame transmission rate, indicating the number of frames sent per unit time.
After adopting the method of this paper, if all the analog quantities and digital quantities are separated into the application extension frame transmission, the frame length calculation equation is separated into the following three equations:
In Equations (7)–(9), Lnew-D is the total length of the data frame after the method is used; LYC is the total length of the application extension frame for transmitting telemetry information; F2 is the base length of the extended frame of the application, and its value is the length sum of the F1, TYPE, VSQ, RtnR, and Add fields in the extended frame; AINF is the length of the INF field containing the full analog; DINF is the length of the INF field containing the full digital; and LYX is the total length of the application extension frame for transmitting telesignalization information.
The method in this paper also needs to ensure the uniform transmission of phasor data. The calculation equations of the average transmission amount of data per unit time are as follows:
The meanings of n1 and Lx1 in Equations (10)–(12) and the calculation are the same as for formula (5); Mnew is the total amount of real-time data transmitted per unit time after adopting the method; RYC is a fixed transmission rate for the application extension frame for transmitting telemetry information; and VYC is the frame rate average change value of the application extension frame for transmitting changed telemetry information. The value is affected by the ratio of the amount of changed analog quantities to the total analog quantities and the proportion of the change time to the full running time. RYX is a fixed transmission rate for the application extension frame for transmitting telesignalization information and VYC is the frame rate average change value of the application extension frame for transmitting changed telesignalization information. The value is affected by the ratio of the amount of changed digital quantities to the total digital quantities
It should be noted that the calculations of Mdata and Mnew do not take into account the traffic generated by the file transfer that the μMPMU and PDC may perform during the real-time data transmission process, as well as the traffic generated by the acknowledgment packets of TCP replies.
5. Experimental Verification
This section describes the μMPMU multi-priority data processing model, including how to generate and process all kinds of priority data. It then illustrates the test environment, which is made up of the PMU Emulator, real distribution network PDC, Main station Emulator, and some technical details of them. Finally, the feasibility and effectiveness of the extended method are verified by experimental data and computational data.
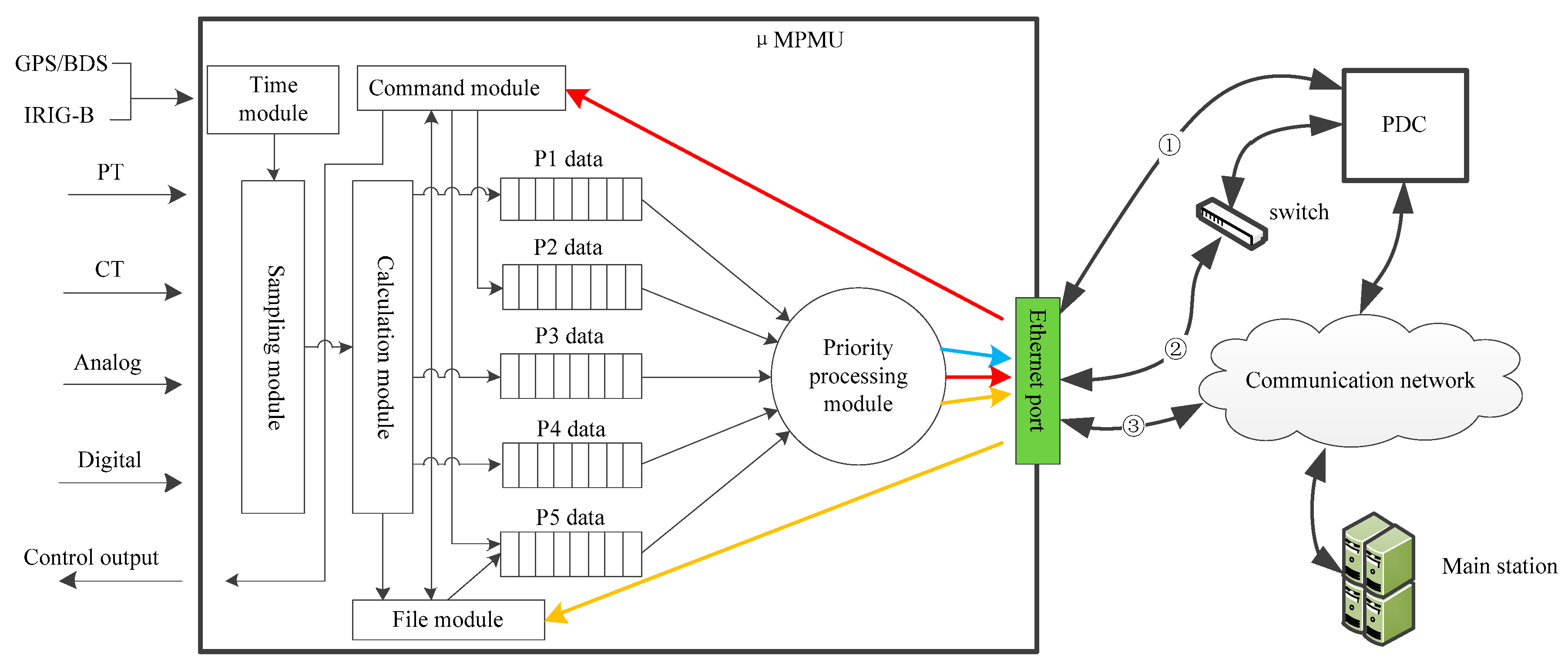
5.1. μMPMU Multi-Priority Data Processing Model
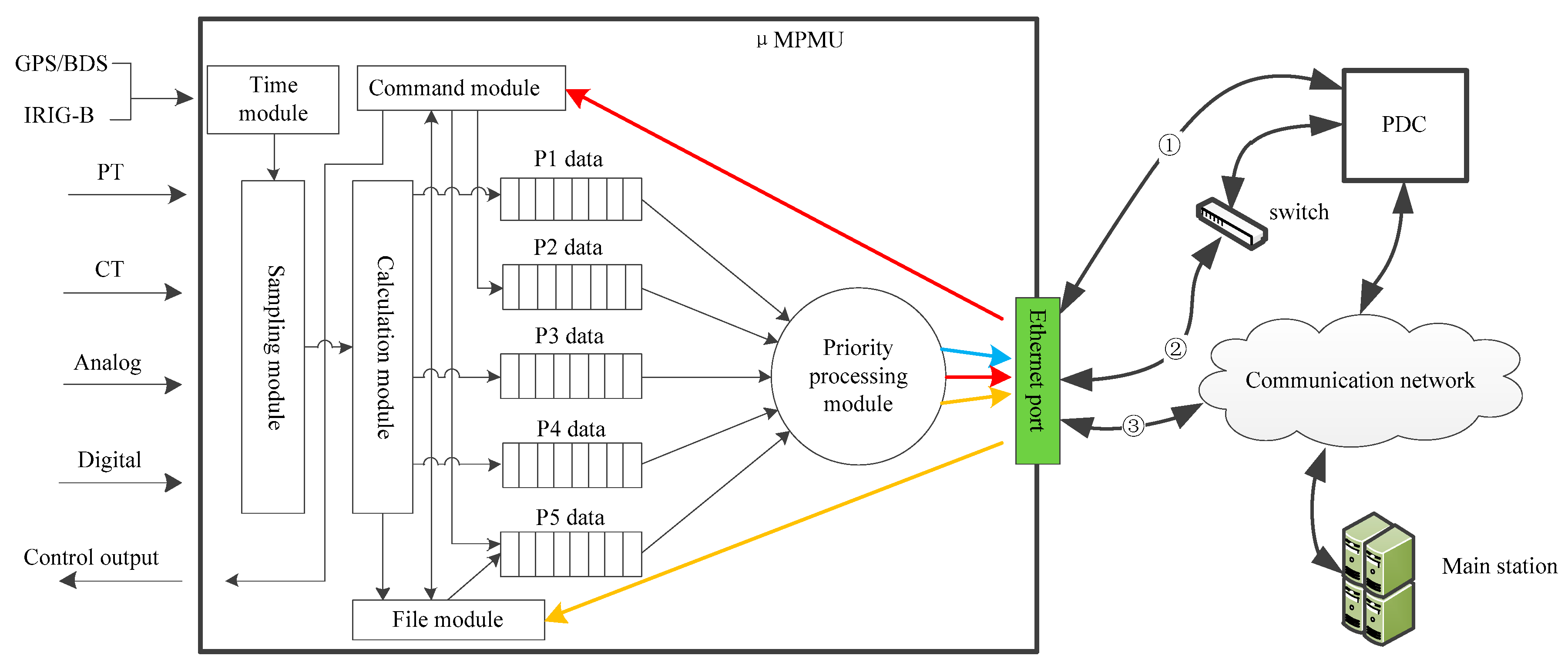
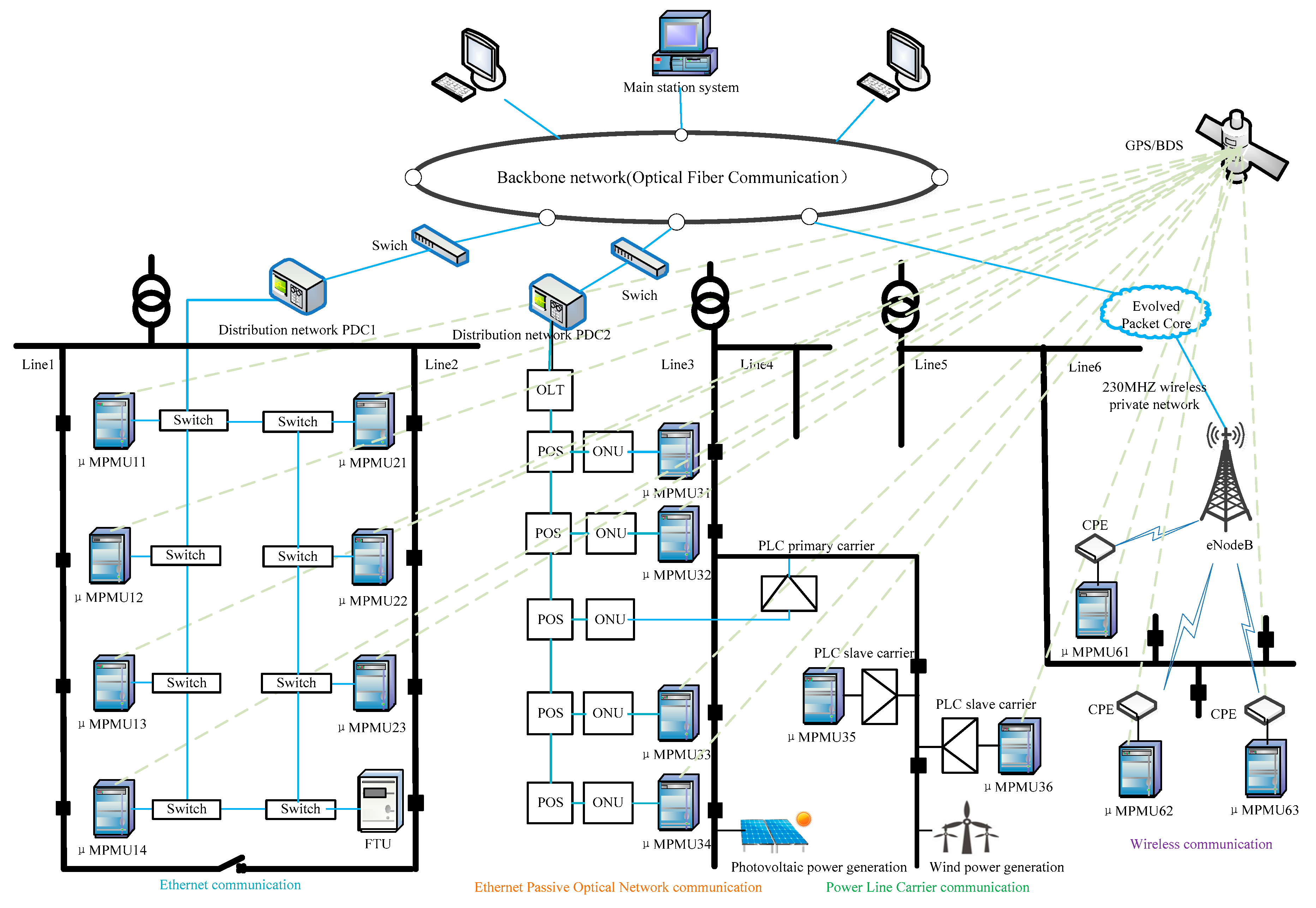
