On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations




Abstract
:1. Introduction
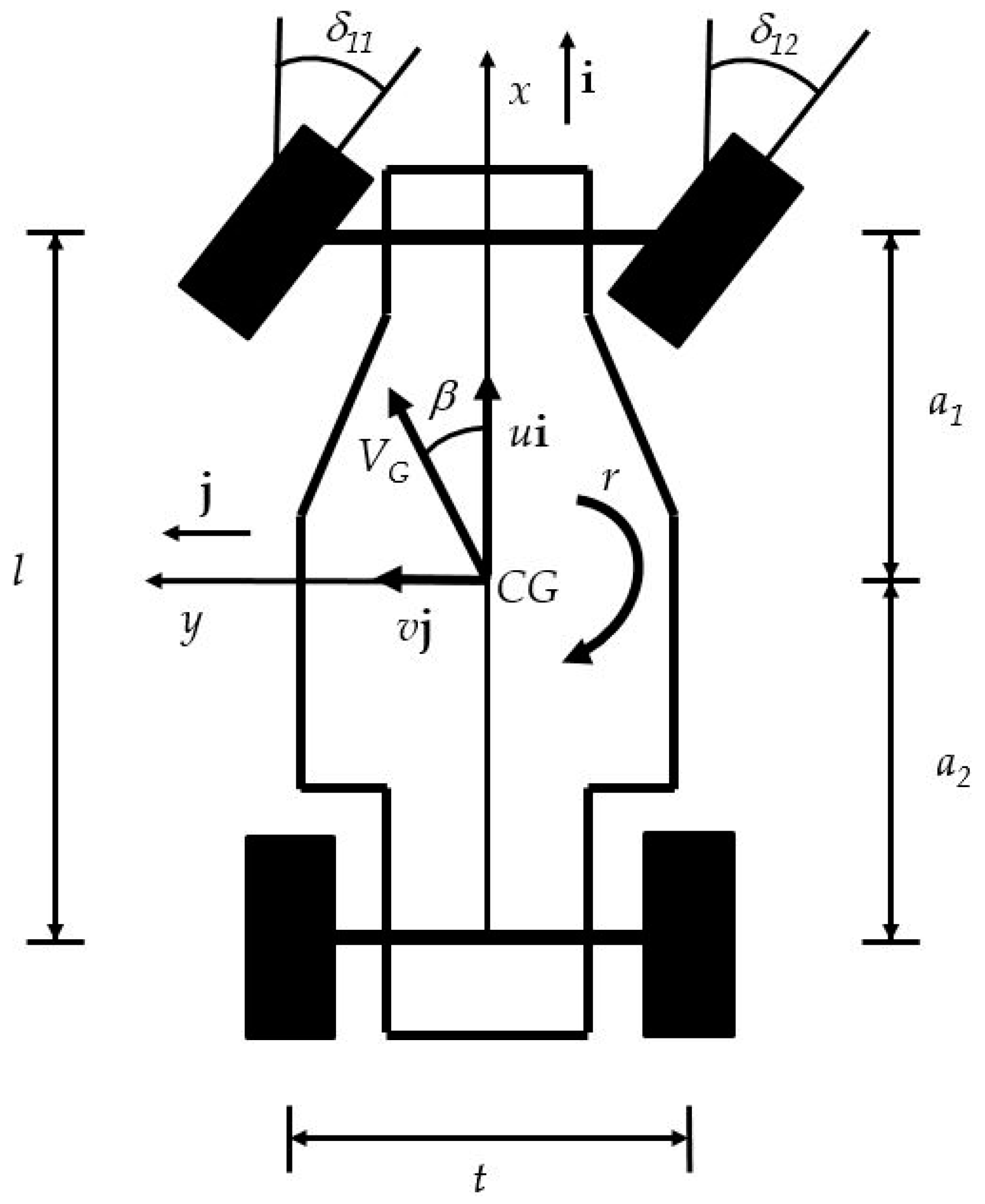
- Observer-based [13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95]: This approach uses a vehicle reference model for state estimators. Results can be accurate either in steady-state or transient vehicle conditions. The need of a model implies that results are strictly related to model complexity, and to the knowledge of its parameters. The most challenging aspects are usually the description of the tyres and their interaction with the road surface. An exhaustive vehicle model for lateral dynamics is normally highly non-linear, with several parameters to be known. Moreover, using a complex non-linear model leads to a significant computational burden required to run the system with its state observer. Several kinds of observers exist in the literature, the Kalman Filter (KF) being the most used one. To enhance observed-based VSA estimation, GPS (Global Positioning System) technology can be used in combination with an observer [68,69,70,71,72,73,74,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95]. GPS technology can determine the