Designing the Mind of a Social Robot

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
We have found that individuals’ interaction with computers, television and new media are fundamentally social and natural, just like interactions in real life. [...] Everyone expects media to obey a wide range of social and natural rules. All these rules come from the world of interpersonal interaction, and from studies [on] how people interact with [the] real world. But all of them apply equally well to media...”(The Media Equation Theory, Revees and Nass 1996) [1].
2. The Mind of a Social Robot
“Mind is not something disembodied, it is something that is, in total, essential, [and] intrinsic ways, embodied. There would not be a mind if you did not have in the brain the possibility of constructing maps of our own organism [...] you need the maps in order to portray the structure of the body, portray the state of the body, so that the brain can construct a response that is adequate to the structure and state and generate some kind of corrective action.”
Requirements
- [R. 1] a distributed modular architecture that allows for the design of a system with multiple abstract and physical layers, with parallel processing and distributed computational loads;
- [R. 2] an imperative control architecture aimed at controlling low-level procedures such as motor control, sensor reading, kinematics calculation, and signal processing;
- [R. 3] a hardware platform robot-independent low-level control architecture that can be easily adapted to various robotics platforms and consequently used in various research, commercial, and therapeutic setups;
- [R. 4] a deliberative reasoning high-level architecture aimed at implementing the robot’s behavioral and emotional models;
- [R. 5] a pattern-matching engine able to conduct search and analysis procedures that are not necessarily describable with Boolean comparisons or mathematical analyses;
- [R. 6] an intuitive and easy-to-use behavior definition language that allows neuroscientists and behavioral psychologists to easily convert their theoretical models into executable scripts in the cognitive architecture;
- [R. 7] a high-level perception system aimed at extracting high-level social, emotional, and empathic parameters from the perceived scene, with particular focus on the interpretation of humans’ emotional and behavioral signs;
- [R. 8] an object-oriented meta-data communication and storage system on which data of heterogeneous categories can be easily managed and elaborated;
