Lyapunov Equivalent Representation Form of Forced, Damped, Nonlinear, Two Degree-of-Freedom Systems

 ,
,  ,
, 
Abstract
:Featured Application
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
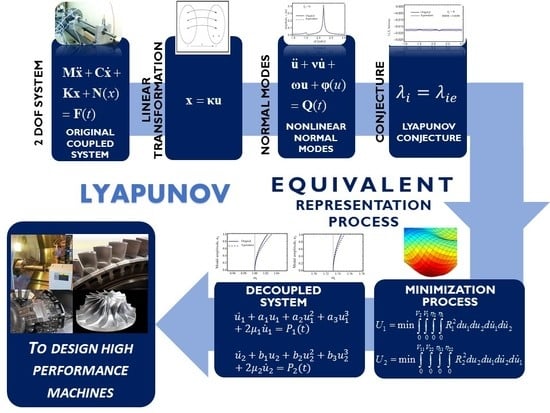
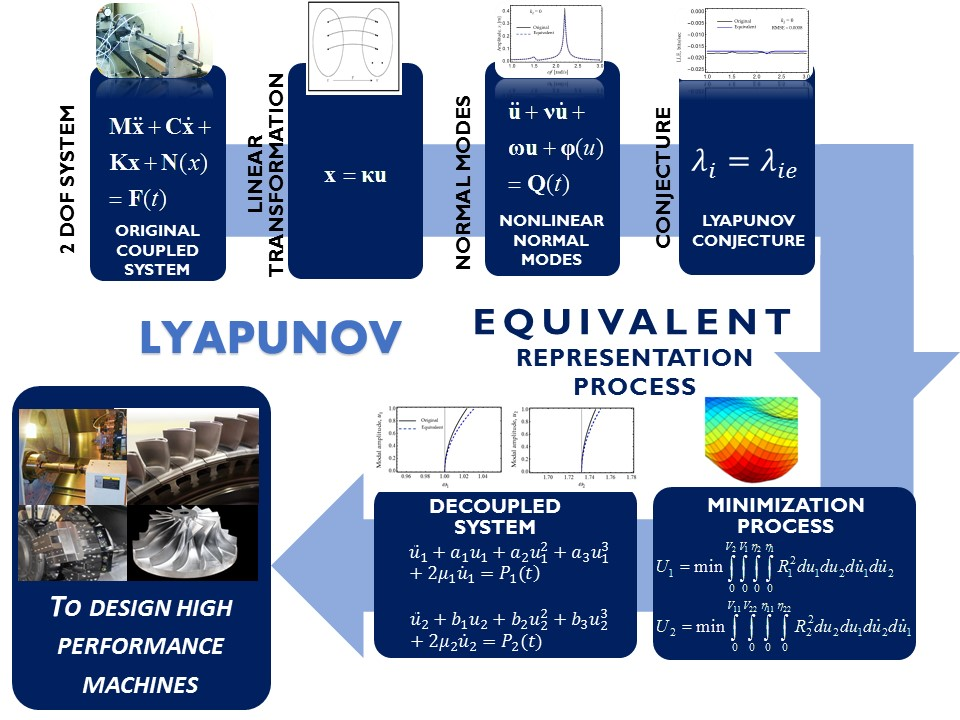
2. Transformation Technique
- (a)
- Odd terms arise in the right-hand term (RHT) of the invariant polynomial expressions of Equations (5) and (6) if the restoring forces of the dynamic system are described by an invariant odd polynomial expression.
- (b)
- If the restoring forces of the original system have mixed-parity nonlinearities, then even and odd terms arise in the RHT invariant polynomial expressions of Equations (5) and (6).
- (c)
- Velocity-dependent terms arise mainly in the RHT of the invariant polynomial expressions of Equations (5) and (6) in order to capture not only the effective trend of the system’s nonlinearities responsible for displaying amplitude-dependent nonlinear mode shapes, but also to take into account decay rate effects.
3. Determination of , , and
Computation of , , , and Values
4. Numerical Validation
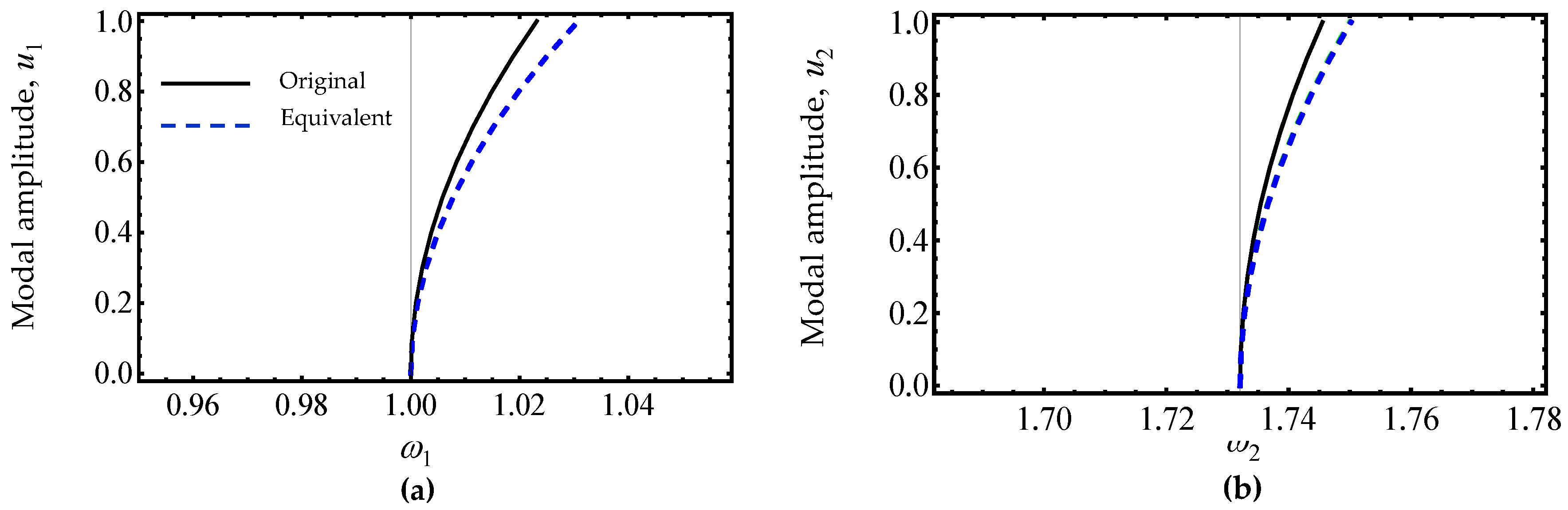
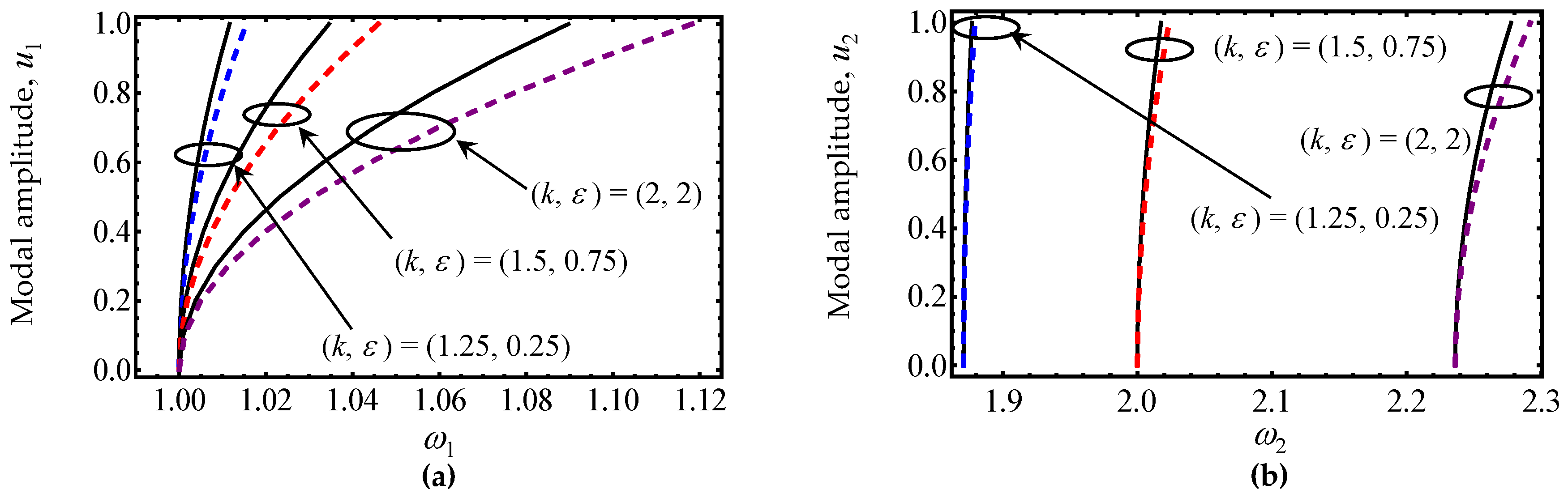
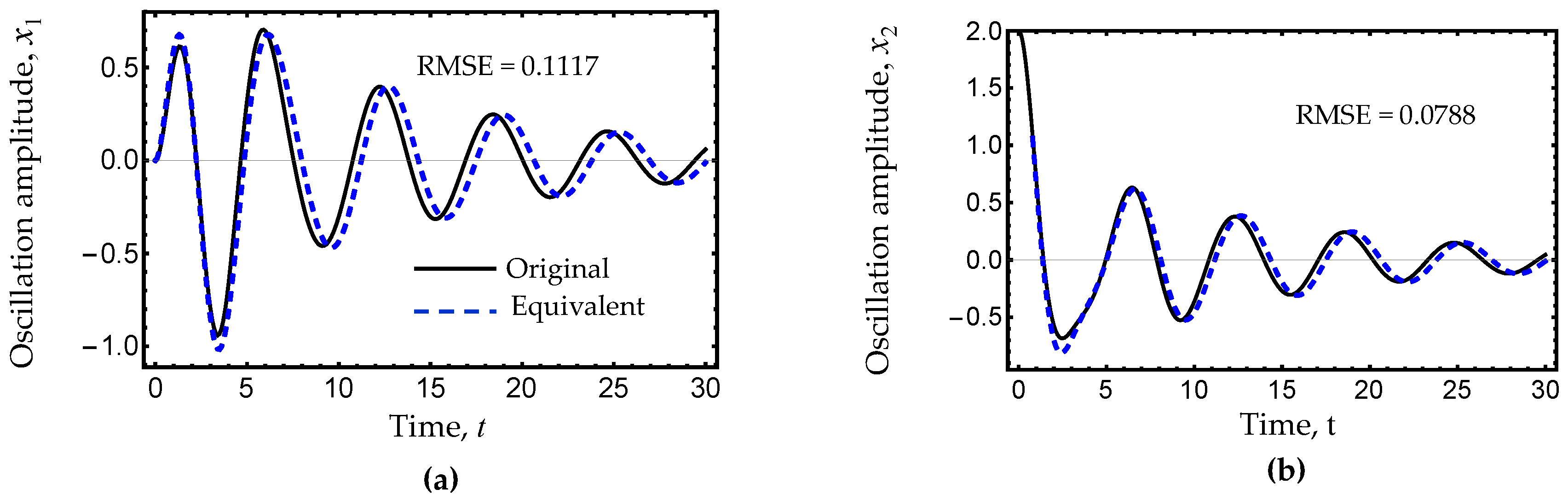
4.1. Example 1: Dynamic System with Cubic Nonlinearities
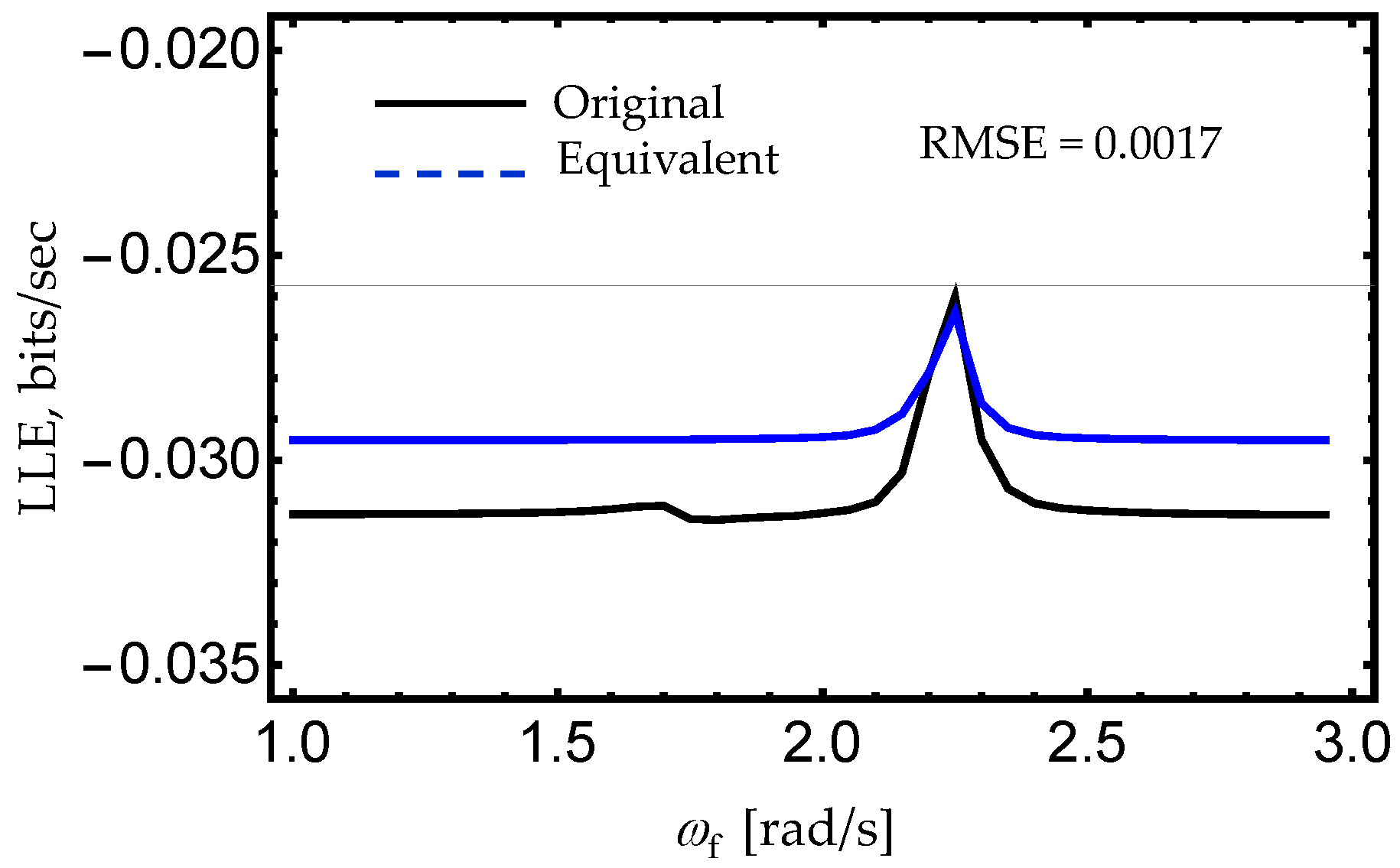
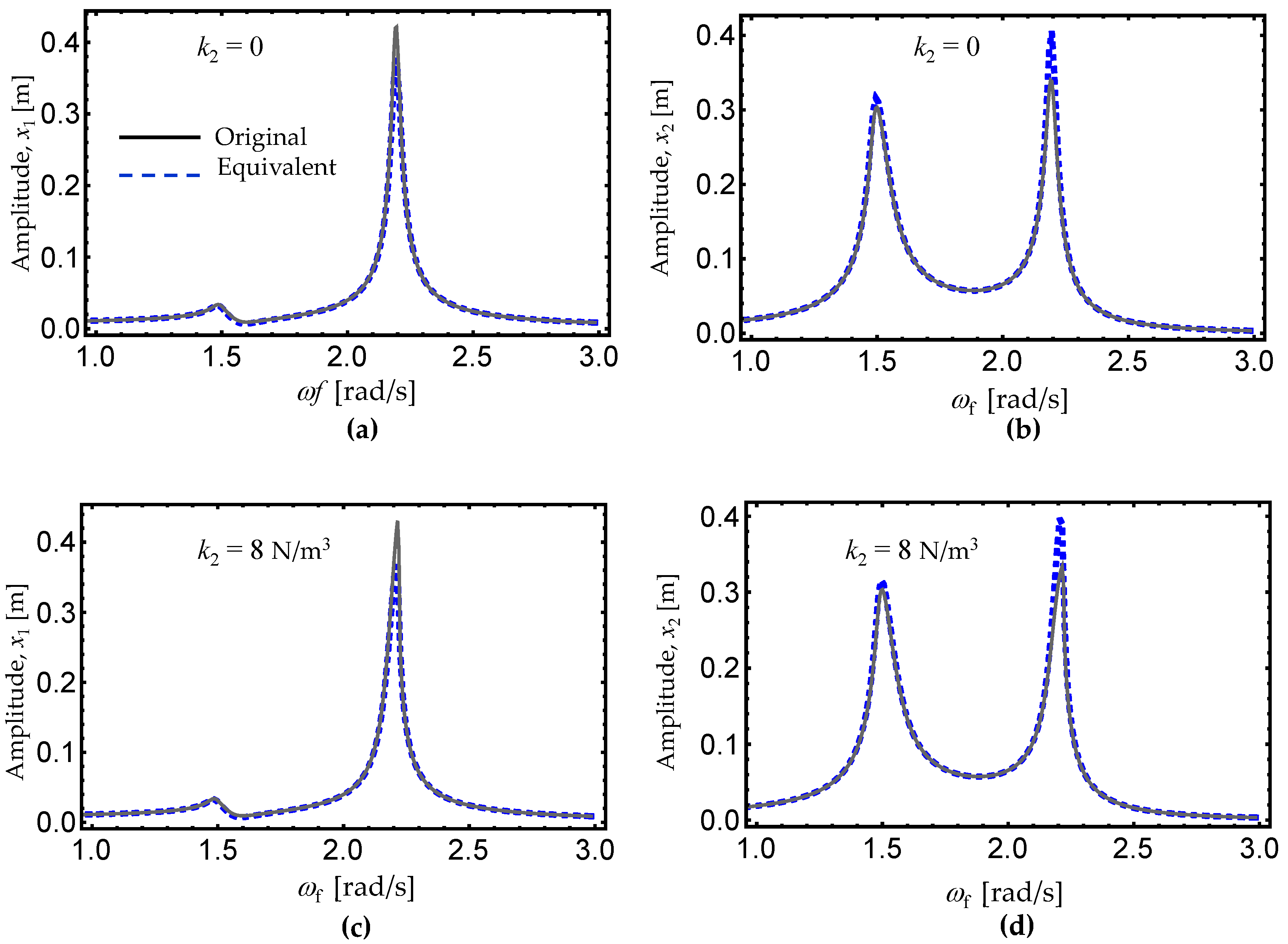
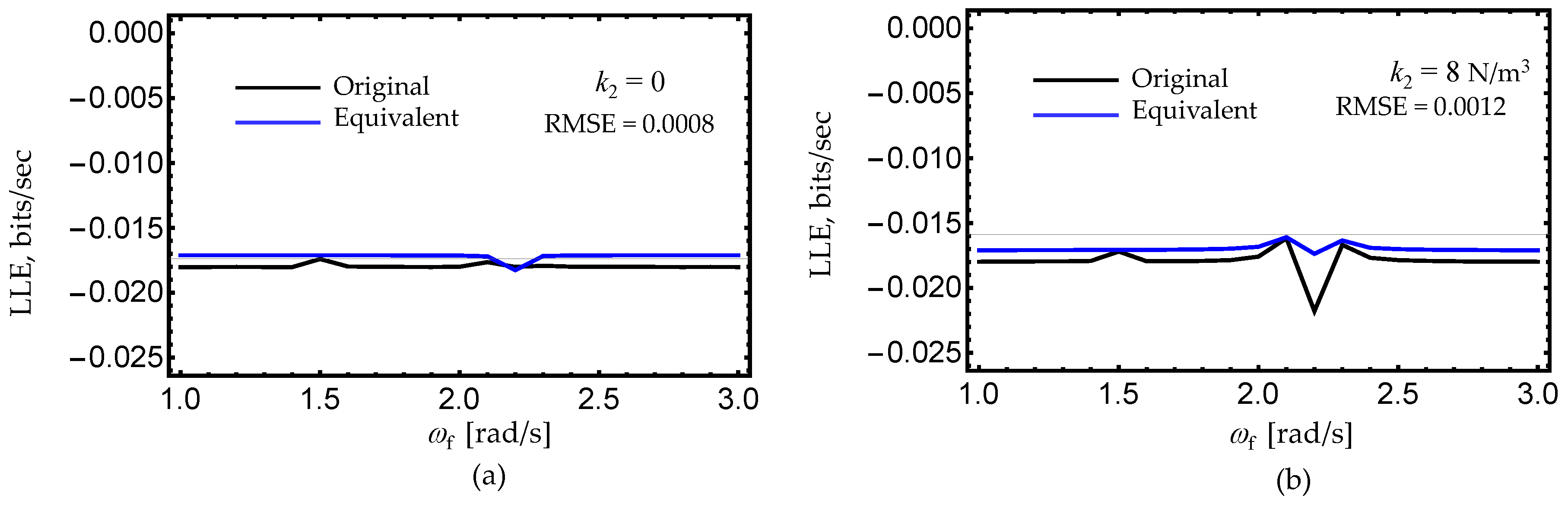
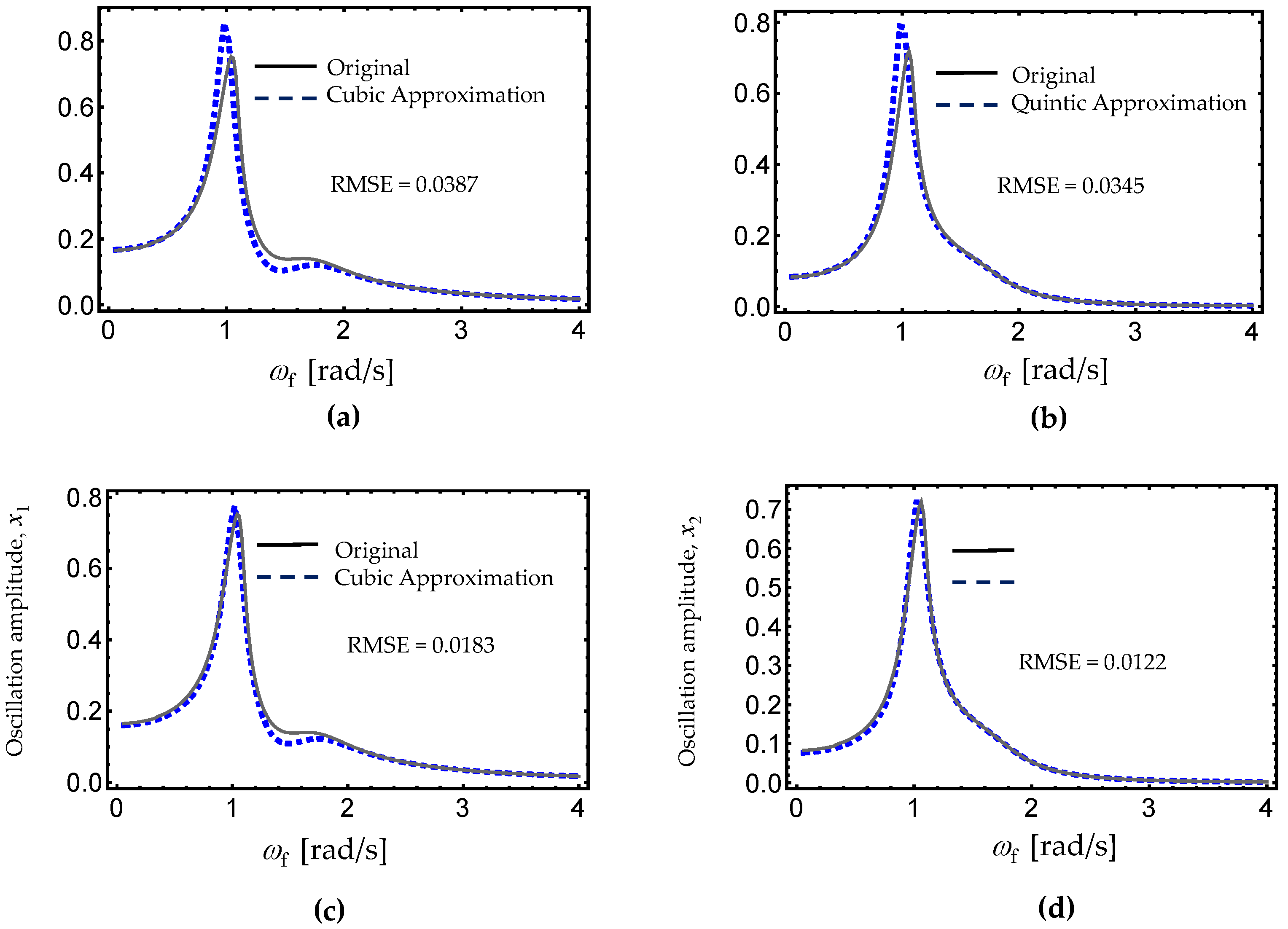
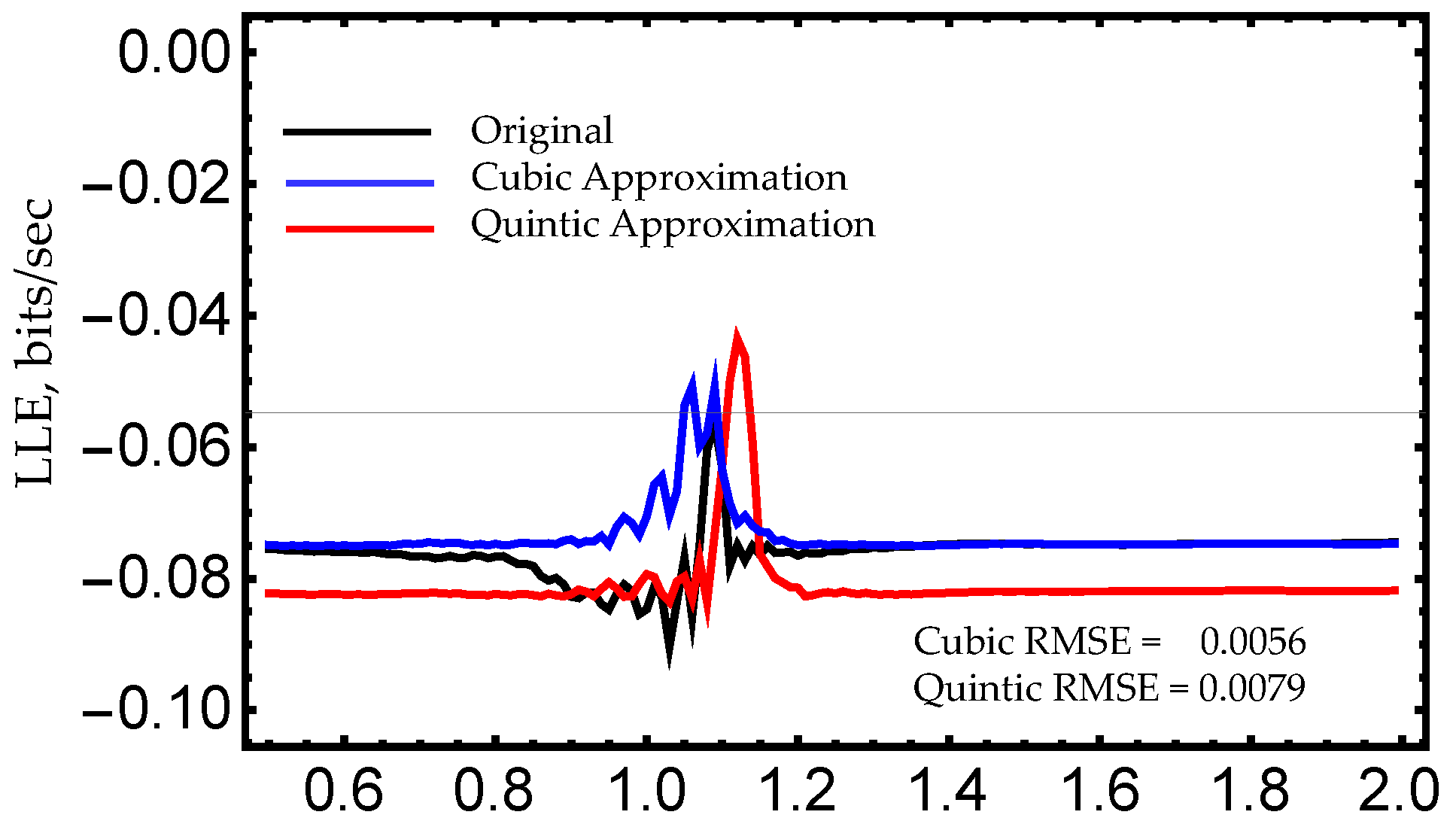
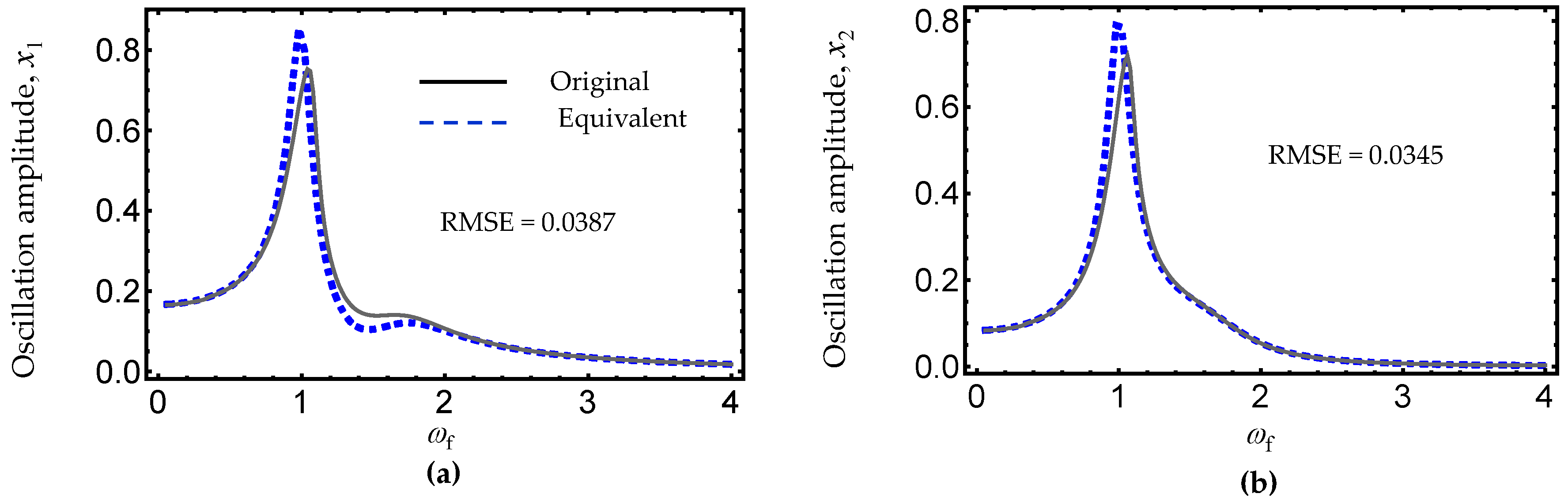
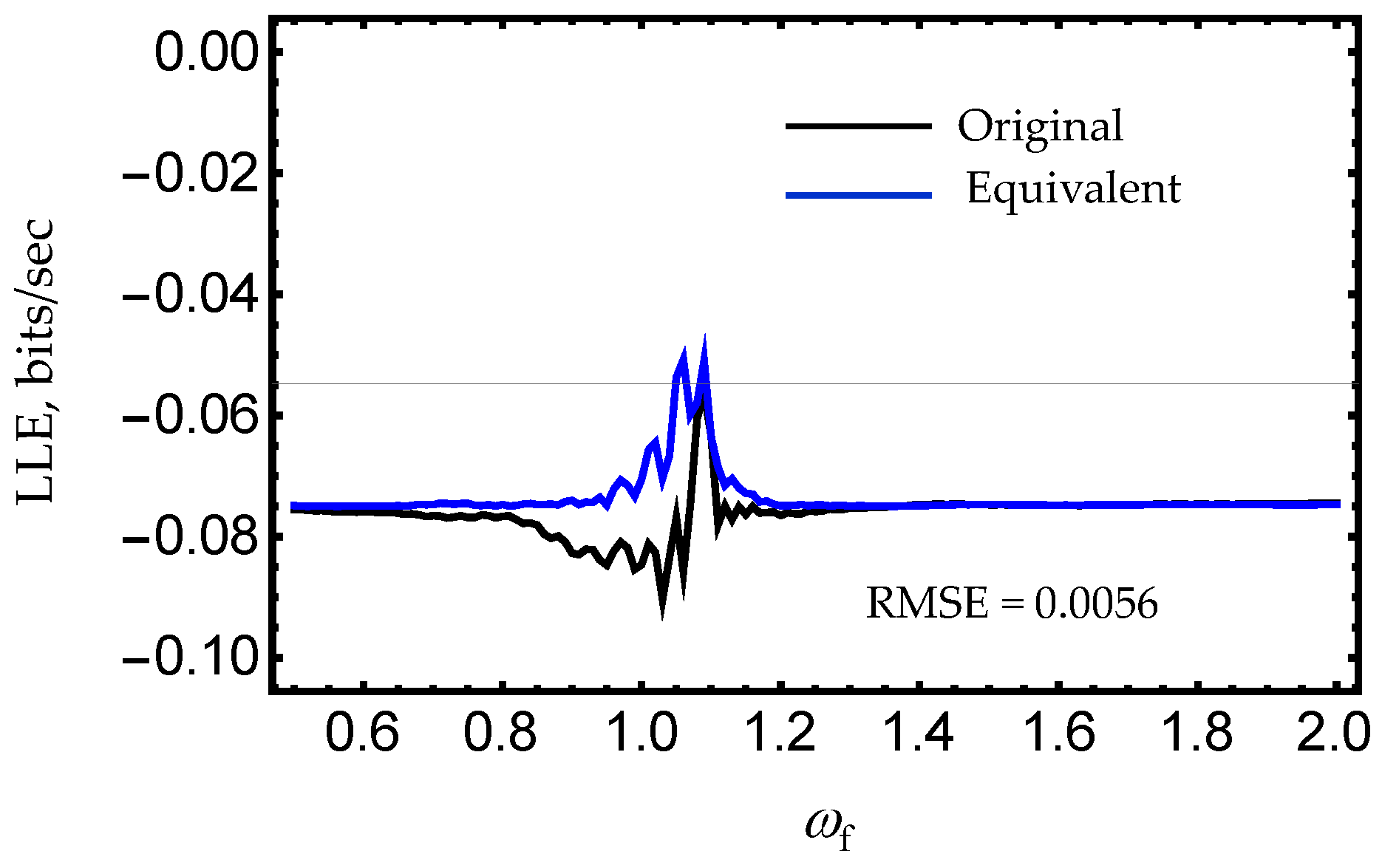
