An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation



Abstract
1. Introduction
2. Sparse Filtering
3. Nature of Input Dimension and Overfitting
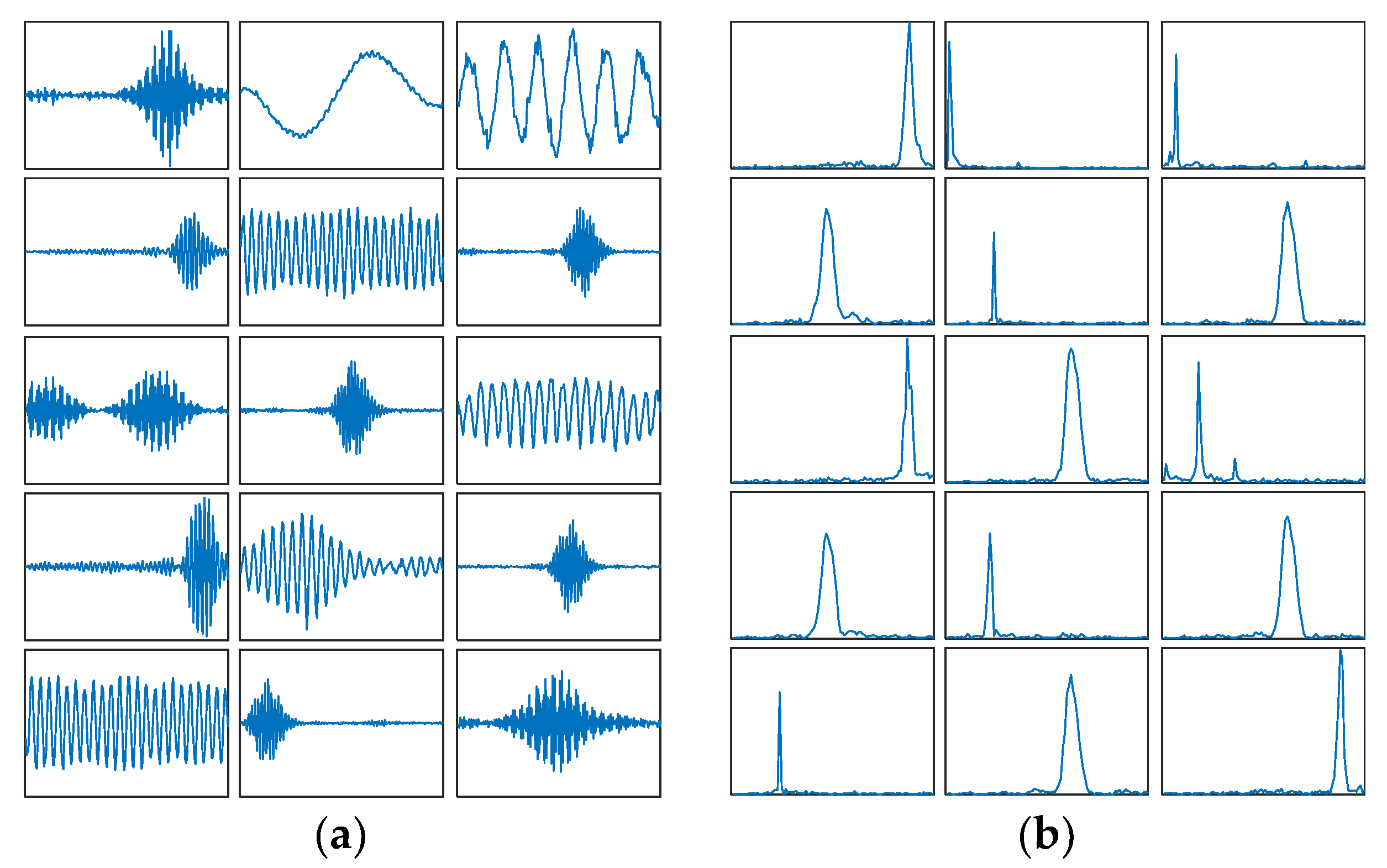
3.1. Characteristics of Harmonic Signals
3.1.1. Consider Different Initial Phases
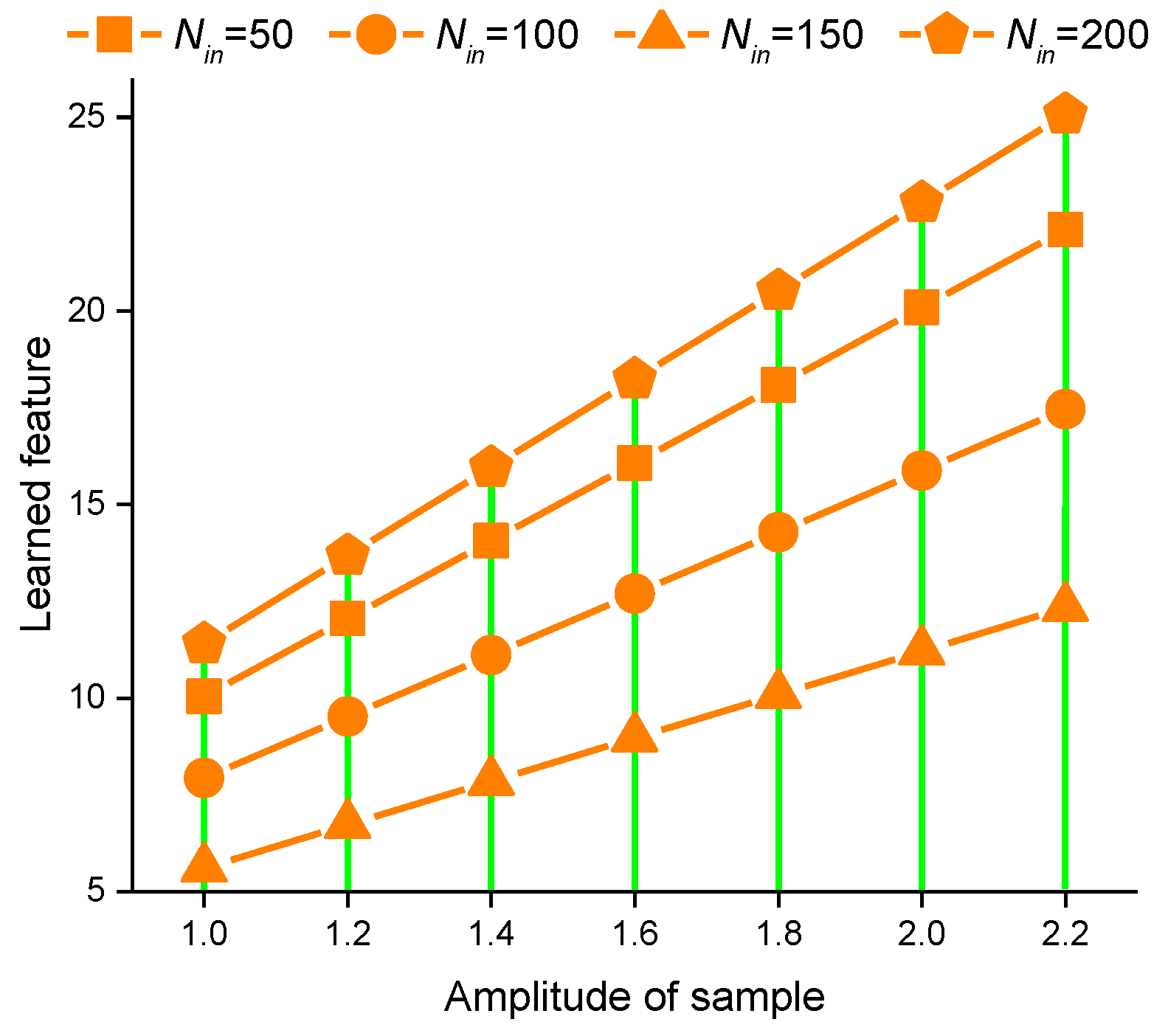
3.1.2. Consider Different Amplitudes
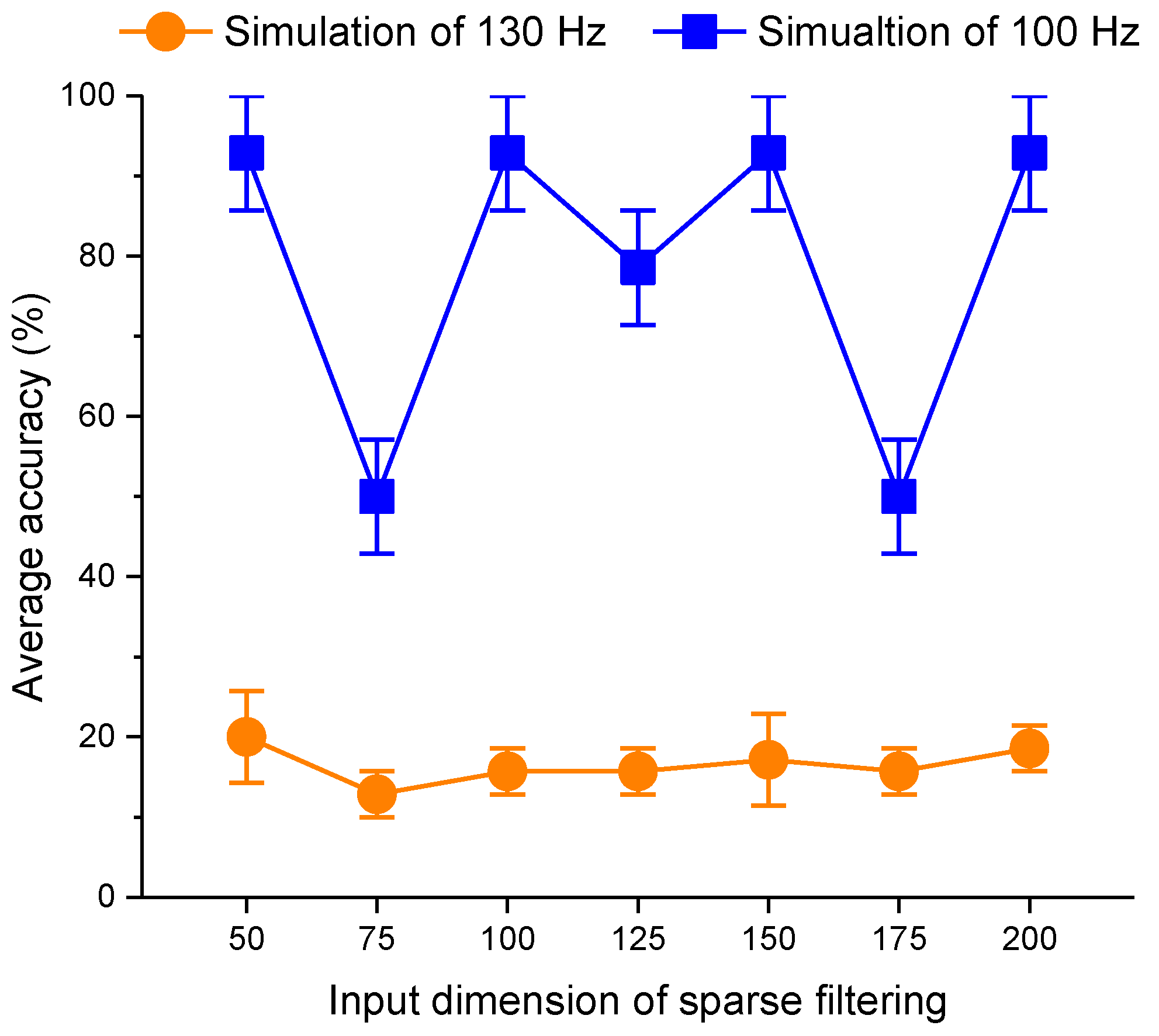
3.1.3. Consider Different Rotational Frequencies
- (1)
- Sparse filtering is unable to classify the initial phase information.