3. Robot Control Paradigms and Cognitive Architectures
3.1. The Hierarchical Paradigm
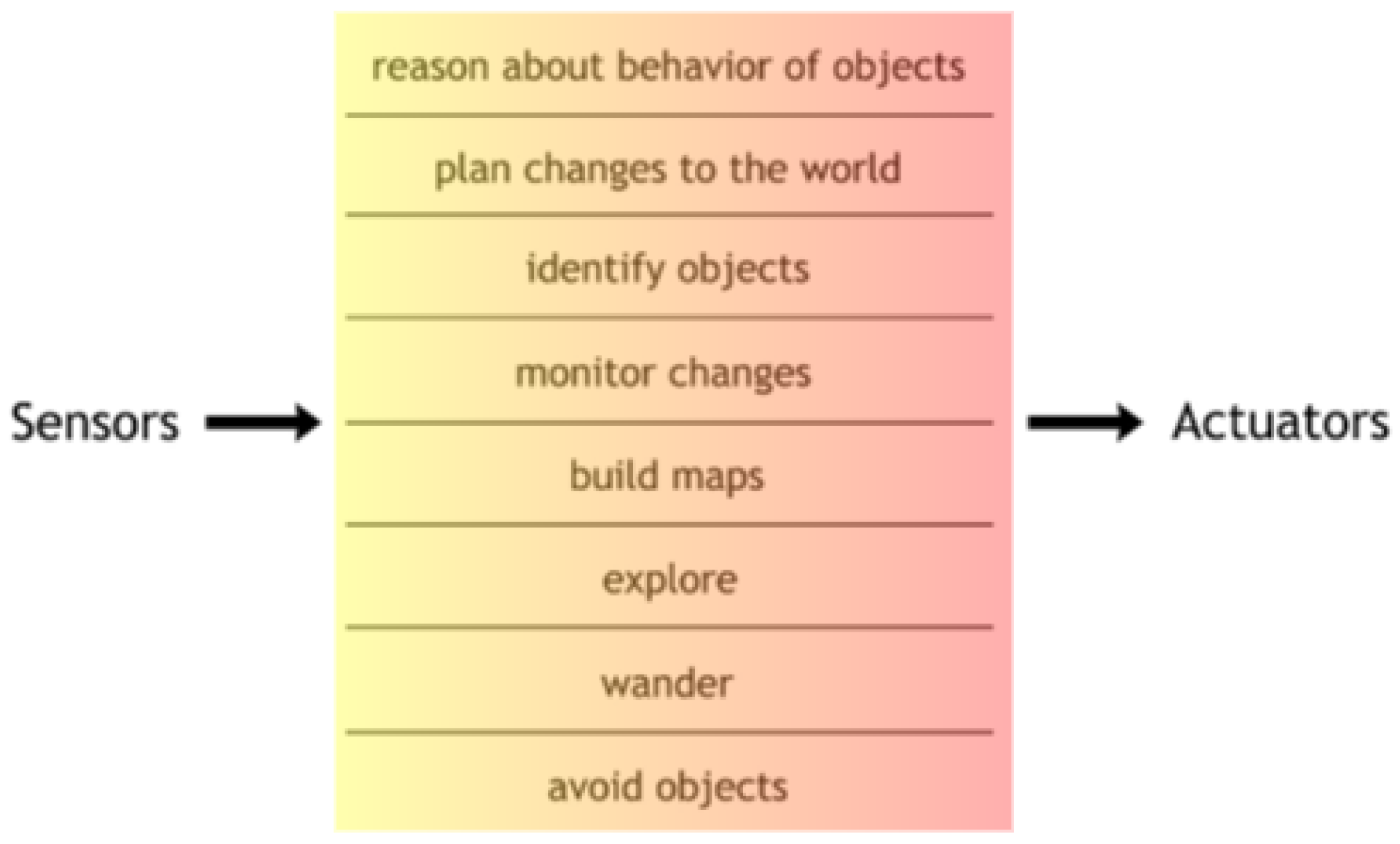
3.2. The Reactive Paradigm
3.3. The Hybrid Deliberate/Reactive Paradigm
4. Robot Control Frameworks
5. Case Study: The FACE Humanoid Emotional Mind
5.1. The FACE Robot
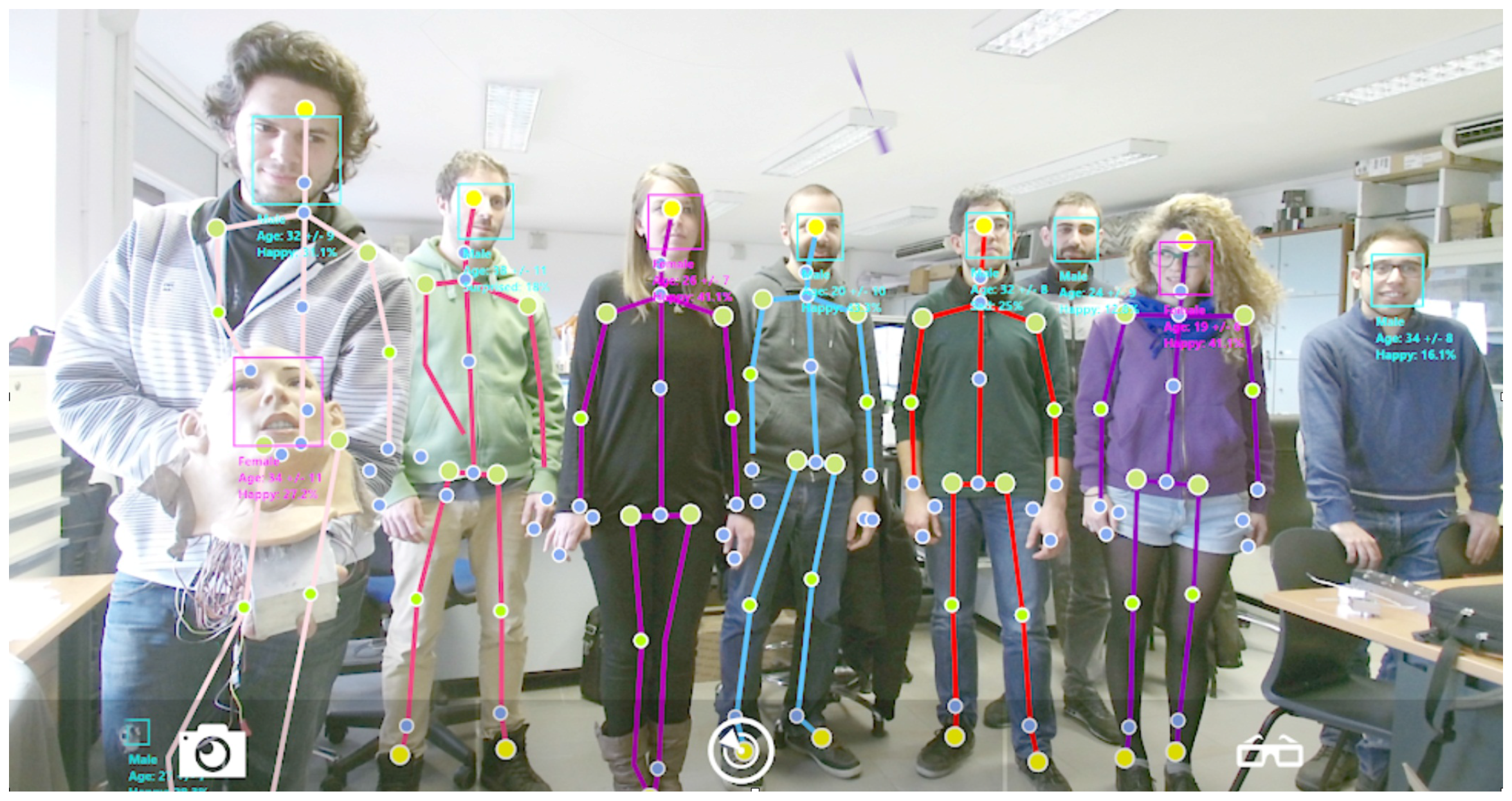
5.2. Sensing the Social World
5.3. Reasoning and Planning: The Social Robot Awareness
5.4. FACE Control Architecture Services
6. Test and Results
6.1. Robot Therapy
6.2. Human–Robot Emotional Interaction
6.3. Robot Entertainment
6.4. Human Behavior and Mind Theory Simulator
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places; Cambridge University Press: New York, NY, USA, 1996. [Google Scholar]
- Hutson, M. The 7 Laws of Magical Thinking: How Irrational Beliefs Keep Us Happy, Healthy, and Sane; Penguin/Hudson Street Press: New York, NY, USA, 2012. [Google Scholar]
- Breazeal, C.; Scassellati, B. Challenges in building robots that imitate people. In Imitation in Animals and Artifacts; Chapter 4; Dautenhahn, K., Nehaniv, C.L., Eds.; The MIT Press: Cambridge, MA, USA, 2002; pp. 363–389. [Google Scholar]
- Picard, R.W. Affective Computing; The MIT Press: Cambridge, MA, USA, 1997. [Google Scholar]
- Pfeifer, R.; Lungarella, M.; Iida, F. Self-organization, embodiment, and biologically inspired robotics. Science 2007, 318, 1088–1093. [Google Scholar] [CrossRef] [PubMed]
- Bar-Cohen, Y.; Breazeat, C. (Eds.) Biologically-Inspired Intelligent Robots; SPIE- International Society for Optical Engineering: Bellingham, DC, USA, 2003. [Google Scholar]
- Brooks, R.A.; Breazeal, C.; Marjanovic, M.; Scassellati, B.; Williamson, M.M. The Cog Project: Building a Humanoid Robot. In Computation for Metaphors, Analogy, and Agents; Lecture Notes in Computer Science; Nehaniv, C., Ed.; Springer: Berlin/Heidelberg, Germany, 1999; Volume 1562, pp. 52–87. [Google Scholar]
- Damasio, A. Descartes’ Error: Emotion, Reason, and the Human Brain; Grosset/Putnam: New York, NY, USA, 1994. [Google Scholar]
- Pfeifer, R.; Bongard, J.C. How the Body Shapes the Way We Think: A New View of Intelligence; Bradford Books; The MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Vernon, D.; Metta, G.; Sandini, G. Embodiment in Cognitive Systems: On the Mutual Dependence of Cognition & Robotics. Cognition 2010, 8, 17. [Google Scholar]