position of the receiver without numerical integration. Comparing data from at least four satellites, a GPS receiver is able to find its own global position, and its velocities are then derived using Doppler measurements [68]. As presented later on in this paper, this method already provides satisfactory results, and better results are likely to be achievable due to the expected increase in the accuracy and reduction in cost of the GPS receivers. On the other hand, GPS receivers present issues such as temporary signal unavailability due to surroundings such as trees, tall buildings, and road tunnels, as well as different working frequencies with respect to other sensors involved in vehicle dynamics control (i.e., accelerometers, gyros, etc.) [68].
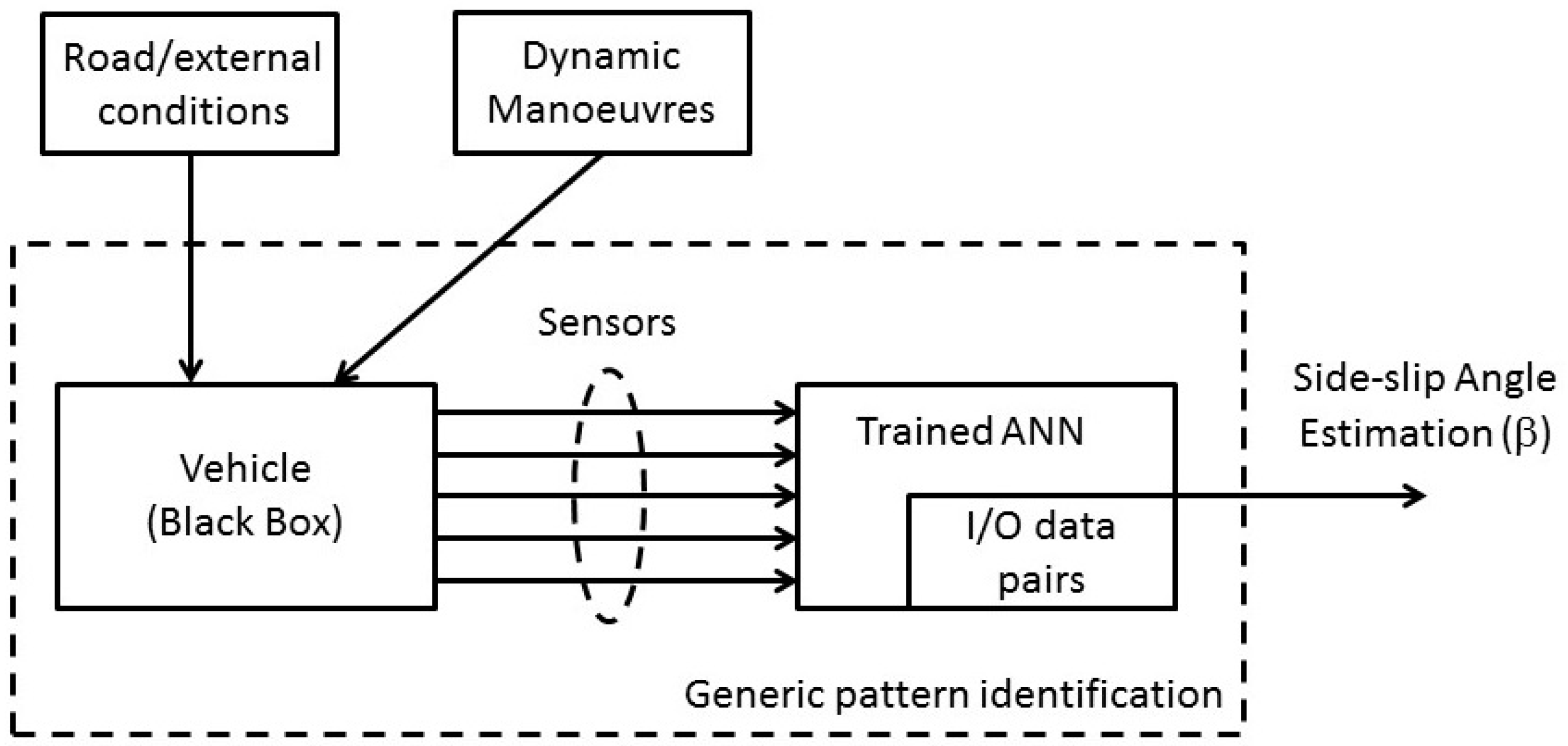
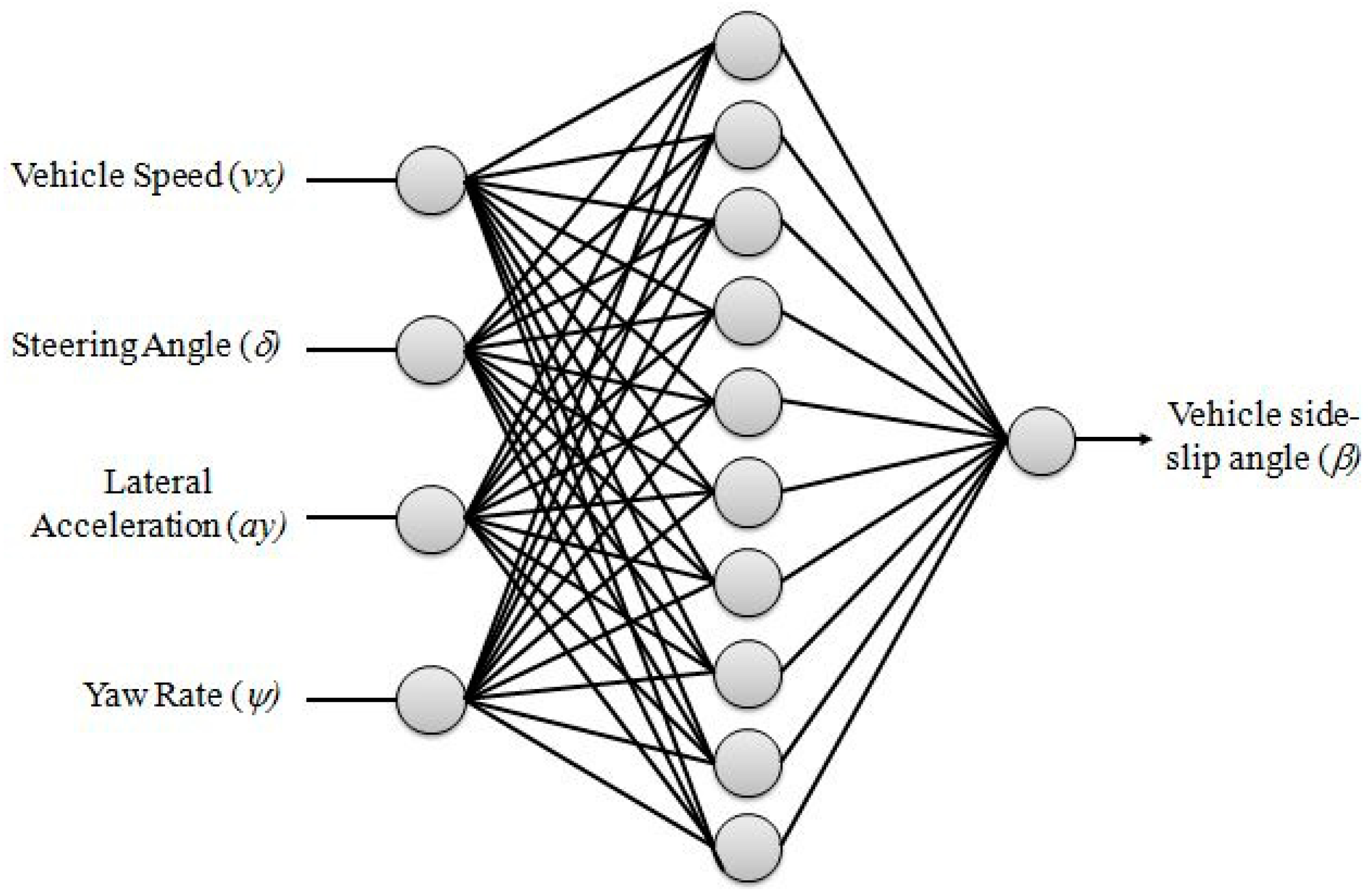
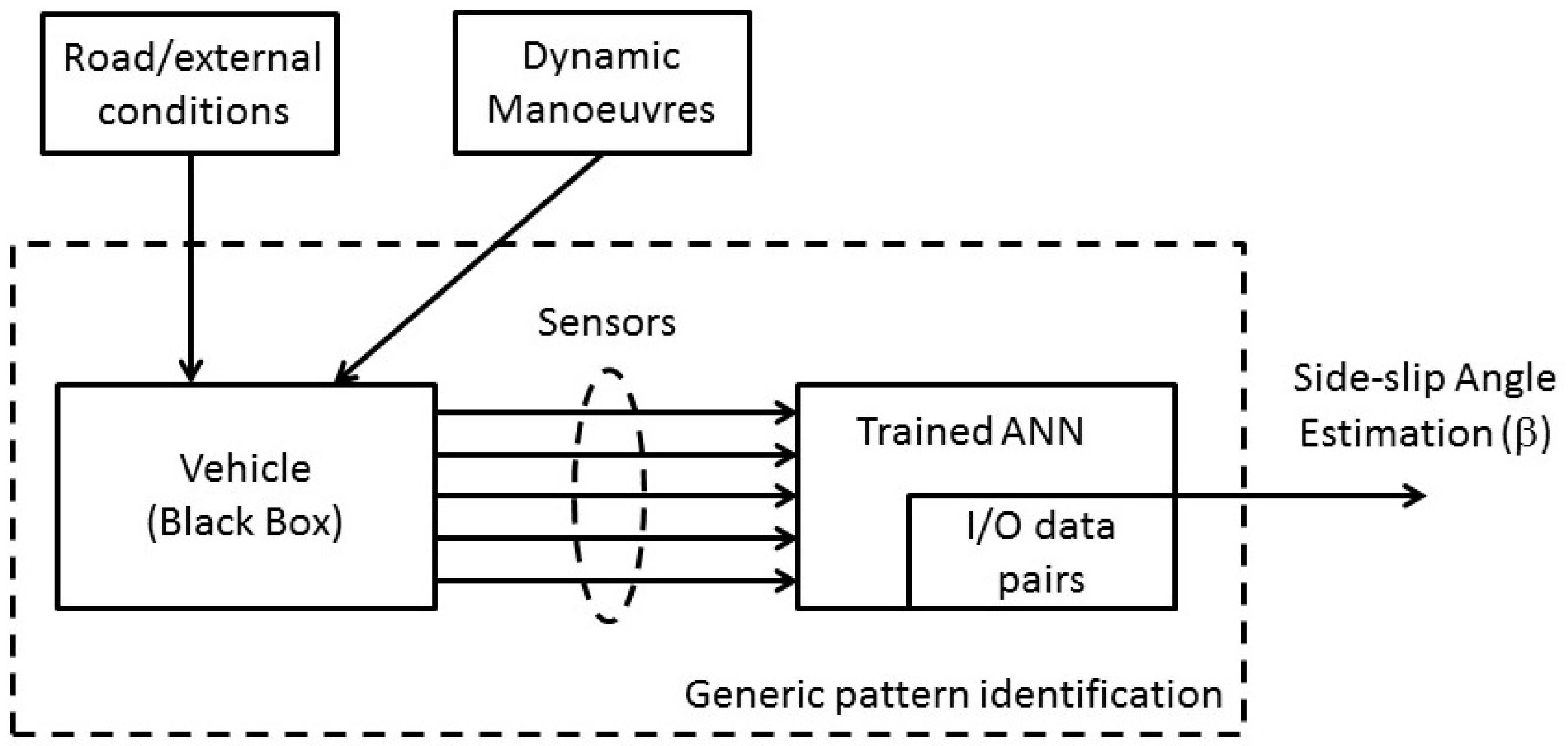
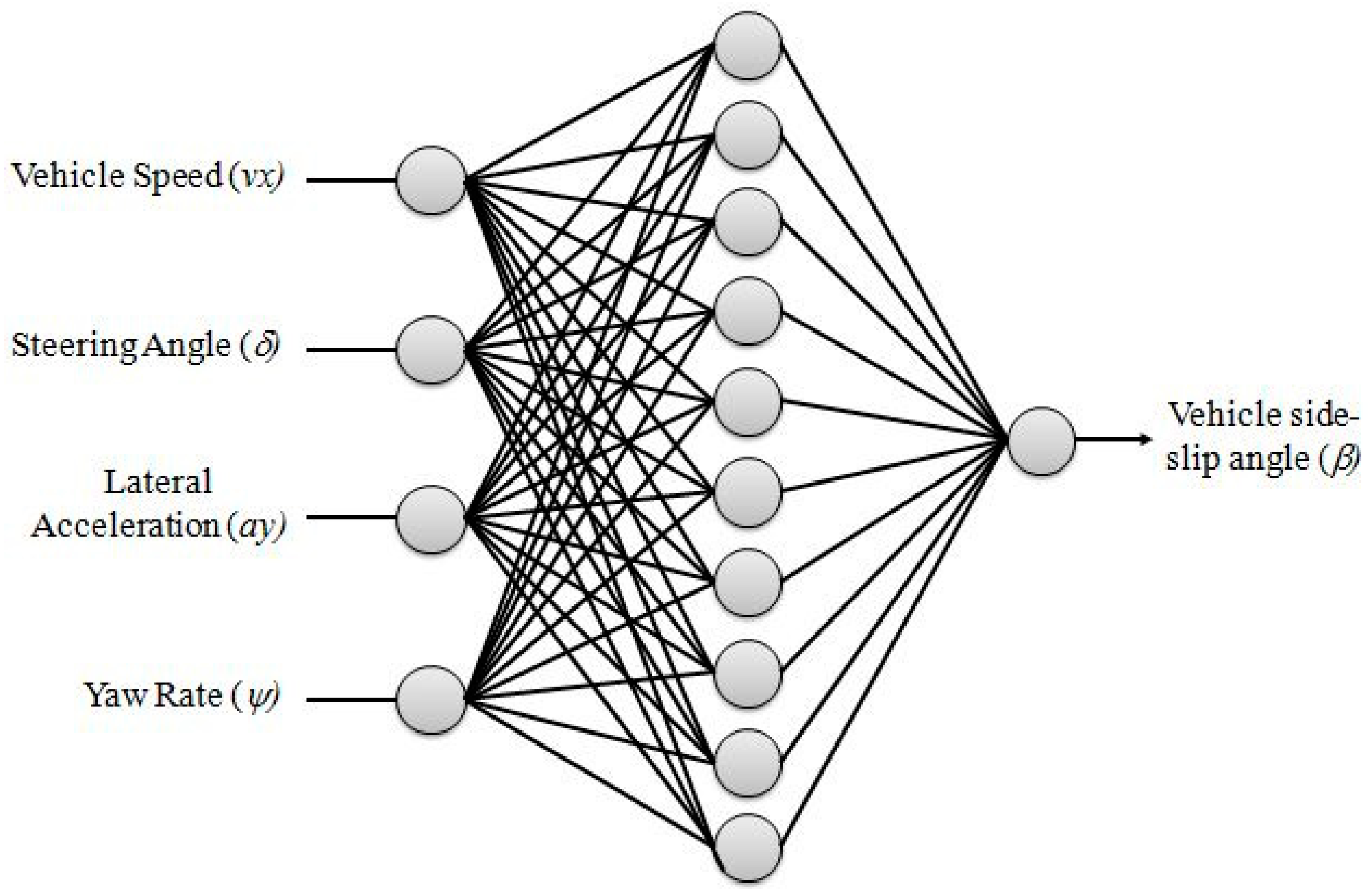
- Neural network-based [96,97,98,99,100,101,102,103,104,105,106,107,108,109,110]: This method is specifically used to overcome the need for a vehicle model of any kind and its related complex set of parameters [101]. Artificial neural networks (ANN) are largely considered effective tools for system modelling, as they are suitable to model complex systems using their ability to identify relationships from input–output data pairs. They also offer decisive advantages such as adaptive learning, fault tolerance, and generalisation. Moreover, in recent years, the development of high speed computers encouraged the application of ANN, which has progressed very quickly. Using an ANN, the vehicle can be considered as a black box system, and only a conventional set of sensors is needed to train/feed the network. In this case, the inputs for the black box are the yaw rate, lateral acceleration, steering angle, and vehicle speed, while the VSA is the output. Estimation results are accurate as much as the training dataset contains the whole possible scenario that the system might have to deal with [96]. This method has a major drawback, consisting in the need of changing the ANN every time the system changes, forcing the user to redo the ANN training procedure. This is probably the reason why the use of ANN seems to be a second choice for VSA estimation. This is reflected in the literature production, where not so many works can be found on this approach.
