Response Prediction and Monitoring Feasibility of a Stow Net System Using Measured Environmental Data in the Southwest Coast of Korea



Abstract
:1. Introduction
2. Numerical Model
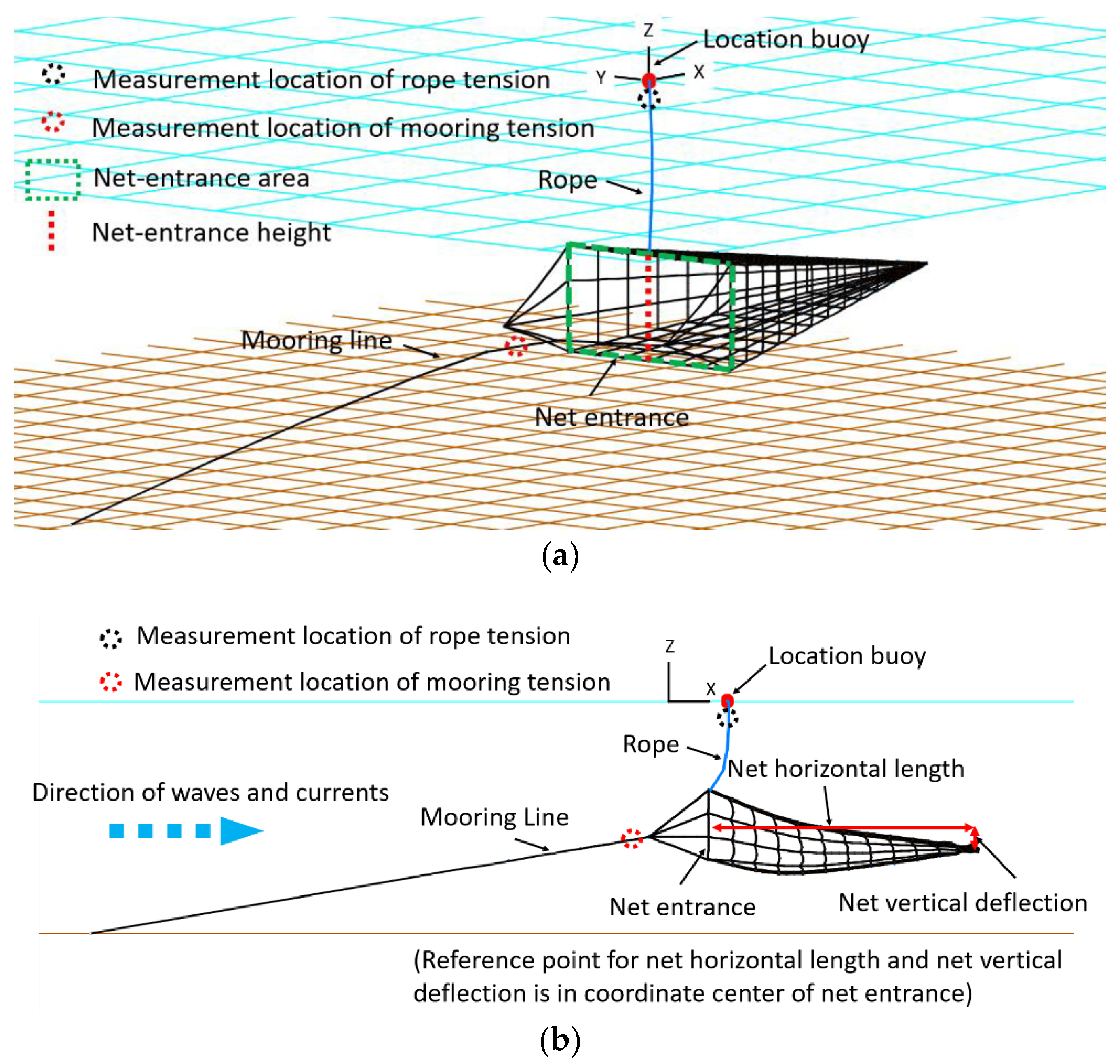
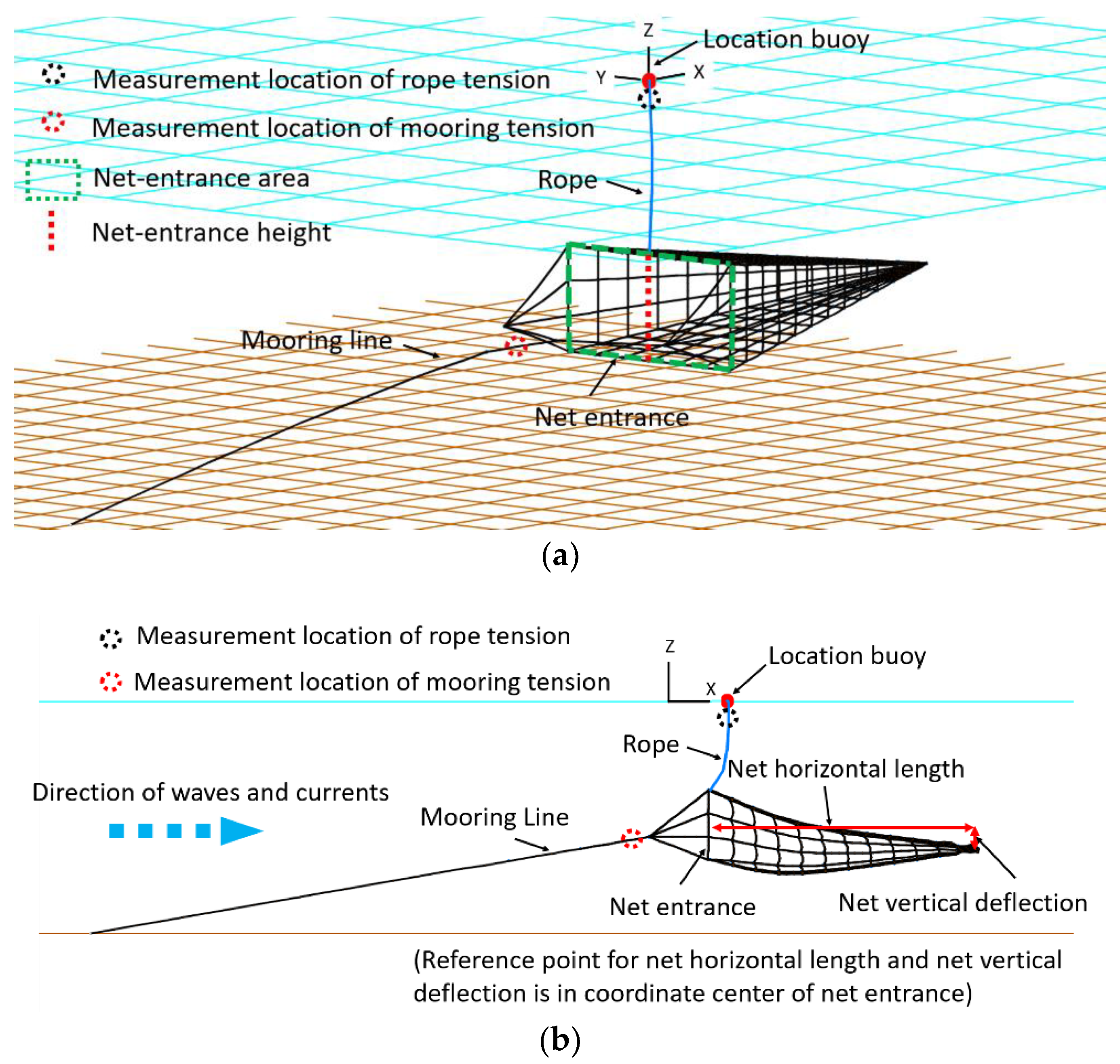
2.1. Configuration of Stow Net
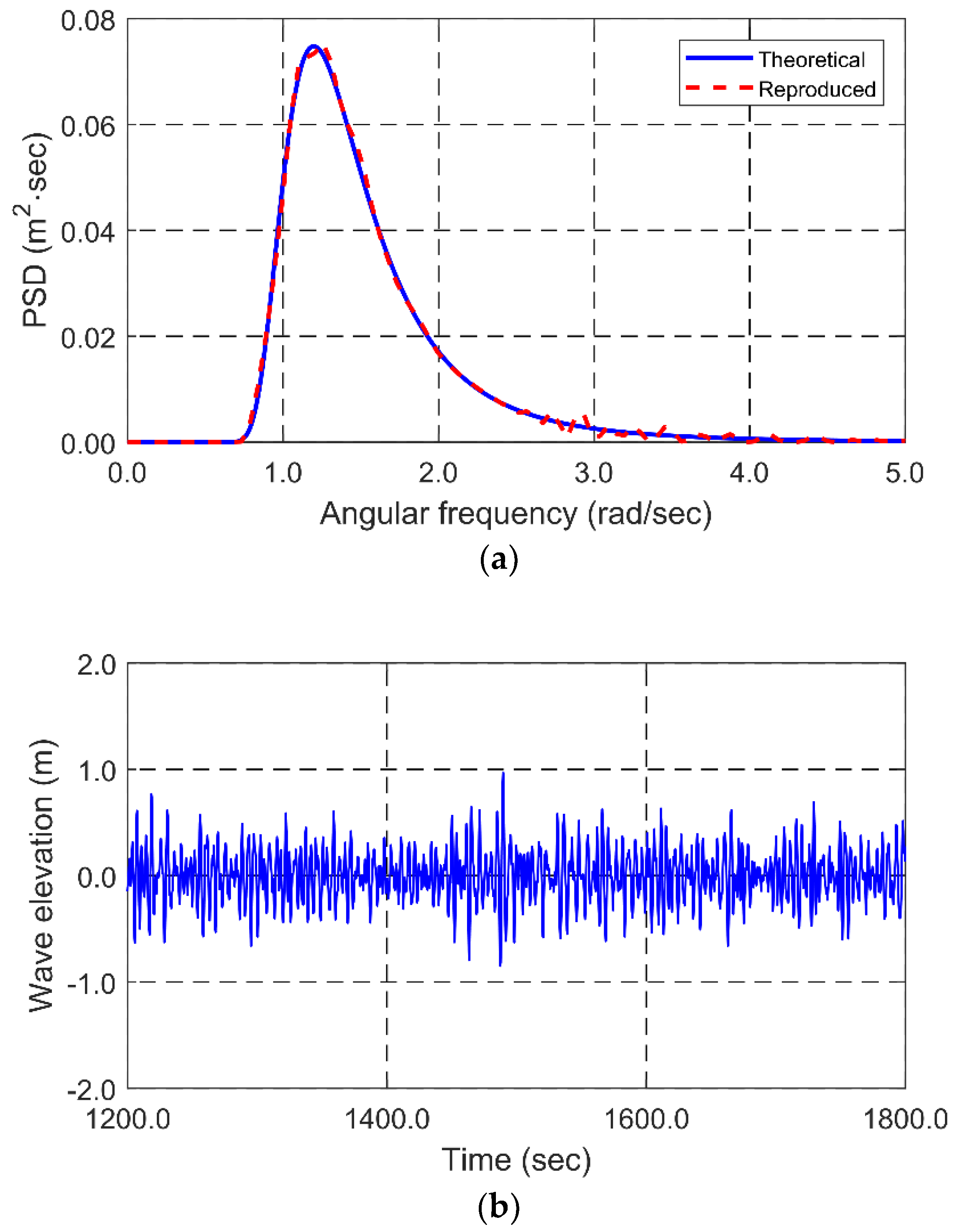
