1. Introduction
The gear train is the most widely-used power transmission system, providing torque from rotary motion to other devices. The gear train’s most common use is in motor vehicles, such as automobiles, aeronautic vehicles, heavy equipment, and agricultural machines. The first step in the gearbox design process is to determine the macro-geometry of the gears, including the normal module, number of gear teeth, pressure angle, helix angle, face width, and center distance. The next step is to predict the gear mesh misalignment by considering the elastic stiffness of the shaft, bearing, and housing under a quasi-static condition [
1,
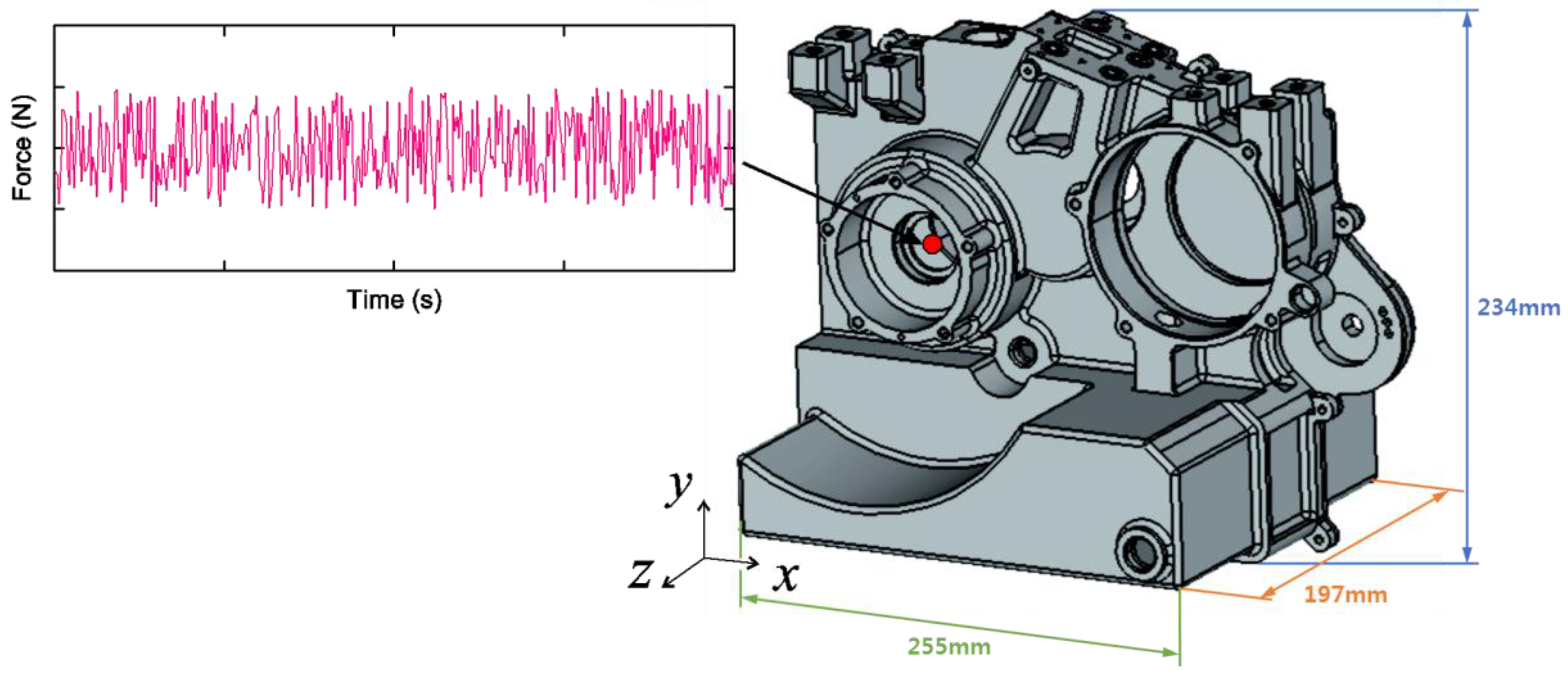
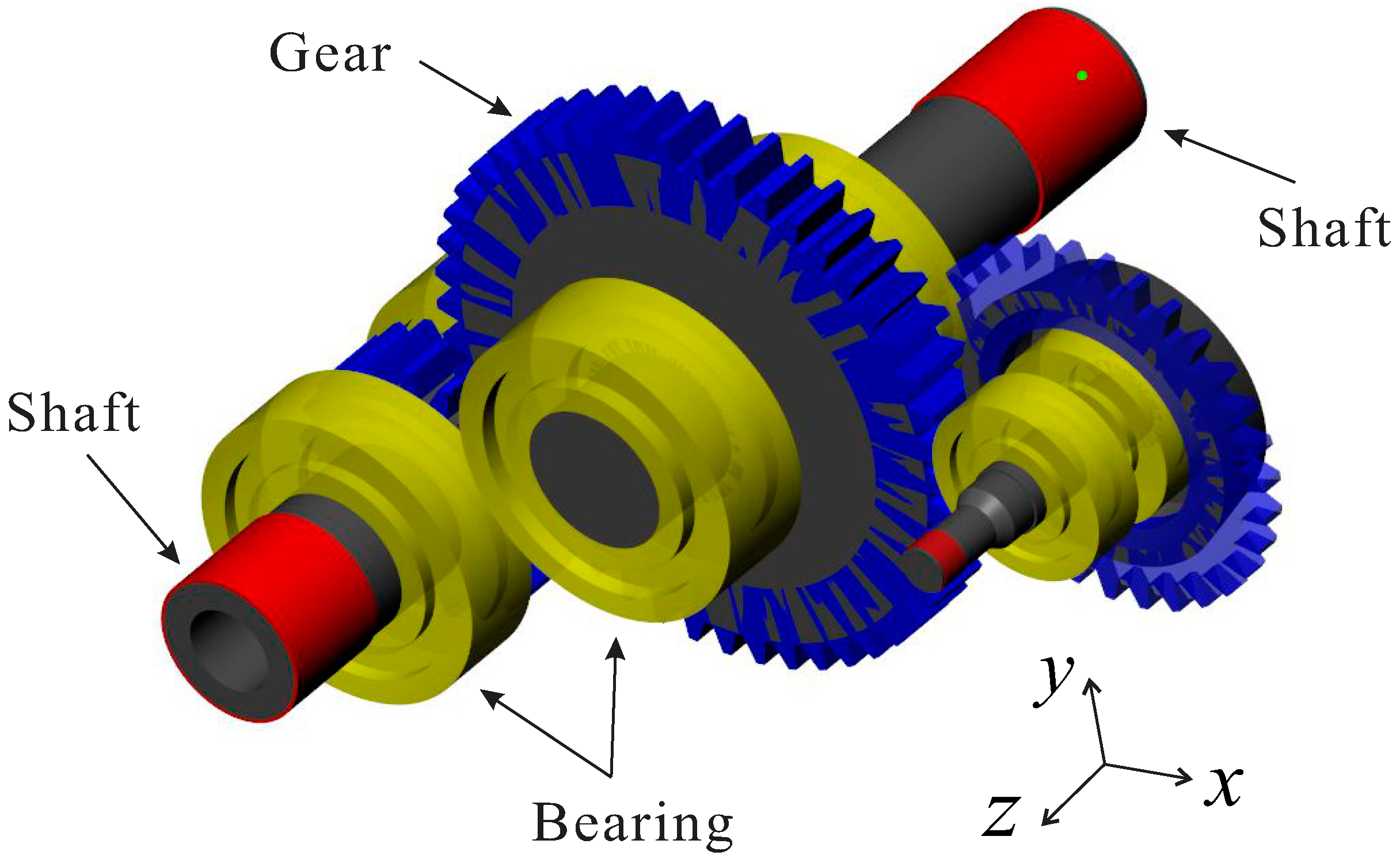
2]. However, the gear train is fundamentally a rotating machine, and, therefore, gears in the general operating condition cause dynamic loadings that are transmitted from the bearings to the housing structure. This causes time-varying interactions among the gearbox components, as can be seen in
Figure 1. Therefore, the dynamic response of a geared rotor-bearing system should be considered for precise gear train design and analysis. Such designs have been studied extensively [
3,
4,
5,
6,
7,
8].
Recently, considering the housing stiffness has become recognized as important for controlling the gear train’s noise and vibration due to the use of lightweight gearbox housings in various vehicle industries for improved fuel efficiency. In such cases, various design codes encourage dynamic analysis to support the gearbox design procedure; however, such analyses incur heavy computational costs. Therefore, the initial steps, such as determining the macro- and micro-geometries of the gears and computing the gear mesh misalignment, generally continue to be performed under the static condition [
9,
10,
11,
12,
13,
14,
15,
16,
17].
As a potential solution to this problem, we propose introducing a dynamic stiffness component that considers the relevant elastic and kinetic energies. This enables compensation of the dynamic features of the mechanical components in the quasi-static analysis. Under harmonic excitation, we can simply separate spatial and temporal variables in the dynamic equations of motion and compute the dynamic stiffness of the gearbox components as a quasi-static analysis. We can then compute the dynamic gear mesh misalignment and transmission error following the standard