Bio-Inspired Optimal Control Framework to Generate Walking Motions for the Humanoid Robot iCub Using Whole Body Models


Abstract
:1. Introduction
- Formulation of the whole-body dynamic model for walking problems for the humanoid robot iCub.
- Formulation of the optimal control problem for a complex walking sequence involving cyclic, as well as non-cyclic motion phases.
- The use of a direct multiple shooting method, which allows solving the equations of motion at a high precision at all times in the gait and to precisely take into account the kinematic and dynamic constraints of the robot.
- Implementation and experimental validation on the HeiCub humanoid, a reduced iCub, with computation of performance indicators as a comparison with motions generated using reduced models.
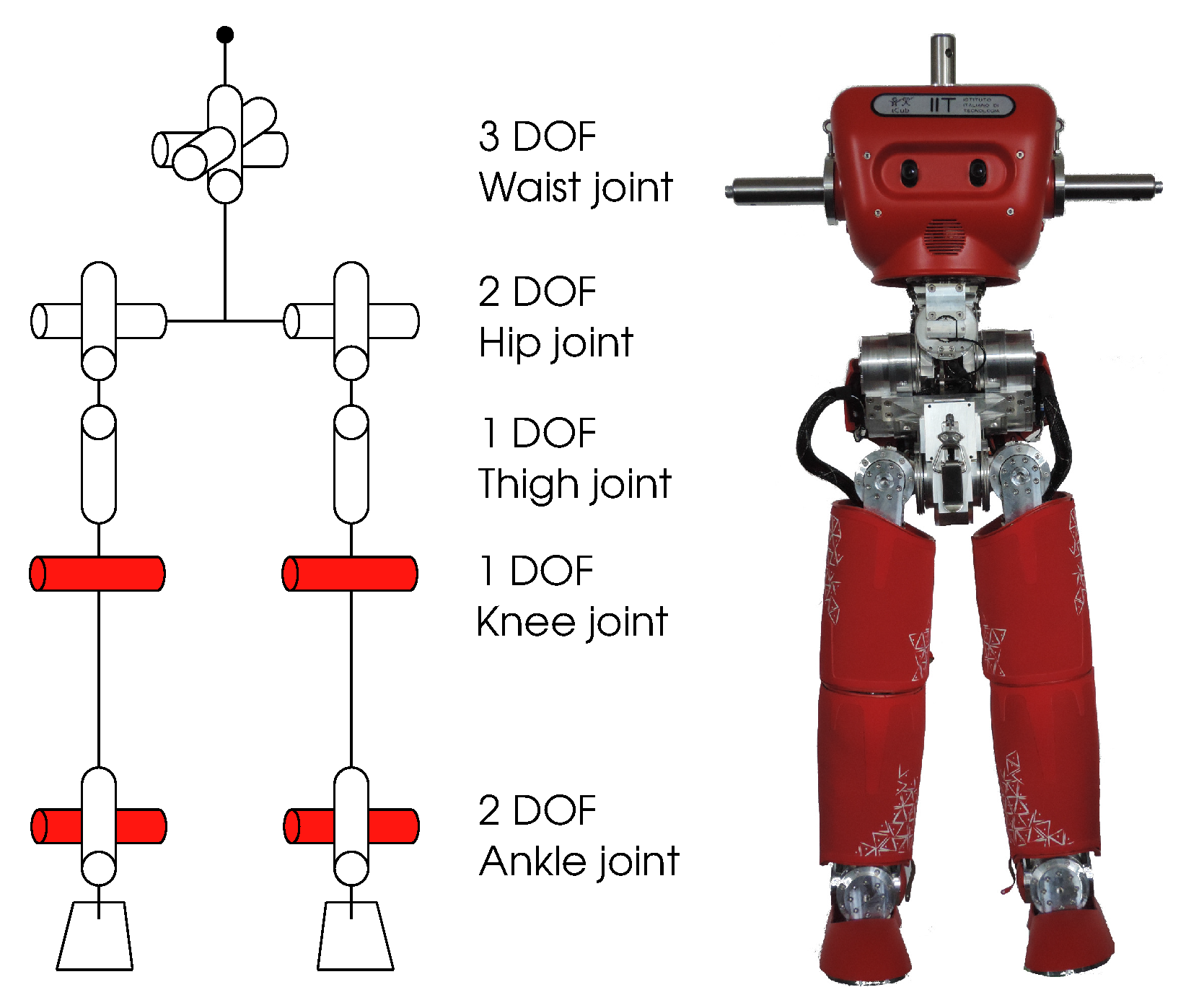
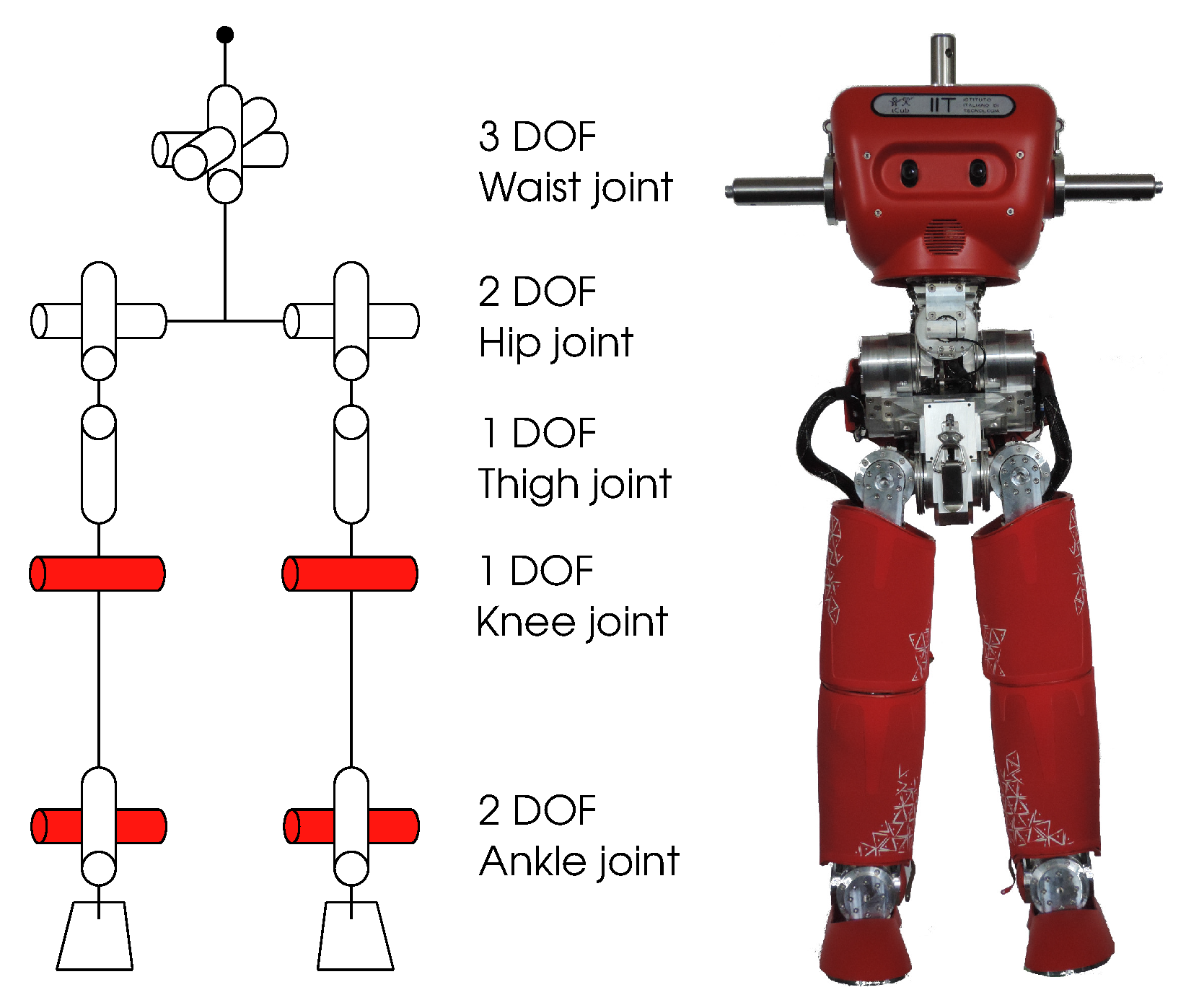
2. The (He)iCub Humanoid Robot
3. Model and Dynamics
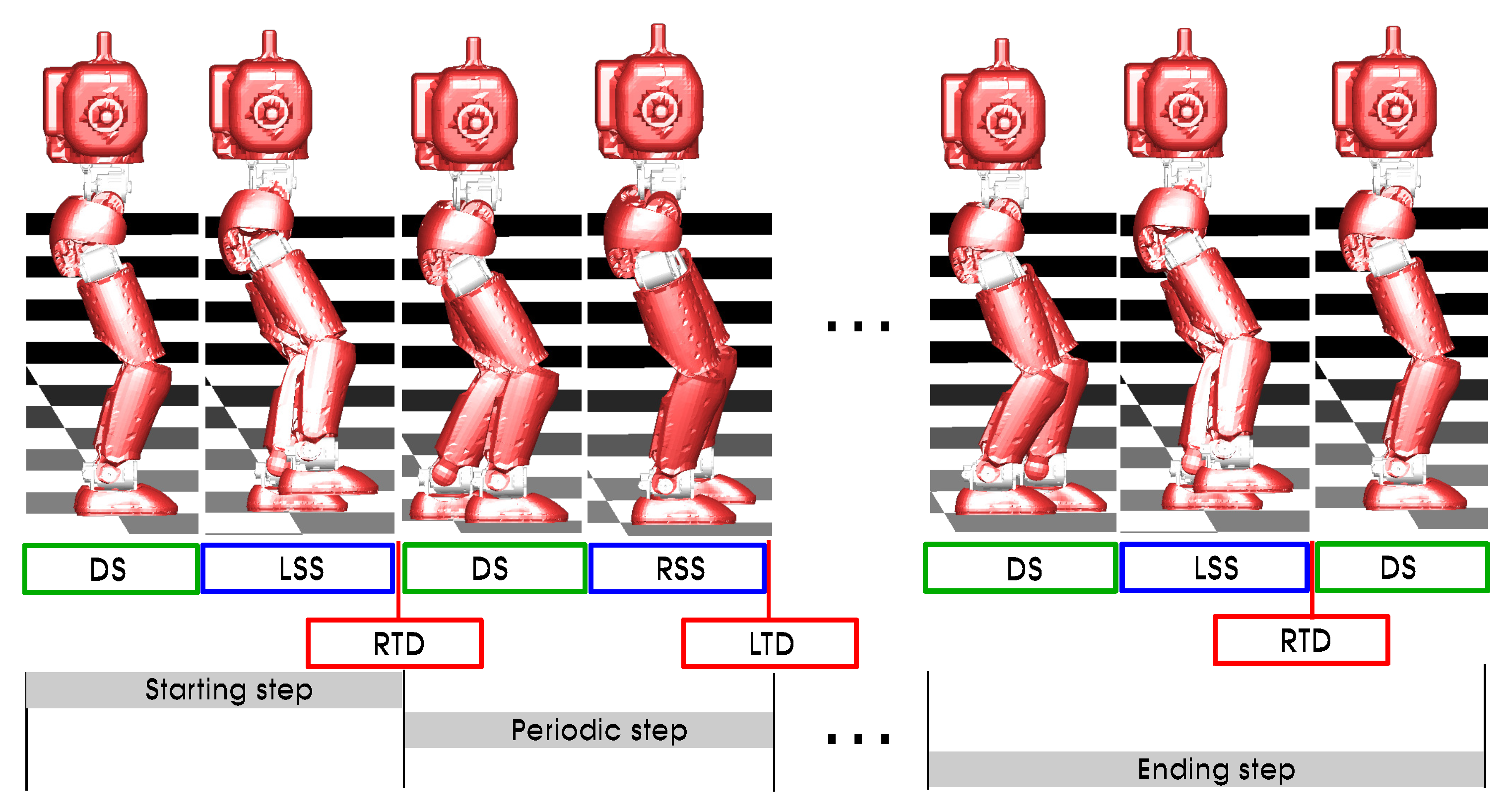
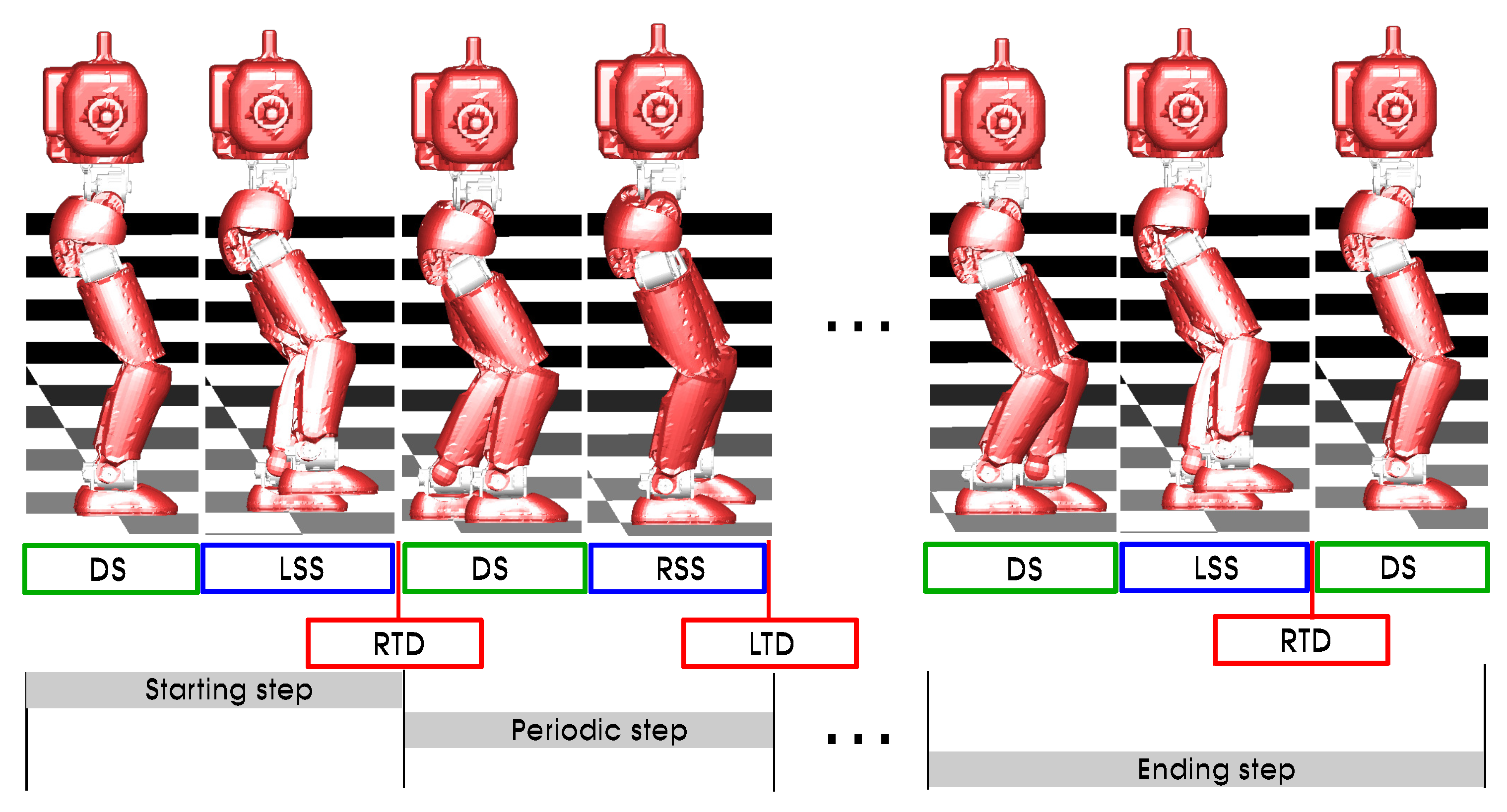
3.1. Walking Phases
- Starting step, the robot starts from a complete stop (i.e., all velocities to zero) and takes the first step, leading to the periodic motion.
- Periodic steps, which are the steps that the robot can repeat during walking. In this case, we assume single-step periodic, i.e., the left and right leg configurations can be mirrored, as the robot is symmetric. The periodicity is enforced on touchdown.
- Ending step, the final step where the robot comes to a complete stop from the periodic motion.
- DS: Double Support, where both feet are on the ground.
- LSS: Left Single Support, where the left foot is on the ground and the right leg swings to the next support location.
- RSS: Right Single Support, as for LSS, the right foot is on the ground and the left leg is swinging.
- RTD: Right Touch Down, when the left foot is in single support and the right foot strikes the ground, we assume that when the foot of the robot touches the ground, it is completely flat.
- LTD: Left Touch Down, the left foot strikes the ground when the right foot is in single support.
3.2. Dynamics
4. Optimal Control Problem
4.1. States, Controls and Parameters
4.2. Constraints
- Joint angles range,
- Joint velocities,
- Torques.