2.2. Time-Domain Numerical Simulation
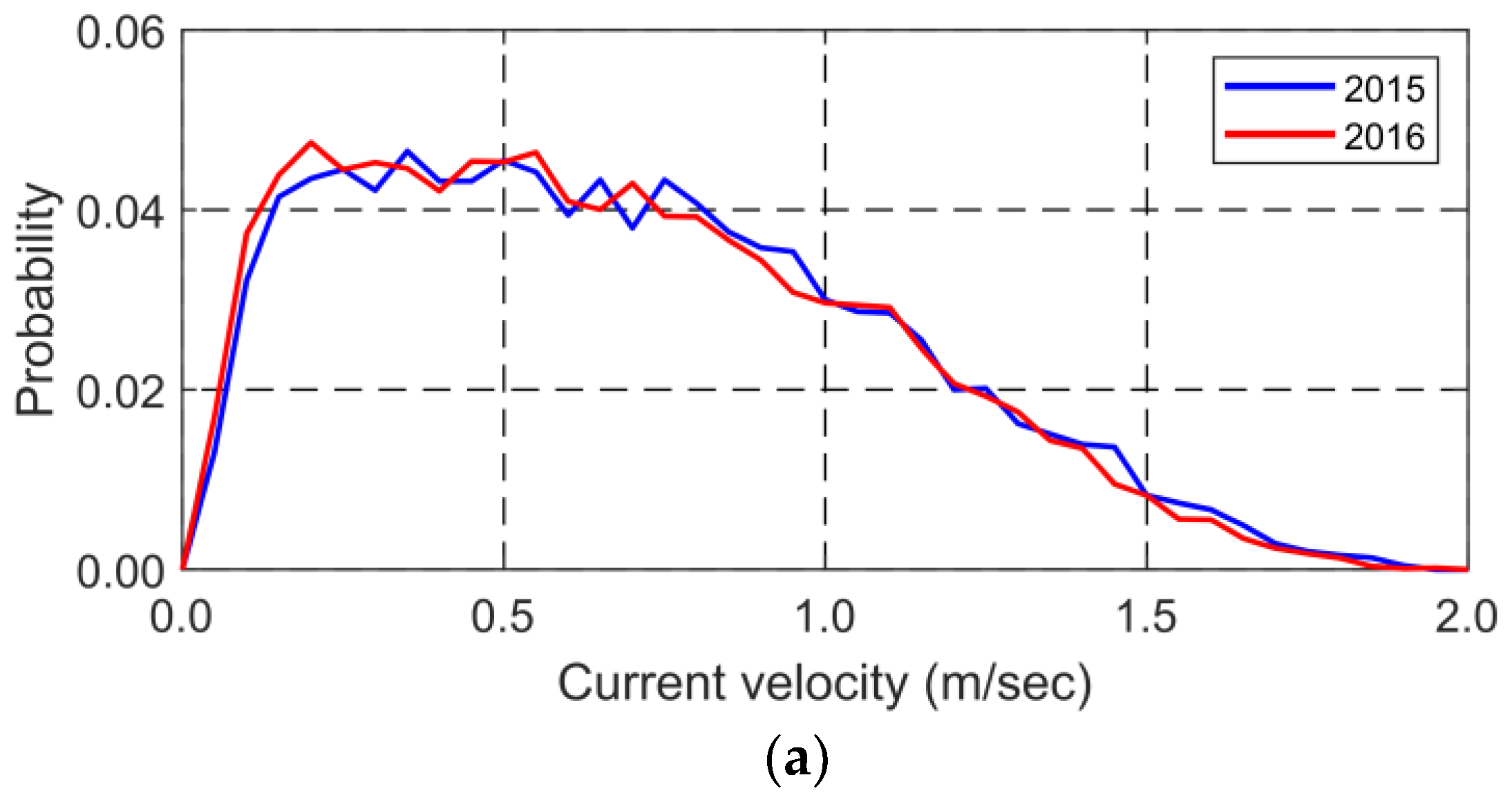
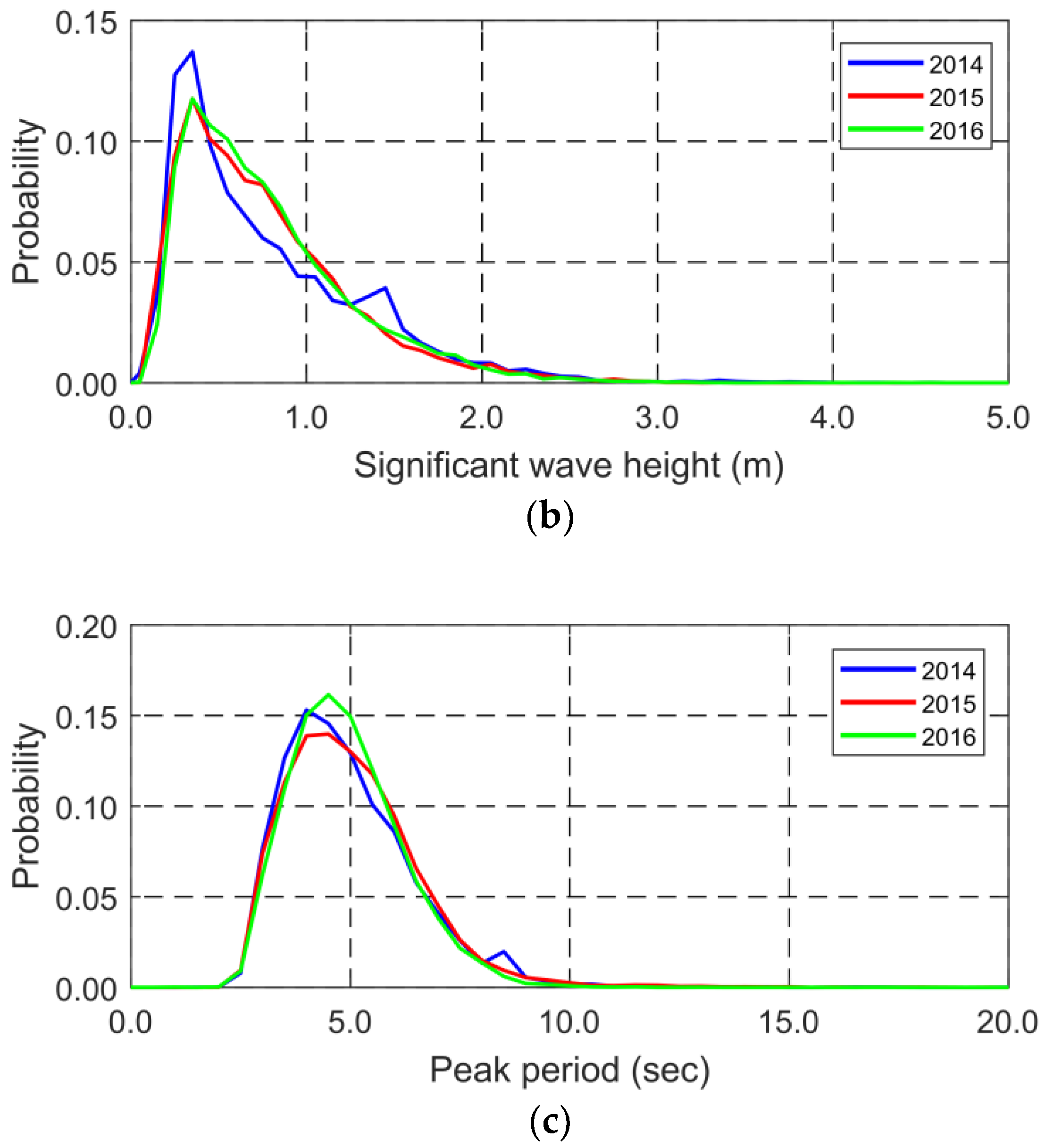
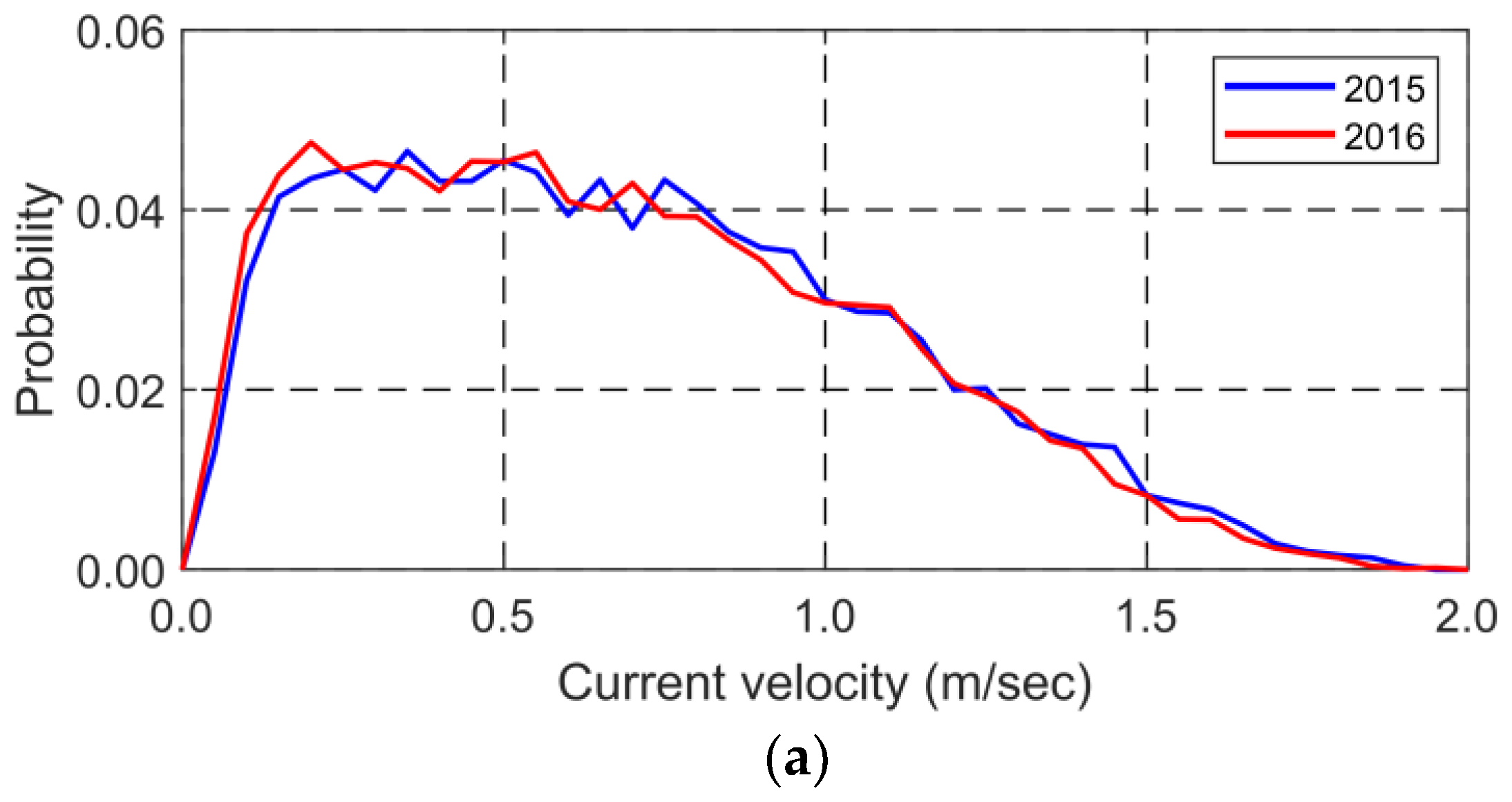
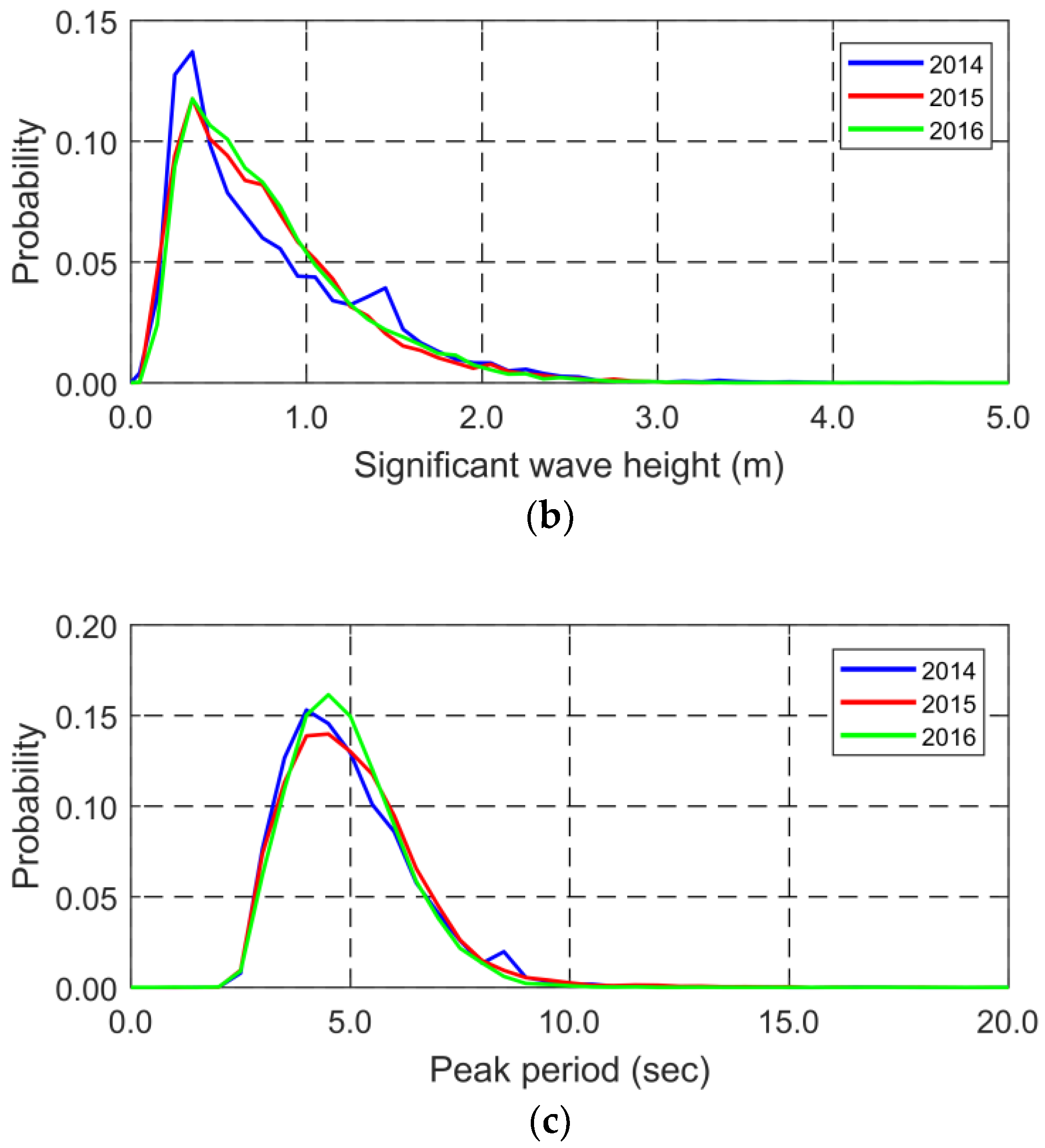
2.3. Environmental Conditions
3. Numerical Results: Performance Evaluation of the Stow Net
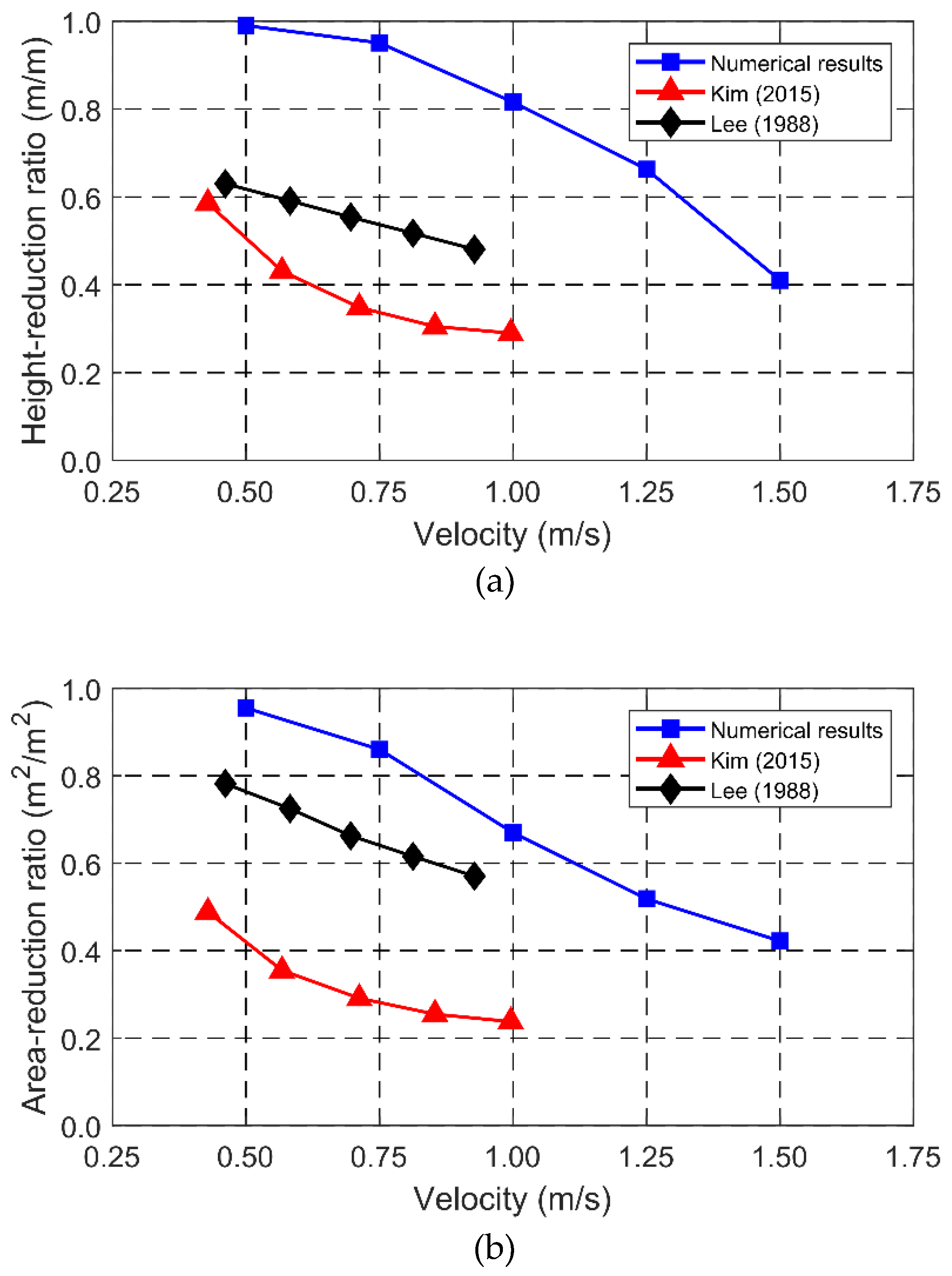
