Low-Frequency Magnetic Scanning Device and Algorithm for Determining the Magnetic and Non-Magnetic Fractions of Moving Metallurgical Raw Materials

 , , and
, , and
Abstract
:1. Introduction
Physical Background of the Method
2. Materials and Methods
2.1. Experimental Setup and Calculation Principle
2.2. Measurement Method
- (1)
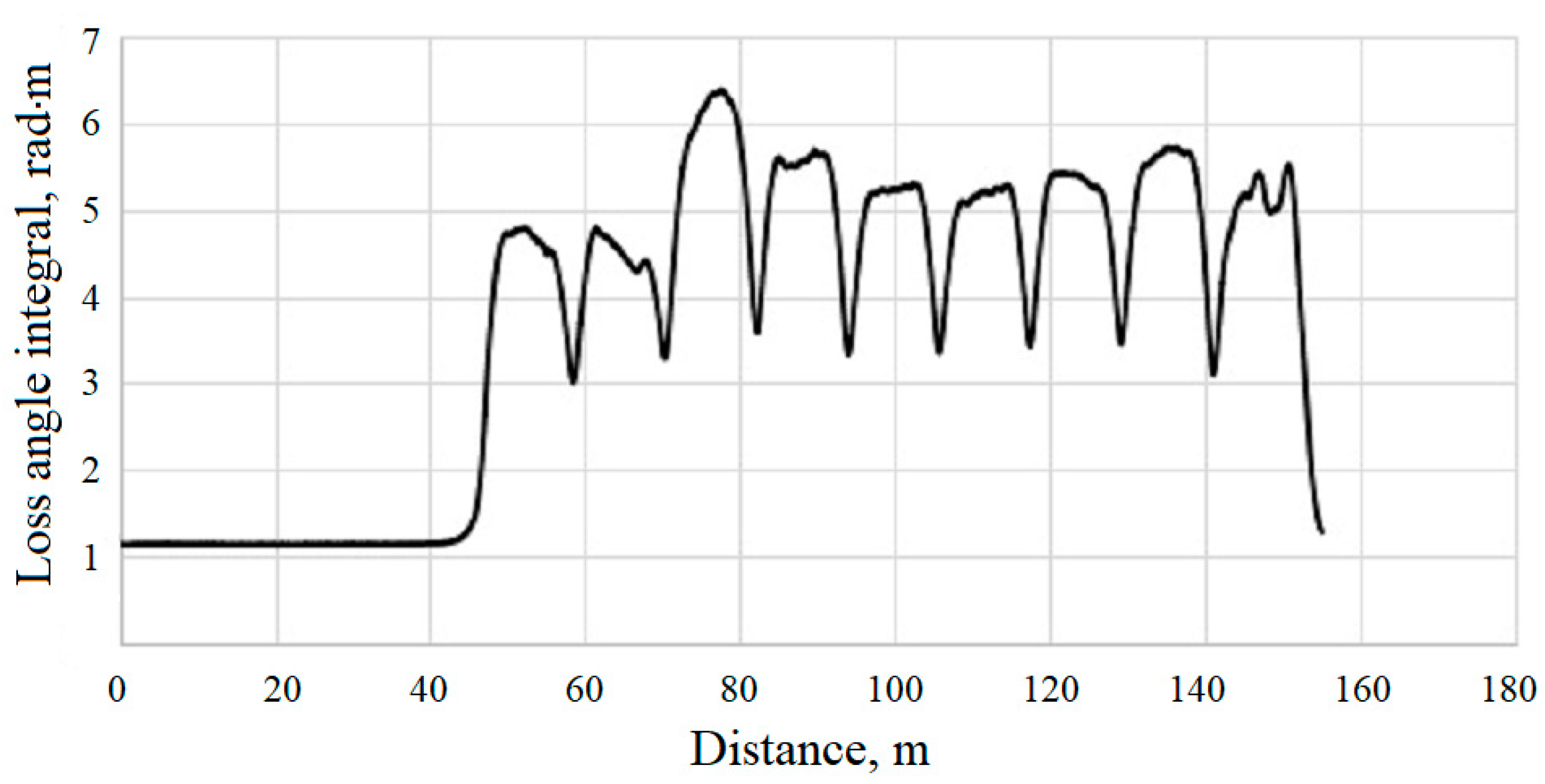
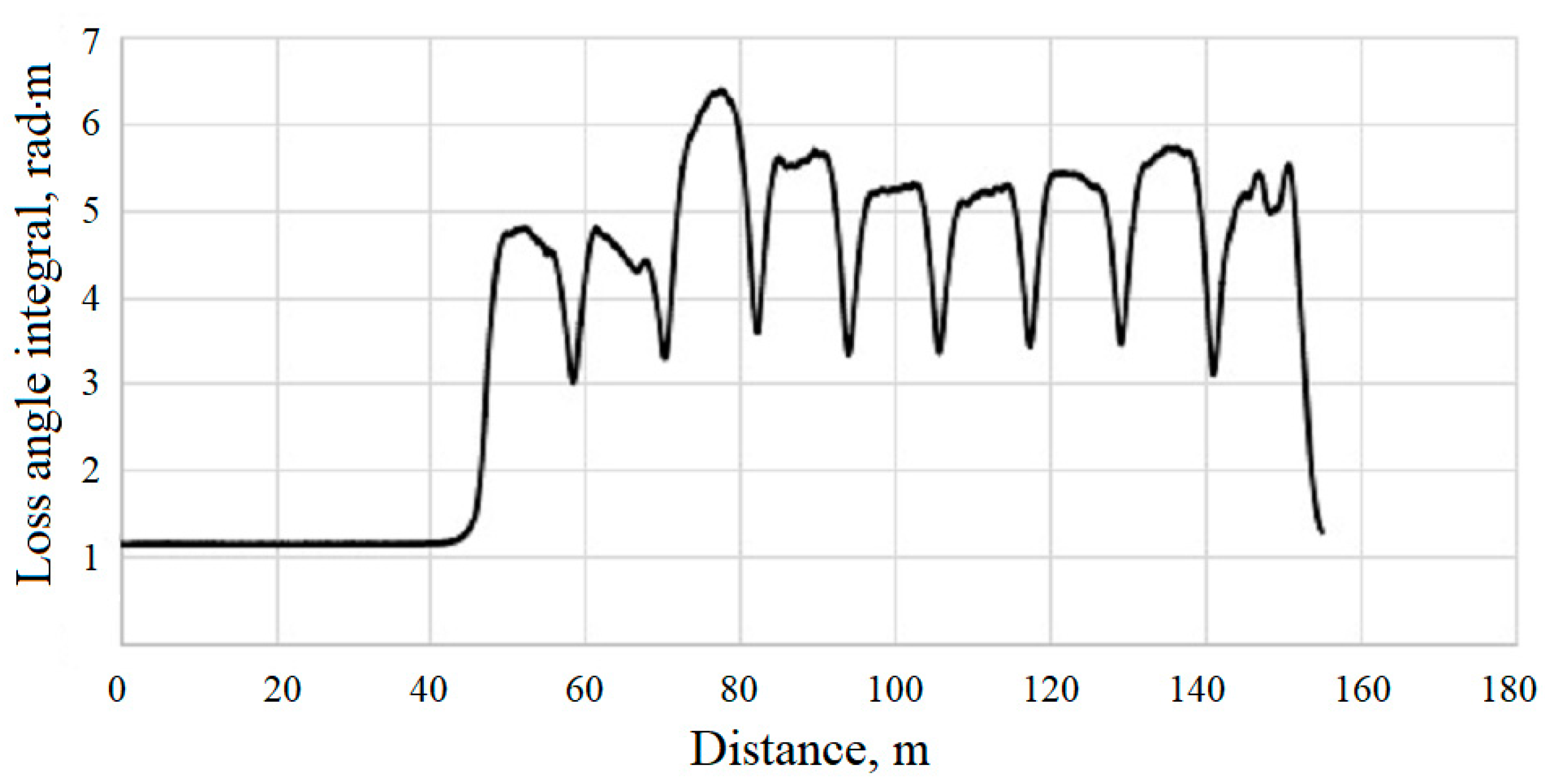
- Calculation of the instantaneous values of the angle of loss as a function of the coordinates along the length of the car.
- (2)
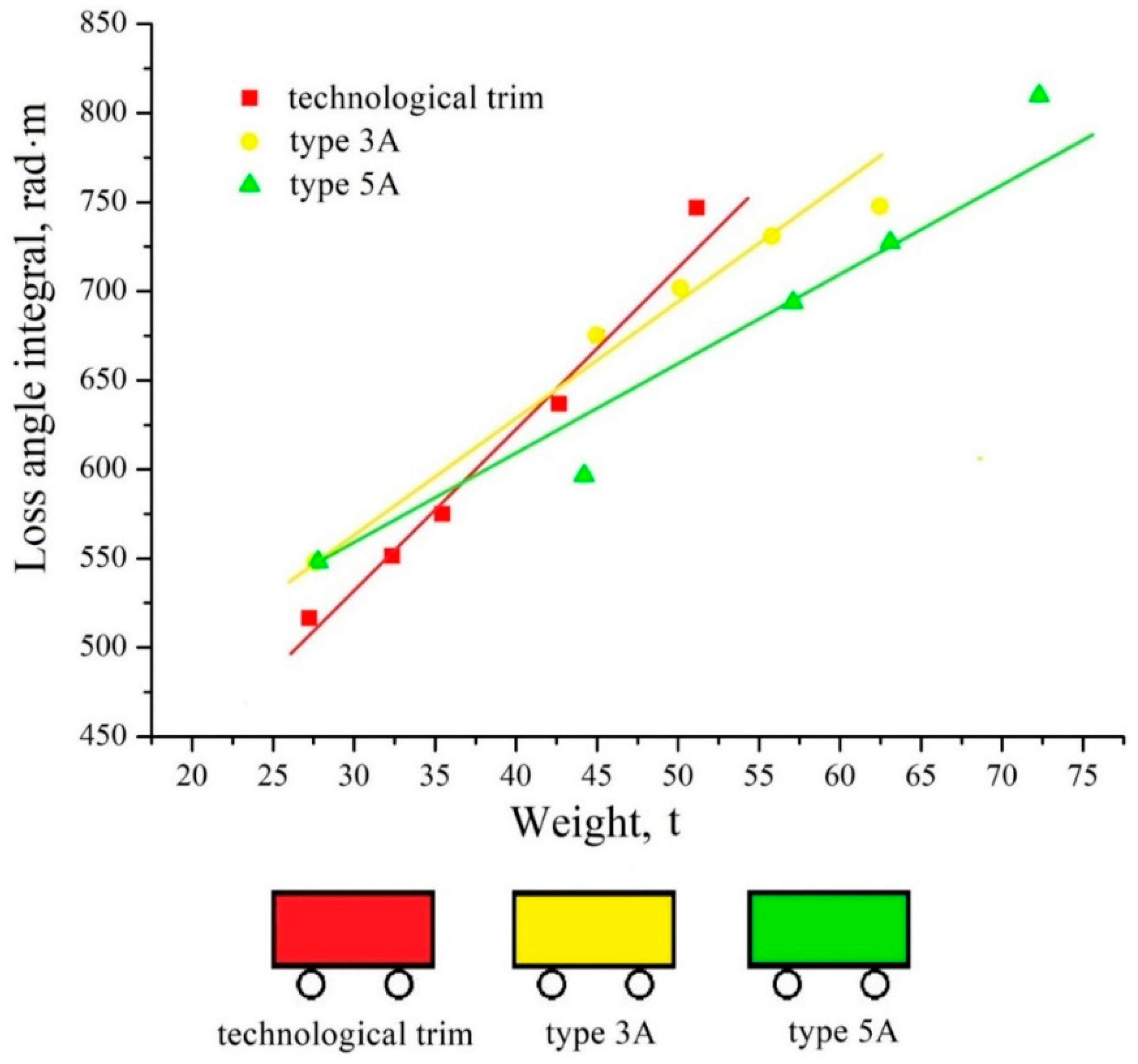
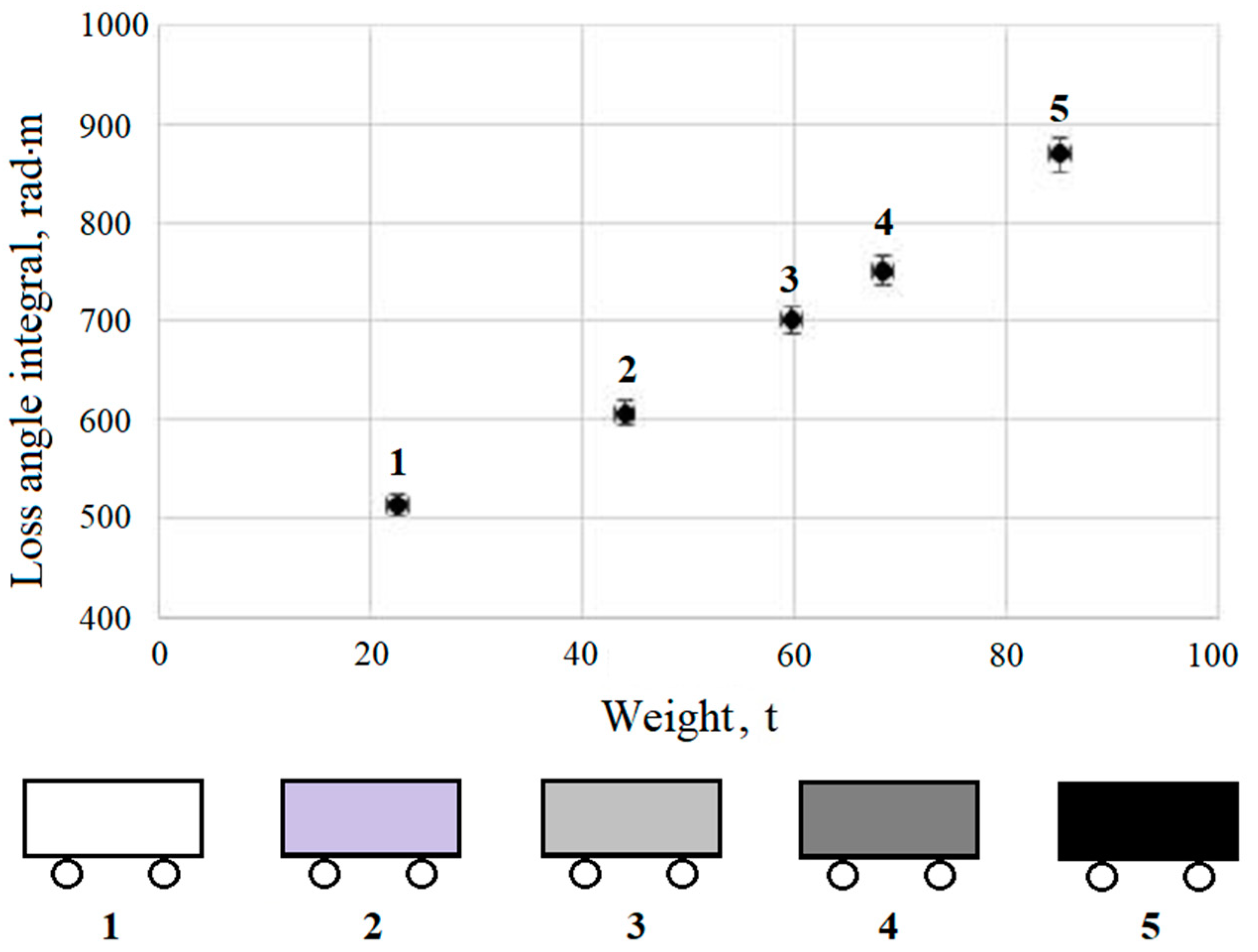