4.3. Objective Functions
- Minimization of joint torques squared, which is always included to ensure smooth torques (with small weighting factor):
- Minimization of absolute mechanical work:
- Minimization of joint accelerations squared in order to obtain smooth velocity trajectories (with small weighting factor):
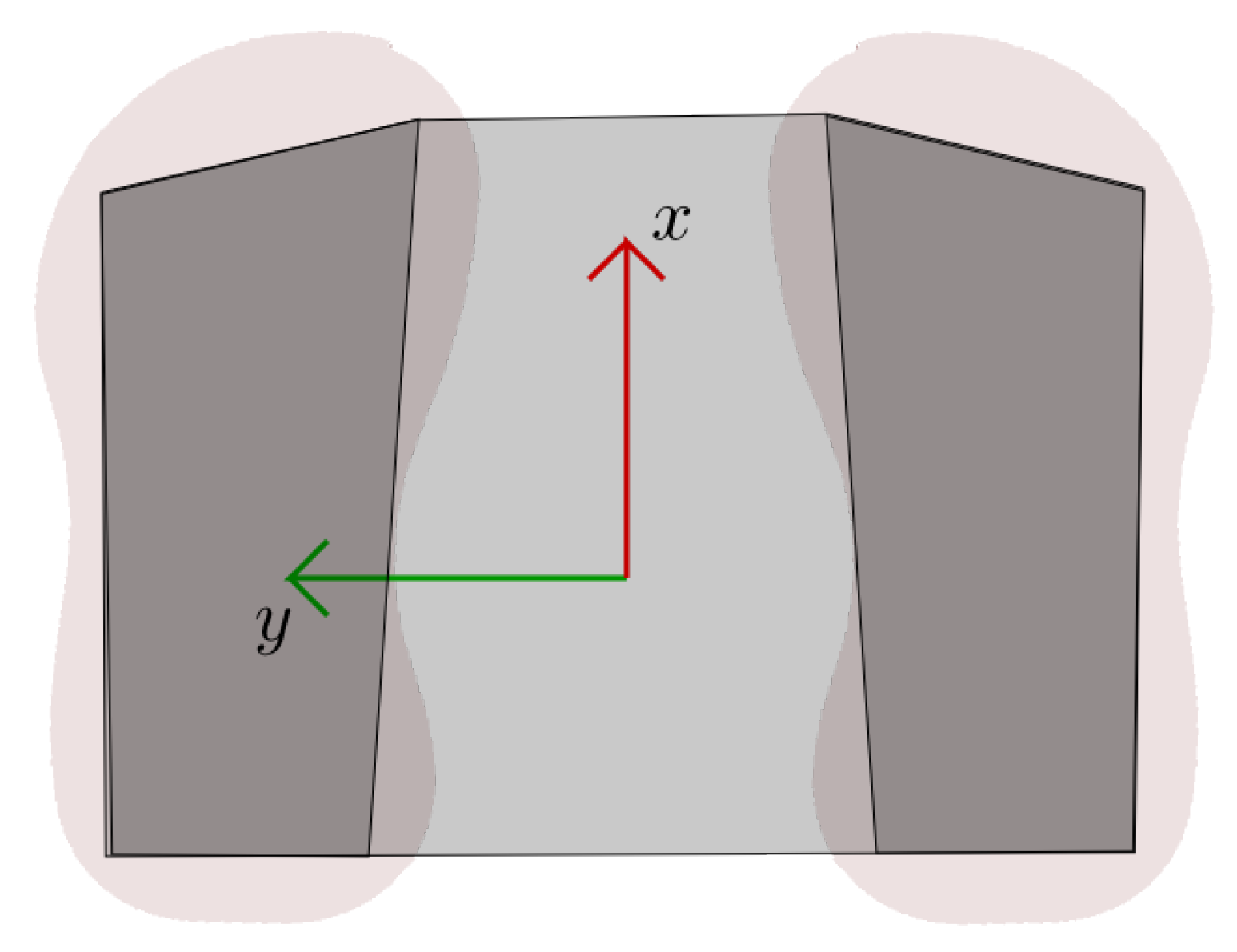
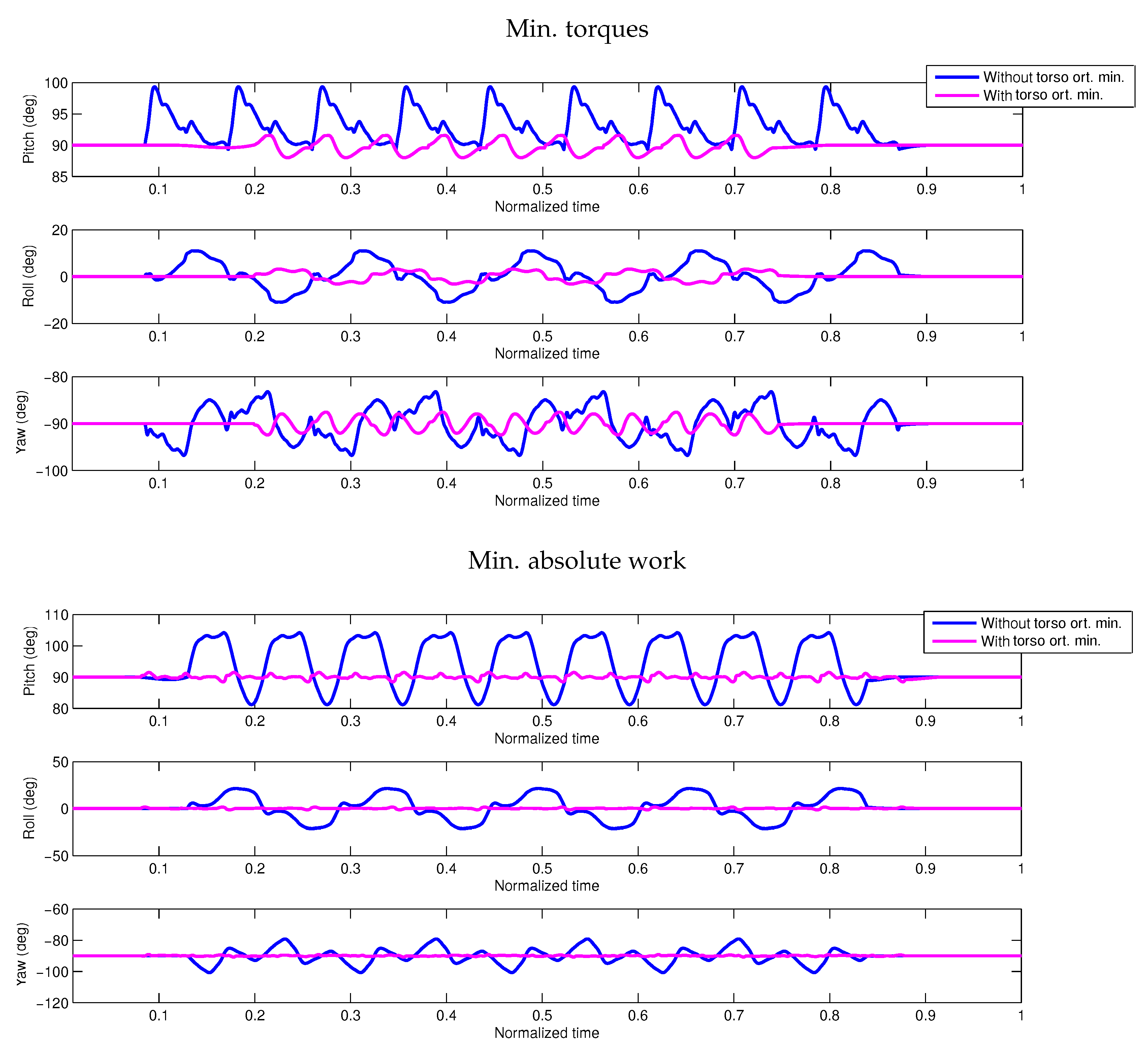
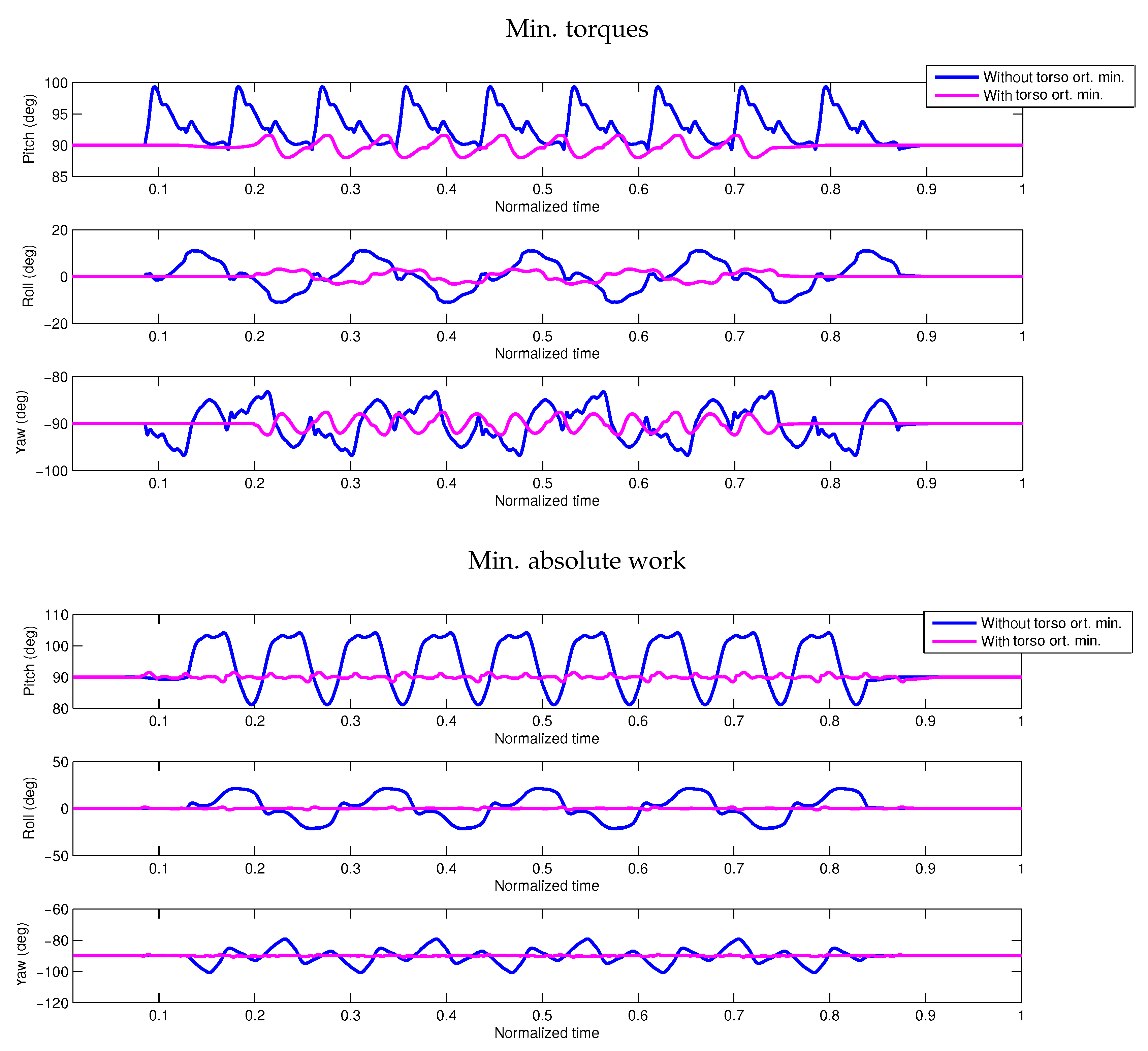