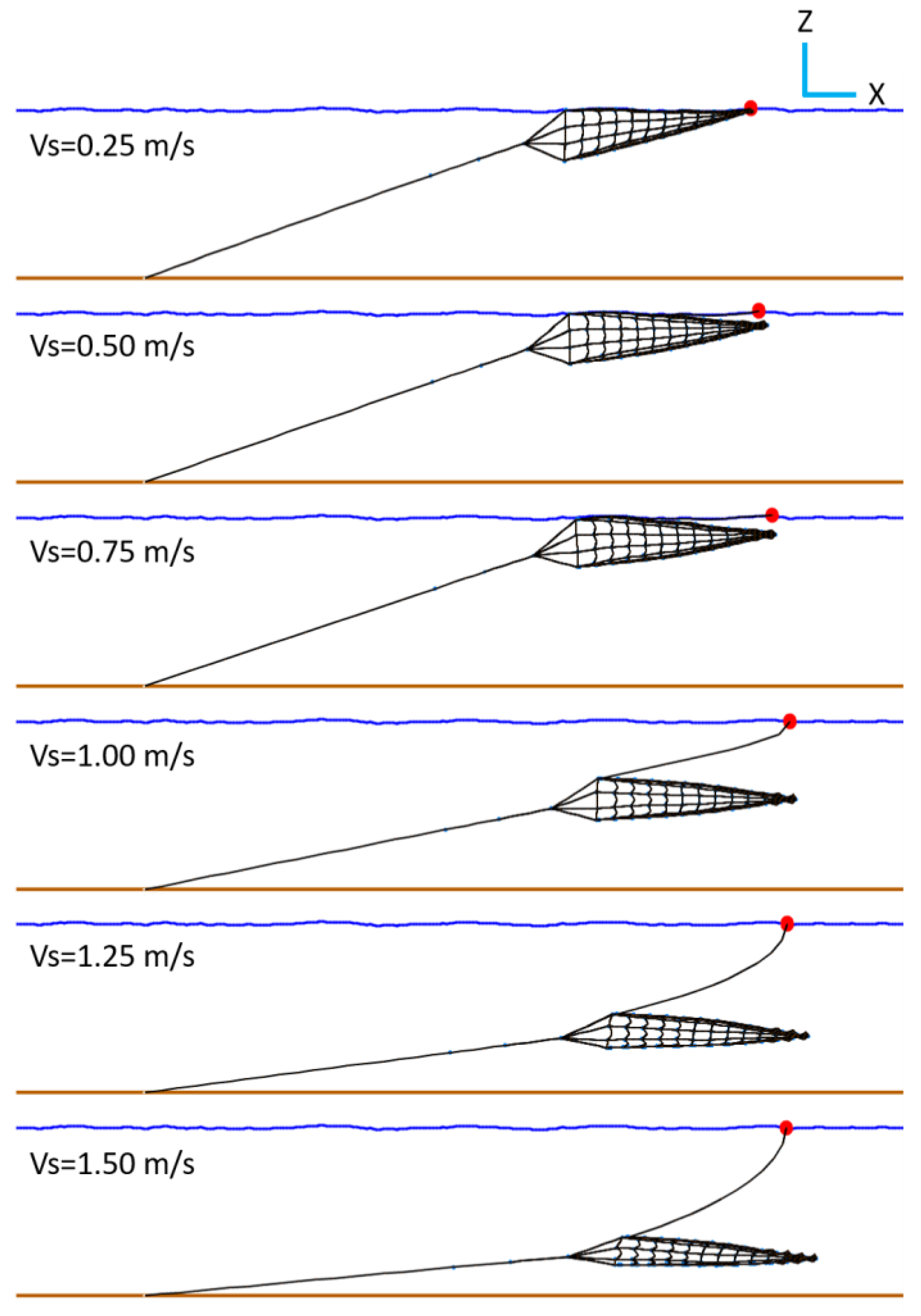
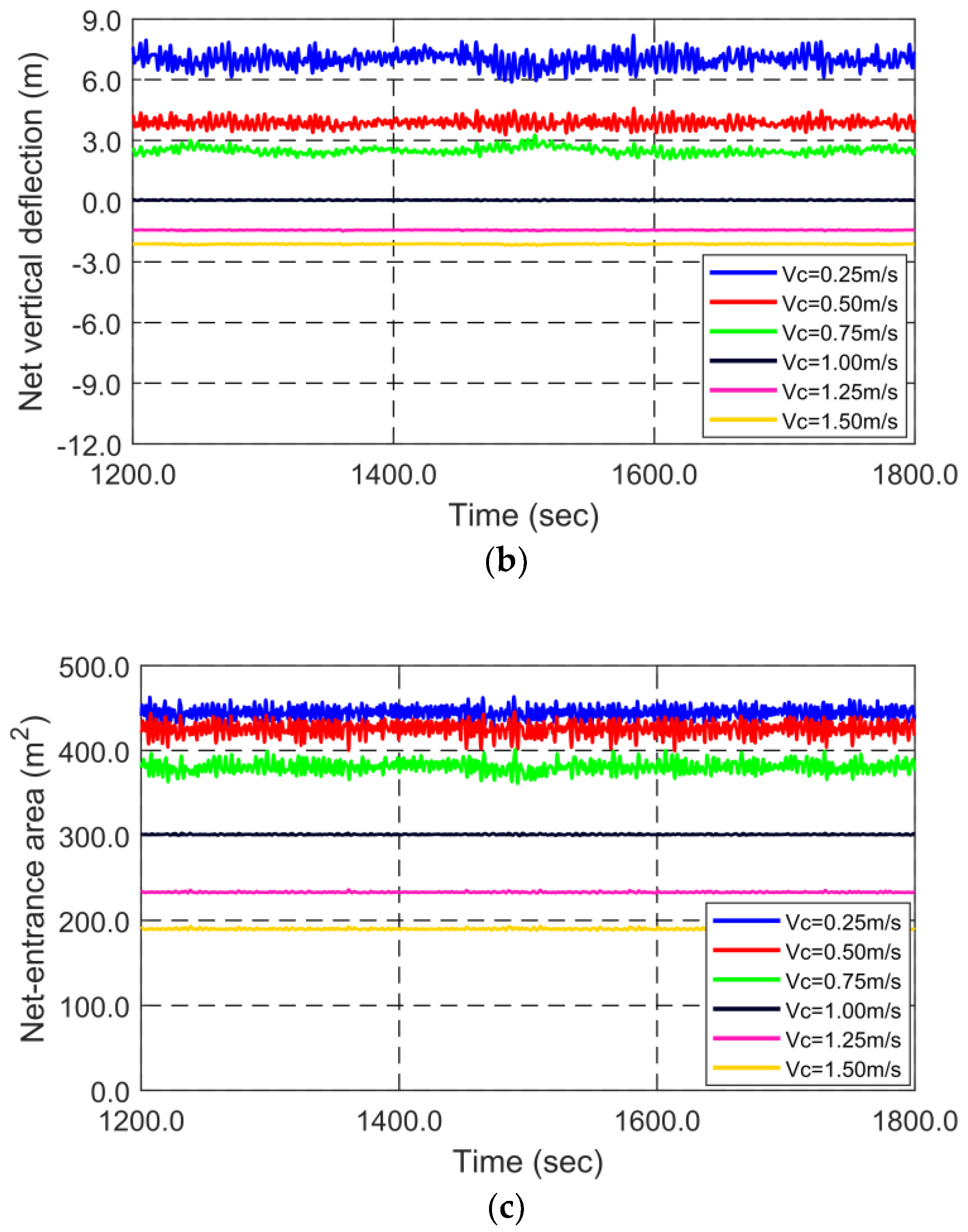
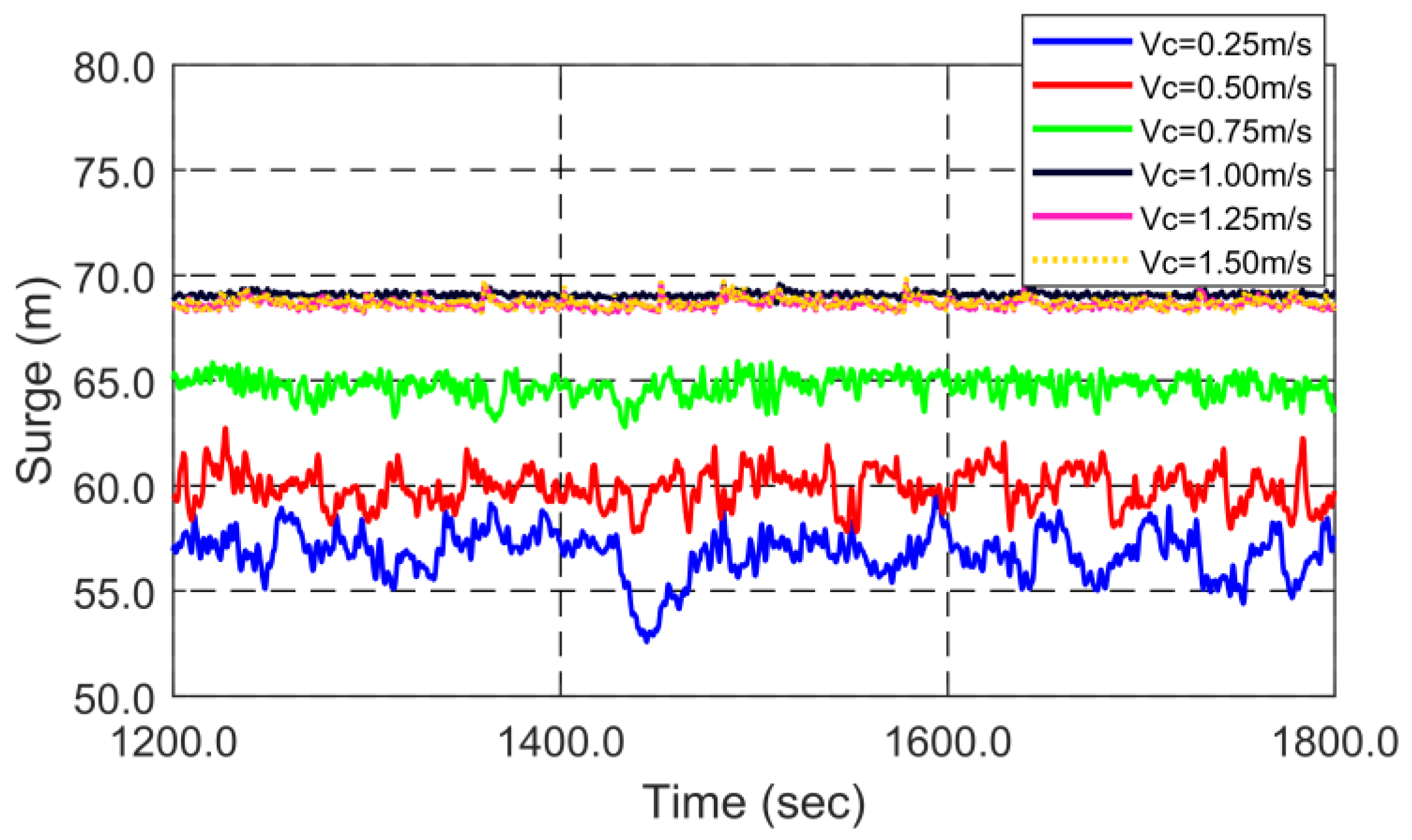
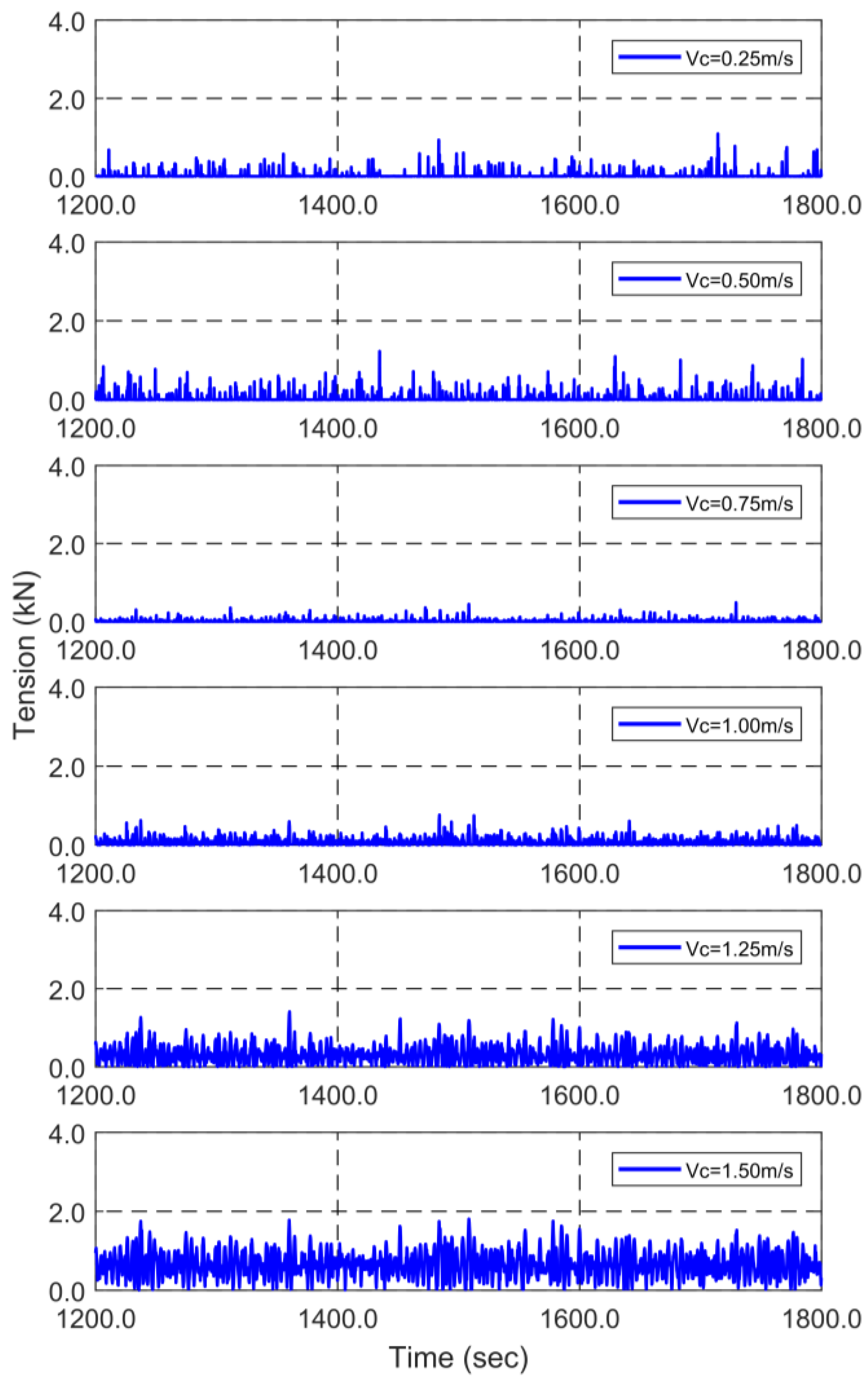
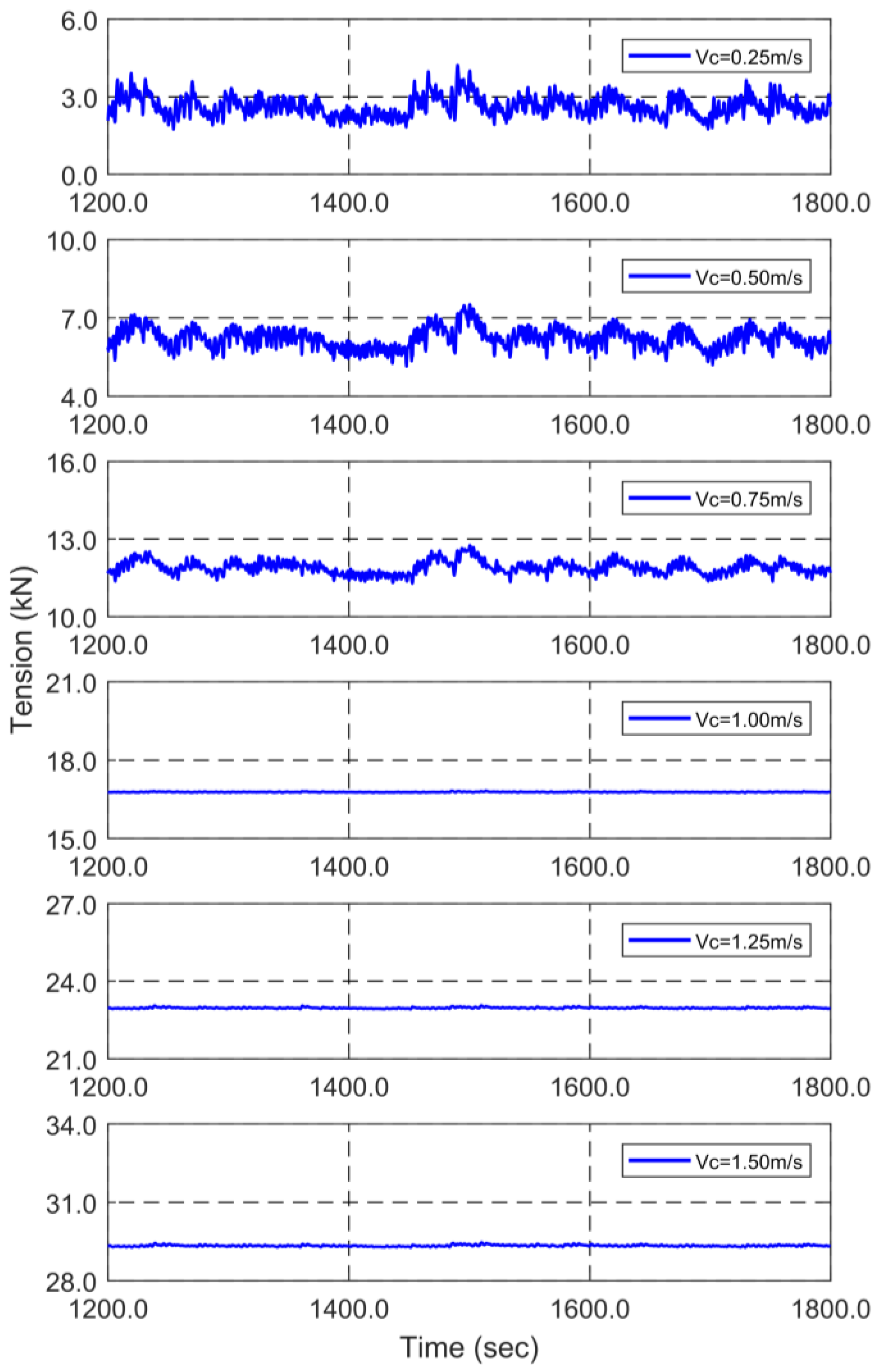
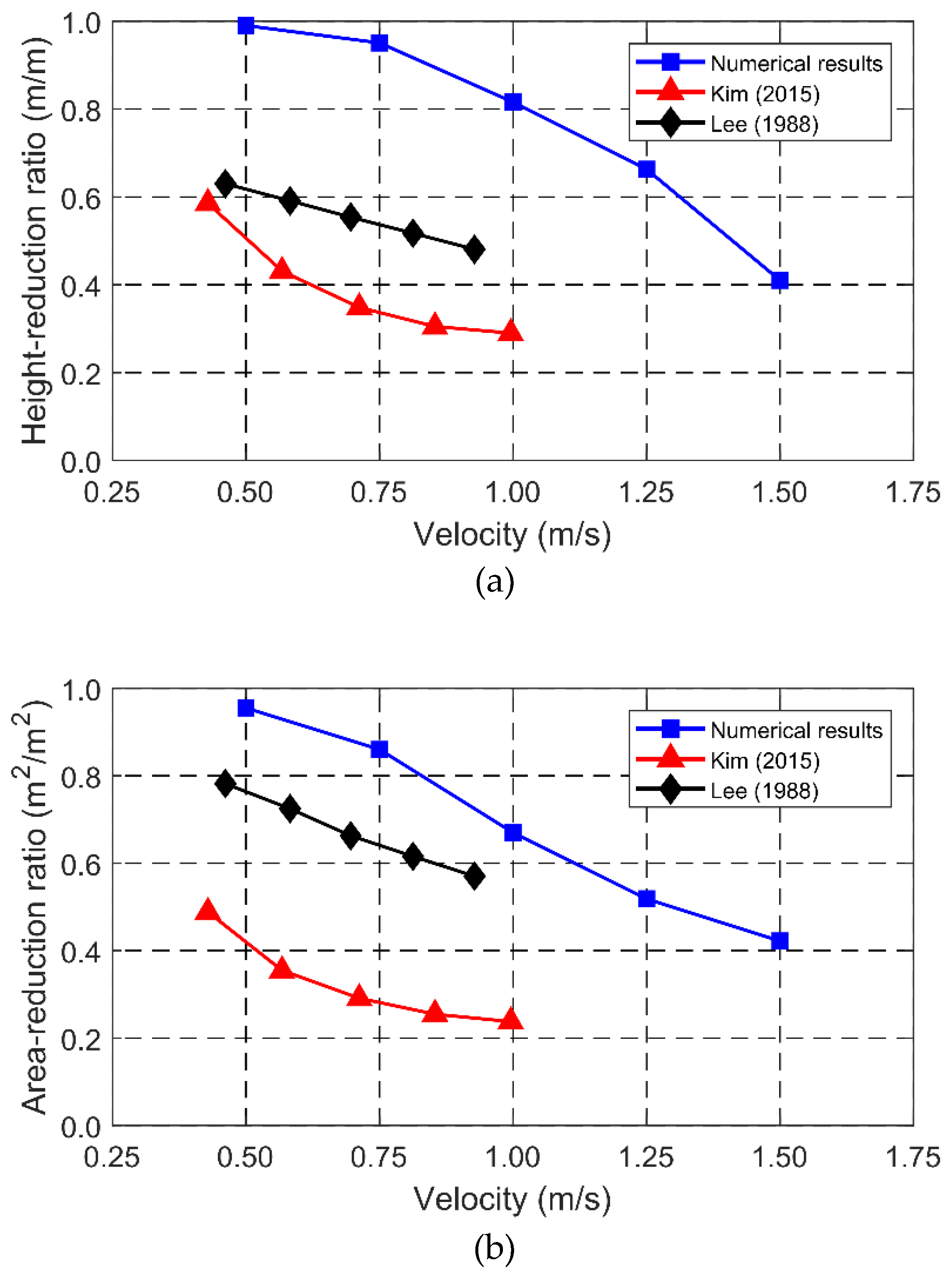
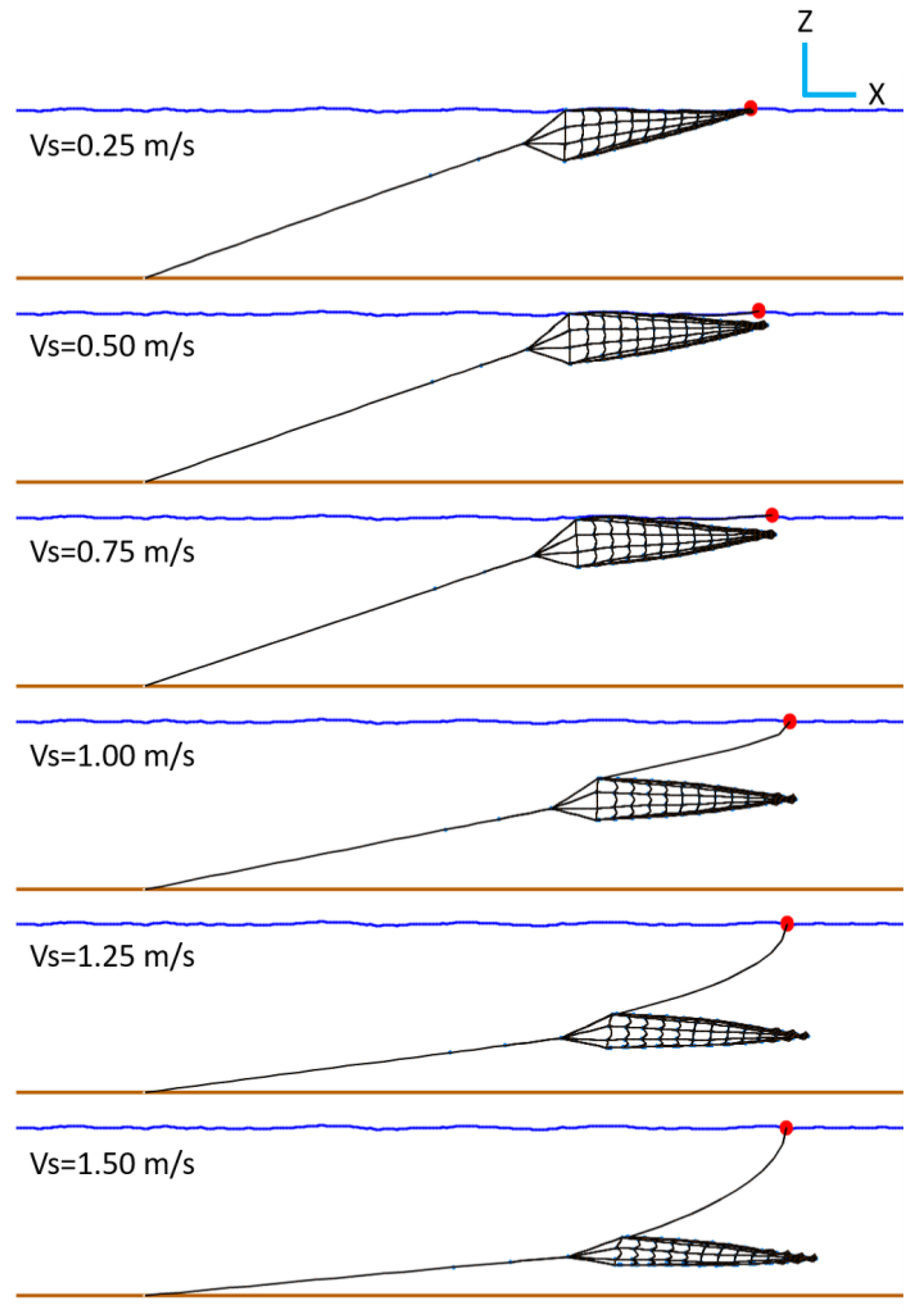
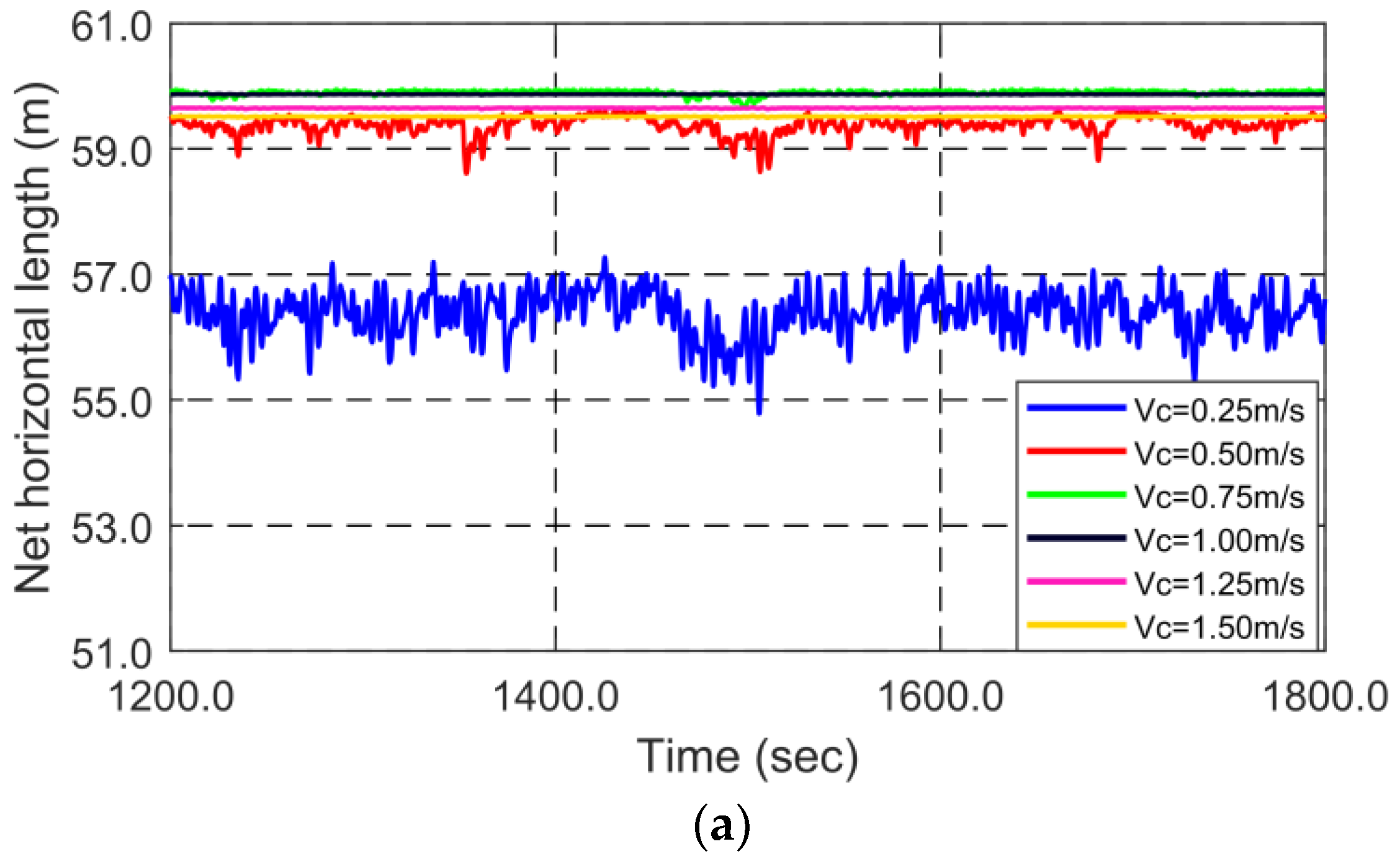