gear design procedure by simply replacing the static stiffness with the dynamic stiffness. Numerical investigations demonstrate that this simple modification of the typical gear design procedure can produce relevant differences in the gear mesh misalignment. We emphasize that the aim of this work is not a noise, vibration, and harshness (NVH) analysis, but rather a consideration of the dynamic stiffness effect in the conventional gear design process under a quasi-static condition.
Among the mechanical components, modeling the housing structure with the finite element (FE) method generally requires several numerical treatments. First, the degrees of freedom (DOFs) of the housing mesh surfaces where the bearings are located must be connected to the center of gravity of the bearing using rigid body elements (RBEs), which are also known as multi-point constraints [
18,
19,
20,
21]. In addition, simplifying the dynamic model of the FE housing, which has a tremendous number of DOFs, requires the use of reduced-order modeling (ROM) techniques [
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33]. Component mode synthesis (CMS) is currently the most popular ROM technique for dynamic systems [
26,
27,
28,
29,
30,
31]. The typical CMS method uses a small number of important and constraint modes to construct a reduced model that mathematically projects the displacement fields of the gearbox components onto modal coordinates. Thus, the accuracy level of the reduced system can be adjusted by adding (or eliminating) the desired number of modes. However, such modal projections require additional numerical treatments for application to the typical gear design process. To address this problem most efficiently, we use a Guyan reduction. This is a representative direct nodal condensation technique [
23] that allows that the reduced matrices are only condensed into the physical coordinates, which means that the reduced matrices of Guyan reduction only have degrees of freedom (DOFs) related with the bearing center in the gearbox model.
In the following sections, we first introduce the gear design process and the formulations of the dynamic stiffness, including the reduced-order modeling. We then propose a numerical process of integrated gear design that considers the dynamic stiffness, and we investigate the effect of dynamic stiffness on gear mesh misalignment using a two-stage parallel gearbox example.