- Torso orientation minimization (ort. min., which is sometimes also referred to as torso stabilization) in terms of torso movements with respect to the world reference:
5. Results
5.1. Software Tools
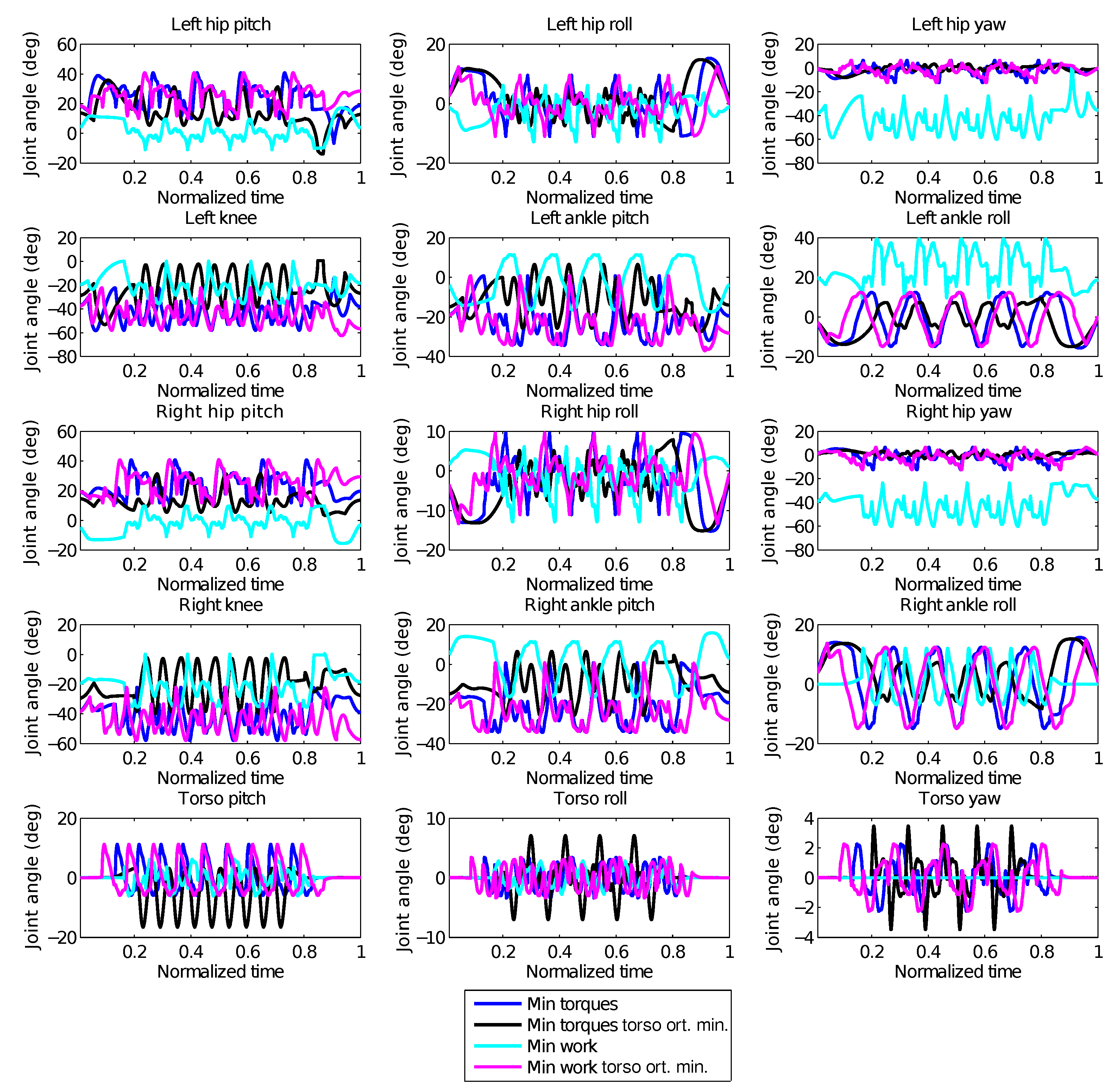
5.2. Numerical Results
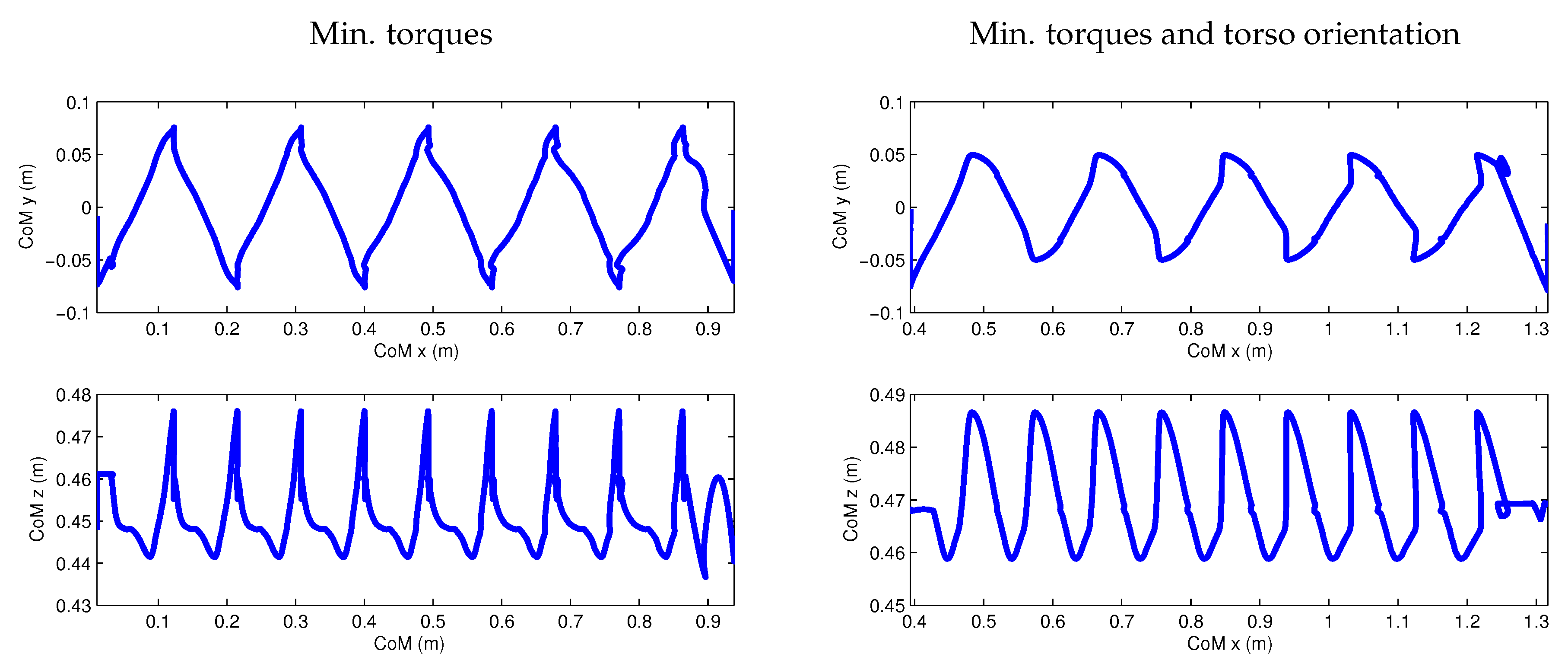
- Minimization of joint torques, with a small weight on minimization of joint accelerations.
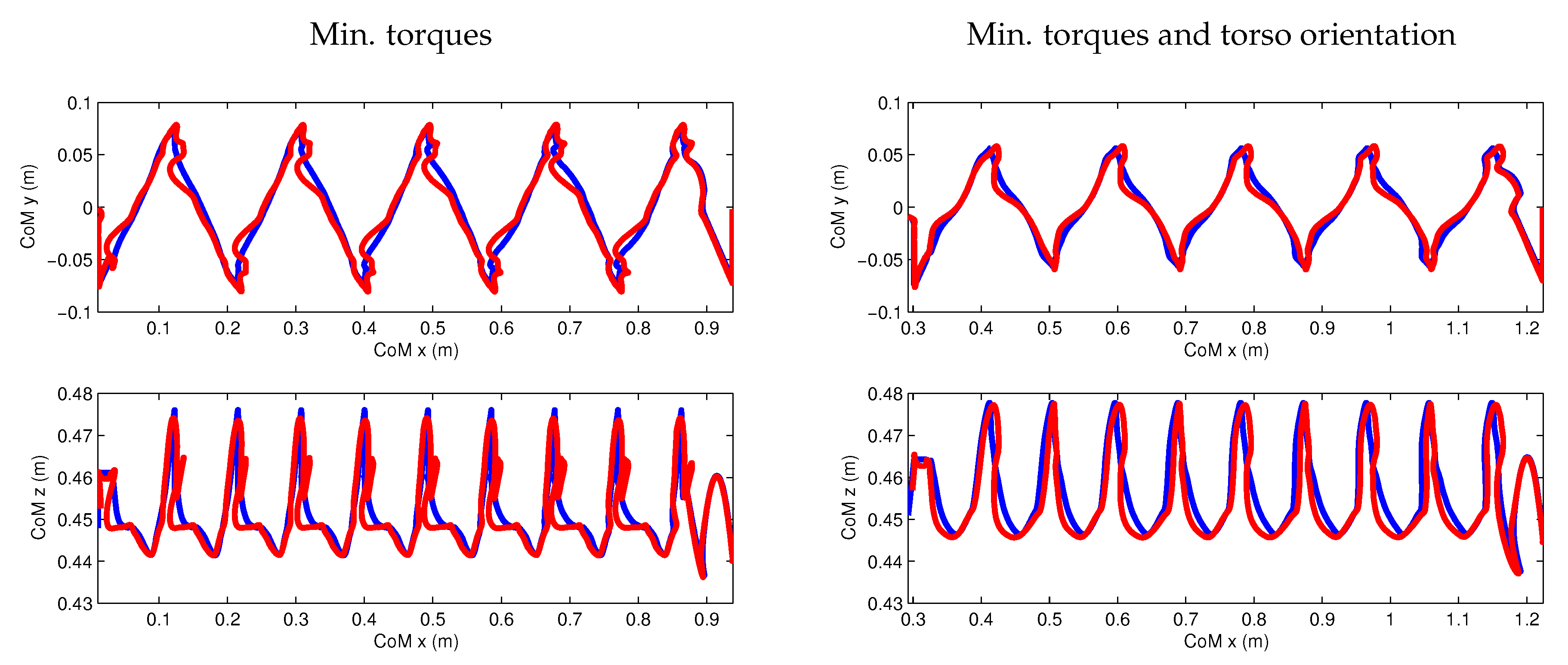
- Minimization of joint torques and torso orientation minimization, with a small weight on minimization of joint accelerations.
