1. Introduction
Laminates made of different materials, such as plastic and metal, are referred to as hybrid laminates. The combination of metal sheets with fiber reinforced plastics (FRPs) results in completely new property profiles, which are characterized by low weight combined with high specific rigidity and strength. This enables high degrees of lightweight construction. The insertion of the metal layers significantly improves the damage tolerance of the FRP, making the hybrid laminates predestined for use in the aviation industry. A well-known representative is GLARE (Glass Laminate Aluminum Reinforced Epoxy), a glass fiber reinforced epoxy resin aluminum foil laminate, which is the result of further development of the oldest known hybrid laminate, ARALL (aramid fiber reinforced epoxy resin aluminum foil laminate). The layer structure of GLARE consists of glass fiber prepreg layers combined with aluminum sheets. However, due to the use of the thermoset matrix material, which has a long curing time, and the complex plant technology required, the production costs for these hybrid components increase [
1]. The challenge to reduce these costs was met in a joint project at Chemnitz University of Technology, and hybrid laminates with a thermoplastic matrix were developed under the brand names CAPAAL
© (carbon fiber reinforced polyamide aluminum laminate) and CAPET
© (carbon fiber reinforced polyetheretherketone titanium laminate) [
2].
Another approach to decreasing the weight is the integration of additional functions in structural components. Piezoceramic elements, for example, can be injection-molded with electrically conductive polymers and used, for example, for structural monitoring in fiber reinforced plastics [
3]. Similarly, piezoceramic fibers—which are inserted into microcavities produced by forming, and joined by forming technology—enable the monitoring of metal components [
4]. However, the efficient and large-scale production of hybrid laminates with large-area integration of sensors for detection and localization of impacts and deformations in hybrid sheet metal structural components is not yet available.
The forming of hybrid laminates presents a particular challenge in order to avoid failure of the individual layers due to tearing, delamination, and wrinkling. Successful forming can therefore only be achieved by adequate temperature control [
5]. Harhash [
6] goes on to discuss the effect of the core thickness on the mechanical properties. Furthermore, the failure during deep drawing is described, as is the beginning of crack propagation. Further research on the forming of hybrid laminate can be found in [
7]. The laminate is preheated and then formed in a heated tool. The exact description of the material properties at elevated temperature, especially near the melting temperature, is a great challenge for the finite element (FE) simulation. A possible approach is the determination of these characteristic values by a representative volume element [
8]. Nondestructive testing of hybrid laminates is also intended to detect defects that have a direct effect on the forming properties [
9].
One field of application for hybrid laminates is represented by impact detection. In this field of application, three main algorithm approaches have emerged. The first class includes algorithms detecting impacts by precomputed reference values [
10,
11]. These algorithms face the drawback of low adaptability, since each component has to be measured individually. The second class represents signal-theoretical approaches for impact detection relying on direction of arrival estimation. Determination of the direction of arrival is based on cross-correlation [
12], which is used for impact detection and localization on aircraft wings [
13]. The third class covers localization with machine learning methods. For this purpose, various signal properties are extracted and used as inputs for various machine learning training techniques [
14]. The main difference between the last two described classes are the good results from the signal processing class, as long as the objects are well shaped; if the objects are strongly deformed and no mathematical model can be found, machine learning approaches are preferred. The number of machine learning algorithms rises constantly and covers a wide range of research and application fields. Therefore, [
15] used the support vector machine, while [
16] relied on the kernel extreme learning machine. The most commonly used techniques are neural networks [
17,
18], whereby the quality of the procedure always depends on the features used to represent the selected signal property. Haywood et al. [
19] and LeClerc et al. [
20], for example, used features generated by Fourier and Hilbert transform, accompanied by high computational costs. In contrast, [
12] focuses on features with low computational effort. The machine learning methods and signal properties to use cannot be generically determined and depend on the respective application.
The rest of this work is organized as follows. First, a novel manufacturing process for hybrid laminates with sensor functionality is described, addressing a continuous process chain and guaranteeing constant quality. Subsequently, a digital signal processing chain is described, demonstrating that the manufacturing process is accurate, does not damage sensor functionality, and has practicable usability. Finally, a conclusion about the presented results is drawn.