Figure 7 shows the μMPMU model with the multi-priority data processing model designed according to the proposed method. The real μMPMU internal modules and other communication networks and devices are abstracted, focusing only on the method implementation. The blue line is the data pipeline and is responsible for transmitting P1 data. The red line is the command pipeline, which is responsible for transmitting the downlink management and control commands, configuration files, and uplink P2, P3, P4, and partial P5 data. The orange line is the file pipeline, which is responsible for transmitting the downstream file command and the upstream part of the P5 data. Path ① indicates that the μMPMU and the PDC are directly connected through the network cable. Path ② indicates that the μMPMU is connected to the PDC through the switch. Path ③ indicates that the μMPMU communicates directly with the primary station over the communication network.
The μMPMU receives the GPS/BDS or InterRange Instrumentation Group Time Code Format B (IRIG-B) timing signal, and the Time module performs high-precision timing and punctual functions of the device. The Time module outputs high-precision sampling pulses to the Sampling module. The Potential Transformer (PT) and Current Transformer (CT) signals are filtered and passed to the Sampling module to form time-stamped sample data. After the calculation is done by the Calculation module, phasor data and recorded data are generated, and phasor data is transmitted as P1 data. The recorded data is divided into transient recording and continuous recording data, and is stored in the File module. When the main station/PDC summons the recording file through the file pipeline, it is transmitted as P5 data. The digital quantities and part of the analog quantities change slowly, so the sampling rate is also low. After calculation, they are uploaded as P4 data. When the sampling value exceeds the limit, there is SOE data, or if the main station actively calls, they are uploaded as P3 data. The command module processes the management and control commands and configuration files issued by the main station/PDC received through the command pipeline. The remote control response is transmitted as P2 data, and the configuration file and header file obtained from the File module are transmitted as P5 data. The command module is also responsible for the output of control signals. All data is sent to the priority processing module for processing. See
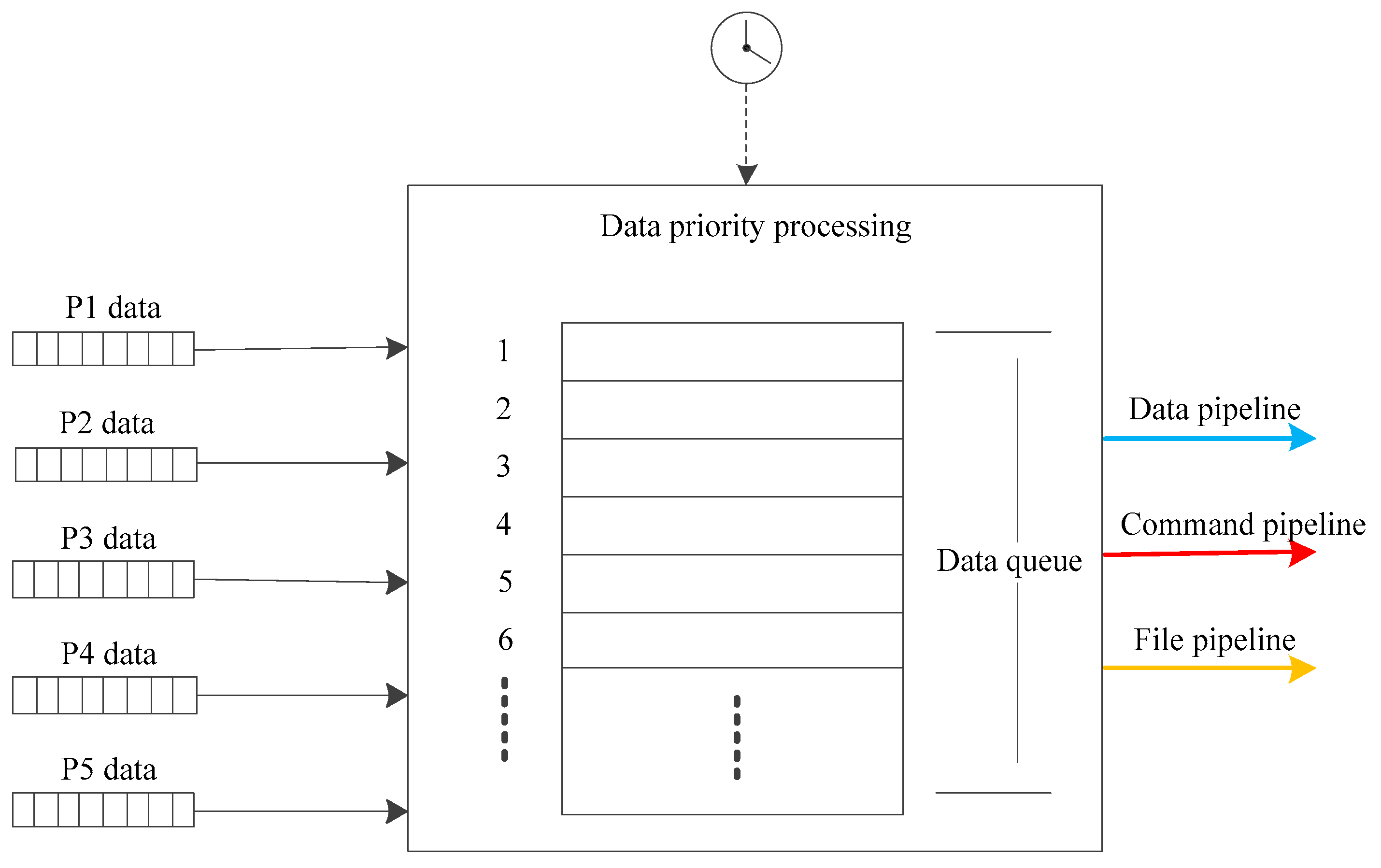
Figure 8 for processing logic.
The P1~P5 data has an output delay requirement, and the priority processing module distinguishes the level of the input data to determine the remaining time of each piece of data, and queries the remaining time of the data in the queue through a timer period. The data with the remaining time of 0 is sent. If there is no data with the remaining time of 0, the data with the smallest remaining time or the data with the remaining time less than the timer period is sent. If there are other data waiting to be sent, the remaining time of each data is reduced by one timer cycle time. The advantage of this method is that the high-priority data can be sent first when the multi-class data is generated at the same time and the low-priority data will also get the transmission opportunity after waiting for a certain amount of time, and each set of data will not miss its effective time.