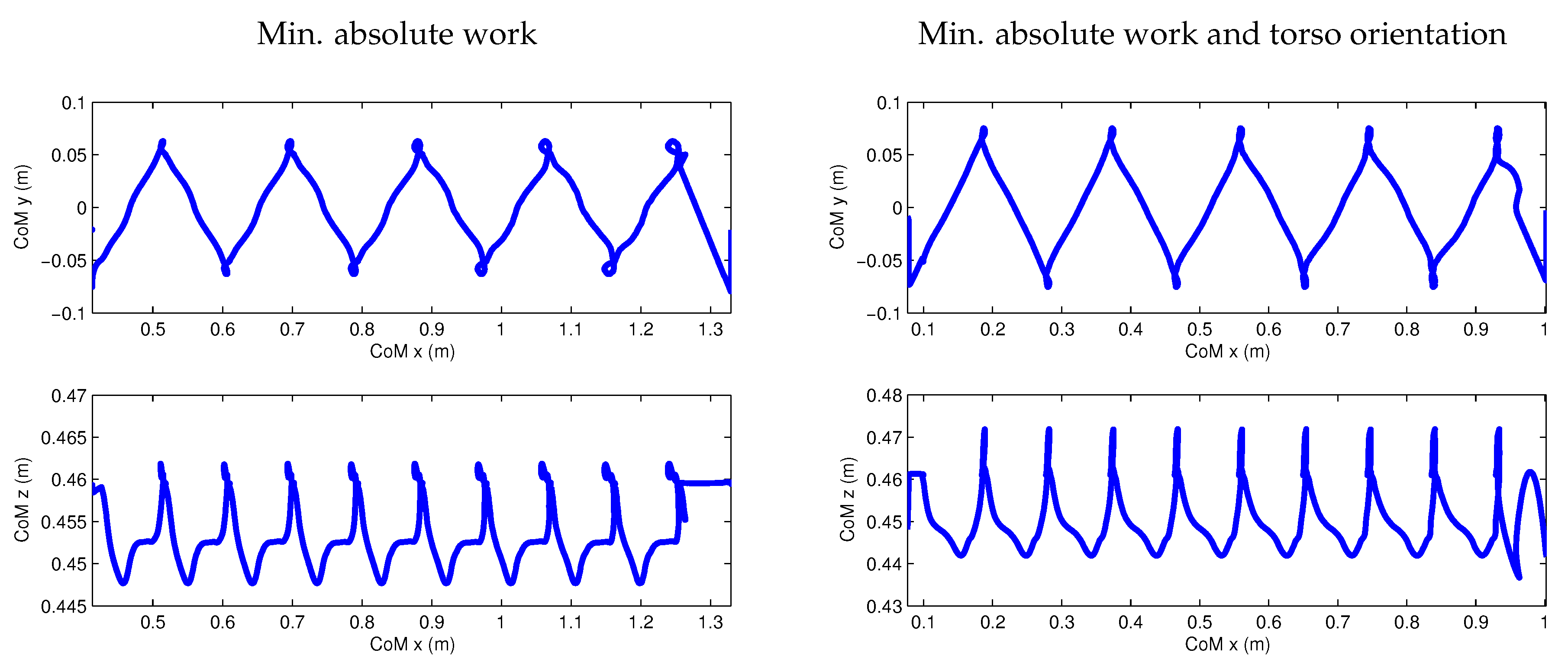
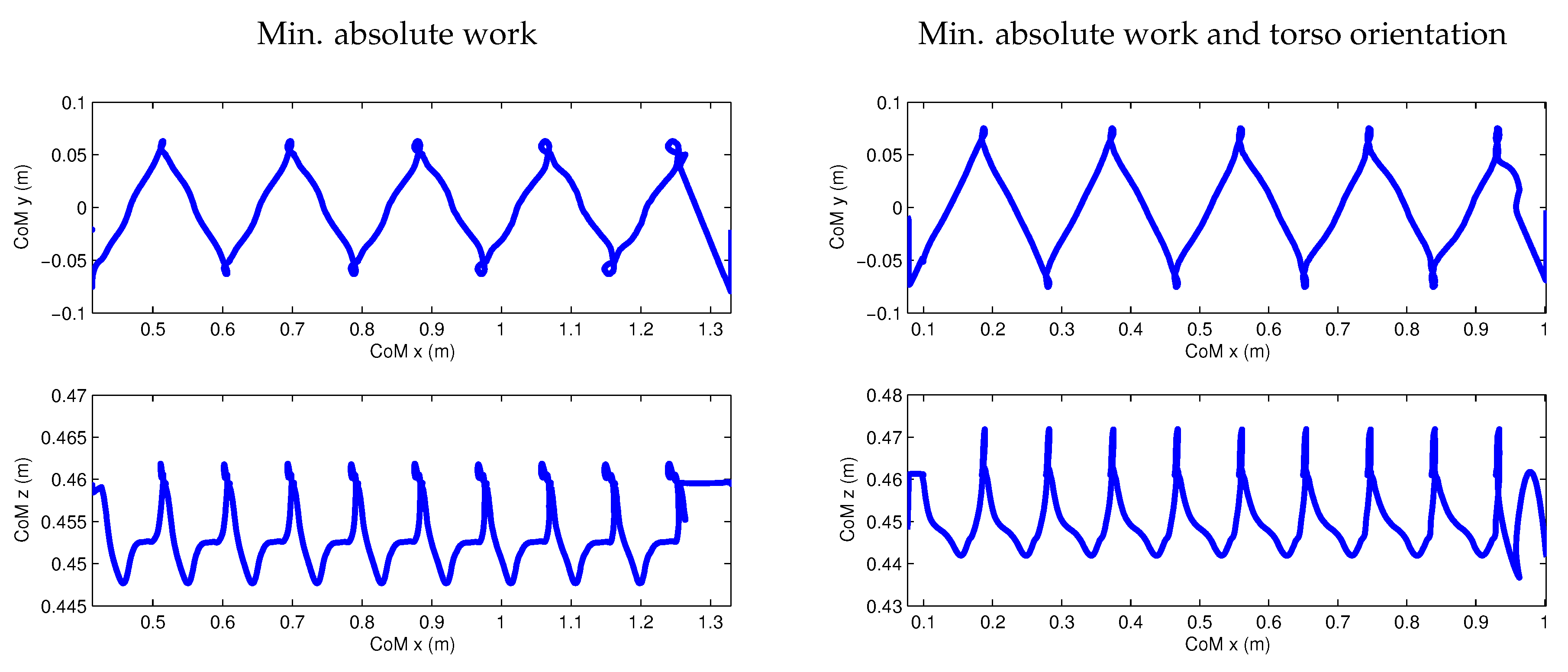
- Minimization of absolute work, with a small weight on minimization of joint torques and joint accelerations.