2. Observer-Based Estimation
2.1. Vehicle Models
2.2. Kalman Filter
2.3. GPS-Aided Estimation
3. Neural Network-Based Estimation
4. Conclusions
Author Contributions
Conflicts of Interest
Nomenclature
| VSA | Vehicle sideslip angle | ESP | Electronic Stability Program |
| VCS | Vehicle Control Systems | GPS | Global Positioning System |
| LO | Luenberger Observer | IS | Inertial Sensors |
| SMO | Sliding Mode Observer | ANN | Artificial Neural Network |
| KF | Kalman Filter | AI | Artificial Intelligence |
| EKF | Extended Kalman Filter | MSE | Mean Squared Error |
| UKF | Unscented Kalman Filter | RBF | Radial Basis Function |
| SCKF | Square-root Cubature Kalman Filter | BP | Back Propagation |
| SCRHKF | Square-root Cubature Based Receding Horizon KF | GRNN | General Regression NN |
| ANFIS | Adaptive Neuro-Fuzzy Inference System | NN | Neural Network |
| Longitudinal acceleration | Centre of gravity-rear axle distance | ||
| Lateral acceleration | Centre of gravity-front axle distance | ||
| Longitudinal speed | Front/rear track | ||
| Lateral speed | Wheelbase | ||
| Tyre slip angle | State vector | ||
| Vehicle slip angle | Output vector | ||
| Overall vehicle speed | Input vector | ||
| Yaw rate | Measurement noise | ||
| Vehicle mass | Process noise | ||
| Tyre longitudinal force | State transition matrix | ||
| Tyre lateral force | Control-input model matrix | ||
| Aerodynamic drag force | Observation model matrix | ||
| Vehicle yaw inertia | Process error covariance matrix | ||
| Yaw moment | Measurements error covar matrix | ||
| Wheel steering angle |
References
- Van Zanten, A.T. Bosch ESP Systems: 5 Years of Experience; Technical Paper 2000-01-1633; SAE International: Warrendale, PA, USA, 2000. [Google Scholar]
- Manning, W.J.; Crolla, D.A. A review of yaw rate and sideslip controllers for passenger vehicles. Trans. Inst. Meas. Control 2007, 29, 117–135. [Google Scholar] [CrossRef]
- Shibahata, Y.; Shimada, K.; Tomari, T. Improvement of vehicle maneuverability by direct yaw moment control. Veh. Syst. Dyn. 1993, 22, 465–481. [Google Scholar] [CrossRef]
- Lenzo, B.; Sorniotti, A.; Gruber, P.; Sannen, K. On the experimental analysis of single input single output control of yaw rate and sideslip angle. Int. J. Automot. Technol. 2017, 18, 799–811. [Google Scholar] [CrossRef]
- Wang, Z.; Montanaro, U.; Fallah, S.; Sorniotti, A.; Lenzo, B. A Gain Scheduled Robust Linear Quadratic Regulator for Vehicle Direct Yaw Moment Control. Mechatronics 2018, in press. [Google Scholar]
- Mastinu, G.; Ploechl, M. Road and Off-Road Vehicle System Dynamics Handbook; Mastinu, G., Ploechl, M., Eds.; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Gritti, G.; Peverada, F.; Orlandi, S.; Gadola, M.; Uberti, S.; Chindamo, D.; Romano, M.; Olivi, A. Mechanical steering gear internal friction: Effects on the drive feel and development of an analytic experimental model for its prediction. In Proceedings of the International Joint Conference on Mechanics, Design Engineering & Advanced Manufacturing, Catania, Italy, 14–16 September 2016; Springer: Cham, Switzerland, 2016; pp. 339–350. [Google Scholar]
- Crema, C.; Depari, A.; Flammini, A.; Vezzoli, A.; Benini, C.; Chindamo, D.; Gadola, M.; Romano, M. Smartphone-based system for vital parameters and stress conditions monitoring for non-professional racecar drivers. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015; IEEE: Piscataway Township, NJ, USA, 2015. [Google Scholar]
- Gillespie, T.D. Fundamentals of Vehicle Dynamics; SAE International: Wattendale, PA, USA, 1992; ISBN 1-56091-199-9. [Google Scholar]
- Marchesin, F.P.; Barbosa, R.S.; Alves, M.A.L.; Gadola, M.; Chindamo, D.; Benini, C. Upright mounted pushrod: The effects on racecar handling dynamics. In The Dynamics of Vehicles on Roads and Tracks: Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics, Graz, Austria, 17–21 August 2015; CRC Press: Boca Raton, FL, USA, 2015; pp. 543–552. [Google Scholar]
- Benini, C.; Gadola, M.; Chindamo, D.; Uberti, S.; Marchesin, F.P.; Barbosa, R.S. The influence of suspension components friction on race car vertical dynamics. Veh. Syst. Dyn. 2017, 55, 338–350. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Should the Desired Heading in Path Following of Autonomous Vehicles be the Tangent Direction of the Desired Path? IEEE Trans. Intell. Transp. Syst. 2015, 16, 3084–3094. [Google Scholar] [CrossRef]
- Best, M.C.; Gordon, T.J.; Dixon, P.J. Extended Adaptive Kalman Filter for Real-time State Estimation of Vehicle Handling Dynamics. Veh. Syst. Dyn. 2000, 34, 57–75. [Google Scholar]
- Datron Technology Home Page. Available online: http://www.datrontechnology.co.uk/ (accessed on 19 September 2017).
- Cheli, F.; Melzi, S.; Sabbioni, E. An adaptive observer for sideslip angle estimation: Comparison with experimental results. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Las Vegas, NV, USA, 4–7 September 2007; ASME: New York, NY, USA, 2007. [Google Scholar]
- Cheli, F.; Sabbioni, E.; Pesce, M.; Melzi, S. A methodology for vehicle sideslip angle identification Comparison with experimental data. Veh. Syst. Dyn. 2007, 45, 549–563. [Google Scholar] [CrossRef]
- Piyabongkarn, D.; Rajamani, R.; Grogg, J.A.; Lew, J.Y. Development and experimental evaluation of a slip angle estimator for vehicle stability control. IEEE Trans. Control Syst. Technol. 2009, 17, 78–88. [Google Scholar] [CrossRef]
- Dakhallah, J.; Glaser, S.; Mammar, S. Vehicle Sideslip Angle Estimation with Stiffness Adaption. Int. J. Veh. Auton. Syst. 2010, 8, 56–79. [Google Scholar] [CrossRef]
- Katriniok, A.; Abel, D. Adaptive EKF-Based Vehicle State Estimation with Online Assessment of Local Observability. IEEE Trans. Control Syst. Technol. 2016, 24, 1368–1381. [Google Scholar] [CrossRef]
- Dakhallah, J.; Imine, H.; Sellami, Y.; Bellot, D. Heavy Vehicle State Estimation and Rollover Risk Evaluation Using Kalman Filter and Sliding Mode Observer. In Proceedings of the European Control Conference, Kos, Greece, 2–5 July 2007; IEEE: Piscataway Township, NJ, USA, 2015. [Google Scholar]
- Chen, Y.; Ji, Y.; Guo, K. A reduced-order nonlinear sliding mode observer for vehicle slip angle and tyre forces. Veh. Syst. Dyn. 2014, 52, 1716–1728. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Lechner, D. Experimental evaluation of a sliding mode observer for tire-road forces and an Extended Kalman Filter for vehicle sideslip angle. In Proceedings of the IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; IEEE: Piscataway Township, NJ, USA, 2007; pp. 3877–3882. [Google Scholar]
- Stéphant, J.; Charara, A.; Meizel, D. Evaluation of a sliding mode observer for vehicle sideslip angle. Control Eng. Pract. 2007, 15, 803–812. [Google Scholar] [CrossRef]
- Gadola, M.; Chindamo, D.; Romano, M.; Padula, F. Development and Validation of a Kalman Filter-Based model for Vehicle Slip Angle Estimation. Veh. Syst. Dyn. 2014, 52, 68–84. [Google Scholar] [CrossRef]