2. Summary of the Gearbox Design Process
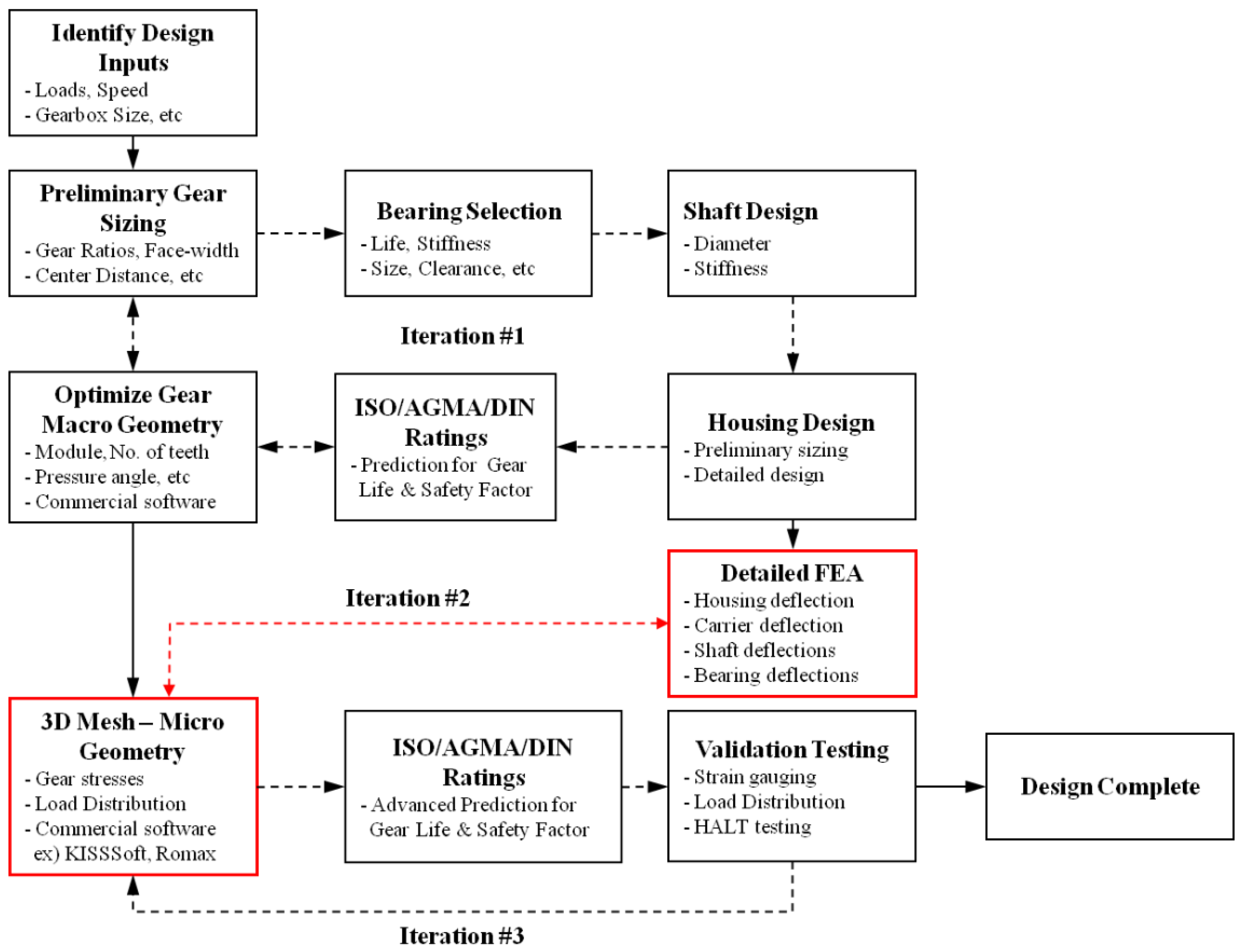
An optimal gearbox design process requires various advanced methods and iteration procedures, as can be seen in
Figure 2. In the first step, a preliminary gear sizing is performed to meet the specified design requirements for the gearbox. Design parameters relevant to the size of the gearbox, such as the gear ratio, center distance, and gear face width, can be determined in this step.
In the second step, the gear macro-geometry is determined, including the normal module, number of gear teeth, pressure angle, helix angle, and profile shift coefficient, all of which are based on gear rating standards [
10,
11,
12,
13,
14]. Bearings that can support the required gear loads are then selected, and shaft and housing are designed based on the gear macro-geometry.