2. Manufacturing of Hybrid Laminates with Sensor Functionality
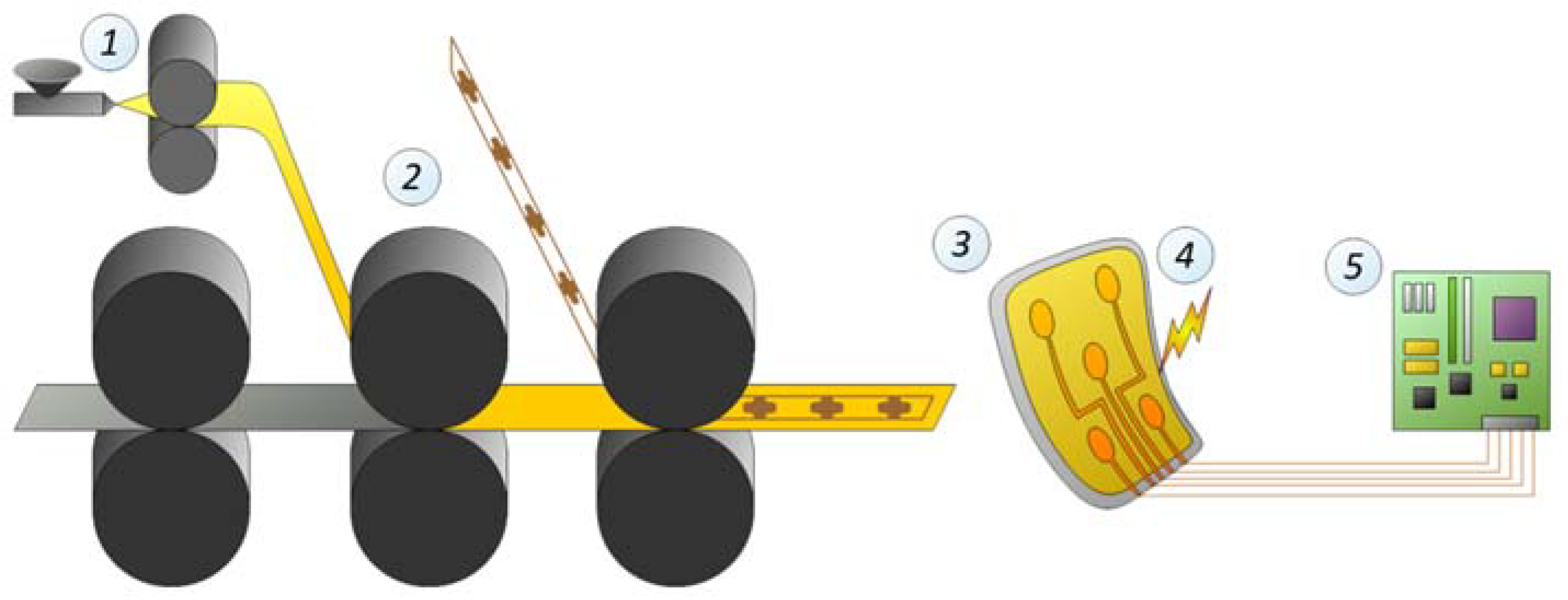
For manufacturing of hybrid laminates with sensor functionality [
21], a large-scale process chain was developed. This innovative process chain combines the polymer processing technologies of compounding and foil extrusion with the rolling and forming of metal parts. In the first subprocess (
Figure 1, label 1), the starting materials are blended into a piezoceramic thermoplastic compound and extruded as a thin foil, which forms the active component of the hybrid laminate. Therefore, the polypropylene homopolymer Moplen HP501H (LyondellBasell, Rotterdam, the Netherlands) is functionalized with piezoceramic lead zirconate titanate (PZT) powder NCE 55 (Noliac A/S, Kvistgaard, Denmark) and carbon nanotubes (CNTs) NC7000 (Nanocyl S.A., Sambreville, Belgium). The optimal material composition and processing properties were determined in previous investigations. Hence, the piezoceramic foil consisted of 70 wt % PZT and 0.5 wt % CNTs [
22,
23]. A foil thickness of 250 µm provides the optimal conditions for joining (
Figure 1, label 2) the piezoceramic foil with aluminum sheets. The surface of the aluminum metal sheet (EN AW-6082 T4 with a thickness of 0.5 mm) was treated before joining. Grinding and additional etching with sodium hydroxide has proven to be a reliable method (acceptable adhesion when close to a large-scale reaction). After joining the piezoceramic foil and the copper sheets, cutting was carried out by water jet. A special tool concept was developed for the forming process, in which the composite is heated, formed, and cooled in the tool (
Figure 1, label 3).
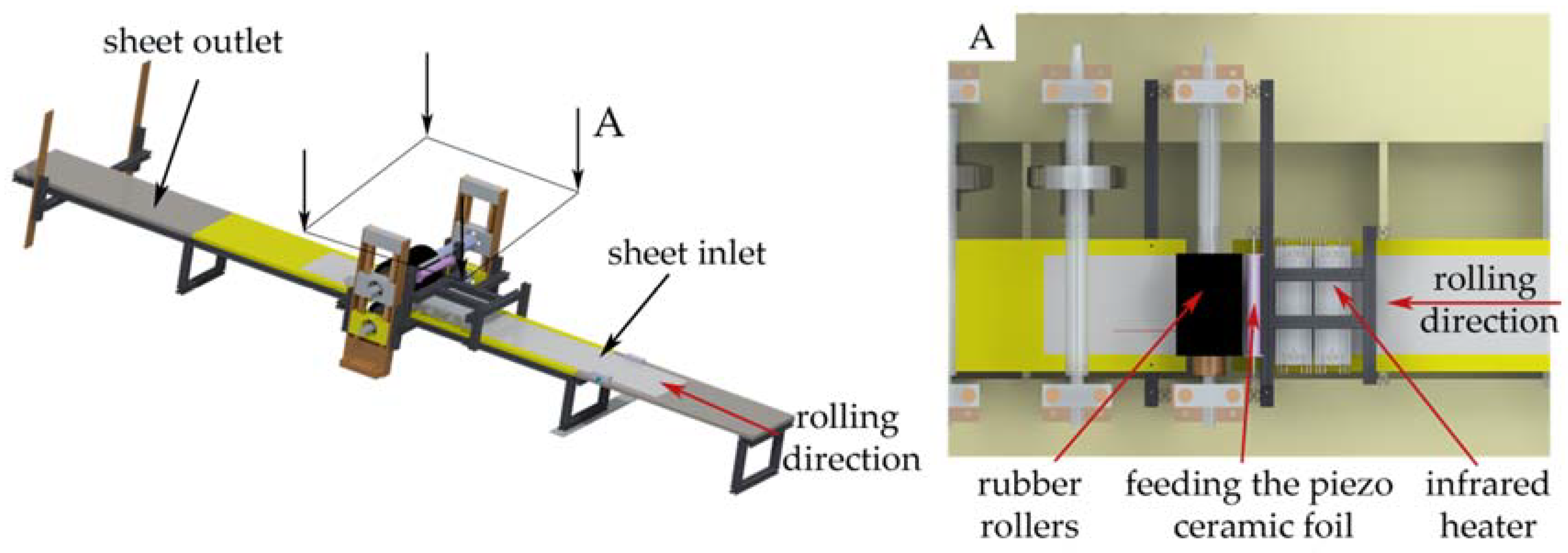
For continuous joining, the first tests were carried out on a pilot rolling mill [
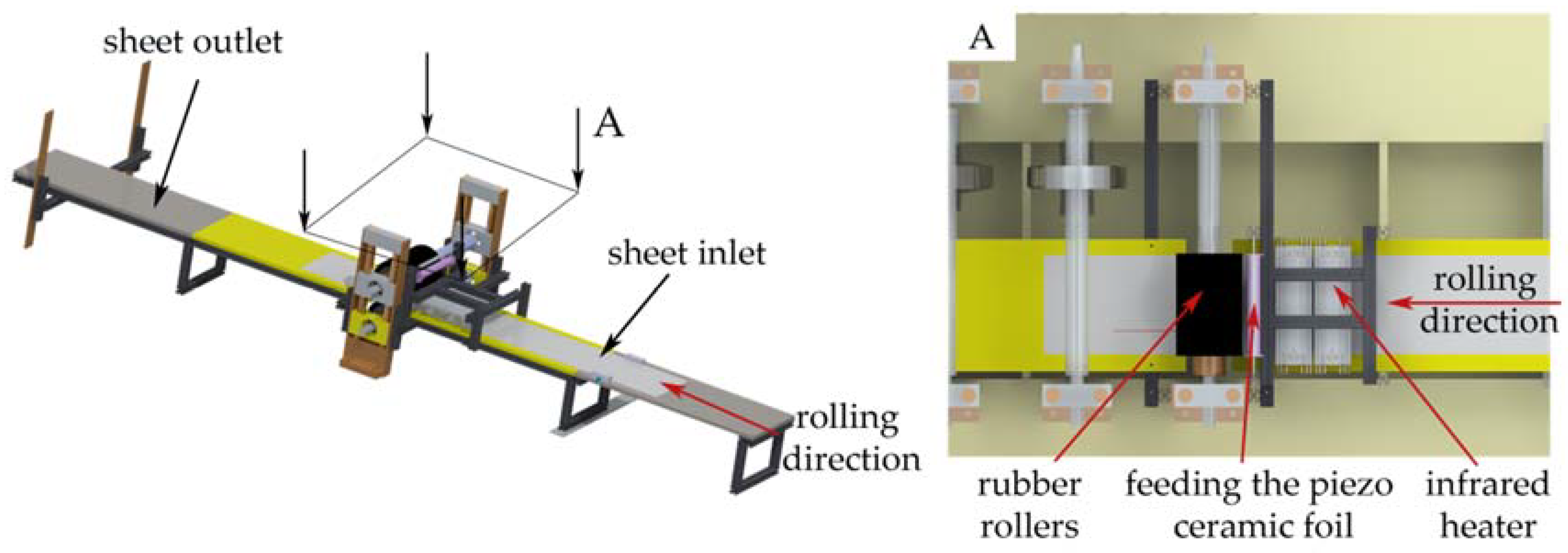
24]. After successful completion, a system was developed which allows a sample size with a width of up to 300 mm and a theoretically infinite length. The concept is shown in