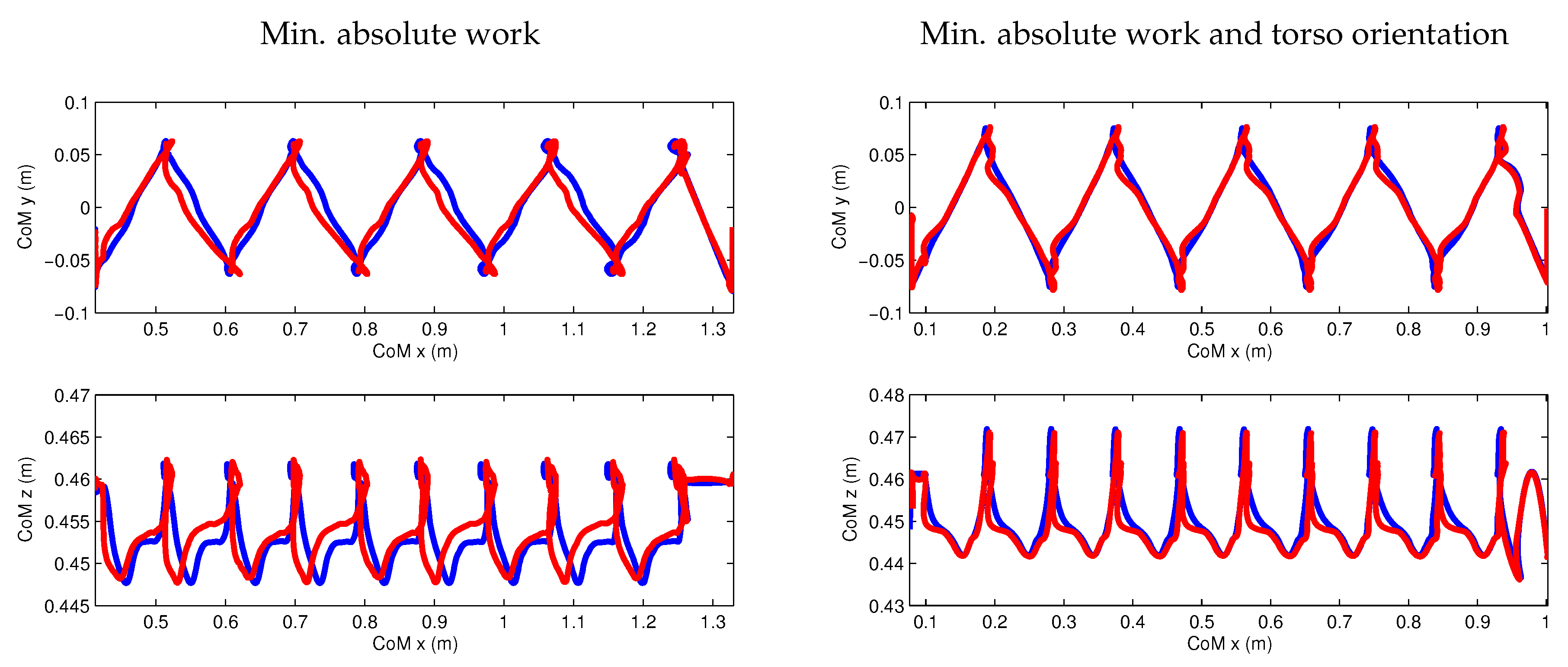
- Minimization of absolute work and torso orientation, with a small weight on minimization of joint torques and joint accelerations.
6. Experimental Validation
Key Performance Indicators
- Walking velocity :The maximum achieved walking velocity; in the case of motions generated with optimal control, this corresponds to the velocity of the resulting sequence.
- Walking timings and step period:Single- and double-support times of a single step, the whole duration of which is indicated as the step period. In the case of optimal control, we consider the timings of the periodic step.
- Cost of transport:The cost of transport is defined as a unitless quantity, where M is the total number of motors, and are the current and voltage measurements of the motor m, is the mass of the robot and d is the traveled distance.
- Froude number:where is the robot leg length. The Froude number is a dimensionless number used in fluid mechanics to characterize the resistance of an object moving through water. Alexander used it to characterize animal locomotion, given the that also legged locomotion is a dynamic motion in gravity [39]. A given Froude number can be assigned to a certain walking style. Running, for example, starts at a Froude number of approximately
- Precision of task execution:Expressed in terms of tracking errors. The root mean square error is computed by summing the squared difference between the measurement and the desired position over all points of the whole trajectory.
7. Discussion and Conclusions
- It is possible to formulate optimal control problems for the iCub/HeiCub robots that allow one to simultaneously generate periodic walking motions, as well as the necessary starting and stopping steps that take the robot from standing position to the periodic cycle, as well as from back to standing position. So far, only single starting and stopping steps have been included in the formulation, but it is straightforward to extend this to multiple steps, which may be required for faster walking.
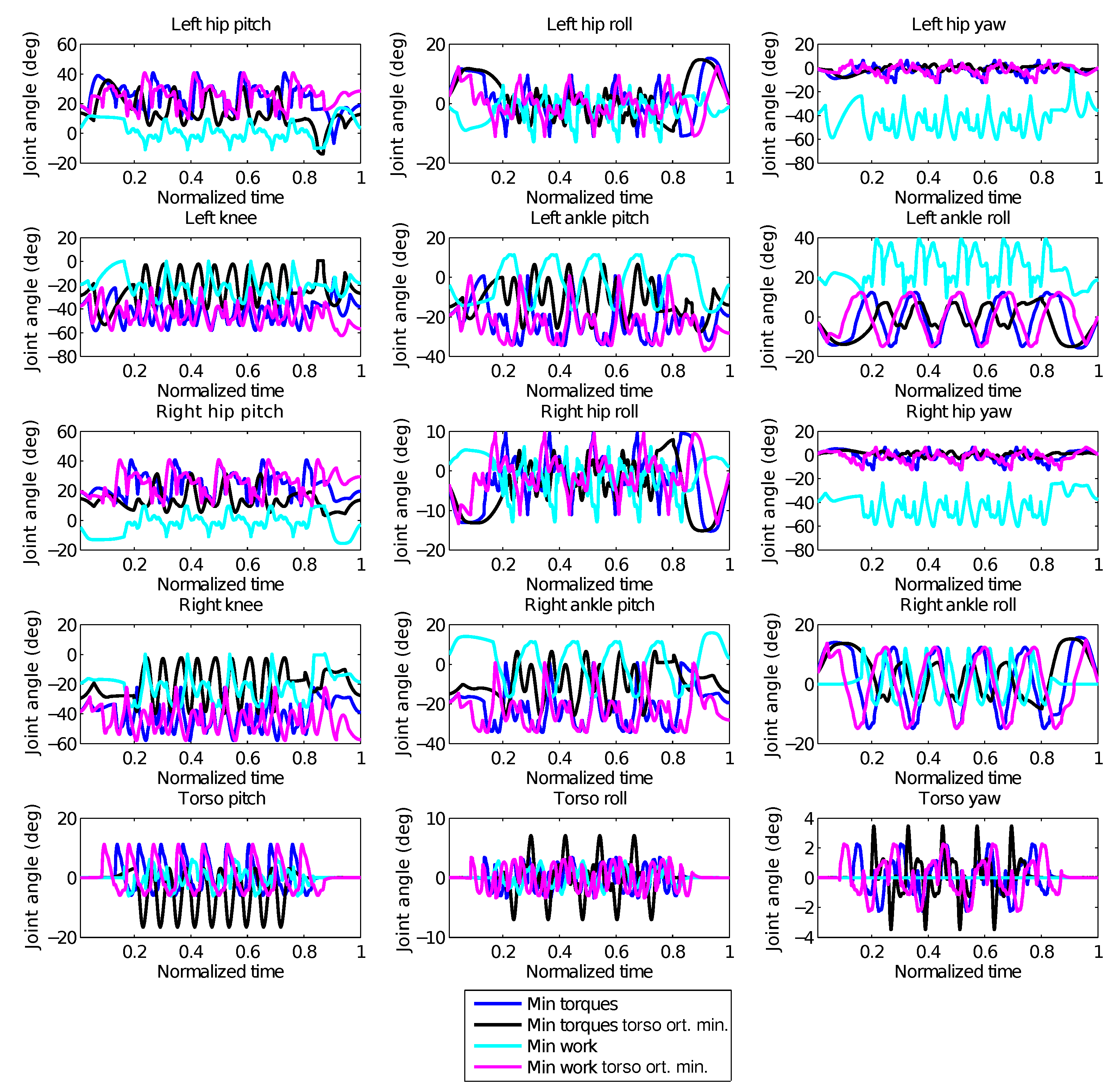
- Different objective functions result in visibly different walking styles for the robot. In particular we have compared a minimization of torques squared and of absolute mechanical work, in both cases with and without a combined term on torso stabilization. A very small term on joint accelerations was present in all objective functions. Further objective functions are the subject of current research. The fact that we are able to generate walking in different styles in an automated way already presents a significant difference from the classical walking generation methods using the simple models for which all outcomes look very similar.