- (2)
- Sparse filtering can recognize the amplitude information, but the input dimension does not affect the learned features of sparse filtering.
- (3)
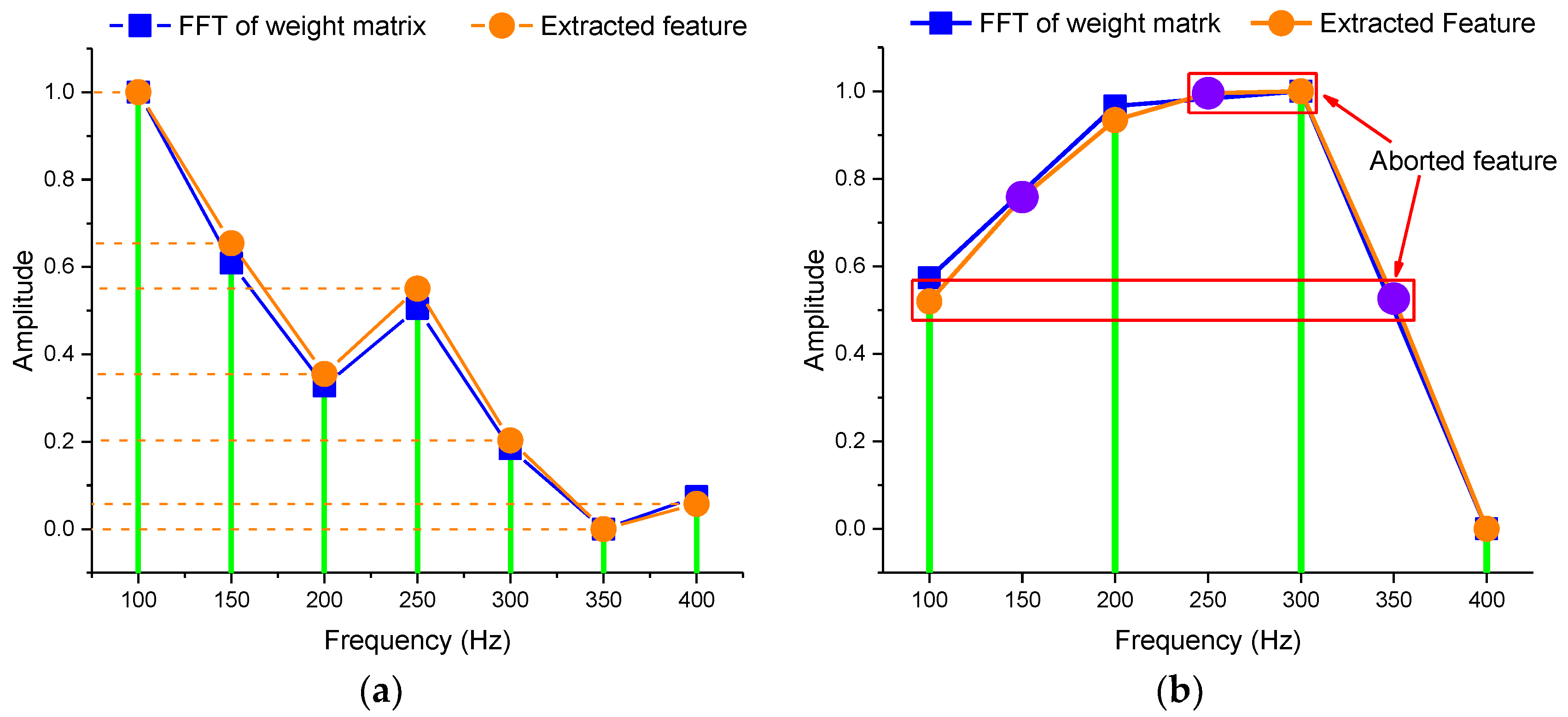
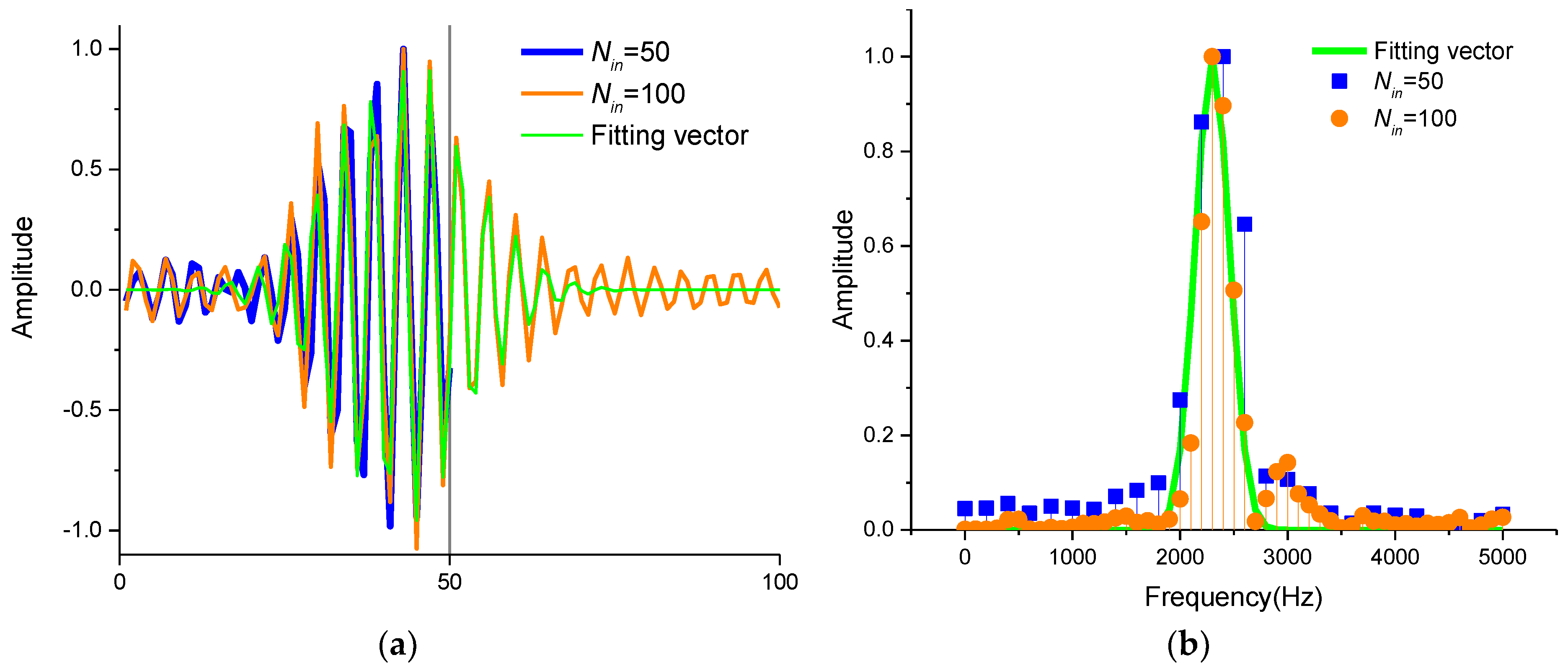
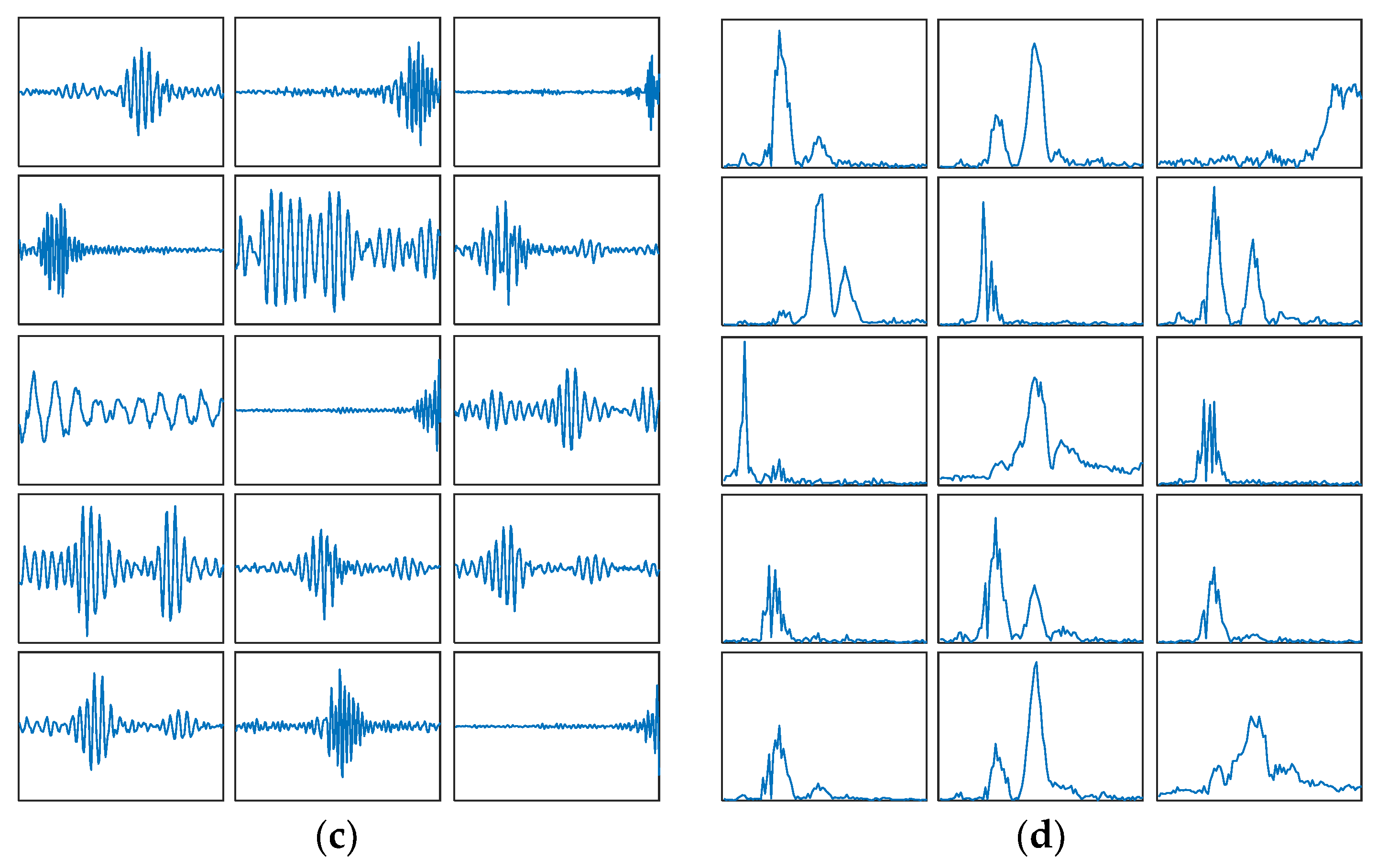
- The learned features of sparse filtering can reflect the frequency information. Additionally, the frequency resolution of weight matrix depends on the input dimension. The features are unstable when the input dimension reduces in size.
3.2. Explanation for the Input Dimension Based on Vibration Signals
3.2.1. Data Description