5.2. Experimental Environment
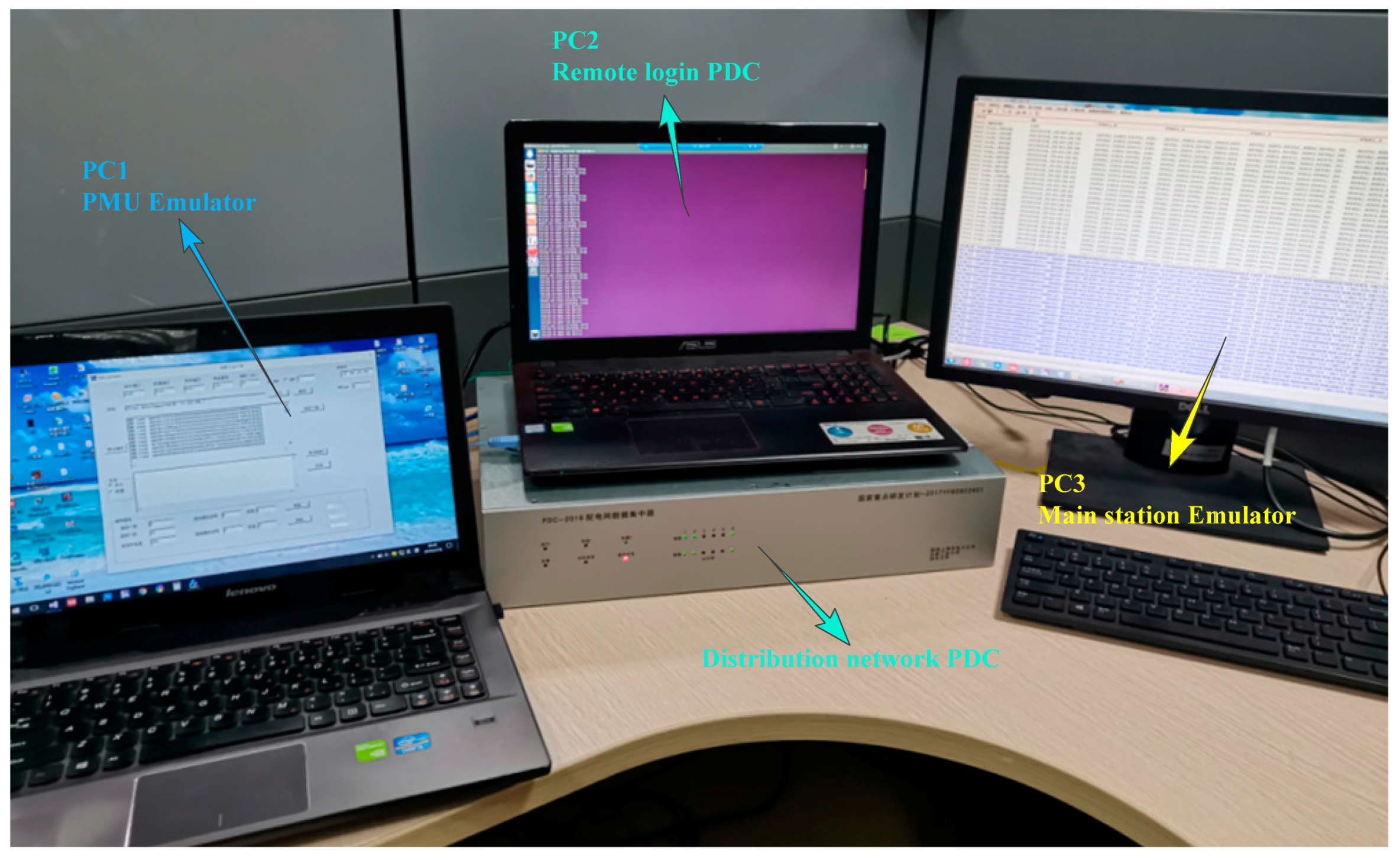
The experimental environment consists of the PMU Emulator, the distribution network PDC, and the Main station Emulator. The above software and hardware have been developed by the authors of this paper. This type of PDC has been piloted and operated in 220 KV and 35 KV substations in Pudong New Area, Shanghai, China.
PMU Emulator: PMU Emulator is developed on Visual C++ and supports the standard GB/T 26865.2-2011 protocol and the extension method, using Socket multi-channel and multi-thread programming. The software is based on the dialog framework, which can simulate PMUs within 30 units at the same time, and the number of phasors, the number of analog quantities, and the number of digital quantities of each PMU can be modified by the initial configuration file. It can support multiple communication rates, such as 200, 100, 50, 25, 10, 5, and 1 frames/s. Data transmission is based on multimedia timer scheduling, improving uniformity between data frames. Real-time data can vary according to time, or it may change randomly, and can also use dynamic data files from DIgSILENT simulation software output or on-the-spot. The data time of each PMU starts to be generated from the computer time, and the time stamps can be the same, or the time difference between them can be fixed (10~500 ms), to simulate the time difference between different PMU data passing through different channels to PDC. This is run on PC1 in
Figure 9. PC1 configuration: Intel (R) Core (TM) i5-3230M processor, 2.6 GHz, 8 G memory.
Distribution network PDC: PDC device hardware adopts platform hardware architecture design, a dual-core dual-thread CPU, Intel (R) Celeron (R) 2980 U, 2 M cache, clocked at 1.60 GHz; the hard disk adopts a Solid State Disk, with a capacity of 480 GB; the memory type is DDR3L, with a memory size of 4 GB; the time interface is RS-485, using IRIG-B timing; and it supports a dual power supply, which can be remotely logged in to through the network port or directly connected to the monitor. The system uses a Linux real-time multitasking operating system that is autonomously tailored. Software support standard GB/T 26865.2-2011 protocol and the extension method, using Socket multi-channel and multi-thread programming, through the select procedure, are employed to complete non-blocking mode communication. The data transfer rate is adjustable and the file is cyclically stored. It can connect no less than 20 μMPMUs, and is able to communicate with multiple primary stations, supporting high-latency PMU data aggregation and forwarding; that is, stable communication functions in a hybrid networking environment. The PC2 in
Figure 9 is used to remotely log in to the PDC.