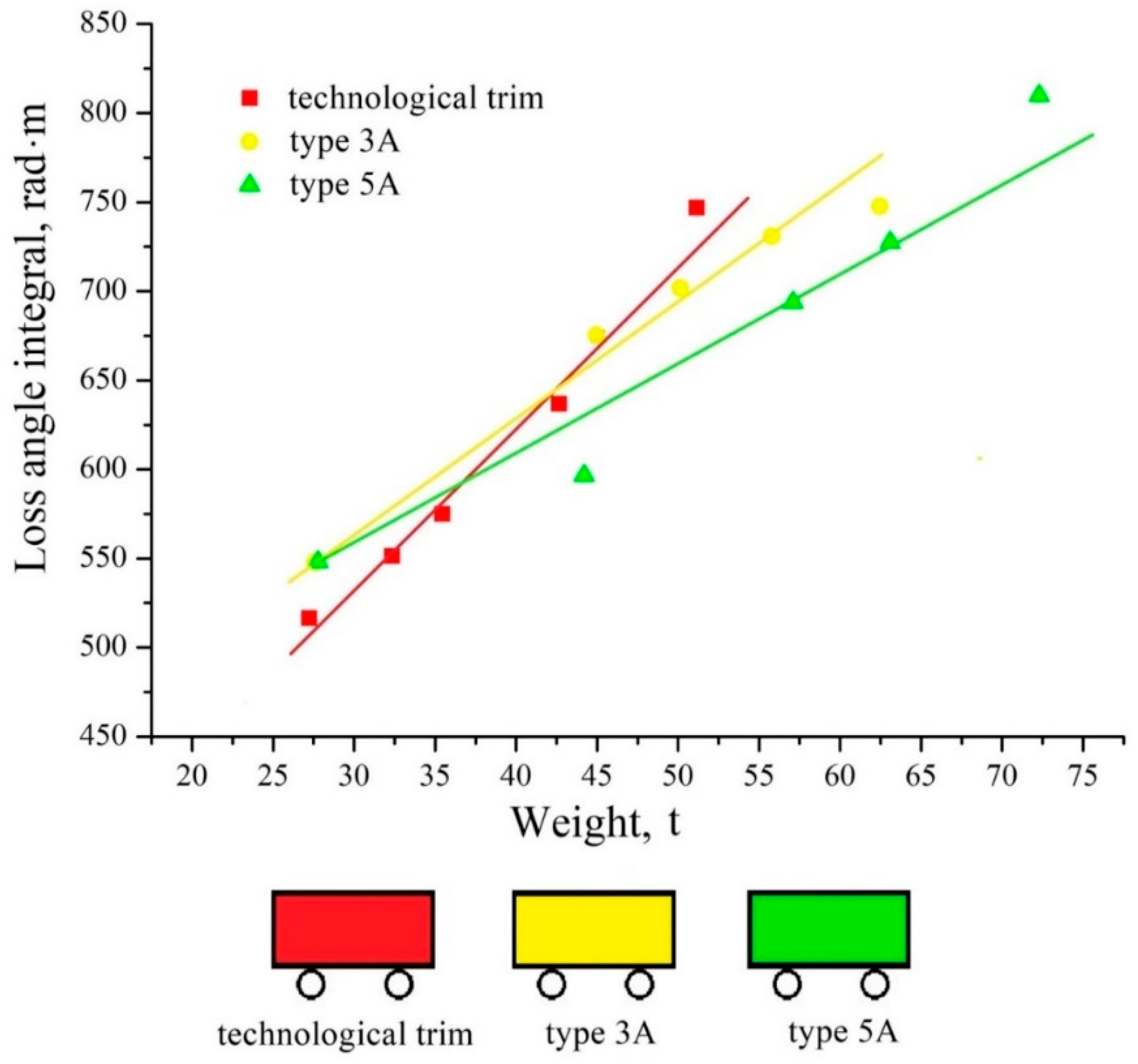
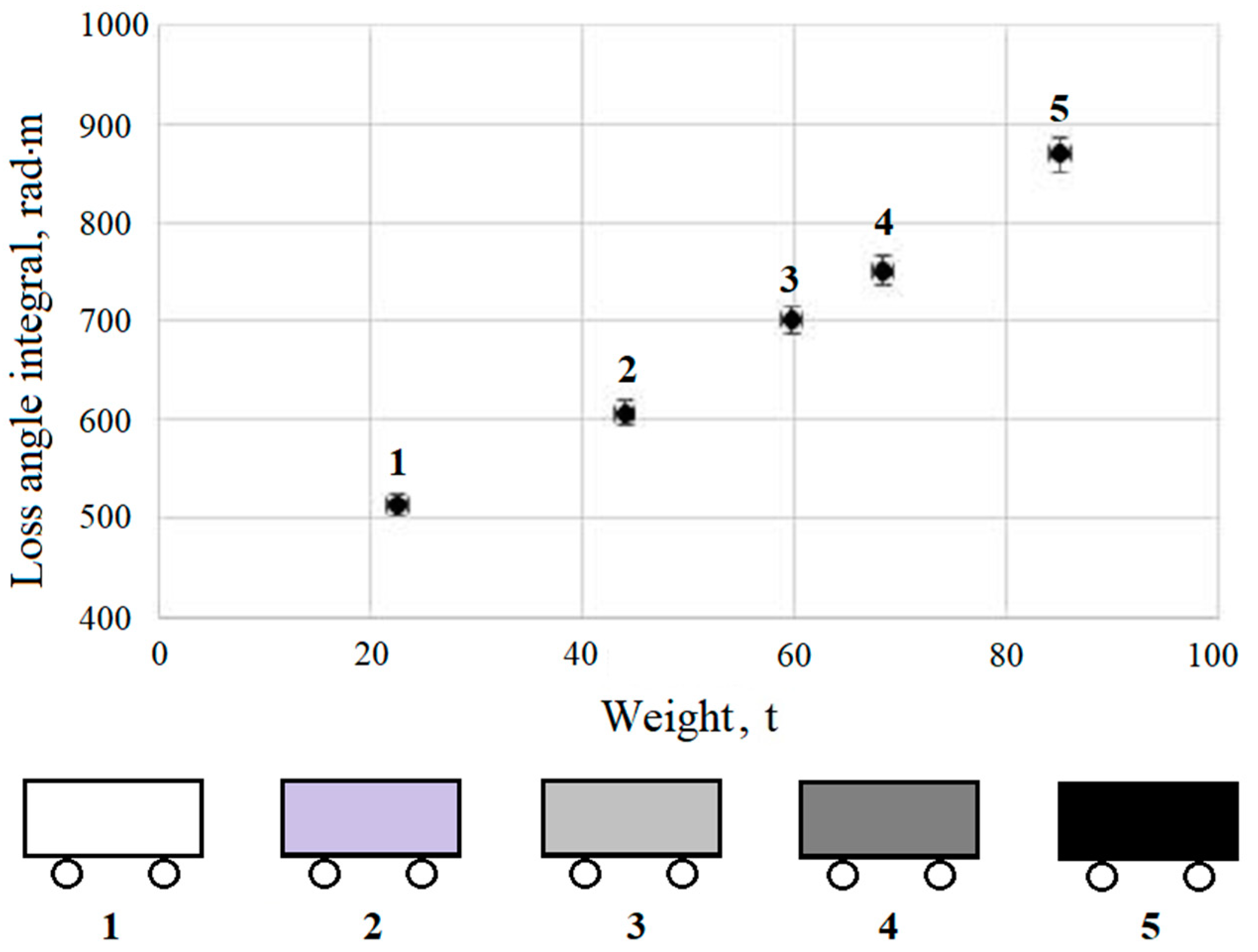
- Calculation of the mass of scrap metal as a function of the integral of the loss angle:where is a function describing the dependence of the mass of the core (car with a load) on the integral of the loss angle.
- (3)
- Then, the percentage ratio of the mass of the non-magnetic composition and the ferromagnetic material is calculated:where is the total weight of the vehicle with a load measured using scales, is the mass of the ferromagnetic material, and mn is the percentage of non-magnetic additive.
2.3. Measurement Result Calculation
- (1)
- The signal (voltage and current) from the coil windings is digitized at a 62,500 Hz frequency;
- (2)
- The digitized signal is processed using Fourier transformation; and
- (3)
- The algorithm input is the interval of a signal that equals three whole cycles at the generator’s actual frequency.