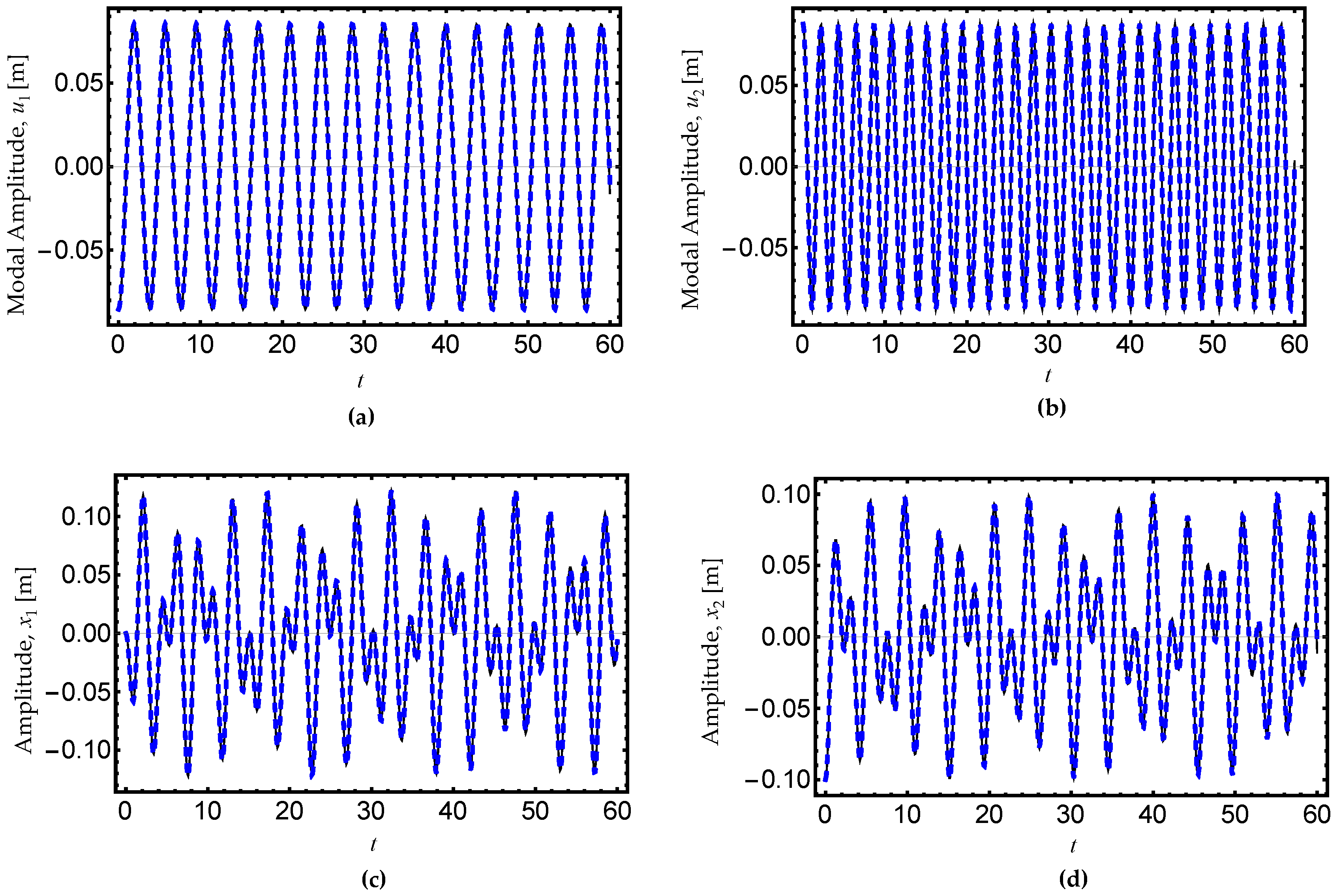
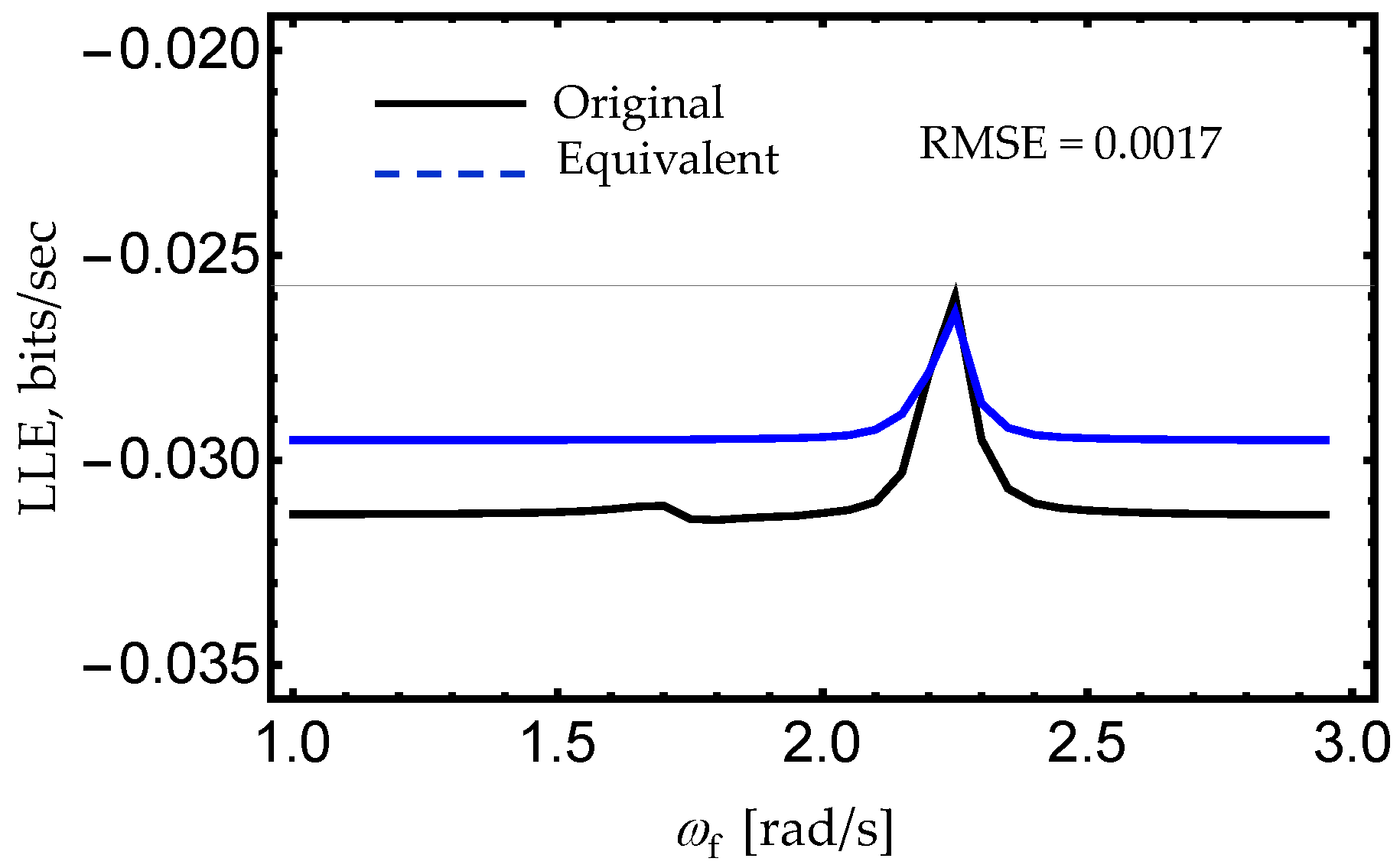
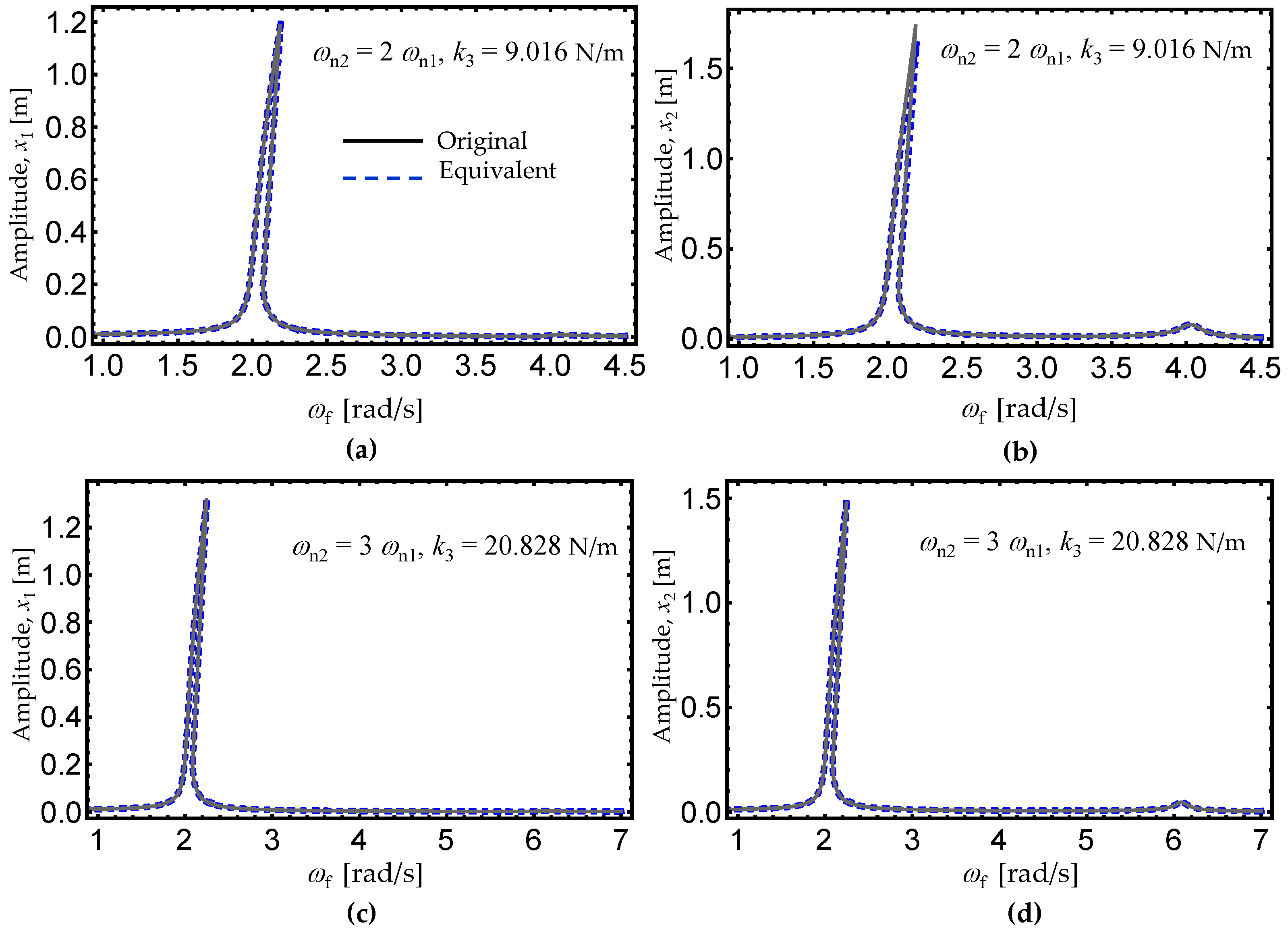
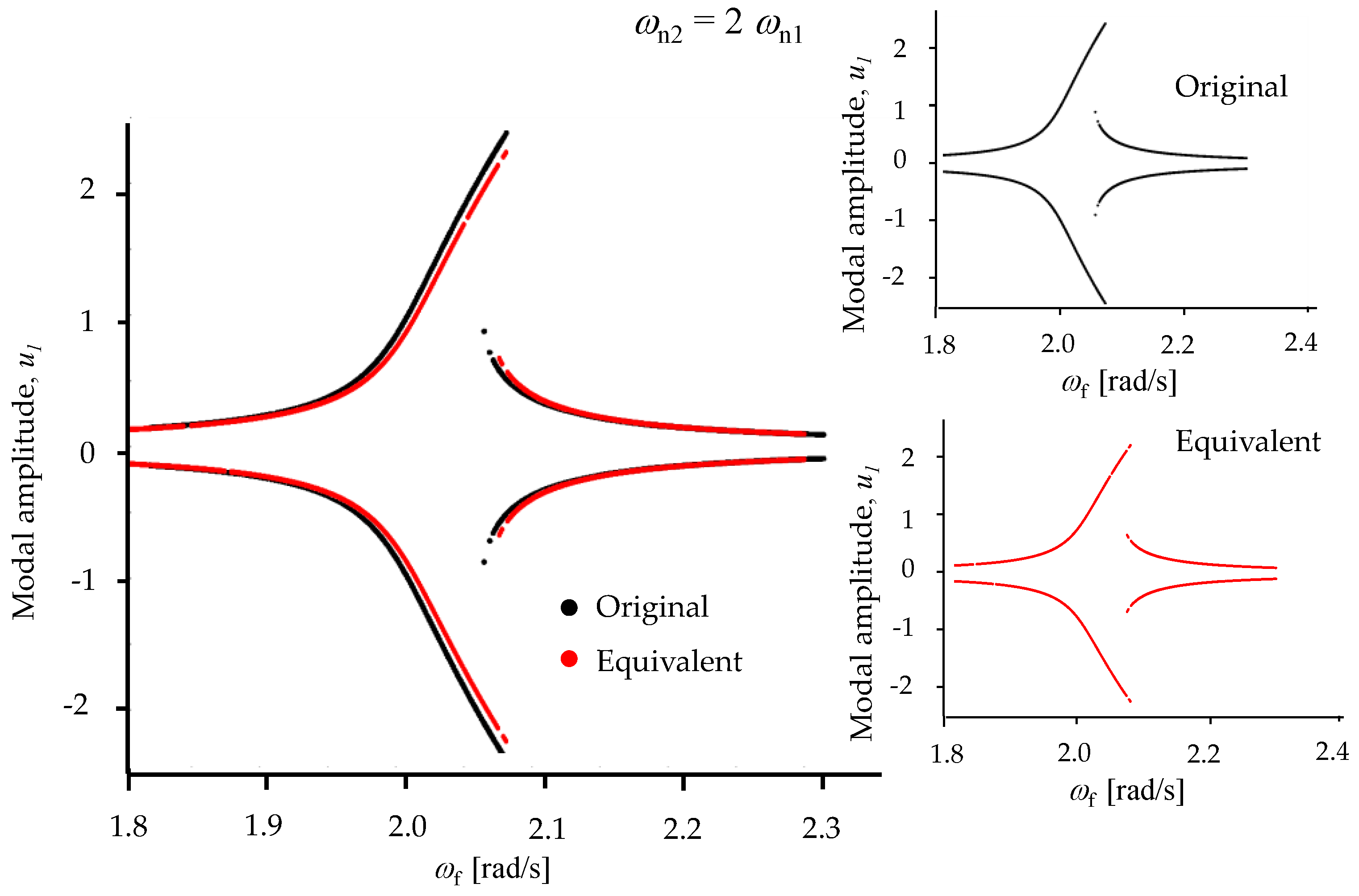
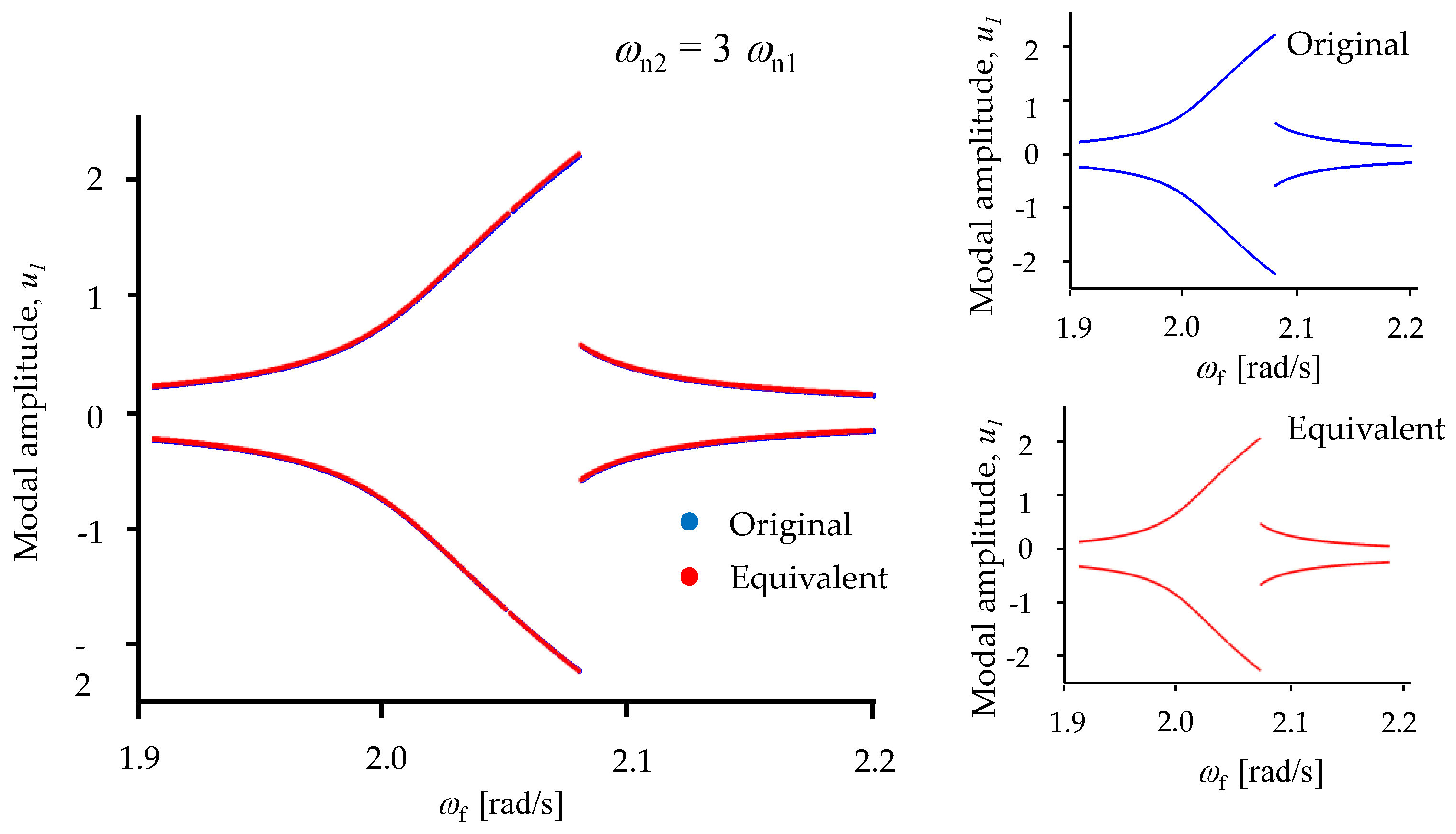
4.2. Example 2: A Forced System with Cubic Nonlinearities
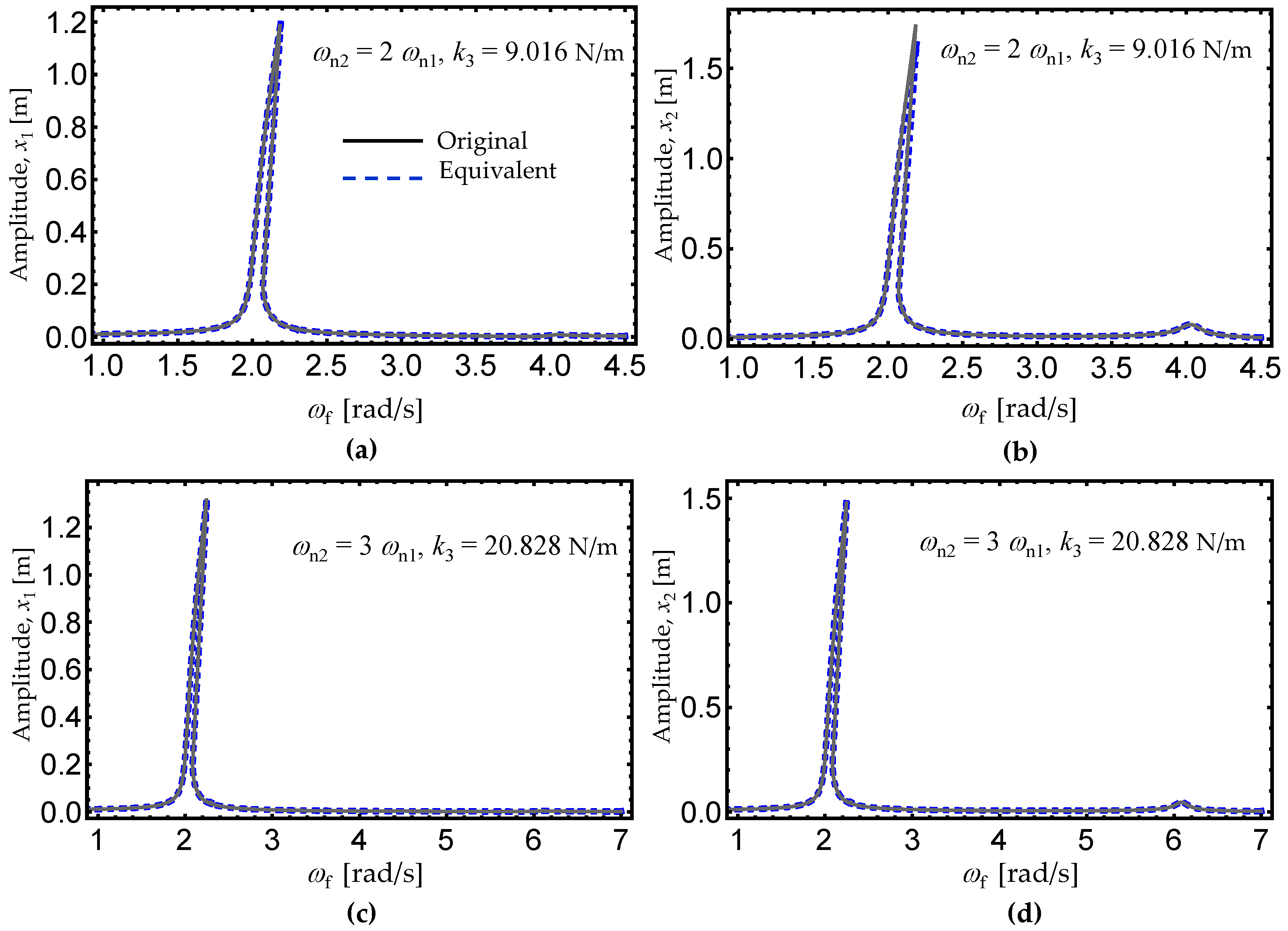
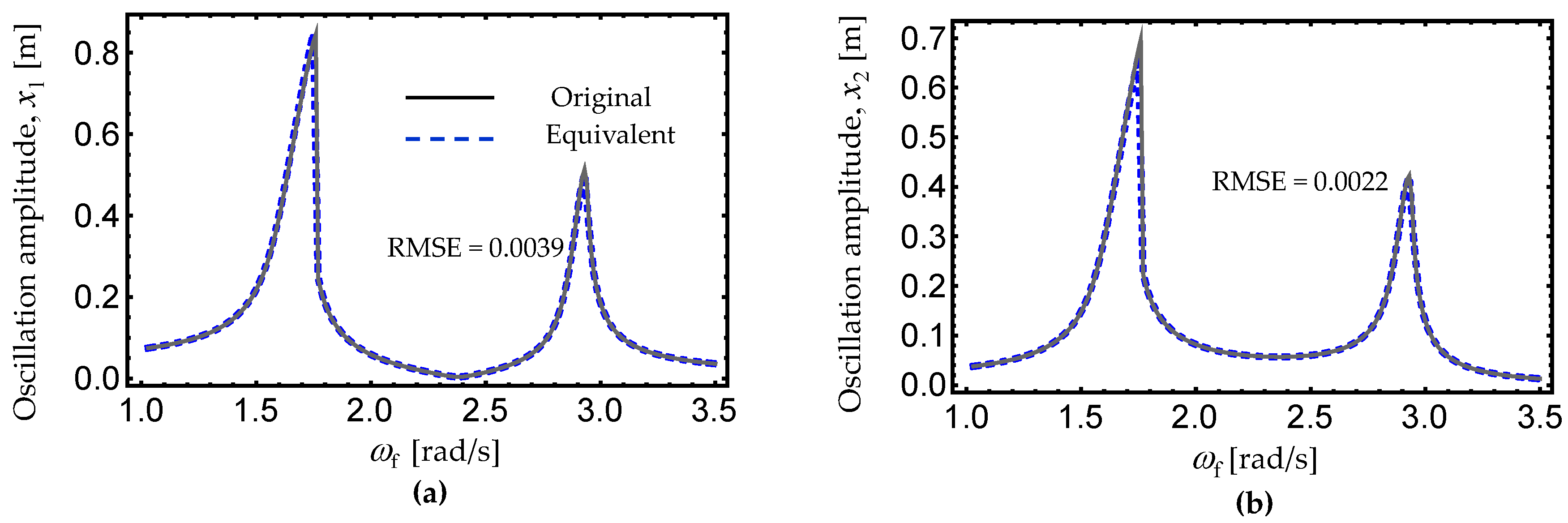
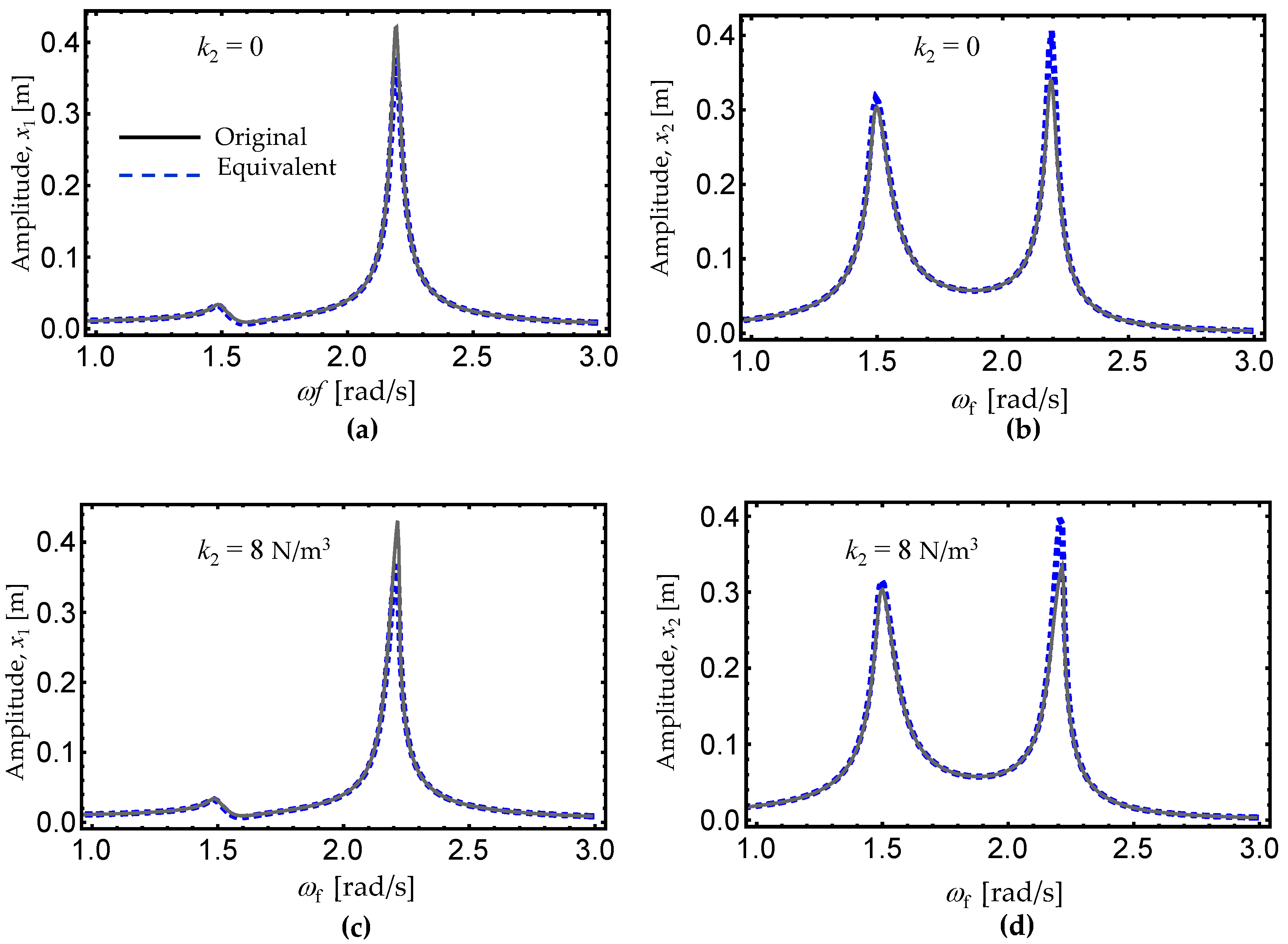
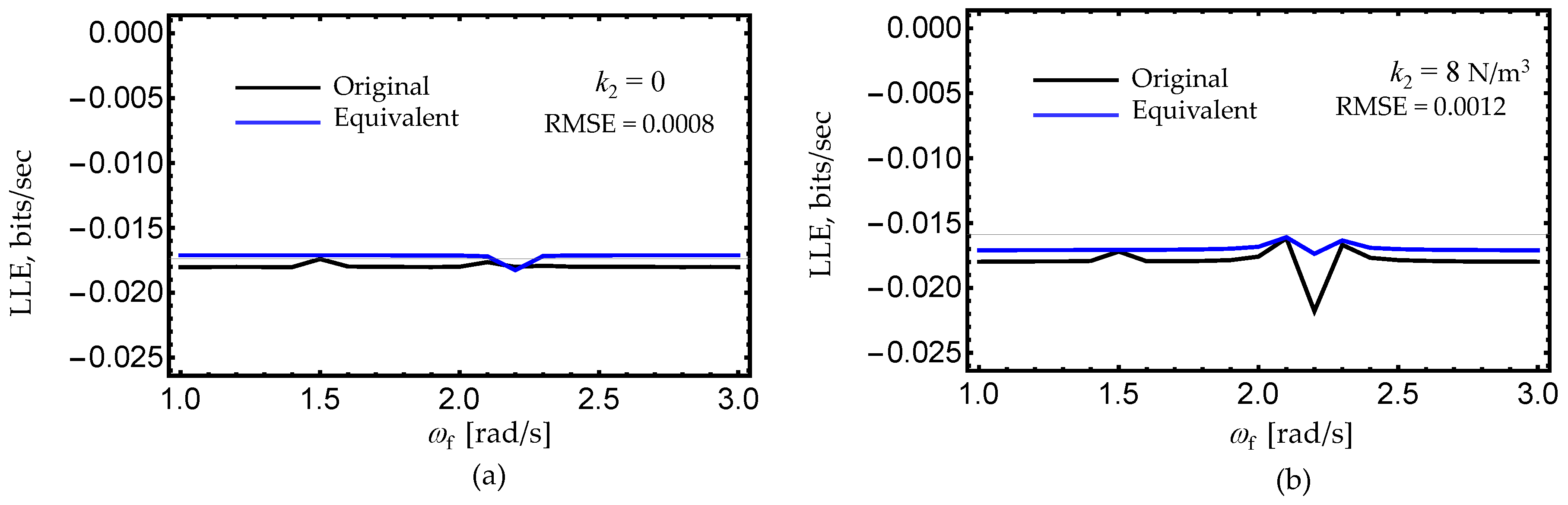
4.3. Example 3: A Nonlinear Absorber System
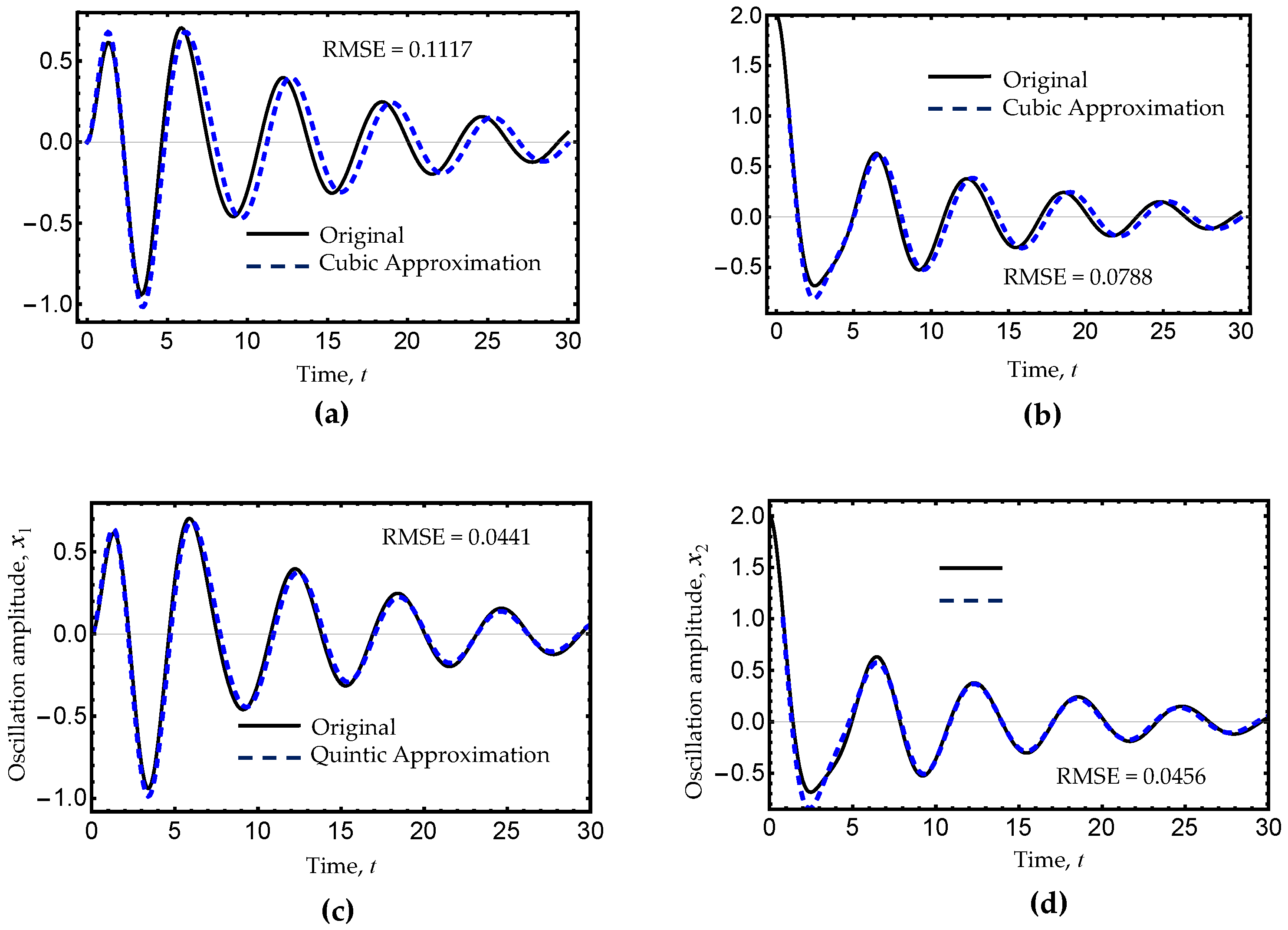
5. Fifth-Order Power Series Expansion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Minorsky, N. Introduction to non-linear mechanics, Part II, Analytical Methods of Non-Linear Mechanics. The David W. Taylor Model Basin U. S. N. Report #546. MIT Libraries: Cambridge MA USA, September 1945. [Google Scholar]
- Caughey, T.K. Equivalent linearisation techniques. J. Acoust. Soc. Am. 1963, 35, 1706–1711. [Google Scholar] [CrossRef]
- Iwan, W.D. On defining equivalent systems for certain ordinary non-linear differential equations. Int. J. Non-Linear Mech. 1969, 4, 325–334. [Google Scholar] [CrossRef]
- Iwan, W.D. A generalization of the concept of equivalent linearization. Int. J. Non-Linear Mech. 1973, 4, 279–287. [Google Scholar] [CrossRef]
- Shina, S.C.; Srinivasan, P. A weighted mean square method of linearization in non-linear oscillators. J. Sound Vib. 1971, 16, 139–148. [Google Scholar]
- Agrwal, V.P.; Denman, H.H. Weighted linearization technique for period approximation in large amplitude non-linear oscillations. J. Sound Vib. 1985, 99, 463–473. [Google Scholar] [CrossRef]