Main station Emulator: Main station Emulator is also based on Visual C++ development, based on a single document view structure. It is multi-threaded and can be connected to multiple PMUs or PDCs. Each connection to a PMU or PDC will create a command pipeline, data pipeline, and file pipeline, occupying three sockets. If each socket creates a thread, three threads are created for each sub-station. At the same time, since the data channel transmission rate can reach more than 100 frames/s, for the PC, it is easy to have problems such as insufficient system memory resources. For this reason, a network communication non-blocking mechanism is adopted, and each PMU command, data, and file pipeline shares one thread. The CAsyncSocket class is used to determine which ports receive the data and then process them accordingly. The Main station Emulator uses tables to display received PDC messages, time, transmission rate, configuration information, binary values of data, the voltage and current values after the coefficient conversion, and so on. When testing PDC data aggregation and forwarding, the Main station Emulator can parse and display the PDC configuration information and the processed synchronized phasor data, which is helpful for analyzing the PDC function and performance test results. This is run on PC3 in
Figure 9. PC3 configuration: Intel (R) Core (TM) i7-4790M processor, 3.6 GHz, 8 G memory.
The IP of PC1 is 192.168.3.206. The IP of PC3 is 192.168.8.196. The PDC connects to the PC1 through the network port with the IP address of 192.168.3.207, and connects to the PC3 through the network port with the IP address of 192.168.8.207. The command pipeline port number is 9001, and the data pipeline port number is 9000. Network data is crawled by running Wireshark software on PC3 to help analyze communication processes, data, and traffic. Wireshark (formerly known as Ethereal) is a network packet analysis software. It is developed to provide the most detailed measurements of network packets and data. Wireshark uses Windows packet capture (WinPCAP) as an interface to send and receive data packets directly on the network card.
5.3. Experimental Results and Analysis
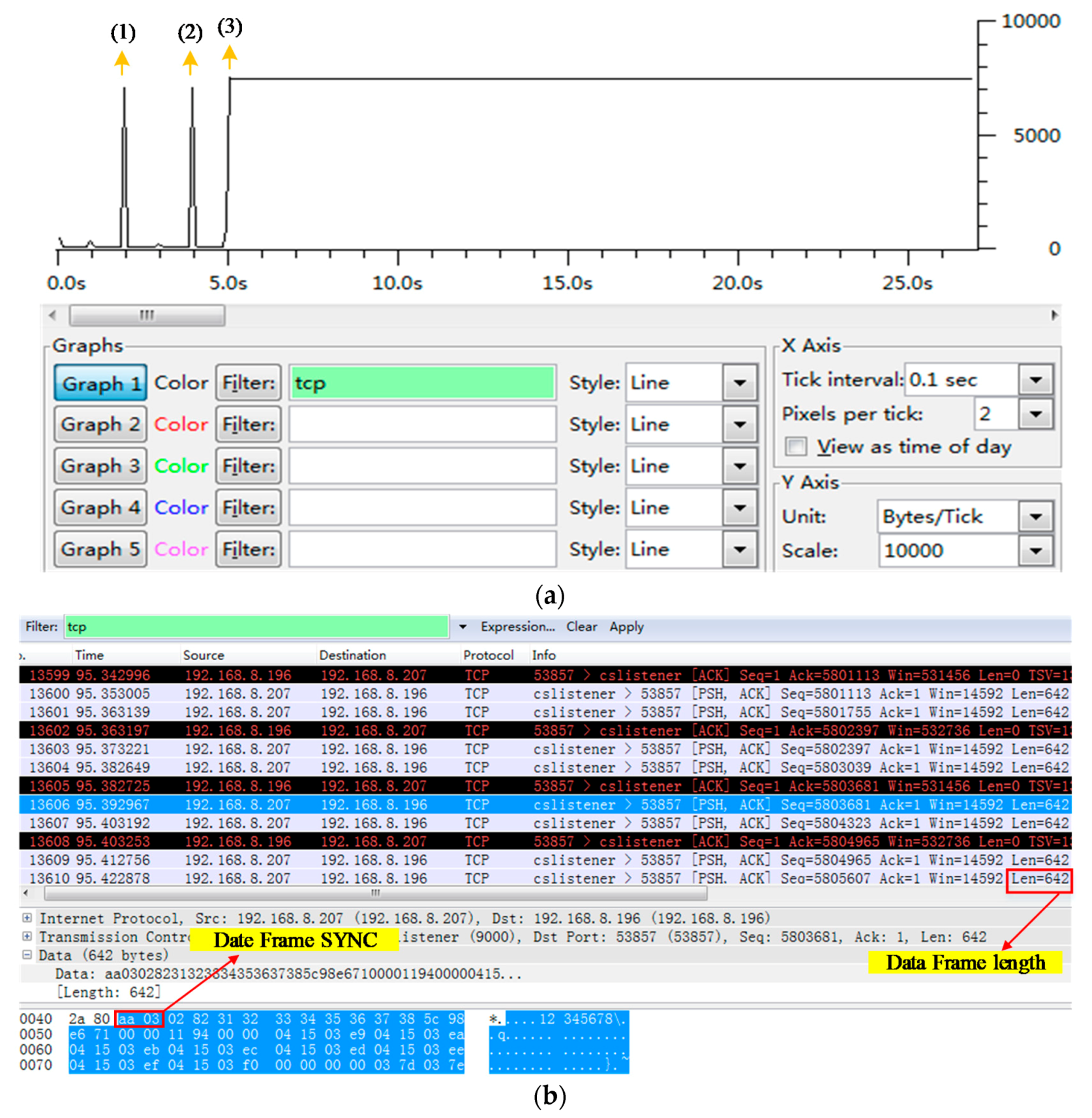
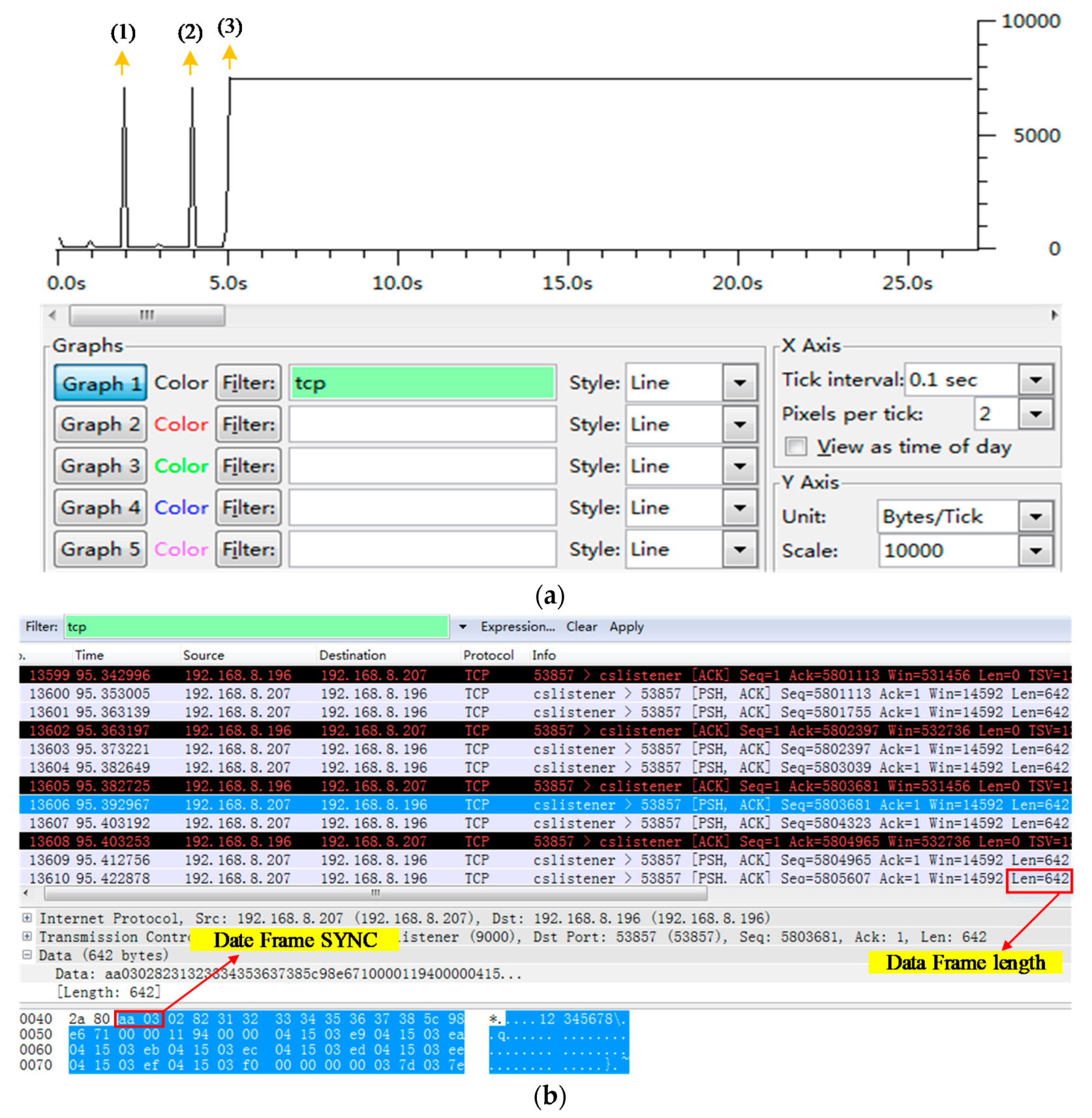
Five PMUs are run on the PMU Emulator. Each PMU is configured with 8 phasors, 42 analog quantities, and 16 digital quantities. First, the standard GB/T 26865.2-2011 protocol is run. The PDC establishes a communication connection with each PMU in the PMU Emulator. The data frame rate is 100 frames/s, and the Main station Emulator is then connected to the PDC. The running result on the main station side is shown in
Figure 10.
In
Figure 10a, the traffic statistics are shown, and the change in traffic can also reflect the communication process. Because all pipelines are based on TCP, the filter condition selects TCP. The data traffic from both the data pipeline and the management pipeline are counted. The horizontal axis is the X-axis, which indicates the time, with a scale unit of 0.1 s. The vertical axis is the Y-axis, with a unit of bytes/Tick, and a scale of 10,000. Peak (1) shows the traffic generated by the CFG1 of the PDC actively summoned by the main station. The PDC aggregates CFG1 of each PMU to generate its own CFG1. Peak (2) depicts that the main station delivers the traffic generated by CFG2. Peak (3) indicates the traffic generated by the PDC uploading the data frame after the PDC starts the real-time data transmission.