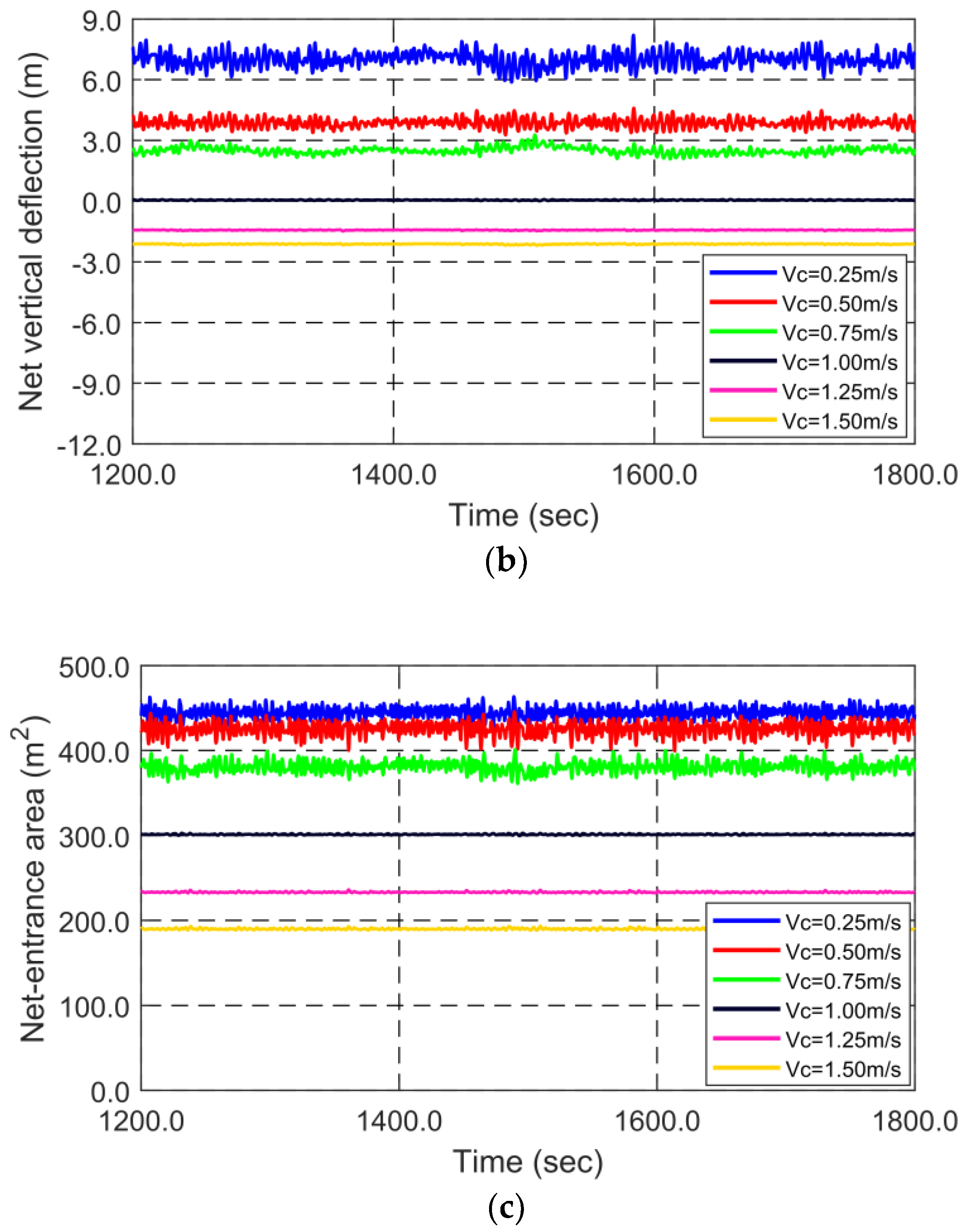
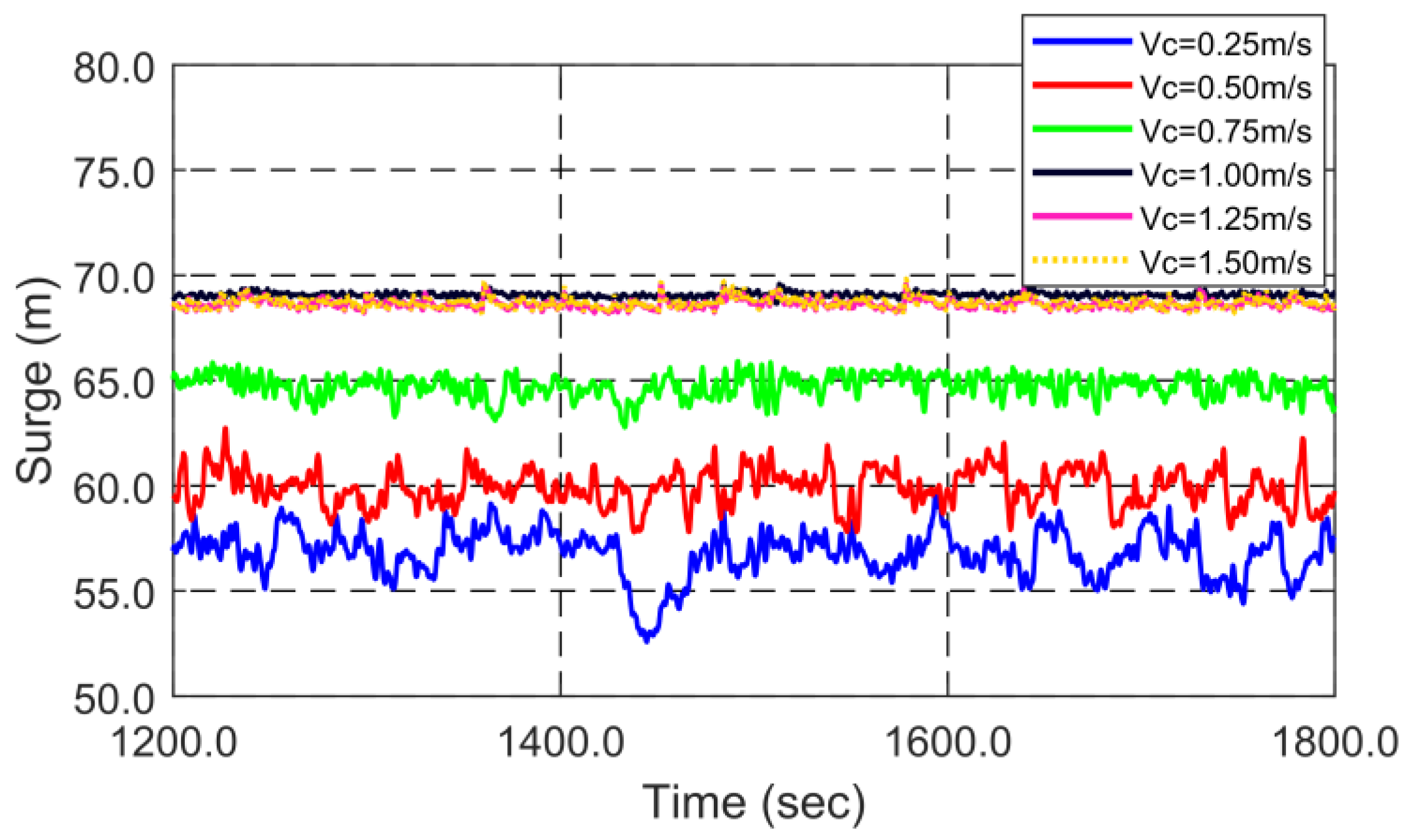
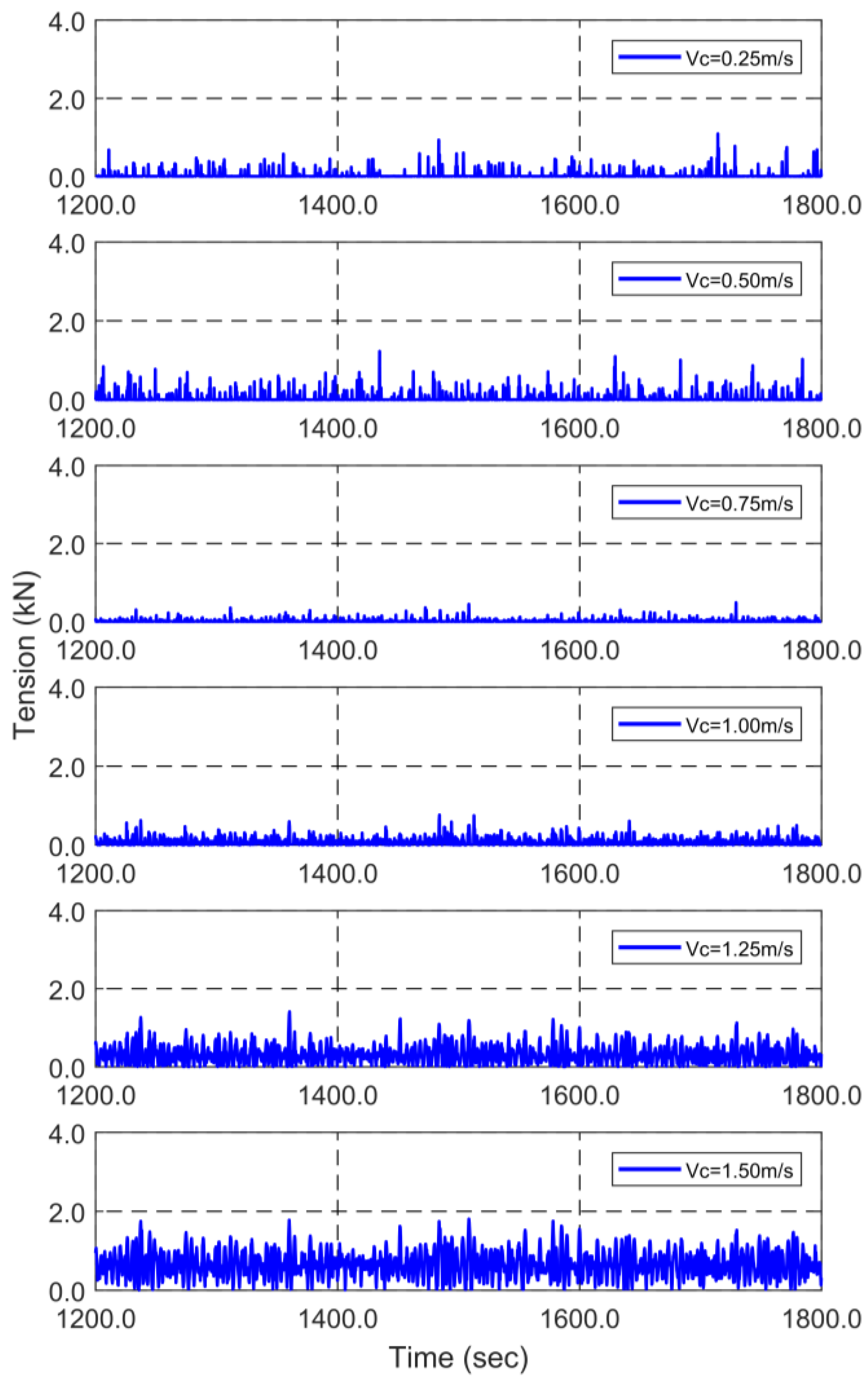
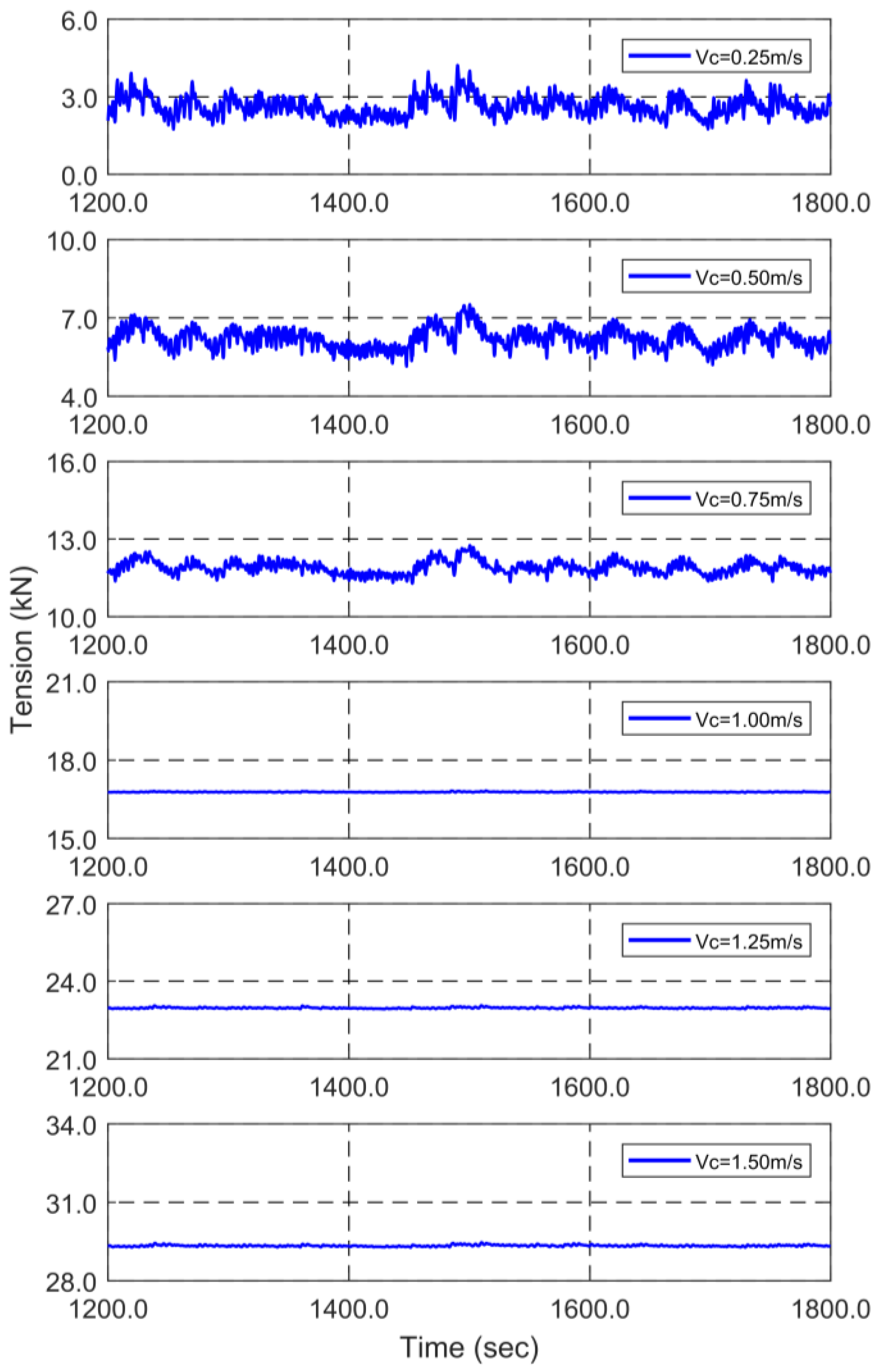
3.1. Effects of Current Velocities
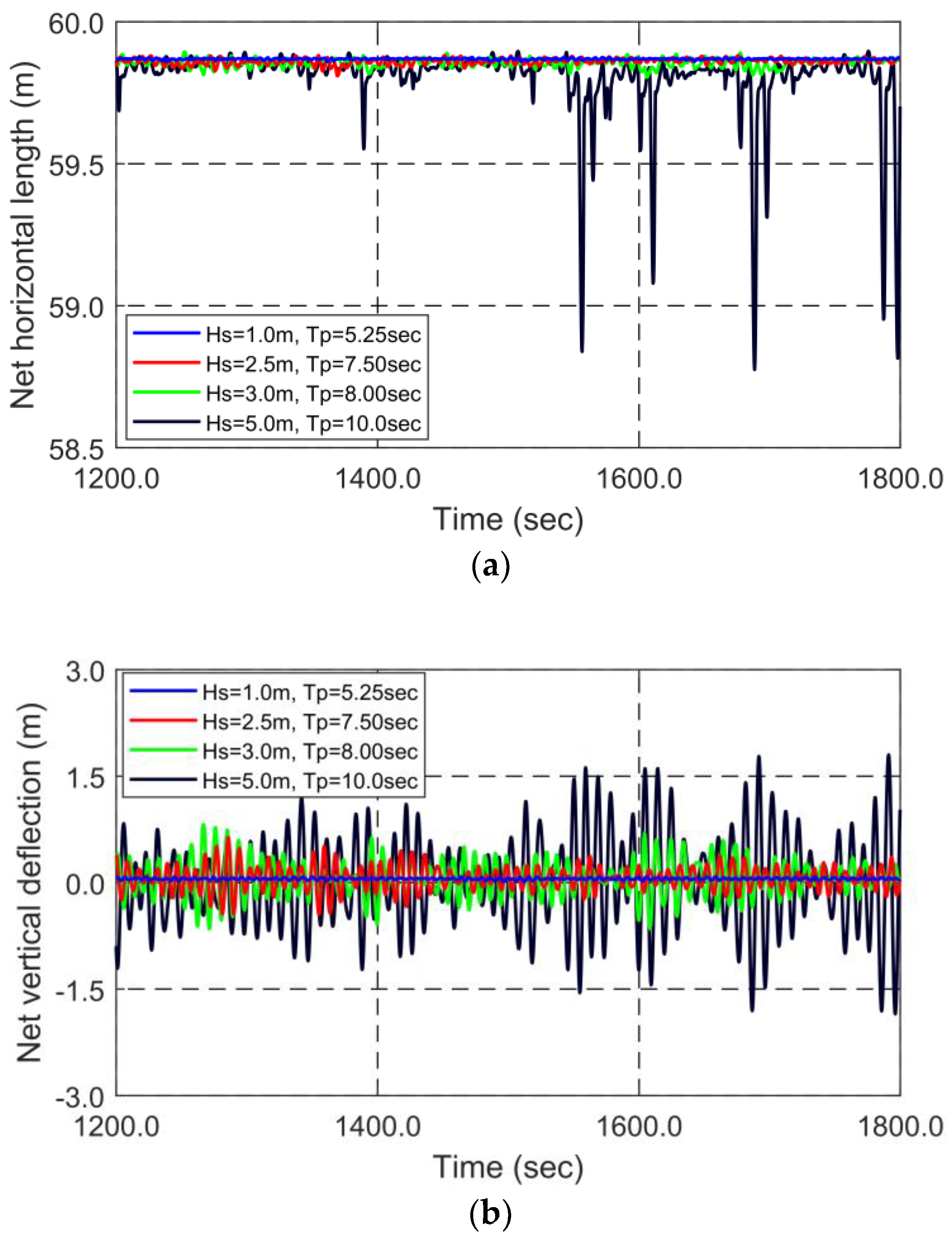
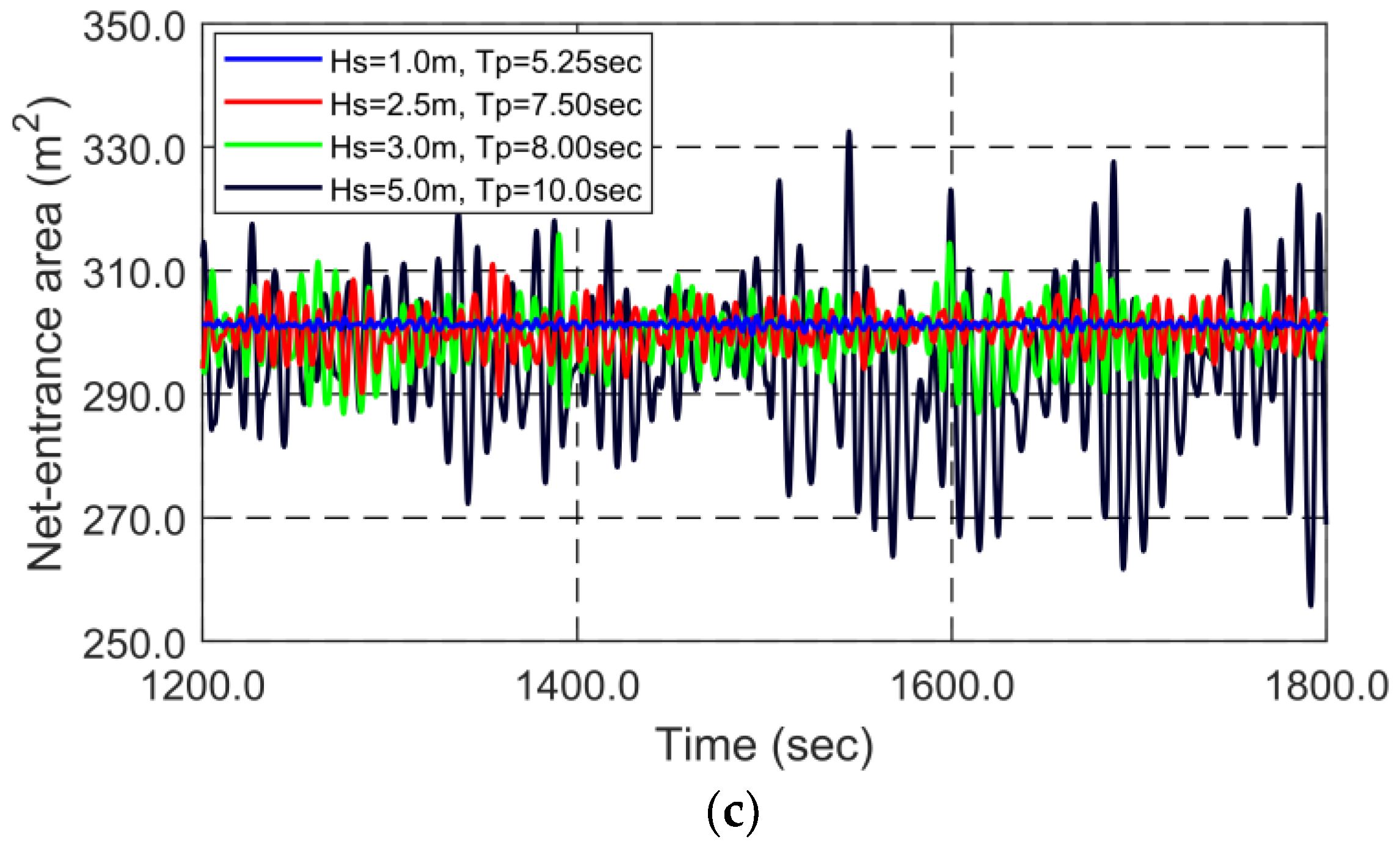
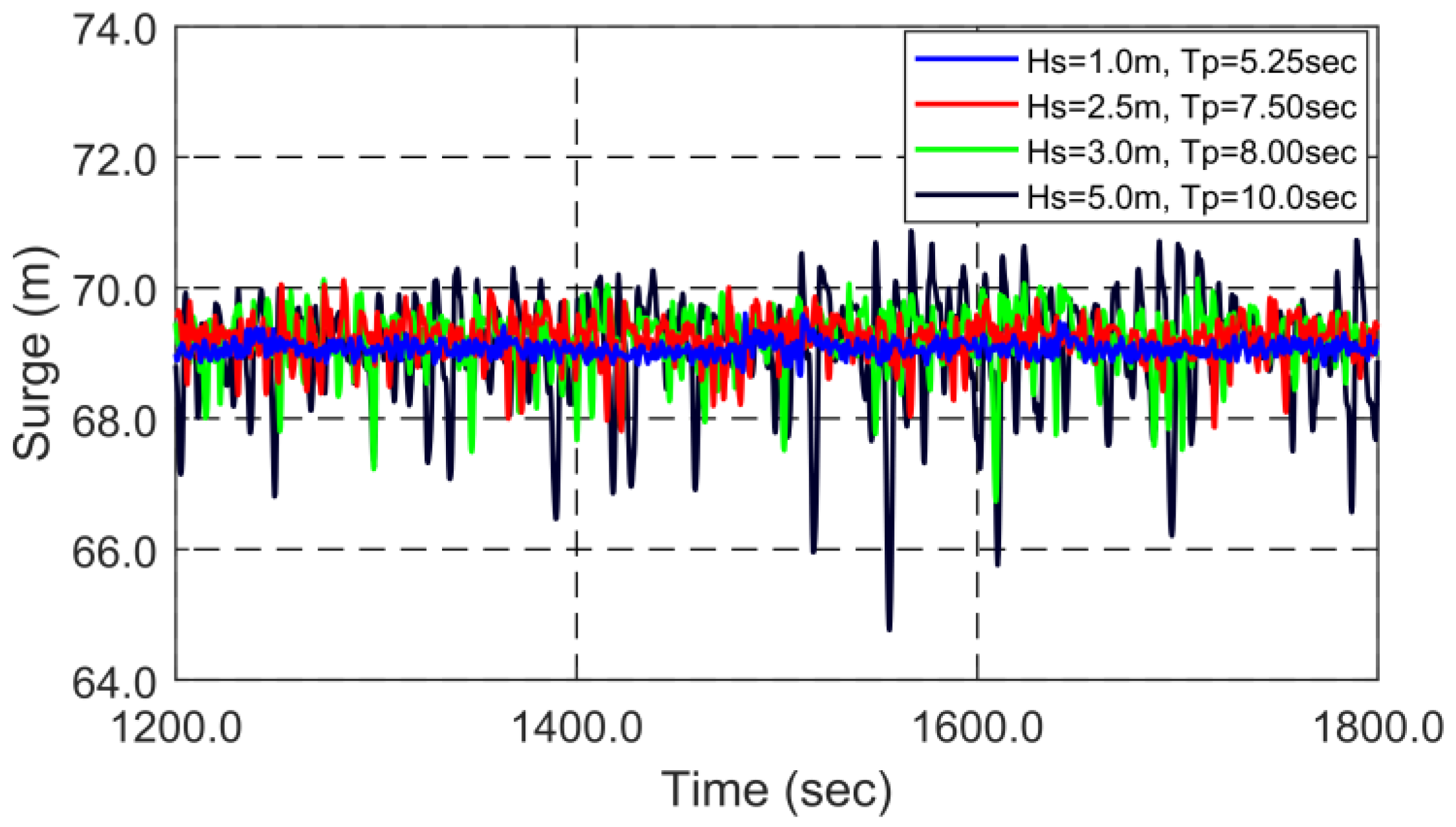