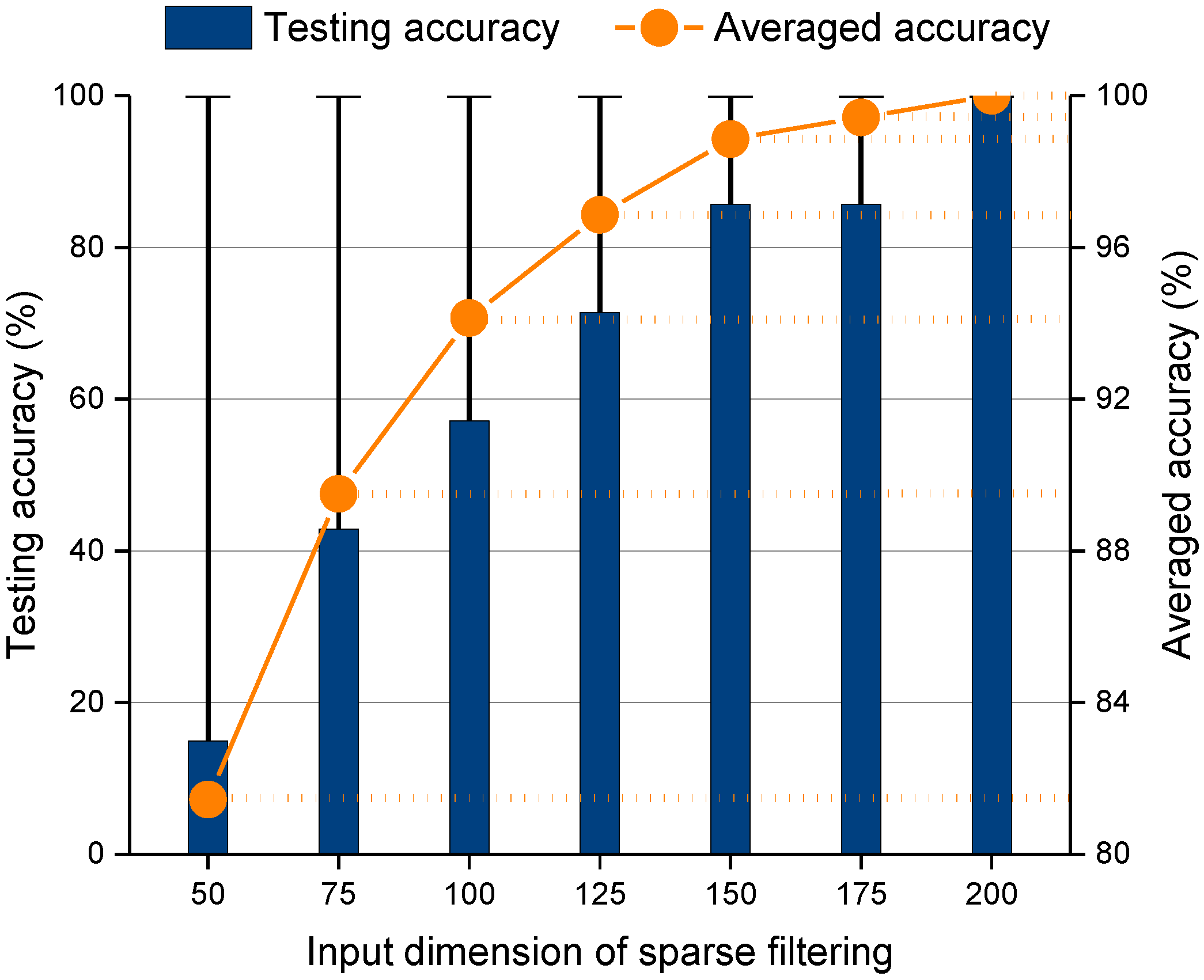
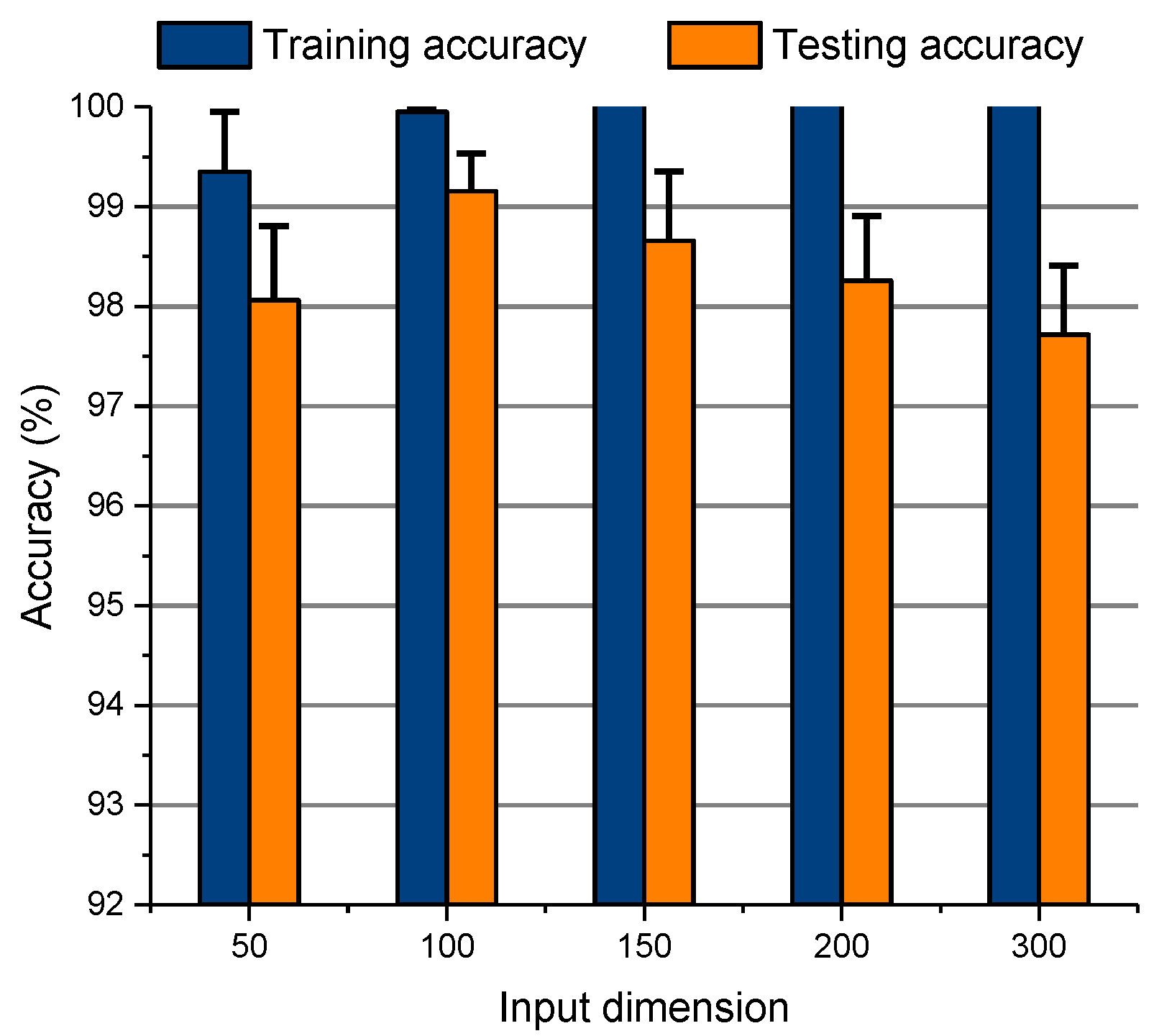
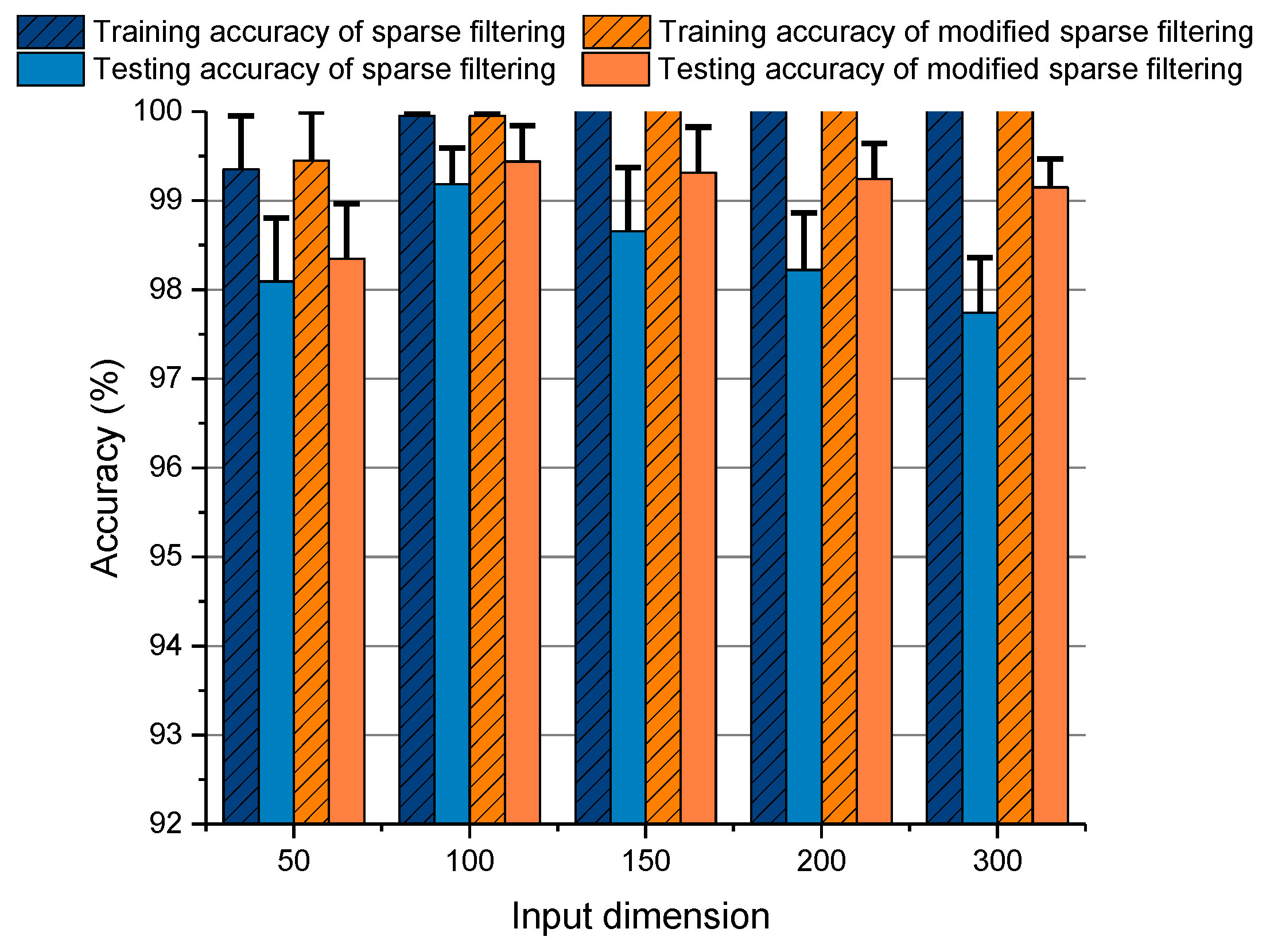
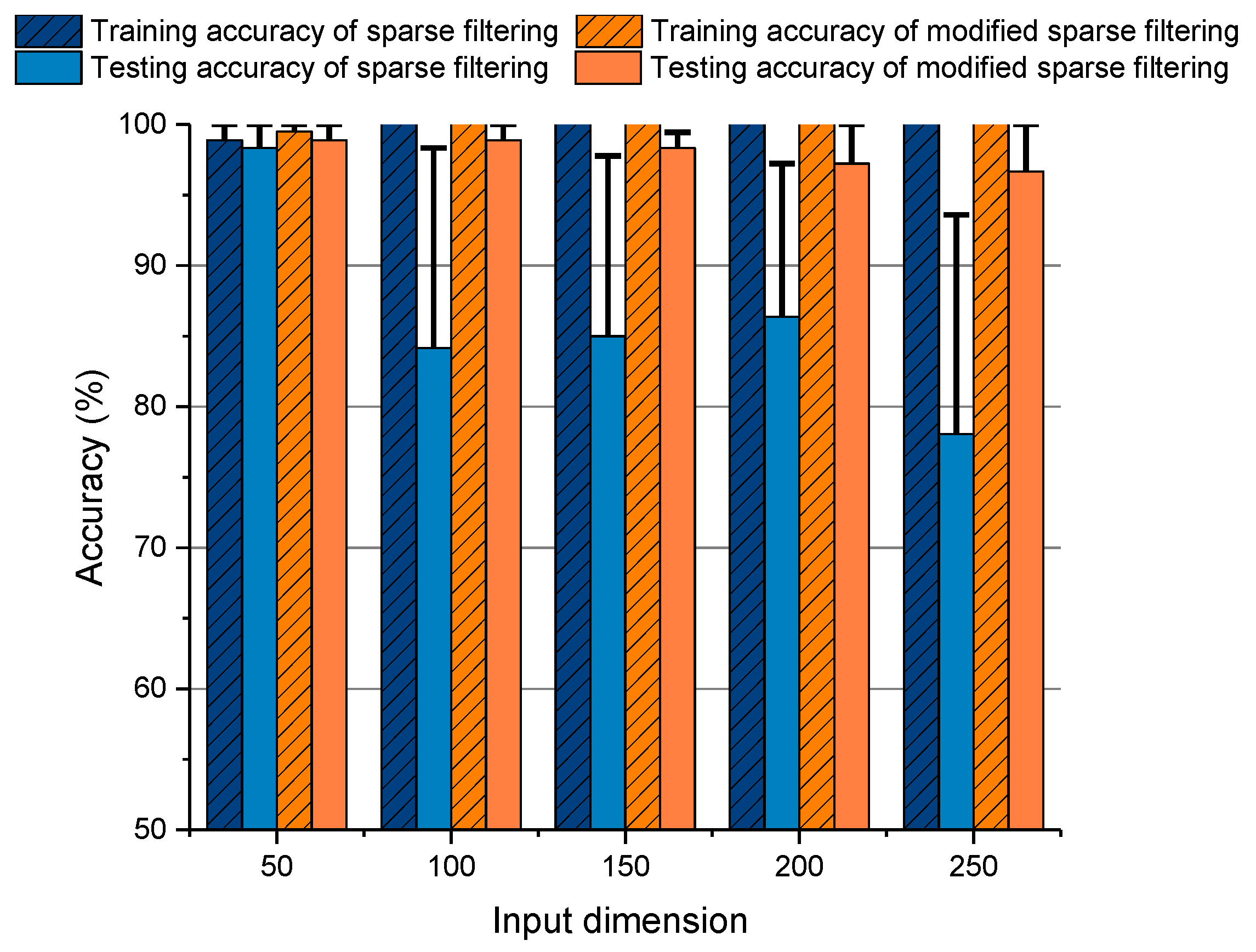
3.2.2. The influence of Input Dimension of Sparse Filtering
3.3. The Nature of the Overfitting Phenomenon
4. Modified Sparse Filtering and Two-Stage Learning Method
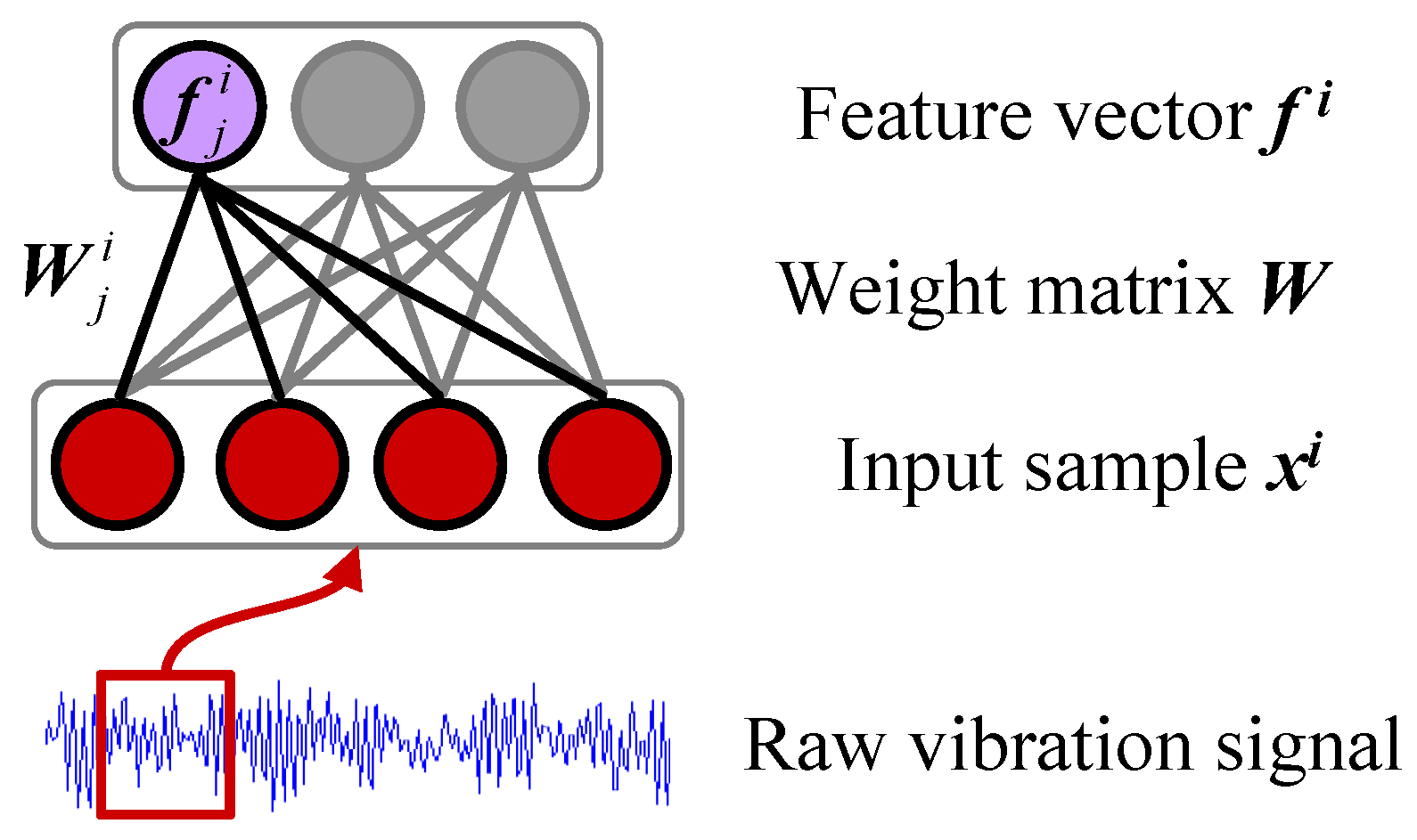
- Collect signals. The vibration signals of machines are obtained under different health conditions. These signals compose the training set , where is the ith sample containing M vibration data points and yi is the health condition label. We collect Ns segments