- Glas, D.; Satake, S.; Kanda, T.; Hagita, N. An Interaction Design Framework for Social Robots. In Robotics: Science and Systems; The MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Horton, T.E.; Chakraborty, A.; St. Amant, R. Affordances for robots: A brief survey. AVANT 2012, 3, 70–84. [Google Scholar]
- Dautenhahn, K. Socially intelligent robots: Dimensions of human–robot interaction. Philos. Trans. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Breazeal, C. Emotion and sociable humanoid robots. Int. J. Hum.-Comput. Stud. 2003, 59, 119–155. [Google Scholar] [CrossRef]
- Breazeal, C. Socially intelligent robots. Interactions 2005, 12, 19–22. [Google Scholar] [CrossRef]
- Arkin, R.C.; Mackenzie, D.C. Planning to Behave: A Hybrid Deliberative/Reactive Robot Control Architecture for Mobile Manipulation. In Proceedings of the International Symposium on Robotics and Manufacturing, Maui, HI, USA, 14–18 August 1994; pp. 5–12. [Google Scholar]
- Murphy, R.R. Introduction to AI Robotics, 1st ed.; MIT Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Nilsson, N.J. Shakey The Robot. In Technical Report 323; AI Center, SRI International: Menlo Park, CA, USA, 1984. [Google Scholar]
- Brooks, R. A robust layered control system for a mobile robot. IEEE J. Robot. Autom. 1986, 2, 14–23. [Google Scholar] [CrossRef]
- Arkin, R.C. Behavior-Based Robotics; The MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Giarratano, J.C.; Riley, G.D. Expert Systems: Principles and Programming; Brooks/Cole Publishing Co.: Pacific Grove, CA, USA, 2005. [Google Scholar]
- Jackson, P. Introduction to Expert Systems; Addison-Wesley Pub. Co.: Reading, MA, USA, 1986. [Google Scholar]
- Giarratano, J.C.; Riley, G. Expert Systems, 3rd ed.; PWS Publishing Co.: Boston, MA, USA, 1998. [Google Scholar]
- Leondes, C.T. Expert Systems, Six-Volume Set: The Technology of Knowledge Management and Decision Making for the 21st Century; Academic Press: Cambridge, MA, USA, 2001. [Google Scholar]
- Shortliffe, E.H.; Davis, R.; Axline, S.G.; Buchanan, B.G.; Green, C.C.; Cohen, S.N. Computer-based consultations in clinical therapeutics: Explanation and rule acquisition capabilities of the MYCIN system. Comput. Biomed. Res. 1975, 8, 303–320. [Google Scholar] [CrossRef]
- Lindsay, R.K.; Buchanan, B.G.; Feigenbaum, E.A.; Lederberg, J. DENDRAL: A case study of the first expert system for scientific hypothesis formation. Artif. Intell. 1993, 61, 209–261. [Google Scholar] [CrossRef]
- Mazzei, D.; Lazzeri, N.; Hanson, D.; De Rossi, D. Hefes: A hybrid engine for facial expressions synthesis to control human-like androids and avatars. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, Rome, Italy, 24–27 June 2012; pp. 195–200. [Google Scholar]