Figure 2. The system consists of a sheet metal inlet, which is also used for heating, and a sheet metal outlet, in which the finished composite cools down slowly. The actual joining process takes place directly after heating by infrared radiation (
Figure 2, right A). After feeding the piezoceramic foil and (optionally) the copper strips, the composite is joined by the pressure of the rubber rollers. The thermoplastic melts in the contact area and forms a strong bond by adhesion. The process is monitored by thermocouples under the infrared radiators, and the temperature is measured by a pyrometer just before the rolls. The first tests showed that the parameters are not completely transferable from the pilot rolling mill. Due to the larger width of the sheets, the infrared emitters were arranged differently, thus causing better coupling and heating in the sheet. After a short parameter variation, it was possible to find the appropriate setting and produce hybrid laminates with sensor functionality.
The forming of the hybrid laminates was investigated in preliminary tests by V-bending and deep-drawing. The forming temperature, at which the brittle plastic does not tear or flow out, was particularly important. All the described preliminary work was carried out with a tool heated by heating cartridges and samples preheated in the furnace. The V-bending experiments showed that if the temperature is too low, the piezoceramic compound cracks. This is due to the fact that it is rather brittle due to the high proportion of ceramics. Only from a forming temperature of 100 °C did the piezoceramic compound not fail. With a further increase in temperature to 180 °C, the plastic flowed due to the reduction in viscosity. This was particularly evident at 180 °C, at which the piezoceramic compound was strongly thinned out and flowed laterally out of the sample (a more exact description is published in [
24,
25]). To further limit the forming temperature, DSC (differential scanning calorimetry) analysis of the piezoceramic compound was carried out. DSC confirmed the results of the preliminary tests: the melting starts at 110 °C and the maximum enthalpy of melting is reached at 167.8 °C, which also represents the melting point.