- Stephant, J.; Charara, A.; Meizel, D. Virtual Sensor: Application to Vehicle Sideslip Angle and Transversal Forces. IEEE Trans. Ind. Electron. 2004, 51, 278–289. [Google Scholar] [CrossRef]
- Chen, B.C.; Hsieh, F.C. Sideslip angle estimation using extended Kalman filter. Veh. Syst. Dyn. 2008, 46, 353–364. [Google Scholar] [CrossRef]
- Venhovens, P.J.T.; Naab, K. Vehicle dynamics estimation using Kalman filters. Veh. Syst. Dyn. 1999, 32, 171–184. [Google Scholar] [CrossRef]
- Jiang, K.; Victorino, A.C.; Charara, A. Adaptive Estimation of Vehicle Dynamics Through RLS and Kalman Filter Approaches. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; IEEE: Piscataway Township, NJ, USA, 2015; pp. 1741–1746. [Google Scholar]
- Zhao, L.-H.; Liu, Z.-Y.; Chen, H. Design of a nonlinear observer for vehicle velocity estimation and experiments. IEEE Trans. Control Syst. Technol. 2011, 19, 664–672. [Google Scholar] [CrossRef]
- Luo, W.; Wu, G.; Zheng, S. Design of vehicle sideslip angle observer with parameter adaptation based on HSRI tire model. Automot. Eng. 2013, 33, 249–255+291. [Google Scholar]
- Sen, S.; Chakraborty, S.; Sutradhar, A. Estimation of tire slip-angles for vehicle stability control using Kalman filtering approach. In Proceedings of the 2015 International Conference on Energy, Power and Environment: Towards Sustainable Growth (ICEPE 2015), Meghalaya, India, 12–13 June 2015. Article Number: 7510138. [Google Scholar]
- Grip, H.F.; Imsland, L.; Johansen, T.A.; Kalkkuhl, J.C.; Suissa, A. Vehicle Sideslip Estimation. IEEE Control Syst. Mag. 2009, 29, 36–52. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J. Estimation of Vehicle Speed and Tire-Road Adhesion Coefficient by Adaptive Unscented Kalman Filter. J. Xi’an Jiaotong Univ. 2016, 50, 68–75. [Google Scholar]
- Zhao, W.Z.; Zhang, H.; Wang, C.Y. Estimation of Vehicle State Parameters Based on Unscented Kalman Filtering. J. South China Uni. Technol. 2016. [Google Scholar] [CrossRef]
- Chen, J.; Song, J.; Li, L.; Jia, G.; Ran, X.; Yang, C. UKF-Based Adaptive Variable Structure Observer for Vehicle Sideslip with Dynamic Correction. IET Control Theory Appl. 2016, 10, 1641–1652. [Google Scholar] [CrossRef]
- Antonov, S.; Fehn, A.; Kugi, A. Unscented Kalman Filter for Vehicle State Estimation. Veh. Syst. Dyn. 2011, 49, 1497–1520. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Diaz, V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm. Mech. Syst. Signal Process. 2016, 72–73, 832–845. [Google Scholar] [CrossRef]
- Ren, H.; Chen, S.; Liu, G.; Zheng, K. Vehicle State Information Estimation with the Unscented Kalman Filter. Adv. Mech. Eng. 2014. [Google Scholar] [CrossRef]
- Zhao, Y.; Lin, F. Vehicle State Estimation Based on Unscented Kalman Filter Algorithm. China Mech. Eng. 2010, 21, 615–619, 629. [Google Scholar]
- Li, J.; Zhang, J. Vehicle Sideslip Angle Based on Hybrid Kalman Filter. Math. Probl. Eng. 2016, 1–10. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, D.; Hu, X. Comments on Performance Evaluation of UKF-based Nonlinear Filtering. Automatica 2007, 43, 567–568. [Google Scholar] [CrossRef]
- Xiong, K.; Zhang, H.Y.; Chan, C.W. Author’s Reply to: ‘Comments on Performance Evaluation of UKF-based Nonlinear Filtering’. Automatica 2007, 43, 569–570. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Wannasuphoprasit, W. Kinematic-Based Analytical Solution for Wheel Slip Angle Estimation of a RWD Vehicle with Drift. Eng. J. 2015, 20, 89–107. [Google Scholar] [CrossRef]
- Kang, C.M.; Lee, S.-H.; Chung, C.C. Comparative evaluation of dynamic and kinematic vehicle models. In Proceedings of the IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 648–653. [Google Scholar]
- Farrelly, J.; Wellstead, P. Estimation of Lateral Velocity. In Proceedings of the IEEE International Conference on control Applications, Derborn, MI, USA, 15 September–18 November 1996; pp. 552–557. [Google Scholar]
- Du, H.; Lam, J.; Cheung, K.C.; Li, W.; Zhang, N. Side-Slip Angle Estimation and Stability Control for a Vehicle with a Non-Linear Tyre Model and a Varying Speed. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2015, 229, 486–505. [Google Scholar] [CrossRef]
- Saadeddin, K.; Abdel-Hafez, M.F.; Jaradat, M.A.; Jarrah, M.A. Performance Enhancement of Low-Cost, High-Accuracy, State Estimation for Vehicle Collision Prevention System Using ANFIS. Mech. Syst. Signal Process. 2013, 41, 239–253. [Google Scholar] [CrossRef]
- Ungoren, A.Y.; Peng, H.; Tseng, H.E. A Study on Lateral Speed Estimation Method. Int. J. Veh. Auton. Syst. 2004, 2, 126–144. [Google Scholar] [CrossRef]
- Wang, W.; Bei, S.; Zhu, K.; Zhang, L.; Wang, Y. Vehicle state and parameter estimation based on adaptive cubature Kalman filter. ICIC Express Lett. 2016, 10, 1871–1877. [Google Scholar]
- Chen, C.-K.; Le, A.-T. Vehicle side-slip angle and lateral force estimator based on extended Kalman filtering algorithm. In AETA 2015: Recent Advances in Electrical Engineering and Related Sciences; Lecture Notes in Electrical Engineering; Springer: Berlin, Germany, 2015; Volume 371, pp. 377–388. [Google Scholar]
- Hrgetić, M.; Deur, J.; Ivanovic, V.; Tseng, E. Vehicle Sideslip Angle EKF Estimator based on Nonlinear Vehicle Dynamics Model and Stochastic Tire Forces Modelling. SAE Int. J. Passeng. Cars Mech. Syst. 2014, 7, 86–95. [Google Scholar] [CrossRef]
- Grip, H.F.; Imsland, L.; Johansen, T.A.; Fossen, T.I.; Kalkkuhl, J.C.; Suissa, A. Nonlinear vehicle side-slip estimation with friction adaptation. Automatica 2008, 44, 611–622. [Google Scholar] [CrossRef]
- Baffet, G.; Charara, A.; Stéphant, J. Sideslip angle, lateral tire force and road friction estimation in simulations and experiments. In Proceedings of the IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 903–908. [Google Scholar]
- Ma, Z.; Ji, X.; Zhang, Y.; Yang, J. State estimation in roll dynamics for commercial vehicles. Veh. Syst. Dyn. 2017, 55, 313–317. [Google Scholar] [CrossRef]
- Syed, U.H.; Vigliani, A. Vehicle side slip and roll angle estimation. In Proceedings of the SAE World Congress & Exhibition 2016, Detroit, MI, USA, 12–14 April 2016. [Google Scholar] [CrossRef]
- Chung, S.; Lee, H. Vehicle sideslip estimation and compensation for banked road. Int. J. Automot. Technol. 2016, 17, 63–69. [Google Scholar] [CrossRef]
- Jiang, K.; Victorino, A.C.; Charara, A. Real-time estimation of vehicle’s lateral dynamics at inclined road employing extended Kalman filter. In Proceedings of the 2016 IEEE 11th Conference on Industrial Electronics and Applications (ICIEA 2016), Hefei, China, 5–7 June 2016; pp. 2360–2365. [Google Scholar]
- You, S.-H.; Hahn, J.-O.; Lee, H. New adaptive approaches to real-time estimation of vehicle sideslip angle. Control Eng. Pract. 2009, 17, 1367–1379. [Google Scholar] [CrossRef]