from each sample to compose the training set by an overlapped manner, where is the jth segment containing Nin data points. The set is rewritten as a matrix form .
- Whitening. It is necessary to pre-process S by whitening. Whitening uses the eigenvalue decomposition of the covariance matrixwhere E denotes the orthogonal matrix of eigenvectors of the covariance matrix cov(ST), and D is the diagonal matrix of the eigenvalues. The whitened training set Sw can then be obtained as follows:
- Train sparse filtering.Sw is employed to train the modified sparse filtering model; as a result, the weight matrix W is obtained by minimizing Equation (8).
- Calculate the local features. The training sample xi is alternately divided into K segments, where K = N/Nin. These segments constitute a set , where . The local features can be calculated from each training sample by the weight matrix W.
- Obtain the learned features. The local features are combined into a feature vector by averaging, and is the learned feature vector:
- Train softmax regression. Once the learned feature set is obtained, we combine it with the label set to train softmax regression.
5. Fault Diagnosis Using the Proposed Method
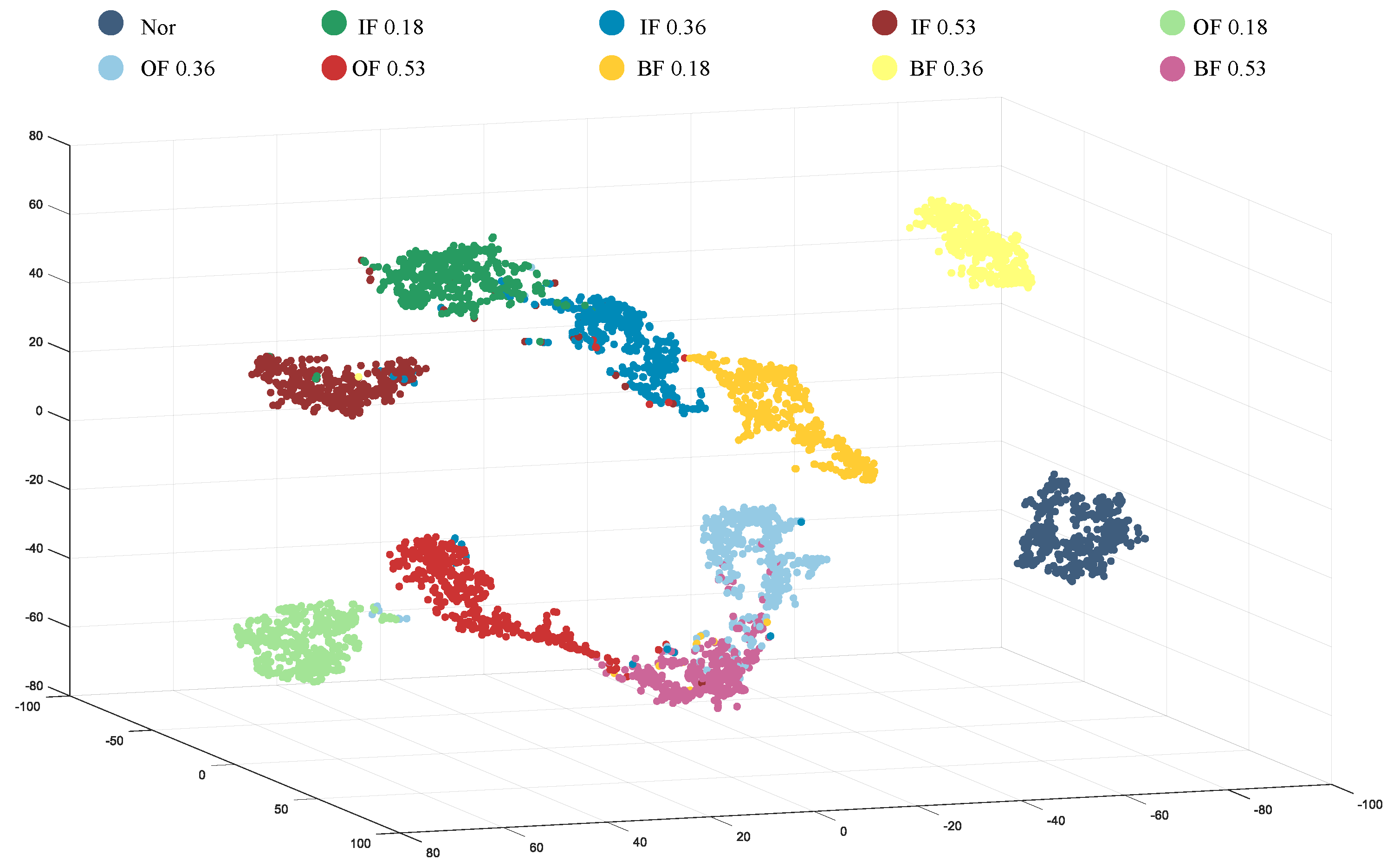
