Acceleration Harmonic Estimation for Hydraulic Servo Shaking Table by Using Simulated Annealing Algorithm


Abstract
:1. Introduction
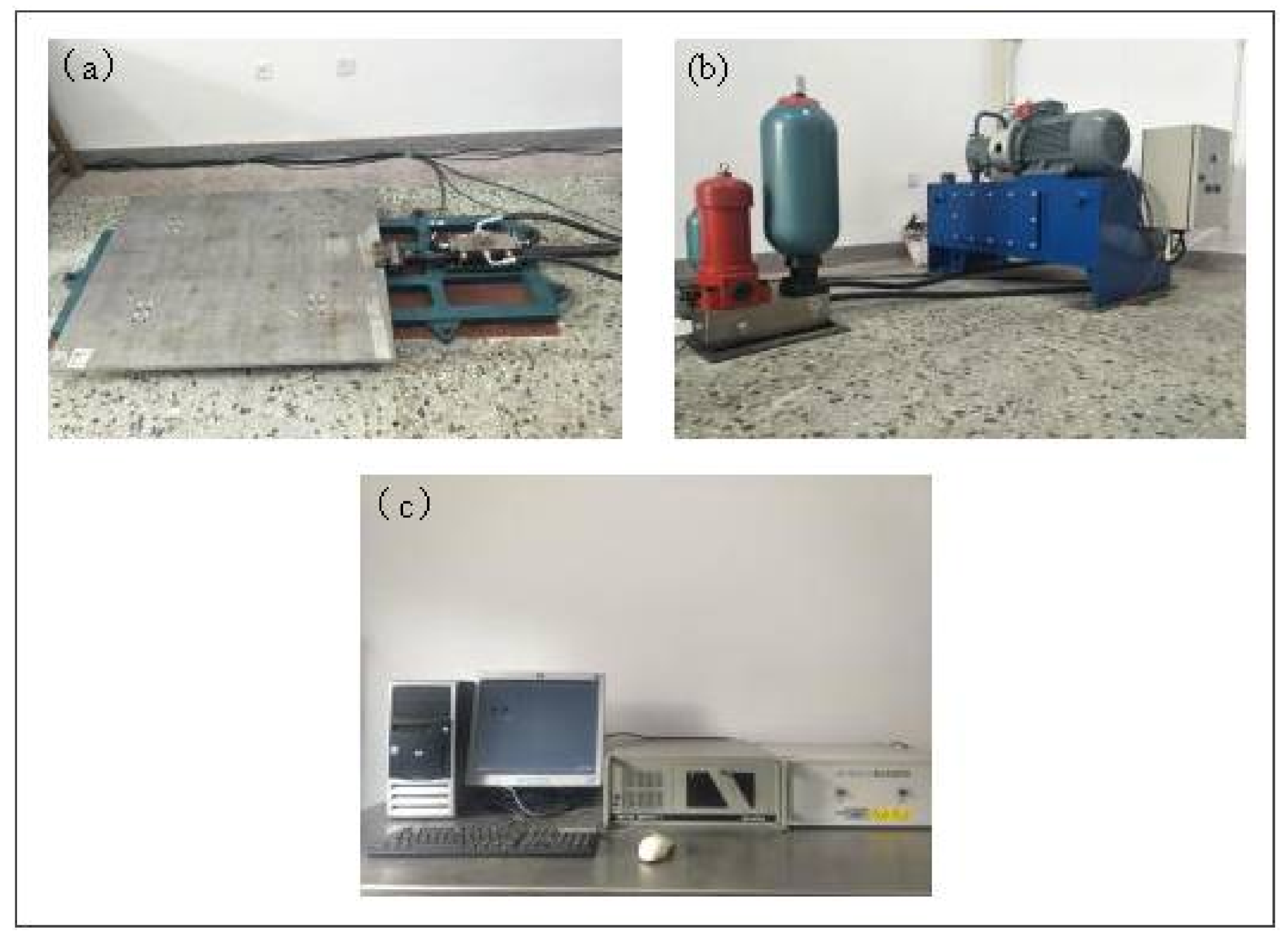
2. Hydraulic Servo Shaking Table
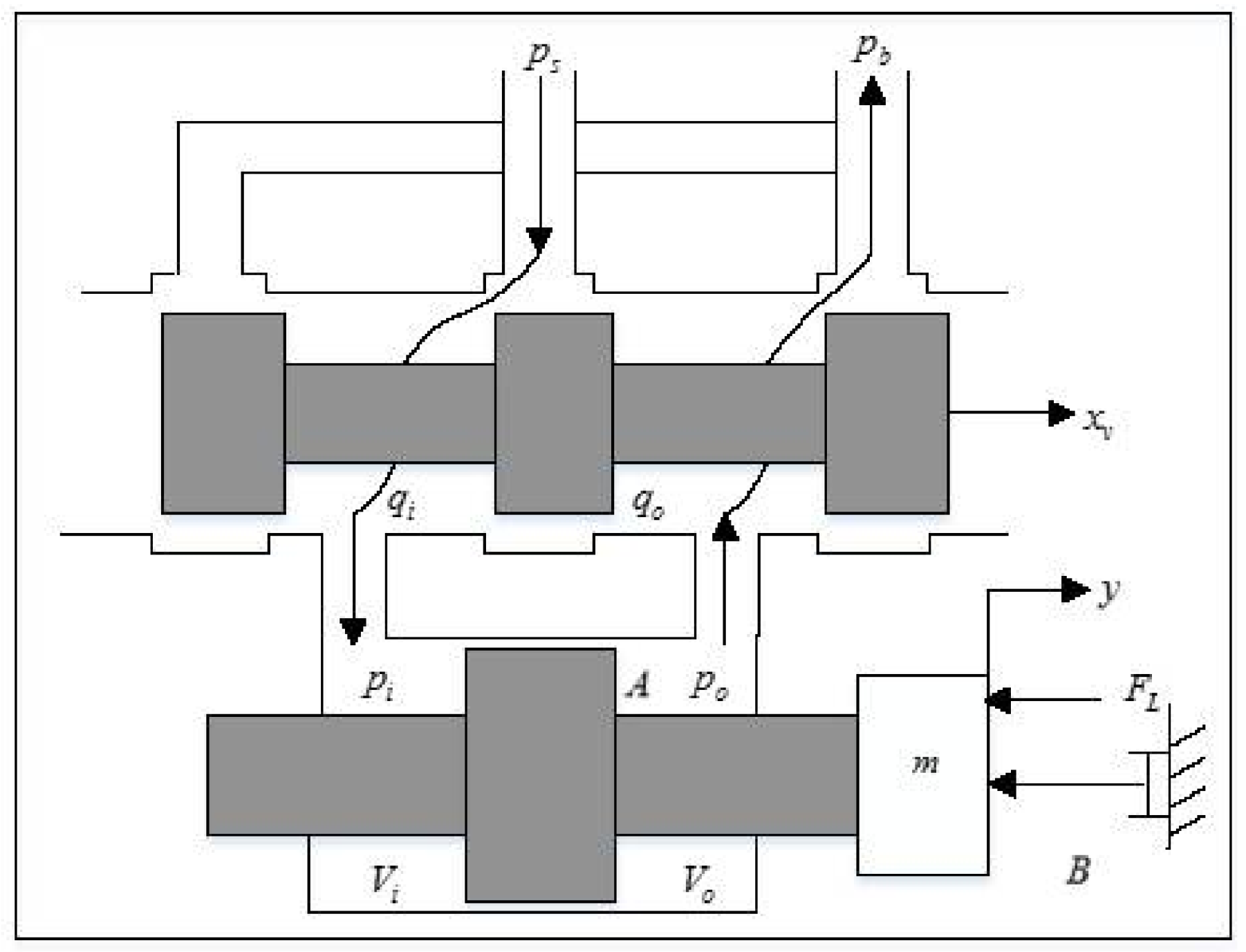
2.1. Dynamic Model
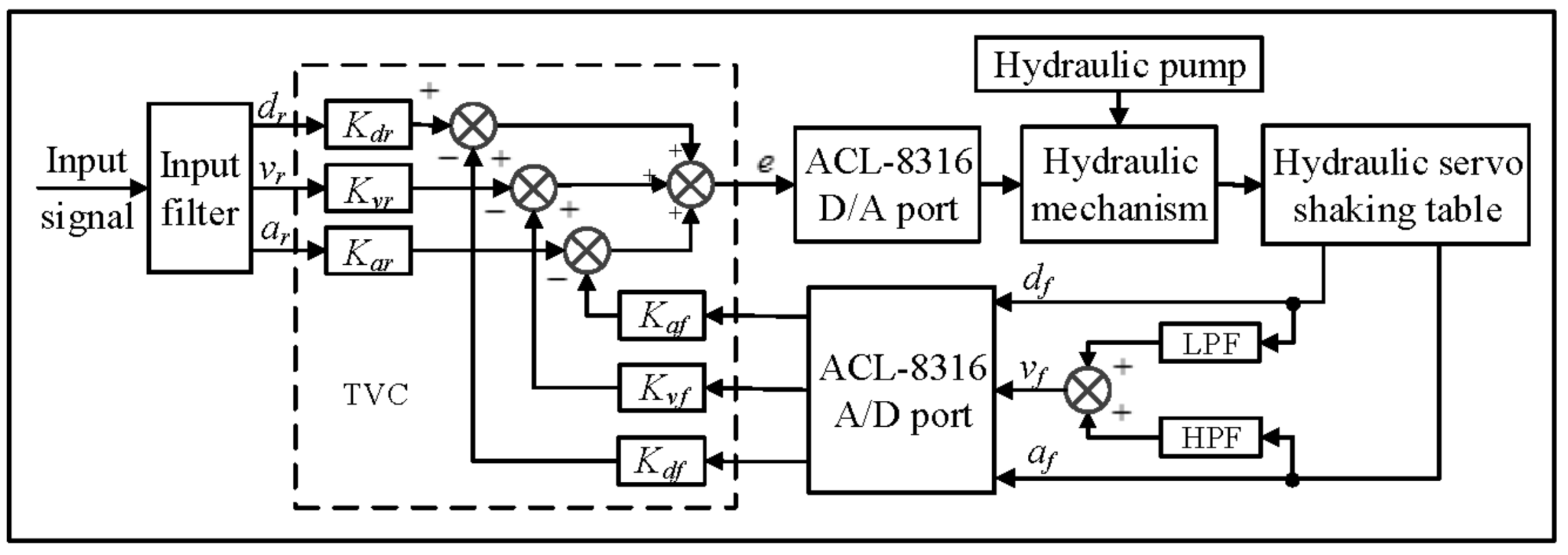
2.2. Control Principle
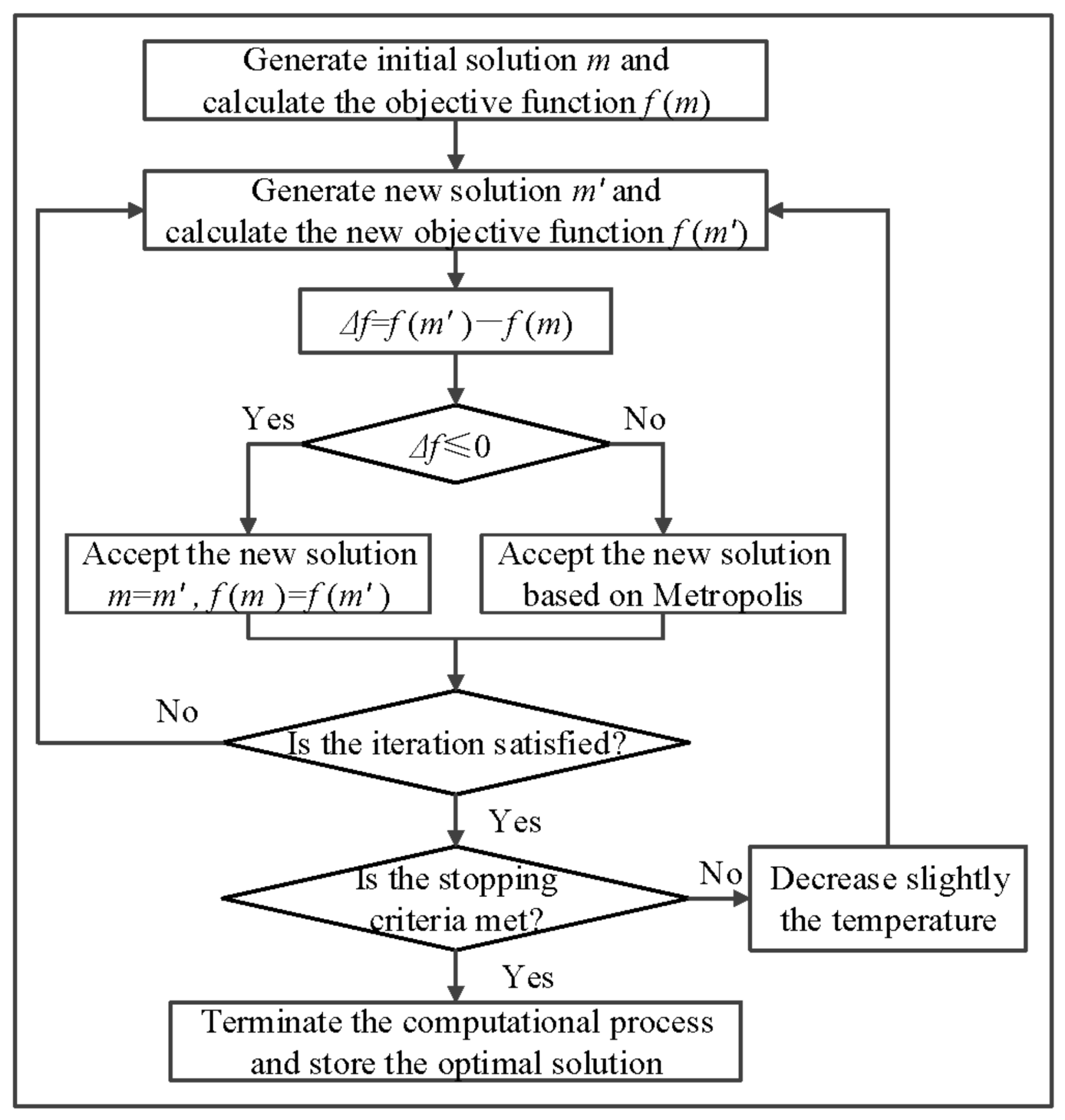
3. Simulated Annealing Algorithm
4. Harmonic Estimation Scheme
5. Simulation and Results
6. Experiment and Results
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shen, G.; Lv, G.M.; Ye, Z.M.; Cong, D.C. Implementation of electrohydraulic shaking table controllers with a combined adaptive inverse control and minimal control synthesis algorithm. IET Control Theory Appl. 2011, 5, 1471–1483. [Google Scholar] [CrossRef]
- Xu, Y.; Hua, H.; Han, J. Modeling and controller design of a shaking table in an active structural control system. Mech.Syst. Signal Process. 2008, 22, 1917–1923. [Google Scholar] [CrossRef]
- Tang, B.; Li, X.; Chen, S.; Xiong, L. Shaking Table Test of a RC Frame with EPSC Latticed Concrete Infill Wall. Shock Vib. 2017, 2017, 1–18. [Google Scholar] [CrossRef]