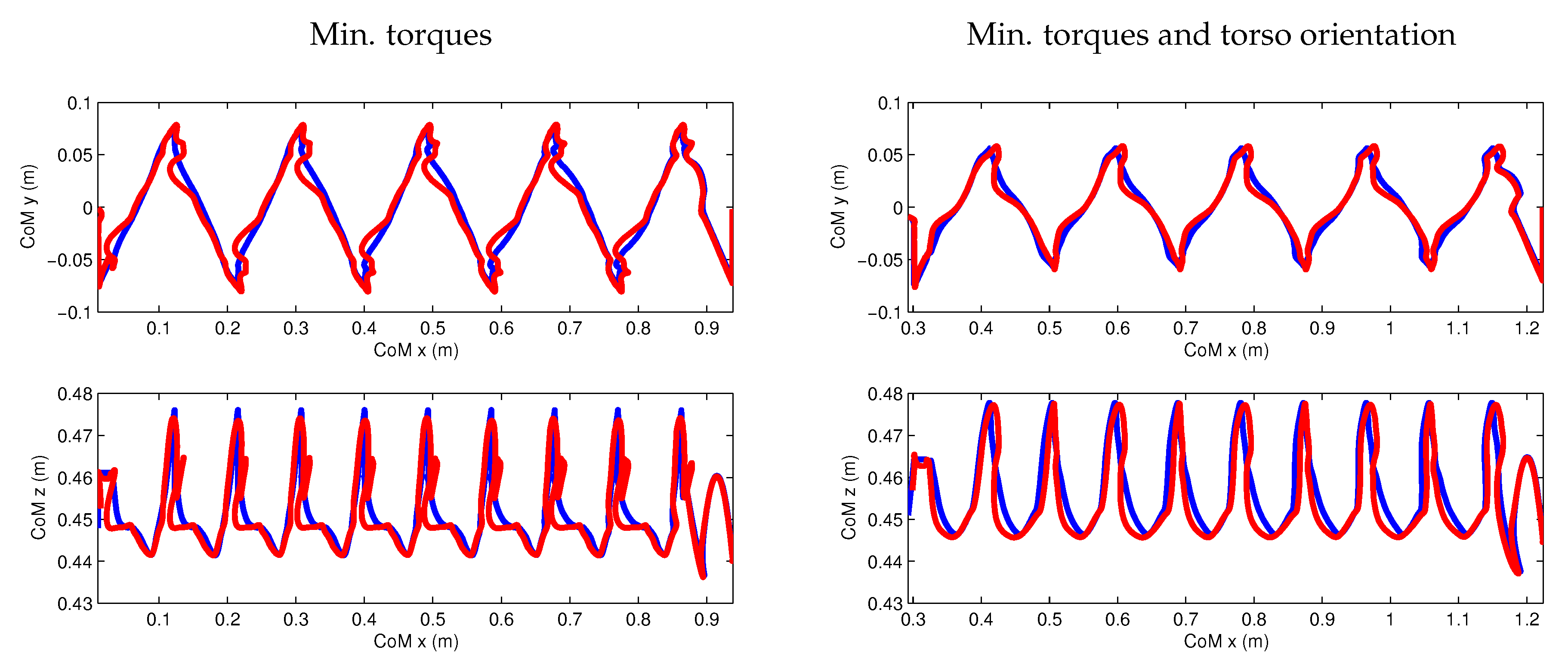
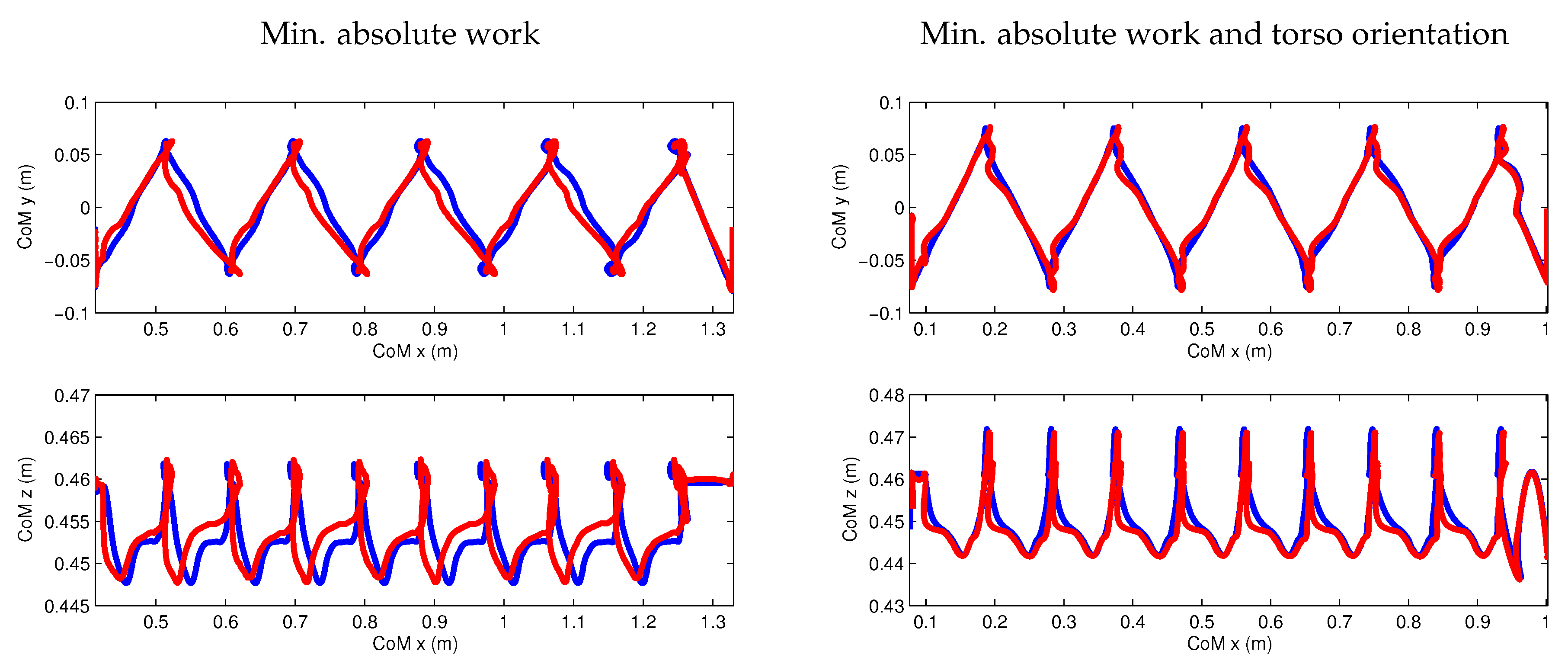
- The resulting motions are still not close to biological motion, but they have made significant progress in the right direction. In particular, the motions show variations in the height of the CoM. See the discussion below for making optimized walking motions more biological or “human-like”.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Vukobratović, M.; Borovac, B. Zero-moment point—Thirty five years of its life. Int. J. Humanoid Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Mukovskiy, A.; Vassallo, C.; Naveau, M.; Stasse, O.; Soueres, P.; Giese, M.A. Adaptive synthesis of dynamically feasible full-body movements for the humanoid robot HRP-2 by flexible combination of learned dynamic movement primitives. Robot. Auton. Syst. 2017, 91, 270–283. [Google Scholar] [CrossRef]
- Ishiguro, Y.; Kojima, K.; Sugai, F.; Nozawa, S.; Kakiuchi, Y.; Okada, K.; Inaba, M. Bipedal Oriented Whole Body Master-Slave System for Dynamic Secured Locomotion with LIP Safety Constraints. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 376–382. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Yokoi, K.; Hirukawa, H. A Realtime Pattern Generator for Biped Walking. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 1–15 May 2002; pp. 31–37. [Google Scholar]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped walking pattern generation by using preview control of zero-moment point. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Taipei, Taiwan, 14–19 September 2003; Volume 2, pp. 1620–1626. [Google Scholar]
- Naveau, M.; Kudruss, M.; Stasse, O.; Kirches, C.; Mombaur, K.; Souères, P. A reactive walking pattern generator based on nonlinear model predictive control. IEEE Robot. Autom. Lett. 2017, 2, 10–17. [Google Scholar] [CrossRef]
- Li, Z.; Tsagarakis, N.G.; Caldwell, D.G. Walking trajectory generation for humanoid robots with compliant joints: Experimentation with COMAN humanoid. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Saint Paul, MN, USA, 14–18 May 2012; pp. 836–841. [Google Scholar]
- Hu, Y.; Eljaik, J.; Stein, K.; Nori, F.; Mombaur, K. Walking of the iCub humanoid robot: Implementation and performance analysis. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 690–696. [Google Scholar]
- Mombaur, K.; Clever, D. Inverse optimal control as a tool to understand human movement. In Geometric and Numerical Foundations of Movements; Laumond, J.P., Mansard, N., Lasserre, J.B., Eds.; Springer STAR Series: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Ames, A.D. Human-inspired control of bipedal walking robots. IEEE Trans. Autom. Control 2014, 59, 1115–1130. [Google Scholar] [CrossRef]
- Mombaur, K. Humanoid Motion Optimization. In Humanoid Robotics—A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Lengagne, S.; Vaillant, J.; Yoshida, E.; Kheddar, A. Generation of whole-body optimal dynamic multi-contact motions. Int. J. Robot. Res. 2013, 32, 1104–1119. [Google Scholar] [CrossRef]
- Miossec, S.; Yokoi, K.; Kheddar, A. Development of a software for motion optimization of robots— Application to the kick motion of the HRP-2 robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kunming, China, 17–20 December 2006; pp. 299–304. [Google Scholar]
- Suleiman, W.; Yoshida, E.; Laumond, J.P.; Monin, A. On humanoid motion optimization. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Pittsburgh, PA, USA, 29 November–1 December 2007; pp. 180–187. [Google Scholar]
- Koch, K.H.; Mombaur, K.; Souères, P. Optimization-based walking generation for humanoids. In IFAC-SYROCO 2012; Elsevier: Amsterdam, The Netherlands, 2012; Volume 45, pp. 498–504. [Google Scholar]
- Koch, K.H.; Mombaur, K.; Souères, P. Studying the Effect of Different Optimization Criteria on Humanoid Walking Motions. In Simulation, Modeling, and Programming for Autonomous Robots; Noda, I., Ando, N., Brugali, D., Kuffner, J.J., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7628, pp. 221–236. [Google Scholar]
- Koch, K.H.; Mombaur, K.; Souères, P.; Stasse, O. Optimization based exploitation of the ankle elasticity of HRP-2 for overstepping large obstacles. In Proceedings of the IEEE/RAS International Conference on Humanoid Robots (Humanoids 2014), Madrid, Spain, 18–20 November 2014; pp. 733–740. [Google Scholar]
- Clever, D.; Harant, M.; Mombaur, K.; Naveau, M.; Stasse, O.; Endres, D. Cocomopl: A novel approach for humanoid walking generation combining optimal control, movement primitives and learning and its transfer to the real robot HRP-2. IEEE Robot. Autom. Lett. 2017, 2, 977–984. [Google Scholar] [CrossRef]
- Clever, D.; Mombaur, K.D. An Inverse Optimal Control Approach for the Transfer of Human Walking Motions in Constrained Environment to Humanoid Robots. In Proceedings of the Robotics: Science and Systems, Ann Arbor, MI, USA, 18–22 June 2016. [Google Scholar]
- Posa, M.; Kuindersma, S.; Tedrake, R. Optimization and stabilization of trajectories for constrained dynamical systems. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1366–1373. [Google Scholar]
- Hereid, A.; Cousineau, E.A.; Hubicki, C.M.; Ames, A.D. 3D dynamic walking with underactuated humanoid robots: A direct collocation framework for optimizing hybrid zero dynamics. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1447–1454. [Google Scholar]
- Metta, G.; Natale, L.; Nori, F.; Sandini, G.; Vernon, D.; Fadiga, L.; Von Hofsten, C.; Rosander, K.; Lopes, M.; Santos-Victor, J.; et al. The iCub humanoid robot: An open-systems platform for research in cognitive development. Neural Netw. 2010, 23, 1125–1134. [Google Scholar] [CrossRef] [PubMed]
- Stein, K.; Hu, Y.; Kudruss, M.; Naveau, M.; Mombaur, K. Closed loop control of walking motions with adaptive choice of directions for the iCub humanoid robot. In Proceedings of the IEEE International Conference on Humanoid Robots (Humanoids), Birmingham, UK, 15–17 November 2017. [Google Scholar]
- Bock, H.; Plitt, K. A Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems; Pergamon Press: Oxford, UK, 1984; pp. 243–247. [Google Scholar]
- Mombaur, K.; Longman, R.; Bock, H.; Schlöder, J. Open-loop stable running. Robotica 2005, 23. [Google Scholar] [CrossRef]
- Tikhanoff, V.; Pattacini, U.; Natale, L.; Metta, G. Exploring affordances and tool use on the iCub. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Atlanta, GA, USA, 15–17 October 2013; pp. 130–137. [Google Scholar]