3. Results and Discussion
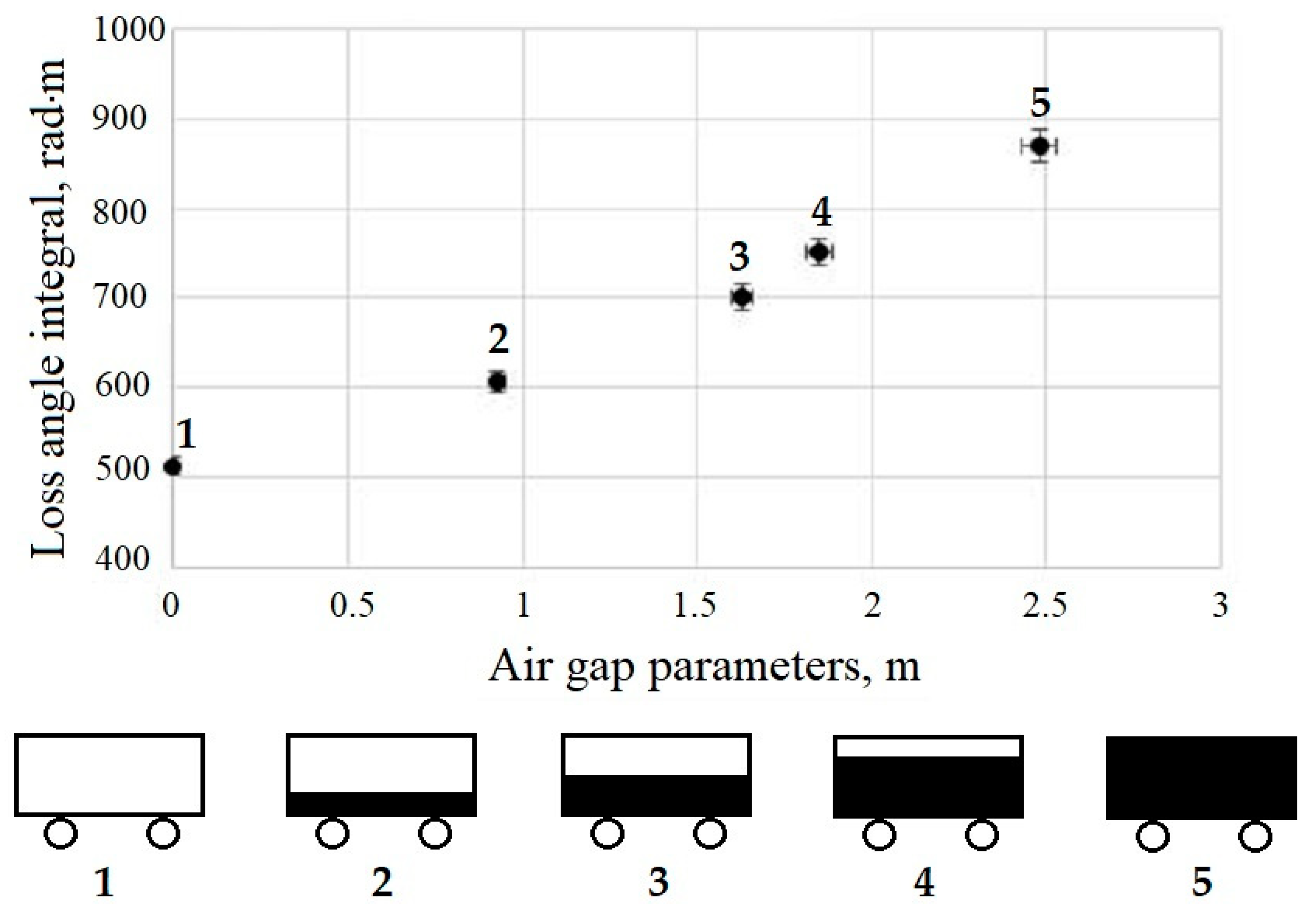
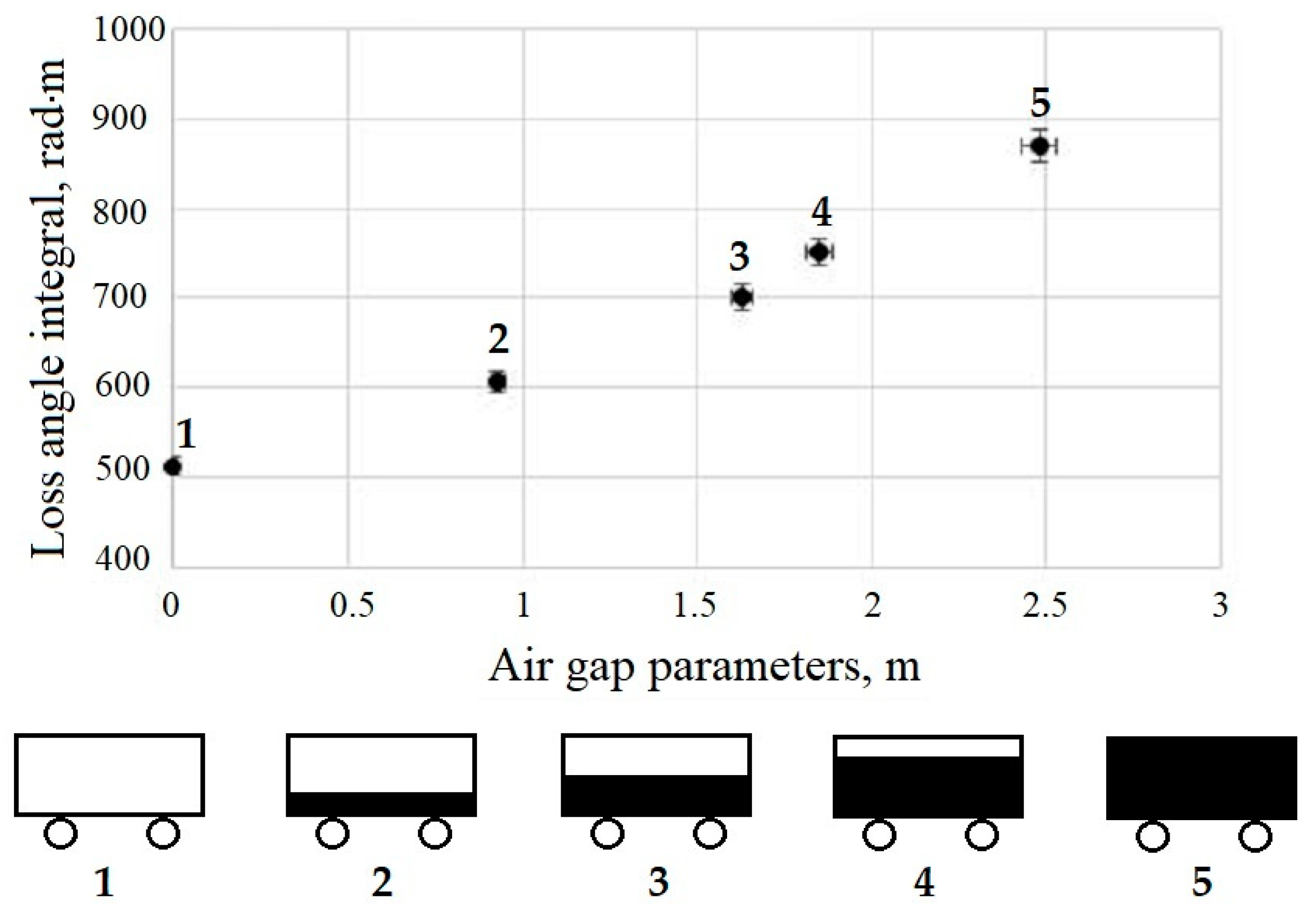
- (1)
- Measurement of integral of dielectric losses envelope curve for ferromagnetic freight of known mass;
- (2)
- Measurement of integral of dielectric losses envelope curve for same freight with addition of known quantity of non-magnetic material (quartz sand); and
- (3)
- Freight container (railcar of known mass) undergoing the same procedure.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moffat, G.; Williams, R.A.; Webb, C.; Stirling, R. Selective separations in environmental and industrial processes using magnetic carrier technology. Miner. Eng. 1994, 7, 1039–1056. [Google Scholar] [CrossRef]
- Svoboda, J.; Fujita, T. Recent developments in magnetic methods of material separation. Miner. Eng. 2003, 16, 785–792. [Google Scholar] [CrossRef]
- Duan, X.; Cheng, J.; Zhang, L. X-ray cargo container inspection system with few-view projection imaging. Nucl. Instrum. Methods Phys. Res. Sect. A 2009, 598, 439–444. [Google Scholar] [CrossRef]
- Orphan, V.J.; Muenchau, E.; Gormley, J.; Richardson, R. Advanced γ ray technology for scanning cargo containers. Appl. Radiat. Isot. 2005, 63, 723–732. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, K.; Preetz, H.; Igel, J. Soil properties and performance of landmine detection by metal detector and ground-penetrating radar—Soil characterization and its verification by a field test. J. Appl. Geophys. 2011, 73, 368–377. [Google Scholar] [CrossRef]
- Volberding, R.W. Cargo container inspection test program at ARPA’s Nonintrusive Inspection Technology Testbed. In Proceedings of the Cargo SPIE’s 1994 International Symposium on Optics, Imaging, and Instrumentation, San Diego, CA, USA, 6 October 1994. [Google Scholar]
- Gencer, N.G.; Tek, M.N. Electrical Conductivity Imaging via Contactless Measurements. IEEE Trans. Med. Imaging 1999, 18, 617–627. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, H. Magnetic induction tomography. Meas. Sci. Technol. 2001, 26, 1126–1131. [Google Scholar] [CrossRef]