- Li, W.; Liu, W.; Wang, S.; Du, D. In-Plane Strengthening Effect of Prefabricated Concrete Walls on Masonry Structures: Shaking Table Test. Shock Vib. 2017, 2017, 1–13. [Google Scholar] [CrossRef]
- Zhang, L.; Cong, D.; Yang, Z.; Zhang, Y.; Han, J. Optimal Design and Hybrid Control for the Electro-Hydraulic Dual-Shaking Table System. Appl. Sci. 2016, 6, 220. [Google Scholar] [CrossRef]
- Shen, W.; Wang, J.Z.; Wang, S.K. The control of the electro-hydraulic shaking table based on dynamic surface adaptive robust control. Trans. Inst. Meas. Control 2016, 39, 1271–1290. [Google Scholar] [CrossRef]
- Yao, J. Acceleration Harmonic Cancellation of Electro-hydraulic Servo Shaking Table. J. Mech. Eng. 2010, 46, 22–28. [Google Scholar] [CrossRef]
- Yao, J.; Xiao, R.; Chen, S.; Di, D.; Gao, S.; Yu, H. Acceleration harmonic identification algorithm based on the unscented Kalman filter for shaking signals of an electro-hydraulic servo shaking table. J. Vib. Control 2014, 21, 3205–3217. [Google Scholar] [CrossRef]
- Tanaka, T.; Nishida, Y.; Funabiki, S. A method of compensating harmonic currents generated by consumer electronic equipment using the correlation function. IEEE Trans. Power Deliv. 2004, 19, 266–271. [Google Scholar] [CrossRef]