5.1. Case Study 1: Fault Diagnosis of Motor Bearing
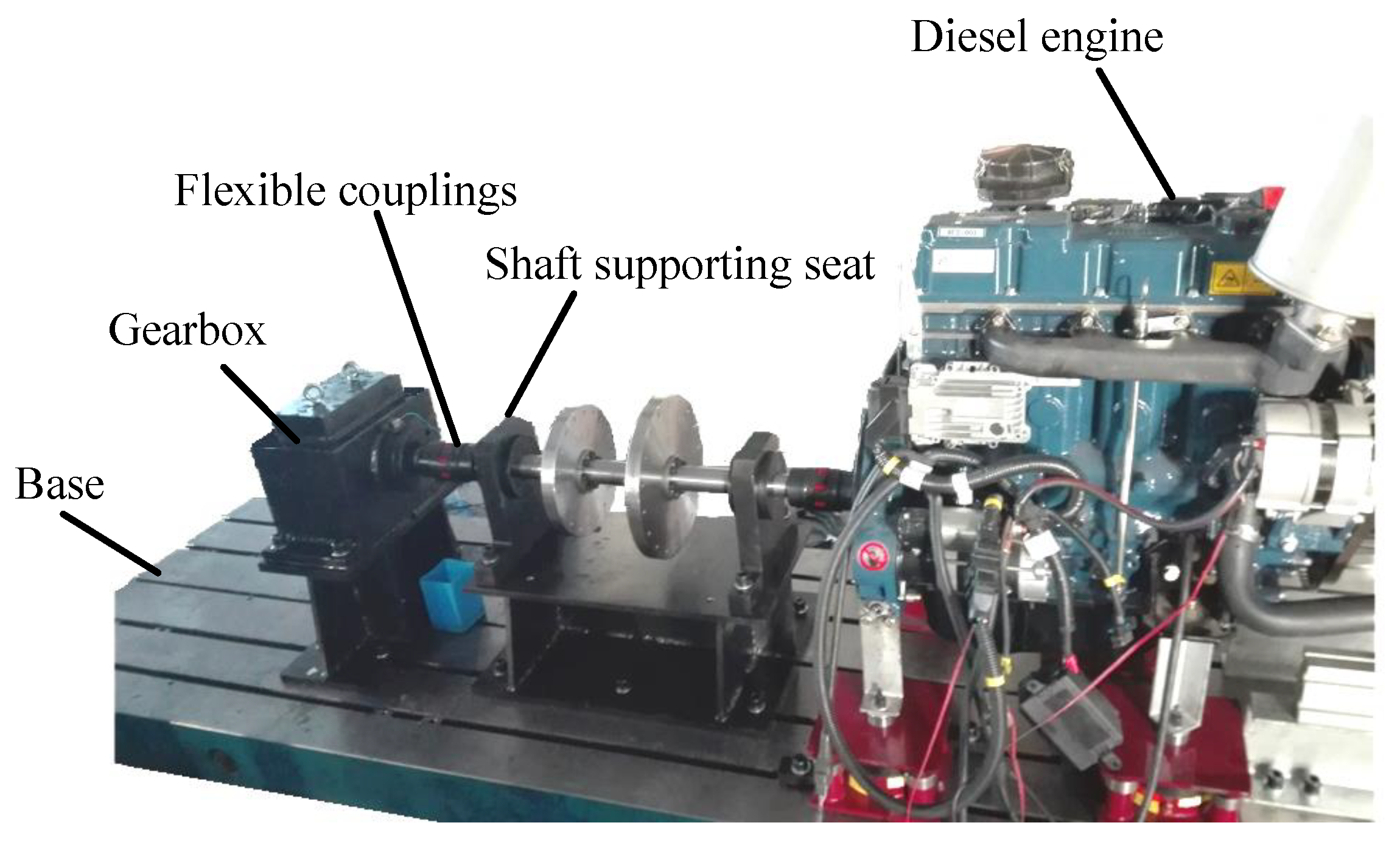
5.2. Case Study 2: Fault Diagnosis of Gearbox
6. Conclusions
- The interpretation of input dimension is studied based on the harmonic signal groups and bearing vibration signals. It can be concluded that the frequency resolution of weight matrix depends on input dimension.
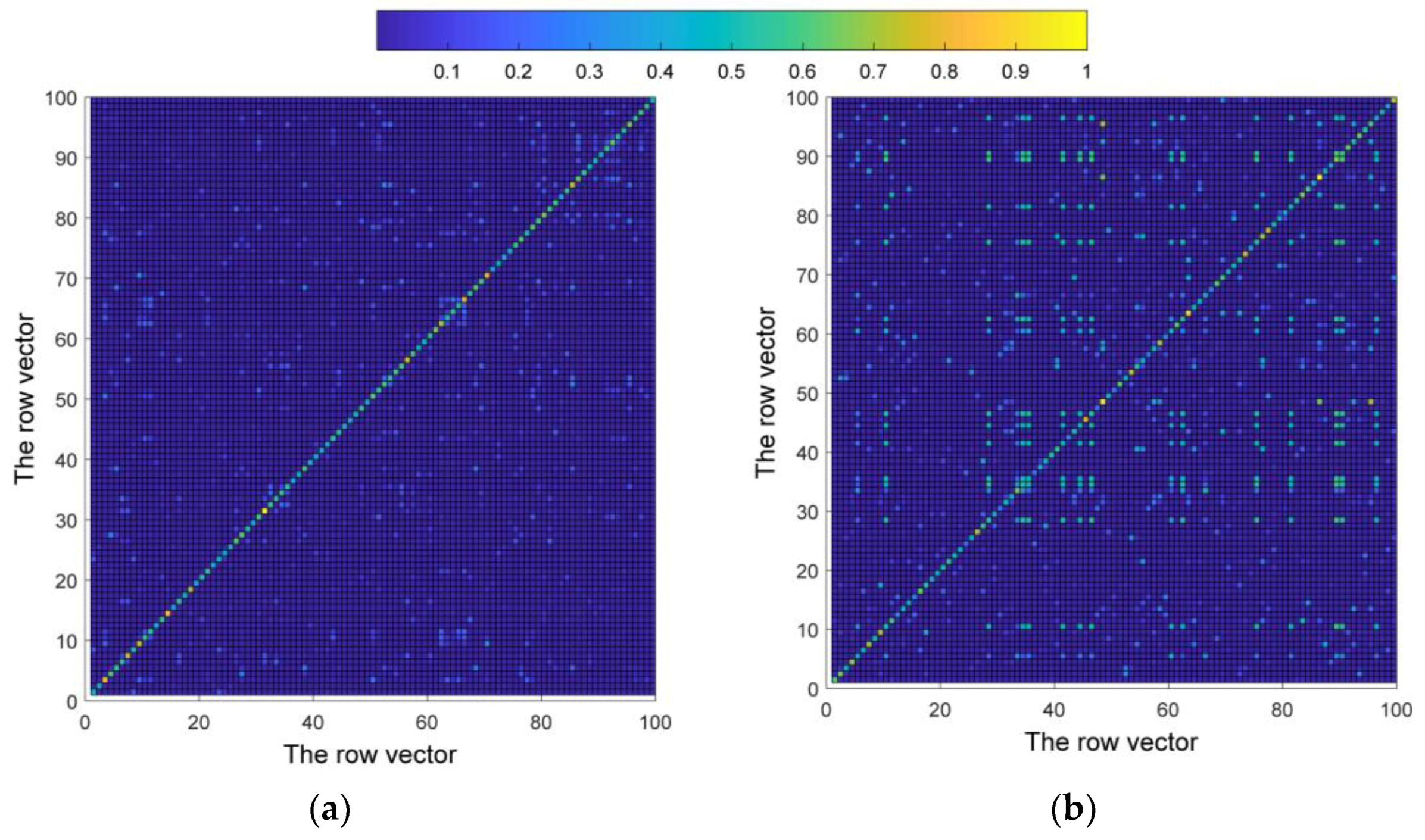
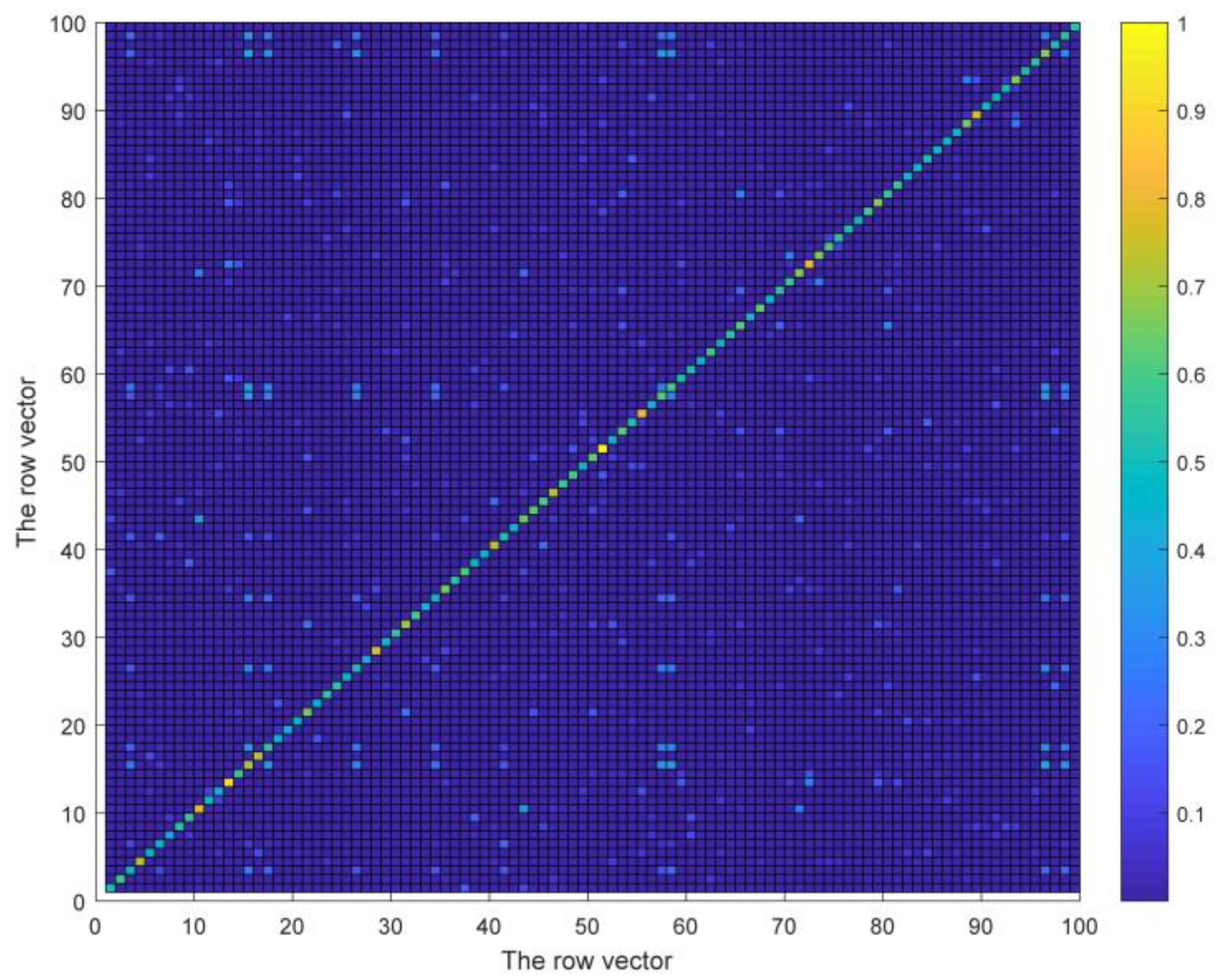
- The phenomenon known as non-monotonicity in this paper is explained as overfitting, which results from row vectors of weight matrix which are not orthogonal.