Figure 10b illustrates more details of data frames. The first column “No.” indicates the serial number of the frame. The second column “Time” indicates the time of the frame’s issuance or arrival, the unit is in seconds, and the time when the packet capturing starts is set to 0. The third column “Source” indicates the source address. The fourth column “Destination” indicates the destination address. The fifth column “Protocol” indicates the selected transport layer protocol. The sixth column “Info” shows more information about the packet. User can view the details of the packet from below. It can be seen that the time interval of data frames is uniform, at 10 ms, and the length of each data frame is 642 bytes, which contains data of five PMUs. Data frame SYNC is 0xaa03. In both
Figure 10a,b, filter conditions are tcp, statistics data frames, and TCP acknowledgement packets data traffic to more accurately reflect the traffic generated by running the protocol.
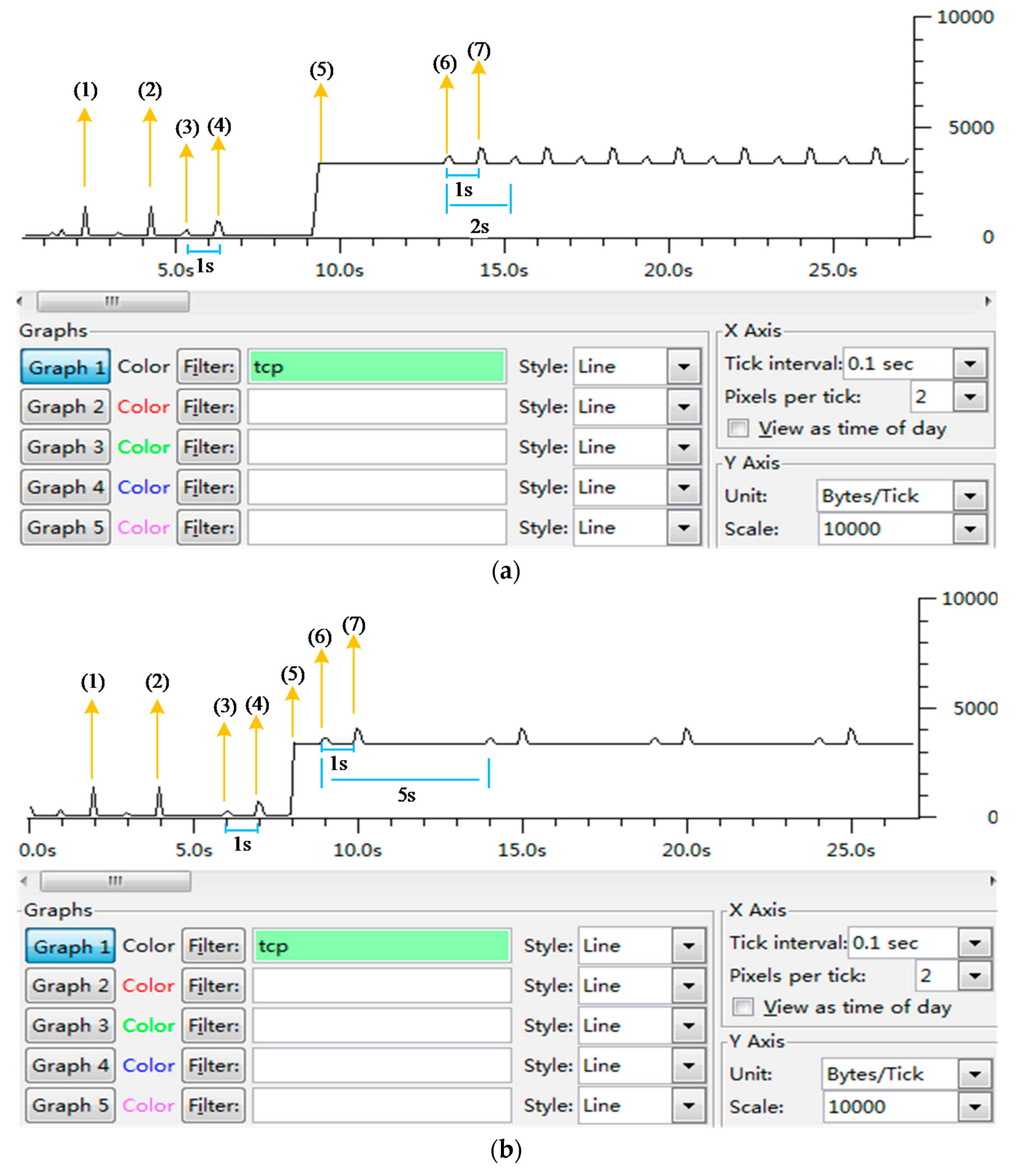
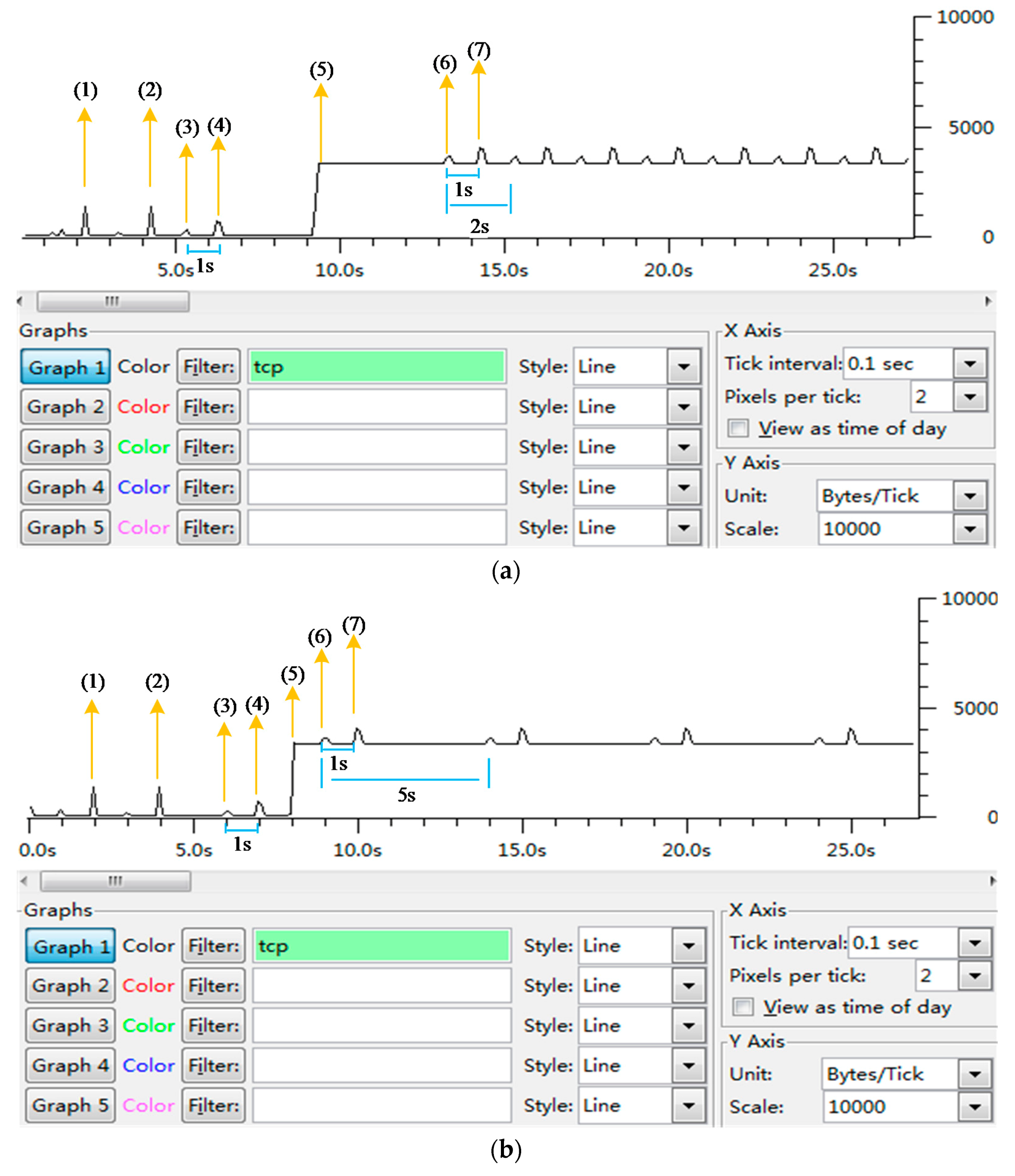
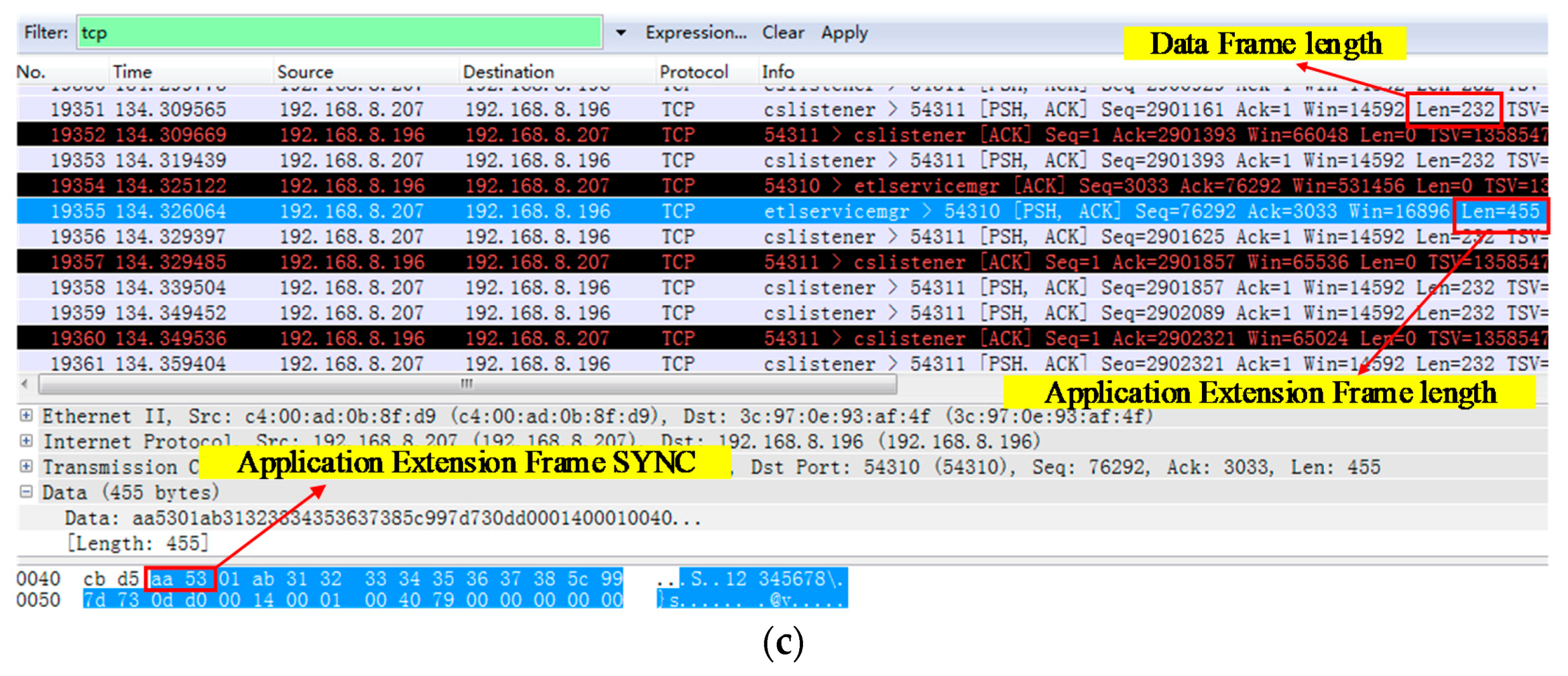
In the next run for the extended specification, the number of PMUs is unchanged, but each PMU retains all phasors and two analog quantities in data frames for transmission, and the remaining 40 analog quantities and all digital quantities are transmitted in application extension frames. These analog and digital quantities are configured in the device’s initialization point table and are not transmitted in CFG1 and CFG2. The transmission period of application extension frames, which contain analog and digital quantities, can be modified. Here, we choose 2 s and 5 s as the transmission cycle in turn. After starting the communication, the running result on the main station side is shown in
Figure 11.
Figure 11a,b shows data traffic statistics, and the parameters of the coordinate system are the same as those of
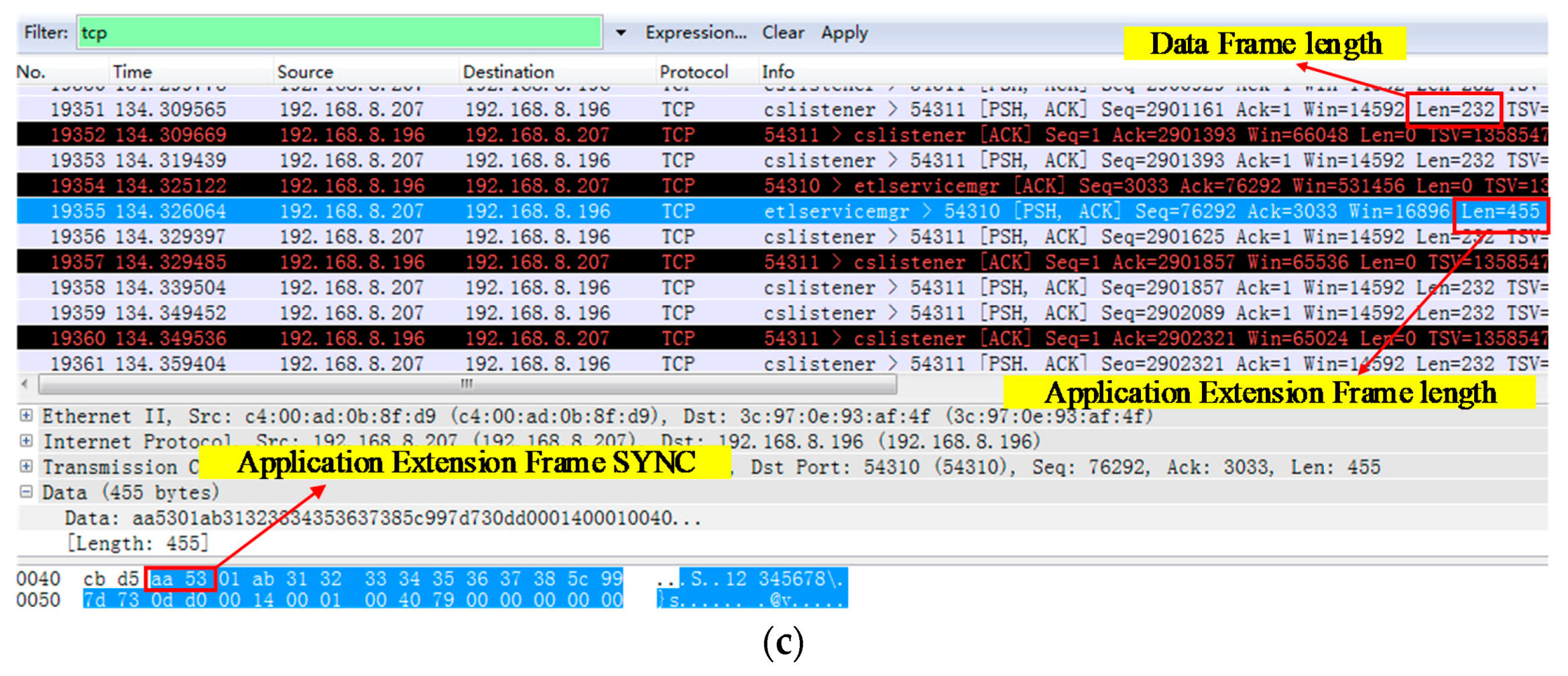
Figure 10a. Peak (1) shows the traffic generated by the CFG1 of the PDC actively summoned by the main station. Peak (2) depicts that the main station delivers the traffic generated by CFG2. In response to the total summon, Peak (3) indicates the traffic generated by the PDC uploading application extension frames with digital quantities. Peak (4) illustrates the traffic generated by the PDC uploading application extension frames with analog quantities. The interval between the two types of data is 1 s. Peak (5) indicates the traffic generated by the PDC uploading the data frame after the PDC starts the real-time data transmission. After the real-time data transmission is enabled, a command is issued to start the periodic transmission of application extension frames. The meanings of Peaks (6) and (7) are the same as Peak (3) and (4). As can be seen from (c), the data frame length is significantly lower than the standard protocol data frame length. The length of a single application extension frame is long, but the transmission period is long and has little effect on traffic. Application extension frame SYNC is 0xaa53. As can be seen in conjunction with
Figure 10 and
Figure 11, data traffic has been significantly reduced after the implementation of the extended protocol.