- Freijedo, F.D.; Doval-Gandoy, J.; Lopez, O.; Penalver, C.M. Novel Harmonic Identification Algorithm Based on Fourier Correlation and Moving Average Filtering. In Proceedings of the Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Singh, G.K. Power system harmonics research: A survey. Int. Trans. Electr. Energy Syst. 2009, 19, 151–172. [Google Scholar] [CrossRef]
- Lin, H.C. Power Harmonics and Interharmonics Measurement Using Recursive Group-Harmonic Power Minimizing Algorithm. Eng. Lett. 2011, 2191, 1184–1193. [Google Scholar] [CrossRef]
- Bettayeb, M.; Qidwai, U. Recursive estimation of power system harmonics. Electr. Power Syst. Res. 1998, 47, 143–152. [Google Scholar] [CrossRef]
- Ray, P.K.; Subudhi, B. Ensemble-Kalman-Filter-Based Power System Harmonic Estimation. IEEE Trans. Instrum. Meas. 2012, 61, 3216–3224. [Google Scholar] [CrossRef]
- Gomez-Acedo, E.; Olarra, A.; Orive, J.; de la Calle, L.N.L. Methodology for the design of a thermal distortion compensation for large machine tools based in state-space representation with Kalman filter. Int. J. Mach. Tools Manuf. 2013, 75, 100–108. [Google Scholar] [CrossRef]