- Gursoy, D.; Scharfetter, H. Reconstruction artefacts in magnetic induction tomography due to patient’s movement during data acquisition. Physiol. Meas. 2009, 30, 165–174. [Google Scholar] [CrossRef] [PubMed]
- Korzhenevskii, A.V.; Cherepenin, V.A. Magnetic induction tomography. J. Commun. Technol. Electron. 1997, 42, 469–474. [Google Scholar]
- Morris, A.; Griffiths, H.; Gough, W. A numerical model for magnetic induction tomographic measurements in biological tissues. Physiol. Meas. 2001, 22, 113–119. [Google Scholar] [CrossRef] [PubMed]
- Rudolph, D.J.; Willes, P.M.; Sameshima, G.T. A finite element model of apical force distribution from orthodontic tooth movement. Angle Orthod. 2001, 71, 127–131. [Google Scholar] [CrossRef] [PubMed]
- Hakim, N.S.; King, A.I. A three-dimensional finite element dynamic response analysis of a vertebra with experimental verification. J. Biomech. 1979, 12, 277–292. [Google Scholar] [CrossRef]
- Smith, I.M.; Griffiths, D.V.; Margetts, L. Programming the Finite Element Method, 5th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Vonsovskiy, S.V. Magnetism; Nauka: Moscow, Russia, 1971. (In Russian) [Google Scholar]
- Grossi, M.; Riccò, B. Electrical impedance spectroscopy (EIS) for biological analysis and food characterization: A review. J. Sens. Sens. Syst. 2017, 6, 303–325. [Google Scholar] [CrossRef]
- Callegaro, L. Electrical Impedance: Principles, Measurement and Applications; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Unit |
|---|---|---|
| Range of alternating current in primary winding | 2.00–8.00 ± 0.05 | A |
| Range of alternating magnetic field strength | 100–1000 | A/m |
| Range of alternating current frequency | 20–100 ± 1 | Hz |
| Windings real resistance (Ω) | ||
| -magnetizing winding | 1 ± 0.2 | Ω |
| -measuring winding | 12.5 ± 2 | Ω |
| Estimated value of the measuring coil cross-section area | 43.43 ± 0.01 | m2 |
| Reference value of magnetic flux in air | 1.9·10−2 | Wb |