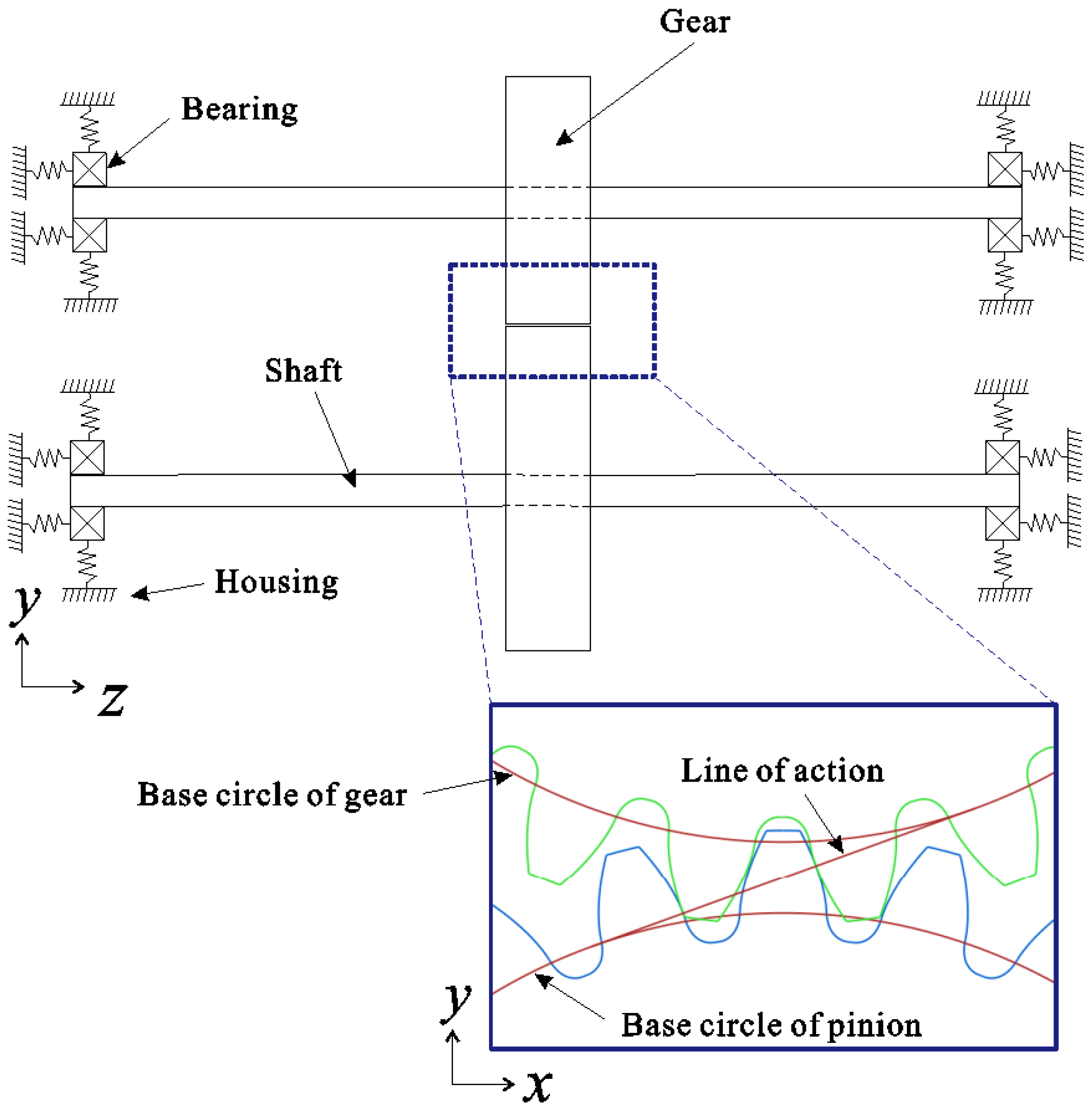
In the third step, the gear micro-geometry is determined, including the tip and root relief, lead slope, and crowning; these are based on the load distribution and transmission error analysis. Gear mesh misalignment between the meshed gears is a leading factor in the gear strength analysis, and the misalignment is iteratively computed using the shaft deflection and bearing deformation. The misalignment is then converted to displacement along the line of action on the gear mesh, as shown in
Figure 3. A smaller mesh misalignment represents a more uniform load distribution on the gear mesh. The gear mesh misalignment in the line of action direction (
Figure 3) is defined as:
in which
is the gear mesh misalignment;
is the face width;
is the angle of gear mesh misalignment;
is the working transverse pressure angle; and
and
are the angles of gear skew and slope, respectively.
From this gear mesh misalignment, we can compute the face load factor for contact stress which accounts for the effect of the load distribution over the face width on the gear contact stress. The definition of the face load factor is:
where
is the face load factor, and
and
are the load at an arbitrary position of the tooth flank and the mean (average) load at the reference circle, respectively [
10]. In engineering practice, the face load factor is computed as:
and then the effective gear mesh misalignment, denoted as
, is defined as:
where
is the mean value of the mesh stiffness per unit face width, and
is the running-in allowance for a gear pair.
The gear mesh misalignment causes non-uniform load distribution along the face width in the plane of action, possibly resulting from gear elastic deflection, housing flexibility, and bearing deformation. As the most important factor in the gear strength rating, the face load factor must be equal to or greater than 1.0. A value of 1.0 is assumed to indicate that loads acting on gear tooth flanks are evenly distributed. As the value increases above 1.0, the load distribution on the gear tooth flanks becomes increasingly uneven [
1,
2]. This iteration procedure corresponds to
Iteration #2 in the overall gear design process shown in
Figure 2.
3. Gear Train Modeling Process with Dynamic Stiffness
This section presents the reduced-order modeling procedure for the gear train structure and introduces the definition of dynamic stiffness. Among the gear train components, the gears and bearings have been simply modeled using analytical and empirical techniques. However, the shaft and housing structural components are modeled using the finite element (FE) method. In particular, the FE method is the most popular approach to modeling housing structures with arbitrary and complicated geometries, and the approach is applied here via RomaxDESIGNER (R17) and KISSsoft (2017). This is the most popular gearbox design and analysis software used to consider the elastic behavior of the gearbox components in the design process [
5,
18,
19].