- Barros, J.; Diego, R.I. Application of the wavelet-packet transform to the estimation of harmonic groups in current and voltage waveforms. IEEE Trans. Power Deliv. 2006, 21, 533–535. [Google Scholar] [CrossRef]
- Sahoo, H.K.; Dash, P.K.; Rath, N.P. Frequency estimation of distorted non-stationary signals using complex H ∞ filter. AEUE Int. J. Electron. Commun. 2012, 66, 267–274. [Google Scholar] [CrossRef]
- Soliman, S.A.; Alammari, R.A.; El-Hawary, M.E. Frequency and harmonics evaluation in power networks using fuzzy regression technique. Electr. Power Syst. Res. 2003, 66, 171–177. [Google Scholar] [CrossRef]
- Du, K.L.; Swamy, M.N.S. Search and Optimization by Metaheuristics: Techniques and Algorithms Inspired by Nature; Springer: Basel, Switzerland, 2016. [Google Scholar]
- Kumar, N.S.; Shrinivasarao, B.R.; Pai, P.S. Radial Basis Function Neural Network (RBFNN) Based Modeling in Liquified Petroleum Gas (LPG)-Diesel Dual Fuel Engine with Exhaust Gas Recirculation (EGR). Ind. J. Sci. Technol. 2016, 9. [Google Scholar] [CrossRef]
- Wang, P.; Zou, Y.; Zou, S.; Sun, Y. Hopfield Neural Network-based Estimation of Harmonic Currents in Power Systems. In Proceedings of the WCICA 2006 the Sixth World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 7494–7497. [Google Scholar]