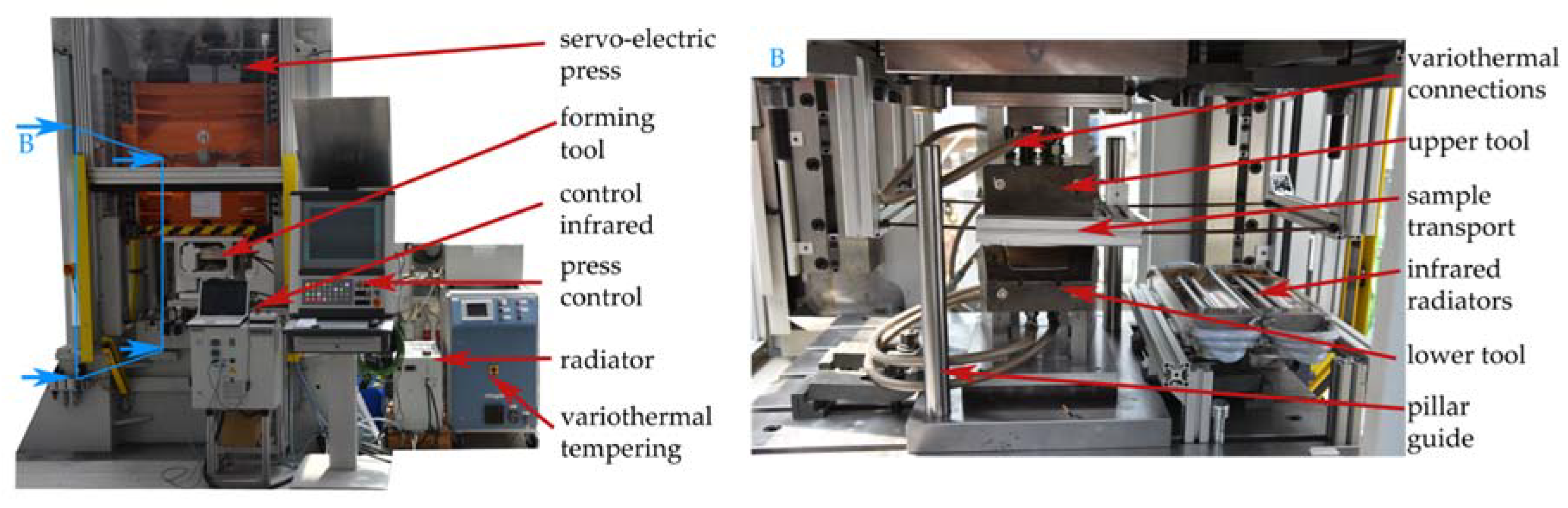
The findings were transferred to the manufacture of a cover for the center console of an automobile. With this part, it should be possible to carry out different actions in the car by localizing impacts. A new tool concept was developed for the forming process.
Figure 3 shows the overall structure of a servo-electric press. Instead of heating cartridges, a variothermal heater was used, which uses water to heats the tool to 190 °C and cools it down to 20 °C again. This occurs by two separate circuits, which are connected by valves. Furthermore, an oven for preheating was omitted, and the heating was placed directly in the press by means of infrared radiators (
Figure 3, right B). The procedure is as follows: The sample is inserted into the sample holder and preheated by means of infrared radiation. The specimen holder can be moved and is pushed on a guide to the tool. The free programming of the servo-electric press allows initial bending of the outer cover geometry when the tool is closed in a path-controlled manner, and then switches to a force-controlled control system in order to deep-draw the inner contour with the drawing cushion. Upon completion of the forming process, the hot forming tool is rapidly cooled by the variotherm unit. Thus, the plastic solidifies, and the component can be removed afterward.
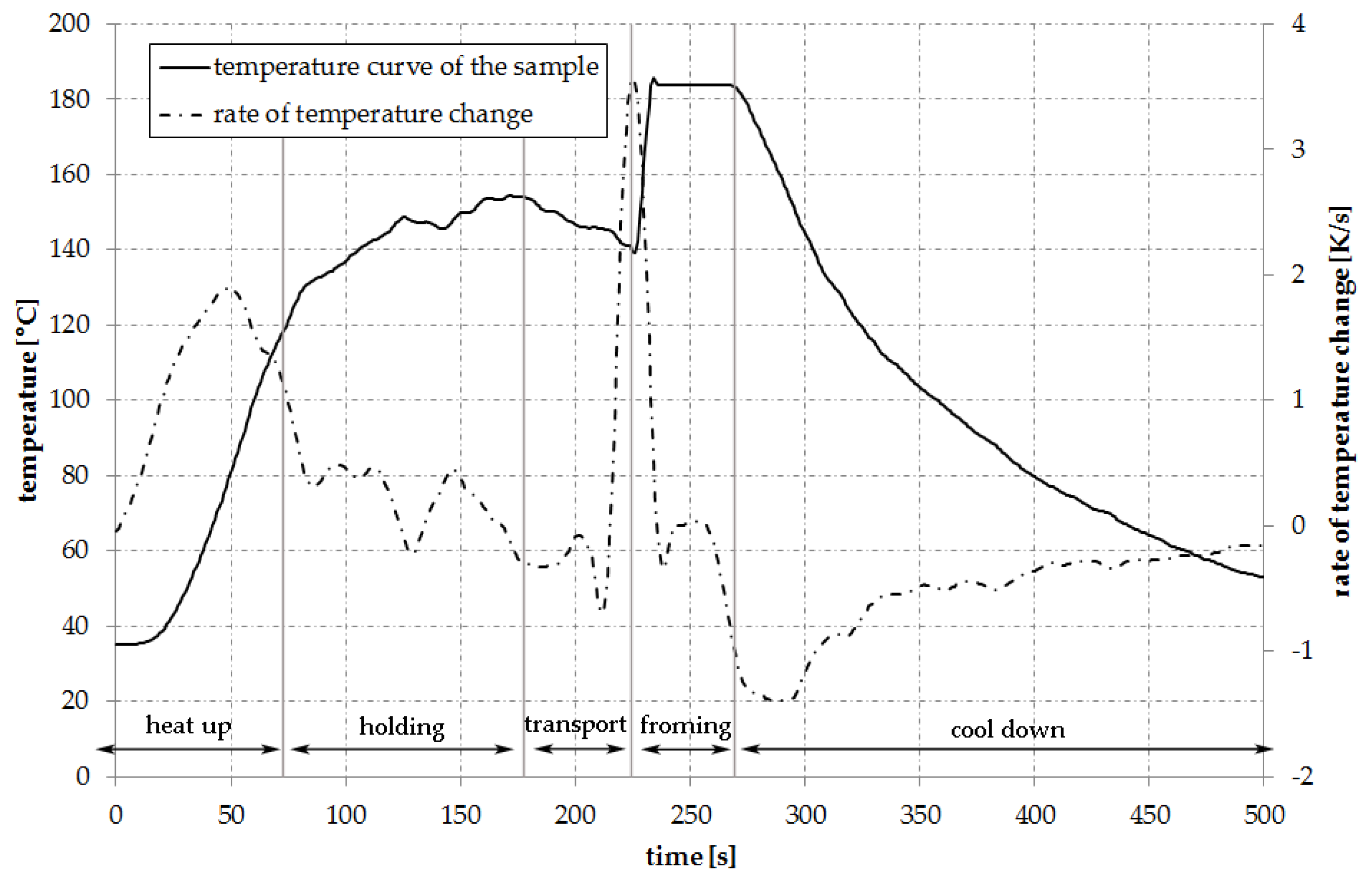
To adjust the process, a sample made only of aluminum was provided with thermocouples in order to record the working temperature (
Figure 4). The rate of the temperature change was determined by the first derivative over time, which clearly showed the alternation of heating, holding, and cooling. The process steps described above are indicated in
Figure 4.