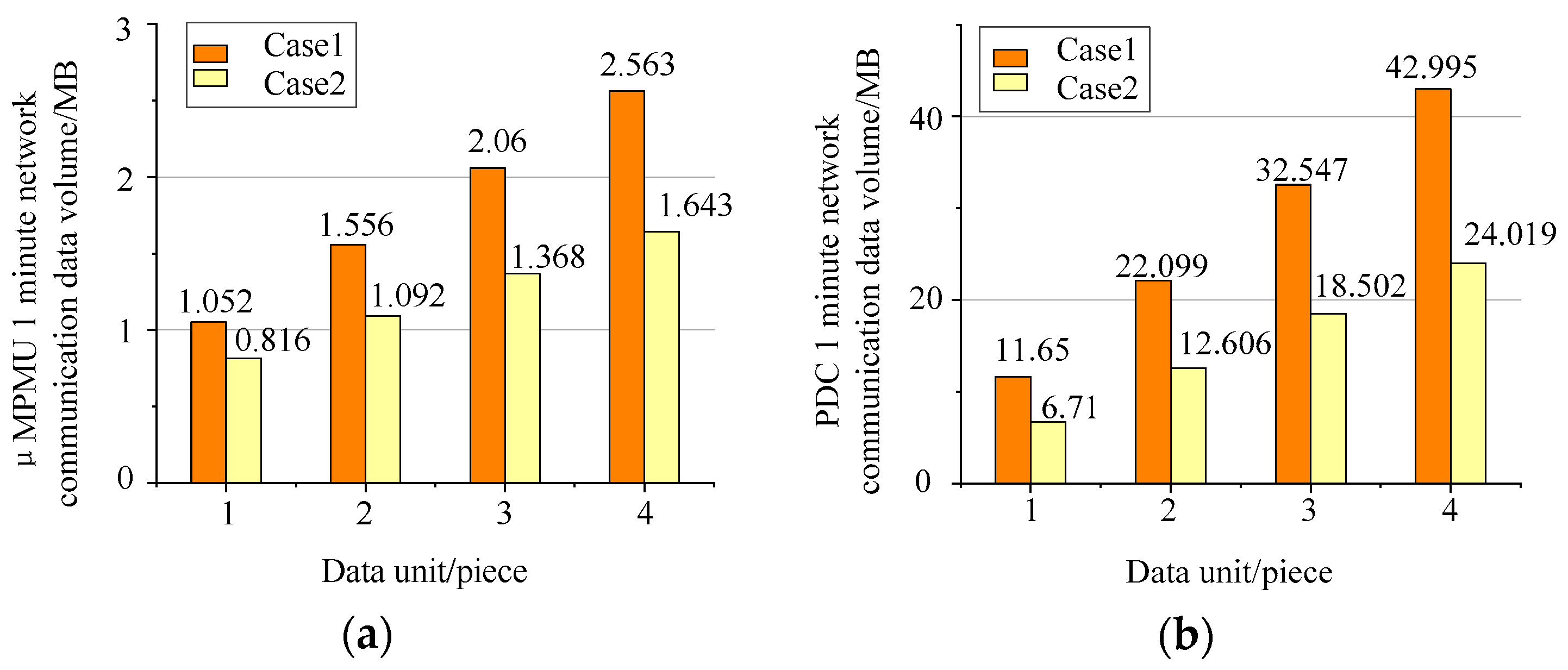
In order to show more the effectiveness of this method in reducing data traffic, assuming one distribution network PDC communicates with 20 μMPMUs and one master station and sets 12 phasors (which compose of three-phase voltage, three-phase current, voltage, and current symmetrical components of phase a), 20 analog quantities (including active power P, reactive power Q, voltage, and current of 3, 5, 7 harmonics of each phase), and 4 digital quantities (such as external signal light, relay) to form one data unit. The setting of the data unit is same as the configuration of the μMPMU in the actual project. Two cases are explored here: Case 1 shows the calculation results according to the standard protocol; Case 2 corresponds to the calculation result using the method from this work.
Rdata selects the maximum value of 100 frames/s, and both
and
select 0.2 frames/s, and the unit length is set to 1 min. Considering the diverse application scenarios of μMPMU and PDC, the number of data units is between 1 and 4. The
Mdata of the two examples is calculated by using Equations (6) and (13). The result is shown in
Figure 12. The abscissa is the data unit quantity, and the ordinate is the 1 min network communication data amount, and the unit is megabyte (MB).
It can be seen from the calculation results shown in
Figure 12 that the numerical value of Case 2 is smaller than the numerical value of Case 1 for a single μMPMU or PDC. As the amount of data units increases, the ratio between the value of Case 2 to the value of Case 1 decreases. The percentage in
Figure 12a decreased from 77.57 to 64.1%, and the percentage in