- Yuste, S.B.; Sánchez, A.M. A weighted mean-square method of cubication for non-linear oscillators. J. Sound Vib. 1989, 134, 423–433. [Google Scholar] [CrossRef]
- Yuste, S.B. Cubication of non-linear oscillators using the principle of harmonic balance. Int. J. Non-Linear Mech. 1992, 27, 347–356. [Google Scholar] [CrossRef]
- Cai, J.; Wu, X.; Li, Y.P. An equivalent nonlinearization method for strongly nonlinear oscillations. Mech. Res. Commun. 2005, 32, 553–560. [Google Scholar] [CrossRef]
- Farzaneh, Y.; Tootoonchi, A.A. Global Error Minimization method for solving strongly nonlinear oscillator differential equations. Comput. Math. Appl. 2010, 59, 2887–2895. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Olvera Trejo, D.; Ferrer Real, I.; Martínez-Romero, O. A Transformation Method for Solving Conservative Nonlinear Two Degree-of-Freedom Systems. Math. Probl. Eng. 2014, 2014, 237234. [Google Scholar] [CrossRef]
- Bhattacharyya, R.; Jain, P.; Nair, A. Normal model localization for a two degrees-of-freedom system with quadratic and cubic non-linearities. J. Sound Vib. 2002, 249, 909–919. [Google Scholar] [CrossRef]
- Touzé, C.; Thomas, O.; Chaigne, A. Hardening/softening behaviour in nonlinear oscillations of structural systems using non-linear normal modes. J. Sound Vib. 2004, 273, 77–101. [Google Scholar] [CrossRef]
- Alexander, N.A.; Schilder, F. Exploring the performance of a nonlinear tuned mass damper. J. Sound Vib. 2009, 319, 445–462. [Google Scholar] [CrossRef]