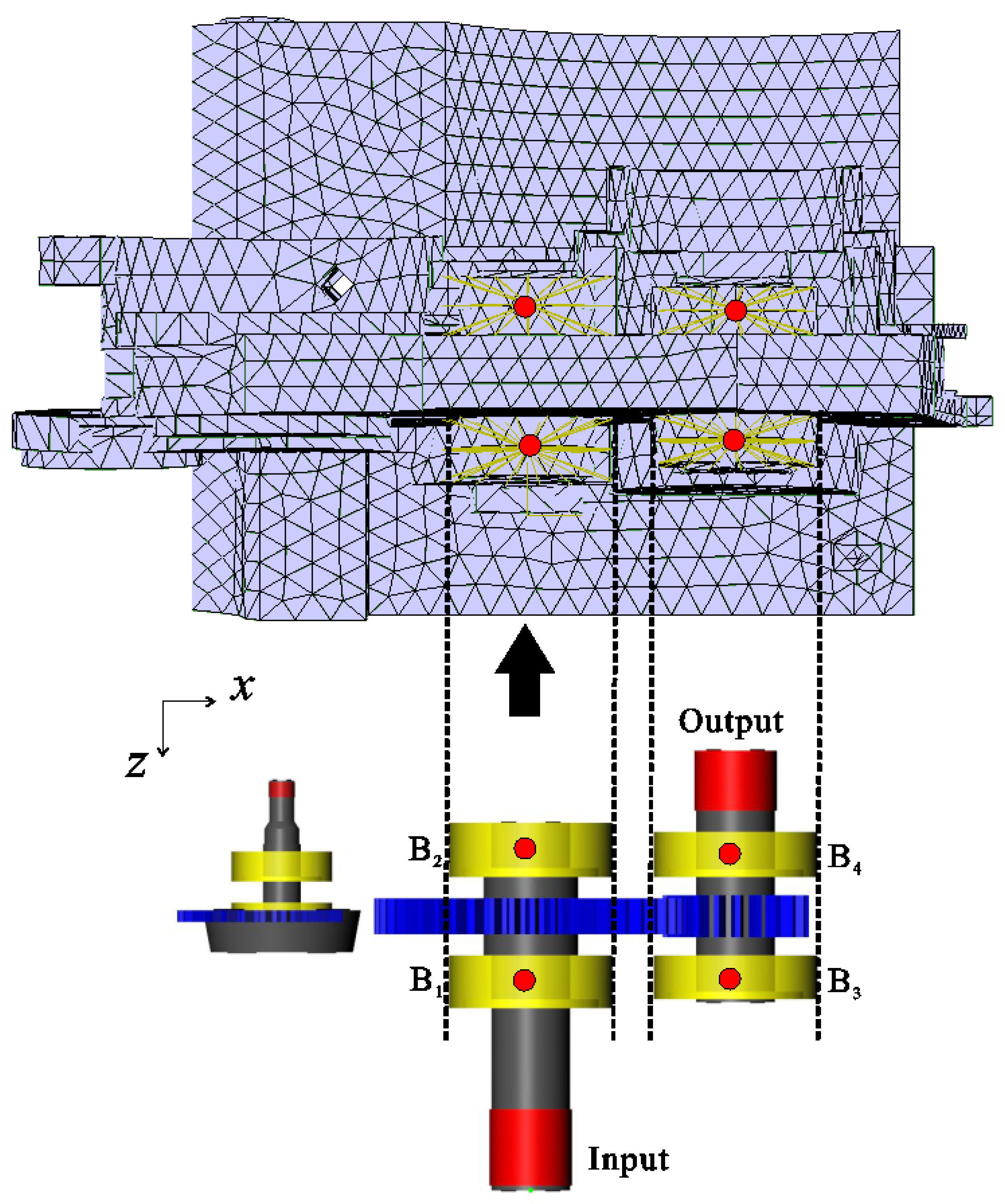
Before modeling the FE housing, the initial positions of bearing center are first determined within the rigid body assumption (
Figure 3) as:
where
is the initial position vector of the bearings,
is the initial position of the
th bearing, and
denotes the number of bearings (variables associated with bearings are denoted by the subscript
). The bearing center plays an important role in connecting the gearbox components, including the shaft, bearings, gears, and housing.
Using the initial position
within the quasi-static condition, the following initial reaction forces of the bearings are computed as:
where
is the initial reaction force vector of the bearings;
is the initial reaction force of the
th bearing; and
and
are the force and torque (moment) components, respectively. The initial reaction force,
, is then loaded into the gear train model at the initial bearing center,
, and the gear train deformation can be computed in the quasi-static condition. The bearing center is then updated according to the gear train deformation, which means that the bearing reaction force also changes. Therefore, the reaction force and bearing center location should be iteratively computed until these updated values are the same as the previous values of
and
. This information is required to more accurately predict and compute gear mesh misalignment.
The linear equations of motion for the housing structure are then defined as:
where
,
, and
are the mass, damping, and stiffness matrices of the FE housing structure, respectively;
,
,
, and
are the acceleration, velocity, displacement, and force vectors, respectively; and
and
are the space and time variables. Using the relations
and
with
, Equation (7) is rewritten as:
where
indicates the angular frequency (rad/s), and the dynamic stiffness, which contains the potential and kinetic energies, denoted as
to distinguish it from the static stiffness
. The angular frequency component,
, of the dynamic stiffness is an unknown variable, and depends on the critical speed of the gear drivetrain under the operation conditions.