- Ray, P.K.; Subudhi, B. BFO optimized RLS algorithm for power system harmonics estimation. Appl. Soft Comput. 2012, 12, 1965–1977. [Google Scholar] [CrossRef]
- Ji, T.Y.; Li, M.S.; Wu, Q.H.; Jiang, L. Optimal estimation of harmonics in a dynamic environment using an adaptive bacterial swarming algorithm. IET Gen. Trans. Distrib. 2011, 5, 609–620. [Google Scholar] [CrossRef]
- Tagawa, Y.; Kajiwara, K. Controller development for the E-Defense shaking table. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2007, 221, 171–181. [Google Scholar] [CrossRef]
- Li, S.; Chen, Y.; Du, H.; Feldman, M.W. A genetic algorithm with local search strategy for improved detection of community structure. Complexity 2010, 15, 53–60. [Google Scholar] [CrossRef]
- El-Naggar, K.M.; Alrashidi, M.R.; Alhajri, M.F.; Al-Othman, A.K. Simulated Annealing algorithm for photovoltaic parameters identification. Sol. Energy 2012, 86, 266–274. [Google Scholar] [CrossRef]
- Rajan, C.C.A.; Mohan, M.R. An evolutionary programming based simulated annealing method for solving the unit commitment problem. Power Syst. IEEE Trans. 2007, 19, 577–585. [Google Scholar] [CrossRef]