- Pirbodaghi, T.; Hoseini, S. Nonlinear Free Vibration of a Symmetrically Conservative Two-Mass System With Cubic Nonlinearity. J. Comput. Non-Linear Dyn. 2010, 5, 011006-1–011006-6. [Google Scholar] [CrossRef]
- Trueba, J.L.; Rams, J.; Sanjuán, M.A.F. Analytical estimates of the effect of nonlinear damping in some nonlinear oscillators. Int. J. Bifurc. Chaos 2000, 10, 2257–2267. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Martínez-Romero, O. Accurate Solutions of Conservative Nonlinear Oscillators by the Enhanced Cubication Method. Math. Probl. Eng. 2013, 2013, 842423. [Google Scholar] [CrossRef]
- Rand, R.H. Nonlinear Normal Modes in Two-Degree-of-Freedom Systems. J. Appl. Mech. 1971, 38, 561. [Google Scholar] [CrossRef]
- Rand, R.H. The Geometrical Stability of Non-Linear Normal Modes in Two Degree of Freedom Systems. Int. J. Non-Linear Mech. 1973, 8, 161–168. [Google Scholar] [CrossRef]
- Shaw, S.W.; Pierre, C. Normal Modes for Non-Linear Vibratory Systems. J. Sound Vib. 1993, 164, 85–124. [Google Scholar] [CrossRef]
- Jiang, D.; Pierre, C.; Shaw, S.W. Nonlinear normal modes for vibratory systems under harmonic excitation. J. Sound Vib. 2005, 288, 791–812. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Mook, D.T. Non-Linear Oscillations; John-Willey: New-York, NY, USA, 1979. [Google Scholar]
- Nayfeh, A.H.; Sanchez, N.E. Bifurcations in a forced softening Duffing oscillator. Int. J. Non-Linear Mech. 1989, 24, 483–497. [Google Scholar] [CrossRef]
- Okabea, T.; Kondou, T. Improvement to the averaging method using the Jacobian elliptic function. J. Sound Vib. 2009, 320, 339–364. [Google Scholar] [CrossRef]