In the tests, the preheating temperature and the die temperature proved to be the most important parameters for defect-free forming. If these temperatures are set too low, tears and/or delamination occurs.
Figure 5 shows the behavior if the temperature in the process is too high and the viscosity of the plastic is too low. It can be seen that the plastic flows out of the drawing gap, and thinning occurs in the middle. The parameters for the experiment were: preheating temperature infrared radiator 200 °C and tool temperature 170 °C. These parameters are identical to those from the test in
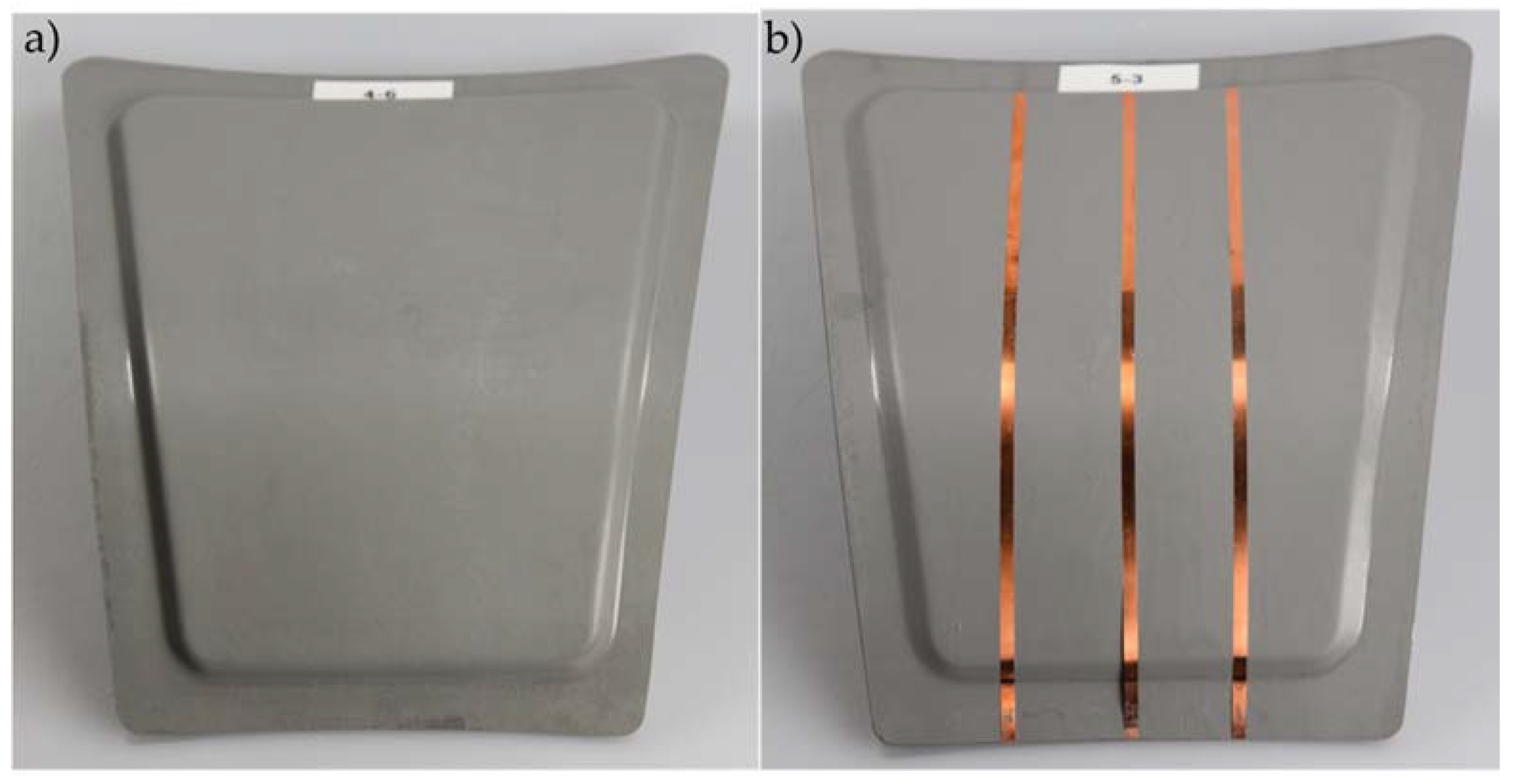
Figure 4, and, when looking closely at the measured value, it can be determined that the temperature was above the melting temperature of the DSC analysis. After further tests, and by adjusting the parameters to the preheating temperature of the infrared radiator 180 °C and the tool temperature 150 °C, a component could be produced without thinning and melting, and without cracks. Two variants formed with these parameters are shown in
Figure 6. The first variant is without copper strips (
Figure 6a); it is mainly used for the individual application of electrodes. The second variant represents the complete mass production of a component with electrodes (
Figure 6b). The results showed that the process is mastered and that, with the right parameters, a component can be produced without defects.