- Green, P.L. Bayesian system identification of a nonlinear dynamical system using a novel variant of Simulated Annealing. Mech. Syst. Signal Process. 2015, 52–53, 133–146. [Google Scholar] [CrossRef]
- Palacios, J.A.; Olvera, D.; Urbikain, G.; Elías-Zúñiga, A.; Martínez-Romero, O.; Lacalle, L.N.L.; Rodríguez, C.; Martínez-Alfaro, H. Combination of simulated annealing and pseudo spectral methods for the optimum removal rate in turning operations of nickel-based alloys. Adv. Eng. Softw. 2018, 115, 391–397. [Google Scholar] [CrossRef]
- Sechen, C. Placement and Global Routing of Integrated Circuits Using the Simulated Annealing Algorithm. Ph.D. Dissertation, University of California, Berkeley, CA, USA, 1986. [Google Scholar]
- Lutfiyya, H.; Mcmillin, B.; Poshyanonda, P.; Dagli, C. Composite stock cutting through simulated annealing. Math. Comput. Model. Int. J. 1992, 16, 57–74. [Google Scholar] [CrossRef]
- Rajan, C.C.A. Hydro-thermal unit commitment problem using simulated annealing embedded evolutionary programming approach. Int. J. Electr. Power Energy Syst. 2011, 33, 939–946. [Google Scholar] [CrossRef]