- Koshlyakov, V.N.; Makarov, V.L. Mechanical systems, equivalent in Lyapunov’s sense to systems not containing non-conservative positional forces. J. Appl. Math. Mech. 2007, 71, 10–19. [Google Scholar] [CrossRef]
- Zalygina, V.I. Lyapunov Equivalence of Systems with Unbounded Coefficients. J. Math. Sci. 2015, 210, 210–216. [Google Scholar] [CrossRef]
- Peeters, M.; Viguié, R.; Sérandour, G.; Kerschen, G.; Golinval, J.-C. Nonlinear normal modes, part II: Toward a practical computation using numerical continuation techniques. Mech. Syst. Signal Process. 2009, 23, 195–216. [Google Scholar] [CrossRef]
- Dick, A.J.; Balachandran, B.; Mote, C.D. Intrinsic localized modes in microresonator arrays and their relationship to nonlinear vibration modes. Nonlinear Dyn. 2008, 54, 13–29. [Google Scholar] [CrossRef]
- Bellet, R.; Cochelin, B.; Herzog, P.; Mattei, P.-O. Experimental study of targeted energy transfer from an acoustic system to a nonlinear membrane absorber. J. Sound Vib. 2010, 329, 2768–2791. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, W.; Zhang, L. Applied multiscale method to analysis of nonlinear vibration for double-walled carbon nanotubes. Appl. Math. Model. 2011, 35, 2279–2289. [Google Scholar] [CrossRef]
- Kerschen, G.; Peeters, M.; Golinval, J.-C.; Stephan, C. Nonlinear modal analysis of a full-scale aircraft. J. Aircr. 2013, 50, 1409–1419. [Google Scholar] [CrossRef]
- Renson, L.; Noël, J.P.; Kerschen, G. Complex dynamics of a nonlinear aerospace structure: Numerical continuation and normal modes. Nonlinear Dyn. 2015, 79, 1293–1309. [Google Scholar] [CrossRef]