- Lazzeri, N.; Mazzei, D.; De Rossi, D. Development and testing of a multimodal acquisition platform for humn–robot interaction affective studies. J. Hum.-Robot Interact. 2014, 3, 1–24. [Google Scholar] [CrossRef]
- Von Uexküll, J. Umwelt und Innenwelt der Tiere; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Zaraki, A.; Pieroni, M.; De Rossi, D.; Mazzei, D.; Garofalo, R.; Cominelli, L.; Dehkordi, M.B. Design and Evaluation of a Unique Social Perception System for Human-Robot Interaction. IEEE Trans. Cognit. Dev. Syst. 2016, 9, 341–355. [Google Scholar] [CrossRef]
- Cominelli, L.; Mazzei, D.; Carbonaro, N.; Garofalo, R.; Zaraki, A.; Tognetti, A.; De Rossi, D. A Preliminary Framework for a Social Robot “Sixth Sense”. In Proceedings of the Conference on Biomimetic and Biohybrid Systems, Edinburgh, UK, 19–22 July 2016; pp. 58–70. [Google Scholar]
- Critchley, H.D.; Wiens, S.; Rotshtein, P.; Öhman, A.; Dolan, R.J. Neural systems supporting interoceptive awareness. Nat. Neurosci. 2004, 7, 189–195. [Google Scholar] [CrossRef] [PubMed]
- Parisi, D. The other half of the embodied mind. Embodied Gr. Cognit. 2011. [Google Scholar] [CrossRef] [PubMed]
- Qureshi, F.; Terzopoulos, D.; Gillett, R. The cognitive controller: A hybrid, deliberative/reactive control architecture for autonomous robots. In Innovations in Applied Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2004; pp. 1102–1111. [Google Scholar]
- Bosse, T.; Jonker, C.M.; Treur, J. Formalisation of Damasio’s theory of emotion, feeling and core consciousness. Conscious. Cognit. 2008, 17, 94–113. [Google Scholar] [CrossRef] [PubMed]
- Damasio, A. Self Comes to Mind : Constructing the Conscious Brain, 1st ed.; Pantheon Books: New York, NY, USA, 2010; p. 367. [Google Scholar]
- Mazzei, D.; Cominelli, L.; Lazzeri, N.; Zaraki, A.; De Rossi, D. I-clips brain: A hybrid cognitive system for social robots. In Biomimetic and Biohybrid Systems; Springer: Berlin/Heidelberg, Germany, 2014; pp. 213–224. [Google Scholar]
- Metta, G.; Fitzpatrick, P.; Natale, L. YARP: Yet Another Robot Platform. Int. J. Adv. Robot. Syst. 2006, 3, 43–48. [Google Scholar] [CrossRef]
- Zaraki, A.; Mazzei, D.; Giuliani, M.; De Rossi, D. Designing and Evaluating a Social Gaze-Control System for a Humanoid Robot. IEEE Trans. Hum.-Mach. Syst. 2014, PP, 1–12. [Google Scholar] [CrossRef]
- Russell, J.A. The circumplex model of affect. J. Personal. Soc. Psychol. 1980, 39, 1161–1178. [Google Scholar] [CrossRef]