- Bouleimen, K.; Lecocq, H. A new efficient simulated annealing algorithm for the resource-constrained project scheduling problem and its multiple mode version. Eur. J. Oper. Res. 2003, 149, 268–281. [Google Scholar] [CrossRef]
- Olvera, D.; Elías-Zúñiga, A.; Martínez-Alfaro, H.; Lacalle, L.N.L.; Rodríguez, C.A.; Campa, F.J. Determination of the stability lobes in milling operations based on homotopy and simulated annealing techniques. Mechatronics 2014, 24, 177–185. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter |
|---|---|
| Piston diameter | 40 mm |
| Rod diameter | 35 mm |
| Stroke | 25 mm |
| Supply pressure | 8 Mpa |
| Frequency range | 0~50 Hz |
| Maximum velocity | 1.4 m/s |
| Maximum acceleration | 10 m/s2 |
| Harmonic Order | Given Value | Estimated Value | ||
|---|---|---|---|---|
| Amplitude (m/s2) | Phase (rad) | Amplitude (m/s2) | Phase (rad) | |
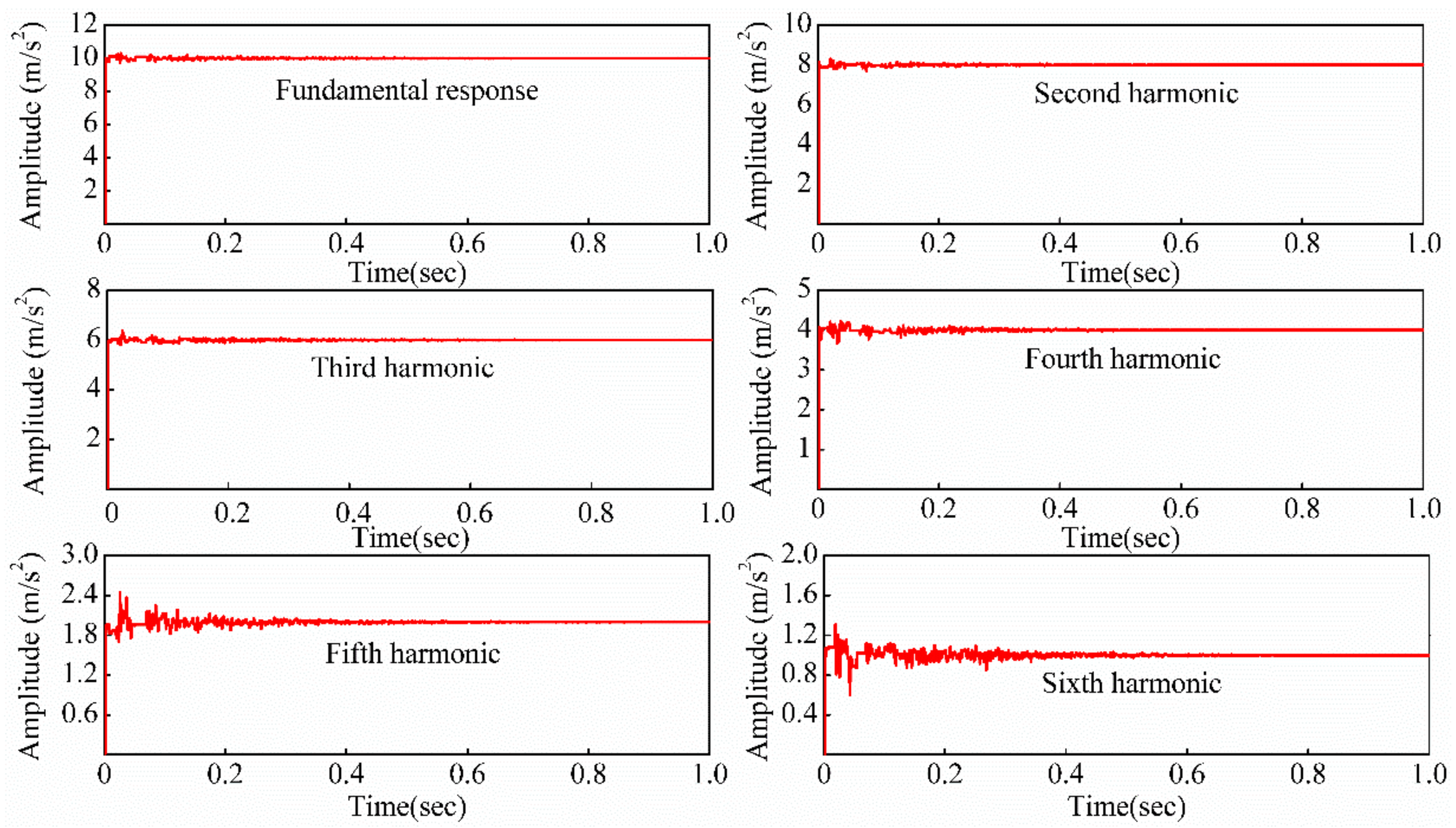
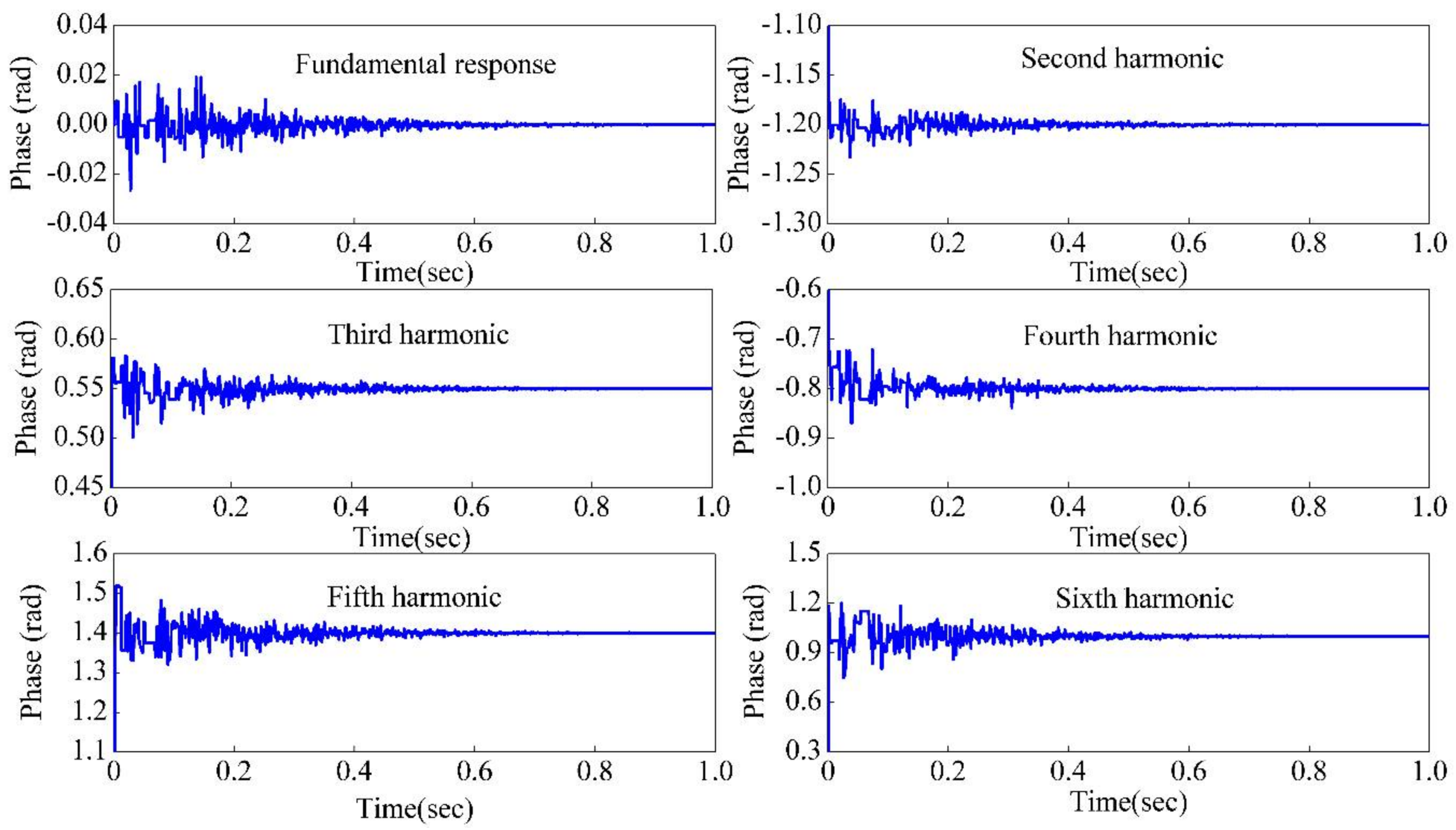
| Fundamental response | 10 | 0 | 9.999816 | −0.000004 |
| Second harmonic | 8 | −1.2 | 8.000417 | −1.19999 |
| Third harmonic | 6 | 0.55 | 5.999853 | 0.550035 |
| Fourth harmonic | 4 | −0.8 | 4.000689 | −0.79981 |