- Kuether, R.J.; Allen, M.S.; Hollkamp, J.J. Modal substructuring of geometrically nonlinear finite-element models. AIAA J. 2015, 54, 691–702. [Google Scholar] [CrossRef]
- Kuether, R.J.; Deaner, B.J.; Hollkamp, J.J.; Allen, M.S. Evaluation of geometrically nonlinear reduced-order models with nonlinear normal modes. AIAA J. 2015, 53, 3273–3285. [Google Scholar] [CrossRef]
- Lacarbonara, W.; Carboni, B.; Quaranta, G. Nonlinear normal modes for damage detection. Meccanica 2016, 51, 1–17. [Google Scholar] [CrossRef]
- Meirovitch, L. Elements of Vibration Analysis; McGraw-Hill Book Company: New York, NY, USA, 1986. [Google Scholar]
- Barabanov, E.A. Maximal Linear Transformation Groups Preserving the Asymptotic Properties of Linear Differential Systems: II. Differ. Equ. 2012, 48, 1545–1562. [Google Scholar] [CrossRef]
- Touzé, C.; Amabili, M. Nonlinear normal modes for damped geometrically nonlinear systems: Application to reduced-order modelling of harmonically forced structures. J. Sound Vib. 2006, 298, 958–981. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A. A General Solution of the Duffing Equation. Nonlinear Dyn. 2006, 45, 227–235. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov Exponents from a time series. Phys. D Nonlinear Phenom. 1985, 16, 285–317. [Google Scholar] [CrossRef]
- Sandri, M. Numerical calculations of Lyapunov exponents. Math. J. 1996, 6, 78–84. [Google Scholar]