- Cherouat, H.; Braci, M.; Diop, S. Vehicle velocity, side slip angles and yaw rate estimation. In Proceedings of the IEEE International Symposium on Industrial Electronics, Dubrovnik, Croatia, 20–23 June 2015; IEEE: Piscataway Township, NJ, USA; pp. 349–354. [Google Scholar]
- Liu, W.; Liu, W.; Ding, H.; Guo, K. Side-slip angle estimation for vehicle electronic stability control based on sliding mode observer. In Proceedings of the 2012 International Conference on Measurement, Information and Control (MIC 2012), Harbin, China, 18–20 May 2012; pp. 992–995. [Google Scholar]
- Geng, C.; Liu, L.; Hori, Y. Adaptive design of body slip angle estimation for electric vehicle stability control. In Proceedings of the EVS 2010—Sustainable Mobility Revolution: 25th World Battery, Hybrid and Fuel Cell Electric Vehicle Symposium and Exhibition, Shenzhen, China, 5–9 November 2010; pp. 266–272. [Google Scholar]
- Ryu, J.; Nardi, F.; Moshchuk, N. Vehicle sideslip angle estimation and experimental validation. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition (IMECE), San Diego, CA, USA, 15–21 November 2013; pp. 42–52. [Google Scholar]
- Imsland, L.; Johansen, T.A.; Fossen, T.I.; Kalkkuhl, J.C.; Suissa, A. Vehicle velocity estimation using modular nonlinear observers. In Proceedings of the 44th IEEE Conference on Decision and Control, and the European Control Conference (CDC-ECC‘05), Sevilla, Spain, 12–15 December 2005; pp. 6728–6733. [Google Scholar]
- Zong, C.-F.; Hu, D.; Yang, X.; Pan, Z.; Xu, Y. Vehicle driving state estimation based on extended Kalman filter. J. Jilin Univ. (Eng. Technol. Ed.) 2009, 39, 7–11. [Google Scholar]
- Bao, R.; Jia, M.; Sabbioni, E.; Yu, H. Vehicle state and parameter estimation under driving situation based on extended kalman particle filter method. Trans. Chin. Soc. Agric. Mach. 2015, 46, 301–306. [Google Scholar]
- Fukada, Y. Slip-angle estimation for vehicle stability control. Veh. Syst. Dyn. 1999, 32, 375–388. [Google Scholar] [CrossRef]
- Limroth, J.C.; Kurfess, T. Real-time vehicle parameter estimation and equivalent moment electronic stability control. Int. J. Veh. Des. 2015, 68, 221–244. [Google Scholar] [CrossRef]
- Tin Leung, K.; Whidborne, J.F.; Purdy, D.; Dunoyer, A. A Review of Ground Vehicle Dynamic State Estimations Utilising GPS-INS. Veh. Syst. Dyn. 2011, 49, 29–58. [Google Scholar] [CrossRef]
- Ryu, J.; Gerdes, J.C. Integrating inertial sensors with Global Positioning System (GPS) for vehicle dynamics control. J. Dyn. Syst. Meas. Contr. 2004, 126, 243–254. [Google Scholar] [CrossRef]
- Bevly, D.M.; Sheridan, R.; Gerdes, J.C. Integrating INS sensors with GPS velocity measurements for continuous estimation of vehicle sideslip and tire cornering stiffness. IEEE Intell. Transp. Syst. Soc. 2001, 1, 25–30. [Google Scholar]
- Bevly, D.M. Global Positioning System (GPS): A low-cost velocity sensor for correcting inertial sensor errors on ground vehicles. J. Dyn. Syst. Meas. Contr. 2004, 126, 255–264. [Google Scholar] [CrossRef]
- Gao, J. GPS/INS/G sensors/yaw rate sensor/wheel speed sensors integrated vehicular positioning system. In Proceedings of the 19th International Technical Meeting of the Satellite Division of The Institute of Navigation, Fort Worth, TX, USA, 26–29 September 2006; pp. 1427–1439. [Google Scholar]
- He, B. Precise navigation for a 4WS mobile robot. J. Zhejiang Univ. Sci. A 2006, 7, 185–193. [Google Scholar] [CrossRef]
- Travis, W.; Bevly, D.M. Compensation of vehicle dynamic induced navigation errors with dual antenna GPS attitude measurements. Int. J. Model. Ident. Control 2008, 3, 212–224. [Google Scholar] [CrossRef]
- Rock, K.L.; Beiker, S.A.; Laws, S.; Gerdes, J.C. Validating GPS based measurements for vehicle control. In Proceedings of the ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, FL, USA, 5–11 November 2005; ASME: New York, NY, USA, 2005; pp. 583–592. [Google Scholar]
- Weiwen, D.; Haicen, Z. RLS-based online estimation on vehicle linear sideslip. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 3960–3965. [Google Scholar]
- Dissanayake, G.; Sukkarieh, S.; Nebot, E.; Durrant-Whyte, H. The aiding of a low-cost strapdown inertial measurement unit using vehicle model constraints for land vehicle applications. IEEE Trans. Rob. Autom. 2001, 17, 731–747. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H. Vehicle dynamics control based on low cost GPS. In Proceedings of the 2010 IEEE International Conference on Information and Automation, Harbin, China, 20–23 June 2010; pp. 365–373. [Google Scholar]
- Daily, R.; Bevly, D.M. The use of GPS for vehicle stability control systems. IEEE Trans. Ind. Electron. 2004, 51, 270–277. [Google Scholar] [CrossRef]
- Bevly, D.M.; Gerdes, J.C.; Wilson, C.; Zhang, G.S. Use of GPS based velocity measurements for improved vehicle state estimation. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; IEEE: Piscataway Township, NJ, USA, 2000; pp. 2538–2542. [Google Scholar]
- Bevly, D.M.; Gerdes, J.C.; Wilson, C. The Use of GPS Based Velocity Measurements for Measurement of Sideslip and Wheel Slip. Veh. Syst. Dyn. 2002, 38, 127–147. [Google Scholar]
- Ryu, J.; Rossetter, J.; Gerdes, J. Vehicle sideslip and roll parameter estimation using GPS. In Proceedings of the AVEC 2002 6th Interntional Symposium on Advanced Vehicle Control, Hiroshima, Japan, 9–13 September 2002; pp. 260–268. [Google Scholar]
- Bevly, D.M.; Ryu, J.; Gerdes, J.C. Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip, roll, and tire cornering stiffness. IEEE Trans. Intell. Transp. Syst. 2006, 7, 483–493. [Google Scholar] [CrossRef]
- He, B.; Wang, D.; Pham, M.; Yu, T. Position and orientation estimation with high accuracy for a car-like vehicle. In Proceedings of the IEEE Conference on Intelligent Transportation Systems ITSC, Singapore, 6 September 2002; pp. 528–533. [Google Scholar]
- Anderson, R.; Bevly, D.M. Estimation of tire cornering stiffness using GPS to improve model based estimation of vehicle states. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 801–806. [Google Scholar]
- Bae, H.; Ryu, J.; Gerdes, J. Road grade and vehicle parameter estimation for longitudinal control using GPS. In Proceedings of the IEEE Conference on Intelligent Transport Systems, Oakland, CA, USA, 25–29 August 2001; pp. 166–171. [Google Scholar]
- Leung, K.; Whidborne, J.; Purdy, D.; Dunoyer, A.; Williams, R. A study on the effect of GPS accuracy on a GPS/INS Kalman filter. In Proceedings of the UKACC 2008 International Conference on Control, Manchester, UK, 2–4 September 2008; pp. 106–112. [Google Scholar]
- Jwo, D.-J.; Yang, C.-F.; Chuang, C.-H.; Lee, T.-Y. Performance enhancement for ultra-tight GPS/INS integration using a fuzzy adaptive strong tracking unscented Kalman filter. Nonlinear Dyn. 2013, 73, 377–395. [Google Scholar] [CrossRef]