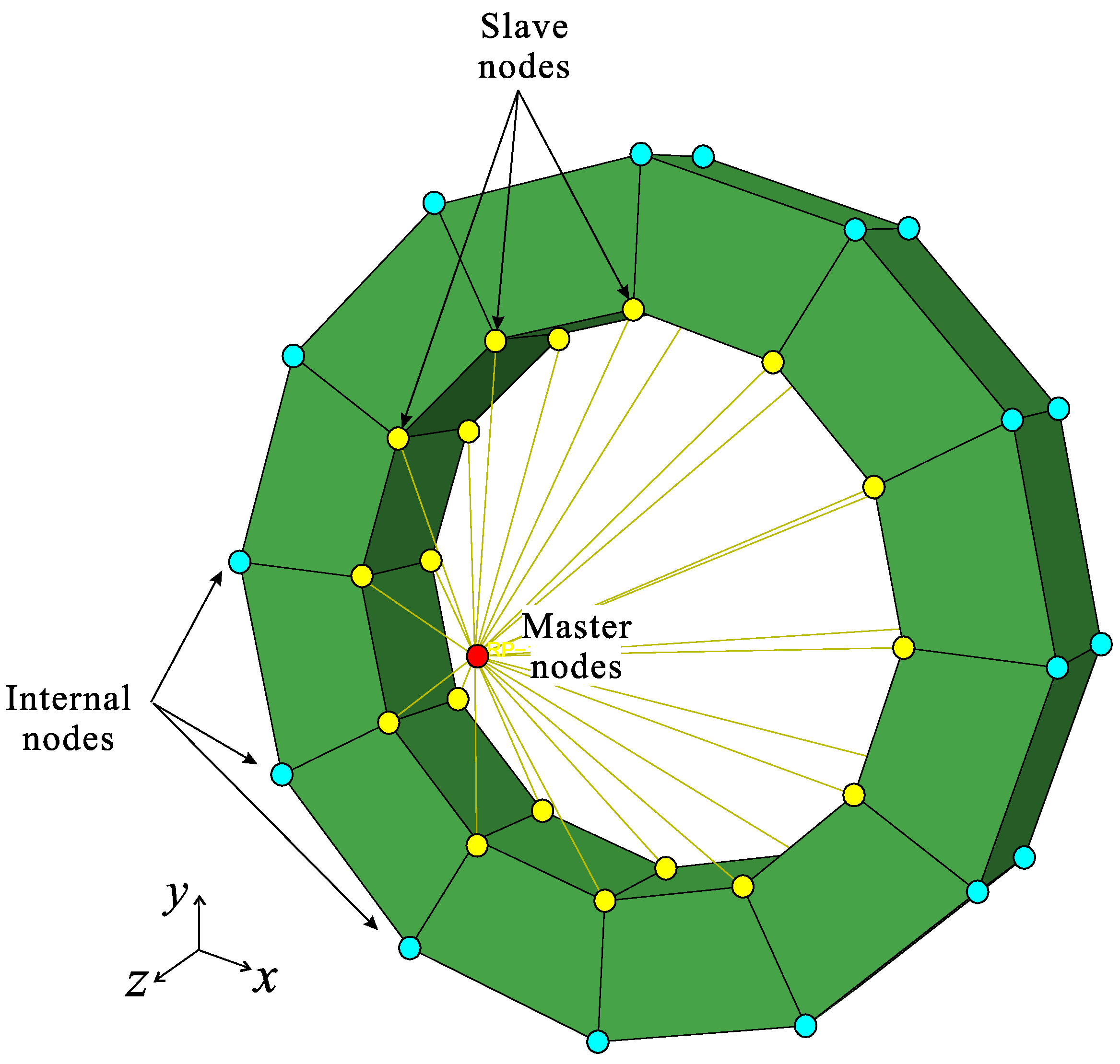
The housing structure is typically connected to the bearing center using a rigid body element (RBE), which is also known as a multipoint constraint [
18,
19,
20,
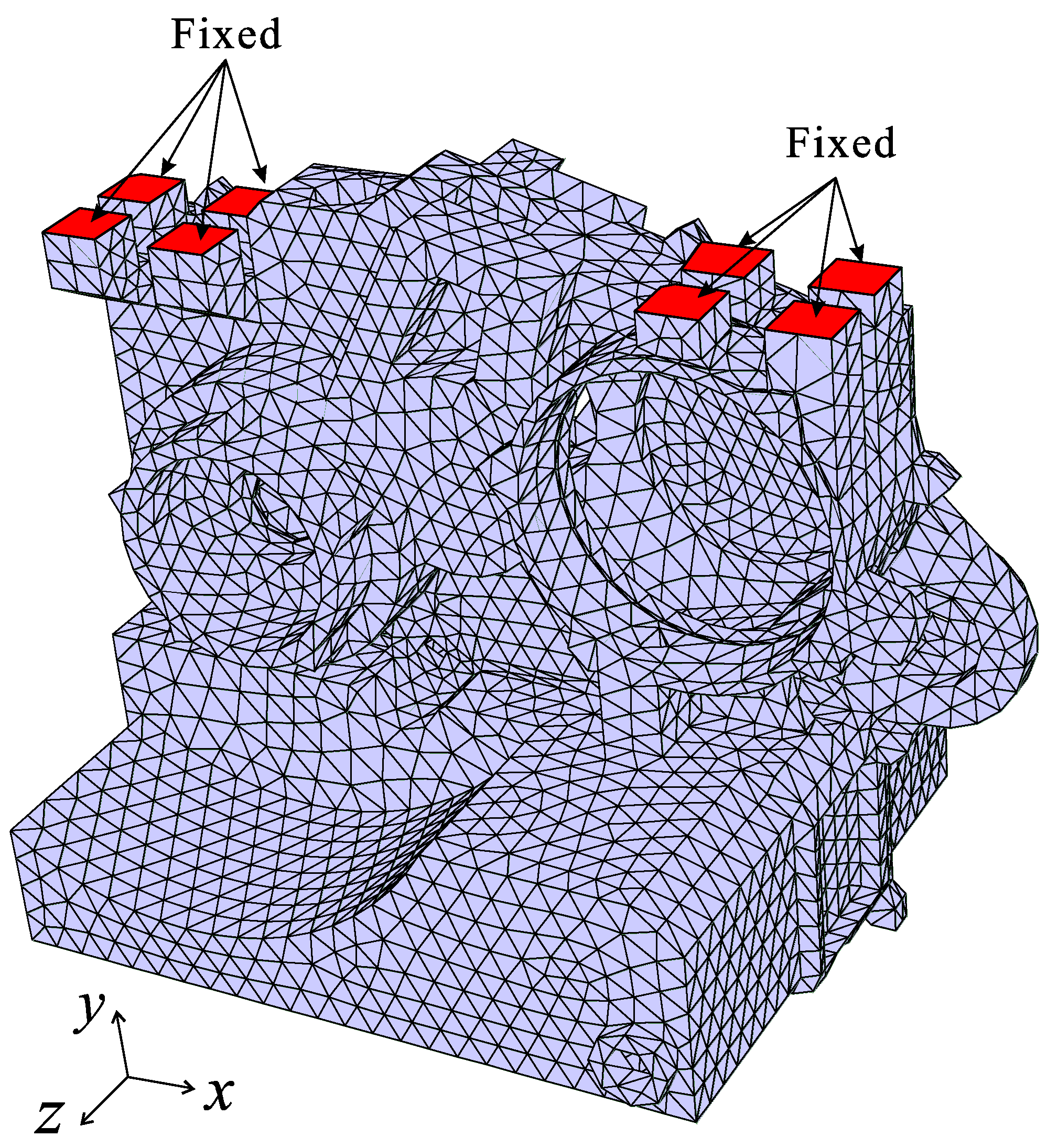
21]. Here, we use a conventional RBE formulation with the displacement constraints between master and slave DOFs determined by the master-slave, Lagrange multiplier, and penalty methods. In the master-slave method, DOFs are separated among internal, slave, and master nodes, as shown in
Figure 4. In this case, the DOFs at the bearing centers are defined as masters, the DOFs constrained to the master DOF are slaves, and the other DOFs are internal. The components of Equation (8), except for the damping matrix, can then be rewritten as
in which the internal, slave, and master DOFs are denoted by the subscripts
,
, and
, respectively. Here, we define a certain transformation matrix
as
(
). When we define the number of DOFs of the model as
, the numbers of the internal, slave, and master DOFs can be denoted as
,
, and
, respectively, and these typically have the following relation:
and
.
The master DOFs are typically independent, and the slave DOFs are physically dependent on the master DOFs. Considering these constraints, the slave DOFs can be presented using the Boolean matrix
as:
The Boolean matrix,
, is a
by
rectangular matrix. Using Equation (10), the displacement vector,
, is then transformed into the modified vector,
, by eliminating the slave DOFs:
where
is a transformation matrix, and
is an identity matrix. Using Equations (9) and (11) in Equation (8), we obtain the following modified matrices:
and these component matrices are then defined as:
This is a typical modeling result for an FE housing with RBEs.
Projecting the internal DOFs into the master DOFs at the bearing centers is the next step towards considering the housing effect in the gearbox design process. Using Equations (12) to (14), the linear static equations, which include
, can be specifically presented as:
With the assumption of
, the well-known static constraint modes can be derived as:
where
is a matrix of the static constraint modes that connects the internal DOFs (