| Range of magnetic flux measurement | 1.5 × 10−2–6.0 × 10−2 | Wb |
| Dimensions of measuring coil | 7190 × 6040 × 740 | mm |
| No. | Manufacturer Railcar No. | Type of Scrap (Figure 4) | Total Mass (t) | Empty Car Weight (t) | Wall Height of Railcar (m) | Non-Magnetic Percentage (%) |
|---|---|---|---|---|---|---|
| 1 | 54210059 | 5A | 72.12 | 22.10 | 3.2 | 5.1 |
| 2 | 96632757 | 3A | 85.46 | 21.85 | 3.5 | 3.8 |
| 3 | 96631205 | 5A | 82.67 | 23.20 | 3.5 | 7.2 |
| 4 | 52318037 | 5A | 80.70 | 22.70 | 3.5 | 7.1 |
| 5 | 54035589 | 5A | 78.15 | 22.20 | 3.2 | 5.8 |
| 6 | 56171465 | 5A | 81.10 | 23.47 | 3.5 | 8.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kochemirovsky, V.A.; Kochemirovskaia, S.V.; Malygin, M.A.; Kuzmin, A.G.; Novomlinsky, M.O.; Fogel, A.A.; Logunov, L.S. Low-Frequency Magnetic Scanning Device and Algorithm for Determining the Magnetic and Non-Magnetic Fractions of Moving Metallurgical Raw Materials. Appl. Sci. 2019, 9, 2001. https://doi.org/10.3390/app9102001
Kochemirovsky VA, Kochemirovskaia SV, Malygin MA, Kuzmin AG, Novomlinsky MO, Fogel AA, Logunov LS. Low-Frequency Magnetic Scanning Device and Algorithm for Determining the Magnetic and Non-Magnetic Fractions of Moving Metallurgical Raw Materials. Applied Sciences. 2019; 9(10):2001. https://doi.org/10.3390/app9102001
Chicago/Turabian StyleKochemirovsky, Vladimir A., Svetlanav V. Kochemirovskaia, Michael A. Malygin, Alexey G. Kuzmin, Maxim O. Novomlinsky, Alena A. Fogel, and Lev S. Logunov. 2019. "Low-Frequency Magnetic Scanning Device and Algorithm for Determining the Magnetic and Non-Magnetic Fractions of Moving Metallurgical Raw Materials" Applied Sciences 9, no. 10: 2001. https://doi.org/10.3390/app9102001
APA StyleKochemirovsky, V. A., Kochemirovskaia, S. V., Malygin, M. A., Kuzmin, A. G., Novomlinsky, M. O., Fogel, A. A., & Logunov, L. S. (2019). Low-Frequency Magnetic Scanning Device and Algorithm for Determining the Magnetic and Non-Magnetic Fractions of Moving Metallurgical Raw Materials. Applied Sciences, 9(10), 2001. https://doi.org/10.3390/app9102001