- Barbosa, D.; Lopes, A.; Araújo, R.E. Sensor fusion algorithm based on Extended Kalman Filter for estimation of ground vehicle dynamics. In Proceedings of the IECON (Industrial Electronics Conference), Florence, Italy, 24–27 October 2016; pp. 1049–1054. [Google Scholar]
- Jo, K.; Kim, J.; Sunwoo, M. Real-time road-slope estimation based on integration of onboard sensors with GPS using an IMMPDA filter. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1718–1732. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Y.; King, M.; Shi, Q.; Wang, C.; Li, P. Identification methods of key contributing factors in crashes with high numbers of fatalities and injuries in China. Traffic Inj. Prev. 2016, 17, 878–883. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, B.-M.; Wang, Y.; Fujimoto, H.; Hori, Y. Lateral stability control of electric vehicle based on disturbance accommodating kalman filter using the integration of single antenna GPS receiver and yaw rate sensor. J. Electr. Eng. Technol. 2013, 8, 899–910. [Google Scholar] [CrossRef]
- Yoon, J.-H.; Eben Li, S.; Ahn, C. Estimation of vehicle sideslip angle and tire-road friction coefficient based on magnetometer with GPS. Int. J. Automot. Technol. 2016, 17, 427–435. [Google Scholar] [CrossRef]
- Veluvolu, K.C.; Rath, J.J.; Defoort, M.; Soheee, Y.C. Estimation of side slip and road bank angle using high-gain observer and higher-order sliding mode observer. In Proceedings of the 2015 International Workshop on Recent Advances in Sliding Modes (RASM), Istanbul, Turkey, 9–11 April 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Leung, K.; Whidbome, J.; Purdy, D.; Dunoyer, A. Ideal Vehicle Sideslip Estimation Using Consumer grade GPS and INS. SAE (Intell. Veh. Init. (IVI) Technol. Adv. Controls) 2009. [Google Scholar] [CrossRef]
- Melzi, S.; Sabbioni, E. On the Vehicle Sideslip Angle Estimation Through Neural Networks Numerical and Experimental Results. Mech. Syst. Signal Process. 2011, 25, 2005–2019. [Google Scholar] [CrossRef]
- Du, X.; Sun, H.; Qian, K.; Li, Y.; Lu, L. A prediction model for vehicle sideslip angle based on neural network. In Proceedings of the 2nd IEEE International Conference on Information and Financial Engineering (ICIFE), Chongqing, China, 17–19 September 2010; pp. 451–455. [Google Scholar]
- Hideaki, S.; Takatoshi, N. A sideslip angle estimation using neural network for a wheeled vehicle. In Proceedings of the SAE International, SAE World Congress 2000, Detroit, MI, USA, 6–9 March 2000. SAE Technical Paper 2000-01-0695. [Google Scholar] [CrossRef]
- Yu, R. Simulation Research on Vehicle Handling Inverse Dynamics Based on Radial Basis Function Neural Networks. Appl. Mech. Mater. 2014, 484, 1093–1097. [Google Scholar] [CrossRef]
- Shuming, S.; Lupker, H.; Bremmer, P. Estimation of sideslip angle based on fuzzy logic. Automot. Eng. 2005, 27, 426–430. [Google Scholar]
- Chindamo, D.; Gadola, M.; Benini, C.; Romano, M. Estimation of Vehicle Side-Slip Angle Using an Artificial Neural Network. In Proceedings of the ICMAA 2018 Conference, Singapore, 24–28 February 2018. [Google Scholar]
- Melzi, S.; Sabbioni, E.; Concas, A.; Pesce, M. Vehicle sideslip angle estimation through neural networks Application to numerical data. In Proceedings of the ASME 8th Biennial Conference on Engineering System Design and Analysis, Torino, Italy, 4–7 July 2006; pp. 167–172. [Google Scholar]
- Gurney, K. Introduction to Neural Networks; Taylor & Francis: Abingdon, UK, 2004; ISBN 1-85728-673-1. [Google Scholar]
- Broderick, D.J.; Bevly, D.M.; Hung, J.Y. An adaptive non-linear state estimator for vehicle lateral dynamics. In Proceedings of the IECON, Porto, Portugal, 3–5 November 2009; pp. 1450–1455. [Google Scholar]
- Yu, R.; Xia, X. Vehicle handling evaluation models using artificial neural networks. Int. J. Control Autom. 2015, 8, 249–258. [Google Scholar] [CrossRef]
- Wei, W.; Shaoyi, B.; Lanchun, Z.; Kai, Z.; Yongzhi, W.; Weixing, H. Vehicle Sideslip Angle Estimation Based on General Regression Neural Network. Math. Probl. Eng. 2016, 2016. [Google Scholar] [CrossRef]
- Acosta, M.; Kanarachos, S. Tire lateral force estimation and grip potential identification using neural networks, extended Kalman filter and recursive least squares. Neural Comput. Appl. 2017, 1–21. [Google Scholar] [CrossRef]
- Dye, J.; Lankarani, H. Hybrid simulation of a dynamic multibody vehicle suspension system using neural network modeling fit of tire data. In Proceedings of the ASME Design Engineering Technical Conference, Charlotte, NC, USA, 21–24 August 2016. [Google Scholar] [CrossRef]
- Alagappan, A.V.; Rao, K.V.N.; Kumar, R.K. A comparison of various algorithms to extract Magic Formula tyre model coefficients for vehicle dynamics simulations. Veh. Syst. Dyn. 2015, 53, 154–178. [Google Scholar] [CrossRef]
- Huang, C.; Chen, L.; Jiang, H.; Yuan, C.; Xia, T. Fuzzy chaos control for vehicle lateral dynamics based on active suspension system. Chin. J. Mech. Eng. Educ. 2014, 27, 793–801. [Google Scholar] [CrossRef]
- Ding, N.; Chen, W.; Zhang, Y.; Xu, G.; Gao, F. An extended Luenberger observer for estimation of vehicle sideslip angle and road friction. Int. J. Veh. Des. 2014, 66, 385–414. [Google Scholar] [CrossRef]
- Taha, A.F.; Qi, J.; Wang, J.; Panchal, J.H. Dynamic State Estimation under Cyber Attacks: A Comparative Study of Kalman Filters and Observers. arXiv, 2015; arXiv:1508.07252. [Google Scholar]
- Guiggiani, M. The Science of Vehicle Dynamics: Handling, Braking, and Ride of Road and Race Cars; Springer Science & Business Media: Berlin, Germany, 2014. [Google Scholar] [CrossRef]
- Bettini, A. A Course in Classical Physics 1—Mechanics; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Genta, G. Motor Vehicle Dynamics: Modeling and Simulation; World Scientific: Singapore, 1997. [Google Scholar]
- Selmanaj, D.; Corno, M.; Panzani, G.; Savaresi, S.M. Robust Vehicle Sideslip Estimation Based on Kinematic Considerations. IFAC-PapersOnLine 2017, 50, 14855–14860. [Google Scholar] [CrossRef]
- Soo, J. State Estimation Based on Kinematic Models Considering Characteristics of Sensors. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 640–645. [Google Scholar]
- Ouahi, M.; Stéphant, J.; Meizel, D. Simultaneous observation of the wheels’ torques and the vehicle dynamic state. Veh. Syst. Dyn. 2013, 51, 737–766. [Google Scholar] [CrossRef]
- Parker, G.; Griffin, J.; Popov, A. The effect on power consumption & handling of efficiency-driven active torque distribution in a four wheeled vehicle. In The Dynamics of Vehicles on Roads and Tracks: Proceedings of the 24th Symposium of the International Association for Vehicle System Dynamics (IAVSD 2015), Graz, Austria, 17–21 August 2015; CRC Press: Boca Raton, FL, USA, 2016; p. 97. [Google Scholar]