- Mar, T.; Tikhanoff, V.; Metta, G.; Natale, L. Self-supervised learning of grasp dependent tool affordances on the iCub Humanoid robot. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 3200–3206. [Google Scholar]
- Nori, F.; Traversaro, S.; Eljaik, J.; Romano, F.; Del Prete, A.; Pucci, D. iCub whole-body control through force regulation on rigid non-coplanar contacts. Front. Robot. AI 2015, 2, 6. [Google Scholar] [CrossRef]
- Parmiggiani, A.; Metta, G.; Tsagarakis, N. The mechatronic design of the new legs of the iCub robot. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids), Osaka, Japan, 29 November–1 December 2012; pp. 481–486. [Google Scholar]
- Colasanto, L.; Tsagarakis, N.; Caldwell, D. A Compact Model for the Compliant Humanoid Robot COMAN. In Proceedings of the IEEE International Conference on Biomedical Robotics and Biomechatronics, Rome, Italy, 24–27 June 2012; pp. 688–694. [Google Scholar]
- Dallali, H.; Kormushev, P.; Li, Z.; Caldwell, D. On Global Optimization of Walking Gaits for the Compliant Humanoid Robot, COMAN Using Reinforcement Learning. Cybern. Inf. Technol. 2012, 12, 39–52. [Google Scholar] [CrossRef]
- Moro, F.L.; Tsagarakis, N.G.; Caldwell, D.G. Walking in the resonance with COMAN robot with trajectories based on human kinematic motion primitives (kMPs). Auton. Robot. 2014, 36, 331–347. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Laffranchi, M.; Vanderborght, B.; Caldwell, D.G. A Compact Soft Actuator Unit for Small Scale Human Friendly Robots. In Proceedings of the International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2–17 May 2009; pp. 4356–4362. [Google Scholar]
- Felis, M.; Mombaur, K.D.; Berthoz, A. An Optimal Control Approach to Reconstruct Human Gait Dynamics from Kinematic Data. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015. [Google Scholar]
- Hu, Y.; Mombaur, K. Analysis of human leg joints compliance in different walking scenarios with an optimal control approach. In Proceedings of the 6th IFAC International Workshop on Periodic Control Systems (PSYCO 2016), Eindhoven, The Netherlands, 29 June–1 July 2016; Volume 49, pp. 99–106. [Google Scholar]
- Ketchel, J.; Larochelle, P. Collision detection of cylindrical rigid bodies for motion planning. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Orlando, FL, USA, 15–19 May 2006; pp. 1530–1535. [Google Scholar]
- Leinweber, D.; Bauer, I.; Bock, H.; Schloeder, J. An efficient multiple shooting based reduced SQP strategy for large-scale dynamic process optimization. Part I: Theoretical aspects. Comput. Chem. Eng. 2003, 27, 157–166. [Google Scholar] [CrossRef]
- Felis, M.L. RBDL: An efficient rigid-body dynamics library using recursive algorithms. Auton. Robot. 2017, 41, 495–511. [Google Scholar] [CrossRef]
- Alexander, R.M. Principles of Animal Locomotion; Princeton University Press: Princeton, NJ, USA, 2003. [Google Scholar]
- Hu, Y.; Nori, F.; Mombaur, K. Squat Motion Generation for the Humanoid Robot iCub with Series Elastic Actuators. In Proceedings of the IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 207–212. [Google Scholar]
- Hu, Y.; Mombaur, K. Optimal Control Based Push recovery Strategy for the humanoid robot iCub with Series Elastic Actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 5842–5852. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Range Limits (deg) | Velocity Limits (deg/s) | Torque Limits (Nm/s) |
|---|---|---|---|
| l_hip_pitch, r_hip_pitch | [−33, 100] | [−100, 100] | [−50, 50] |
| l_hip_roll, r_hip_roll | [−19, 90] | [−150, 150] | [−50, 50] |
| l_hip_yaw, r_hip_yaw | [−75, 75] | [−150, 150] | [−50, 50] |
| l_knee, r_knee | [−100, 0] | [−150, 150] | [−50, 50] |
| l_ankle_pitch, r_ankle_pitch | [−36, 27] | [−150, 150] | [−50, 50] |
| l_ankle_roll, r_ankle_roll | [−24, 24] | [−150, 150] | [−50, 50] |
| torso_pitch | [−20, 60] | [−150, 150] | [−50, 50] |
| torso_roll | [−26, 26] | [−150, 150] | [−50, 50] |
| torso_yaw | [−50, 50] | [−150, 150] | [−50, 50] |
| Objectives | ||||
|---|---|---|---|---|
| 1 | 1 | 0 | 0 | |
| 2 | 1 | 0 | 10 | |
| 3 | 1 | 0 | ||
| 4 | 1 | 10 |
| KPIs | Cart-Table | NMPC (LIPM) | Min Torques | Min Torques and Torso ort. | Min Work | Min Work and Torso ort. |
|---|---|---|---|---|---|---|
| (m/s) | 0.037 | 0.065 | 0.053 | 0.079 | 0.043 | 0.053 |
| (s) | 1.5/1.0 | 0.6/0.6 | 1.06/0.98 | 0.7/0.37 | 1.06/1 | 0.8/0.8 |
| step period (s) | 2.5 | 1.2 | 2.04 | 1.07 | 2.06 | 1.6 |
| Cost of Transport | 4.27 | 2.99 | 2.69 | 1.97 | 3.32 | 3.09 |
| Froude Number | 0.017 | 0.029 | 0.024 | 0.035 | 0.019 | 0.024 |
| Joint error (deg) | 1.45 | 1.21 | 1.27 | 1.29 | 1.11 | 0.9 |
| CoM error (cm) | 0.61 | 0.44 | 0.29 | 0.31 | 0.39 | 0.29 |
| KPIs | Cart-Table | NMPC (LIPM) | Min Torques | Min Torques and Torso ort. | Min Work | Min Work and Torso ort. |
|---|---|---|---|---|---|---|
| Cost of Transport | 3.99 | 2.54 | 2.49 | 2.30 | 2.56 | 2.67 |
| Joint error (deg) | 1.35 | 1.12 | 1.19 | 1.22 | 1.08 | 0.9 |
| CoM error (cm) | 0.59 | 0.42 | 0.25 | 0.28 | 0.36 | 0.27 |
| KPIs | Cart-Table | NMPC (LIPM) | Min Torques | Min Torques and Torso ort. | Min Work | Min Work and Torso ort. |
|---|---|---|---|---|---|---|
| Cost of Transport | 4.33 | 3.10 | 2.89 | 1.90 | 3.31 | 3.19 |
| Joint error (deg) | 1.65 | 1.20 | 1.37 | 1.39 | 1.20 | 1.0 |
| CoM error (cm) | 0.63 | 0.46 | 0.31 | 0.35 | 0.40 | 0.32 |
| KPIs | Cart-Table | NMPC (LIPM) | Min Torques | Min Torques & Torso ort. | Min Work | Min Work & Torso ort. |
|---|---|---|---|---|---|---|
| Cost of Transport | 4.05 | 2.64 | 2.54 | 2.20 | 2.61 | 2.62 |
| Joint error (deg) | 1.35 | 1.15 | 1.20 | 1.20 | 1.08 | 0.85 |
| CoM error (cm) | 0.61 | 0.43 | 0.26 | 0.30 | 0.38 | 0.27 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Mombaur, K. Bio-Inspired Optimal Control Framework to Generate Walking Motions for the Humanoid Robot iCub Using Whole Body Models. Appl. Sci. 2018, 8, 278. https://doi.org/10.3390/app8020278
Hu Y, Mombaur K. Bio-Inspired Optimal Control Framework to Generate Walking Motions for the Humanoid Robot iCub Using Whole Body Models. Applied Sciences. 2018; 8(2):278. https://doi.org/10.3390/app8020278
Chicago/Turabian StyleHu, Yue, and Katja Mombaur. 2018. "Bio-Inspired Optimal Control Framework to Generate Walking Motions for the Humanoid Robot iCub Using Whole Body Models" Applied Sciences 8, no. 2: 278. https://doi.org/10.3390/app8020278
APA StyleHu, Y., & Mombaur, K. (2018). Bio-Inspired Optimal Control Framework to Generate Walking Motions for the Humanoid Robot iCub Using Whole Body Models. Applied Sciences, 8(2), 278. https://doi.org/10.3390/app8020278