) and the master DOFs (
) [
22,
23]. This connection is valid only for
, which implies that the external forces at the bearing center are dominant.
Using Equation (16), the modified displacement vector,
, can be presented simply by the master DOFs as:
Therefore, the mass and stiffness matrices in Equation (12) can be projected using
, as:
and can be detailed as:
The condensed matrices, and , are by matrices. The master DOFs, , represent the bearing DOFs, which generally consist of six DOFs with three translations () and three rotations (). Therefore, is defined as ().
The reduced matrices in Equation (19) are then represented as:
As an example, when the gearbox housing has four bearings (
), the size of the reduced matrices in Equation (20) are 24 by 24, and then the block diagonal matrices,
and
, which are the mass and stiffness matrices of the
bearing, are 6 by 6 matrices. Thus, the condensed matrices,
and
, may be much smaller than the mass and stiffness matrices,
and
. Using the reduced matrices, the dynamic stiffness in Equation (8) can be approximated as:
In this work, we present the reduced-order FE modeling process with the dynamic stiffness for only the housing. However, the same process can be applied to other gear train components, such as the shafts and bearings. Hence, the general form of the dynamic stiffness can be defined as:
where the subscripts
and
represent terms associated with the housing and shaft, respectively.
In the typical gear design process, only the static stiffness,
, is considered to compute the gear mesh misalignment [
5]. However, the gear train is a rotary machine, and its housing is under dynamic loading in the operating condition, which means that precise predictions of the gear train behaviors require consideration of the system’s kinetic energy along with its potential energy. Therefore, using the dynamic stiffness,
, which contains both potential and kinetic energies, is a favorable approach for modeling the gearbox housing despite the imposed quasi-static condition. In particular, because the dynamic stiffness is a function of
, its effect becomes more significant in high-speed gear trains, such as those used in electric vehicles.