- Naets, F.; van Aalst, S.; Boulkroune, B.; El Ghouti, N.; Desmet, W. Design and Experimental Validation of a Stable Two Stage Estimator for Automotive Sideslip Angle and Tire Parameters. IEEE Trans. Veh. Technol. 2017, 66, 9727–9742. [Google Scholar] [CrossRef]
- Ryu, J.; Gerdes, J.C. Estimation of vehicle roll and road bank angle. In Proceedings of the American Control Conference, Boston, MA, USA, 30 June–2 July 2004; Volume 3, pp. 2110–2115. [Google Scholar]
- Ahangarnejad, A.H.; Başlamışlı, S.Ç. Adap-tyre: DEKF filtering for vehicle state estimation based on tyre parameter adaptation. Int. J. Veh. Des. 2016, 71, 52–74. [Google Scholar] [CrossRef]
- Dakhlallah, J.; Glaser, S.; Mammar, S.; Sebsadji, Y. Tire-road forces estimation using extended Kalman filter and sideslip angle evaluation. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4597–4602. [Google Scholar]
- Huang, X.; Wang, J. Robust sideslip angle estimation for lightweight vehicles using smooth variable structure filter. In Proceedings of the 2013 ASME Dynamic Systems and Control Conference, Palo Alto, CA, USA, 21–23 October 2013. [Google Scholar] [CrossRef]
- Farroni, F.; Sakhnevych, A.; Timpone, F. Physical modelling of tire wear for the analysis of the influence of thermal and frictional effects on vehicle performance. J. Mater. Des. Appl. 2017, 231, 151–161. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter. Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.295.178&rep=rep1&type=pdf (accessed on 21 February 2018).
- Kandepu, R.; Foss, B.; Imsland, L. Applying the unscented Kalman filter for nonlinear state estimation. J. Process Control 2008, 18, 753–768. [Google Scholar] [CrossRef]
- Chindamo, D.; Economou, J.T.; Gadola, M.; Knowles, K. A neurofuzzy-controlled power management strategy for a series hybrid electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 1034–1050. [Google Scholar] [CrossRef]
- Levenberg, K. A Method for the Solution of Certain Problems in Least-Squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. SIAM J. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Method Detail | Robustness | Model | Simulations | Experiments | Ref. |
|---|---|---|---|---|---|---|
| LO | VSA and other state variables estimated using this observer in its linear or non-linear form, according to the type of vehicle model adopted | High robustness to model uncertainty and system noise | Dynamic—both linear and non-linear | yes | yes | [59,60,111,112] |
| SMO | VSA and other state variables estimated using this observer in its linear or non-linear form, according to the type of vehicle model adopted. SMO features a faster convergence speed than EKF, because it does not need to deal with massive matrix computation. | High robustness to model uncertainty and system noise | Dynamic—both linear and non-linear | yes | yes | [20,21,22,23,60] |
| KF/EKF, Kinematic | This observer is consolidated, and it is simple to be implemented. The kinematic model is of easier implementation if compared with the dynamic model, but generally less accurate. Usually in this case, GPS measurements are used to enhance estimation. | High against changes of parameters/conditions | Kinematic | yes | yes | [40,43,44,45,46,47,48,79,80,81] |
| KF/EKF, Dynamic | The most used. This observer is consolidated and it is simple to be implemented, robust, stable, and able to deal with input and measurement noise. | High against input and measurement noise. Low against changes of parameters/conditions. | Dynamic—linear or non-linear | yes | yes | [13,16,17,18,19,24,25,26,27,28,29,30,31,32,47,48,50,51,52,53,54,55,56,57,58,61,62,63,64,65,66,67,120] |
| UKF | Developed from EKF recently. It requires a smaller computational burden with the same estimation accuracy. This makes this method more suitable for real-time applications. | High against input and measurement noise. | Dynamic—non-linear. A full vehicle model can be used due to the small computational burden required | yes | yes | [33,34,35,36,37,38,39,40,41,42,43,46,127] |
| SCKF | Derived from EKF. It numerically approximates the multidimensional integrals by means of a third-degree spherical-radial cubature rule. It has proper estimation accuracy and convergence speed. | Low robustness against model uncertainty and measurement noise. | Dynamic—non-linear | yes | yes | [41,42,49] |
| SCRHKF | Derived from EKF and SCKF, but it uses a finite number of measurements to reduce computational effort; however, this leads to a poor convergence speed. | High robustness against uncertainty and measurement noise. | Dynamic—non-linear | yes | yes | [40,41,42,49] |
| SCKF + SCRHKF | These two observers have complementary features with each other while overcoming their issues. This hybrid estimator is more accurate on average, with a good convergence speed. However, this approach has a computational effort issue. | High robustness against uncertainty and measurement noise. | Dynamic—non-linear | no | yes | [40,67] |
| GPS+IS | VSA estimated by fusing data from IS and GPS (a dual antenna setup is better). With a kinematic vehicle model, the need of detailed physical parameters is avoided. | High robustness against changes of parameters/conditions, but low against measurement noise. | Kinematic—Only a simple set of few parameters is required | no | yes | [68,69,70,71,72,73,74] |
| GPS+OBSERVER | VSA estimated using data from a dual GPS antenna setup, and a dynamic model with an observer to provide continue estimation during GPS outages. | High—the observer (usually an EKF) gives high robustness against input and measurement noise. | Dynamic—Bicycle model with linear tyres | no | yes | [68,75,76,77,78,79,80,81,82,83,84,85,86,87,88,89,90,91,92,93,94,95] |
| ANN | No need of a complex vehicle model, and no errors due to integration of signals with noise. VSA estimated by a three-layered neural network where the first and second layer’s neurons use the log-sigmoid transfer function. | Very low against system and external condition changes (i.e., grip). When the network is properly trained, it can be robust against measurement noise. | None | yes | yes | [96,97,98,99,100,101,102,103,104,105,106,107,108,109,110] |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chindamo, D.; Lenzo, B.; Gadola, M. On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Appl. Sci. 2018, 8, 355. https://doi.org/10.3390/app8030355
Chindamo D, Lenzo B, Gadola M. On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Applied Sciences. 2018; 8(3):355. https://doi.org/10.3390/app8030355
Chicago/Turabian StyleChindamo, Daniel, Basilio Lenzo, and Marco Gadola. 2018. "On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations" Applied Sciences 8, no. 3: 355. https://doi.org/10.3390/app8030355
APA StyleChindamo, D., Lenzo, B., & Gadola, M. (2018). On the Vehicle Sideslip Angle Estimation: A Literature Review of Methods, Models, and Innovations. Applied Sciences, 8(3), 355. https://doi.org/10.3390/app8030355