Figure 12b dropped from 57.6 to 55.86%, which further indicates the effectiveness of the proposed method in reducing the amount of network communication traffic.
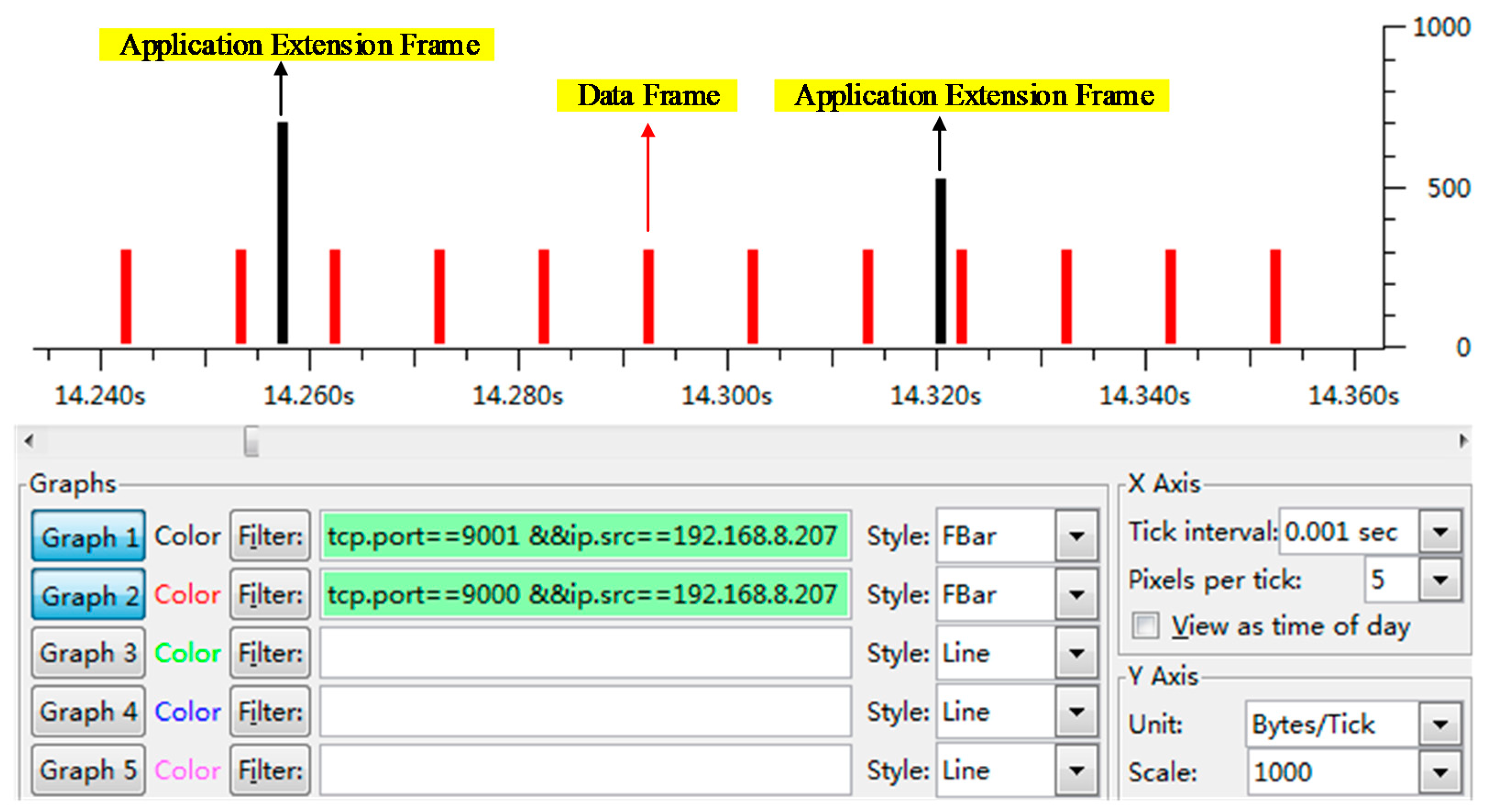
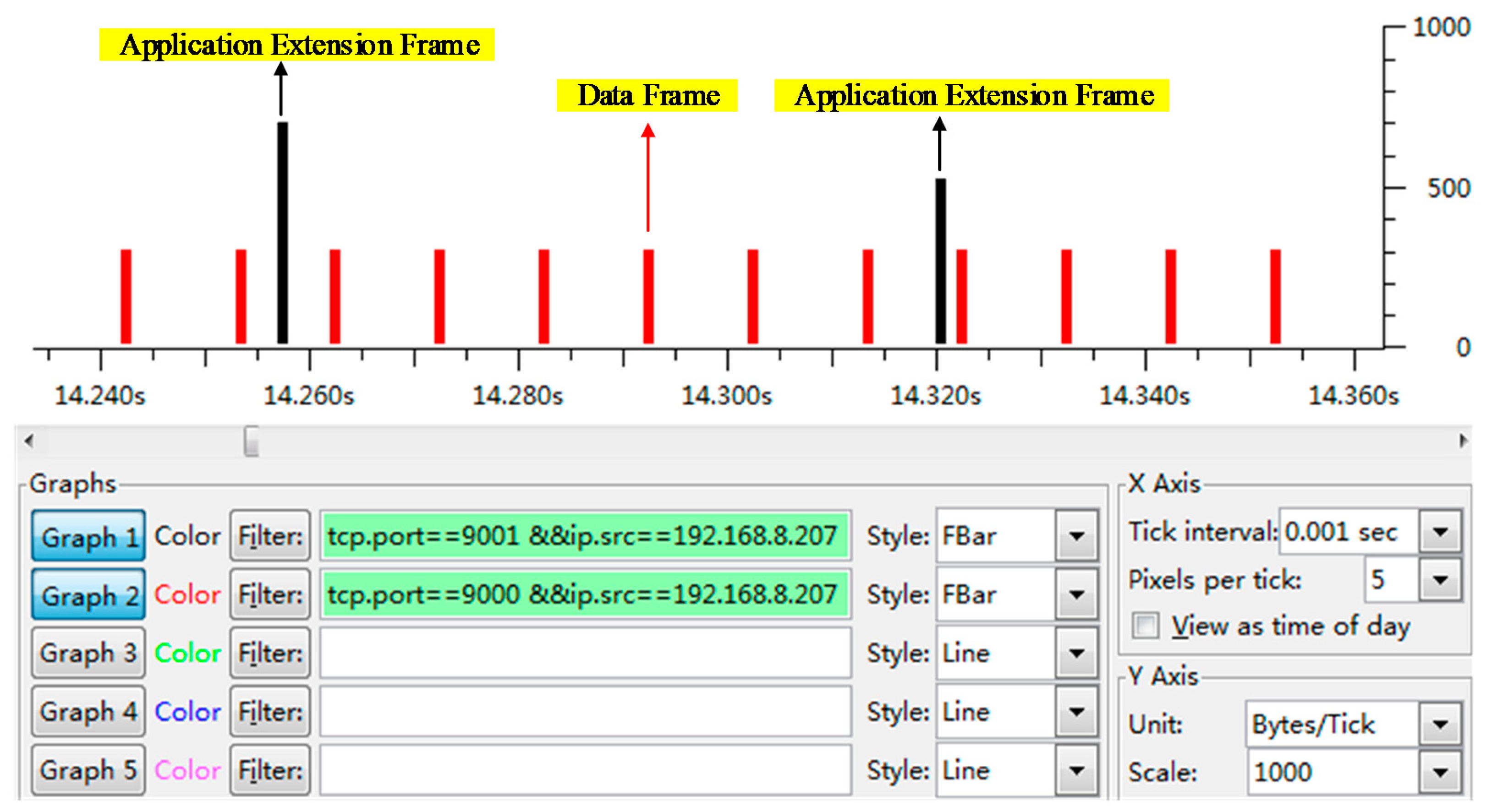
With the time scale selected as 0.001 s, which is 1ms, more details can be observed. In order to avoid interference of the rest of the data with the result, the filter is set to display only data from the PDC’s data pipeline and command pipeline. Whether it is an application extension frame containing analog or digital quantities, its single frame length is limited, so when the data that is to be transmitted is too large, it is divided into multiple frames.
Figure 13 shows this situation. At the same time, due to the data priority processing, two application extended frames containing the same type of information are not sent together, but the second frame is sent after multiple data frames are sent. The uniform transmission of the data frames is not affected.
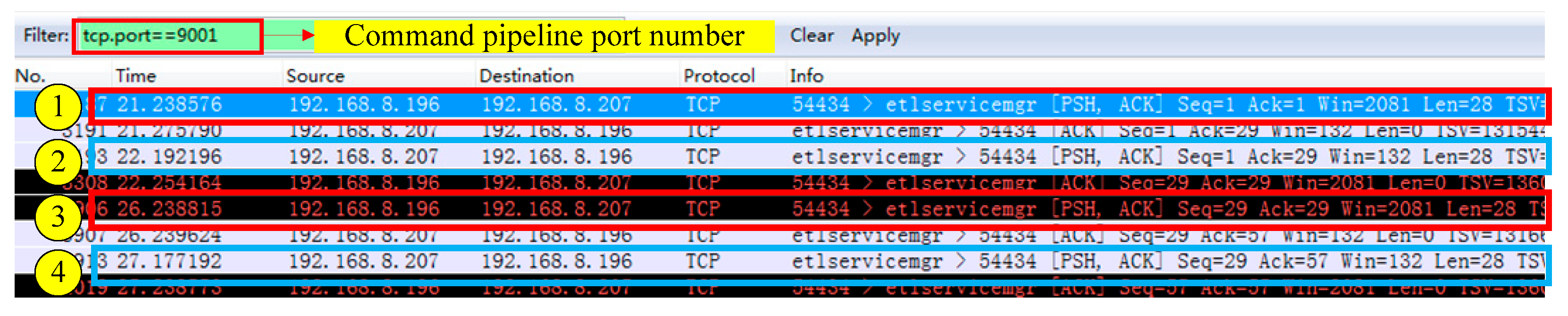
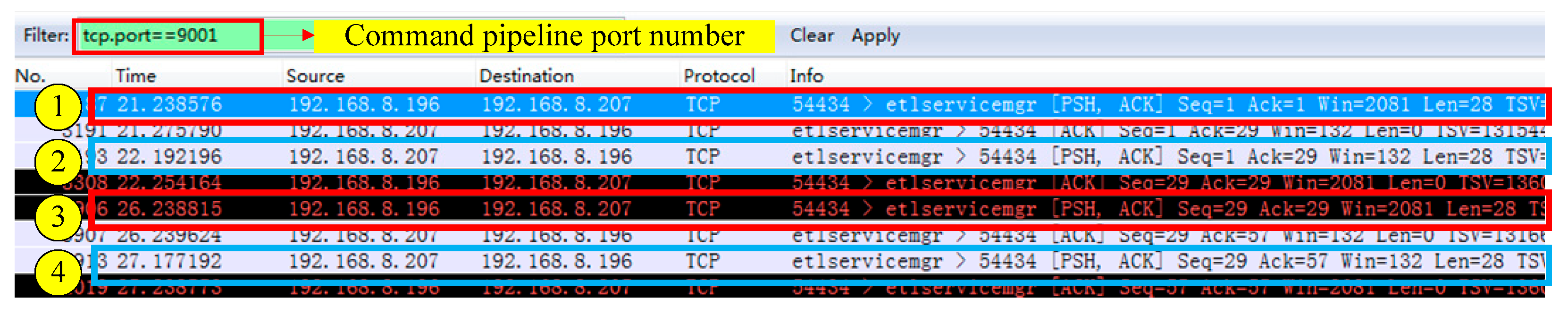
The test result for the remote control function is shown in
Figure 14. The filter condition is the port number of the PDC command pipeline. Here, ① is a remote control selection message sent by the main station, ② is a remote control confirmation message of the PDC reply, ③ is a remote control execution message sent by the main station, and ④ is a remote control execution confirmation message of the PDC reply. The remote control process of the PDC and the PMU is the same as the above process, in which the PDC plays the role of forwarding information and mapping remote control points.