For activating the sensor effect of the hybrid laminate, a polarization process has to be conducted (
Figure 1, label 4). Due to the extrusion, joining, and forming temperatures, which are higher than the Curie temperature of the PZT component, the piezoceramic particles depolarize during these processes. Therefore, the functionalized hybrid laminate must be polarized after the forming process. Based on previous experiments, the polarization process was conducted at elevated temperatures, between 100 °C and 120 °C [
24]. In this temperature range, it is possible to polarize the piezoceramic layer during the cooling phase, after forming the hybrid part. By using this procedure, the residual heat of the forming process renders the reheating for polarization redundant. This approach has great potential for saving energy and resources, as well as for reducing cycle times during the fabrication process of multifunctional lightweight structures based on hybrid laminates.
In order to demonstrate real-world functionality, practical usability, and accuracy of the described manufacturing process, one center console, shown in
Figure 6a, was equipped with four sensors to detect and localize the touch of a human finger. Therefore, the following section presents a novel measurement system architecture with integrated machine learning functionality.
4. Conclusions
A new hybrid laminate with sensor functionality was presented. It offers the possibility of combining lightweight construction and functional integration into a component, and producing it in large quantities. For this purpose, it was necessary to develop a continuous joining technology which combines continuous piezoceramic foil and an aluminum sheet, and it guarantees a constant quality. This was achieved through previous research and further investigation.
A new heating concept and a new tool concept using variothermal tempering were developed for further processing. Both have been integrated into a servo-electric press to minimize cycle time and energy loss caused by transport. By measuring the temperature on a sample plate, the process was verified. Good parts of high quality were produced with appropriate parameters.
In further investigations, the parts will be scanned by an optical measuring system and compared with the target geometry. The acquired information about thinning and springback will form the basis of adjusting the FE simulation and further improving the process. The polarization behavior of hybrid laminates with modified PZT components, as well as the development of tool concepts for in-line polarization processes, are still part of ongoing research activities.
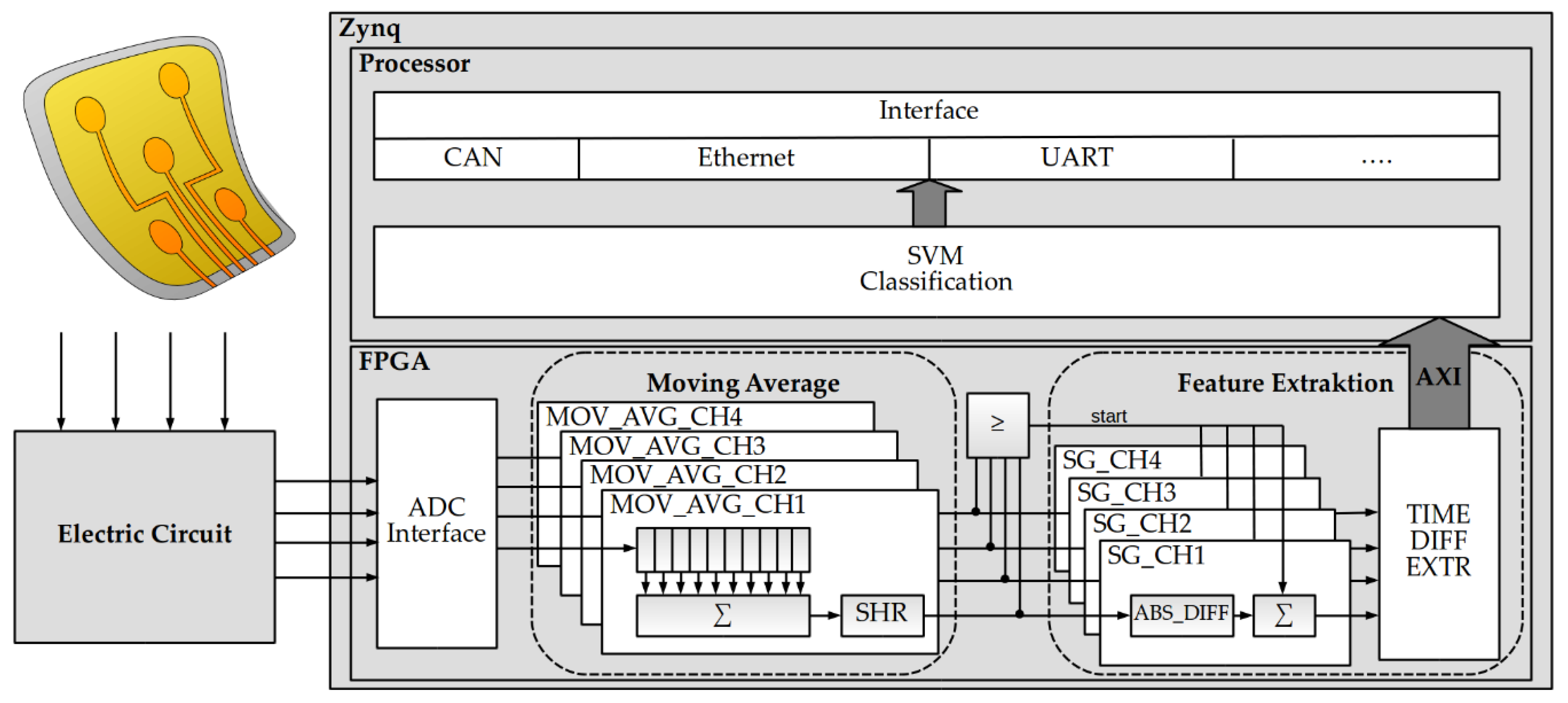
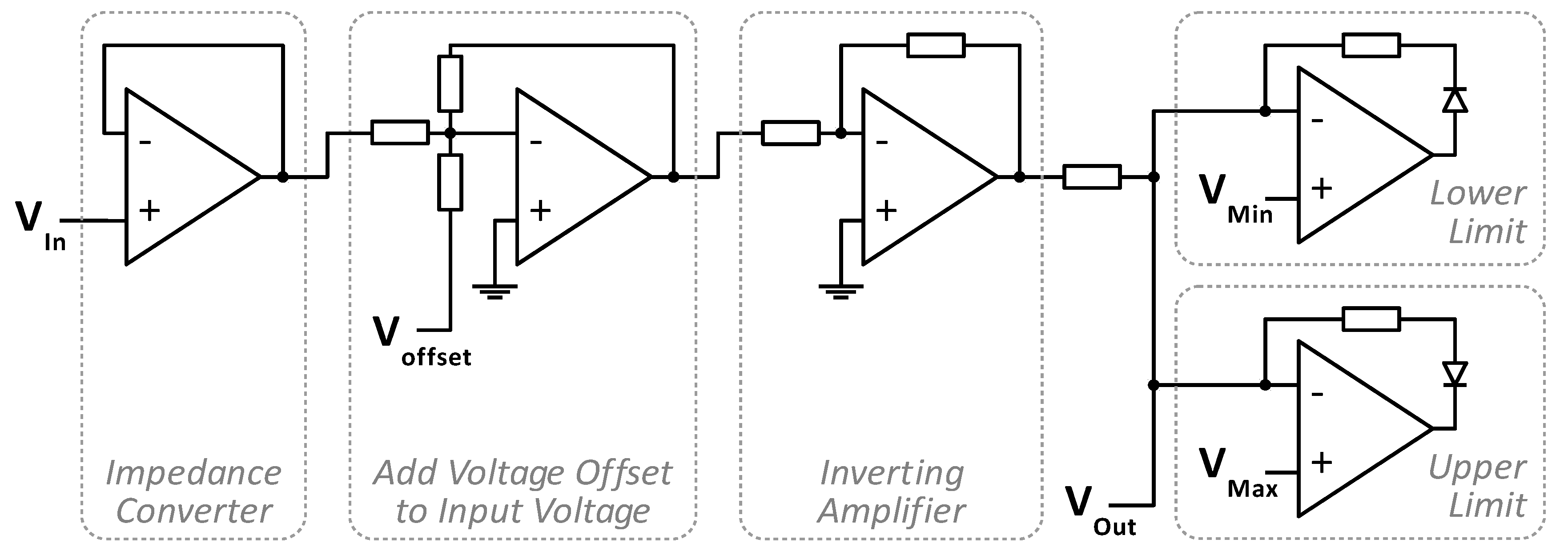
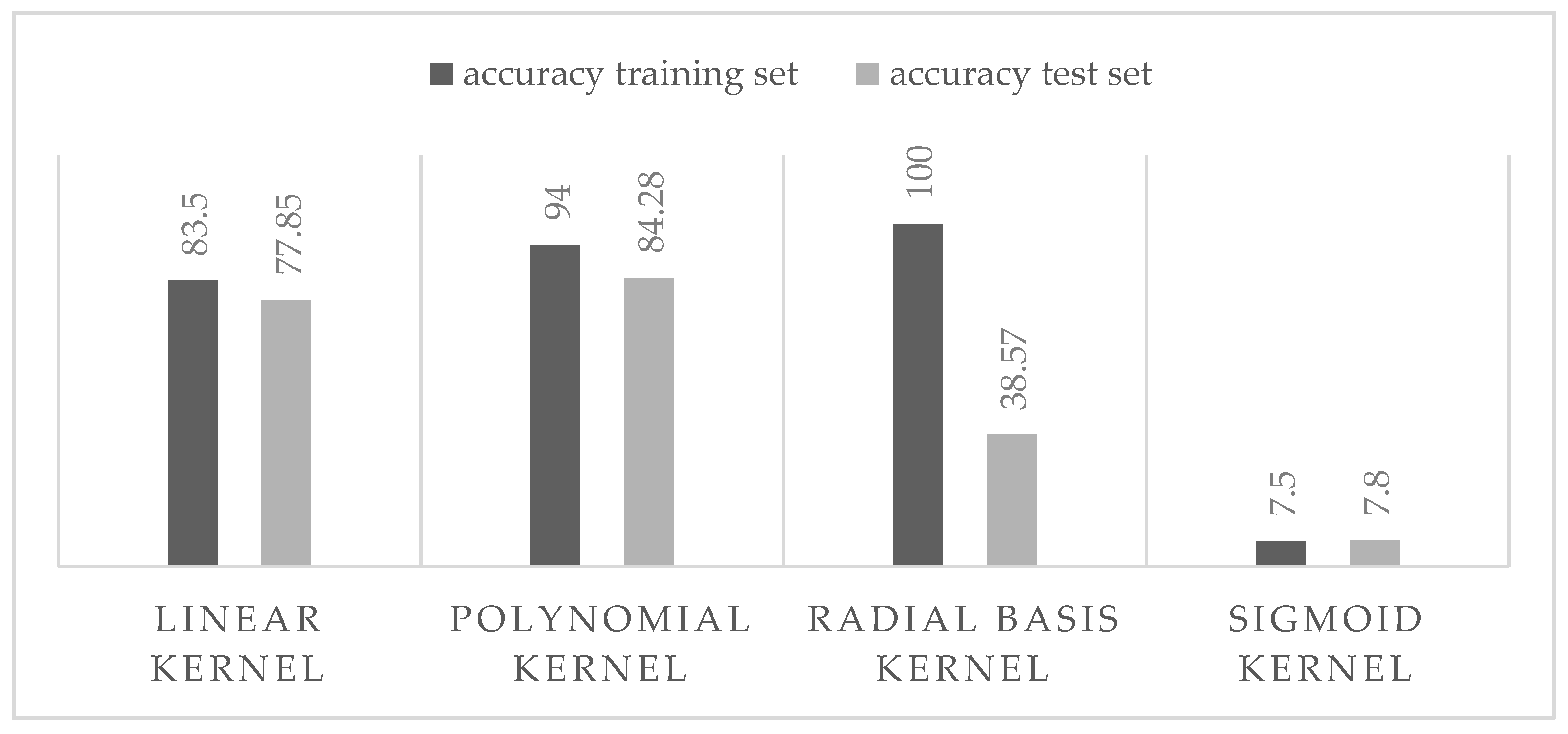
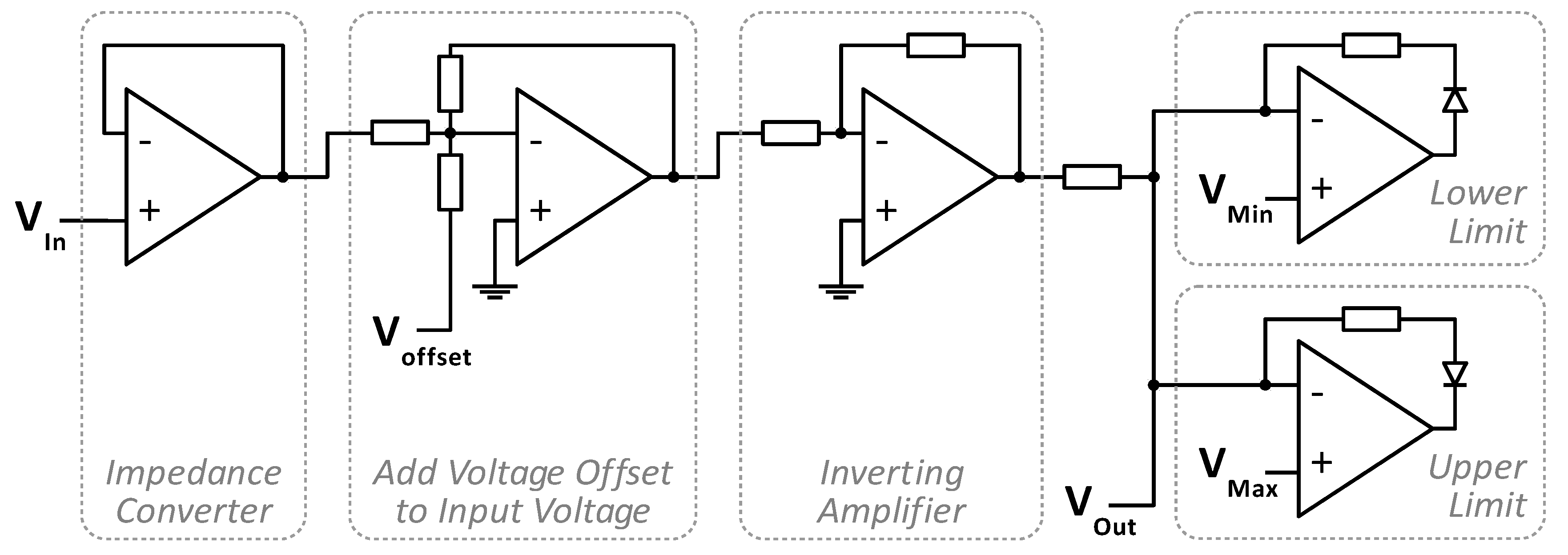
In the signal processing part, an electrical circuit was implemented to amplify the low impedance piezoelectric effect signal and to ensure the correct measuring range. On the other hand, a full pipelined FPGA structure was presented, guaranteeing real-time processing. On the basis of the novel SoC architecture, the feature determined in the FPGA can be passed directly to the ARM processor, which classifies the features using an SVM, which had 94% accuracy on the training set and 84% on the testing set. With a power consumption of approximately 1.7 W, the presented solution is also very efficient in terms of energy consumption, enabling usage in mobile devices. However, although the used data set represents a valid basis for ensuring the evidence of feasibility, additional human-specific parameters, such as touch pressure, touch length, and characteristics of human fingers, have to be evaluated in further research before commercial use.
In summary, a novel manufacturing process for the production of piezo-based hybrid laminates was described. Further processing of the laminate—forming and in-line polarization—enable multifunctional structures, e. g., automotive center consoles with integrated touch functionality. The input gestures are processed by machine learning methods on an embedded system. The accuracy of the procedure was presented by an energy-efficient and real-time SoC solution, which precisely localized points of touch by human fingers. This demonstrates the practicability and usability of the hybrid laminates and the signal processing.

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}