| Fifth harmonic | 2 | 1.4 | 1.999284 | 1.399997 |
| Sixth harmonic | 1 | 1 | 0.999776 | 0.999728 |
| THD | Harmonic Amplitude (m/s2) | |||||
|---|---|---|---|---|---|---|
| 22.22% | A1 | A2 | A3 | A4 | A5 | A6 |
| 3.9830 | 0.4162 | 0.3510 | 0.1971 | 0.5824 | 0.3306 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, J.; Wan, Z.; Fu, Y. Acceleration Harmonic Estimation for Hydraulic Servo Shaking Table by Using Simulated Annealing Algorithm. Appl. Sci. 2018, 8, 524. https://doi.org/10.3390/app8040524
Yao J, Wan Z, Fu Y. Acceleration Harmonic Estimation for Hydraulic Servo Shaking Table by Using Simulated Annealing Algorithm. Applied Sciences. 2018; 8(4):524. https://doi.org/10.3390/app8040524
Chicago/Turabian StyleYao, Jianjun, Zhenshuai Wan, and Yu Fu. 2018. "Acceleration Harmonic Estimation for Hydraulic Servo Shaking Table by Using Simulated Annealing Algorithm" Applied Sciences 8, no. 4: 524. https://doi.org/10.3390/app8040524
APA StyleYao, J., Wan, Z., & Fu, Y. (2018). Acceleration Harmonic Estimation for Hydraulic Servo Shaking Table by Using Simulated Annealing Algorithm. Applied Sciences, 8(4), 524. https://doi.org/10.3390/app8040524