- Mazzei, D.; Billeci, L.; Armato, A.; Lazzeri, N.; Cisternino, A.; Pioggia, G.; Igliozzi, R.; Muratori, F.; Ahluwalia, A.; De Rossi, D. The FACE of autism. In Proceedings of the 19th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2010), Viareggio, Italy, 13–15 September 2010; pp. 791–796. [Google Scholar]
- Mazzei, D.; Greco, A.; Lazzeri, N.; Zaraki, A.; Lanatà, A.; Igliozzi, R.; Mancini, A.; Scilingo, P.E.; Muratori, F.; De Rossi, D. Robotic Social Therapy on Children with Autism: Preliminary Evaluation through Multi-parametric Analysis. In Proceedings of the 2012 International Conference on Social Computing (SocialCom) Privacy, Security, Risk and Trust (PASSAT), Amsterdam, The Netherlands, 3–5 September 2012; pp. 955–960. [Google Scholar]
- Lazzeri, N.; Mazzei, D.; Greco, A.; Rotesi, A.; Lanatà, A.; De Rossi, D.E. Can a Humanoid Face be Expressive? A Psychophysiological Investigation. Front. Bioeng. Biotechnol. 2015, 3, 64. [Google Scholar] [CrossRef] [PubMed]
- 20th Century FOX. Morgan | Robots React to the Morgan Trailer. Available online: https://www.youtube.com/watch?v=JqS8DVPiV0E (accessed on 25 August 2016).
- Bechara, A.; Damasio, H.; Tranel, D.; Damasio, A.R. Deciding advantageously before knowing the advantageous strategy. Science 1997, 275, 1293–1295. [Google Scholar] [CrossRef] [PubMed]
- Cominelli, L.; Mazzei, D.; Pieroni, M.; Zaraki, A.; Garofalo, R.; De Rossi, D. Damasio’s Somatic Marker for Social Robotics: Preliminary Implementation and Test. In Biomimetic and Biohybrid Systems; Springer: Berlin/Heidelberg, Germany, 2015; pp. 316–328. [Google Scholar]
- Atzori, L.; Iera, A.; Morabito, G. The internet of things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lazzeri, N.; Mazzei, D.; Cominelli, L.; Cisternino, A.; De Rossi, D.E. Designing the Mind of a Social Robot. Appl. Sci. 2018, 8, 302. https://doi.org/10.3390/app8020302
Lazzeri N, Mazzei D, Cominelli L, Cisternino A, De Rossi DE. Designing the Mind of a Social Robot. Applied Sciences. 2018; 8(2):302. https://doi.org/10.3390/app8020302
Chicago/Turabian StyleLazzeri, Nicole, Daniele Mazzei, Lorenzo Cominelli, Antonio Cisternino, and Danilo Emilio De Rossi. 2018. "Designing the Mind of a Social Robot" Applied Sciences 8, no. 2: 302. https://doi.org/10.3390/app8020302
APA StyleLazzeri, N., Mazzei, D., Cominelli, L., Cisternino, A., & De Rossi, D. E. (2018). Designing the Mind of a Social Robot. Applied Sciences, 8(2), 302. https://doi.org/10.3390/app8020302