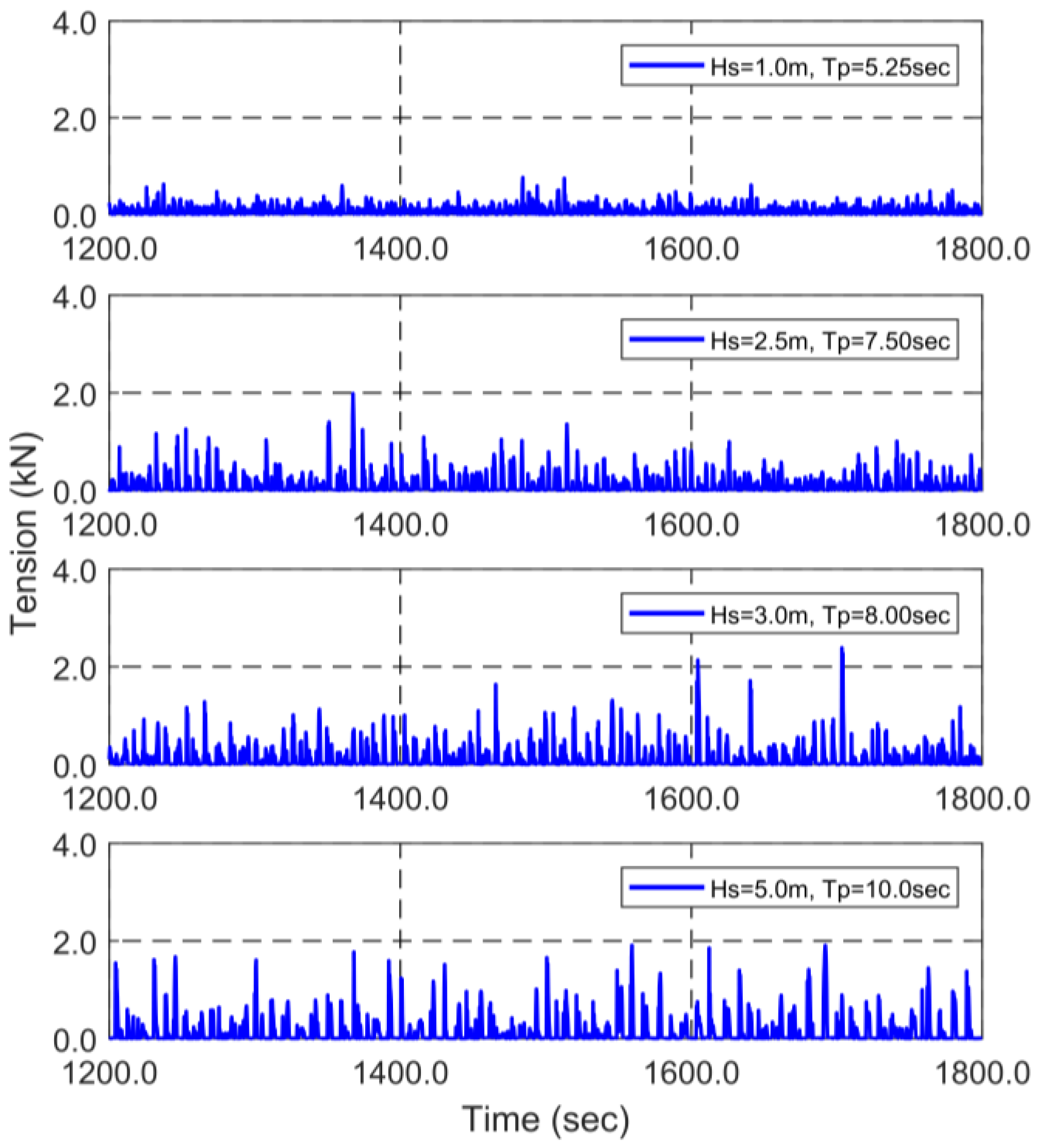
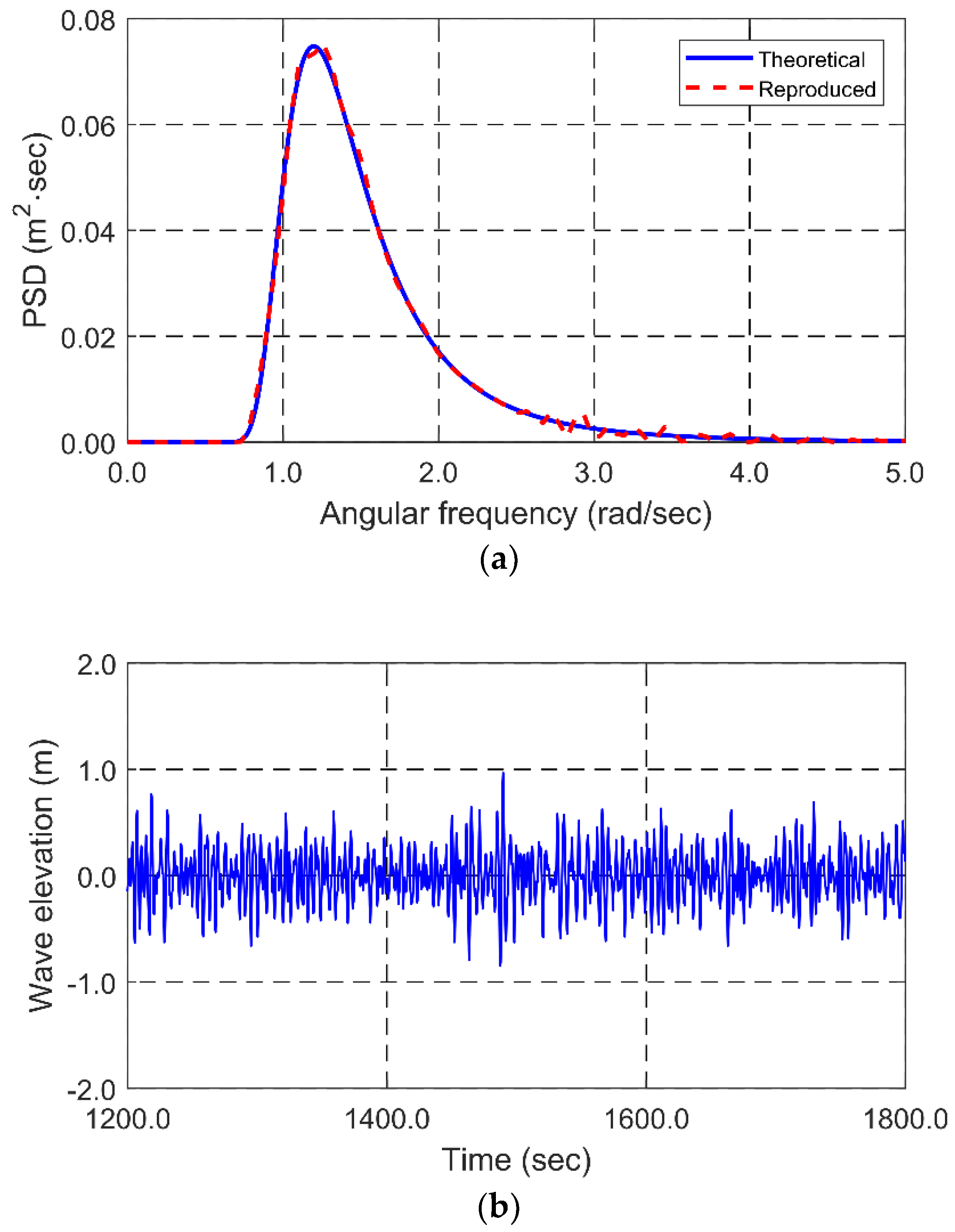
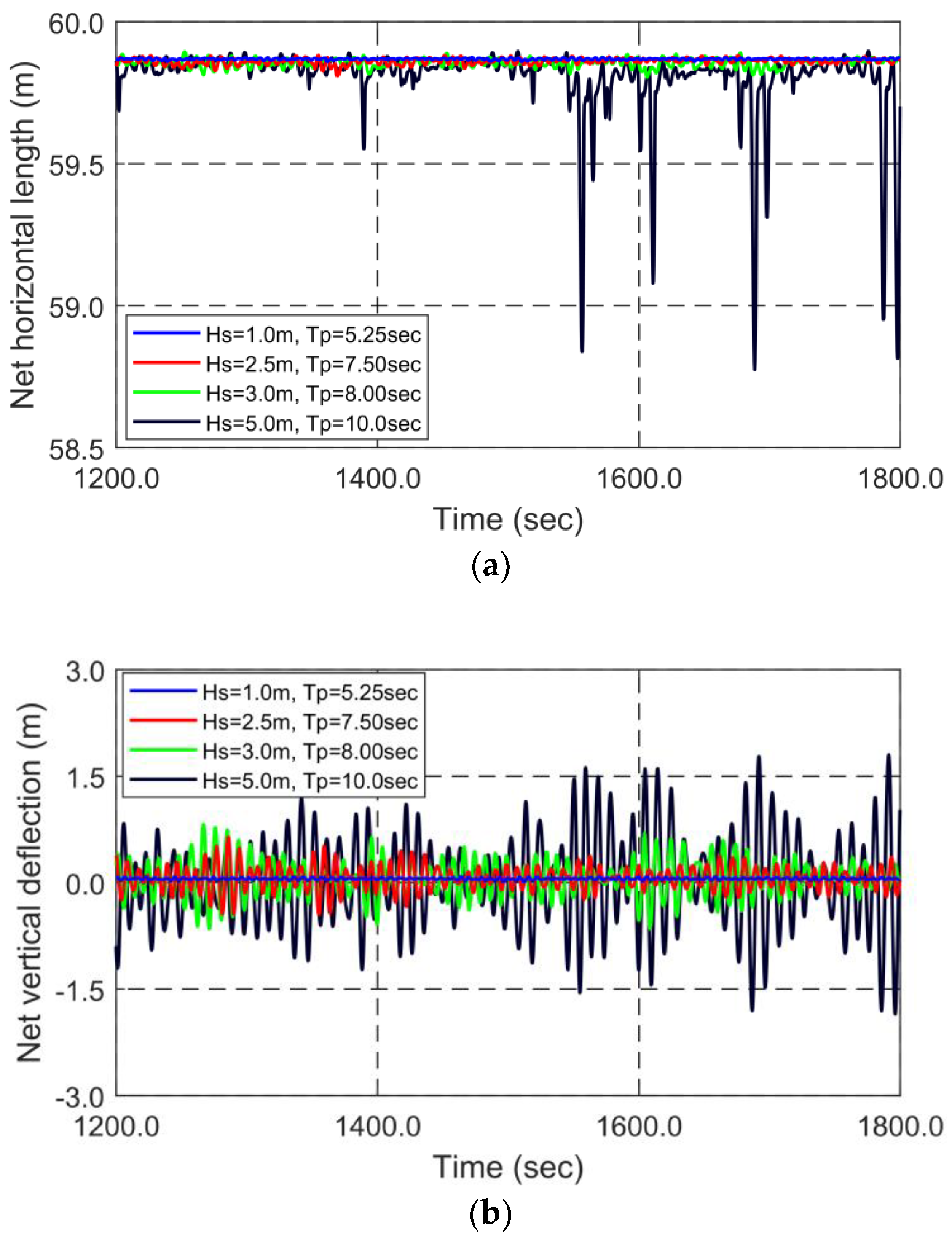
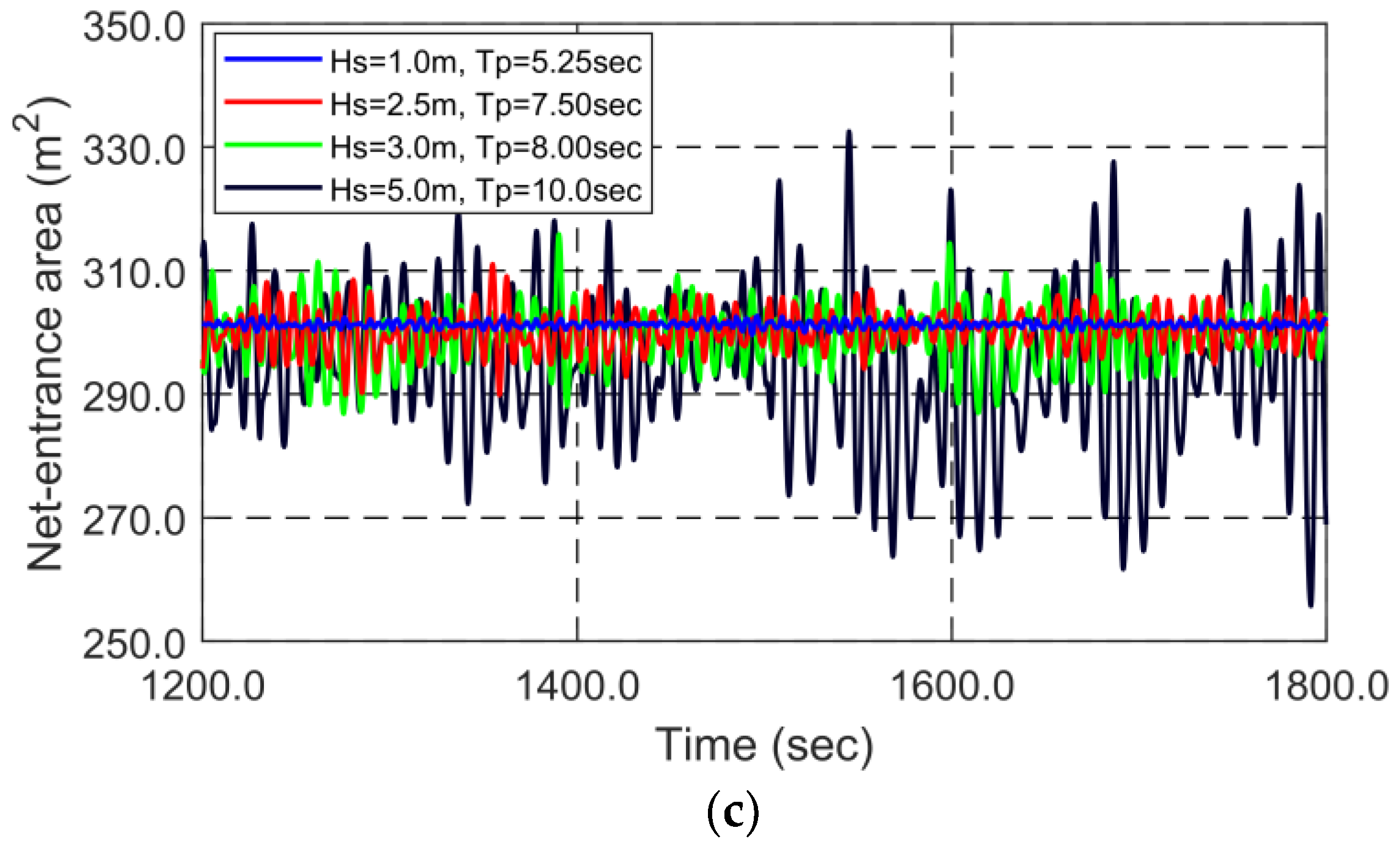
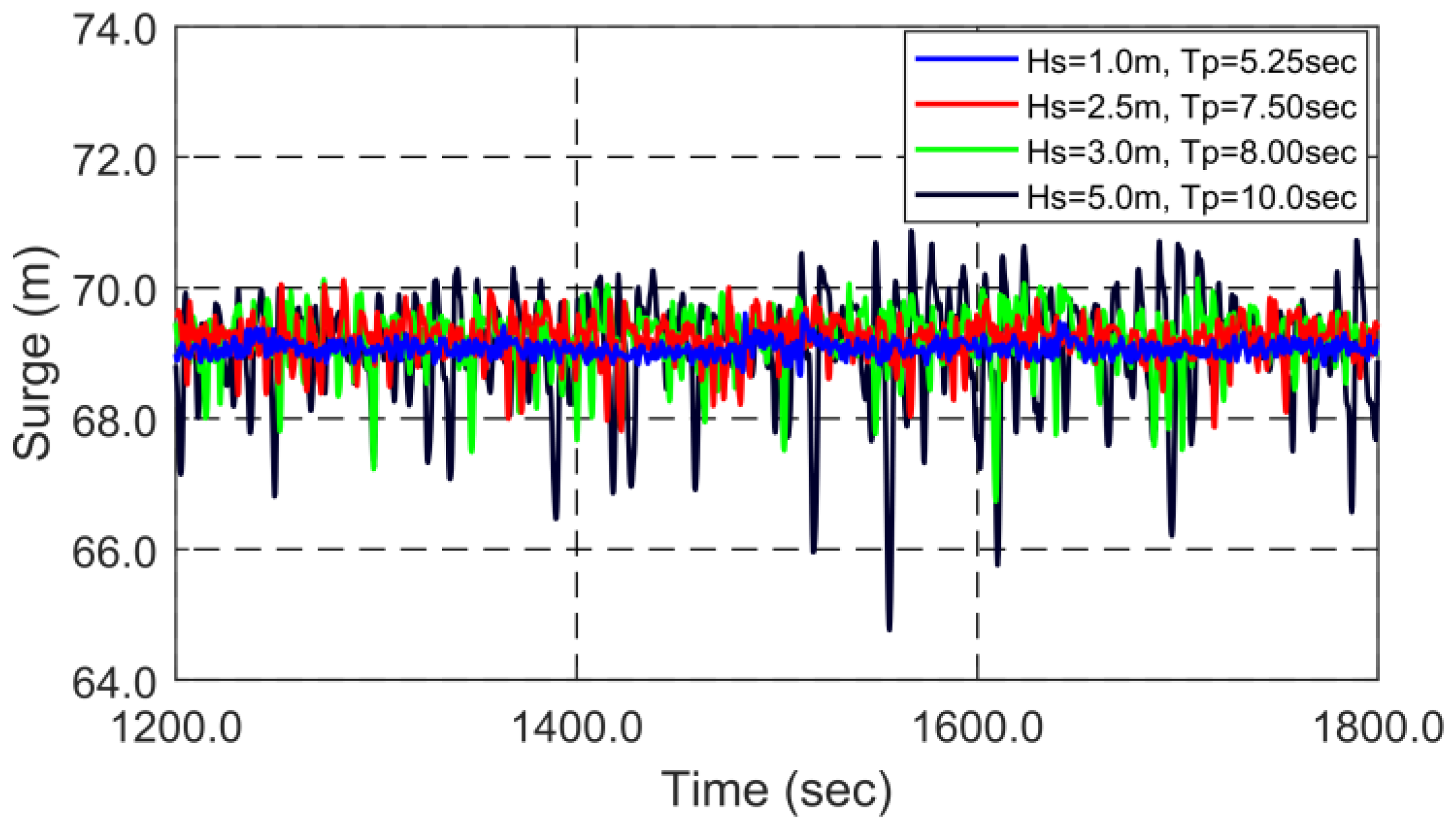
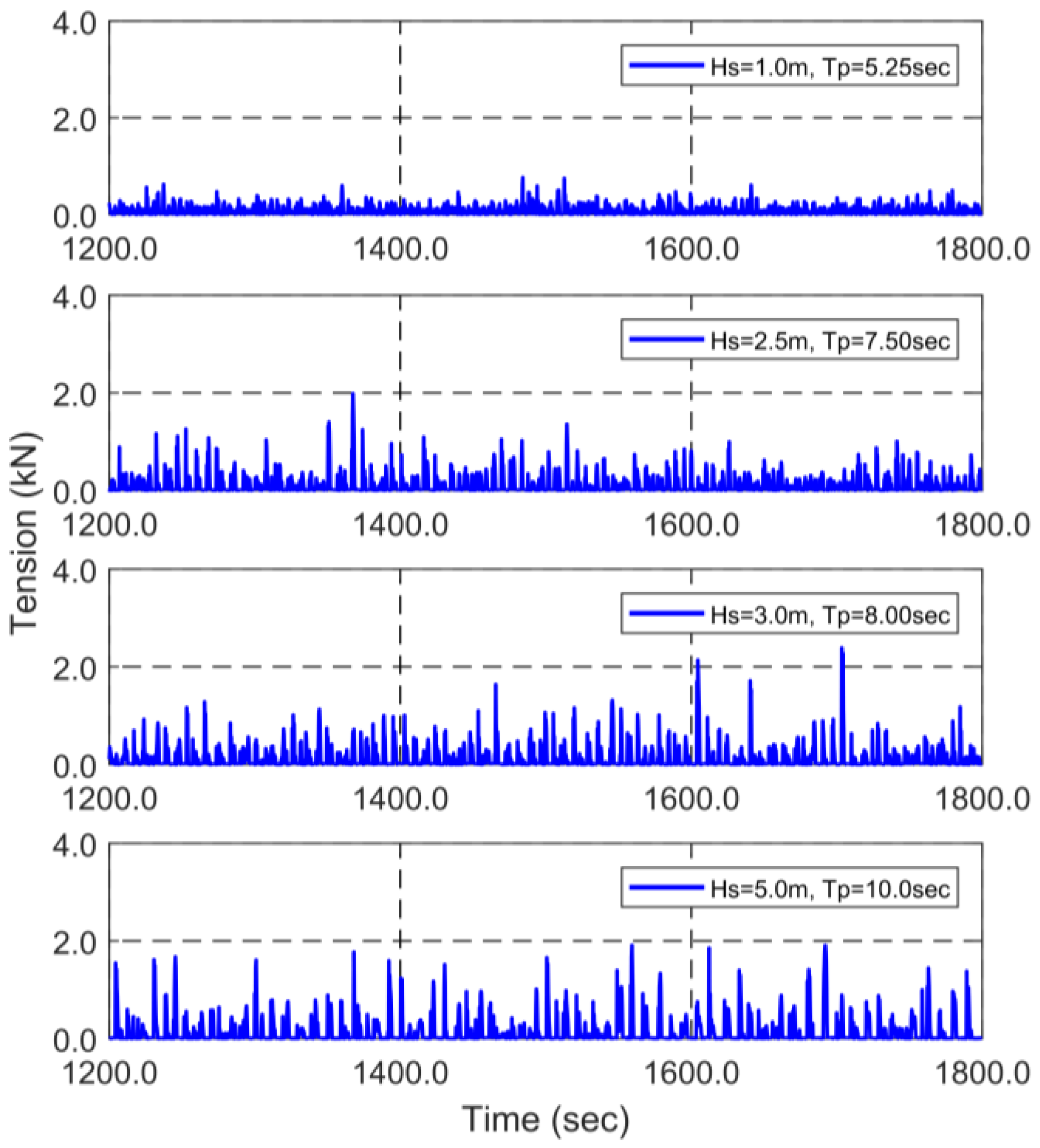
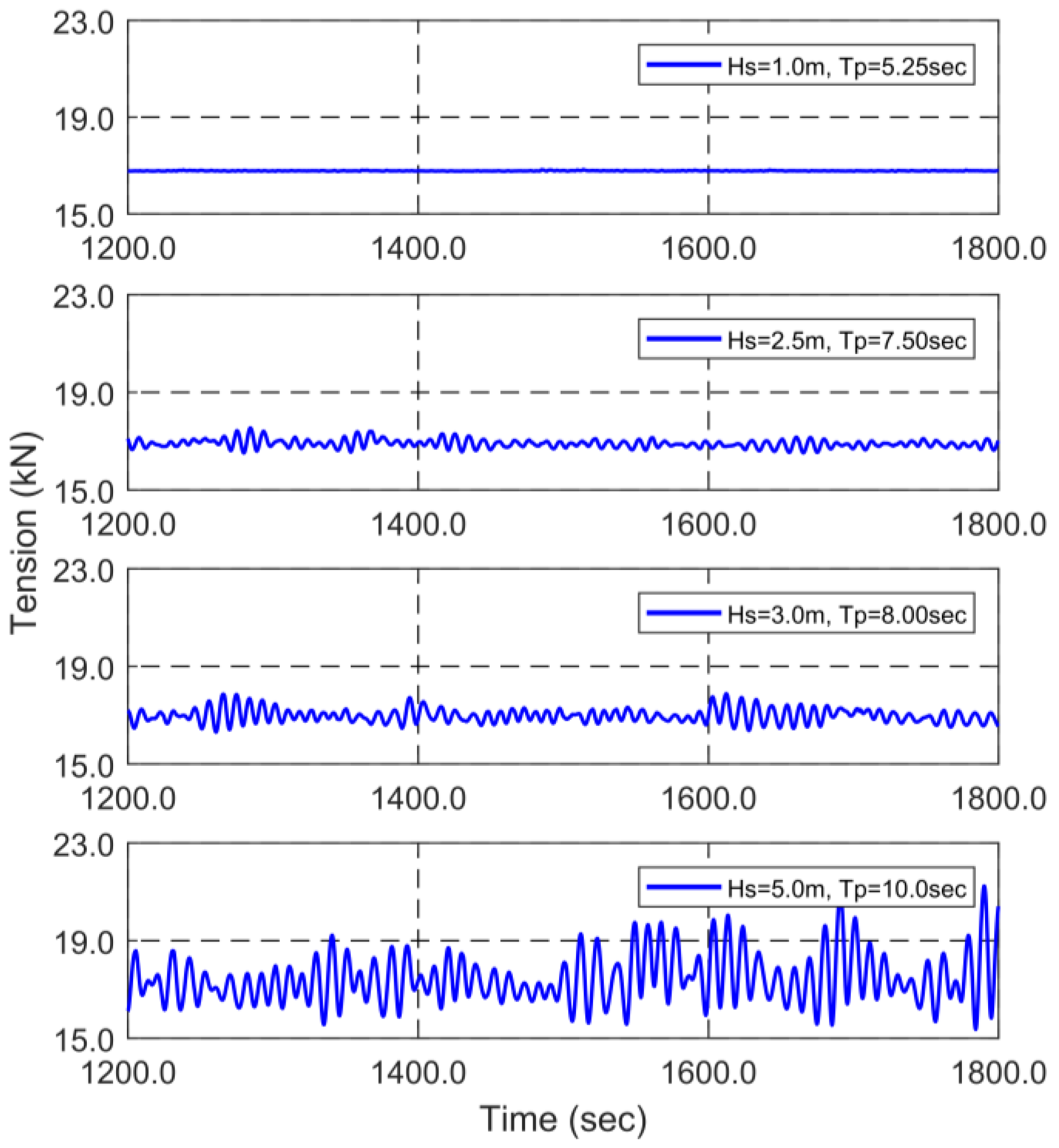
3.2. Effects of Wave Excitations
4. Feasibility of Monitoring-Sensor Technology
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Page, B.; McKenzie, J.; McIntosh, R.; Baylis, A.; Morrissey, A.; Calvert, N.; Haase, T.; Berris, M.; Dowie, D.; Shaughnessy, P.D. Entanglement of australian sea lions and new zealand fur seals in lost fishing gear and other marine debris before and after government and industry attempts to reduce the problem. Mar. Pollut. Bull. 2004, 49, 33–42. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.-N.; An, H.-C. A Study for Systematic Management of Coastal or Offshore Fishery; Korea Fisheries Association & National Fisheries Research and Development Institute: Busan, Korea, 2007; pp. 1–334.