4. Gear Design Process Considering the Dynamic Stiffness
Here, we introduce a numerical gear design procedure for considering dynamic stiffness. In Step 1, using static analysis, the reaction force,
, at the bearing center is computed using the gear macro- and micro-geometries. In Step 2,
, is loaded onto the housing structure at the bearing center
. We can then compute the housing deformation using the dynamic stiffness in Equation (21). We should compute the angular frequency,
(rad/s), first in Equation (21), which can be defined by the critical speed of the certain gearbox as:
in which
is the gear mesh angular frequency (rad/s),
is the gear mesh frequency (Hz),
is the gear rotating frequency (Hz),
denotes the number of gear teeth, and the subscript
indicates a term associated with the gear. The dynamic stiffness is then defined without the unknown variable as:
Using the dynamic stiffness, except for the damping term in Equation (24), the displacement of the bearing center can be computed as:
and the bearing center is also updated as:
Using the new bearing center,
, the updated reaction force,
, is computed again. This iteration procedure can stop when the following criteria are satisfied:
It implies that the bearing center and reaction force converge at certain values. Based on the results in Equation (27), the gear mesh misalignment, , in Equation (1) and the face load factor, , in Equation (3) can be computed and used in the gear design process.
A similar iteration process has been implemented in several commercialized software designs, including RomaxDesigner and KISSsoft [
5,
18,
19]. However, these implementations apply only the static stiffness,
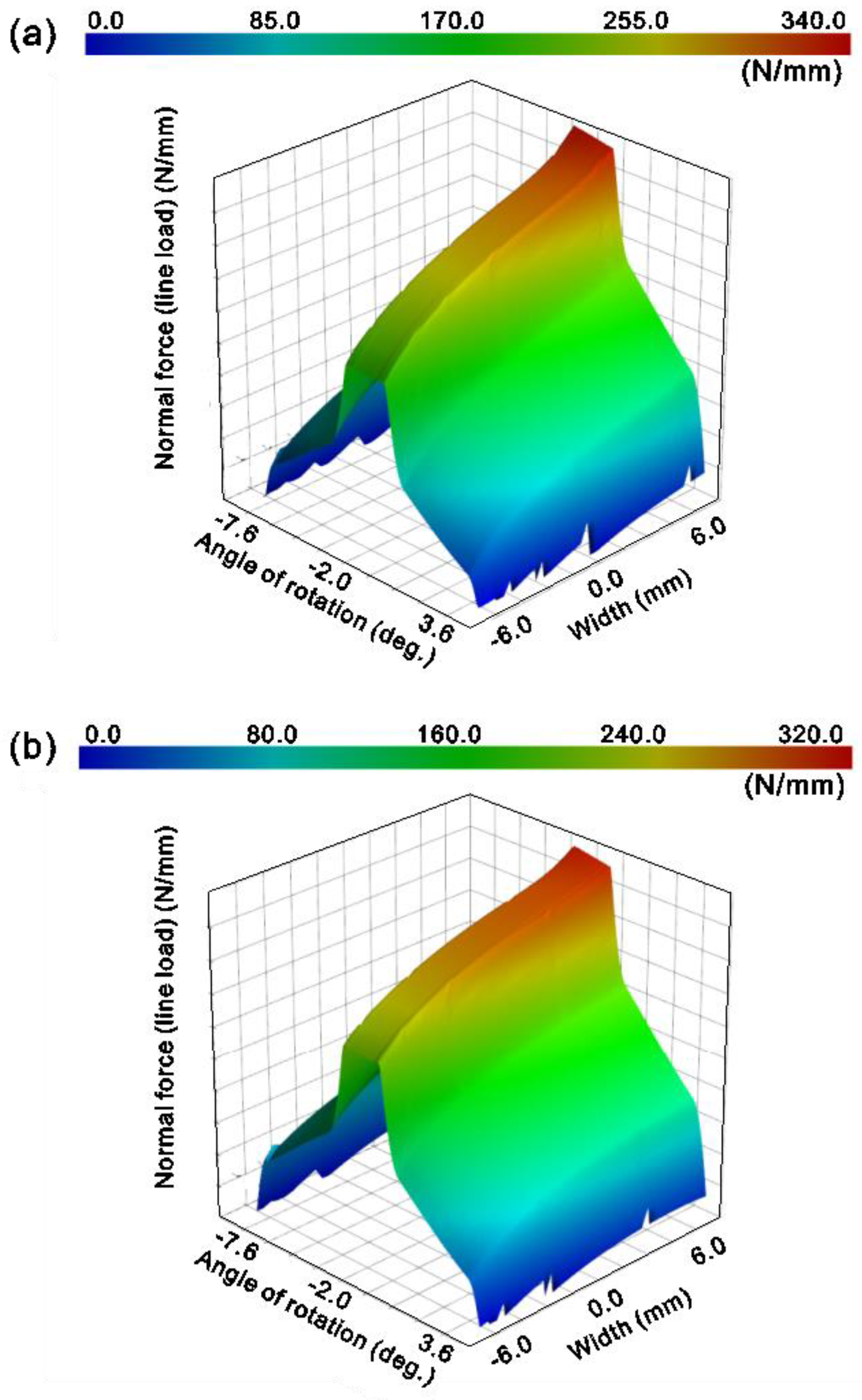
, instead of the dynamic stiffness,
. This simple idea, using the dynamic stiffness,
, can expose important differences in the gear mesh misalignment compared to the results obtained with static stiffness, as discussed in the next section.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}