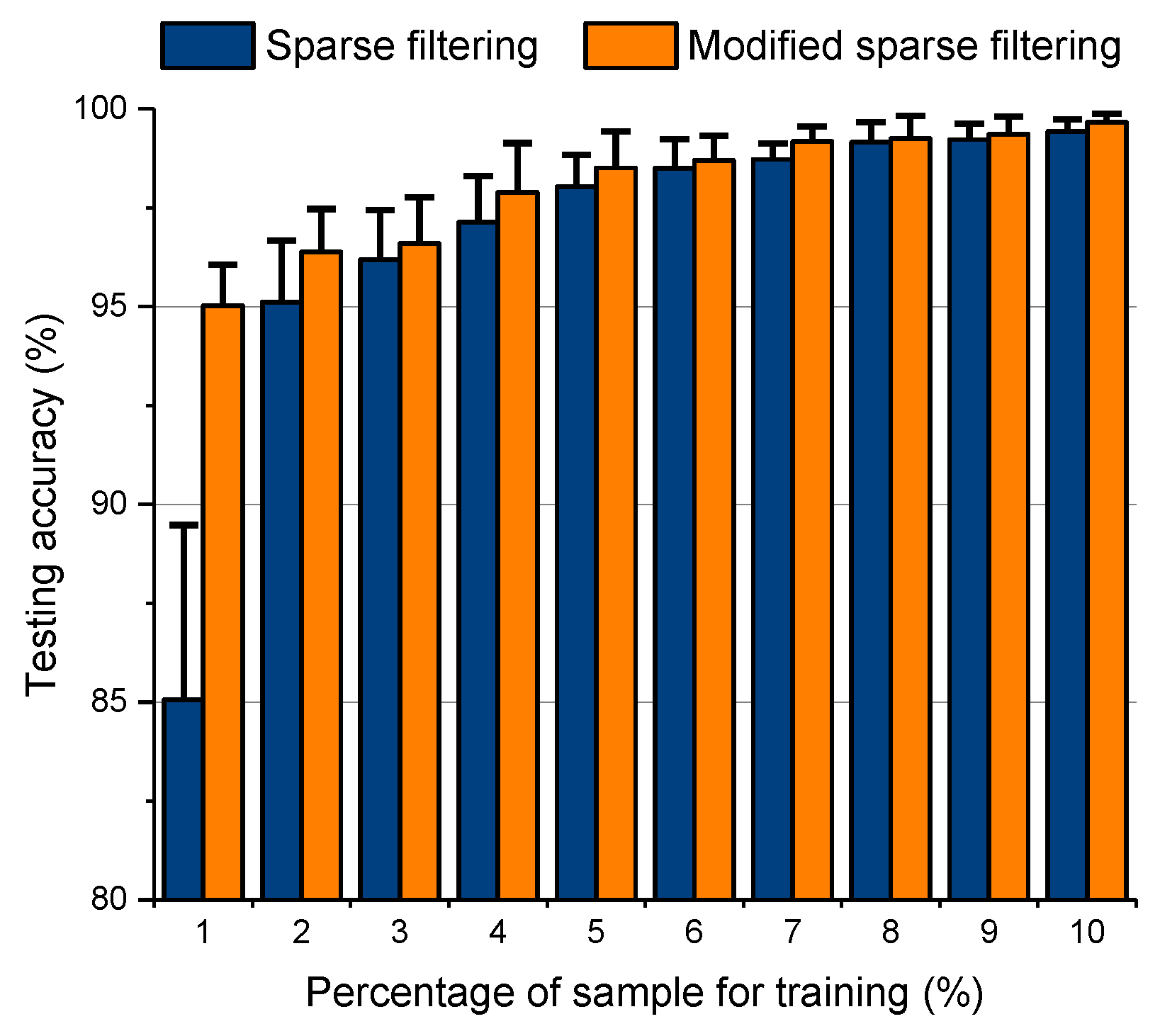
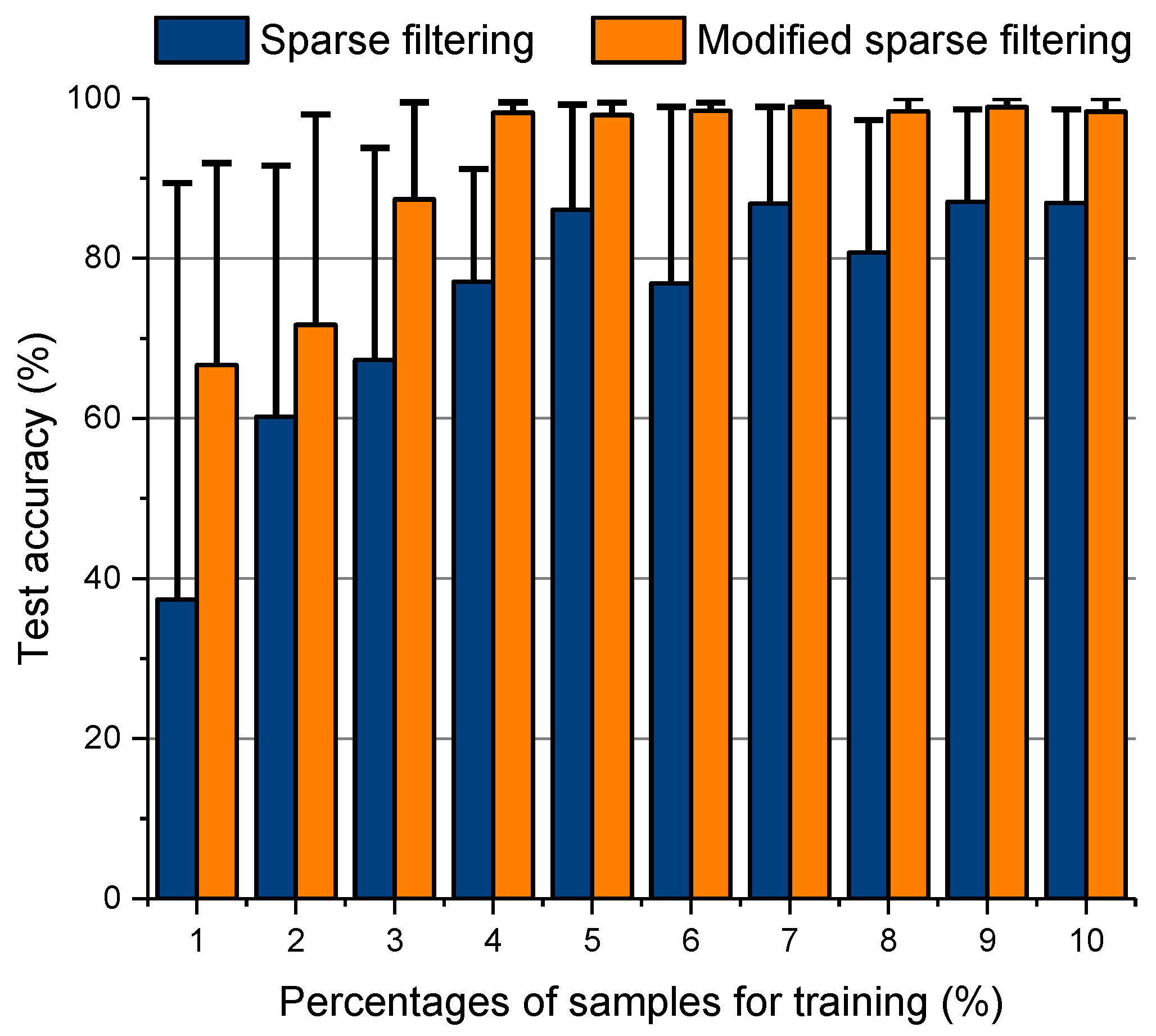
- The modified sparse filtering with a constraint term in the cost function can effectively handle the overfitting problem and eliminate the multi-correlation of the weight matrix.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Lu, S.; He, Q.; Dai, D.; Kong, F. Periodic fault signal enhancement in rotating machine vibrations via stochastic resonance. J. Vib. Control 2016, 22, 4227–4246. [Google Scholar] [CrossRef]
- Yin, S.; Li, X.; Gao, H.; Kaynak, O. Data-based techniques focused on modern industry: An overview. IEEE Trans. Ind. Electron. 2015, 62, 657–667. [Google Scholar] [CrossRef]
- Raj, A.S.; Murali, N. A novel application of lucy–richardson deconvolution: Bearing fault diagnosis. J. Vib. Control 2013, 21, 1055–1067. [Google Scholar] [CrossRef]
- He, Q.; Ding, X. Sparse representation based on local time–frequency template matching for bearing transient fault feature extraction. J. Sound Vib. 2016, 370, 424–443. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar] [CrossRef]
- Guo, L.; Gao, H.; Huang, H.; He, X.; Li, S. Multifeatures fusion and nonlinear dimension reduction for intelligent bearing condition monitoring. Shock Vib. 2016, 2016, 4632562. [Google Scholar] [CrossRef]
- Liu, H.; Li, L.; Ma, J. Rolling bearing fault diagnosis based on stft-deep learning and sound signals. Shock Vib. 2016, 2016, 6127479. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Zhao, J. Bearing fault diagnosis of a permanent magnet synchronous motor via a fast and online order analysis method in an embedded system. Mech. Syst. Signal Process. 2017. [Google Scholar] [CrossRef]
- Sun, W.; An Yang, G.; Chen, Q.; Palazoglu, A.; Feng, K. Fault diagnosis of rolling bearing based on wavelet transform and envelope spectrum correlation. J. Vib. Control 2012, 19, 924–941. [Google Scholar] [CrossRef]
- Sinha, J.K.; Elbhbah, K. A future possibility of vibration based condition monitoring of rotating machines. Mech. Syst. Signal Process. 2013, 34, 231–240. [Google Scholar] [CrossRef]
- Ciabattoni, L.; Ferracuti, F.; Freddi, A.; Monteriu, A. Statistical spectral analysis for fault diagnosis of rotating machines. IEEE Trans. Ind. Electron. 2018, 65, 4301–4310. [Google Scholar] [CrossRef]
- Cong, F.; Chen, J.; Dong, G.; Pecht, M. Vibration model of rolling element bearings in a rotor-bearing system for fault diagnosis. J. Sound Vib. 2013, 332, 2081–2097. [Google Scholar] [CrossRef]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Yang, J.; Zhang, T. Deep model based domain adaptation for fault diagnosis. IEEE Trans. Ind. Electron. 2017, 64, 2296–2305. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Wang, J.; Mao, K. Learning to monitor machine health with convolutional bi-directional lstm networks. Sensors 2017, 17, 273. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Kurfess, T.R.; Liang, S.Y. Stochastic prognostics for rolling element bearings. Mech. Syst. Signal Process. 2000, 14, 747–762. [Google Scholar] [CrossRef]
- Liu, R.; Yang, B.; Zio, E.; Chen, X. Artificial intelligence for fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2018, 108, 33–47. [Google Scholar] [CrossRef]
- Paya, B.A.; Esat, I.; Badi, M. Artificial neural networks based fault diagnosis of rotating machinery using wavelet transforms as a preprocessor. Mech. Syst. Signal Process. 1997, 11, 751–765. [Google Scholar] [CrossRef]
- Rafiee, J.; Arvani, F.; Harifi, A.; Sadeghi, M.H. Intelligent condition monitoring of a gearbox using artificial neural network. Mech. Syst. Signal Process. 2007, 21, 1746–1754. [Google Scholar] [CrossRef]
- Liao, L.; Jin, W.; Pavel, R. Enhanced restricted boltzmann machine with prognosability regularization for prognostics and health assessment. IEEE Trans. Ind. Electron. 2016, 63, 7076–7083. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Measurement 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional neural network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Lei, Y.; Zuo, M.J. Gear crack level identification based on weighted k nearest neighbor classification algorithm. Mech. Syst. Signal Process. 2009, 23, 1535–1547. [Google Scholar] [CrossRef]