- Kerschen, G.; Peeters, M.; Golinval, J.C.; Vakakis, A.F. Nonlinear normal modes, Part I: A useful frame work for the structural dynamicist. Mech. Syst. Signal Process. 2009, 23, 170–194. [Google Scholar] [CrossRef]
- Blumberg, H. On Convex Functions. Trans. Am. Math. Soc. 1919, 20, 40–44. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2009; pp. 67–74. [Google Scholar]
- Soriano, J.M. Global Minimum Point of a Convex Function. Appl. Math. Comput. 1993, 55, 213–218. [Google Scholar] [CrossRef]
- Barbu, V.; Precupanu, T. Convexity and Optimization in Banach Spaces; Springer Monographs in Mathematics; Springer Science & Business Media: Berlin, Germany; Springer: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Hsu, C.S. On the application of elliptic functions in nonlinear forced oscillations. Q. Appl. Math. 1960, 17, 393–407. [Google Scholar] [CrossRef]
- Chen, S.H.; Cheung, Y.K. A modified Lindstedt-Poincare method for a strongly non-linear two degree-of-freedom-system. J. Sound Vib. 1996, 193, 751–762. [Google Scholar] [CrossRef]
- Franciosi, C.; Tomasiello, S. The use of Mathematica for the analysis of strongly nonlinear two degree-of-freedom systems by means of the modified Lindstedt-Poincaré method. J. Sound Vib. 1998, 211, 145–156. [Google Scholar] [CrossRef]
- Ji, J.C. Application of a Weakly Nonlinear Absorber to Suppress the Resonant Vibrations of a Forced Nonlinear Oscillator. J. Vib. Acoust. 2012, 134, 044502. [Google Scholar] [CrossRef]
- Vakakis, A.F. Nonlinear normal modes (NNMs) and their application in vibration theory: An overview. Mech. Syst. Signal Process. 1997, 11, 3–22. [Google Scholar] [CrossRef]