- Jin, C.; Choi, J.; Kim, M.; Kim, K. Dynamic responses of a stow net using measured environmental data in the southwest coast of Korea. In Proceedings of the Fall Conference of the Korean Society of Ocean Engineers, Geoje, Korea, 19–20 October 2017; pp. 262–265. [Google Scholar]
- Kim, J.-K.; Yoon, G.-D. A study on the design of the stern stow net. J. Korean Soc. Fish. Technol. 1999, 35, 343–352. [Google Scholar] [CrossRef]
- Kristiansen, T.; Faltinsen, O.M. Modelling of current loads on aquaculture net cages. J. Fluids Struct. 2012, 34, 218–235. [Google Scholar] [CrossRef]
- Lee, C.-W.; Kim, Y.-B.; Lee, G.-H.; Choe, M.-Y.; Lee, M.-K.; Koo, K.-Y. Dynamic simulation of a fish cage system subjected to currents and waves. Ocean Eng. 2008, 35, 1521–1532. [Google Scholar] [CrossRef]
- Huang, C.-C.; Tang, H.-J.; Liu, J.-Y. Effects of waves and currents on gravity-type cages in the open sea. Aquacult. Eng. 2008, 38, 105–116. [Google Scholar] [CrossRef]
- Huang, C.-C.; Pan, J.-Y. Mooring line fatigue: A risk analysis for an spm cage system. Aquacult. Eng. 2010, 42, 8–16. [Google Scholar] [CrossRef]
- Zhao, Y.-P.; Li, Y.-C.; Dong, G.-H.; Teng, B.; Gui, F.-K. Numerical simulation of hydrodynamic behaviors of gravity cage in current and waves. Int. J. Offshore Polar Eng. 2009, 19, 97–107. [Google Scholar]
- Zhao, Y.-P.; Gui, F.-K.; Xu, T.-J.; Chen, X.-F.; Cui, Y. Numerical analysis of dynamic behavior of a box-shaped net cage in pure waves and current. Appl. Ocean Res. 2013, 39, 158–167. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M. Numerical simulation of fish nets in currents using a morison force model. Ocean Syst. Eng. 2017, 7, 143–155. [Google Scholar]
- Cifuentes, C.; Kim, M. Hydrodynamic response of a cage system under waves and currents using a morison-force model. Ocean Eng. 2017, 141, 283–294. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, M. Dynamic analysis for the global performance of an spm-feeder-cage system under waves and currents. China Ocean Eng. 2015, 29, 415–430. [Google Scholar] [CrossRef]
- Chen, H.; Christensen, E.D. Simulating the hydrodynamic response of a floater–net system in current and waves. J. Fluids Struct. 2018, 79, 50–75. [Google Scholar] [CrossRef]
- Ko, K.S.; Kim, Y.H. Model experiment of stow net. Korean J. Fish. Aquat. Sci. 1979, 12, 201–207. [Google Scholar]
- Sun, M.C.; Zhang, J.; Xu, L.X. Size selectivity of diamond and square mesh codends for hairfin anchovy setipinna taty in chinese stow net fisheries. Fish. Sci. 2006, 72, 530–539. [Google Scholar] [CrossRef]
- Cho, S.-K.; Park, C.-D.; Kim, H.-Y.; Cha, B.-J. Catches comparison according to the codend mesh size of stow net on anchor in the west sea of korea. J. Korean Soc. Fish. Technol. 2010, 46, 1–9. [Google Scholar] [CrossRef]
- Cho, S.-K.; Cha, B.-J.; Kim, H.-Y. Catches of main species and bycatch according to the codend mesh sizes of stow net on anchor in the west sea of korea. J. Korean Soc. Fish. Technol. 2011, 47, 88–98. [Google Scholar] [CrossRef]
- Kim, S.; Lee, D.; Lim, J.; Park, S. Model test on the net mouth shape of a gape net according to current speeds in jindo area, korea. J. Korean Soc. Fish. Technol. 2015, 51, 146–153. [Google Scholar] [CrossRef]
- Lee, B.-G.; Kim, J.-K.; Lee, J.-H. Study on the improvement of stow net fishing technique and the enlargement of fishing ground to the distant waters-1. Model experiment of the net. J. Korean Soc. Fish. Technol. 1988, 24, 55–64. [Google Scholar]
- Orcina. Orcaflex Manual Version 9.8a. 2015. Available online: https://www.orcina.com/Support/OrcaFlex/9.8/index.php (accessed on 1 September 2018).
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: London, UK, 1993. [Google Scholar]
- DeCew, J.; Tsukrov, I.; Risso, A.; Swift, M.; Celikkol, B. Modeling of dynamic behavior of a single-point moored submersible fish cage under currents. Aquacult. Eng. 2010, 43, 38–45. [Google Scholar] [CrossRef]
- Choc, Y.-I.; Casarella, M.J. Hydrodynamic resistance of towed cables. J. Hydronaut. 1971, 5, 126–131. [Google Scholar] [CrossRef]
- Dnv-os-e301: Offshore Standard-Position Mooring. Available online: https://rules.dnvgl.com/docs/pdf/DNV/codes/docs/2010-10/OS-E301.pdf (accessed on 27 July 2018).
- Fredheim, A. Current Forces on Net Structures. Doctoral Dissertation, NTNU, Trondheim, Norway, April 2005. [Google Scholar]
- Wheeler, J. Methods for Calculating Forces Produced by Irregular Waves. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 18–21 May 1969. [Google Scholar] [CrossRef]
- Longridge, J.; Randall, R.; Zhang, J. Comparison of experimental irregular water wave elevation and kinematic data with new hybrid wave model predictions. Ocean Eng. 1996, 23, 277–307. [Google Scholar] [CrossRef]
- KMA. Available online: Http://www.Kma.Go.Kr/help/basic/help_03_02.Jsp (accessed on 27 July 2018).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value (Type) | Unit | |
|---|---|---|---|
| Net | Stretching Length | 60 | m |
| Width | 30 | m | |
| Height | 15 | m | |
| Material | Polyethylene | - | |
| Density | 970 | kg/m3 | |
| Head and ground ropes | Length | 30 | m |
| Diameter | 0.1 | m | |
| Material | Oak | - | |
| Density | 750 | kg/m3 | |
| Weight located to ground rope | Mass | 150 | kg |
| Number | 2 | - | |
| Buoy located to head rope | Volume | 0.243 | m3 |
| Number | 2 | - | |
| Buoyancy to weight ratio (BWR) | Net entrance | 1.5 | - |
| Net | 1.01 | - | |
| Mooring line and rope | Diameter | 9, 14, 34 | mm |
| Material | Polypropylene | - | |
| Density | 910 | kg/m3 | |
| Location buoy | Material | Styrofoam | - |
| Density | 50 | kg/m3 | |
| Volume | 0.2 | m3 | |
| Diameter | 0.73 | m | |
| Wave Condition | ||||
| Significant wave height, Hs (m) | 1.0 | 2.5 | 3.0 | 5.0 |
| Peak period, Tp (s) | 5.25 | 7.5 | 8.0 | 10.0 |
| Enhancement parameter, γ | 1.0 | 1.0 | 1.0 | 3.3 |
| Current Condition | ||||
| Surface current velocity (m/s) | 0.25, 0.50, 0.75, 1.00, 1.25, 1.50 | |||
| Environmental Condition | Net Horizontal Length | Net Vertical Deflection | Net-entrance Area | |||||
|---|---|---|---|---|---|---|---|---|
| Hs (m) | Tp (s) | Vc (m/s) | Average (m) | STD (m) | Average (m) | STD (m) | Average (m2) | STD (m2) |
| 1.0 | 5.25 | 0.25 | 56.388 | 0.364 | 7.001 | 0.354 | 444.261 | 6.663 |
| 0.50 | 59.380 | 0.140 | 3.870 | 0.213 | 425.402 | 7.371 | ||
| 0.75 | 59.897 | 0.038 | 2.507 | 0.167 | 380.829 | 6.424 | ||
| 1.00 | 59.869 | 0.002 | 0.053 | 0.013 | 301.256 | 0.487 | ||
| 1.25 | 59.650 | 0.004 | -1.432 | 0.010 | 233.214 | 0.538 | ||
| 1.50 | 59.513 | 0.004 | -2.123 | 0.016 | 189.985 | 0.772 | ||
| 2.5 | 7.5 | 0.50 | 58.523 | 0.617 | 3.892 | 0.675 | 412.753 | 15.592 |
| 0.75 | 59.638 | 0.331 | 2.322 | 0.525 | 371.378 | 13.182 | ||
| 1.00 | 59.860 | 0.010 | 0.060 | 0.164 | 300.352 | 3.182 | ||
| 1.25 | 59.645 | 0.009 | -1.429 | 0.090 | 233.045 | 1.633 | ||
| 1.50 | 59.511 | 0.009 | -2.113 | 0.060 | 190.171 | 1.603 | ||
| 3.0 | 8.0 | 0.50 | 58.278 | 0.859 | 3.878 | 0.888 | 406.872 | 19.095 |
| 0.75 | 59.524 | 0.471 | 2.380 | 0.673 | 366.843 | 15.899 | ||
| 1.00 | 59.855 | 0.014 | 0.059 | 0.253 | 299.487 | 4.764 | ||
| 1.25 | 59.643 | 0.011 | -1.427 | 0.140 | 232.884 | 2.223 | ||
| 1.50 | 59.511 | 0.012 | -2.108 | 0.090 | 190.196 | 1.863 | ||
| 5.0 | 10.0 | 0.50 | 57.866 | 1.481 | 3.249 | 1.578 | 396.399 | 29.666 |
| 0.75 | 59.191 | 0.934 | 1.953 | 1.257 | 359.045 | 26.331 | ||
| 1.00 | 59.804 | 0.135 | 0.006 | 0.643 | 294.512 | 12.315 | ||
| 1.25 | 59.641 | 0.019 | -1.407 | 0.380 | 231.391 | 5.248 | ||
| 1.50 | 59.514 | 0.029 | -2.085 | 0.251 | 189.573 | 2.987 | ||
| Environmental Condition | Surge Motion of the Location Buoy | Rope Tension | Mooring Tension #1 | |||||
|---|---|---|---|---|---|---|---|---|
| Hs (m) | Tp (s) | Vc (m/s) | Average (m) | STD (m) | Maximum (kN) | STD (kN) | Maximum (kN) | STD (kN) |
| 1.0 | 5.25 | 0.25 | 56.788 | 1.119 | 1.092 | 0.089 | 4.217 | 0.387 |
| 0.50 | 59.901 | 0.868 | 1.230 | 0.120 | 7.511 | 0.390 | ||
| 0.75 | 64.725 | 0.531 | 0.489 | 0.041 | 12.750 | 0.253 | ||
| 1.00 | 69.064 | 0.112 | 0.762 | 0.098 | 16.828 | 0.010 | ||
| 1.25 | 68.643 | 0.212 | 1.412 | 0.235 | 23.061 | 0.021 | ||
| 1.50 | 68.688 | 0.246 | 1.807 | 0.339 | 29.463 | 0.029 | ||
| 2.5 | 7.5 | 0.50 | 60.388 | 1.606 | 6.256 | 0.239 | 11.944 | 0.987 |
| 0.75 | 64.473 | 1.092 | 2.300 | 0.167 | 15.439 | 0.687 | ||
| 1.00 | 69.201 | 0.315 | 1.981 | 0.204 | 17.536 | 0.157 | ||
| 1.25 | 69.175 | 0.315 | 2.533 | 0.441 | 23.571 | 0.137 | ||
| 1.50 | 69.300 | 0.376 | 2.772 | 0.583 | 29.997 | 0.140 | ||
| 3.0 | 8.0 | 0.50 | 60.684 | 1.467 | 2.048 | 0.209 | 12.373 | 1.152 |
| 0.75 | 64.650 | 1.152 | 3.180 | 0.193 | 15.456 | 0.820 | ||
| 1.00 | 69.211 | 0.448 | 2.388 | 0.242 | 17.879 | 0.269 | ||
| 1.25 | 69.295 | 0.349 | 2.724 | 0.498 | 24.018 | 0.235 | ||
| 1.50 | 69.453 | 0.396 | 2.952 | 0.649 | 30.406 | 0.233 | ||
| 5.0 | 10.0 | 0.50 | 60.028 | 2.093 | 4.693 | 0.257 | 16.872 | 1.985 |
| 0.75 | 64.897 | 1.651 | 2.766 | 0.200 | 18.929 | 1.520 | ||
| 1.00 | 69.067 | 0.838 | 1.908 | 0.295 | 21.229 | 0.980 | ||
| 1.25 | 69.316 | 0.526 | 2.600 | 0.589 | 26.984 | 0.882 | ||
| 1.50 | 69.592 | 0.533 | 2.811 | 0.722 | 33.200 | 0.870 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, C.; Choi, J.; Kim, M.-H. Response Prediction and Monitoring Feasibility of a Stow Net System Using Measured Environmental Data in the Southwest Coast of Korea. Appl. Sci. 2018, 8, 1517. https://doi.org/10.3390/app8091517
Jin C, Choi J, Kim M-H. Response Prediction and Monitoring Feasibility of a Stow Net System Using Measured Environmental Data in the Southwest Coast of Korea. Applied Sciences. 2018; 8(9):1517. https://doi.org/10.3390/app8091517
Chicago/Turabian StyleJin, Chungkuk, Junho Choi, and Moo-Hyun Kim. 2018. "Response Prediction and Monitoring Feasibility of a Stow Net System Using Measured Environmental Data in the Southwest Coast of Korea" Applied Sciences 8, no. 9: 1517. https://doi.org/10.3390/app8091517
APA StyleJin, C., Choi, J., & Kim, M.-H. (2018). Response Prediction and Monitoring Feasibility of a Stow Net System Using Measured Environmental Data in the Southwest Coast of Korea. Applied Sciences, 8(9), 1517. https://doi.org/10.3390/app8091517