- Ngiam, J.; Koh, P.; Chen, Z.; Bhaskar, S.; Ng, A.Y. Sparse filtering. In Proceedings of the International Conference on Neural Information Processing Systems, Shanghai, China, 13–17 November 2011; pp. 1125–1133. [Google Scholar]
- Zennaro, F.M.; Chen, K. Towards understanding sparse filtering: A theoretical perspective. Neural Netw. 2018, 98, 154–177. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Jin, L.; Tao, D.; Zhang, S.; Zhang, X. Single-layer unsupervised feature learning with l2 regularized sparse filtering. In Proceedings of the IEEE China Summit & International Conference on Signal & Information Processing, Xi’an, China, 9–13 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 475–479. [Google Scholar]
- Dong, Z.; Pei, M.; He, Y.; Liu, T.; Dong, Y.; Jia, Y. Vehicle type classification using unsupervised convolutional neural network. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 172–177. [Google Scholar]
- Wang, J.; Li, S.; Jiang, X.; Cheng, C. An automatic feature extraction method and its application in fault diagnosis. J. Vibroeng. 2017, 19, 2521–2533. [Google Scholar]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An intelligent fault diagnosis method using unsupervised feature learning towards mechanical big data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Zhao, C.; Feng, Z. Application of multi-domain sparse features for fault identification of planetary gearbox. Measurement 2017, 104, 169–179. [Google Scholar] [CrossRef]
- Jiang, G.-Q.; Xie, P.; Wang, X.; Chen, M.; He, Q. Intelligent fault diagnosis of rotary machinery based on unsupervised multiscale representation learning. Chin. J. Mech. Eng. 2017, 30, 1314–1324. [Google Scholar] [CrossRef]
- Yang, Y.; Xiao, P.; Cheng, Y.; Zhang, X. Sparse filtering based intelligent fault diagnosis using ipso-svm. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 7388–7393. [Google Scholar]
- Smith, E.C.; Lewicki, M.S. Efficient auditory coding. Nature 2006, 439, 978–982. [Google Scholar] [CrossRef] [PubMed]
- Loparo, K. Case Western Reserve University Bearing Data Center. Available online: http://csegroups.case.edu/bearingdatacenter/pages/12k-drive-end-bearing-fault-data (accessed on 15 July 2013).
- Masson, G.; Busettini, C.; Miles, F. Vergence eye movements in response to binocular disparity without depth perception. Nature 1997, 389, 283–286. [Google Scholar] [CrossRef] [PubMed]
- Maaten, L.V.D.; Hinton, G. Visualizing data using t-sne. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Name | Teeth Number | Gear Modulus (mm) | Gear Pressure Angle (°) | Gear Material |
|---|---|---|---|---|
| Pinion gear | 55 | 2 | 20 | S45C |
| Wheel gear | 75 | 2 | 20 | S45C |
| Speed | Type-1 | Type-2 | Type-3 | Type-4 | Type-5 |
|---|---|---|---|---|---|
| Speed1 (rpm) | 800 | 825 | 834 | 812 | 822 |
| Speed2 (rpm) | 820 | 849 | 850 | 842 | 845 |
| Speed3 (rpm) | 852 | 864 | 866 | 860 | 861 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, Z.; Li, S.; Wang, J.; Qian, W.; Wu, Q. An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation. Appl. Sci. 2018, 8, 906. https://doi.org/10.3390/app8060906
An Z, Li S, Wang J, Qian W, Wu Q. An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation. Applied Sciences. 2018; 8(6):906. https://doi.org/10.3390/app8060906
Chicago/Turabian StyleAn, Zenghui, Shunming Li, Jinrui Wang, Weiwei Qian, and Qijun Wu. 2018. "An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation" Applied Sciences 8, no. 6: 906. https://doi.org/10.3390/app8060906
APA StyleAn, Z., Li, S., Wang, J., Qian, W., & Wu, Q. (2018). An Intelligent Fault Diagnosis Approach Considering the Elimination of the Weight Matrix Multi-Correlation. Applied Sciences, 8(6), 906. https://doi.org/10.3390/app8060906