- Elías-Zúñiga, A.; Martínez-Romero, O. Investigation of the equivalent representation form of damped strongly nonlinear oscillators by a nonlinear transformation approach. J. Appl. Math. 2013, 2013, 245092. [Google Scholar] [CrossRef]
- Blanc, F.; Touzé, C.; Mercier, F.F.; Ege, K.; Ben-Dhia, A.S.B. On the numerical computation of nonlinear normal modes for reduced-order modelling of conservative vibratory systems. Mech. Syst. Signal Process. 2013, 36, 520–539. [Google Scholar] [CrossRef]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elías-Zúñiga, A.; Palacios-Pineda, L.M.; Olvera-Trejo, D.; Martínez-Romero, O. Lyapunov Equivalent Representation Form of Forced, Damped, Nonlinear, Two Degree-of-Freedom Systems. Appl. Sci. 2018, 8, 649. https://doi.org/10.3390/app8040649
Elías-Zúñiga A, Palacios-Pineda LM, Olvera-Trejo D, Martínez-Romero O. Lyapunov Equivalent Representation Form of Forced, Damped, Nonlinear, Two Degree-of-Freedom Systems. Applied Sciences. 2018; 8(4):649. https://doi.org/10.3390/app8040649
Chicago/Turabian StyleElías-Zúñiga, Alex, Luis M. Palacios-Pineda, Daniel Olvera-Trejo, and Oscar Martínez-Romero. 2018. "Lyapunov Equivalent Representation Form of Forced, Damped, Nonlinear, Two Degree-of-Freedom Systems" Applied Sciences 8, no. 4: 649. https://doi.org/10.3390/app8040649
APA StyleElías-Zúñiga, A., Palacios-Pineda, L. M., Olvera-Trejo, D., & Martínez-Romero, O. (2018). Lyapunov Equivalent Representation Form of Forced, Damped, Nonlinear, Two Degree-of-Freedom Systems. Applied Sciences, 8(4), 649. https://doi.org/10.3390/app8040649