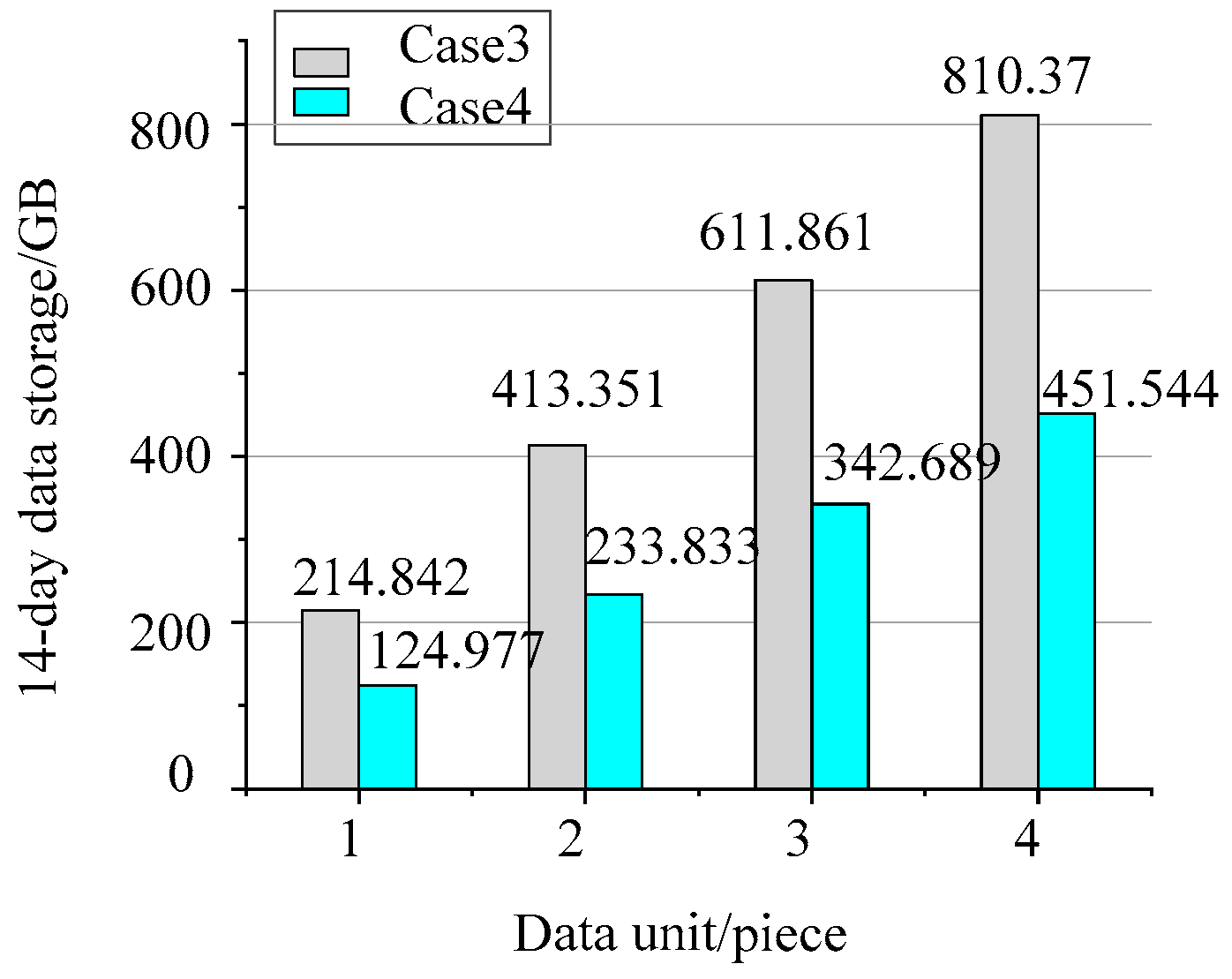
According to GB/T 26865.2-2011, a dynamic data record file is generated every minute, including the CFG-1 frame and 100 data frames per second. The data unit configuration is the same as when the above traffic calculation. Consider two cases here: Case 3 shows the calculation results according to the standard protocol; Case 4 shows the calculation result using the method from this work. The analog and digital quantities are all placed in application extension frames, the period is set to 5 s, and an application extension file is generated every minute to store the application extension frames. The space occupied by the 14-day data storage in the PDC is then calculated. The result is shown in
Figure 15. The abscissa is the data unit quantity, the ordinate is the 14-day storage occupation, and the unit is gigabyte (GB).
It can be seen from the calculated results shown in
Figure 15 that the data generated from Case 2 are always smaller than Case 1 among different data unit ranges. As the number of data units increased from 1 to 4, Case 2 decreased from 58.17% of Case 1 to 55.72%, indicating the effectiveness of the method in reducing the amount of data stored.
5.4. In Field Application
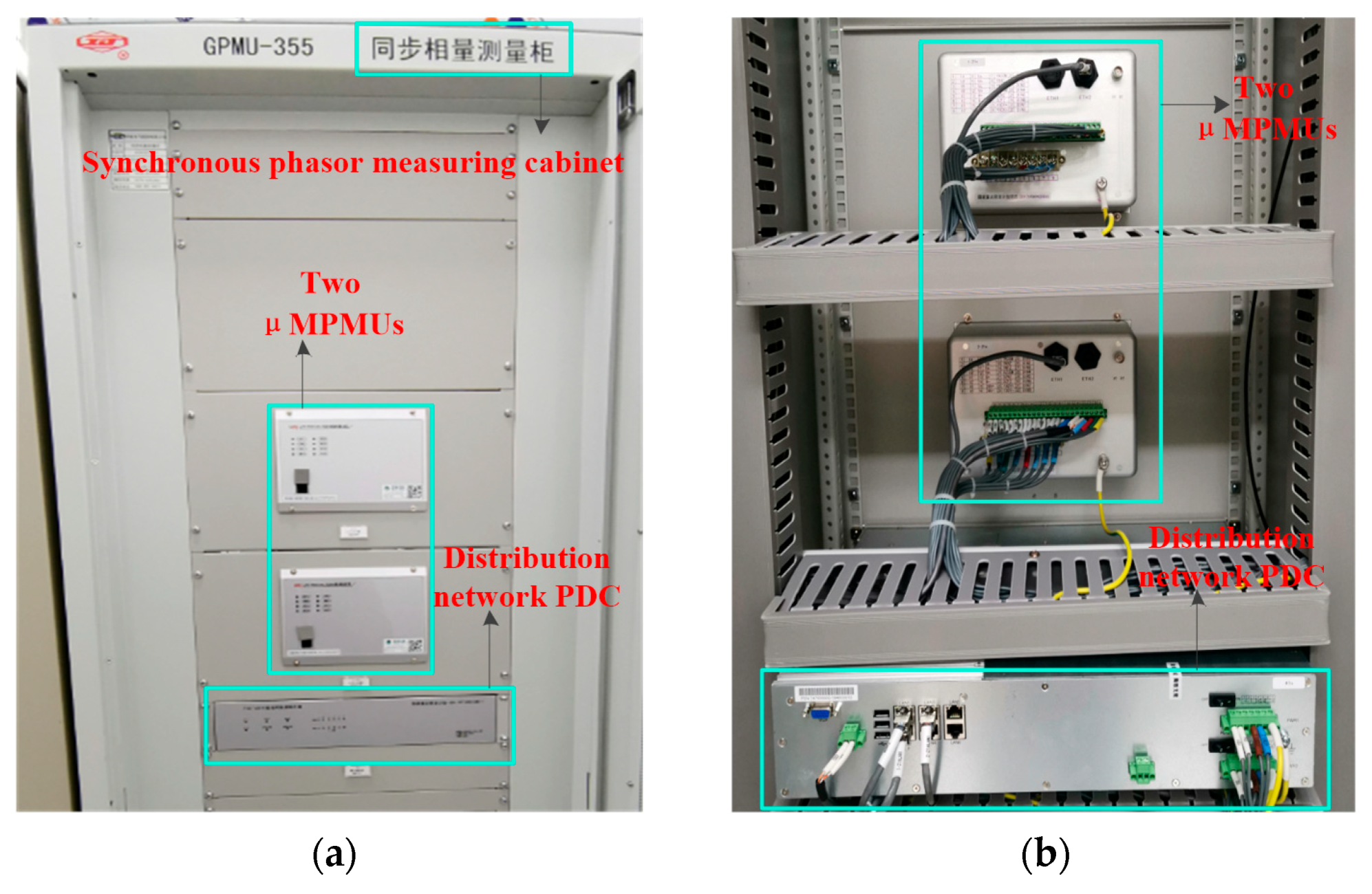
A distribution network PDC and two μMPMUs were deployed at a 35 KV substation in Pudong New Area, Shanghai.
Figure 16 shows their installation and wiring. Two μMPMUs monitor different feeders respectively. The data configuration is same as the data unit above, and data such as phasor, analog quantity, switch quantity, and file are transmitted with different priorities. The effect of the on-site operation is positive, and the transmission of phasor data will not be disturbed during the progress of other tasks. The project is still ongoing and will be configured with increasing number of μMPMUs in the future.
6. Conclusions
As intermittent distributed energy resources such as photovoltaic power generation are widely connected to the distribution network, the power quality, as well as the safe and reliable operation of the distribution network, face new challenges. Wide area measurement control and protection technology based on a synchronous clock is an important and effective means to solve related problems. In the distribution network, WAMS technologies are mainly used for protection and active control. The WAMS shares the communication channel with the distribution automation system. The IEC 60870-5-101/104 protocol of the distribution network SCADA is integrated into the WAMS communication protocol, thereby increasing the functionality and efficiency of the WAMS communication protocol and distribution automation systems, enhancing the ability of the traditional distribution network to absorb intermittent distributed energy resources, improving the reliability and power quality of the distribution network. The main conclusions of this paper are as follows:
Based on the analysis of the communication requirements of the active distribution network, this paper compares the distribution network SCADA and the transmission network WAMS, and obtains the application scenarios, functions, and performance requirements of the μMPMU;
The GB/T 26865.2-2011 and IEC 60870-5-101/104 protocols are compared. By analyzing the applicable parts of each protocol on the μMPMU, a priority-based synchronization phasor transmission protocol expansion method for active distribution networks is proposed;
The method is based on the existing GB/T 26865.2-2011 protocol, and refers to the Application Service Data Unit (ASDU) of IEC 60870-5-101/104 to add an application extension frame, which increases file types, divides the data priority, increases communication processes, such as total summoning and remote control, and gives data flow calculation methods;
The μMPMU multi-priority data processing model was proposed;
The experimental environment is built using the self-developed PMU Emulator, distribution network PDC, and Main station Emulator. Some technical details of them are introduced;
By running the standard GB/T 26865.2-2011 protocol and extended protocol, the effectiveness of the method in reducing the amount of communication data, the effectiveness of the data prioritization model and the implementation of the remote control function are verified;
The calculation results of the file storage also indicate the effectiveness of the method in reducing the amount of stored data.
The phasor transmission protocol GB/T 26865.2-2011 and IEEE C37.118.2-2011 are Chinese standards and international standards, respectively, which have basically the same message structure and communication process. The method in this paper is easy to use for the integration of IEEE C37.118.2-2011 and IEC 60870-5-101/104 protocols, so that they can both be used in distribution network WAMS in other countries and regions. Further work of the author’s team will use compression techniques for phasor transmission and waveform file transmission, so that the distribution network WAMS can communicate more efficiently using the LTE 230MHz wireless power private network and the broadband power line carrier.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}